

서론
기존 문헌 고찰
1. 자율주행환경 및 Adaptive Cruise Control 관련 연구
2. Jerk 분석 관련 연구
3. 기존 연구와의 차별성
분석방법론
1. 영상기반 인지특성 조사
2. 주행 시뮬레이션 실험
분석결과
1. 영상기반 인지특성 조사
2. 주행 시뮬레이션 실험
결론
서론
차량 센서 및 제어기술, 무선통신기술의 진화는 자율주행환경의 실현을 가속화 시키고 있다. 자율주행차량이란 인식, 판단 및 제어를 자동으로 수행하며 주행하는 자동차를 일컬으며 교통사고 예방, 교통 혼잡 감소, 연비절감 및 환경개선 등의 측면에서 유용할 것으로 기대된다. 자율주행차량의 핵심기술인 주변환경 인식, 차량 측위, 판단 및 제어기술을 활용한 첨단운전자지원시스템(ADAS)의 발전을 통해 자율주행시대가 현실화되고 있다.
Adaptive Cruise Control (ACC)는 첨단운전자지원시스템의 핵심기술로 종방향 자율주행 환경에서 설정조건에 따라 선행차량을 감지한 후 선행차량의 속도에 따라 자동적으로 가감속하여 안전거리를 유지하고 목표속도로 주행 하도록 보조하는 종방향 운전자 지원시스템이다. Moon et al.(2009)은 종방향 운전자 지원시스템에 대한 3개의 알고리즘을 제시하였다. 3가지의 알고리즘은 전방차량과의 안전거리 개념의 시스템 운영파라미터인 Warning Index (WI)와 inverse Time to Collision (TTC)을 고려하여 결정되며, 파라미터의 임계값에 따라 시스템의 제어방식이 결정된다. 이 두 가지 파라미터는 모두 선행차량과 후행차량 간 거리와 상대속도에 의해 산출된다.
이처럼 현재 ACC 운영알고리즘은 선행차량과 후행차량 간 관계를 기반으로 설계되지만 ACC 운영에 있어 중요한 이슈 중 하나는 운전자의 ACC 운영에 대한 신뢰도, 즉 ACC를 믿고 차량의 주행 보조를 맡길 수 있는 가에 대한 것이다. 따라서 운전자의 인지특성을 반영한 ACC 운영파라미터를 적용한 알고리즘이 요구된다. 본 연구에서는 운전자의 인지특성을 반영하지 못하는 ACC 운영은 운전자의 잦은 개입을 유발하며 주행안정성 저하를 초래할 수 있으므로 ACC 운영 파라미터 설계 시 적정수준의 운전자 안락감(Driving Comfort)고려의 필요성을 제시하였다. 또한 차량의 주행행태가 불안정할수록 가속도의 단위시간 당 변화량인 Jerk가 크게 변화하며, 이는 운전자가 체감하는 안락감이 저하되는 것으로 판단할 수 있다. 운전자의 안락감과 차량의 개별차량의 주행안정성 저하는 주변차량과의 관계에 부정적인 영향을 미치며 주변차량과의 안전성 및 전체 교통류의 안전성을 저하시킬 수 있다. 따라서 Jerk의 변화는 선행차량과의 추종관계에서 안전성 저하를 유발하며 상충 및 사고 개연성을 증가시킬 수 있으며, 본 연구에서는 Jerk를 통해 종방향 자율주행 환경에서 운전자의 안락감 및 주행안정성 분석을 수행하였다.
본 연구에서는 설정된 TTC임계값에 따라 ACC구현이 가능한 주행 시뮬레이터를 이용해 영상기반 조사와 주행 시뮬레이션 실험을 진행하였다. 먼저 영상기반 조사를 통해 TTC임계값에 대한 피실험자의 주관적 위험도와 주행개입 의지를 분석하여 운전자의 인지특성을 반영한 TTC임계값을 도출하였고, 도출된 임계값을 적용하여 주행 시뮬레이션을 수행하였다. 주행 시뮬레이션 실험에서 선행차량의 급감속을 유도하여 후방의 ACC차량 운전자에게 주행 중 압박을 가하였으며, 이 때 자유의지에 의해 ACC를 작동하도록 하여 운전자의 주행 중 개입이 가능하도록 하였다.
주행 시뮬레이션 실험 데이터를 활용하여 주행 중 개입한 운전자들의 주행특성을 분석하였으며 Jerk분석을 통해 차량의 주행안정성을 평가하였다. 또한 선행차량과의 차간거리와 상대속도에 대한 변수인 TTC에 대해 ACC차량 운전자의 입장에서 고찰하고, 운전자의 주관적 개입특성을 반영한 선행차량과의 차간거리를 도출하였다. 본 연구 결과를 통해 ACC 운영 파라미터를 결정하는 데에 있어 TTC와 운전자의 인지특성이 중요함을 확인하였다. 또한 운전자의 개입의지를 최소로 하는 운전자 친화적인 ACC시스템을 설계하고 개발하는 데 본 연구의 분석결과가 유용하게 활용될 것으로 기대된다.
기존 문헌 고찰
본 연구의 문헌 검토는 자율주행환경의 첨단운전자보조시스템 및 ACC 관련 연구와 Jerk 분석 관련 연구를 대상으로 실시하였다. 문헌 조사를 통해 시뮬레이션을 통한 ACC구현 및 평가 방법론을 고찰하였다. 또한 Jerk분석을 통한 감속 및 위험상황 평가 방법론을 고찰하였다.
1. 자율주행환경 및 Adaptive Cruise Control 관련 연구
Adaptive Cruise Control (ACC)는 운전자에게 고속도로 주행 중 차량의 종방향 제어행태를 보조하며 선행차량과 원하는 시간간격을 유지하도록 하는 시스템이며, Marsden et al.(2001)는 ACC를 이용하는 것이 비자율차량 운전과 비교하여 가속도를 상당히 변화시킬 수 있다고 제시하였다. ACC를 이용한 주행행태 분석에서(De Winter et al., 2014), ACC 구현이 가능한 차량은 비자율차량과 비교하여 더 빠른 속도, 더 짧은 차두시간간격에 대해 수월하게 적응할 수 있음을 제시하였다. 또한 첨단운전자보조시스템 관련 주행 시뮬레이션 실험 결과 대부분의 운전자들은 ACC시스템을 매우 긍정적으로 평가하였다. Rajesh et al.(2005)은 ACC의 이용이 교통류의 안전성을 향상시켜 차량의 평균속도를 증가시킨다고 제시하였다.
실제 도로구간에서 첨단운전자보조시스템 및 ACC에 대한 실험을 진행하는 것은 법적인 측면과 안전성의 측면에서 많은 한계가 있으므로 이와 관련된 연구는 시뮬레이션을 통해 진행할 수 있다(Davis, 2004). Varotto et al.(2015)은 주행 시뮬레이터를 이용하여 ACC와 수동운전 주행모드 전환에 대한 연구를 수행하였다. Yannis et al.(2004)은 주행 시뮬레이션 데이터를 이용하여 ACC장착 유무에 따른 TTC를 산출하였다. 분석 결과 ACC 장착 시 평균 TTC는 약 10초로 ACC 미장착 시에 비해 약 7초 감소하였지만, TTC 값이 교통안전에 부정적인 영향을 미칠 정도는 아니라고 제시하였다. 또한 Naujoks et al.(2015)도 시뮬레이션을 이용한 자율주행시스템 관련 연구를 수행하였으며, 운전자의 작업부하 및 스트레스를 계량화 하는 분석을 진행하였다. 주행 시뮬레이터를 활용한 TTC임계값에 대한 연구(Yan et al.2014)에서는 주행 시뮬레이션 상에서 TTC가 일정치 이하가 되면 음성 충돌회피 경고가 발생하는 TTC 센서의 효과평가를 수행하였다. 이처럼 주행 시뮬레이션을 이용한 다양한 자율주행시스템 관련 연구에서 차량 간 상호작용을 TTC를 통해 분석하였다.
2. Jerk 분석 관련 연구
Jerk를 활용한 차량의 주행안정성 및 감속 및 위험상황 평가 연구가 다수 수행되었다. Zaki(2014)는 운전자가 충돌을 방지하기 위해 감속할 때 Jerk가 발생하며, 이는 운전자마다 상이함을 제시하였다. Gianaa et al.(1996)은 운전자가 가속도 자체보다 가속도의 변화량인 Jerk에 더 민감한 특성을 가지고 있음을 제시하였다. Bellem(2016)은 Jerk와 Headway를 활용하여 운전자의 주행행태 분석이 가능하다고 제시하였다. 또한 차량의 주행궤적과 운전자 행태연구에 있어 차량의 연속적인 궤적을 예측할 때 Jerk를 고려할 필요가 있다(Gindele, 2010). Jung et al.(2018)은 자율주행차량의 Jerk가 비자율차량과 전체 교통류의 흐름에 어떤 영향을 주는지 분석하였다. 연구결과, 자율주행차량은 Jerk의 제한을 낮춰서 승차감과 주행안정성을 향상시킬 수 있고, 주행속도와 주행성을 고려하여 Jerk의 제한을 높일 수 있는 것으로 나타났다. Bagdadi et al.(2013)은 Jerk의 최댓값과 최솟값의 차이인 peak-to-peak Jerk는 주행안정성을 검지하는 지표로서 활용될 수 있음을 제시하였으며 위험한 급감속 상황을 판단하기 위한 peak-to- peak Jerk의 임계값을 14.7m/s3로 설정하여 분석에 활용하였다. 또한 9.8m/s3의 peak-to-peak Jerk값을 위험상황을 판단할 수 있는 적정 임계값으로 제시하였다. 이처럼 다양한 감속상황에서 Jerk를 활용한 연구가 다수 수행되었다. Nygard et al.(1999)는 일상적인 운전의 감속상황에서 Jerk는 평균 –3.6m/s3를 나타내며 상충상황에서 Jerk의 최솟값은 -9.9m/s3--12.6m/s3범위의 값을 나타냄을 제시하였다. Aycin(2001)은 FRESIM 시뮬레이션 툴을 활용하여 차량추종모형의 안정성을 분석하였으며 최대 Jerk를 2.1m/s3로 설정하였다.
많은 연구자들이 시뮬레이션을 통한 자율주행 환경 및 ACC구현 방법에 관한 연구를 수행하였지만 비자율차와 비교하여 ACC가 교통류에 미치는 영향에 대한 연구가 대다수였으며, 운전자의 인지특성을 반영한 ACC 운영 방안에 관한 연구는 미흡하다. 본 연구에서는 영상기반 인지특성 조사를 통해 운전자의 주행안락감을 반영한 적정 ACC 운영파라미터를 도출하여 주행 시뮬레이션 실험에 반영하였다. 주행 시뮬레이션 데이터를 통해 운전자의 주행개입 여부 및 특성을 평가하였고, Jerk분석을 통해 차량의 주행안정성 평가를 진행하였다는 점에서 기존연구와 차별성을 가진다.
분석방법론
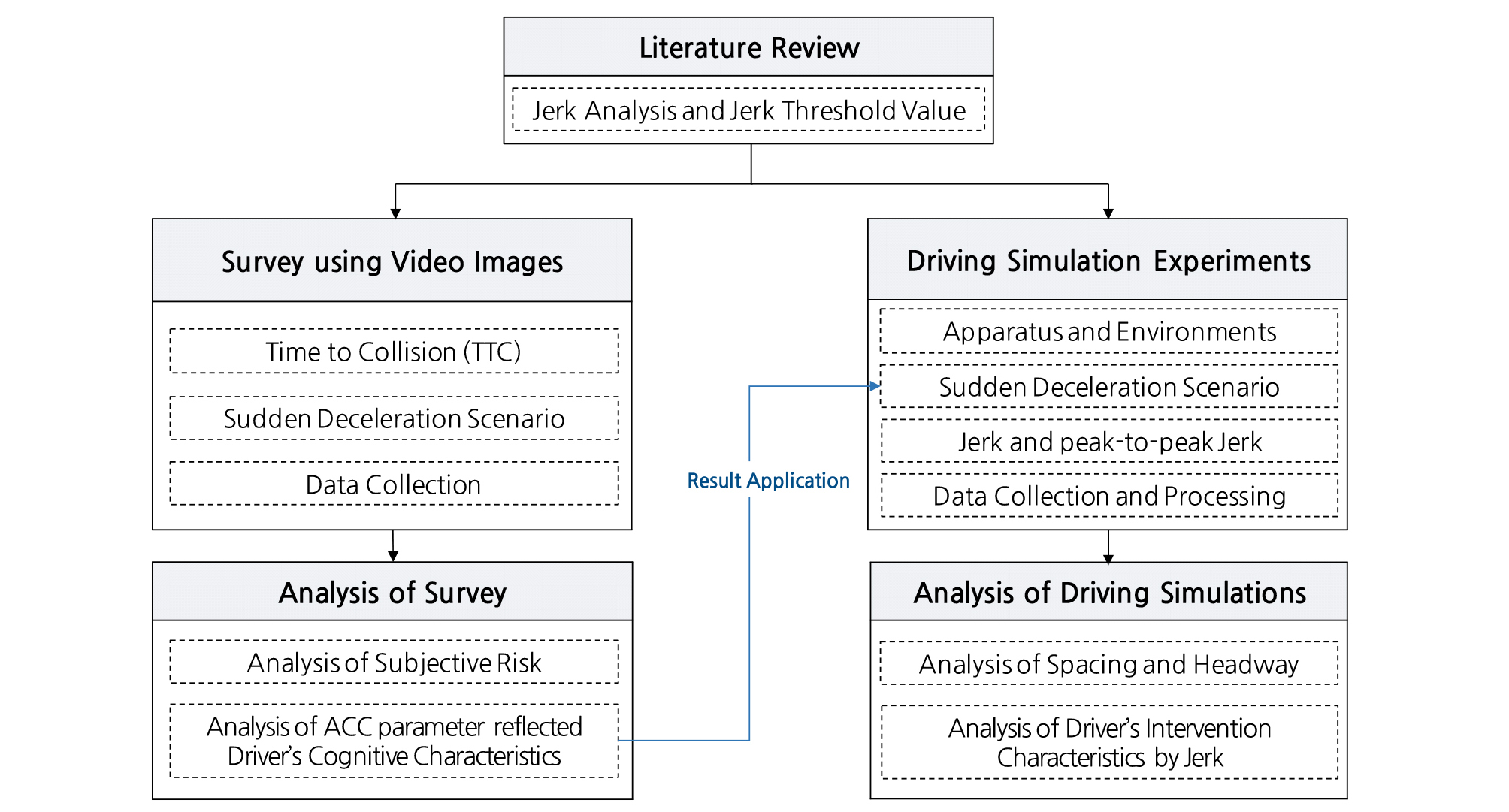
본 연구에서는 Figure 1에 제시한 바와 같이 영상기반 인지특성 조사를 수행하여 운전자의 인지특성을 반영한 ACC 운영 파라미터를 도출하여 주행 시뮬레이션 실험에 활용하였다. 또한 주행 시뮬레이션의 설정된 ACC 운영 파라미터 임계값에 따른 ACC차량 운전자의 개입 특성 및 차량의 주행안정성을 분석하였다.
1. 영상기반 인지특성 조사
영상기반 인지특성 조사는 피실험자가 주행 시뮬레이션 상에서 구현되는 ACC차량의 주행상황에 대한 시나리오 별 영상을 시청하고 이에 따른 피실험자의 주관적 위험도와 브레이크 및 가속페달을 작동을 통해 주행에 개입하고자 하는 의지를 조사하는 것을 목적으로 수행하였다. 영상에서 ACC차량은 설정된 TTC임계값을 기반으로 하여 선행차량을 추종하는 주행행태를 보이며, TTC 임계값에 따른 시나리오를 통해 운전자의 인지특성을 반영한 ACC 운영파라미터를 도출하여 향후 주행 시뮬레이션 실험의 시나리오 설계에 활용하고자 실험을 진행하였다.
1) 실험개요
본 연구에서는 TTC를 ACC 운영 파라미터로 정의하여 실험 시나리오 설계 및 분석에 활용하였다. 차량 추종 이벤트 상에서 선․후행차량이 속도변화 없이 현재의 속도를 유지할 경우, 후행차량의 속도가 선행차량의 속도보다 클 경우 충돌이 발생한다(Hayward, 1972). 이때 두 차량이 충돌하는 데 소요되는 시간을 TTC라고 하며, TTC가 0에 가까울수록 더 높은 충돌 가능성을 가지게 된다. TTC 산출식은 Equation 1에 제시하였다.
| $$TTC(t)=\frac{S_{FL}(t)}{V_f(t)-V_L(t)}$$ | (1) |
여기서, TTC(t): TTC at time step t
SFL(t): Vehicle spacing at time t
VF(t): Following vehicle speed at time t
VL(t): Leading vehicle speed at time t
ACC 운영 파라미터인 TTC 설정 값에 대해 총 10개의 시나리오를 선정하고 운전자의 인지특성을 분석하였다. TTC를 이용한 심각한 상충 발생 판단 기준은 1.5초이며(Vander Horst, 1993), 제한속도 100km/h 고속도로에서 정속 주행하는 후행차량이 정지상태의 선행차량과 무리 없이 후미추돌을 피하기 위한 TTC는 2초로 간주한다. 영상기반 인지특성 조사를 위해 본 연구에서 활용한 주행 시뮬레이터에서 설정 가능한 최소 TTC인 0.1초와 최대 안전거리를 적용한 TTC 및 선행 연구결과의 TTC를 반영할 수 있도록 TTC임계값을 0.2-2.0초(0.2초 간격)로 설정하였다.
2) 실험영상 시나리오 설계
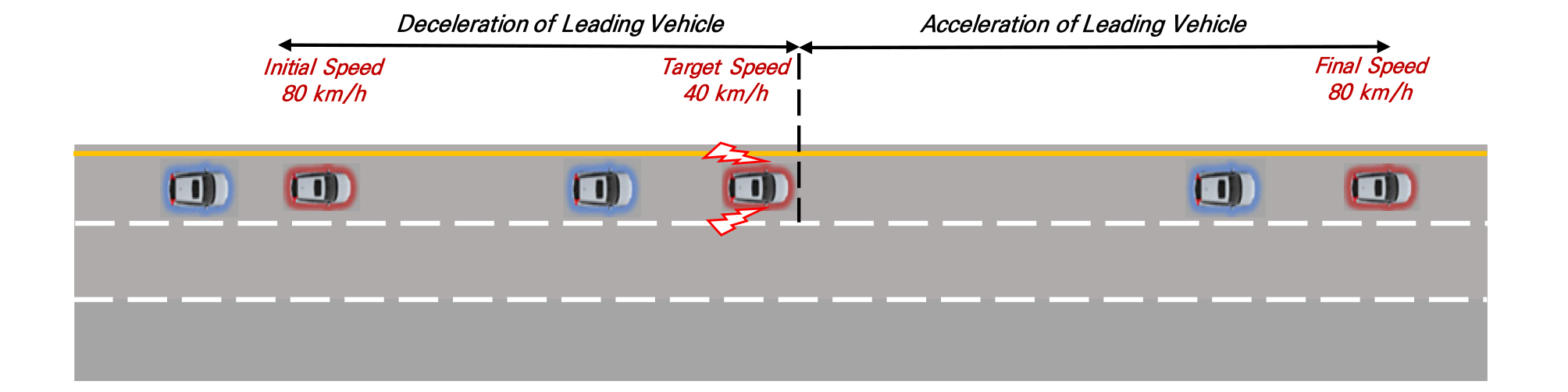
영상기반 인지특성 조사에 활용되는 실험영상은 주행시뮬레이터 기반 주행영상으로 제작하였다. 실험 시나리오는 선행차량과 후행차량간 관계에 따라 운영되는 TTC임계값에 따른 피실험자 인지특성을 조사하기위해 선행차량이 고의적으로 급감속을 수행하는 것으로 설정하였다. 실험영상에서 ACC차량은 설정된 TTC임계값을 기반으로 하여 선행차량을 추종하는 주행행태를 보이며, 선행차량은 초기속도 80km/h로 주행하며 특정구간에서 약 40km/h를 목표속도로하여 급감속을 수행한다. Figure 2에 실험영상 환경 및 선행차량 주행특성을 제시하였다. 시나리오는 TTC임계값 0.2초부터 2.0초 까지 0.2초 단위로 총 10개로 설계되었고, 피실험자에게 해당 영상의 TTC임계값을 제시하지 않은 상태로 조사를 진행하였다. 영상기반 인지특성 조사는 2018년 4월 4일 55명의 피실험자를 대상으로 진행하였으며 실험시간은 인당 약 25분정도 소요되었다. 피실험자의 성별은 남성 37명, 여성 18명이었으며, 모두 20대로 구성하였다.
영상기반 인지특성 조사 중 피실험자는 영상을 시청하며 시나리오별 주관적 위험도와 브레이크, 가속페달을 통한 주행개입 의지 여부에 대해 답변한다. 주관적 위험도란 피실험자가 영상을 시청하면서 해당시나리오에 대해 주관적으로 체험하는 위험도를 의미하며 최댓값을 100으로 가정하였다. 피실험자는 영상 시청 중 시나리오별 가속페달 작동의지와 브레이크 작동의지 여부를 기입한다. 또한 피실험자의 운전면허 유무와 운전경력 등의 기본적인 인적특성조사를 진행하였다.
2. 주행 시뮬레이션 실험
주행 시뮬레이션 실험은 앞서 제시한 영상기반 인지특성 조사의 결과로 도출된 운전자의 인지특성을 반영한 ACC 운영파라미터를 활용하여 실험을 진행한 후 피실험자 개별 데이터를 분석하기 위하여 수행하였다. 영상기반 인지특성 조사에서 피실험자가 기입한 브레이크 및 가속페달을 사용한 주행개입 의지 여부에 대하여 주행 시뮬레이터를 이용한 주행 시 실제적인 주행개입 여부를 관찰하고, 주행개입 시 운전자의 특성을 관찰하기 위하여 진행하였다. 또한 Jerk 및 peak-to-peak Jerk 분석을 통해 종방향 자율주행 환경에서의 주행안정성, 안전성 및 사고개연성 분석을 위해 실험을 수행하였다.
1) 실험환경
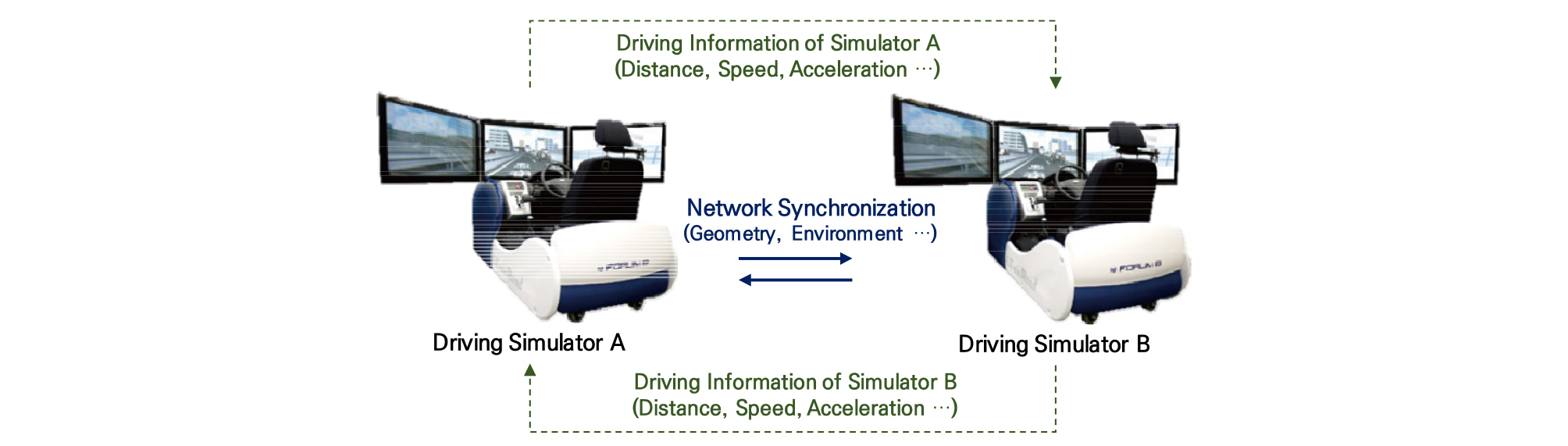
본 연구에서는 주행 시뮬레이터 소프트웨어인 UC-win/Road를 이용하였으며 Multi-Agent 소프트웨어를 통해 2대의 주행 시뮬레이터를 연결하여 동기화된 동일한 공간에서 주행 시뮬레이션이 가능한 네트워크 멀티 드라이버 환경을 구축하였다. Multi-Agent 주행 시뮬레이터 환경에 대한 설명을 Figure 3에 제시하였다. 구축된 네트워크상에서 선행차량과 ACC차량이 동시에 주행하며, 이 때 선행차량은 실험운영자가 주행하였고 피실험자는 ACC차량으로 주행하였다.
주행 시뮬레이션 상 Timestep별로 선행차량과 ACC차량의 실시간 TTC가 산출되며, 설정된 TTC임계값에 따라 ACC기능이 구현된다. ACC기능이 구현되는 상태로 주변차량이 존재하지 않을 시, 설정된 제한속도인 100km/h까지 가속하며 주행한다. 주행 시뮬레이터의 브레이크 강도 임계값을 설정하였고 임계값을 초과하여 브레이크 작동 시 ACC기능 해제가 가능하며, 본 연구에서는 브레이크 강도 Default값인 0.1을 임계값으로 설정하였다.
2) 실험 시나리오 설계
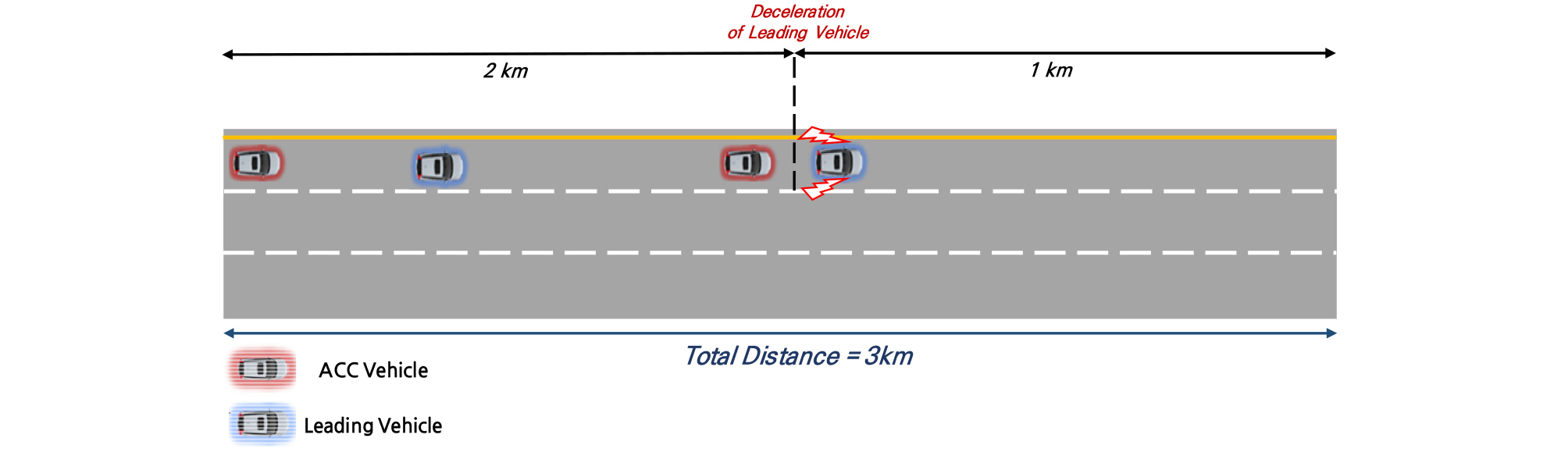
주행 시뮬레이션 실험환경은 영상기반 인지특성 조사의 실험환경과 동일한 3차로 연속류 직선도로의 2차로에 선행차량이 존재하며, 앞서 제시한 영상기반 조사 결과로 도출된 ACC 운영파라미터인 TTC임계값에 따라 ACC차량이 선행차량을 추종한다. 선행차량은 2km주행 이후 40km/h를 목표속도로 하여 급감속을 수행하고 이후 다시 가속하며 1km추가로 주행한 후 실험을 종료한다. 피실험자는 2km주행 이후 발생하는 선행차량의 급감속 상황 시점부터 브레이크 사용 또는 현재 상황 유지를 통한 자유의지로 ACC를 구현한다. Figure 4에 주행 시뮬레이션 시나리오와 주행구간을 제시하였다.
주행 시뮬레이션 실험은 2018년 5월 30일과 9월 12일 총 35명의 피실험자를 대상으로 진행하였으며 실험시간은 인당 약 35분정도 소요되었다. 피실험자의 성별은 남성 27명 여성 8명이었으며, 모두 20대로 구성하였다. 피실험자는 동일한 시나리오에 대해 연습주행 1회, 실 주행 1회를 수행하였다.
3) 데이터수집 및 처리
주행 시뮬레이션 실험을 통해 수집된 로깅 데이터 중 주행속도, 가속도, 주행거리, 브레이크 강도를 분석에 활용하였다. 주행거리와 주행속도 값을 이용하여 선행차량과의 Spacing을 산출하였고 이를 활용하여 평균 Headway를 산출하였다(Equation 2). 이는 ACC차량 운전자가 ACC작동을 해제 했을 시 선행차량과의 Spacing값을 관찰하고 이를 기반으로 평균 Headway를 산출하기 위하여 수행하였다.
| $$h=\frac{spacing+l_L}{V_f(t)}$$ | (2) |
여기서, h: headway(s)
spacing: Distance between leading vehicle and ACC vehicle
lt: Length of leading vehicle
VF(t): Speed of ACC vehicle at time t
설정된 브레이크 강도 0.1을 초과하는 시점을 통해 운전자의 주행개입 시점을 산출하였으며, 속도, 가속도 및 Jerk 분석을 위해 주행시간을 기준으로 분석시간간격을 1초로 설정하여 MATLAB R2018a를 통한 데이터 보간을 수행하였다. 수집 및 처리된 Data를 바탕으로 주행개입 유무 및 주행개입 시 주행특성을 분석하였으며, 피실험자별 주행프로파일을 산출한 후 Jerk분석을 수행하였다. ACC차량 운전자가 주행 중 브레이크를 사용한 시점을 주행개입 시점으로 정의하였으며, 이를 기준으로 주행개입 전, 후 시간 구간을 설정하였다. ACC작동 중 선행차량을 추종하는 시간부터 ACC차량의 주행개입시점 5초 전까지 30초의 시간을 주행개입 전 시간구간으로 설정하였으며, 이후 30초를 주행개입 후 시간구간으로 설정하였다.
4) Jerk
Jerk는 가속도의 단위시간 당 변화량으로, Jerk 산출식을 Equation 3에 제시하였다. Jerk는 가가속도, Jolt, Surge, Lurch 등의 다양한 이름으로 불리며 차량의 승차감을 나타낼 수 있는 물리량이다. Jerk는 저속주행과 고속주행 시 운전자의 승차감과 교통흐름에 미치는 영향이 상이하다. 가속도의 경우에 가속 시 뒤로 쏠리는 현상, 감속 시 앞으로 쏠리는 현상이 발생한다. 예를 들어 가속 시 Jerk값이 변화할 경우 뒤로 쏠리는 상황에서 앞뒤로 미세하게 진동하게 되며 운전자의 승차감 및 주행안정성이 저하되는 것으로 판단된다. 본 연구에서는 Jerk와 Jerk의 최댓값과 최솟값의 차이인 peak-to-peak Jerk를 분석에 활용하였다.
| $$j=\frac{da}{dt}=\frac{d^2v}{dt^2}=\frac{d^3r}{dt^3}$$ | (3) |
여기서, j: Jerk
a: Acceleration
r: Distance
t: Time
분석결과
1. 영상기반 인지특성 조사
영상기반 조사를 통해 TTC임계값에 따른 운전자의 주관적 위험도와 브레이크 및 가속페달 작동의지에 따른 주행 개입의지를 분석하였다. 영상기반 인지특성 조사는 0.2초부터 2.0초의 TTC임계값의 변화에 따른 총 10개의 시나리오를 구성하고, 각 시나리오의 주관적 위험도 및 주행 개입 의지를 분석하였다. 시나리오 별로 수집된 피실험자의 주관적 위험도는 피실험자마다 점수를 부여하는 기준이 다르며, 같은 점수임에도 각자가 느끼는 위험의 정도는 달라질 수 있기 때문에 Min-Max Scaling 기법을 통해 표준화하여 분석하였다. Min-Max Scaling은 개별 운전자의 채점범위를 고려하여 표준화하는 기법으로, 산출식을 Equation 4에 제시하였다.
| $$\dot d=\frac{d_i-\min d}{\max d-\min d}$$ | (4) |
여기서, diʹ:Standardized value of scenario I
di: Original value of scenario I
d: Original value
시나리오 별 표준화된 주관적 위험도의 평균값과 중앙값을 산출하고 이를 이용하여 주관적 위험도의 분포를 확인하였다. 주관적 위험도의 분포와 함께 피실험자의 TTC임계값별 브레이크 및 가속페달을 통한 개입의지 여부를 평가하였다(Figure 5). 이 때 브레이크 개입의지 빈도수는 선행차량과의 상호작용이 불안하거나 위험하다고 판단되어 피실험자가 주행에 직접 개입하고자 하는 빈도수를 의미하며, 그와 반대로 가속페달 개입의지 빈도수는 선행차량과의 상호작용에 있어서 차간거리가 다소 멀다고 판단되며, 피실험자가 현재 주행상황에 답답함을 느끼는 것을 의미한다.
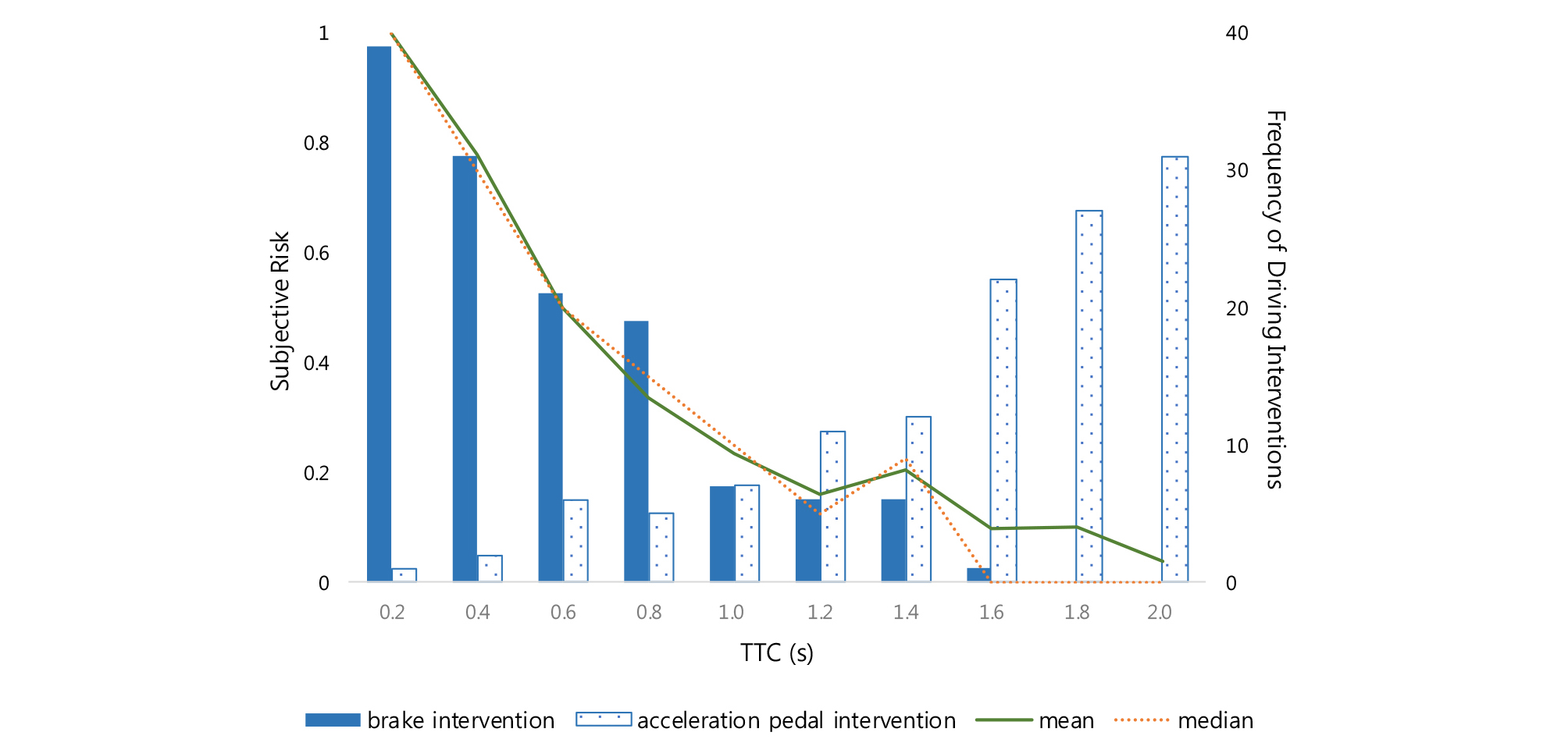
분석결과 TTC임계값이 0.2초부터 2.0초로 증가할수록 피실험자의 주관적 위험도 평균값과 중앙값이 감소하는 경향을 보이는 것으로 나타났다. 이는 ACC차량과 선행차량 사이에 유지되는 TTC임계값이 작을수록 ACC차량 운전자는 주행에 위험을 느끼고, TTC임계값이 클수록 위험의 수준은 낮아지지만 답답함을 느끼는 것을 의미한다. 또한 TTC임계값이 증가할수록 브레이크 개입의지 빈도수는 감소하는 경향이 나타났고, 가속페달 개입의지 빈도수는 증가하는 것을 확인하였다. 이는 TTC임계값이 증가할수록 피실험자는 가속페달 개입을 수행함으로서 현재상황에서 더 속도를 높게 하여 주행하고자 하는 경향이 있다고 판단되며, 선행차량과의 차간거리 및 주체차량의 속도에 대해 불만족하는 상황이라 판단된다. TTC임계값이 감소할수록 이와 반대되는 상황이 발생하는 것으로 판단된다.
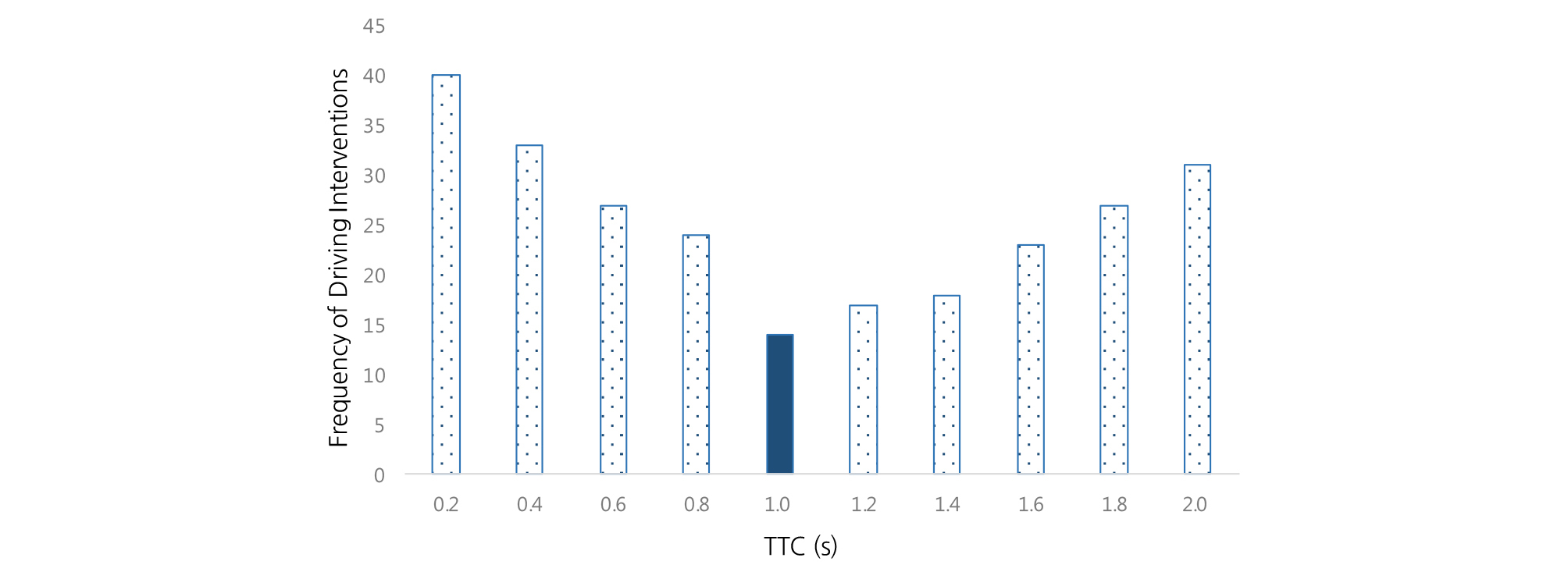
주행 시뮬레이션 실험에 활용될 TTC임계값 선정을 위해 브레이크 및 가속페달 개입의지 빈도수를 합산한 주행개입의지 분석 결과를 관찰하였다. 실험결과 TTC임계값이 1.0초인 경우 브레이크 및 가속페달 작동을 통한 주행 개입의지가 가장 낮게 나타났으며, TTC임계값에 따른 주행개입의지를 Figure 6에 제시하였다. 본 연구의 실험 시나리오는 첨단운전자보조시스템을 사용하는 상태, 즉 주체차량과 선행차량의 상충 및 사고의 개연성이 현저히 낮은 상태임으로 기존연구의 TTC수치와 의미하는 바가 다르며, ACC 환경에서 활용 가능성이 있다고 판단하였다. 결과로 도출된 1.0초의 TTC임계값은 ACC차량 운전자의 적정안락감과 주행 개입의지를 반영한 ACC 운영 파라미터로 판단되며, 주행 시뮬레이션 실험의 시나리오 설계에 활용하였다.
2. 주행 시뮬레이션 실험
1) 피실험자별 Spacing, Headway 분석
피실험자별 ACC작동 해제 유무, 주행개입 유형, ACC작동 해제 시 속도와 Spacing, Headway를 분석하여 결과를 제시하였다(Table 1). 분석결과 총 35명의 피실험자 중 선행차량의 급감속 주행행태 구현 이후 ACC작동을 해제하여 주행에 개입한 피실험자는 33명, ACC작동을 유지한 피실험자는 2명으로 관찰되었다. 피실험자의 ACC작동 해제 시 속도는 평균 94.671km/h로 나타났다.
Table 1. Analysis results of driving intervention
| The number of participants | Driving intervention (Yes: 1, No: 0) | Average speed on ACC OFF (km/h) | Average spacing on ACC OFF (m) | Average headway on ACC OFF (s) |
| 33 | 1 | 95 | 30 | 1.301 |
| 2 | 0 | - | - | - |
전체 피실험자의 ACC작동 해제 시 선행차량과의 Spacing 평균값은 약 29.405m로 관찰되었다. 이 때 Equation 2를 활용하여 동일 시점에서 Headway를 산출하였다. 그 결과 전제 피실험자의 ACC작동 해제 시 선행차량과의 Headway 평균값은 약 1.301초로 나타났다. 본 연구에서는 도출된 Spacing과 Headway값을 운전자의 주관적 위험도와 주행개입 의지를 반영한 TTC임계값을 적용하였을 때 운전자가 허용할 수 있는 적정 범위로 간주하였다. 또한 ACC차량과 선행차량과의 차간거리가 약 29m일 때 ACC차량 운전자의 주행 중 개입을 최소화할 수 있다고 판단하였다. 이와 같은 결과를 통해 도로 위의 ACC차량과 선행차량과의 차간거리에 따라 도로의 용량이 증대될 가능성이 있다고 판단하였다.
2) 피실험자별 Jerk 및 peak-to-peak Jerk 분석
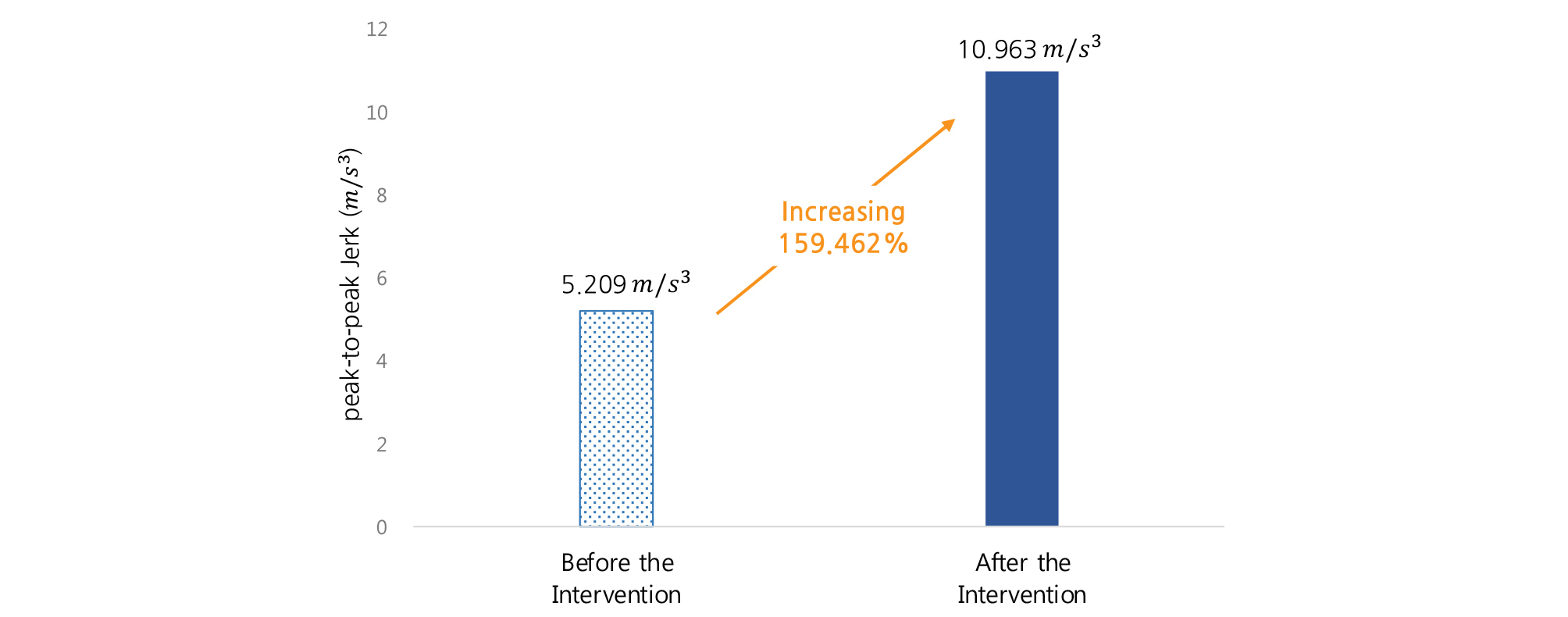
피실험자별 분석시간 구간 별 최대 Jerk, 최소 Jerk, peak-to-peak Jerk 및 증가율을 분석하여 결과를 제시하였다(Table 2). 분석결과 ACC차량 운전자의 개입 전 최대 Jerk대비 개입 후 최대 Jerk의 평균 증가율은 약 172.234%로 나타났다. 또한 개입 전 최소 Jerk대비 개입 후 최소 Jerk의 평균 감소율은 약 159.930%로 나타났으며, 이릍 통해 주행개입 후 peak-to-peak Jerk의 평균값은 10.963m/s3, 평균 증가율은 159.462%로 분석되었다. 즉, ACC차량 운전자가 주행에 개입한 후 최대 Jerk, peak-to-peak Jerk가 모두 증가하였다. 주행 개입 전 대비 개입 후 peak-to-peak Jerk 증가량을 Figure 7에 제시하였다.
Table 2. Analysis results of Jerk and peak-to-peak Jerk
결론
ACC시스템과 같은 첨단운전자보조시스템을 이용한 주행은 운전자의 주행 중 부담을 경감시켜 준다. 기존에 실시된 자율주행환경과 주행 시뮬레이션에 대한 연구는 대부분 ACC시스템이 교통류에 미치는 영향을 중심으로 분석하였다. 그러나 ACC 운영에 있어 운전자의 ACC 운영에 대한 신뢰도는 중요한 이슈이며, 운전자의 인지특성을 반영한 ACC 운영파라미터를 통해 시스템을 설계하는 것이 요구된다. 따라서 본 연구에서는 ACC시스템의 운영에 있어 운전자의 입장에서 운영파라미터를 고찰할 필요가 있음을 제시하였다.
본 연구의 목적은 ACC 운영에 있어 운전자의 인지특성을 관찰하고 그를 반영한 파라미터를 도출하여 주행안정성을 평가하는 것이다. 영상기반 조사와 주행 시뮬레이션 실험 시나리오는 TTC임계값에 따라 구현되는 ACC시스템을 이용한 주행 시뮬레이터를 기반으로 진행하였으며, ACC시스템에서 운전자가 선행차량과의 상호작용에 대해 체감하고 주행에 직접 개입하고자 하는 의지를 분석하기 위하여 실행하였다.
영상기반 조사 분석결과 TTC가 1.0초 일 때 ACC차량 운전자는 최소한의 주행개입 의지를 가진다고 나타났다. 이를 ACC운전자의 적정 안락감을 반영하여 운전자의 개입이 불필요하다고 판단되는 TTC임계값으로 간주하여 ACC 운영 파라미터로써 주행 시뮬레이션 시나리오 설계에 활용하였다. 주행 시뮬레이션 실험은 특정 시점 이후 ACC차량 운전자가 자유의지를 통해 ACC시스템의 해제 및 유지를 수행하도록 지시하였다. 총 35명 중 33명의 피실험자가 선행차량 추종 상황 중 ACC기능을 해제하여 주행에 개입하였고, 해당시점의 선행차량과의 차간거리는 평균 약 29.405m로 나타났다. 결과로 도출된 Spacing값을 ACC차량 운전자가 허용할 수 있는 선행차량과의 적정 차간거리 범위로서 해석하였다. 연구결과를 활용하여 첨단운전자보조시스템의 운영에 있어 운전자의 인지특성을 반영한 운영파라미터 설계를 통해 시스템의 운영 파라미터를 최적화하여 성능 및 신뢰도 제고에 기여할 것으로 기대된다. 반면에 첨단운전자보조시스템기술 적용 시 운전자특성을 고려한 운영파라미터와 네트워크 최적화된 운영파라미터 기반 교통류관리간 혼재가 있을 수 있어 적절한 교통운영방법론 구축이 필요할 것으로 판단된다.
또한 운전자의 주행 중 개입에 있어 그 특성과 주행안정성을 평가하기 위해 Jerk 및 peak-to-peak Jerk를 분석하였다. 분석결과 ACC차량 운전자의 주행개입 전 대비 주행개입 후 peak-to-peak Jerk의 평균 증가율은 159.462%로 나타났으며, 주행개입 후 peak-to-peak Jerk 평균값은 10.963m/s3로 분석되었다. 이를 선행연구결과의 적정임계값인 9.8m/s3 (Bagdadi et al., 2013)와 비교하여 유의한 수준으로 판단하였다. 연구결과를 기반으로 종방향 자율주행 상황에서 ACC차량 운전자의 주행개입은 운전자의 승차감 및 주행안정성을 저하시키며 ACC차량의 주행안락감과 주행안정성의 저하로 인해 주변차량과의 안전성이 저하되며 사고개연성이 높아질 것으로 예상된다. 또한 주행 시뮬레이션, 교통류 시뮬레이션 등에서 Jerk를 통한 운전자 안락감 및 주행안정성 평가가 가능할 것으로 기대된다.
본 연구에서는 ACC차량과 선행차량이 동일 환경에서 동시에 주행하는 Multi-Agent 주행 시뮬레이터를 활용하여 주행 시뮬레이션 실험을 수행하였으나. 선행차량의 주행을 실험운영자가 진행하였기 때문에 정확한 차량 간 상호작용 특성을 파악하기 어렵다는 한계점이 존재한다. 또한 주행 시뮬레이션 네트워크는 연속류 상황만을 고려하였으며, 정체상황을 고려하지 않았다. 또한 실험 전과 후에 ACC차량 운전자를 대상으로 ACC인지도 및 신뢰도를 조사하였으나 영상기반 인지특성 조사 및 주행 시뮬레이션 실험 데이터와 연계하여 분석을 수행하지 않았다는 점에서 한계가 있다. 향후 운전자의 주행 개입이 최소가 될 수 있도록 하는 ACC 및 첨단운전자보조시스템 운영 파라미터 설계 및 관리방안에 대해 연구할 필요성이 있다. 또한 첨단운전자보조시스템에 대한 실차실험을 통해 운전자 친화적인 파라미터 설계방안에 대한 실험 및 평가도 병행해야 한다.
