

서론
1. 연구의 배경 및 목적
2. 선행보행간격(Leading Pedestrian Interval)
본론
1. 평가방법 개요
2. 시뮬레이션 모형 구축
3. 요인별 LPI 효과 영향분석
4. 광주광역시 사례분석
결론
서론
1. 연구의 배경 및 목적
경제 성장과 동반된 자동차의 폭발적인 증가로 인한 교통사고의 증가는 세계적인 추세이며, 우리나라 역시 심각한 교통사고의 문제를 인식하고 있다. 따라서 국내에서도 교통사고의 발생 및 피해를 감소시키기 위한 많은 연구들이 진행되었으며, 기술 혹은 제도중심의 개선방안들을 시행중에 있다(Yoon et al., 2011). 하지만 우리나라에서 자동차 교통사고는 현재에도 지속적으로 발생하고 있으며, 2017년에 총 216,335건의 교통사고가 발생하였고, 그 중 총 4,185명이 사망, 322,829명이 부상을 당한 것으로 조사되었다(Road Traffic Authority, 2019). 교통사고로 인한 사회적비용도 막대한 수준으로, 2017년 한 해 도로교통사고비용이 총 23조 6,805억 원으로 2017년도 GDP의 약 1.4%, 국가예산의 약 5.9% 수준으로 추계되었다(Road Traffic Authority, 2018). 2013-2017년 최근 5년간 교통사고 현황을 조사한 결과, 전체 사고 유형 중 보행자 사고(차대사람) 비율은 22.2%로 차대차 사고(73.0%)의 약 30% 수준이나 치사율(사망자/사고건수,%)은 3.4%로 차대차 사고 0.7% 대비 약 5배로 나타났으며, 사망자는 8,814명으로 전체 사망자 22,952명의 38.4% 수준을 보여 보행자 교통사고 예방의 필요성이 확인되었다. 특히 횡단 중 발생한 보행자 교통사고는 전체 보행자 사고건수의 54.3%, 사망자수의 60.2%, 부상자수의 54.4%를 차지해 교통사고 및 사망자수를 줄이기 위해서는 횡단 중 보행 안전을 개선할 필요가 있는 것으로 분석되었다.
서울지방경찰청이 2016년 1분기 집계한 서울시 보행자 교통사고 사망자 48명 중 12명이 교차로에서 사망하였고, 그 중 절반이 우회전차량에 의해 사망(Jung, 2016)하는 등 신호교차로에서 발생하고 있는 교통사고 중 우회전차량과 보행자의 추돌사고는 사망사고로 직결될 수 있다는 점에서 반드시 예방되어야할 교통사고로 인식되고 있다. 따라서 이러한 사고를 예방하기 위하여 다양한 노력을 기울이고 있으며 그 중 선행보행간격(Leading Pedestrian Interval, LPI) 기법은 신호시간의 변경을 통해 회전하는 차량에게 보행자의 시인성을 증대시켜 보행자 추돌사고를 예방하고자 하는 기법으로 선진국을 중심으로 보행교통량이 많은 지역에서 시행되고 있으나, 국내에서는 아직 시행되지 않고 있다.
따라서 본 연구에서는 선행보행간격 기법의 국내적용을 위하여 1) 미국연방고속도로관리국(US FHWA)에서 개발한 대리안전척도 평가모형(Surrogate Safety Assessment Model, SSAM)과 미시교통시뮬레이션 모델인 VISSIM을 이용하여 LPI 기법의 효과를 현실적으로 산정할 수 있는 기법을 개발하고, 2) 개발된 기법을 적용하여 LPI의 효과에 기여하는 요인들을 분석하며, 3) LPI 기법을 적용함에 따라 발생하는 효과를 산정하는 것을 목적으로 한다.
2. 선행보행간격(Leading Pedestrian Interval)
우회전차량과 보행자의 사고예방 방법으로 험프설치 등과 같은 물리적인 개선방법과 우회전신호등 설치, 보행전시간 부여 등 신호운영에 의한 방법 등이 있으며 그 중 선행보행간격(LPI) 기법은 우회전차량의 시거를 확보하는 기법으로, 차량의 신호보다 보행자 신호를 3-7초 선행하여 등화 시켜 우회전차량 운전자의 보행자에 대한 시인성을 향상시키는 방법이다. 특히 노약자의 통행이 빈번한 교차로에서 그 효과가 현저할 것으로 예상되는데, 이는 아동의 경우 가시성이 떨어지고, 노인과 장애인 그룹은 신호에 대한 반응이 느리기 때문에 교통약자들에게 자신의 가시성을 개선하는 효과를 줄 수 있기 때문이다. 또한, LPI 기법은 우회전 신호등 설치, 험프 설치 등의 방법과 비교하여 신호시간의 변화만을 주기 때문에 시행에 따른 설치비용이 소요되지 않으며, 뉴욕시의 경우 약 2,000여개의 교차로에 LPI 기법을 적용하여 보행자 및 자전거이용자의 사망 혹은 중상자의 수가 37% 감소(New York City, 2018)하는 등, 비용과 효과 측면에서 그 우수성이 검증된 기법이다. Figure 1은 LPI 기법의 적용방법을 나타낸 것으로, 왼쪽 그림에서는 LPI 기법의 적용으로 보행자 녹색신호가 먼저 등화 되고 보행자가 횡단보도로 먼저 진입하는 것을 보여주며, 오른쪽 그림에서는 보행자가 횡단을 절반 정도 진행하였을 때 차량의 녹색신호가 등화 되어 보행자의 통행권 확보와 가시성이 향상되는 것을 보여주고 있다(Saneinejad and Lo, 2015).
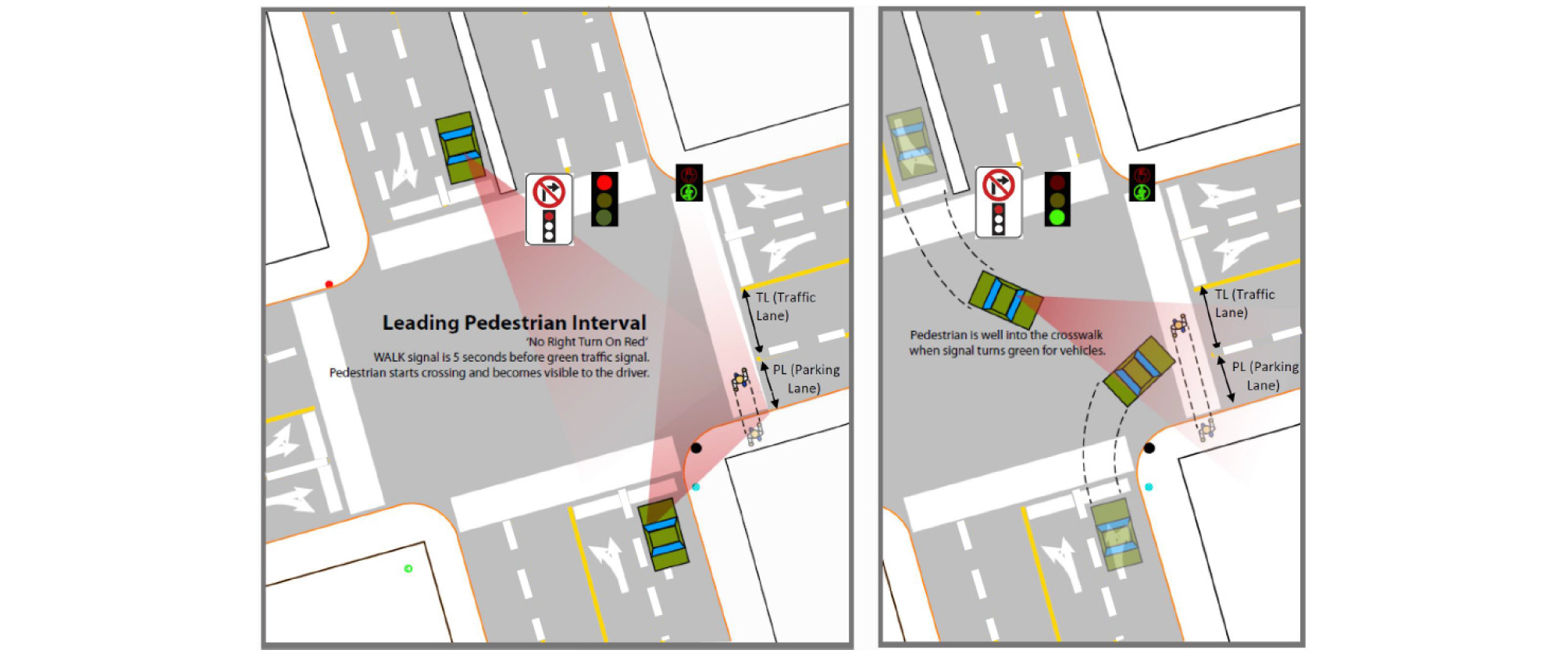
Figure 1.
How LPI works
source: Saneinejad and Lo(2015). Leading Pedestrian Interval Assessment and Implementation Guidelines.
LPI에 대한 국외 연구는 특정 지역의 현장 측정을 통한 분석이 주를 이루고 있으며, 국내의 경우 SSAM과 미시교통시뮬레이션을 조합하여 분석한 사례는 있으나 LPI의 효과를 산정한 사례는 전무하였다. 구체적인 선행연구의 내용을 살펴보면, Houten et al.(2000)은 플로리다 St. Petersburg 3개 교차로에서 LPI 기법을 적용한 결과 보행자가 횡단을 시작하는 시점에 충돌할 가능성이 95% 감소한 것으로 분석하였다. 구체적으로 3개 교차로에서 44번의 관찰기간을 두고 LPI 적용 전 ‧ 후를 비교한 결과 평균적으로 보행자 100명당 2-3명 정도로 발생하던 상충이, 34번의 관찰기간은 상충이 발생하지 않았고, 나머지 관찰기간에는 상충이 100명당 2명이 넘지 않는 것으로 집계되었다. 상충의 감소뿐만 아니라 보행 가능 시간도 증가하였는데 보행자 신호의 선행으로 인한 보행자 통행권이 증가한 결과이다.
Hua et al.(2009)은 샌프란시스코 3개 교차로에서 LPI 기법을 적용한 결과 보행자 앞에서 회전하는 차량이 65-76% 감소한 것으로 분석하였으나, 보행자와 차량 간의 상충 감소 효과는 각 교차로의 특성에 따라 상이한 것으로 결론지었다. Saneinejad and Lo(2015)는 토론토 교차로를 기준으로 LPI 기법 적용에 대한 가이드라인을 제안하였다. 또한 신호로 보호 받는 좌회전 차량에 대한 LPI 기법 적용의 불필요성, 미국 고속도로 안전 매뉴얼을 기초로 한 적신호시 우회전의 제한, LPI적용의 적합성 고려요소, LPI기법 적용 전 ‧ 후 상충분석에 대한 내용에 대해서도 언급하였다.
한편, SSAM과 VISSIM을 활용한 선행연구들을 살펴보면, Yoon et al.(2011)은 SSAM을 이용하여 대리척도를 통해 신호교차로에서 교통신호 제어 유형별 세 가지 시나리오에 대하여 차량 기준의 교차로 안전도 평가를 실시하였고, Parr et al.(2013)은 공항 Landside에서 교통운영을 평가하는 수단으로 VISSIM과 SSAM을 이용하여 차량효율과 보행자의 안전성을 평가하였다. 구체적으로 보행자 경로에 따른 2가지 방안을 선정하고 VISSIM과 SSAM을 이용하여 대리안전척도가 더 효과적인 방안을 채택하였다. Agarwal(2011)은 신호 및 비신호교차로에서 횡단하는 보행자의 안전성을 미시교통시뮬레이션 소프트웨어와 대리안전척도를 이용하여 추정하였다.
문헌고찰을 통하여 살펴본 대부분의 선행연구들은 LPI기법을 실제 현장에 적용하였을 때의 효율성 산정과 관련된 연구가 주를 이루고 있으나, LPI기법에 영향을 줄 것으로 예상되는 요인들에 대한 심도 있는 연구는 부족한 것으로 판단된다. 따라서 LPI기법의 효율성을 SSAM모형과 마이크로시뮬레이션 모형을 활용함에 있어 모형구축 시 주의하여야 할 사항과 함께 요인들에 대한 영향을 정량적으로 산정하는 것이 필요하며, 연구결과는 실무적으로는 LPI기법의 현장적용에 대한 기준으로 제공하고, 학술적으로 제반여건들의 영향을 산정함으로써 추가적인 연구를 수행함에 있어 기본정보를 제공하는데 기여할 것으로 판단된다.
본론
1. 평가방법 개요
본 연구에서 LPI 기법의 적용 효과를 평가하기 위해 VISSIM 소프트웨어를 이용하여 교통모형을 작성하고, 교통류를 구성하고 있는 개별차량들의 움직임을 모델링하여 그 결과를 SSAM 모형의 입력자료로 하여 상충분석을 시행하였다. SSAM은 미국 FHWA에서 상충이론을 기반으로 교통사고 분석과 관련된 사고관련 변수를 고려하여 자동적으로 상충분석 작업을 수행하고, 각종 시나리오 또는 설계 대안에 대한 안전성을 검증하기 위한 도구로써 개발하였다(Gettman et al., 2008; Pu and Joshi, 2008). SSAM은 VISSIM, TEXAS, AIMSUN 등과 같은 미시시뮬레이션 모델로부터 시뮬레이션 된 차량들의 개별 경로자료를 입력 자료로 하여 자동화된 상충분석기법을 적용시키는 모델로 이 경로자료는 네트워크에 생성된 개별 차량의 위치, 속도, 및 가속도와 시뮬레이션 시간 등을 포함한다(Yoon et al., 2011). 이러한 개별차량의 경로자료 분석을 통해 SSAM은 안전성 효과를 대리(Surrogate)할 수 있는 척도인 상충횟수, Time To Collision (TTC), Post Encroachment Time (PET), Maximum Speed (MaxS), 및 Delta Speed (DeltaS) 등을 산출하는데 이 대리척도는 실제 사고 자료를 활용하여 안전도를 산출할 경우 발생할 수 있는 자료수집의 한계를 극복하기 위하여 차량 움직임에 기반하여 안전도를 나타낼 수 있는 척도를 의미한다. 위에 언급한 주요 대리척도 외에 상충발생시 그 판단에 도움이 되는 차량의 Conflict Starting Point (CSP), Conflict Ending Point (CEP)와 차량관련 정보인 차량의 길이, 넓이, 대향방향, 상충각도, 예상충돌속도 등의 보조적인 척도 자료 역시 함께 수집된다. 이러한 대리안전척도들의 값은 상충 가능성과 충돌에 의해 발생 가능한 피해의 규모인 심각도를 표현하는데 사용된다. 추가적으로 SSAM에서 산출하는 상충횟수는 차량경로 파일별로 총 횟수, 교차형 상충 횟수, 추돌형 상충 횟수, 차로변경형 상충 횟수로 구분되는데, 이 발생 횟수는 사고 발생 예상 건수의 의미보다는 사고 발생 가능성으로 해석할 수 있다(Yoon et al., 2011). SSAM 소프트웨어에 이식되어 있는 모형들과 상충유형에 따른 모형의 검증과 관련한 자세한 내용은 다음 문헌에 기술되어 있다(Gettman and Head, 2003).
2. 시뮬레이션 모형 구축
본 연구에서 제안한 절차를 활용하여 LPI 기법의 효과를 측정 가능하도록 만들기 위해서는 VISSIM을 이용하여 구축하는 모형이 우회전차량과 보행자간의 상충을 현실적으로 묘사 가능하여야 한다. 본 절에서는 현실감 있는 VISSIM 모형의 구축을 위해 링크, 커넥터와 같은 모형의 구성요소들의 속성 설정에 대하여 기술한다. 시뮬레이션모형 개발의 일반적인 과정은 네트워크 구축, 교통류 파라미터 모델링, 경로 설정, 회전에 대한 감속 설정, 상충지역에서의 우선순위 할당 및 신호운영 설계 등과 함께 모형의 정산과정을 포함하고 있다. 구체적으로, 미시 시뮬레이션을 이용하여 보행자를 모델링하는 경우에는 연령 등과 같은 요인에서 기인하는 보행자의 다양하고 이종적인 특성을 고려하기 위하여 보행자와 관련된 모형의 검증과 정산 과정이 중요(Galiza et al., 2012)하지만, 본 연구에서는 LPI 효과에 기여할 것으로 예상되는 요인들의 영향에 집중하기 위하여 이러한 보행특성은 고려하지 않고 보행자의 Headway만을 확률적으로 모델링하여 분석을 수행하였다. 또한, 시뮬레이션 모형 구축 시 우회전차량과 보행자간의 상충을 현실적으로 묘사하는 것을 목표로 비교적 단순한 형태의 T형 3지교차로를 대상으로 하였다. 교차로 및 횡단보도의 설계는 도로설계편람(Ministry of Land, Transport and Maritime Affairs, 2012)의 내용을 반영하였으며, 접근로 길이는 500m로 설정하였다. 또, 상충 양상의 단순화를 위해 T형 3지 교차로에서 횡단보도는 부도로에만 1개소 설치하였다. 주도로와 부도로의 차로 수는 접근로별로 2차로 즉, 양방 4차로로 구현하였다. 교차로 기하구조와 교통상황 등과 관련된 사항은 Table 1에 요약하였으며, 시뮬레이션 모형 구축에 관한 추가적인 세부 사항들은 다음과 같다.
Table 1. Properties of simulation model
교차로 구축을 위해 링크와 커넥터는 Figure 2와 같이 1번부터 9번까지 총 9개, 접근로별 차로의 최소길이는 500m로 설정하였으며, 횡단보도는 7번, 8번 링크가 서로 겹치게 하여 양방 통행하는 보행자를 모델링하도록 설치하였다. 링크 9번은 우회전 차량과 보행자의 관계를 확인하기 위해 우회전 전용 차로로 설정하였으며, 커넥터 1,000번을 통해 6번과 9번 링크를 연결하였다.
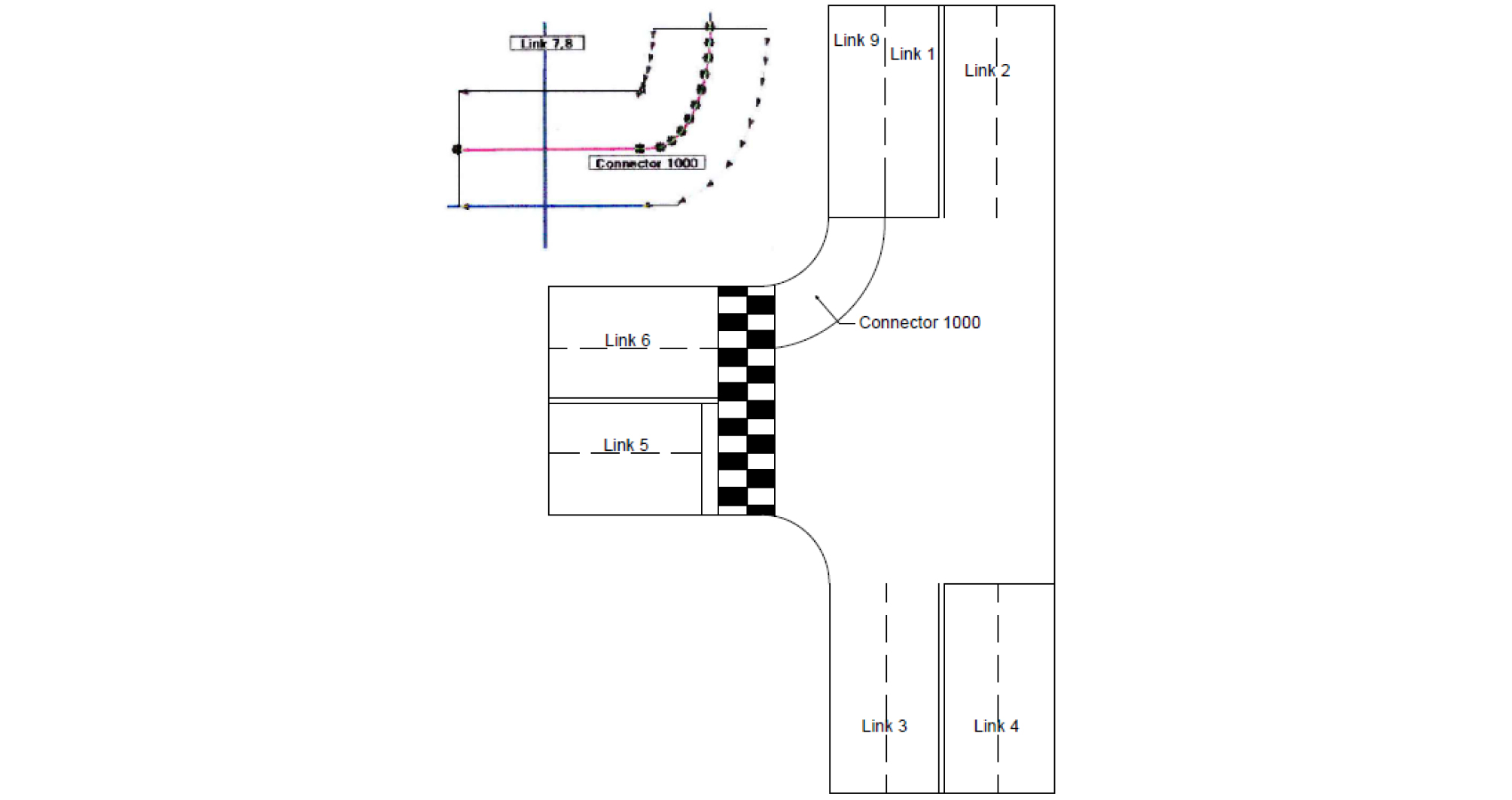
여기에서 주목할 점은 커넥터 1000번의 설정에 따라 LPI 기법 적용의 효과를 나타내는 상충의 횟수가 변경되는 것을 확인하였다. VISSIM 매뉴얼에 의하면 일반적으로 모형 구축 시 커넥터는 링크를 연결함에 있어 가장 짧게 설정하는 것을 장려하고 있어, 연구 초기에는 이를 최대한 짧게 설정하여 분석하였다(PTV, 2008). 그 결과, 상충분석 방법을 바탕으로 시뮬레이션 화면에서 발생하는 상충횟수와 SSAM모형의 결과가 상당한 차이를 보여 차량과 보행자의 상충을 현실적으로 묘사하기 어려운 것으로 판단되었다. 이는 링크와 커넥터의 연결이 분리되는 지점이 상충이 발생하는 곳과 중첩되어 SSAM 분석에서 누락되는 상충이 발생하기 때문이다. Figure 2에서 좌측 위 부분은 VISSIM 상에서 링크의 중심선(Center line)을 표시한 것으로 수차례의 시행착오를 통하여 시뮬레이션 화면과의 비교를 통하여 최종적으로 그림과 같이 커넥터 1,000번을 횡단보도를 넘어서까지 연결한 방법이 SSAM을 통한 분석 결과와 가장 유사한 결과를 보이는 것으로 분석되었다.
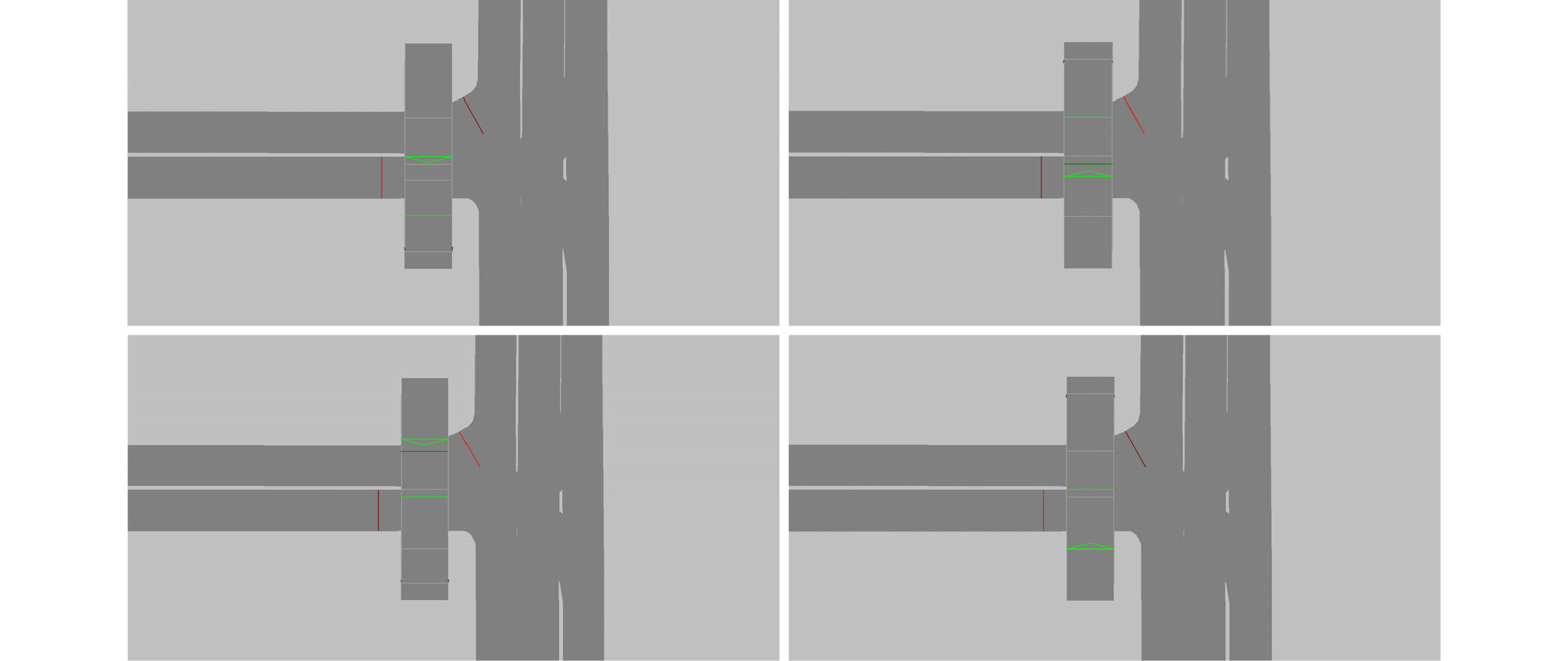
횡단보도의 경우 도로설계편람(2012)에서 제시한 내용에 따라 횡단보도의 폭은 4m로 위치는 보차도 경계선 연장선의 5m 뒤로 설치하였다. 커넥터의 설정 뿐 아니라 VISSIM 상에서의 설정 항목인 우선순위 규칙(Priority Rules) 역시 우회전차량과 보행자간의 상충에 영향을 미치는 요소 중 하나이다. 본 연구에서는 Figure 3과 같이 횡단보도의 양쪽에서 횡단을 시작하는 보행자가 횡단보도에 진입하는 경우 차량이 커넥터 위의 선에 정지하도록 설정하였으며, 구체적으로 우선순위의 규칙은 차간시간 및 차두간격을 통해 그 설정구역의 범위를 지정하는데 본 연구에서는 기본 값인 3초와 5m를 적용하였다. 그 외 Reduce Speed Area, Desired Speed 등에 대한 설정은 VISSIM의 기본 값을 적용하여 네트워크를 구축하였다.
3. 요인별 LPI 효과 영향분석
앞 절에서 기술된 사항들을 반영한 시뮬레이션 모형을 구축하고 LPI 기법 적용에 따른 효과에 영향을 줄 것으로 예상되는 요인인 교통량, LPI적용시간, 보행량, 기하구조를 변화 시켜 시뮬레이션을 수행하였다. 시나리오 별로 시뮬레이션의 변동성을 고려하기 위하여 난수를 이용하여 총 5회 반복하여 시뮬레이션을 수행하고 평균값을 산출하여 요인별 영향을 분석하였다. 요인별 영향 분석에는 앞서 언급된 교차형, 추돌형, 차로변경형 상충횟수의 합과 더불어 교차로의 평균지체를 산출하여 교차로의 소통 상태와 안전성의 상관관계를 분석하였다.
효과의 비교분석에 기준이 되는 시나리오(Base case, 이하 기준모형)는 앞 절에서 기술된 물리적 모형에 교통량은 도로설계편람(2012) 교통신호기 설치기준에 의거 접근로별 교통량을 600대/시간 이상인 경우부터 1,600대/시간 까지 200대/시간 단위로 변경하여 총 6가지 시나리오에 따른 LPI 기법 적용 전 ‧ 후의 지체 및 상충횟수의 변화를 관찰하였다. 이 때, LPI 시간은 5초를 적용하였고 차량은 승용차로 일관되게 설정하였으며, 좌회전, 직진, 우회전 교통량의 비율은 1:1:1로 설정하였다. 보행자는 양방 200명/시간으로 설정하였다.
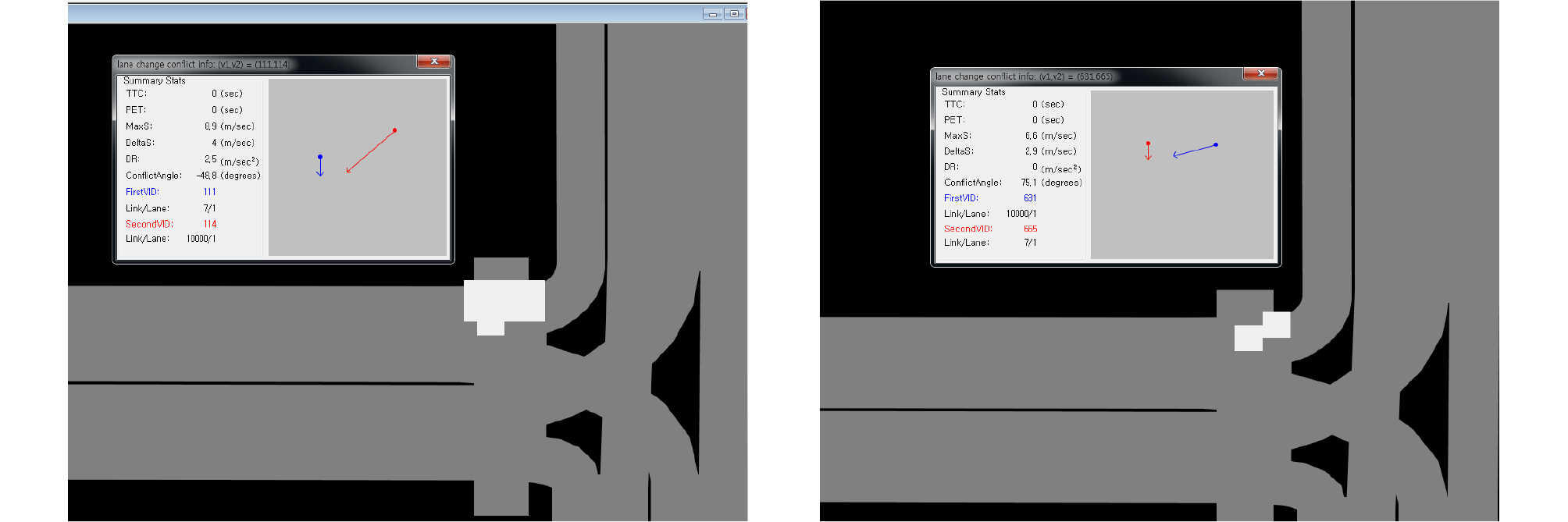
신호현시 설정은 도로설계편람(2012)을 참고하여 주기를 권장 값인 120초로 하여 현시별 신호에 황색신호를 포함하여 각각 40초를 부여 하였으며, 황색시간은 3초로 고정하였다. 보행자녹색시간은 녹색고정시간 7초와 도로 폭 변화 및 차량녹색시간을 고려하여 시간을 설정하였으며, 기본시나리오의 경우 27초를 적용하였다. LPI 시간은 적용 시간에 따라 첫 번째 현시의 차량신호 시작을 늦추는 방식으로 운영하였고 그 내용은 Table 2와 3에 요약하였다. Figure 4는 SSAM 모형을 통해 LPI 적용 전 ‧ 후 결과 중 한 사례를 시각화 한 것으로, 팝업창의 좌측 화살표는 보행자이며 우측 화살표는 차량의 진행 방향을 나타낸다. 그림에서 네트워크 모형 위의 사각형은 각 상충의 위치를 표시한 것으로 횡단보도와 차량의 상충을 보여주고 있다.
Table 2. None-LPI signal plan
| Phase | 1 | 2 | 3 | Cycle | |
| ↓↑ | ↰↑ | ⤴ | |||
| Pedestrian | Green/Amber (duration) | 1-7 / 8-27 (27s) | 0 | 0 | 120s |
| Vehicle | Green/Amber (duration) | 1-37 / 38-40 (40s) | 41-77 / 78-80 (40s) | 81-117 / 118-120 (40s) | |
Table 3. LPI signal plan
| Phase | 1 | 2 | 3 | Cycle | |
| ↓↑ | ↰↑ | ⤴ | |||
| Pedestrian | Green/Amber (duration) | 1-7 / 8-27 (27s) | 0 | 0 | 120s |
| Vehicle | Green/Amber (duration) | 6-37 / 38-40 (35s) | 41-77 / 78-80 (40s) | 81-117 / 118-120 (40s) | |
1) 교통량의 영향
앞서 기술한 바와 같이 교통량을 변화시키면서 LPI 기법의 적용 전 ‧ 후 상충횟수 및 대리척도 평균값의 변화와 교통소통 측면에서 지체를 관찰하였다. Table 4에서 보는 바와 같이 교통량이 증가함에 따라 상충횟수가 증가하는 것은 아닌 것으로 분석되었다. 이는 보행자 교통량을 고정한 결과로 판단된다. 한편 신호교차로의 서비스 수준은 교차로의 평균지체를 통해 판단하게 되는데 교통량의 증가에 따라 LPI기법 적용전에도 평균지체 값이 증가한 것을 볼 수 있다. LPI기법을 적용한 경우 적용전과 비교하여 평균지체가 다소 증가한 것을 확인할 수 있는데 최소 1.58초/대에서 최대 6.08초/대 증가한 것으로 분석되었다.
Table 4. Changes in effects of LPI technique by traffic volume
분석결과를 도로용량편람(Ministry of Land, Transport and Maritime Affairs, 2013)의 서비스수준 기준과 비교하여 1,400대/시간의 경우가 용량상태에 가까운 서비스수준 E로 분석 되었으며, Table 5는 교통량 1,400대/시간인 경우의 분석결과로 여기에서 보는 바와 같이 대리안전척도 값들은 안전성이 향상되는 방향으로 변화되었음을 확인할 수 있다. 구체적으로 TTC값의 경우 적용 전 ‧ 후 0.36초(157%) 증가하였으며, PET값의 경우 0.77초(367%) 증가하여 LPI기법 적용의 효과를 가늠할 수 있었다. 하지만 TTC값과 PET값의 변화에서 볼 수 있듯이 절대적인 변화가 각각 1초보다 적고, Table 4에서 보는 바와 같이 LPI적용 후의 상충횟수가 90% 이상의 감소효과를 보여 평균값을 산정할 수 없는 경우가 발생하였다. 따라서 교통량을 제외한 다른 요인들의 효과분석에서는 상충횟수의 변화를 통해 LPI기법의 효과를 산정하였다.
Table 5. Changes in surrogate safety measures in the case of traffic volume of 1,400veh/h
2) LPI 적용시간의 영향
LPI와 관련된 이전의 연구결과에 따르면 LPI의 적용시간은 최소 5초 또는 그 이상(횡단보도를 절반 횡단할 수 있는 시간)으로 설정하도록 제안하고 있어 기준 모형에서는 5초로 설정하였다. 본 절에서는 LPI 의 적용시간에 따른 안전 및 교통소통 측면에서의 영향을 산정하기 위하여 LPI 적용시간을 3초에서 8초까지 1초씩 증가시키면서 평균지체와 상충횟수를 비교하였다. Table 6에서 보는 바와 같이 적용시간의 증가에 따라 상충횟수의 감소양상을 보였으나 적용 시간에 구분 없이 적용 전 ‧ 후 감소 효과는 약 40-50여회로 비슷한 결과가 산출되었다. 특히 여기에서 주의를 기울일 만한 가치가 있는 사실은 선행 연구사례와 마찬가지로 LPI의 적용시간은 5초에서 상충횟수가 현격히 감소되는 것으로 보아, 최소 5초 또는 그 이상을 적용하는 것이 타당한 것으로 분석되었다. 적용시간이 증가하면 차량의 평균지체가 증가하였는데 이 부분을 감안하지 않고 안전 측면만 고려하면 현 기준모형에서의 효과가 가장 크게 나타난 적용시간은 7초로 분석되었다.
Table 6. Changes in effects of LPI technique by duration time
| Duration time (s) | None | 3 | 4 | 5 | 6 | 7 | 8 |
| Average delay (s/veh) | 84.92 | 87.32 | 87.78 | 89.76 | 92.66 | 94.42 | 94.18 |
| Conflicts | 52.6 | 9.2 | 7.8 | 1.8 | 1.0 | 0.2 | 0.4 |
3) 보행량의 영향
보행자의 교통량에 따른 LPI기법의 효과에 대한 영향을 관찰하기 위하여 기준모형에서 보행자의 교통량을 양방 100명/시간부터 300명/시간까지 50명/시간 간격으로 증가시키며 분석을 수행하였다. Table 7에서 보는 바와 같이, LPI기법 적용 전 보행자의 증가에 따라 상충횟수의 변화가 선형적으로 증가하는 것은 아니나 양방 100 명/시간과 비교하여 상충횟수가 대체적으로 증가한 것을 알 수 있다. LPI기법 적용 후 상충횟수는 모든 경우에 90% 이상 감소한 것을 확인하였으며, 이로부터 보행량의 많고 적음에 따라 효과가 변화하는 것이 아닌 것을 알 수 있었다. 따라서 보행량이 많은 경우 상충횟수가 일반적으로 증가하고 LPI기법은 이러한 상충을 90% 이상 감소시킬 수 있으므로, 일반적으로 보행량이 많은 곳에서 더욱 큰 효과를 보이는 것으로 판단할 수 있다.
Table 7. Changes in effects of LPI technique by pedestrian volume
4) 기하구조의 영향
교차로의 기하구조 변화에 따른 영향을 산정하기 위하여 도시 내 교차로 운영에 빈번하게 사용되는 총 네 가지의 시나리오를 도출하고 이를 시뮬레이션으로 구현하여 LPI기법의 효과를 비교 분석하였다. 구체적으로 기본모형은 주도로 접근로 2차로와 부도로 접근로 2차로인 경우이며, 여기에 주도로의 차로수를 한 차로 증가시킨 경우와 부도로의 차로수는 한 개 차로 감소시키거나 두 개 차로 증가시켰을 경우와 비교하였다. Table 8에서 “2-Lane×1-Lane”은 주도로의 접근로의 차로수가 2차로이고 부도로의 접근로 차로수가 1차로인 것을 의미한다. 횡단보도의 경우 이전에 기술한 바와 같이 부도로 상에 설치하였는데, Table 8에서 보는 바와 같이 LPI기법 적용 전은 부도로의 차로수가 많아질수록 즉, 횡단거리가 길어질수록 상충횟수가 현저히 증가하는 것으로 분석되었다. LPI의 적용 후에는 교차로의 형태와 상관없이 상충횟수가 90% 이상 감소하는 것으로 확인되었다.
Table 8. Affections of LPI with geometry
4. 광주광역시 사례분석
본 절에서는 실제 현장에서 운영되고 있는 교차로에 LPI기법을 적용하였을 때의 효과를 산정하기 위하여 광주광역시(Gwangju Metropolitan City Office, 2015)에서 수행한 교통관련 기초조사 보고서에서 선정된 61개 교차로를 대상으로 LPI기법이 적용 가능한 곳 3개소 선정하였다. 선정과정에서 운영되고 있는 교차로의 차로수를 감안하여 대표적인 형태 3가지를 도출하였고, 지하차도와 고가차도와 같이 입체교차로로 운영되는 곳과 교통섬이 설치되어 우회전 차량이 분리 되는 교차로 또한 대상에서 제외하였다. 선정된 교차로의 형태와 이름은 Table 9와 같다.
Table 9. Selection of intersections
| Type | Intersection name |
| 4-Lane×3-Lane | Ssangchon-yeok 4-way intersection |
| 4-Lane×4-Lane | Seobang 4-way intersection |
| 5-Lane×3-Lane | Cheom dan Himart 4-way intersection |
선정된 3개의 교차로의 기하구조에 따라 시뮬레이션 모형의 물리적인 형태를 구현하고, 광주광역시(2014) 교통관련 기초조사 보고서의 첨두시 교통량과 현재 신호운영안에 따라 시뮬레이션 모형을 완성하였다. LPI의 적용시간은 효과 요인 분석 시 가장 효과가 좋았던 5초와 7초로 설정하였으며, 실제 교차로의 형태, 교통량, 신호운영 및 LPI 적용을 포함한 세부 내용은 Figures 5-10에 기술되어 있다.
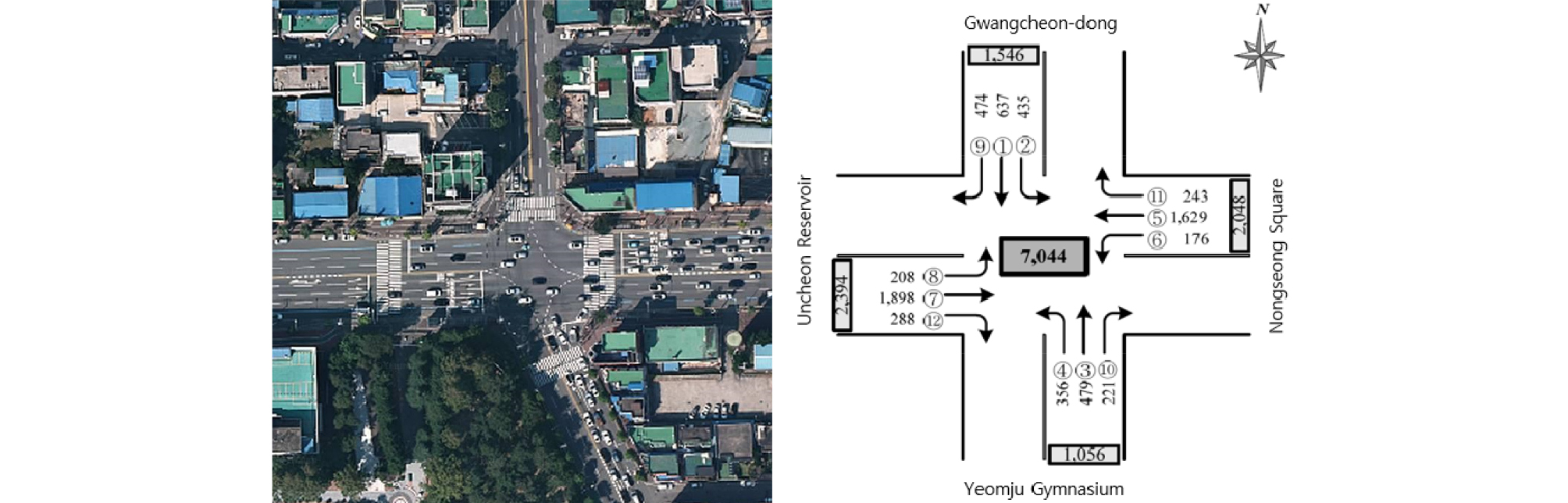
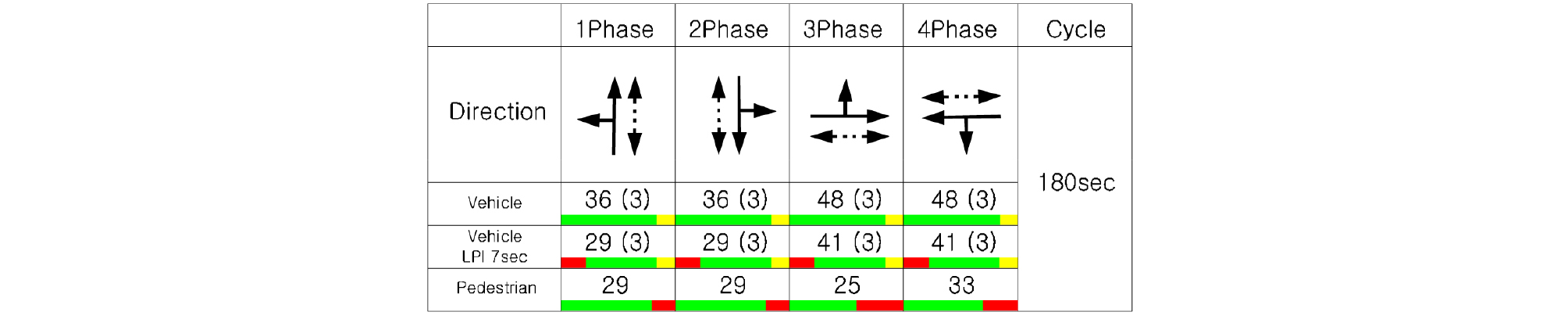
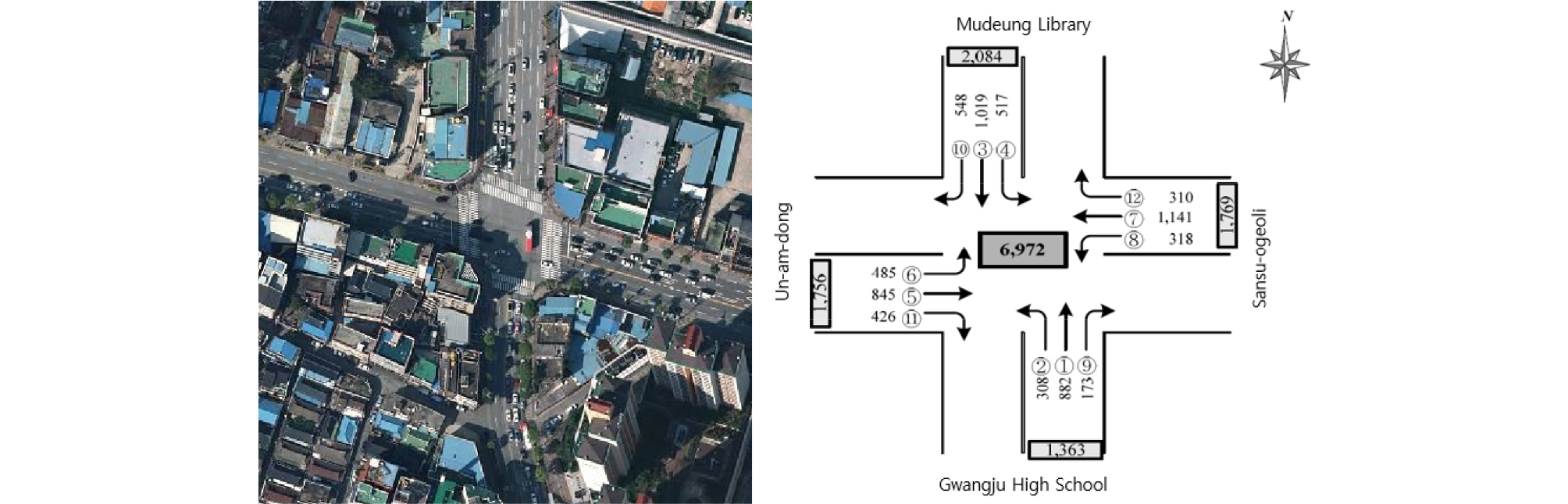
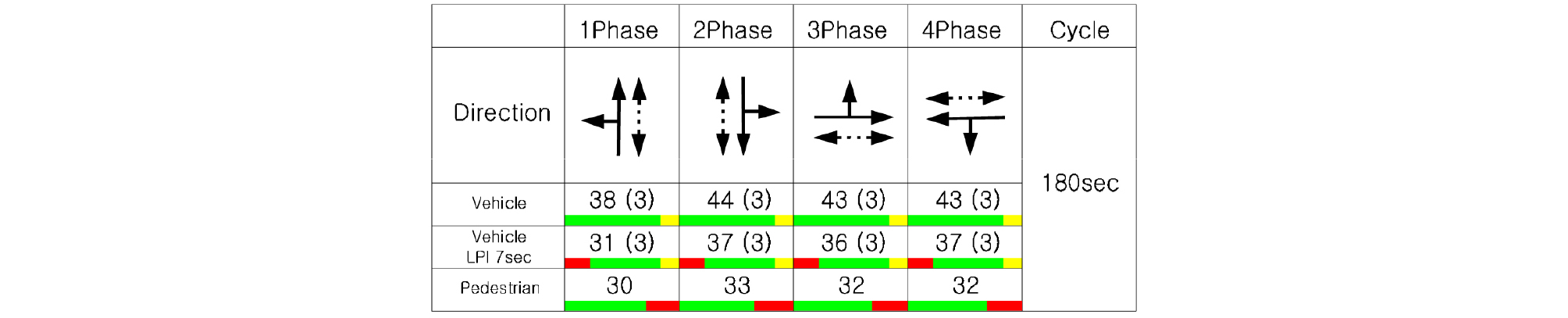
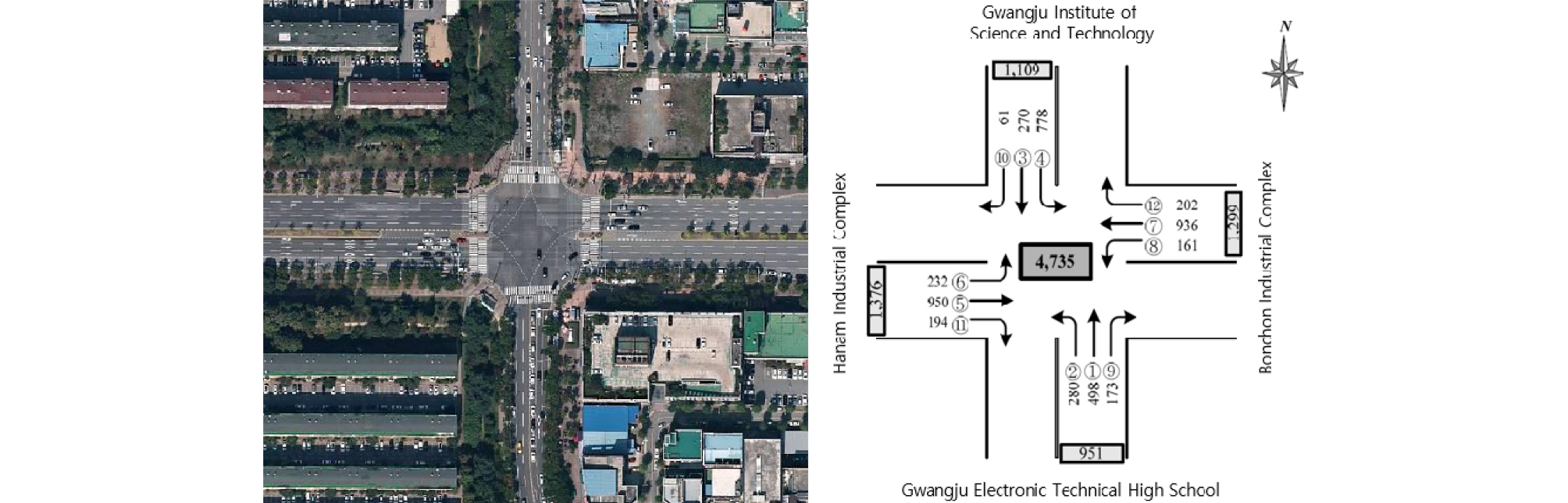
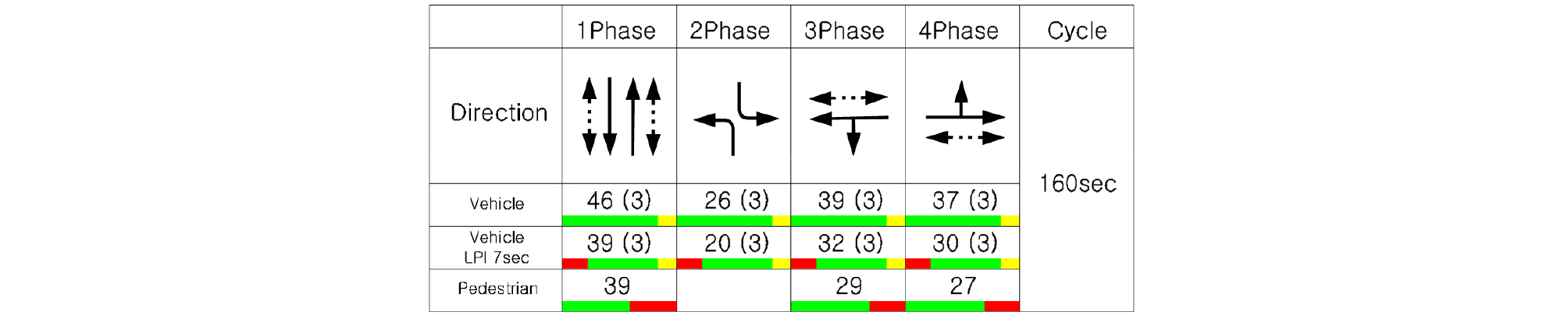
Table 10에서 보는 바와 같이, 분석결과 선정된 모든 교차로에서 LPI기법 적용의 효과가 현저한 것으로 분석되었다. 구체적으로 4차로와 3차로로 운영 중인 쌍촌역사거리의 경우 상충횟수가 98.0% 감소한 것으로 분석되어 가장 효율이 큰 것으로 분석되었고, 4차로와 4차로로 운영 중인 서방사거리의 경우 각각 92.8%와 95.5% 감소, 5차로와 3차로로 운영 중인 첨단 하이마트의 경우 97.1% 감소한 것으로 분석되었다. 특히 서방사거리의 경우 LPI기법 적용 전 총 상충횟수가 125.2회 발생하여 가장 위험도가 높은 교차로로 분석되었는데, Figure 7에서 보는 바와 같이 교차로가 비정형적인 형태를 가지고 있어 안전측면에서 효율적이지 못한 것으로 판단된다. 반면, 첨단 하이마트 교차로의 경우 교차로를 이루는 두 도로가 직각을 이루고 있고 5차로와 3차로로 운영되고 있는 비교적 규모가 큰 교차로로 우회전 차량이 상대적으로 보행자에 대처할 시간이 많아 상충횟수가 다른 교차로에 비해 적은 것으로 판단된다. 따라서 실제 LPI기법 적용을 위해 현장에서 고려해야할 사항 중 차로수 규모에 따른 교차로의 형태와 함께 비정형의 정도 또한 고려하여야 할 것으로 판단된다. 한편, 교차로의 평균지체의 경우 Table 10에서 보는 바와 같이 LPI 적용에 따라 상당히 증가하는 것으로 분석되었다. 이는 LPI 시행 전에도 교차로의 교통수요가 교차로의 용량을 넘어서고 있으며, 여기에 추가적으로 LPI 기법을 적용함에 따라 차량이 사용할 수 있는 신호시간이 감소하게 되어 발생된 결과로 판단된다. 따라서 LPI 기법의 현장 적용에 있어 교차로의 운영성능 약화와 보행자 안전향상간의 trade-off의 상관관계를 심도 있게 분석하는 것이 선행되어야 할 것이다. 본 사례의 경우 LPI 적용시간을 5초로 설정하는 것이 차량지체와 안전측면에서 더 좋은 대안임을 알 수 있었다.
Table 10. Affections of LPI each intersections
결론
본 연구에서 LPI 기법 적용에 따른 영향분석을 위해 VISSIM과 SSAM을 통합한 상충분석방법에서 가장 중요한 요소는 우회전차량과 보행자 간의 상충을 현실감 있게 묘사할 수 있는 시뮬레이션 모형의 개발이다. 구체적으로 상충분석을 위한 모형 개발 시 가장 핵심적인 사항은 링크를 연결하는 커넥터의 설정이었다. 일반적으로 링크를 연결하는 커넥터는 가능한 범위에서 가장 짧게 설정하는 것이 권장되었으나, LPI 기법 평가를 위해서는 링크와 커넥터를 중첩되게 설정하여야 현실감 있는 상충을 재현할 수 있었다. 이러한 사실은 향후 보행자와 차량 간의 상충분석에서 VISSIM 모형 구축에 현실적인 도움이 될 것으로 판단된다.
구축된 시뮬레이션 모형을 이용하여 교통량, 보행량, LPI지속시간, 교차로 운영형태를 변경하며 LPI 기법 적용의 효과에 대한 영향을 산정하였다. 구체적으로, 교통량의 경우 교통량이 증가함에 따라 상충횟수가 증가하는 것은 아닌 것으로 분석되었으며, 보행량이 많은 경우 상충횟수가 일반적으로 증가하고 LPI기법은 이러한 상충을 90% 이상 감소시킬 수 있으므로, 일반적으로 보행량이 많은 곳에서 더욱 큰 효과를 보이는 것으로 판단할 수 있다. 한편 LPI 지속시간의 경우 5초 이상에서 현저히 상충이 감소하는 것으로 분석되어 최소 5초로 설정하는 것이 바람직 한 것으로 판단되며, 안전측면에서는 7초가 가장 바람직한 것으로 분석되었다. 다만, LPI 지속시간을 길게 설정할수록 차량의 지체에는 악영향을 주므로 현장적용에 있어 이에 대한 균형을 유지하는 것이 필요한 것으로 판단된다. 교차로 기하구조의 경우 부도로의 차로수가 증가함에 따라 상충의 발생빈도가 증가하는 것으로 분석되었다.
광주광역시 주요교차로 중 LPI기법이 적용 가능한 교차로를 대상으로 차로운영형태에 따라 교차로 3개소를 선정하여 분석한 결과 모든 교차로에서 LPI기법 적용의 효과가 현저한 것으로 분석되었다. 특히 교차로가 비정형적인 형태를 가지고 있는 경우 LPI기법 적용 전 총 상충횟수가 125.2회 발생하여 가장 위험도가 높은 교차로로 분석되었다. 교차하는 두 도로가 직각을 이루고 있고 주도로 5차로와 부도로 3차로로 운영되고 있는 비교적 규모가 큰 교차로의 경우 시야가 상대적으로 많이 확보되고 우회전 차량이 상대적으로 보행자에 대처할 시간이 많아 상충횟수가 다른 교차로에 비해 현저히 적은 것으로 분석되었다. 따라서 실제 LPI기법 적용을 위해 현장에서 고려해야할 사항 중 차로수 규모에 따른 교차로의 형태와 함께 비정형의 정도 또한 고려하여야 할 것으로 판단된다.
본 연구에서 교차로 시뮬레이션 모형을 구축하는 과정에서 요구되는 다양한 모형의 파라미터들을 설정함에 있어 일반적인 값들이 적용되었으며, 상충횟수와 보행자의 이질적인 통행특성에 대하여 모형의 보정(Calibration) 과정이 생략되었다. 보다 현실적인 효과산정을 위해서는 현장조사를 통하여 시뮬레이션 모형에 요구되는 입력 자료들을 수집하고, 우회전 차량과 보행자간의 상충횟수와 상충의 특징을 수집하여 이를 모형에 반영하여야 할 것이다. 따라서 향후 연구에서는 이러한 사항들을 고려하여 실제 운영되고 있는 교차로에서의 보행자와 차량 간의 상충 자료를 수집하고 이를 심도 있게 분석하여야 할 것으로 판단된다.
