

서론
선행연구 고찰
1. 고령운전자 주행행태 분석 연구
2. 고령운전자의 주행행태를 고려한 고속도로 설계요소 개선방안 연구
3. 선행연구와의 차별성
연구방법론
1. 분석구간 설정
2. 시나리오 선정
3. 안전성 평가지표
4. 네트워크 정산
5. 고령운전자 차량거동 구현
결과분석
1. 고령운전자 비율에 따른 안전성 비교
2. 고령운전자 비율의 증가에 따른 구간별 안전성 평가지표 및 상충지점 비교
3. 고령운전자 비율별 가속차로 길이 적정성 평가
결론
향후 연구방향
서론
만 65세 이상의 고령운전자는 연령대가 낮은 신체적 능력의 저하로 인하여 시력이 저하하거나 일반운전자에 비해 운전 시 인지 ‧ 반응시간이 증가하고 복잡한 동시작업을 수행하는 경우에는 인지 ‧ 판단 ‧ 동작의 정확성이 저하하기 때문에 안전하고 수월한 운전이 불가하여 위험상황이 발생할 가능성이 있다(Ministry of Land Infrastructure and Transport, 2015). 최근 국내 교통사고 발생 건수는 대체적으로 감소하는 추세를 보이는 반면에 고령운전자 관련 교통사고 발생 건수는 증가하는 추세가 나타났다(Road Traffic Authority). 더불어 2013년에서 2018년까지 만 65세 이상 고령운전자의 운전면허소지자 비율이 증가하는 추세를 고려하면 고령운전자와 관련한 사고발생 건수는 더욱 증가할 전망이다(Road Traffic Authority). 이와 같이 고령운전자의 사고 발생 가능성이 높다는 점과 사고건수의 증가추세를 고려한다면 향후 도로설계 시 교통안전성 관점에서 고령운전자를 고려하여 도로설계를 계획할 필요가 있다. Jeon et al.(2018)은 고령운전자를 고려한 고속도로 개선방안을 제시하였으며 고속도로 유입연결로의 가속차로 길이를 증가시켜야 한다고 언급하였다. 고속도로 합류부는 합류 간격을 탐색하거나 속도를 조절하는 등 복잡한 과정이 필요한 구간이며 서로 다른 두 개의 교통류가 만나기 때문에 병목현상과 교통사고의 잠재적인 원인으로 여겨진다(Marczak et al., 2013; Chu, 2014). 가속차로는 고속으로 주행하는 본선 교통류와 본선보다 낮은 속도로 주행하는 연결로 교통류가 합류 시 교통류를 방해하지 않고 안전하게 가속하기 위해 설치하는 차로이다. 고령운전자는 일반운전자보다 인지 ‧ 반응시간이 증가하기 때문에 가속차로에서 본선으로 합류하는데에 더 많은 시간이 필요할 것이므로 고령운전자의 비율이 증가함에 따라 연결로에서 본선으로의 합류를 위해 가속차로 길이 연장이 요구된다. 따라서 고속도로 유입연결로 가속차로 길이의 연장이 필요할 것으로 예상한다.
본 연구의 목적은 고령운전자와 일반운전자의 상호작용을 교통안전성 관점에서 시뮬레이션을 통해 평가하고 고령화시대에 대비한 안전한 도로 설계가 가능하도록 개선방향을 제시하는 것이다. 고령운전자의 교통안전성을 평가하기 위해 고령운전자가 운전을 어려워하는 구간인 유입연결로 가속차로를 분석구간으로 선정하였다. 본 연구에서는 고령운전자 비율과 가속차로 길이를 시나리오 구성요소로 선정하였으며 2018년도의 고령운전자 운전면허소지자 비율을 고려하여 현재의 고령운전자 비율을 10%로 설정하였다. Ministry of Land Infrastructure and Transport(2013b)에서 제시한 고속도로 유입연결로 가속차로의 최소길이를 반영하여 기본 가속차로 길이는 340m로 설정하였다. 고령운전자의 주행행태를 미시교통시뮬레이션인 VISSIM에 반영하기 위해 VISSIM 내 주행행태 파라미터를 조정하여 안전성 평가지표는 선 ‧ 후행 차량간 후미추돌 상충률을 선정하였으며 미시교통시뮬레이션 수행으로 도출한 결과를 토대로 세 가지의 분석을 수행하였다. 첫 번째 분석은 기본 가속차로 길이인 340m에서 고령운전자 비율이 증가함에 따른 교통안전성의 변화를 분석한다. 두 번째 분석은 고령운전자 비율이 증가함에 따른 분석구간별 상충건수 및 상충지점을 비교한다. 마지막 분석에서는 고령운전자의 비율별로 교통안전성이 가장 높은 가속차로 길이를 선정하여 고령운전자의 비율별 적정 가속차로 길이를 도출한다.
본 연구의 구성은 다음과 같다. 2장에서는 고령운전자의 주행행태를 분석한 연구와 개선방안을 제시한 선행연구를 고찰한다. 3장에서는 본 연구의 연구방법론을 제시하였으며 분석구간, 시나리오 및 안전성 평가지표를 선정하고 네트워크 정산 및 고령운전자 차량의 거동 구현 방법을 설명한다. 4장에서는 시뮬레이션 수행 후 교통안전성 관점에서의 분석결과를 제시하였으며 5장에서는 결론 및 향후연구 방향을 제시하였다.
선행연구 고찰
본 연구는 고령운전자의 주행행태를 고려하여 교통안전성을 분석하고 고속도로 내에서 유입연결로 가속차로 구간의 교통환경 개선방향을 제시하는 것이 목적이다. 따라서 고령운전자의 주행행태를 분석한 연구와 고령운전자를 고려한 고속도로 개선방안을 제시한 선행연구를 대상으로 수행하였으며 기존연구와의 차별성을 제시하였다.
1. 고령운전자 주행행태 분석 연구
운전자의 연령대가 증가할수록 만성질환, 시력장애와 같은 신체적 저하로 인해 운전능력에 부정적인 영향을 미칠 수 있기 때문에 사고발생 가능성이 높으며 치명상 또는 중상 사고발생이 증가하는 것으로 나타났다(Evans, 1988; Zhang et al., 2000). 운전자의 연령대별로 주행행태를 분석한 결과 고령운전자는 다른 연령대와 비교하였을 때 상대적으로 공격적이지 않은 주행행태를 보이는 것으로 나타났다(Shinar and Compton, 2004). 선행차량을 추종하는 상황에서 고령운전자와 비고령운전자의 주행행태를 비교한 결과 고령운전자는 비고령운전자보다 평균 반응시간이 증가하고 비고령운전자보다 저속으로 주행하는 특성이 나타났다(Nishida, 1999; Isabelle and Simon, 2020). 고령운전자는 저속주행과 더불어 반응시간 또는 제동시간이 증가한다는 주행특성이 있어 돌발 상황 발생 시 비고령운전자보다 위험할 가능성이 있다(Isabelle and Simon, 2020). 이와 같이 고령운전자가 비고령운전자에 비해 천천히 주행하는 경향으로 인해 짧은 가속차로에서 본선으로의 진입을 어려워한다는 특성이 있는 것으로 나타났다(Waard et al., 2009; Lwambagaza, 2016). 가속차로 구간에서 유입연결로를 주행하는 차량이 본선에 합류하는 지점을 연령대와 서비스 수준에 따라 분석한 연구에 따르면 고령운전자는 서비스 수준이 E수준에 가까울수록 가속차로가 종료되는 구간에서 가장 많은 합류가 발생한다(Lwambagaza et al., 2017). 중년운전자(41-55세)와 고령운전자(65세 이상)를 대상으로 교통사고 자료를 분석한 결과 고령운전자는 다양한 사고 유형 중 차량 간 사고가 가장 빈번하게 발생하고 중년운전자에 비해 고속(70km/h 이상)으로 주행하는 운전자의 비율이 적은 편으로 나타났다(Koppel et al., 2011). Bélanger et al.(2010)은 주행 시뮬레이터를 이용한 실험에서 추월 차량이 피실험자의 차량 앞을 추월하는 이벤트 시나리오를 고령운전자가 주행하도록 하였으며 고령운전자는 추월 차량을 신속하게 회피를 하기위해 짧은 시간 내에 판단 및 행동을 수행해야 했으나 제동이 수월하지 않은 것으로 나타났다. 이는 고령운전자에게 동시다발적인 정보 처리 및 회피 행동이 어려운 것임을 나타낸다(Bélanger et al., 2010).
2. 고령운전자의 주행행태를 고려한 고속도로 설계요소 개선방안 연구
Korea Expressway Corporation(2014)은 고령화 대비를 위한 고속도로 운영 진단 및 개선과 관련한 연구에서 고속도로 전체구간 중 개선이 시급한 구간을 순위별로 선정한 결과 고속도로 내 IC진입부를 개선이 시급한 구간 1순위로 선정하였다. IC진입부의 서비스 개선항목으로는 노면표시 간격 및 수 조정, 특정 상황에 대한 정보 제공 등의 여러 항목을 제시하였으며 이 중 설계속도별 가속차로 길이 기준 증대, 가속차로 테이퍼 길이 확대를 서비스 개선항목 1순위로 선정하였다(Korea Expressway Corporation, 2014). 주행시뮬레이션 실험을 통해 고령운전자 특성을 분석한 연구는 비고령운전자 및 고령운전자의 IC진입부(합류부)에서 합류하는데 소요되는 시간을 비교하였다. 비교 결과 비고령운전자는 5초의 소요 시간이 나타났으나 비고령운전자는 일반운전자의 2배인 10초의 소요 시간이 요구되었으며 합류 소요 거리의 경우 고령운전자는 비고령운전자의 소요 거리보다 약 50% 증가한 거리가 요구되었다. 이에 따라 IC진입부 구간에 대한 개선방안으로 가속차로 진입 전 주의 정보 제공 등을 제시하였으며 우선순위를 선정한 결과 가속차로 및 테이퍼 길이를 확대하는 방안이 1순위로 선정되었다(Jeon et al., 2018). 주행시뮬레이터를 이용하여 안전성에 영향을 미치는 요인들을 분석한 선행연구 결과에 따르면 가속차로의 길이를 연장함으로써 고령운전자의 작업부하를 감소시키고 안전성에 긍정적인 영향을 미친다는 결과를 도출하였다(Waard et al., 2009).
3. 선행연구와의 차별성
선행연구는 고령운전자의 인지 ‧ 반응시간, 주행속도와 같은 주행행태나 운전자 특성을 분석하고 일반운전자와 비교분석하는 것이 주된 연구였으나 본 연구는 고령운전자 차량을 미시교통시뮬레이션인 VISSIM에서 구현하고 고령운전자 비율과 가속차로 길이를 다양화하여 교통안전성을 분석하였다. 또한 선행연구는 고속도로 가속차로 길이의 증대 필요성만을 언급하였으나 본 연구는 고령운전자 비율에 따른 적정 가속차로 길이를 도출함으로써 구체적인 개선방향을 제시하였다. 더불어 자율주행 차량의 상용화가 기대되고 있으나 자율주행 차량의 상용화를 통한 교통시스템의 향상을 위해서는 법규 및 제도의 마련이 필요하며 이를 위해서는 현재 고속도로를 이용하는 운전자(고령운전자, 비고령운전자 등)의 다양한 주행행태를 고려할 필요가 있다. 그러나 국내 고속도로를 대상으로 다양한 운전자의 주행특성을 고려한 연구가 미미한 실정이므로 본 연구의 연구결과가 기초연구가 될 수 있다는 점에서 본 연구의 필요성과 선행연구와의 차별성이 있다. 또한 재정적 부담감, 자율주행 차량 기술에 대한 신뢰성 부족 등으로 인하여 상용화 초기부터 자율주행 차량에 대한 구매가 급증하지 않을 수 있으나 고령운전자 비율은 매년 증가하는 추세이다. 따라서 고령운전자의 운전행태를 고려한 교통류 안전성을 연구할 필요성이 있으며 이를 바탕으로 자율주행 차량 도입 시 자율주행 차량을 고령운전자에게 우선 확대시키는 등의 제도마련을 위한 기초연구가 될 수 있다.
연구방법론
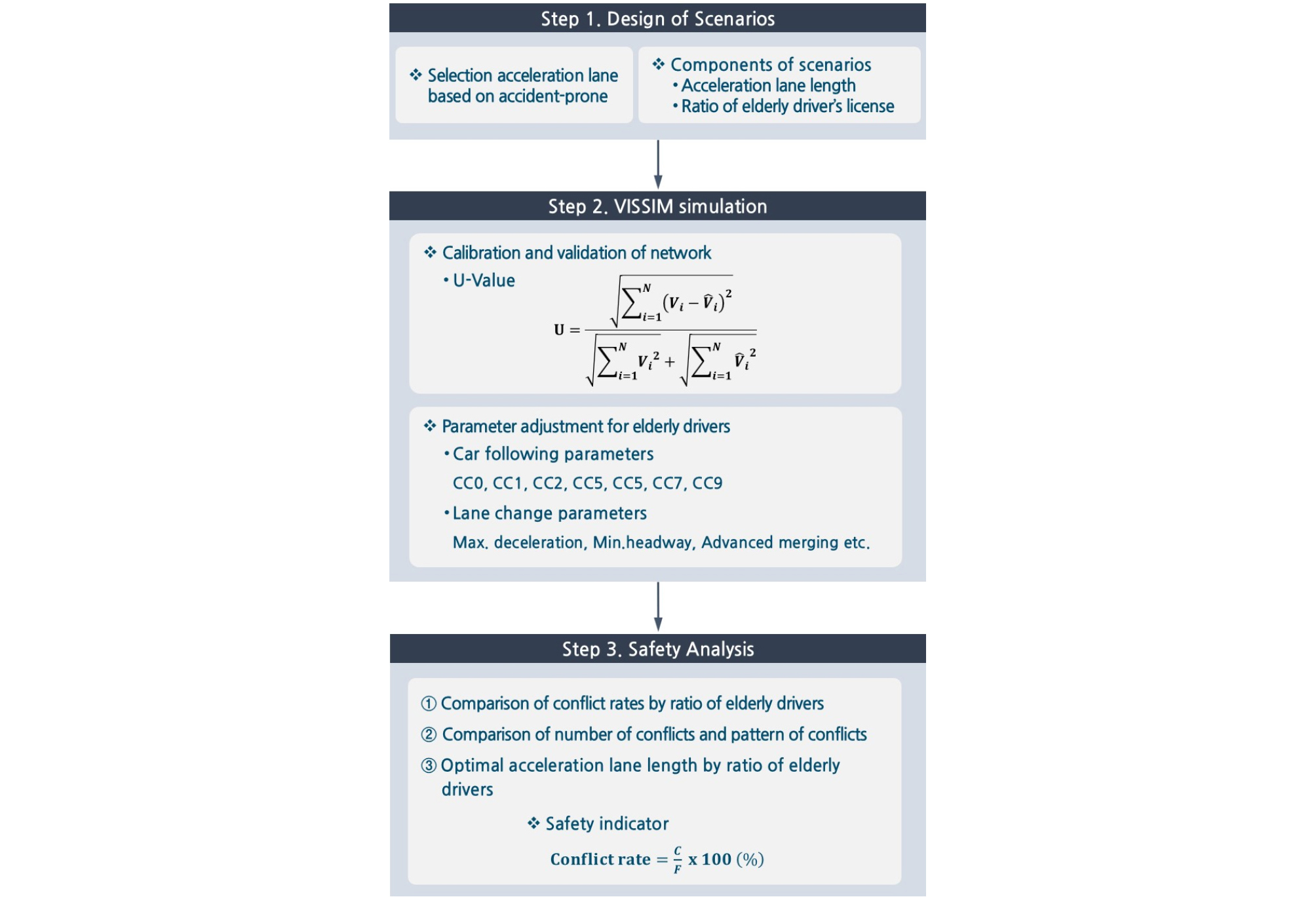
연구방법론을 포함한 전체적인 연구의 흐름도는 Figure 1에 제시하였다. Step 1은 연구수행을 위한 시나리오를 선정하는 과정으로 사고다발구간을 기반으로 분석구간을 선정하며 가속차로 길이 및 고령운전자 비율을 이용하여 시뮬레이션 시나리오를 선정한다. Step 2는 네트워크의 정산 및 파라미터를 조정하는 과정으로 VISSIM으로 구현한 네트워크를 U-Value를 이용하여 검증한 후 차량 추종 파라미터와 차로변경 파라미터의 조정을 통해 고령운전자의 주행행태를 반영한다. Step 3은 시뮬레이션 수행으로 수집한 개별차량 주행궤적 자료를 이용하여 안전성을 분석하며 총 세가지 분석을 수행한다. 첫 번째 분석에서는 고령운전자 비율에 따른 상충률을 비교하고, 두 번째 분석에서는 고령운전자 비율의 증가에 따른 상충건수 및 상충지점을 비교한다. 마지막 분석에서는 고령운전자 비율별로 적정 가속차로 길이를 도출하기 위한 분석을 수행한다.
1. 분석구간 설정
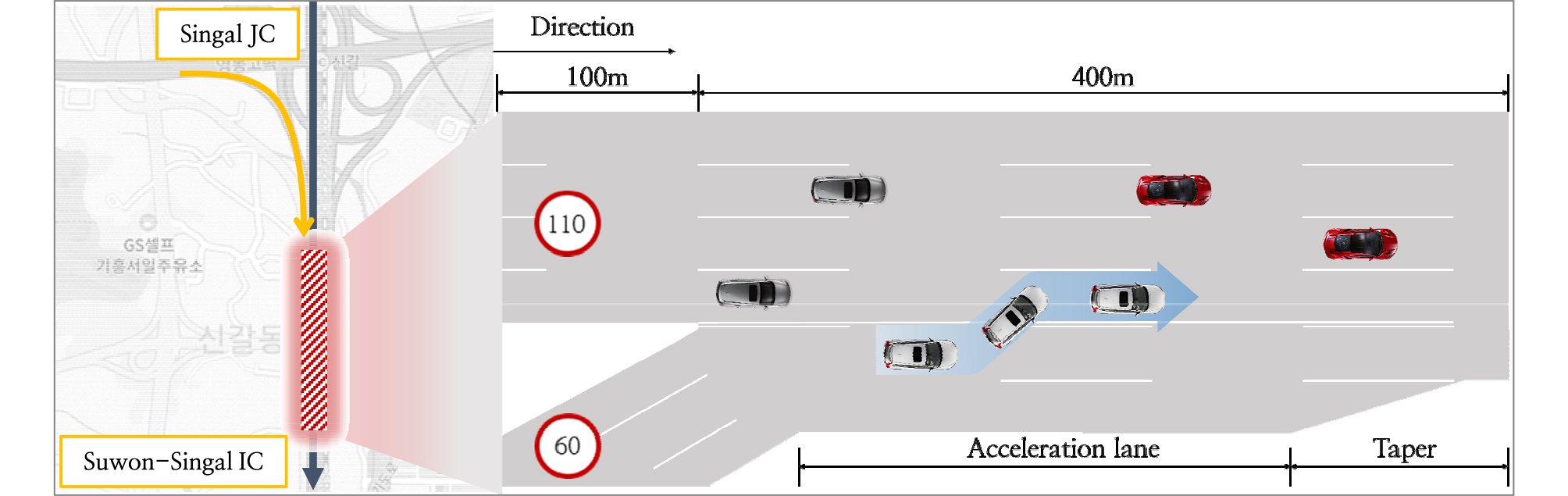
2013-2017년의 교통사고 자료를 이용하여 경부고속도로 내에서 안전성 개선효과를 효과적으로 나타낼 수 있는 사고다발구간을 선정하기 위하여 사고발생 빈도가 높고 상습적인 지 ‧ 정체가 발생하는 구간을 분석하였다. 분석결과 경부선(부산방향)의 기흥동탄 I.C에서 양재 I.C(약 10km) 구간이 사고다발구간으로 선정되었으며 이 중 신갈JC-수원신갈IC 구간에서 영동고속도로에서 경부고속도로 방향으로 향하는 유입연결로 가속차로를 분석 대상구간으로 설정하였다. 가속차로 구간의 안전성을 평가하기 위해 고속도로 유입연결로의 영향권 500m를 안전성 분석구간으로 설정하여 Figure 2에 제시하였으며 버스전용차로인 1차로는 분석구간에서 제외하였다(Ministry of Land Infrastructure and Transport, 2013a). 미시교통시뮬레이션인 VISSIM에 네트워크를 구축하였으며 교통환경을 개선하기 위해 교통량과 차종별 비율을 반영하였다. 교통량이 가장 많은 시간대인 첨두 시(오전 7-9시)를 고려하여 본선 5,400대/시, 연결로 500대/시를 유입교통량으로 반영하였다. 차종은 승용차(71.3%), 버스(15.4%), 화물차(13.3%)를 설정하였으며 고령운전자의 차종은 승용차만을 고려하였다. KoROAD(2018)에서 정의하는 고령운전자 연령 기준을 반영하여 본 연구에서도 만 65세 이상을 고령운전자로 정의하였다. 정의된 고령운전자의 연령을 고려하면 버스 및 화물차를 운전하는 직종에 종사하는 고령운전자 비율은 현저히 낮을 것으로 예측하기 때문에 승용차만을 고려하였다. 분석대상 고속도로 구간에서는 첨두 시 갓길차로제가 운영되기 때문에 본 연구에서 네트워크 구축 및 시뮬레이션 수행 시 갓길차로제를 반영하였다. 다만 본 연구의 안전성 분석구간인 유입연결로 영향권(하류부 400m, 상류부 100m)에서는 갓길차로제가 운영되지 않기 때문에 이를 반영하여 분석구간을 나타내는 Figure 2에서는 갓길을 표현하지 않았다. 또한 해당 고속도로는 차단봉으로 본선과 유입연결로를 차단하고 있어 가속차로에서 본선으로의 진입을 위해서는 가속차로 종점 부분에서만 차로변경이 가능하다. 그러나 본 연구에서는 실제 고속도로와 동일하게 차단봉을 네트워크에 반영하는 경우, 가속차로에서 본선으로 진입하는 차량의 일반적인 상황을 대표할 수 없기 때문에 차단봉을 고려하는 대신 점선 및 실선을 고려하여 네트워크를 구축하였다.
2. 시나리오 선정
고령운전자 비율에 따른 교통안전성의 변화와 고령운전자 비율별 적정 가속차로 길이를 도출하기 위해 고령운전자 비율과 가속차로 길이를 시나리오 구성요소로 고려하였다. 고령운전자는 일반운전자보다 인지 ‧ 반응시간이 증가하고 정확성이 저하하기 때문에 가속차로에서 안전한 차로변경을 위해 요구되는 거리는 일반운전자보다 증가할 것이기 때문에 가속차로 길이를 고려하였다. Ministry of Land Infrastructure and Transport(2013b)에서 유입연결로가 2차로인 경우 가속차로의 최소길이를 342m로 제시하였으며 본 연구에서는 분석의 편의성을 위해 340m를 기본 가속차로 길이로 설정하였다. 유입연결로를 주행하는 차량의 주행속도를 60km/h로 가정하면 진입차량은 1초 당 약 16.67m를 주행하므로 기본 가속차로 길이인 340m부터 15m 단위로 증가시켜 415m까지 6개의 시나리오를 설정하였다. 2018년 고령운전자 비율이 9.63%임을 고려하여 10%를 현재의 고령운전자 비율로 가정하였다. 2014년부터 2018년까지 5년간 2.51%가 증가한 고령운전자 비율의 증가추세와 동일한 추세를 고려한다면 20년 후에 약 10%가 증가할 전망이다(Road Traffic Authority). 따라서 고령운전자 비율별 교통안전성의 변화를 분석하기 위해 현재 고령운전자 비율 10%부터 향후 20년 뒤 도달할 것으로 예측되는 20%까지 2% 단위로 증가시킨 6개의 시나리오를 설정하였다. 고령운전자 비율과 가속차로 길이를 고려한 총 시나리오의 개수는 36개이며 Table 1에 제시하였다. 각 시나리오마다 20회씩 반복 수행하였으며 반복 수행을 하는 동안 난수(Random seed)는 모두 다르게 설정하였다.
Table 1.
Study scenarios
| Scenario | |
| Acceleration length | Ratio of elderly driver |
| 340m | 10-20% |
| 355m | 10-20% |
| 370m | 10-20% |
| 385m | 10-20% |
| 400m | 10-20% |
| 415m | 10-20% |
| Total number of scenario | 36 |
3. 안전성 평가지표
상충은 같은 시공간에서 서로 접근하는 두 개 혹은 그 이상의 도로 사용자가 움직임을 변화시키지 않는다고 가정할 때 충돌할 위험이 관측되는 상황을 의미한다. 교통류의 교차, 합류 및 분류현상이 발생하며 가속차로의 특성상 차로변경을 수행하는 차량이 다수 존재하며 차로변경 중에 사고가 발생한 차량의 주요 사고유형을 조사하기 위하여 5년(2013-2017년)간 고속도로에서 발생한 교통사고 자료를 분석하였다. 가속차로의 특성상 차로변경을 수행하는 차량이 다수 존재하며 차로변경 중에 사고가 발생한 차량의 주요 사고유형을 조사하기 위하여 5년(2013-2017년)간 고속도로에서 발생한 교통사고 자료를 분석하였다. 교통사고 자료를 통해 사고발생 직전 차량조작 상태가 차로변경인 차량을 차로변경 중인 차량으로 간주하여 발생한 사고유형을 분석하였다. 분석 결과, 경부고속도로에서 발생한 사고 중 사고직전 차량조작 상태가 차로변경인 차량의 사고건수는 총 229건이며 이 중 측면충돌(Angle) 사고가 발생한 차량은 60건, 후미추돌(Rear-end) 사고가 발생한 차량은 169건으로 나타나 후미추돌 사고는 측면충돌 사고보다 약 2.82배 더 많은 사고가 발생하였다. 또한 전국 고속도로의 가속차로를 대상으로 사고직전 차량조작 상태가 차로변경인 차량의 사고건수는 총 9건으로 이 중 후미추돌 사고가 7건, 측면충돌 사고와 정면충돌 사고가 각각 1건으로 나타났다. 사고자료를 분석한 결과 고속도로에서 사고직전 조작 상태가 차로변경인 차량의 최다 발생 사고유형은 후미추돌 사고인 것으로 나타났으며 본 연구에서는 후미추돌 상충을 대표적인 상충유형으로 가정하여 후미추돌 상충을 안전성 평가지표로 선정하였다. Lee et al.(2018)은 선 ‧ 후행 차량 간 안전거리(Safety distance, SD)와 추종거리(Follow distance, FD)를 이용하여 상충판단조건을 정의하였으며 VISSIM 시뮬레이션 수행을 통해 수집한 개별차량 주행궤적자료로부터 개별차량의 추종거리와 안전거리 정보의 수집이 가능하다. 추종이벤트()는 개별차량 주행궤적 자료에서 후행차량과 선행차량 정보가 나타난 상황을 추종이벤트로 선정하였다. 추종거리는 주행 중인 선 ‧ 후행 차량 간의 거리이고 안전거리는 VISSIM 내 차량 추종 파라미터(Car following parameters)의 CC0(m)과 CC1(s) 그리고 차량의 주행속도를 이용하여 계산되며 VISSIM에서 제시하는 수식을 Equation 1에 제시하였다(PTV VISSIM 7 User Manual, 2015). CC0은 대기행렬에서 정지하는 경우 선 ‧ 후행 차량 간의 거리이며 CC1은 선행차량과 후행차량 간의 차두시간이다. VISSIM 시뮬레이션으로부터 수집한 개별차량 주행궤적 자료로부터 상충판단방법의 정의, 상충건수 및 추종건수 집계, 상충률 계산을 위한 수식은 Lee et al.(2018)에서 참고하였다. 상충판단방법은 개별차량 주행궤적 자료로부터 수집한 선 ‧ 후행 차량 간 안전거리가 추종거리보다 긴 경우를 상충으로 판단하며 이에 대한 수식은 Equation 2에 상충의 구상도는 Figure 3에 제시하였다. Equation 3은 상충건수를 계산하는 수식으로 총 분석시간()동안 주행한 모든 차량()에 대하여 상충건수를 집계하였다. 추종건수는 총 분석시간동안 주행한 모든 차량에 대하여 추종 이벤트()가 발생한 경우를 집계하였으며 수식은 Equation 4에 제시하였다. 안전성을 평가하기 위한 지표로 선 ‧ 후행 차량 간 상호작용 건수 대비 후미추돌 상충건수를 의미하는 상충률(Conflict rate, CR)을 선정하였으며 수식은 Equation 5와 같이 정의하였다.
| $$SD=CC0+CC1\times v$$ | (1) |
| $$Conflict\;determination=\left\{\begin{array}{l}conflict,\;\;\;\;\;\;\;\;\;\;SD\geq FD\\non\;conflict,\;\;SD<FD\end{array}\right.$$ | (2) |
| $$C=\sum_{k=1}^t\sum_{j=1}^Nm(SD_{kj}\geq FD_{kj})$$ | (3) |
| $$F=\sum_{k=1}^t\sum_{j=1}^Nm(f_{kj})$$ | (4) |
| $$CR=\left(\frac CF\right)\times100(\%)$$ | (5) |
여기서, : Safety distance (m)
: Follow distance (m)
: Speed of vehicles (km/h)
: Number of conflict
: Number of interaction
: Following event
: Conflict rate (%)
: Standstill distance (m)
: Headway time (s)
: Simulation time (s)
: Number of cars
: Analysis period (s)
: Total number of vehicles
: Count

4. 네트워크 정산
정산은 네트워크를 실제 교통흐름과 유사하도록 파라미터를 조정하는 것을 의미하며 실제 도로를 VISSIM에 구현하는 경우 정산 및 검증을 수행하여야 한다. 본 연구에서는 Jo et al.(2019)에서 정산한 네트워크를 이용하여 연구를 수행하였다. 정산 수행 구간은 C-ITS 실증사업 구간 중 사고다발 구간인 경부고속도로의 신갈JC에서 기흥IC 부근(약 10km)을 선정하였다. 실제 교통흐름과 유사하게 구현하기 위하여 네트워크를 구축 시 VDS 검지기 위치와 동일한 위치에 검지기를 설치하고 정산을 수행하였으며 검지기 위치는 Figure 4에 제시하였다. 정산 이후 4개의 검지기로부터 첨두 시 5분 단위로 수집된 자료와 시뮬레이션 자료를 비교하여 검증을 수행하였다. 속도를 효과척도로 사용하는 U-Value를 활용하여 검증을 수행하였고 U-Value가 0.1 이하의 값으로 도출되는 경우 실제 데이터와 일치한다고 판단하며 U-Value의 수식은 Equation 6에 제시하였다. 10회의 시뮬레이션 수행 이후 검지기별 관측된 U-Value 값과 평균 U-Value를 도출한 결과는 Table 2에 제시하였으며, 검증 결과 U-Value는 모두 0.1 이하의 값이 도출되었으므로 네트워크상의 도로가 실제 도로를 반영했다고 판단한다(Jo et al., 2019).
| (6) |
여기서, : Actual speed (km/h)
: Simulation speed (km/h)
: Simulation time step

Table 2.
Comparison of u-values between field and simulation loop detector data
5. 고령운전자 차량거동 구현
고령운전자의 주행행태가 반영된 차량을 VISSIM에 구현하기 위해서는 주행행태 파라미터 값의 조정이 필요하다. Lwambagaza(2016)는 현장자료와 시뮬레이션 자료를 비교하는 효과척도로 연결로 교통류와 평균 속도를 설정하여 VISSIM 파라미터의 조정 및 정산을 수행하였다. 현장자료와 VISSIM 시뮬레이션 자료로부터 수집한 평균 속도를 운전자의 연령대별로 비교한 결과, 연령대가 높아질수록 평균 주행 속도는 감소하는 경향이 있어 고령운전자가 가장 낮은 속도로 주행하였으며 젊은 운전자보다 약 4.1-12.07km/h의 주행속도가 낮아졌다. 이러한 고령운전자 주행행태를 VISSIM에 반영하기 위해 차량 추종 파라미터(Car following parameters)와 차로변경 파라미터(Lane change parameters)를 조정하였으며 구체적인 조정 결과는 Table 3과 Table 4에 제시하였으며 본 연구에서는 기존 연구에서 제시한 파라미터를 그대로 차용하였다. 고령운전자가 젊은 운전자에 비해 낮은 속도로 주행한다는 특성을 반영하기 위하여 차량 추종 파라미터 중 속도 관련 파라미터(CC4, CC5, CC7, CC9)를 기본 값(Default Values)보다 하향 조정하였다. 또한 고령운전자와 젊은 운전자의 임계차간시간을 비교한 결과, 연결로 교통류에서 본선 교통류로 합류를 하기 위한 임계차간시간은 젊은 운전자보다 약 0.4초에서 2.1초 가량 증가하였다. 이러한 주행특성을 반영하기 위해 차량 추종 파라미터 중 거리(m)와 관련한 파라미터인 CC0를 하향 조정, CC1과 CC2를 상향 조정하였으며 차로변경 파라미터 중 Accepted deceleration, Minimum headway, Safety distance reduction factor를 기본 값보다 상향 조정하였다. Elderly에 해당하는 파라미터 값을 고령운전자 주행행태 파라미터로 가정하였으며 고령운전자 이외의 차량은 모두 VISSIM 내 기본 값을 적용하였다.
Table 3.
Car following parameters for elderly drivers
Table 4.
Lane change parameters for elderly drivers
결과분석
1. 고령운전자 비율에 따른 안전성 비교
기본 가속차로 길이인 340m에서 고령운전자 비율을 10%부터 20%까지 2% 단위로 증가시켜 시뮬레이션을 20회 반복하여 수행하였고 개별차량 주행궤적 자료를 수집하였다. 각 시나리오 당 수집한 20개의 데이터 중 10개의 시뮬레이션 데이터를 무작위 추출하여 얻은 상충률의 중앙값을 분석하였다. 10개의 상충률 중 최대 ‧ 최소값 또는 이상치와 같은 극단적인 값의 영향을 최소화하기 위하여 중앙값을 사용하였으며 이에 대한 결과를 Figure 5에 제시하였다. 분석 결과 현재 고령운전자 비율로 가정한 10%에서 가장 낮은 상충률이 나타났으며 고령운전자 비율이 증가할수록 상충률이 증가하는 추세가 나타났다. 고령운전자 비율에 따른 평균 상충률의 차이가 통계적으로 유의한 차이를 나타내는지 분석하기 위해 ANOVA 검정을 수행하였으며 수행결과는 Table 5에 제시하였다. 분산의 동질성 검정 결과 유의확률이 0.262로 유의수준인 0.05 이상이므로 분산의 동질성을 가정하여 ANOVA 검정이 가능하다. ANOVA 검정 결과 유의확률이 0.003으로 유의수준인 0.05 이하이므로 상충률은 95%의 신뢰수준에서 통계적으로 유의한 차이가 있는 것으로 나타났으며 이는 기본 가속차로 길이에서 고령운전자 비율에 따른 상충률의 차이가 존재함을 의미한다. 따라서 기본 가속차로 길이인 340m에서 고령운전자의 비율이 증가함에 따라 상충률이 증가하므로 향후 고령운전자의 증가추세를 고려한다면 교통안전성이 저하될 것으로 예상된다.
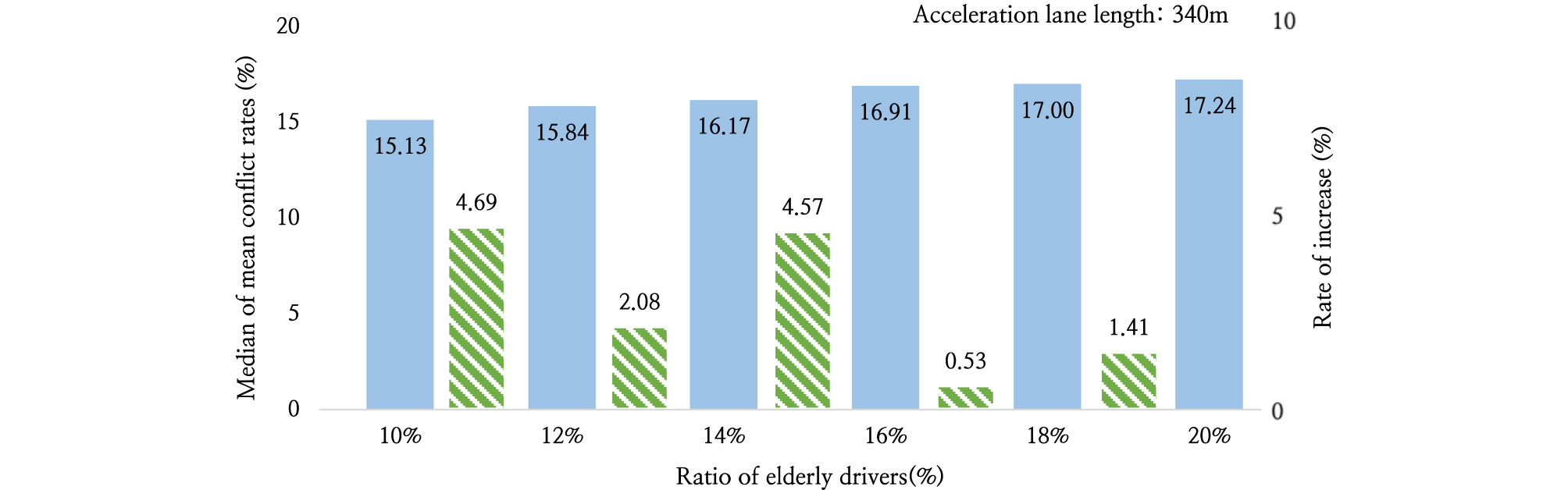
Table 5.
Results of ANOVA analysis
2. 고령운전자 비율의 증가에 따른 구간별 안전성 평가지표 및 상충지점 비교
VISSIM 시뮬레이션을 통해 수집한 개별차량 주행궤적 자료로부터 가속차로 분석구간인 유입연결로 영향권에서의 상충건수의 변화를 분석하였으며 이에 대한 분석 결과는 Figure 6과 Figure 7에 제시하였다. 네트워크 위에 표시된 노란색 점은 네트워크의 해당 지점에서 상충이 발생하였음을 의미한다. 고령운전자 비율이 10%인 경우 분석구간 내에서 총 상충건수는 156건이 발생하고 고령운전자 비율이 20%인 경우 총 상충건수는 300건이 발생하여 10%대비 약 48%의 상충건수가 증가하였다. 구간별로 상충건수의 변화를 분석하기 위하여 분석구간 길이인 500m를 100m씩 5개의 구간으로 구분하였다. 고령운전자 비율이 10%인 경우 연결로 교통류와 본선 교통류의 합류가 이루어지지 않은 1구간에서 최다 상충건수가 발생하였으나 고령운전자 비율이 20%로 증가한 경우 연결로 교통류와 본선 교통류의 합류가 시작되는 2구간에서 최다 상충건수가 발생하였다. 총 상충건수가 증가함에도 연결로와 본선의 접속이 이루어지지 않은 1구간의 상충건수는 오히려 감소하였다. 1구간을 제외한 유입연결로의 합류 이후 구간인 2-5구간의 상충건수는 모두 증가하여 상충발생 지점이 가속차로의 하류부 방향(2-5구간)으로 이동하는 양상이 나타났다. 2-5구간의 10% 대비 상충건수 증가율을 분석한 결과 2구간의 증가율은 약 1.02배, 3구간의 증가율은 약 2.44배, 4구간의 증가율은 약 8.6배, 5구간의 증가율은 약 0.61배 증가하였다. 2-5구간 중 변이구간을 제외한 가속차로가 존재하는 2-4구간의 상충건수 증가율이 높은 것으로 나타났다. 이는 일반운전자에 비해 인지 ‧ 반응 능력이 저하된 고령운전자의 특성상 가속차로 내에서 차로변경을 위해 소요되는 시간 및 주행거리가 증가함에 따라 가속차로 내 차량의 밀도가 증가하기 때문에 가속차로 내에 있는 차량들의 차로변경 위치가 상류부보다 하류부에서 많이 발생한 것으로 나타났다. 1-5구간별 상충건수 차이의 통계적 유의성 여부를 분석하기 위하여 ANOVA 검정을 수행하였으며 이를 Table 6에 제시하였다. 분산의 동질성 검정 결과, 고령운전자이 비율 10%, 20%인 경우 모두 유의확률이 0.017로 나타났으며 이는 유의수준인 0.05 이하이므로 로버스트검정을 수행하여야 한다. 로버스트검정 결과, 고령운전자 비율이 10%인 경우 유의확률이 0.000, 20%인 경우 유의확률이 0.009로 나타나 유의수준인 0.05 이하이므로 각 구간별 상충건수의 차이가 통계적으로 유의미한 것으로 나타났다. 또한 1-5구간별 고령운전자 비율에 따른 상충건수 차이의 통계적 유의성을 분석하기 위하여 T-검정을 수행하였으며 이를 Table 7에 제시하였다. 등분산 검정 결과, 1, 3, 4, 5구간은 유의확률이 유의수준 0.05 이하이므로 등분산을 가정하지 않으며 2구간은 유의확률이 유의수준 이상이므로 등분산을 가정한다. T-검정 결과, 1-5구간은 모두 유의확률이 유의수준 0.05 이하이므로 고령운전자 비율에 따라 구간별 상충건수의 차이가 통계적 유의성이 있는 것으로 나타났다. 또한 상충심각도를 비교하기 위하여 각 구간별 Delta S를 상충심각도를 나타낼 평가지표로 선정하였다. Delta S는 상충 상황에서 선 ‧ 후행차량의 속도 차이며 Delta S의 값이 증가할수록 상충심각도가 증가한다. Table 8에 각 구간별 평균 Delta S를 나타내었으며 분석 결과, 1-5구간 모두 고령운전자 비율이 10%에서 20%로 증가함에 따라 상충심각도가 증가하였다. 따라서 고속도로 유입연결로 가속차로에서 고령운전자 비율의 증가추세로 인하여 저하하는 교통안전성에 대비하기 위해서는 가속차로 길이를 연장할 필요성이 있다.
| $$Delta\;S=\vert V_f-V_L\vert$$ | (7) |
여기서, : Speed of following car (km/h)
: Speed of leading car (km/h)
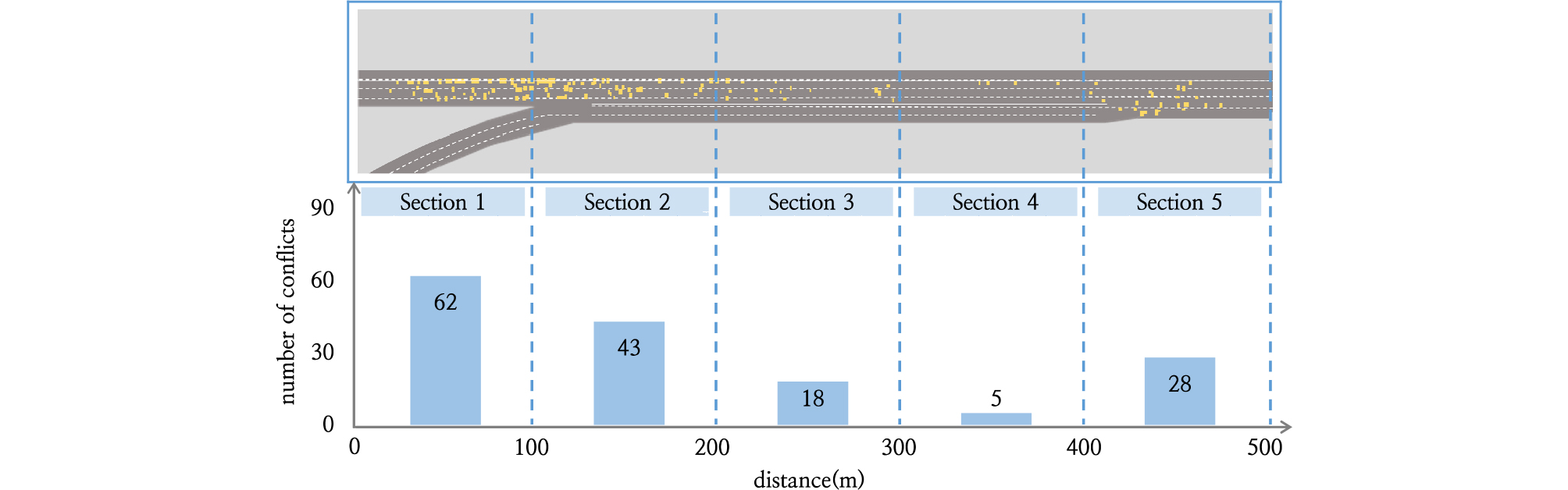
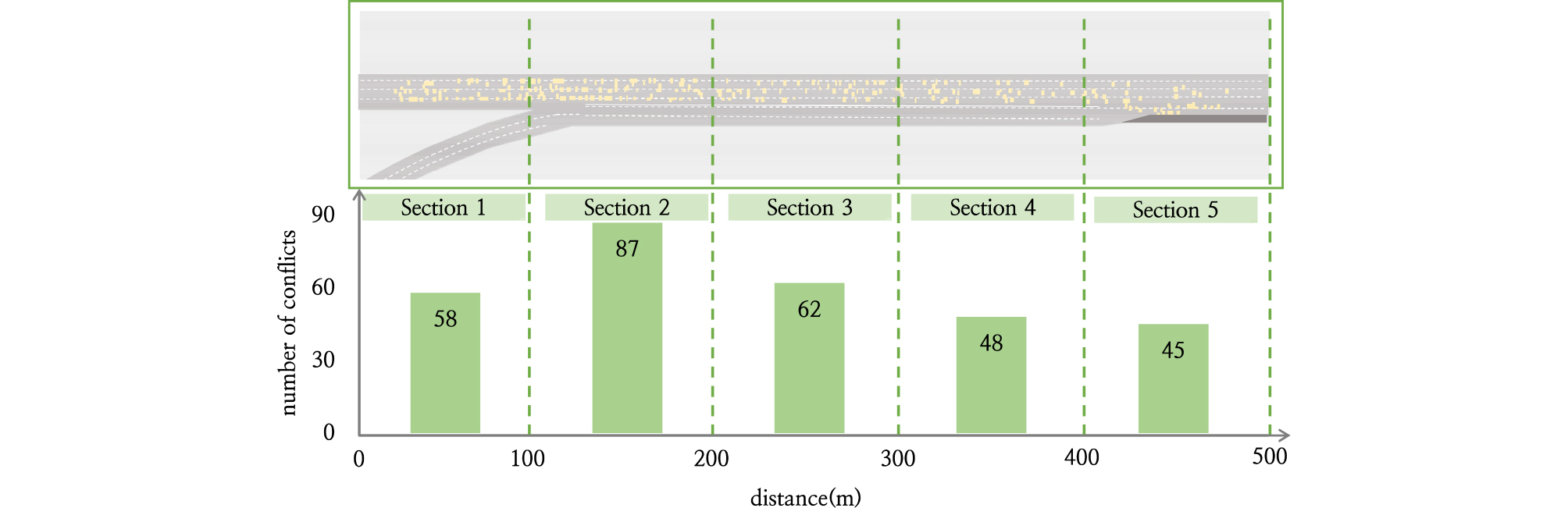
Table 6.
Results of ANOVA analysis
Table 7.
Results of T-test analysis
Table 8.
Comparison of conflict severity by each section
|
Ratio of elderly driver | Average of delta S | |||||
| Section 1 | Section 2 | Section 3 | Section 4 | Section 5 | All section | |
| 10% | 4.98 | 5.84 | 4.99 | 5.28 | 4.37 | 5.09 |
| 20% | 5.41 | 6.24 | 6.15 | 6.88 | 4.93 | 5.92 |
3. 고령운전자 비율별 가속차로 길이 적정성 평가
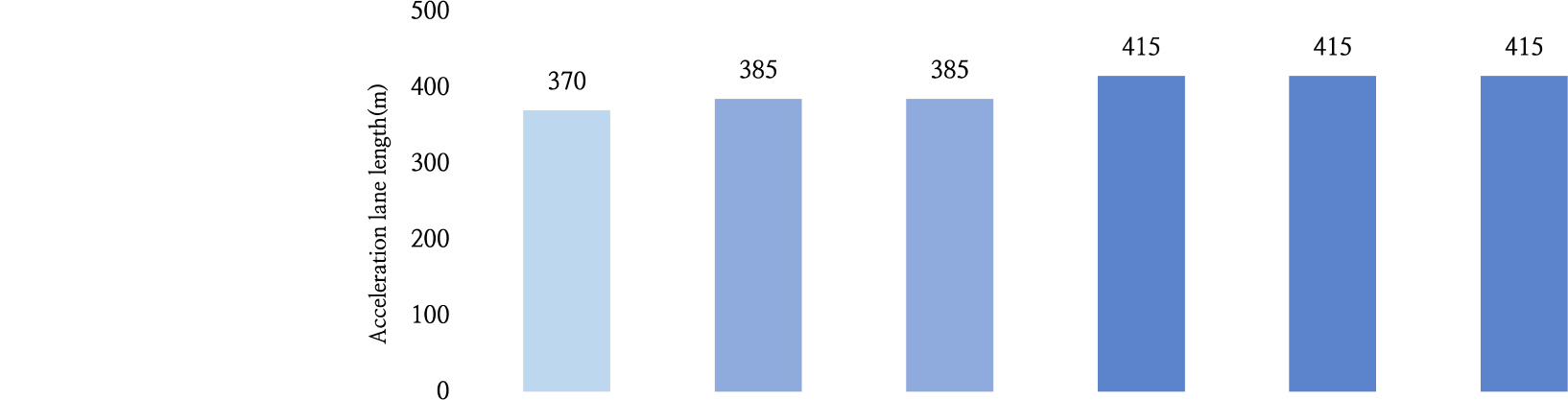
고령운전자의 비율별 적정 가속차로 길이를 도출하기 위해 고령운전자 비율 및 가속차로 길이별로 시뮬레이션 분석을 수행하였다. 결과분석 시 평균 상충률을 이용하여 분석하였으나 최소값 또는 최댓값과 같은 극단값으로 인하여 분석결과가 왜곡된 것으로 판단하였으며 극단적인 값으로 인한 왜곡을 최소화하기 위하여 중앙값을 이용하였다. 적정 가속차로 길이는 시나리오마다 도출되는 상충률의 중앙값이 최소로 나타나는 길이를 적정 가속차로 길이로 선정하였으며 Table 9에 제시하였다. 현재 고령운전자 비율로 가정한 10%에서는 가속차로 길이가 370m일 때 15.51%의 상충률 중앙값이 최소값으로 나타났으며 이는 기본 가속차로 길이인 340m보다 약 30m 증가한 길이이다. 고령운전자 비율이 12, 14%인 경우 각 비율의 최소 상충률 중앙값은 15.74% 15.90%이며 적정 가속차로 길이는 385m로 도출하였다. 고령운전자 비율이 16, 18, 20%인 경우 각 비율의 최소 상충률 중앙값은 16.09%, 16.08%, 16.28%가 나타났으며 시나리오로 설정한 가속차로 길이 중 최대 길이인 415m를 적정 가속차로 길이로 도출하였다. 따라서 고령운전자 비율이 증가함에 따라 최소로 나타나는 상충률 중앙값이 증가하는 추세를 보이며 적정 가속차로 길이 또한 증가하는 추세가 나타났다.
결론
전체 교통사고 건수는 감소하는 추세인 반면에 고령운전자와 관련한 사고발생 건수는 증가추세를 나타내고 있으며 고령자의 운전면허소지자 비율 또한 증가추세이기 때문에 고령운전자와 관련한 사고발생 건수는 더욱 증가할 전망이다. 따라서 고령운전자의 증가추세를 고려하여 교통안전성을 분석하고 교통환경을 개선할 필요성이 있다. 고령운전자는 신체적 능력의 저하로 인해 일반운전자보다 인지 ‧ 반응시간과 제동거리가 증가하며 저속으로 주행하는 주행특성이 있다. 고령운전자는 일반운전자보다 상대적으로 인지 ‧ 반응시간이 증가하기 때문에 고령운전자가 고속도로 유입연결로 가속차로에서 본선으로의 안전한 합류를 하기 위해서는 기본 가속차로 길이보다 증가된 거리가 요구된다. 따라서 고령운전자의 주행행태를 미시교통시뮬레이션인 VISSIM에 반영하여 교통안전성 관점에서 고령운전자 비율별 가속차로 길이의 적정성을 평가하기 위해 총 세가지 분석을 수행하였다.
첫 번째 분석에서는 고령운전자 비율에 따른 상충률의 변화를 분석하였다. 기본 가속차로 길이인 340m에서 고령운전자 비율이 증가할수록 상충률이 증가하는 추세가 나타났다. 이는 기본 가속차로 길이에서 향후 고령운전자 비율이 증가함에 따라 교통안전성이 저하될 것으로 나타난다. 두 번째 분석에서는 고령운전자 비율이 10%에서 20%로 변화함에 따른 상충건수, 상충심각도와 상충지점의 변화를 비교하였다. 1-5구간 모두 고령운전자 비율이 10%에서 20%로 증가함에 따라 상충건수 및 상충심각도가 증가하였다. 고령운전자 비율 10%에서 156건, 20%에서 300건의 상충이 발생하여 10% 대비 약 48%의 상충건수가 증가하였으며 평균 상충심각도는 5.09에서 5.92로 증가하여 약 1.16배가 증가하였다. 상충지점 비교 결과, 고령운전자 비율이 증가할수록 상충발생 지점이 가속차로의 하류부 방향으로 이동함에 따라 가속차로가 존재하는 구간인 2-4구간에서 발생한 상충건수가 다른 구간에서 발생한 상충건수보다 비교적 많은 증가율이 나타났으며 상충심각도 또한 2-4구간이 비교적 다른 구간에 비하여 많이 증가하였다. 따라서 고령운전자 비율의 증가추세를 고려한다면 고속도로 유입연결로 가속차로 길이를 연장할 필요성이 있다. 마지막으로 고령운전자 비율이 증가함에 따른 고령운전자 비율별 적정 가속차로의 길이를 도출하였다. 현재의 고령운전자 비율로 가정한 10%에서 기본 가속차로 길이인 340m보다 약 30m 연장된 길이인 370m가 적정 가속차로 길이로 나타났다. 또한 고령운전자 비율이 증가함에 따라 상충률이 최소로 나타나는 적정 가속차로 길이는 증가하는 추세가 나타난다. 이는 교통안전성 측면에서 기본 가속차로 길이인 340m는 현재 고령운전자 비율인 10%에서 고령운전자의 주행행태를 안전하게 반영하지 못하는 것으로 분석되었다. 결론적으로 고령운전자를 고려한 도로설계 계획을 위해서는 향후 증가할 것으로 예측되는 고령운전자의 비율을 고려한 가속차로 길이 기준을 재정립하거나 가속차로 길이의 최소기준을 연장할 필요성이 있다. 본 연구결과는 도로설계 시 고령운전자를 고려한 고속도로 유입연결로 가속차로 길이의 기준을 설정하는데에 참고할 수 있으며 고령운전자의 통행량이 많거나 증가할 것으로 예상되는 고속도로 유입연결로에서 가속차로 길이를 연장할 경우 본 연구결과를 활용할 수 있다. 다만 비용이나 시간 등의 현실적인 문제로 인하여 가속차로 길이를 연장하는 것이 불가능한 상황이 예상되므로 가속차로 길이의 연장 이외에 추가적인 방안이 필요하다. 이에 대한 방안으로 고속도로 노즈부의 길이를 연장하여 유입연결로와 본선이 합류하기 시작하는 구간에서 가속차로를 주행하는 차량의 차로변경을 제한하는 방안이 있다. 또한, 차단봉과 같은 물리적 시설을 설치하여 가속차로에서 본선으로의 진입을 제한하는 방안이 있다.
향후 연구방향
본 연구는 해외 문헌에서 참고한 고령운전자의 주행행태를 이용하였으나 우리나라 고속도로를 주행하는 고령운전자의 주행행태 자료를 수집하여 우리나라의 교통흐름과 고령운전자 특성에 맞는 적정 가속차로 길이를 연구할 필요성이 있다. 또한 본 연구에서는 교통량과 주행속도의 변화를 고려하지 않았으며 상충유형 또한 후미추돌 상충만을 고려하였기 때문에 본 연구에서 제시하는 가속차로 길이 연장의 필요성을 주장할 수는 있으나 일반화할 수는 없다. 따라서 교통량과 주행속도 조건을 다양화하고 후미추돌, 교차상충, 차로변경 상충 등 여러 가지 상충유형을 고려한 추가 연구를 진행하여 본 논문에서 제시한 대안을 일반화할 필요가 있다. 교통량은 서비스 수준(A-E)을 고려하여 자유류 상태, 용량 상태와 같은 다양한 교통류 상태를 반영할 수 있으며 또한 본 연구의 분석구간은 다수의 차로변경이 발생하는 특성이 있으므로 차로별 통과교통량이 교통류 안전성에 영향을 미칠 것으로 판단한다. 따라서 다양한 차로별 통과교통량과 가속차로 길이를 분석 시나리오로 고려하여 향후 연구를 수행한다면 교통류 안전성이 최적화된 적정 가속차로 길이의 도출이 가능할 것으로 판단한다. 더불어 가속차로 연장 시 소요될 것으로 예상되는 연장 비용 또는 사고감소 편익 연구를 동시에 진행한다면 연구결과의 실효성 및 활용성을 마련할 수 있다. 본 연구는 안전성에 대한 평가만을 진행하였으나 가속차로 길이 증가에 따른 이동성, 환경성을 고려한다면 종합적인 가속차로 길이 평가 연구가 가능하다. 또한 최근 자율주행차 기술의 발전에 따라 고령운전자의 사고발생에 대한 방안으로 자율주행차 이용이 대두되고 있으며 고령운전자가 자율주행차를 이용하는 경우 발생하는 개선효과에 관한 연구를 수행할 필요가 있다.
