

서론
관련문헌 고찰
1. 화물차 군집주행 기술 동향
2. 자율주행 및 군집주행 도입에 따른 용량 추정 연구
3. 도로 용량 관련 연구
4. 시사점
분석방법론
1. 군집주행 시뮬레이션 구현
2. 화물차 군집주행을 고려한 용량 추정
분석 결과
1. 화물차 군집주행 시행 전후 비교
2. 군집주행 시나리오 그룹별 운영 파라미터 특성 분석
3. 용량 증대를 최대로 하는 군집 운영전략
결론 및 향후 연구과제
서론
V2X 기반의 무선 통신 기술이 장착된 자율주행차량은 주변 차량뿐만 아니라 도로 인프라와 끊임없이 주행 정보를 주고받으며 군집주행 서비스가 가능하다. 군집주행은 2대 이상의 차량이 줄지어 주행하는 방식으로, 교통 혼잡의 감소, 안전성과 연료소비효율의 증대를 기대할 수 있다(Segata et al., 2014; Zheng et al., 2016). 교통 운영효율성 측면에서 군집주행은 차량간격과 속도를 일정하게 유지함으로써 통과교통량이 증가하고, 이는 도로 용량 증대에 기여할 수 있다. 또한 짧은 차두간격을 유지하며 주행하기 때문에 속도의 분산이 감소하여 사고발생 가능성을 감소시킨다(Amoozadeh et al., 2015). 특히 화물차량은 교통정체 및 사고를 발생시킬 개연성이 높기 때문에(Rowangould, 2013) 화물차 군집주행이 시행될 경우 운영효율성과 안전성이 향상될 것으로 기대된다. 또한 장거리를 운전하는 트럭 운전자의 작업부하를 감소시켜 노동력 저감에 기여할 수 있다(Tsugaws et al., 2011).
화물차 군집주행의 효과는 교통체계 전반에 영향을 미칠 것으로 판단되며, 사회적 비용 문제도 해결할 수 있을 것으로 기대된다. 국토교통부에서 제시하는 국가물류비는 2012년 이후 매년 증가하는 추세로 나타났으며, 2015년에는 약 168조원으로 산정되었다(The Korea Transport Institute, 2017). 이 중 수송비가 약 120조원(71.2%)으로 가장 많은 비중을 차지하며, 수송비의 약 92.2%가 도로부문이 차지함에 따라 도로 화물 운송체계를 전환하는 대책이 시급하다. 수송비는 연료비와 인건비 등으로 산정되는데 화물차 군집주행 시행 시 연료절감 및 운전자 임금 감소와 같은 효과로 인해 수송비 절감이 가능할 것으로 판단된다(Tsugawa et al., 2011). 이에 화물차 군집주행은 국가 물류비 증가 문제를 해결하는데 기여할 수 있으며, 도로부문의 화물운송 경쟁력을 강화하는데 매우 효과적인 전략이 될 것으로 기대된다.
고속도로에 화물차 군집주행과 같은 새로운 교통시스템 도입 시 도로의 운영 상태를 평가하고 판단하는데 용량은 중요한 지표로 활용된다. 화물차 군집주행은 상용화에 앞서 일반차량과 혼재된 상황(mixed-traffic)일 경우 교통류의 성능을 저하시키지 않는 범위 내에서 수행되어야 한다. 또한 국가 물류비 절감에 기여하기 위해서는 도로 용량이 증대되도록 군집 운영전략을 수립해야한다. 따라서 본 연구에서는 고속도로에 화물차 군집주행 도입이 도로 용량에 미치는 영향 분석을 수행하고, 용량 증대 효과가 가장 큰 군집 운영전략을 제시하고자 한다. 일반차로와 군집주행가능차로로 구분하여 용량을 추정하였으며, 군집주행가능차로의 용량은 선행차량과 후행차량의 차종에 따른 구성비와 차두시간을 고려하여 산정하였다. 본 연구의 결과는 교통 운영자 및 관리자에게 용량 증대 효과가 가장 큰 군집주행 운영전략을 제시하는데 의의가 있다. 한편, 군집주행의 주체가 되는 운송실무자는 노동력 저감 및 수송비 절감과 같은 긍정적인 효과가 기대된다.
본 연구의 구성은 다음과 같다. 2장에서는 화물차 군집주행 기술 동향과 자율주행 및 군집주행 환경에서 용량 증대 효과 관련 문헌을 검토하였다. 3장에서는 시뮬레이션을 이용하여 군집차량과 일반차량이 혼재된 상황에서 용량을 추정하기 위한 방법론을 제시하였다. 4장에서는 군집주행 시행 전후 차로별 용량 추정결과를 제시하고, 군집주행 운영 파라미터가 용량에 미치는 영향 분석을 수행하였다. 마지막 장에서는 본 연구의 연구결과를 요약하고, 연구의 활용방안 및 향후 연구과제에 대해 서술하였다.
관련문헌 고찰
본 연구는 화물차 군집주행이 고속도로 용량에 미치는 영향 분석을 수행하고자 한다. 이와 관련하여 화물차 군집주행의 기술동향을 파악함으로써, 시뮬레이션 시나리오 수립 시 운영 파라미터를 설정하는데 활용하였다. 또한 고속도로의 용량을 추정하는데 있어 개념과 관련문헌을 고찰하고, 기존 연구와의 차별성을 제시하였다.
1. 화물차 군집주행 기술 동향
화물차 군집주행은 1995년 유럽의 Chauffeur project를 시작으로 차량간 통신(Vehicle to vehicle, V2V)이 가능한 3대의 화물차량이 10m 간격을 유지하며 실제 도로 주행이 수행되었다. 군집의 선두차량은 운전자 조작에 따라 제동, 가속, 조향 등을 수행하고, 군집내 추종차량은 운전자의 조작 없이 차량의 제어기능을 자동화함으로써 동일한 속도를 유지하며 주행하는데 성공하였다(Fritz, 2004; Gehring and Fritz, 1997). 독일의 KONVOI project는 도로부문의 화물 수송량 증가 및 도로용량 증대를 목적으로 4대의 화물차량이 군집주행을 수행한 것으로 보고되었다(Kunze et al., 2011). 이후, SARTRE project는 차량제조회사 볼보와 협력하여 화물차 2대와 승용차 3대가 6m 간격을 유지하며 군집주행을 수행하는데 성공하였다(Robinson et al., 2010). 추가적으로, 차간거리를 최소화한 대표적인 군집주행 프로젝트로 미국의 PATH와 일본의 eITS project에서는 군집내간격을 4m로 설정한 것으로 보고되었다(Shaladover, 2010; Tsugawa, 2014). 유럽에서는 2020년에 SAE level 3에 해당하는 2대 또는 3대의 화물차량이 0.3초 간격을 유지하며 군집주행을 수행할 것으로 보고하였다. 또한 2025년에는 군집의 선두차량을 제외한 차량은 운전자의 조작 없이 자동화된 자율주행을 수행함으로써 SAE level 4 수준에 도달할 것으로 예상된다(EU, 2016).
2. 자율주행 및 군집주행 도입에 따른 용량 추정 연구
군집주행은 2대 이상의 차량이 줄지어 주행하는 방식으로 차량간격을 보다 가깝고, 일정하게 유지함으로써 기존 도로 용량을 증대시킬 것으로 기대된다(Fagnant and Kockelman, 2015). 자율주행차량이 군집주행을 수행하기 위하여 인접차량과 적정거리를 유지할 수 있어야 하며, 이 때 적용되는 기술로는 Adaptive Cruise Control (ACC)와 Cooperative Adaptive Cruise Control (CACC)가 있다. ACC 차량이 고속도로 유입연결로에서 본선으로 합류(merge)하는 규칙에 대한 연구가 수행되었으며, ACC 시스템 보급률이 100%일 경우 고속도로 연결로 용량이 33%까지 증가한 것으로 분석되었다(Chang and Lai, 1997). Vander Werf et al.(2002)은 일반차량, ACC 및 CACC 장착 차량의 비율을 다양하게 고려하여 고속도로 용량을 추정하였다. CACC는 ACC와 V2V 통신 기술을 접목시킨 시스템으로, CACC가 장착된 차량이 군집주행을 수행할 경우 좁은 차간거리를 유지할 수 있다고 서술하였다(Van Arem et al., 2006). 이에 따라, ACC 차량은 용량을 최대 7% 까지 늘리는 반면에 CACC 차량은 2배까지 용량을 증대시키는 것으로 나타났다. 한편, 도로 이용자의 신뢰성과 안전성을 확보하기 위하여 자율주행 및 군집주행 차량은 V2V 통신 기술이 가능해야 하며, 이러한 기술이 적용될 경우 고속도로 용량이 20-50%까지 증가하는 것으로 제시하였다(Ni et al., 2010). 이와 같은 용량 증대 효과는 교통 혼잡을 상당히 감소시킬 뿐만 아니라 기존 도로를 효율적으로 이용할 수 있을 것으로 판단된다(Tientrakool et al., 2011).
3. 도로 용량 관련 연구
도로 용량은 주어진 도로 조건에서 15분 동안 무리 없이 최대로 통과할 수 있는 승용차 교통량을 1시간 단위로 환산한 값을 의미한다(Ministry of Land, Infrastructure and Transport, 2013). 용량을 결정하는데 있어서 가장 중요한 판단은 합리적으로 기대되는 수치로써 관측된 절대적인 최대 교통량이 아닌 반복적으로 관측될 수 있는 교통류율이다. 이에 근거하여 실제 관측된 교통량의 통계적 분포를 제시하고, 용량 추정 기법을 정립하는 연구가 수행되었다(Kim and Jang, 1995). 임의의 특정 시간대에 단 한번 관측된 최대 통과 교통류율을 도로 용량으로 판단하는 것은 정의상 모호하며 비합리적이라고 서술하였으며, 이를 도로교통용량의 불확실성이라 정의하였다. 평균 차두시간을 Equation 1과 같이 한 시간 단위로 환산하면 교통류율을 산출할 수 있다.
(1)
여기서, q: 교통류율(pcphpl)
h: 평균차두시간(sec)
15분 단위로 관측된 차두간격 분포내의 유의수준 1%, 5%, 10%에 해당되는 차두간격을 제거하였을 때 교통류율에 미치는 영향을 분석한 결과, 신뢰수준이 95%일 경우 최대 통과 교통류율이 2,233pcphpl으로 나타났다. 즉, 도로 용량은 교통류율의 95%에 해당하는 수치로 기존의 2,200대에 도달하여 가장 적합하다고 제시하였다. 또한, 일별 최대 교통류율을 관측일 동안의 내림차순 누적곡선으로 도식화하여 이때 나타나는 변곡점을 용량으로 결정한 연구도 수행되었다(Kim and Seo, 1999). 고속도로 루프 검지기에서 수집된 자료를 이용하여 1분, 5분, 15분, 30분, 60분인 조사단위 시간별 용량분석을 수행한 결과, 조사단위가 15분 일 때 최대 통과 교통류율은 2,267pcphpl으로 나타났다. 이를 내림차순 누적곡선으로 도식화할 때 변곡점은 2,194pcphpl으로 기존의 2,200대에 도달하여 15분 단위로 용량을 추정하였을 때 가장 적절한 것으로 분석되었다.
4. 시사점
자율주행 및 군집주행 효과 관련 문헌 고찰 결과, V2V, ACC, CACC와 같은 자율주행시스템 보급에 따른 용량 증대 효과를 분석한 연구가 다수 수행되었다. 그러나 군집주행 운영 파라미터 조절을 통해 교통류의 성능을 최적화하기 위한 군집 운영전략에 대한 연구는 미흡하였다. 또한, 일반차량과 군집주행 차량이 혼재된 상황에서 다양한 군집주행 시나리오 중 용량 증대 효과가 가장 큰 최적의 군집 운영전략을 도출한 연구는 미비하였다. 따라서 본 연구에서는 교통운영관리 측면에서 고속도로에 화물차 군집주행 도입 시 도로 용량 증대를 위한 실효성 있는 연구가 필요함을 인지하고, 이를 위하여 최적의 군집 운영전략을 제시하였다.
분석방법론
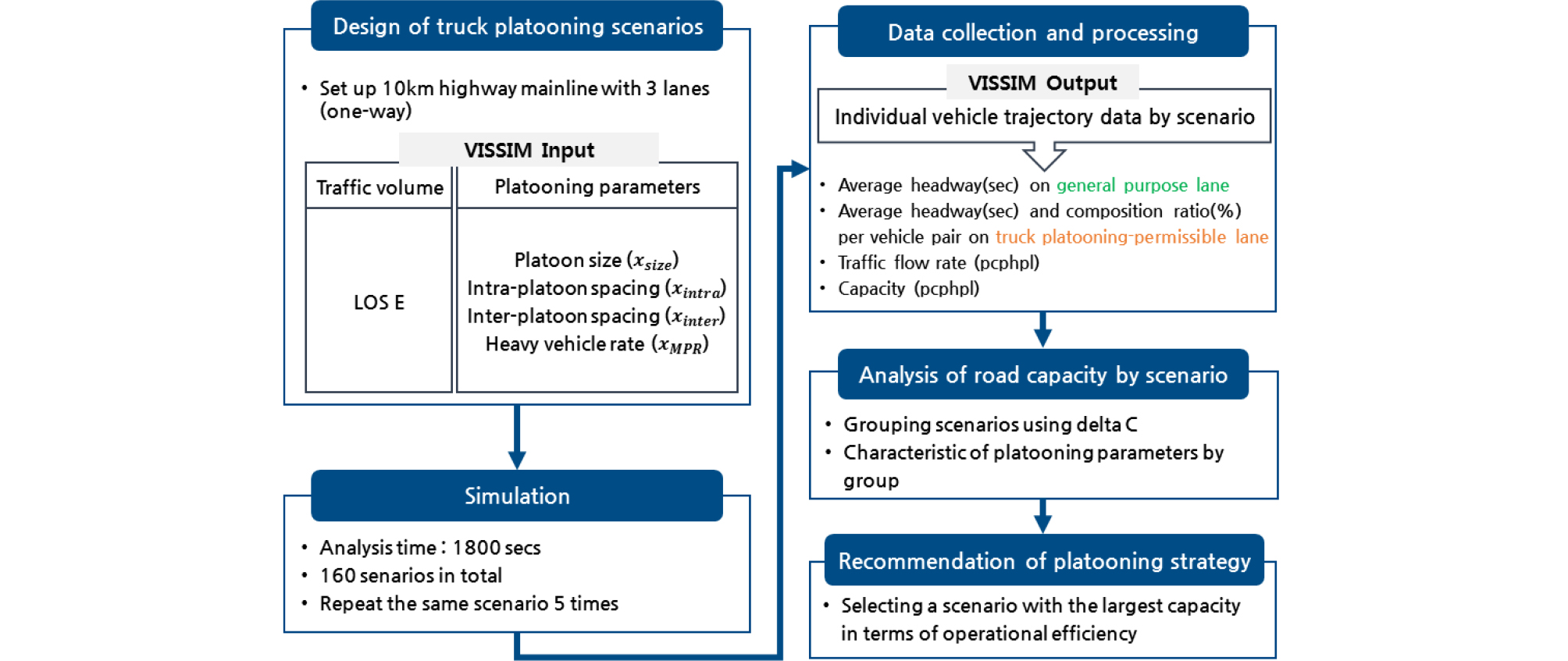
본 연구의 목적은 일반차량과 군집주행차량이 혼재된 상황에서 화물차 군집주행 도입이 도로 용량에 미치는 영향을 분석하는 것이다. 군집주행 운영 파라미터는 다양한 기존의 관련연구에서 정의하였던 군집크기(platoon size), 군집내간격(intra-platoon spacing), 군집간간격(inter-platoon spacing), 군집주행차량비율(market penetration rate, MPR)을 이용하고자 한다(Fritz, 2004; Gehring and Fritz, 1997; Kunze et al., 2011; Robinson et al., 2010; Shaladover, 2010; Tsugawa, 2014). 군집크기는 단일 군집내 차량대수를 의미하며, 군집내간격은 군집주행을 수행하는 개별 차량의 간격으로 정의한다. 군집간간격은 두 군집 사이의 간격이고, MPR은 분석대상 네트워크에서 군집주행을 수행하는 차량의 구성비를 의미한다. 이와 같은 군집주행 운영 파라미터를 조합하여 용량 증대 효과가 가장 큰 적정 파라미터를 제시하고, 미시교통류시뮬레이션 VISSIM을 이용하여 화물차 군집주행 운영 로직을 구현하였다. 본 연구의 수행과정은 Figure 1과 같다.
1. 군집주행 시뮬레이션 구현
1) 분석 네트워크 설정
본 연구에서는 화물차 군집주행 도입에 따른 용량을 추정하기 위하여 직선 ‧ 평지로 구성된 편도 3차로인 10km 구간에 대해 가상의 네트워크를 구축하였다. 시뮬레이션을 이용하여 고속도로 용량 산정 시 구간 길이를 10km로 설정하여 1km당 용량을 산정한 연구를 기반으로 분석 네트워크를 설정하였다(Lee et al., 2013). 분석 대상 구간의 용량을 산정하는데 있어서 차로폭 및 측방여유폭에 대한 보정계수는 기본조건인 차로폭 3.5m 이상과 측방여유폭 1.5m 이상을 만족하였다. 또한, 고속도로 기본 구간에서 종단경사, 평면선형 및 종단선형에 영향을 받지 않는 일반지형에 대한 승용차 환산계수는 소형화물차 1.0, 중형화물차 1.5, 대형화물차 2.0이다. 각 중차량의 구성비와 승용차 환산계수를 고려하여 중차량 보정계수를 산출하였으며(Ministry of Land, Infrastructure and Transport, 2013), 이를 이용하여 시뮬레이션의 입력 교통량을 산정하였다.
한편, 도로교통법 시행규칙 제39조 ‘고속도로에서의 차로에 따른 통행구분’에 의하면 편도 2차로 고속도로의 경우 1차로는 앞지르기 차로, 2차로는 모든 자동차의 주행차로로 군집주행을 수행하기에 적합하지 않은 것으로 판단된다. 편도 3차로인 고속도로인 경우, 3차로는 화물자동차, 특수자동차 및 건설기계의 주행차로로 군집주행을 수행하는 화물차량은 최 우측 차로로 주행하도록 설정하였다. 따라서 1차로와 2차로는 일반차로(general purpose lane)로 군집차량이 주행할 수 없으며, 3차로는 군집주행가능차로(truck platooning permissible lane)로 군집차량과 일반차량이 혼재되어 주행할 수 있다.
2) 군집주행 시나리오 설계
VISSIM을 이용하여 군집차량군을 한 차종으로 설정하고 차량 모델을 새롭게 형성하여 구현하였다. 대형화물차는 모두 군집주행을 수행하며 형성된 군집내 일반차량이 주행할 수 없다고 가정하였으며, 군집차량 길이는 현대 엑시언트 10x4 카고 트럭의 전장인 12.8m을 이용하였다. 군집주행 운영 파라미터 중 군집크기는 2대, 3대, 4대, 5대로 적용하였으며, 군집내간격은 4m, 6m, 8m, 10m로 설정하였다. 군집크기와 군집내간격은 화물차 군집주행 프로젝트에서 설정한 범위를 고려하였으며, 이를 조합하였을 때 총 16개의 군집차량군이 형성된다. 군집크기와 군집내간격에 따른 군집차량군은 Figure 2에 도식화하였다. 군집간간격은 기존문헌의 범위(Gouy et al., 2014)와 100km/h로 주행할 때의 안전거리를 고려하여 50m와 100m로 설정하였다. 군집차량에 대해 군집간간격이 100m일 경우 headway는 3.1초, 50m일 경우 headway는 1.3초와 같다. 군집주행차량비율(MPR)은 교통량 정보제공 시스템에서 제시하는 2016년 화물차 평균 일교통량에 대한 구성비 26.4% 이하의 값을 참고하여 5%, 10%, 15%, 20%, 25%로 설정하였다. 군집주행 운영 파라미터별 조합을 통해 총 160개의 시나리오를 설계하였으며, 세부항목은 Table 1과 같다. 시뮬레이션 수행 시 동일 시나리오는 random seed를 다르게 적용하여 5번 반복 수행하였고, 시뮬레이션 시간은 총 2200초로 warm-up time 400초를 제외하면 분석시간은 1800초이다. Warm-up time은 분석 네트워크에 교통량이 고르게 분포된 이후에 분석을 수행하기 위하여 설정하였다.
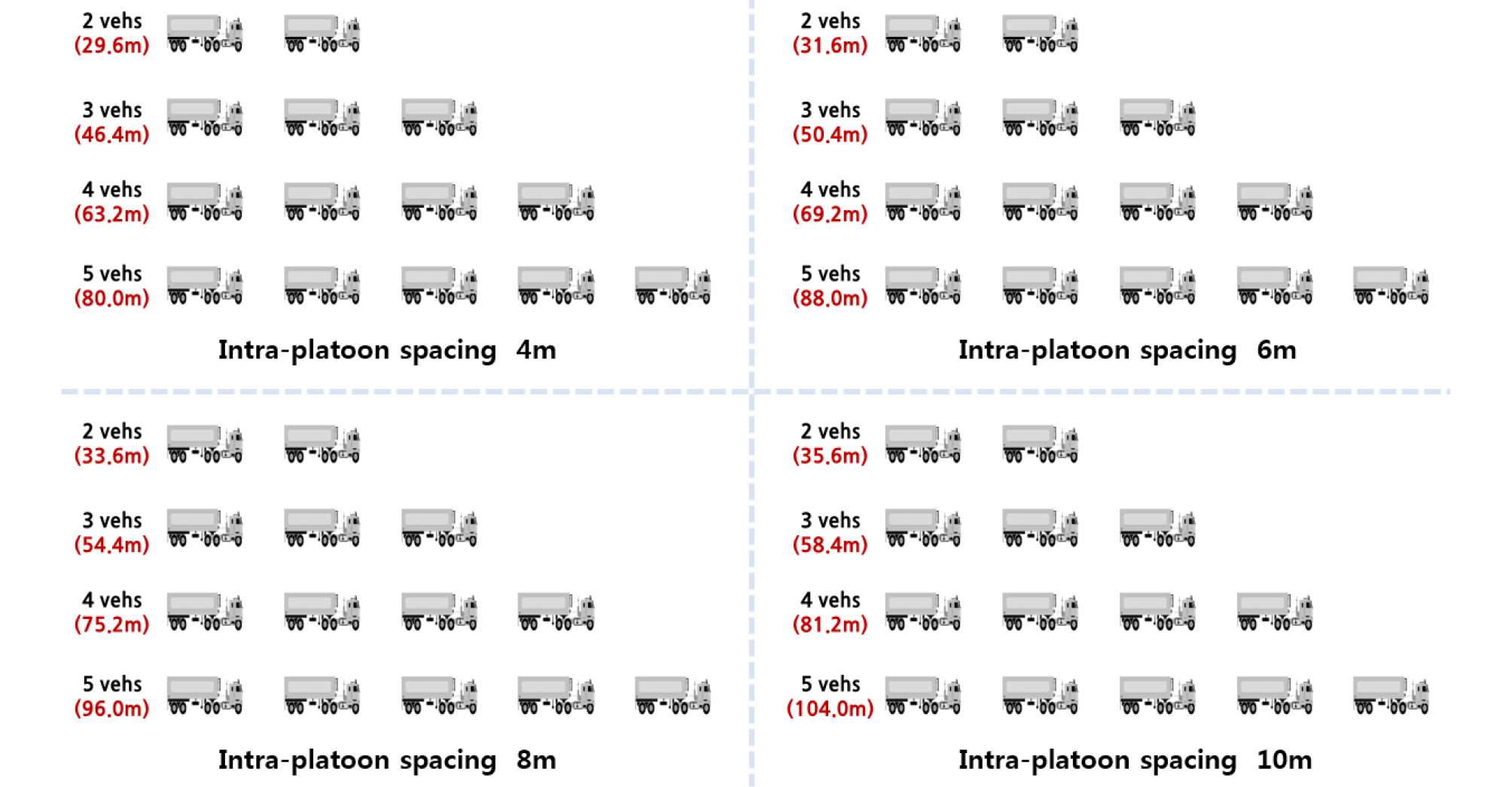
Table 1. Details of truck platooning operational parameters
2. 화물차 군집주행을 고려한 용량 추정
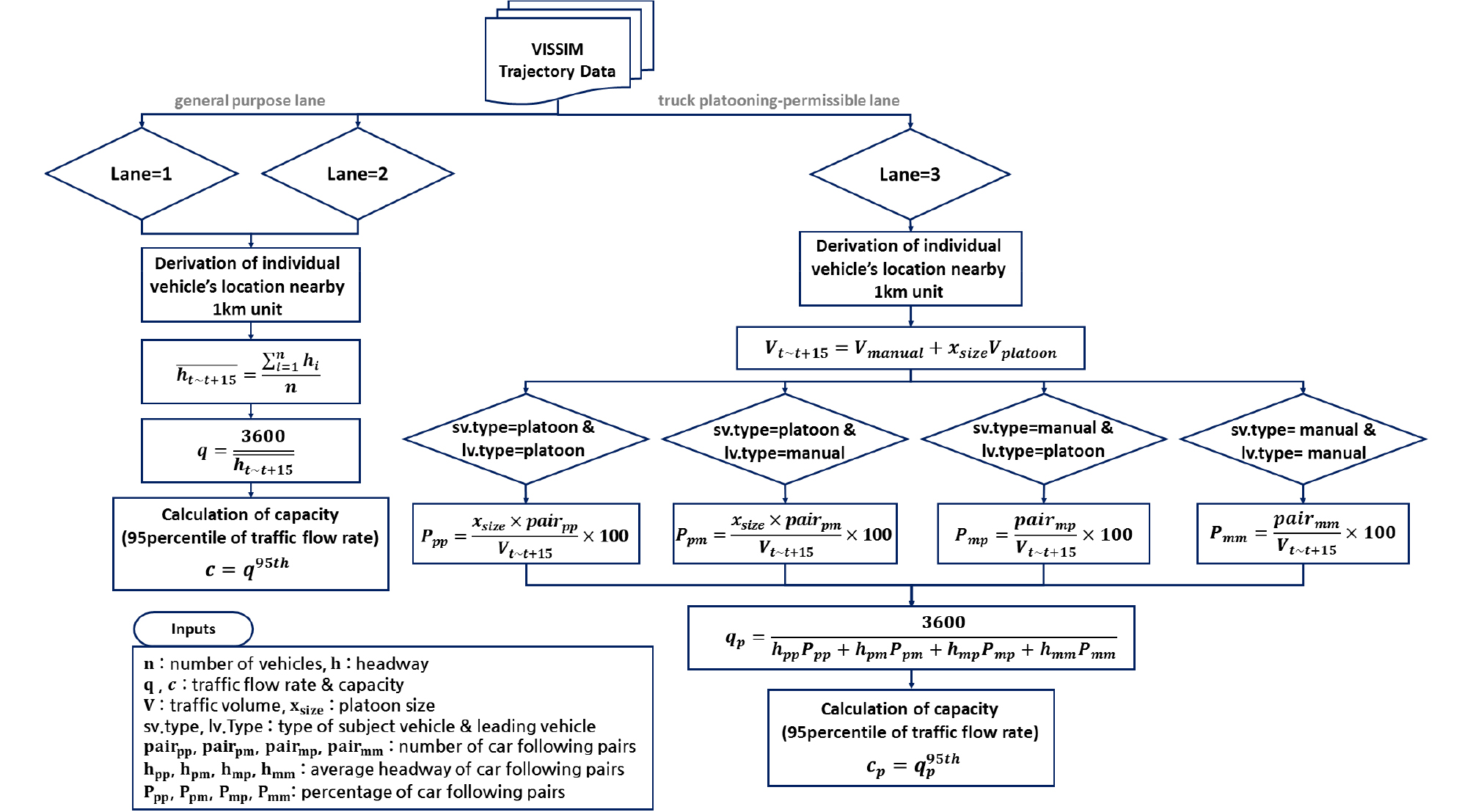
서비스수준(Level of service, LOS)이란 통행속도, 통행시간, 통행자유도, 안락감 그리고 교통안전 등 도로의 운행 상태를 설명하는 개념이다. 수준은 A-F까지 6등급으로 나눌 수 있으며, A수준은 가장 좋은 상태, F수준은 가장 나쁜 상태를 나타낸다. 일반적으로 E수준과 F수준의 경계는 용량이 된다(Ministry of Land, Infrastructure and Transport, 2013). 따라서 본 연구에서는 LOS E 수준에 대해 군집주행 환경에서 차로별 용량을 추정하고자 한다. 시뮬레이션 분석시간 30분(1800초)에 대해 0을 기준으로 1분씩 증가시켜 조사시간 단위인 15분 동안의 평균 차두시간을 산출하고, 이를 1시간 단위로 환산하여 교통류율을 산정하였다. 산정된 교통류율의 95번째 백분위수(percentile) 교통류율을 용량으로 정의하였다(Kim and Jang, 1995). 1차로와 2차로는 일반차로로 군집차량이 주행할 수 없기 때문에 일반차량의 평균 차두시간을 이용하여 Equation 2와 같이 용량을 산정하였다.
(2)
여기서, q: 교통류율(pcphpl)
: t에서 t+15 동안의 평균차두시간(sec)
C: 용량(pcphpl)
q95th: 95percentile 교통류율(pcphpl)
한편, 군집차량과 일반차량이 혼재된 군집주행 가능차로의 용량은 군집차량 비율에 따라 달라질 것으로 판단된다. Yokota(1998)는 ACC 차량 비율에 따른 용량 추정 모델을 제시하였으며 Equation 3과 같다.
(3)
여기서, Q: 용량(pcphpl)
hACC: ACC 차량 목표 차두시간(0.5sec)
hmanual: 일반차량 차두시간(sec)
PACC: ACC 차량 점유율(%)
여기서, Q는 ACC 차량의 점유율이 PACC(%)일 때 용량(pcphpl)이며, hACC와 hmanual은 각각 ACC 차량과 일반차량의 차두시간(sec)으로 설정하였다. 본 연구에서는 Equation 3을 참고하여 선행차량과 후행차량의 차종을 고려한 군집주행가능차로의 용량을 Equation 4로 산정하였다.
(4)
여기서, qp: 군집주행가능차로 교통류율(pcphpl)
hpp, hpm, hmp, hmm: Car following pair에 따른 차두시간(sec)
Ppp, Ppm, Pmp, Pmm: Car following pair에 따른 구성비(%)
Cp: 군집주행가능차로 용량(pcphpl)
: 군집주행가능차로 95percentile 교통류율(pcphpl)
여기서, qp와 Cp는 화물차 군집주행 도입에 따른 군집주행가능차로의 교통류율 및 용량(pcphpl)이다. h와 P는 선행차량과 후행차량의 차종에 따른 평균 차두시간(sec)과 구성비(%)이다. 아래 첨자는 군집과 군집(platoon-platoon), 군집과 일반(platoon-manual), 일반과 군집(manual-platoon), 일반과 일반(manual-manual)차량에 대한 car following pair를 나타낸다. 군집주행가능차로의 car following pair별 구성비는 Equation 5를 이용하여 도출하였으며, 차로별 용량을 추정하는 과정은 Figure 3에 제시하였다.
(5-1)
(5-2)
(5-3)
(5-4)
여기서, Ppp, Ppm, Pmp, Pmm: Car following pair 구성비(%)
pairpp, pairpm, pairmp, pairmm: Car following pair 수
xsize: 군집크기
Vt-t+15c: t에서 t+15 동안 통과교통량(veh/15min)
분석 결과
1. 화물차 군집주행 시행 전후 비교
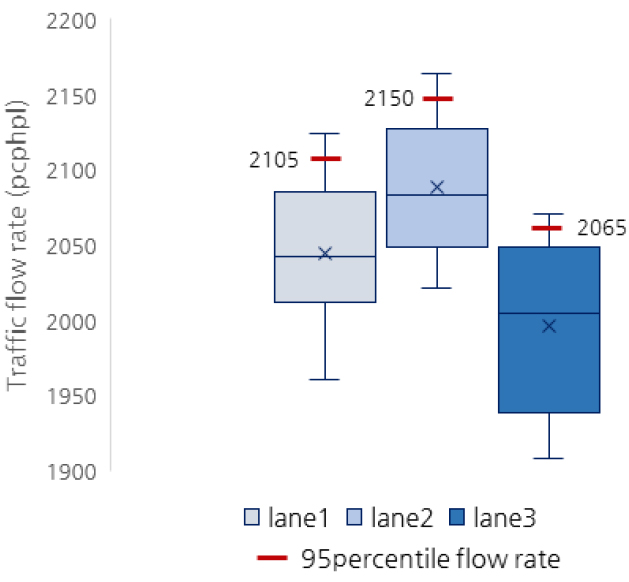
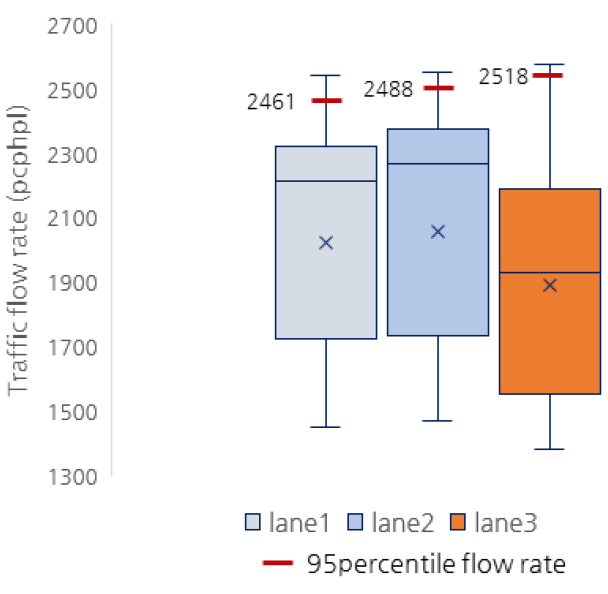
본 연구에서는 VISSIM을 이용하여 동일한 분석 네트워크에서 화물차 군집주행 시행 전후에 대한 시뮬레이션을 수행하였다. 화물차 군집주행 미시행 시 용량은 15분 동안 통과한 차량들의 평균 차두시간을 1시간 단위로 환산한 교통류율의 95percentile을 이용하여 산정하였다. 즉, 군집주행 환경에서 일반차로의 용량 산정 방법과 동일하게 군집주행 미시행 시 차로별 용량을 도출하였다. 차종별 구성비는 교통량 정보제공 시스템에서 제시하는 2016년도 고속도로 평균 일교통량에 대한 구성비로 승용차 70.5%, 버스 3.1%, 화물차 26.4%를 적용하였다. 버스 및 화물차의 승용차 환산계수는 도로용량편람에 근거하여 1.5를 적용하였으며(Ministry of Land, Infrastructure and Transport, 2013), LOS E를 기준으로 승용차 4,653대, 버스 137대, 화물차 1,161대를 시뮬레이션의 입력 교통량으로 설정하였다. 또한, 모든 차량의 주행속도는 100km/h로 설정하였으나 차로별 평균 주행속도는 1차로 82.5km/h, 2차로 85.4km/h, 3차로 78.7km/h로 나타났다. 분석결과, 화물차 군집주행 시행 전 용량은 1차로 2,105pcphpl, 2차로 2,150pcphpl, 3차로 2,065pcphpl으로 나타났다. 한편, 총 160개의 화물차 군집주행 시나리오를 고려한 용량은 1차로 2,461pcphpl, 2차로 2,488pcphpl로 나타났으며, 군집주행가능차로인 3차로는 2,518pcphpl으로 도출되었다. 군집주행가능차로 뿐만 아니라 일반차로의 용량도 증가하였는데, 이는 군집주행을 수행하는 대형차량이 최 우측차로로 주행함으로써 일반차로의 통과교통량이 증대된 것으로 판단된다. 화물차 군집주행 시행 전후에 대한 차로별 교통류율의 95percentile, 평균, 표준편차를 Table 2에 제시하였다.
Table 2. Comparison of traffic flow rate by lanes
| Without platoon | With platoon | |||||
 |  | |||||
| Lane 1 | Lane 2 | Lane 3 | Lane 1 | Lane 2 | Lane 3 | |
| 95percentile | 2,105 | 2,150 | 2,065 | 2,461 | 2,488 | 2,518 |
| Average | 2,045 | 2,088 | 1,997 | 2,293 | 2,340 | 2,194 |
| Standard deviation | 40.87 | 40.96 | 51.98 | 148.90 | 159.25 | 168.30 |
차로별 교통류율의 표준편차는 군집주행 시행 시 증가하는 것으로 나타났으며, 이는 군집주행 파라미터 중 군집간간격이 교통류율에 영향을 미치는 것으로 판단된다. 군집간간격을 headway로 환산하였을 경우 100m는 3.1초, 50m는 1.3초이며, LOS E 수준에서 차량의 headway인 1.6초 보다 작을 경우 통과교통량이 증대될 가능성이 있다. 군집간간격을 50m로 설정한 시나리오의 차로별 평균 교통류율은 1차로 2,324pcphpl, 2차로 2,375pcphpl, 3차로 2,181pcphpl으로 나타났다. 한편, 군집간간격을 100m로 설정한 시나리오의 차로별 평균 교통류율은 1차로 1,712 pcphpl, 2차로 1,736pcphpl, 3차로 1,595pcphpl으로 분석되었다. 따라서 군집간간격의 변화가 교통류율의 표준편차를 증가시킨 것으로 판단된다.
2. 군집주행 시나리오 그룹별 운영 파라미터 특성 분석
군집주행 환경에서 도로용량에 영향을 미치는 군집주행 운영 파라미터의 특성을 분석하기 위하여, 시나리오별 그룹화를 수행하였다. 군집주행가능차로를 대상으로 용량을 내림차순 정렬하고, 용량의 변화량(△C; delta C)을 Equation 6을 이용하여 산정하였다. 용량의 변화량이 클 경우 이를 기준으로 시나리오를 그룹화 하였으며, Figure 4에 제시하였다.
(6)
여기서, 𝛥C: 용량의 변화량
Ck: 군집주행가능차로의 k번째 용량
Ck+1: 군집주행가능차로의 k+1번째 용량
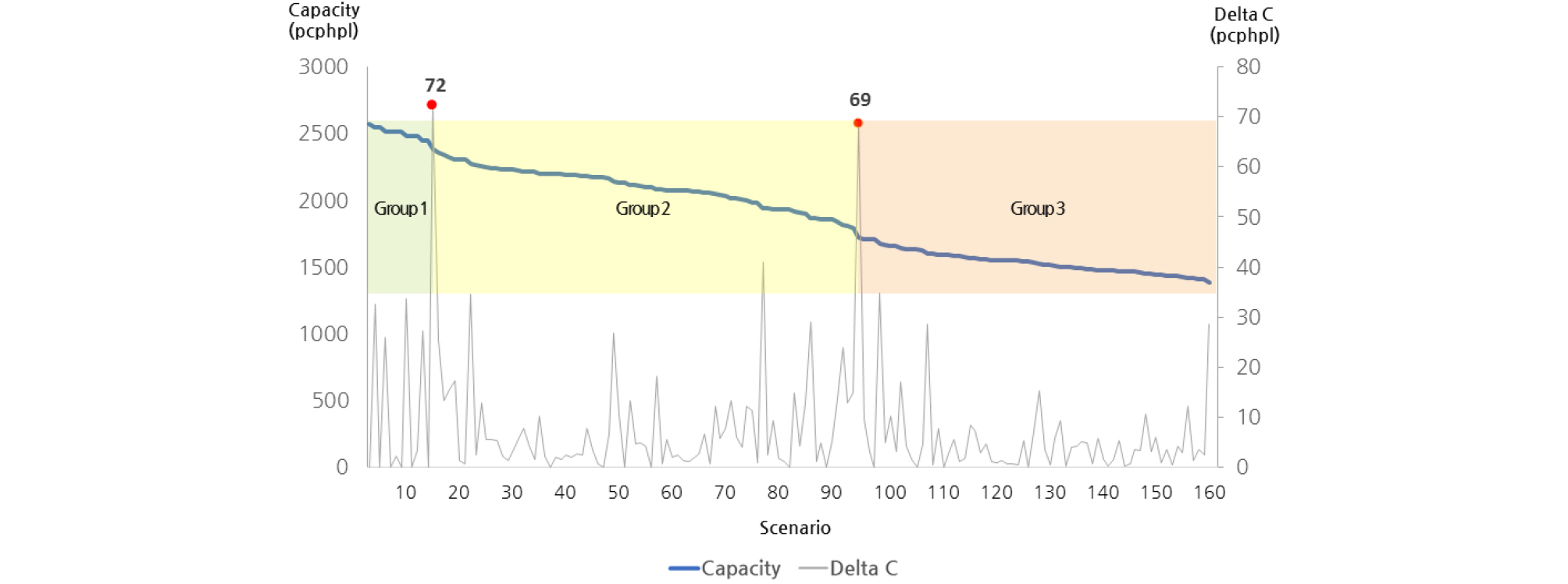
용량 변화량이 가장 큰 두 지점인 72pcphpl과 69pcphpl을 기준으로, 160개의 군집주행 시나리오를 3개의 그룹으로 나누었다. Group 1은 12개, Group 2는 80개, 그리고 Group 3은 68개의 시나리오로 구성되었으며, 그룹간 용량의 통계적인 차이를 검증하기 위하여 분산분석을 수행하였다. 분석결과, 용량은 95% 신뢰수준에서 통계적으로 유의한 차이(p<0.05)가 있는 것으로 나타났으며 Table 3에 제시하였다. 그룹별 평균 용량은 각각 2,506pcphpl, 2,097pcphpl, 1,536pcphpl으로 그룹간 용량의 차이가 존재하는 것으로 분석되었다.
Table 3. Capacity on truck platooning-permissible lane of ANOVA
군집주행가능차로의 용량을 기준으로 그룹별 군집주행 운영 파라미터의 특성은 Table 4에 제시하였다. 용량 증대 효과가 가장 큰 Group 1은 다른 그룹에 비해 군집크기가 작고, 군집내간격과 군집간간격이 짧으며, MPR이 높은 시나리오인 것으로 분석되었다. 반면에 Group 3은 군집크기가 크고, 군집내간격과 군집간간격이 길며, MPR이 상대적으로 낮은 시나리오로 나타났다. 모든 차량이 군집주행을 수행할 경우, 즉 MPR이 100%일 때 군집크기가 커질수록 용량이 증대될 것으로 예상되나, 본 연구와 같이 일반차량과 군집차량이 혼재된 상황에서는 군집크기가 작을수록 용량 증대 효과가 있는 것으로 판단된다. 그룹간 군집주행 파라미터의 통계적 차이를 검증하기 위하여 분산분석을 수행하였다. 분석결과, 군집크기, 군집내간격, 군집간간격의 유의확률은 0.075, 0.012, 0.000으로 90%의 신뢰수준에서 통계적으로 유의한 차이가 있는 것으로 나타났다. 반면에 MPR에 대한 그룹간 유의확률은 0.696 (p>0.1)으로 통계적으로 차이가 없는 것으로 도출되었다. 이를 통해 군집주행을 수행하는 대형화물차 비율이 25% 이하일 경우 MPR 변화에 따른 용량의 큰 차이가 없으며, MPR을 제외한 군집주행 파라미터는 용량 증감에 영향을 미칠 것으로 예상된다. 운영효율성 측면에서 용량 증대를 가능하게 하는 효과적인 군집 운영전략 수립이 필요할 것으로 판단된다.
Table 4. Characteristics of platooning operation parameters by groups
3. 용량 증대를 최대로 하는 군집 운영전략
본 연구에서는 일반차량과 군집차량이 혼재된 상황에서 교통류의 운영효율성을 나타내는 지표로 용량을 산정하였다. 일반차로와 군집주행가능차로 모두 용량 증대가 가능하도록 군집 운영전략을 수립할 필요가 있다. 이는 화물차 군집주행이 도입된 고속도로 구간 및 노선에 있어서 교통류를 원활하게 유지할 것으로 판단된다. 화물차 군집주행 시행 시 일반차로 및 군집주행가능차로의 용량이 가장 크게 증가한 상위 10개 시나리오는 Table 5에 제시하였으며, 각 시나리오의 평균 도로 용량은 2,400pcphpl 이상으로 나타났다. 용량 증대를 최대로 하는 군집 운영전략은 군집크기가 2대, 군집내간격이 10m, 군집간간격이 50m, MPR이 10%인 경우로, 차로별 용량은 각각 2,543pcphpl, 2,552pcphpl, 2,353pcphpl으로 도출되었다. 이는 군집주행 미시행 시 용량 대비 약 17.8% 증가한 것으로 분석되었다. 또한, 군집크기가 5대, 군집내간격이 8m, 군집간간격이 50m, MPR이 10%인 시나리오의 차로별 용량은 각각 2,426pcphpl, 2,522pcphpl, 2,255pcphpl으로, 군집주행 미시행 시 용량 대비 약 14.0% 증가하였다. 우선순위 1과 우선순위 10의 평균 도로 용량 차이는 82pcphpl으로, 우선순위 1-10에 해당하는 군집 운영전략을 적용할 경우 고속도로의 교통 운영효율성이 향상될 것으로 기대된다.
Table 5. Result of 10scenarios with the largest increase in capacity per lane
한편, 군집주행을 수행하는 대형화물차 비율에 따라 적정 군집크기, 군집내간격, 군집간간격을 다르게 설정하여 최적의 군집 운영전략을 결정할 필요가 있다. 예를 들어, 군집주행 서비스를 장착한 대형화물차 비율이 25%일 경우, Table 5에 따라 군집크기 2대, 군집내간격 6m, 군집간간격 50m로 군집을 형성하는 것이 본선의 용량을 증대시킬 것으로 예상된다. 군집주행의 주체가 되는 운송실무자 입장에서는 운송효율을 높이기 위하여 군집크기를 최대로 형성하려고 할 것이다. 교통 운영관리자는 물류 업체에서 요구하는 군집크기를 고려하여 교통 운영효율성을 향상시킬 수 있는 최적의 군집 운영전략을 결정함과 동시에 운송효율성도 증진시킬 것으로 기대된다.
또한 차로변경을 수행하고자 하는 일반차량이 군집차량과 혼재된 상황에서는 군집크기가 차로변경, 유입, 유출에 제약 및 영향을 주기 때문에 적절한 군집 운영 방안의 수립이 필요할 것으로 판단된다(Lee and Oh, 2018). 군집크기 뿐만 아니라 군집내간격, 군집간간격을 제어함으로써 도로 용량을 증대시키는 군집주행 운영 파라미터 특성이 함께 고려된다면 더욱 효과적일 것으로 기대된다.
결론 및 향후 연구과제
V2X 통신 기반의 자율주행시스템은 주변의 차량뿐만 아니라 도로 인프라와 끊임없이 주행 정보를 주고받으며 군집주행 서비스가 가능할 것으로 판단된다. 자율주행 서비스 중 하나인 군집주행은 2대 이상의 차량이 줄지어 주행하는 방식으로 교통 운영효율성, 안전성, 환경성을 향상시키는 것을 목적으로 한다. 화물차 군집주행 프로젝트 중 EU의 KONVOI project는 도로부문의 화물 수송량 증가 및 도로용량 증대를 목적으로 수행되었다. 화물차 군집주행은 국가 물류비 절감과 동시에 화물운송 경쟁력을 갖추기 위하여 매우 효과적인 전략이 될 것으로 기대된다. 한편, 용량은 일반적으로 고속도로의 계획, 설계 그리고 운영하는데 중요한 역할을 담당하고 도로 및 시설의 운영 상태를 평가하고 판단하는데 중요한 지표로 활용된다(Doh, 2007). 따라서 본 연구에서는 교통운영관리 측면에서 고속도로에 도입되는 화물차 군집주행이 도로 용량에 미치는 영향 분석을 수행하고, 용량 증대를 최대로 하는 군집 운영전략을 제시하였다.
미시교통류시뮬레이션 VISSIM을 이용하여 일반차량과 군집차량이 혼재된 군집주행 환경에서 고속도로 차로별 용량에 미치는 영향 분석을 수행하였다. 분석 대상 구간은 직선 ‧ 평지로 구성된 편도 3차로인 10km 구간에 대해 가상의 네트워크를 구축하였다. 군집주행을 구현하기 위하여 군집차량군을 한 차종으로 설정하고 차량 모델을 새롭게 형성하였다. 군집주행 운영 파라미터 중 군집크기는 2대, 3대, 4대, 5대로 적용하였으며, 군집내간격은 4m, 6m, 8m, 10m로 설정하였다. 군집간간격은 50m와 100m, MPR은 5%, 10%, 15%, 20%, 25%로 설정하였으며, 총 160개의 시나리오를 선정하였다. 각 시나리오별 15분 동안 통과한 차량들의 평균 차두시간을 산출하고, 이를 1시간 단위로 환산하여 교통류율을 산정하였다. 산정된 교통류율의 95번째 백분위수 교통류율을 용량으로 정의하였다. 군집주행가능차로의 용량 추정은 선행차량과 후행차량의 차종에 따른 구성비와 차두시간을 고려하여 용량을 추정하였다.
분석결과, 총 160개의 군집주행 시나리오에 대해 차로별 용량은 1차로 2,461pcphpl, 2차로 2,488pcphpl, 3차로 2,518pcphpl으로 나타났다. 군집주행 미시행 시 차로별 용량은 앞서 설정한 동일한 분석 네트워크에 대해 산정하였으며 1차로 2,105pcphpl, 2차로 2,150pcphpl, 3차로 2,065pcphpl으로 나타났다. 군집주행가능차로에서 용량 변화량이 가장 큰 값을 기준으로, 160개의 군집주행 시나리오를 3개의 그룹으로 나누었다. 용량 증대 효과가 가장 큰 Group 1은 다른 그룹에 비해 군집크기가 작고, 군집내간격과 군집간간격이 짧으며, MPR이 높은 시나리오인 것으로 분석되었다. 최종적으로 군집주행 시행 시 차로별 용량이 가장 크게 증가한 시나리오는 군집크기가 2대, 군집내간격이 10m, 군집간간격이 50m, MPR이 10%인 경우로 기존 용량 대비 약 17.8% 증가하여 고속도로의 교통 운영효율성이 향상될 것으로 기대된다. 본 연구에서는 고속도로 평균 일교통량에 대한 화물차 구성비(26.4%)를 고려하여 화물차 군집주행 운영전략을 수립하였으며, 대형화물차 비율에 따라 용량 증대효과가 있는 적정 군집 운영전략을 제시하는데 의의가 있다.
본 연구에서 제시한 군집차량과 일반차량이 혼재된 군집주행 환경에서 용량 추정에 대한 신뢰도를 높이기 위해서는 다음과 같은 추가적인 연구가 필요하다. 첫째, 가상의 분석 네트워크가 아닌 실제 도로기하구조를 반영한 용량 추정 결과를 제시해야 할 필요성이 있다. 예를 들어, 대형화물차 통행량이 많은 고속도로 구간에 대해 실제 교통량과 기하구조를 고려하여 화물차 군집주행이 도로 용량에 미치는 분석을 수행해야 한다. 둘째, 구체적인 화물차 군집주행 교통운영관리 전략을 마련하기 위해서는 고속도로 연결로 및 진출입 구간, 차로수 및 도로기하구조 변화와 같은 다양한 도로 조건을 고려한 연구가 수행되어야 한다. 특히 고속도로 연결로 접속부는 본선보다 많은 차로변경이 발생하여 전체적으로 불안정한 교통류를 형성한다. 화물차 군집주행이 연결로 영향권 내에서 발생시킬 수 있는 여러 상황을 고려하고, 용량 증대 효과가 가장 큰 군집운영전략을 마련해야 할 것이다. 또한 다양한 군집주행 환경에서 일반차량의 주행여건에 영향을 미치지 않는 범위 내에서 최적의 군집주행 운영 파라미터를 도출해야 할 것이다. 셋째, 화물차 군집주행의 용량 증대 효과에 따른 경제성 분석을 수행해야 한다. 화물차 군집주행은 국가 물류비 중 수송비를 상당히 줄일 수 있을 것으로 판단되며, 원활한 교통류를 유지시킴으로써 통행시간이 줄어들 것으로 기대된다. 화물차 군집주행이 고속도로 네트워크 전체 또는 특정 구간에 도입 시 용량 증대에 따른 편익산정이 추가적으로 수행되어야 한다. 마지막으로 군집주행이 가능한 최소요구조건을 마련하여, 이를 만족하는 시나리오 중 용량 증대 효과가 가장 큰 시나리오를 최적안으로 선정하는 연구가 수행되어야 할 것이다. 최소요구조건 설정 시 용량 외에 교통 안전성 및 운영효율성, 시스템 구현가능성, 경제성 등의 factor를 고려하여 군집주행 운영 파라미터의 체계적인 선정이 요구된다. 또한, 안전성과 운영효율성이 trade-off인 관계임을 고려한다면 여러 교통 지표를 대상으로 화물차 군집주행의 효과 분석을 수행하고 이에 대한 검토가 필요하다.
본 연구에서 제시한 군집주행 환경에서 고속도로 차로별 용량 추정 방법론은 선행차량과 후행차량의 차종에 다른 car following pair를 고려함으로써, 일반차량과 혼재된 차로의 교통류 특성을 반영하여 분석의 신뢰도를 향상시킬 것으로 판단된다. 본 연구의 결과는 교통 운영자 및 관리자에게 용량 증대 효과가 가장 큰 최적의 군집주행 운영 파라미터를 제시함으로써 교통운영관리 전략을 제안하는데 의의가 있다. 앞서 언급한 향후 연구내용에 대한 체계적인 분석을 통해 실질적으로 적용 가능한 결과도출을 위해 다각적인 노력이 필요할 것이다.
