

서론
예측 행태를 고려한 보행자 경로 계획 모형
1. 예상 점유 지도와 현재 점유 지도
2. 계획 경로 구성
3. 지연 시간 산출
4. 최적 계획 경로 산출 문제 정의
시뮬레이션 결과 및 분석
1. 최적 계획 경로 산출 실험
2. 예상 행태의 효과 검증 시뮬레이션
결론
서론
최근 지속가능한 친환경 교통수단이 큰 관심을 받으면서 보행환경의 계획 및 조성에 관한 관심도 커졌다. 이와 함께 보행 행태에 대한 이해와 이를 반영한 보행공간 평가의 필요성 또한 증가하고 있다.
보행자 행태 모형은 거시적 이동 모형과 미시적 이동 모형이 보행자 이동 모형으로 구분 가능하다(May, 1990). 거시적 모형들에서는 군중들의 집단적 움직임을 모형화하는 것에 집중하였고(Helbing, 1992; Helbing and Molnar, 1995; Henderson, 1971, Henderson, 1974; Hoogendoorn and Bovy, 2000), 미시적 모형들은 개별적인 움직임의 모델링을 통해 보행자 간의 상호작용 표현에 집중하였다(Antonini et al., 2006; Asano et al., 2010; Gipps and Marksjö, 1985).
그 후, 하나의 모형으로는 복잡하고 다변적인 보행자 움직임을 표현하는 것은 부족하며, 따라서 보행자의 행태는 다층적으로 접근해야한다는 주장의 일환으로 Hoogendoorn and Bovy(2004)와 Daamen(2004)은 계층적 보행자 행태 이론을 제안하였다. 해당 이론은 보행 과정을 전략(strategical) 단계, 전술(tactical) 단계, 실행(operational) 단계로 나누어 설명한다. 먼저 전략 단계에서 보행자는 어떤 활동을 어디서 할 것인 지에 대한 계획을 세운다. 다음으로 전술 단계에서는 각 활동의 순서와 이동 경로를 계획한다. 마지막으로 실행 단계는 보행자들이 앞선 두 계획에 따라 실제로 이동하는 행위와 예기치 못한 상황에서 이동 속도를 변경하는 행위와 같은 즉각적인 반응을 포함한다. 각 단계에서 모든 보행자의 행동은 이동 비용으로 이어지며 보행자는 이동 비용을 최소화하는 판단과 행동을 한다. 이 계층적 보행자 행태 모형은 현재 널리 받아들여져, 많은 보행자 연구들의 기초가 되었다(Asano et al., 2010; Shin et al., 2013; Ben-Akiva and Bierlaire, 2003; Bierlaire and Frejinger, 2005; Ramming, 2001).
본 논문은 계층적 보행자 행태 이론을 기초로 세 단계 중 전술 단계에 해당하는 경로 계획 모형을 제안한다. 지금까지 제안된 경로 계획 모형들이 고려한 요소에는 보행 시간 및 이동 거리, 경로 혼잡도, 이동의 즐거움, 필요한 노력 크기 등이 있다(Al-Widyan et al., 2015; Asano et al., 2007; Crociani et al., 2015). 이들 중에 이동의 즐거움은 보행 주체와 상황에 따라 가변적이고 주관적인 요소이기 때문에 본 연구의 범위를 벗어나며, 필요한 노력의 크기는 도로의 경사와 폭 등의 도로의 고정적인 환경 특성이 같은 경우에는 결국 이동 거리와 혼잡도로 산정할 수 있다. 따라서 본 연구에서는 이동 거리와 혼잡도를 기반으로 총 이동 시간 및 총 이동 비용을 산정하고 이를 최소화하는 전술 단계의 경로 계획 모형을 제안하며, 이때 혼잡도는 혼잡으로 인한 예상 충돌 횟수를 산정하는 방식으로 고려한다.
전술 단계에서의 경로 계획 모형은 장거리 충돌에 대비한 경로 우회를 통해 미래 충돌 가능성을 크게 낮추는 행위를 이끌어내기 위한 단계로 이는 곧 실행 단계에서의 단거리 충돌 회피를 위한 급격한 감속 혹은 방향 전환 횟수를 줄이기 위함이다. 여기서 말하는 장거리 충돌은 미래에 발생할 것으로 예상되는 충돌이므로 전술 단계에서의 경로 계획 행태 모형은 보행자가 미래 보행 환경을 예상하는 행태 모형을 포함하여야 한다. 하지만 보행 환경 예상 효과를 고려한 단거리 충돌 회피 행태 모형에 대한 선행 연구는 풍부 반면(Karamouzas et al., 2009; Suma et al., 2012; Zhou and Shi, 2015), 경로 계획 모형의 대부분은 경로 계획을 하는 현재 시점에서의 혼잡만을 경로 계획 요소로 반영하였다(Crociani et al., 2015; Haghani and Sarvi, 2016; Tak et al., 2018; Al-Widyan et al., 2015; Asano et al., 2007; Crociani et al., 2015). Hsu and Chu(2014)가 보행 환경의 변화를 예상하는 행태를 적용한 경로 계획 모형을 제안하고 있지만, 모든 보행자가 다른 보행자들의 최종 목적지를 모두 알고 있고, 이를 기준으로 다른 보행자들의 이동 경로를 예측한다는 전제를 가진다. 이는 보행자 모형으로서 다소 비현실적인 전제이며, 이동 경로 예측에 대한 불확실성을 고려하지 않은 한계를 가지므로, 현실적인 보행 환경 예상 행태를 묘사하는 경로 계획 모형이 필요하다.
따라서 본 논문은 보행자가 현실적으로 고려할 수 있는 요소인 다른 보행자들의 현재 위치와 속도 정보를 기반으로 보행 환경 변화를 예상하고 이를 경로 계획에 반영하는 경로 계획 행태 모형을 제안한다. 본 모형은 해당 예상 결과에 대한 불확실성을 고려하기 위해 ‘예상 점유 지도’를 생성하여 계획 경로가 가진 충돌 가능성에 대한 비용을 산정한다. 이어지는 2장에서는 제안 모델의 방법론을 소개하고, 3장에서는 제안 모형을 검증할 수 있는 시뮬레이션 실험 결과를 분석하며, 마지막 4장에서는 본 연구의 결론을 서술한다.
예측 행태를 고려한 보행자 경로 계획 모형
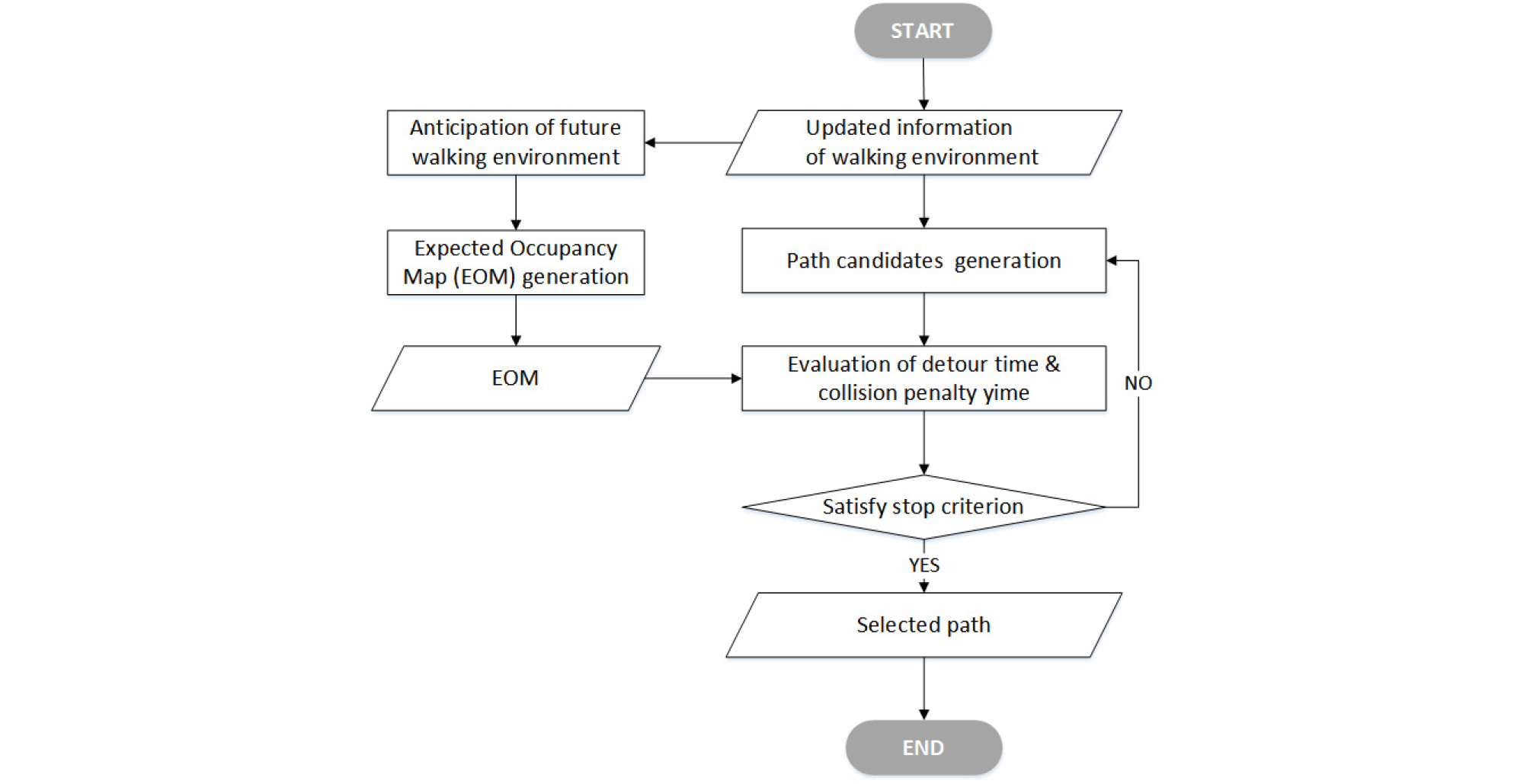
본 논문에서 제안하는 예측 행태를 고려한 보행자 경로 계획 모형은 총 지연 시간을 최소로 하는 경로 경유 지점을 결정한다. 이 때, 총 지연 시간(τt)은 최단 거리 경로 대비 늘어난 거리로 인한 지연 시간(τd)과 다른 보행자들과의 예상 충돌 횟수로 산정되는 지연 시간(τc)으로 구성되고, 계획 경로는 각 경로 경유 지점들을 직선으로 이어 완성된다. 본 경로 계획 모형의 흐름도는 Figure 1과 같다. 주변 보행자들의 현재 위치와 보행 속도가 현재의 보행 환경 정보로서 입력되면 이를 이용하여 경로 계획 관심 시간 동안의 주변 보행자들의 개별 위치를 예상하고 이를 통합하여 각 시각의 예상 점유 지도(Expected Occupancy Map, EOM)를 생성한다. 미래 점유 지도는 생성된 경로 후보의 τd와 τc을 산정하여 경로 후보 생성 정지 기준을 만족할 때 까지 경로 생성부터 τd와 τc 산정 단계를 반복하여 최적 경로를 산출한다. 아래는 본 논문에서 쓰인 주요 용어와 주요 변수를 정리한 것이다.
∙ 예상 점유 지도(EOM): 보행자가 주변 사람들의 현재 위치와 속도를 기준으로 예상하는 미래의 보행 환경을 표현한 것으로, 주변 지점들이 사람으로부터 점유될 확률로 구성
∙ : 시각에 i번째 행과 j번째 열에 속하는 공간이 한 명 이상의 다른 보행자로부터 점유당할 확률
∙ : k번 째 보행자가 시각에 i번 째 행과 j번 째 열에 속하는 공간 위치에 존재할 확률
∙ : 번 째 계획 경로의 경유 지점들의 집합
∙ : 번 째 계획 경로를 구성하는 모든 지점들의 집합
∙ : 한 번의 충돌로 인한 지연 시간
∙ : Q(m)을 구성하는 지점들의 충돌 확률의 합으로 구해지는 m번 째 계획 경로의 충돌 확률의 합
∙ : 전체 지연 시간, : 최소 거리 경로 대비 늘어난 거리로 인한 지연 시간, : 충돌로 인한 지연 시간
1. 예상 점유 지도와 현재 점유 지도
예상 점유 지도는 생성된 계획 경로를 따라 이동했을 때 예상되는 충돌횟수를 산정하기 위해 생성되며, 이 때 현재 보행자의 위치만으로 예상 충돌횟수를 산정하지 않고 현재 보행자들의 위치와 속도를 기반으로 예측된 미래 보행자들의 위치로 예상 충돌횟수를 산정함으로써 보행자의 예측 행태를 구현한다. 예상 점유 지도는 x축, y축인 공간 축과 시간 축으로 구성된 3차원의 행렬이며 각 행렬 요소는 해당 공간과 시간에 다른 보행자들이 위치할 확률을 예상 보행자 수의 형태로 나타낸다. 경로 계획 영역의 보행 환경을 x축으로 Nx개, y축으로 Ny개로 균등하게 나누어 생성된 각 셀의 크기는 △x, △y 로 정의한다. 시간 축은 전체 경로 계획 관심 시간대를 △t의 간격으로 나누어 설정한다. 즉 EOM(xi, yj, tl)는 tl 시각에 i번째 행과 j번째 열에 속하는 공간이 한 명 이상의 다른 보행자로부터 점유당할 확률을 나타낸다.
예상 점유 지도 생성은 개별 보행자들의 미래 위치 예측에서부터 시작된다. 경로 계획 범위 내에 존재하는 전체 K명의 보행자 중 k번째 보행자(1≤ k≤ K)의 예상 미래 위치는 해당 보행자의 현재 위치와 이동 속도를 기반으로 Equation 1과 같이 산정된다.
| $$\begin{array}{l}x_k(t)=x_k(t_0)+v_k^x(t-t_0)\\y_k(t)=y_k(t_0)+v_k^y(t-t_0)\end{array}$$ | (1) |
이 때 t0는 현재 시각, t는 k번 째 보행자의 위치를 예상하고자 하는 시각을 나타내고, (xk(t), yk(t))은 t 시각일 때 k번 째 보행자의 예상 위치 벡터를 나타낸다. k번 째 보행자의 속도는 위치를 예상하고자 하는 시각까지 현재 속도로 유지된다는 가정이 전제되며, 벡터()로 나타낸다. 하지만 위와 같이 구해진 위치는 예상 값에 불과하기 때문에 이를 평균값으로 하는 정규분포로서 개별 보행자의 미래 위치를 표현하고자 한다. 먼저 을 k번 째 보행자가 tl 시각에 i번 째 행과 j번 째 열에 속하는 공간 위치에 존재하는 이벤트로 정의한다. 그리고 P(k)(xi, yj, tl)를 이벤트 가 일어날 확률로 정의하며, Equation 2와 같이 산정한다.
| $$P^{(k)}(x_i,\;y_j,\;t_l)=\int_{y_j-\triangle y/2}^{y_j+\triangle y/2}\int_{x_j-\triangle x/2}^{x_j+\triangle x/2}(f_y^{(k)}(m_{t_l}^y,\sigma_{t_l})f_x^{(k)}(m_{t_l}^x,\sigma_{t_l}))dxdy$$ | (2) |
이 때 이며, 와 는 독립적이기 때문에 이변수 정규 확률 밀도 함수는 로 나타낼 수 있다. 여기서, 와 는 Equation 1에서 구한 예상 위치 값 xk(tl), yk(tl)와 같고, 표준편차 σtl의 크기는 곧 예상한 위치 값의 불확실성의 크기를 나타낸다. 표준편차 σtl는 3 시그마 법에 따라 99.97%의 확률로 예상 위치 범위를 포함하기 위해 로 설정한다. 이는 곧 보행자의 속도가 높을수록, 그리고 시간이 흐를수록 해당 물체의 미래 위치 예측의 불확실성이 커짐을 의미한다.
앞서 구한 경로 계획 범위 내에 존재하는 전체 K명의 개별 보행자들의 미래 위치 분포를 이용하여 경로 계획 범위 내 공간과 시간의 예상 점유 지도를 구할 수 있다. 먼저 한명 이상의 보행자가 tl 시각에 i번 째 행과 j번 째 열에 속하는 공간 위치에 존재하는 이벤트를 로 정의한다. 그리고 가 일어날 확률은 앞서 정의한 예상 점유 지도 정의에 따라 EOM(xi, yj, tl)과 같으며 Equation 3과 같이 산정한다.
이 때 는 와 같다. Equation 3에서 4번 째 항 이상은 무시해도 될 만큼 값이 작으므로 3번째 항까지만 사용한다.
현재 점유 지도는 주변 보행자들의 현재 위치로서 보행 환경의 점유 상태를 표현한 2차원 행렬이다. 그러므로 현재 점유 지도는 예상 점유 지도에서 tl=0일 때인 EOM(xi, yj, 0)과 같다. 예상 점유 지도가 주변 보행자들의 현재 위치와 속도로 미래의 보행 환경 점유 분포를 표현한 것과 같이 현재 점유 지도도 현재 보행 환경 점유 분포를 표현한다. 다만, 예상 점유 지도와 다르게 정확히 공간 점유 여부를 알 수 있으므로 현재 보행자가 존재하는 공간에는 1, 존재하지 않는 공간에는 0으로 채워진다. 이는 보행자가 다른 사람들의 위치를 정확하게 인지할 수 있다는 가정을 전제한다.
2. 계획 경로 구성
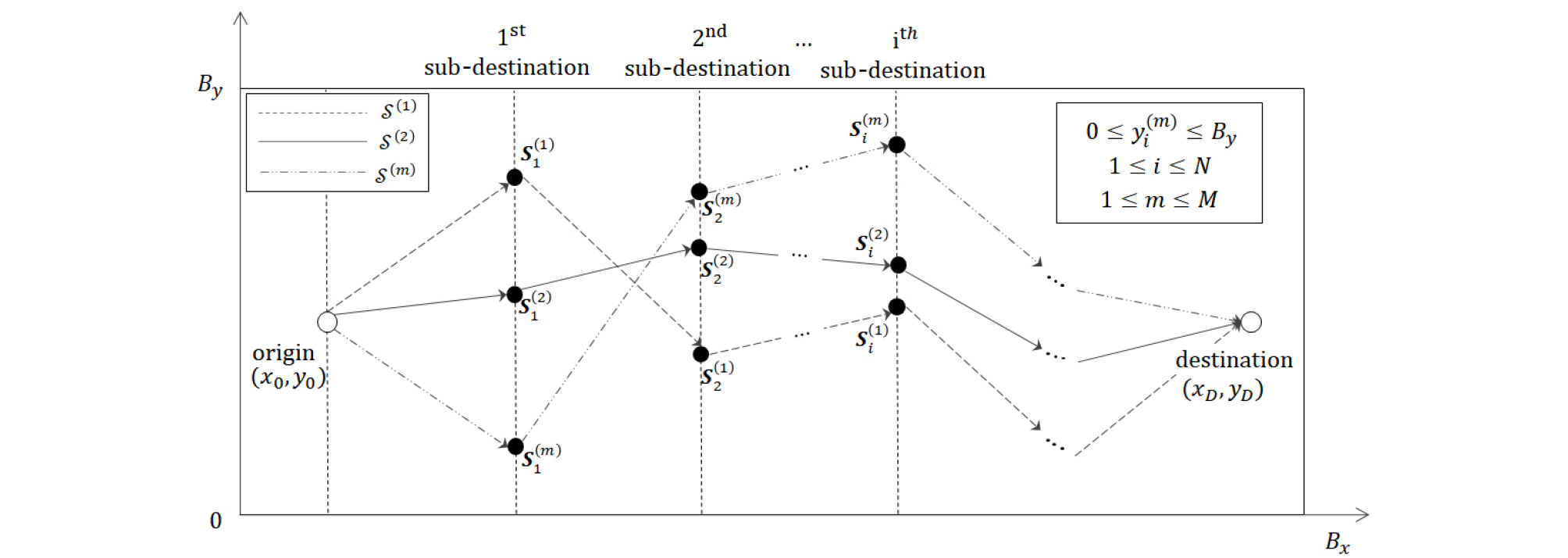
본 논문에서의 보행자의 계획 경로는 보행자의 현재 위치와 최종 목적지 사이에 존재하는 경유 지점들로 정의된다. 경유 지점 위치는 모두 x축 좌표들부터 결정되고, 정해진 x축 좌표들을 기준으로 최적의 y축 좌표들을 결정한다. 현재 위치와 최종 목적지 사이에 고정된 물체가 없는 경우에는 현재 위치와 최종 목적지 간의 직선 거리를 주어진 경유지 간 x축 방향 거리 ρ보다 길지 않게 최소의 갯수로 균등하게 나누는 지점의 x축 좌표들이 경유 지점의 x축 좌표들로 결정된다. 그렇지 않은 경우에는 고정된 물체의 꼭짓점의 x축 좌표가 필수 경유 지점의 x축 좌표로 결정되고, 현재 위치와 최종 목적지, 필수 경유 지점들 사이에 x축 방향 거리가 ρ보다 긴 경우에 ρ보다 길지 않게 최소의 갯수로 균등하게 나누어 경유 지점들의 x축 좌표를 결정한다. Figure 2는 현재 위치와 최종 목적지 사이에 고정된 물체가 없는 환경에서의 계획 경로 구성을 보여준다. 먼저 출발 지점, 즉 현재 위치는 (xO, yO)로 정의하며, 최종 목적지는 (xD, yD)로 정의한다. 후보 경유 지점들의 집합은 총 M개가 생성되며 그 중 m번 째 집합은 S(m)으로 정의된다. S(m)은 Equation 4와 같이 정의한다.
| $$S^{(m)}\equiv\;\left\{(X_i^{(m)},\;Y_i^{(m)}),\;\forall\;i=1,\;\cdots\;,N\right\}$$ | (4) |
이 때 는 각 경유 지점들의 x좌표 및 y좌표이다. 후보 경로 지점 집합 역시 총 M개가 생성되며, 그 중 m번 째 집합을 Q(m)으로 정의하고 이는 S(m)에 속한 경유 지점들과 출발지, 최종 목적지를 정해진 단위 시간 간격으로 직선으로 잇는 모든 지점들로 구성된다. 각 지점들 간의 거리는 해당 보행자의 보행 속도에 따라 달라진다. 보행 속도가 v로 일정하다고 가정할 때 Q(m)과 는 Equation 5와 같이 정의한다.
| $$\begin{array}Q^{(m)}\equiv\;\left\{Q_i^{(m)},\;\forall\;i=1,\;\cdots\;,N\right\}\\Q_i^{(m)}\equiv\;\left\{(x_t^{(m)},\;y_t^{(m)}),\;\forall\;t=1,\;\cdots\;,T^{(m)}\right\}\end{array}$$ | (5) |
이 때 이며 는 S(m)에 속한 경유 지점들과 출발지, 최종 목적지를 정해진 단위 시간 간격으로 직선으로 잇는 모든 지점들로 정의한다.
3. 지연 시간 산출
제안하는 경로 계획 모형은 이동 거리가 짧고 충돌 위험이 적은 경로가 그렇지 않은 경로보다 보행자에게 더 매력적인 경로로 인식됨을 가정하며, 이는 많은 기존 연구에서 통용되고 있는 가정이다(Al-Widyan et al., 2015; Crociani et al., 2015). 총 M개의 경로 후보 중 m번 째 경로 후보의 최단 거리 경로 대비 늘어난 거리로 인한 지연 시간()과 다른 보행자들과의 예상 충돌 횟수로 산정되는 지연 시간()이 산출되며, 이 두 지연 시간의 합을 총 지연 시간()으로 정의한다. 먼저 은 앞서 정의한 계획 경로의 정의에 따라 후보 경로 지점 집합의 요소인 을 이용하여 Equation 6과 같이 산정할 수 있다.
| $$\tau_d^{(m)}=(\sum_{t=1}^{T-1}\sqrt{{(x_t^{(m)}-x_{t+1}^{(m)})}^2+{(y_t^{(m)}-y_{t+1}^{(m)})}^2}-\sqrt{{(x_O-x_D)}^2+{(y_O-y_D)}^2})/v$$ | (6) |
다음으로 은 해당 후보 경로 지점들이 가진 충돌 확률과 한 번의 충돌로 인한 지연 시간(tcp)의 곱으로 Equation 7과 같이 표현할 수 있다.
| $$\tau_c^{(m)}=t_{cp}\times\sum_{t_l=1}^{T(m)}P(\widehat{x_i}(t_l),\;\widehat{y_i}(t_l),\;t_l)$$ | (7) |
여기서, .
4. 최적 계획 경로 산출 문제 정의
제안하는 모델에서 최적 경로란 최소의 를 가지는 경로로 정의된다. 계획 경로의 경유 지점 x축 좌표가 고정된 물체의 위치와, 출발지, 도착지 위치에 따라 결정되므로, 최적화 문제의 변수는 경유 지점들의 y축 좌표이다. 후보 경로 지점 집합 (m)에 속하는 경로 중 가장 작은 값을 가지는 경로를 찾는 것이 최적 문제이며, Equation 8과 같이 정의할 수 있다.
여기서, 는 최적 계획 경로를 나타낸다. 연속적인 검색 범위에서 전수 조사를 통해 최적화를 하는 것은 거의 불가능하고, 해당 범위를 이산화하는 경우에도 만족스러운 최적값을 얻기 위해서는 O(KN)의 복잡도를 갖는 문제를 풀어야 하므로, 해당 문제는 NP-hard 문제이다. 따라서 본 연구에서는 해당 문제를 풀기 위하여 유전자 알고리즘을 사용하여 최적 경로를 산출한다.
시뮬레이션 결과 및 분석
이번 장에서는 제안하는 경로 계획 모형으로 두 가지 시뮬레이션 실험을 진행한다. 첫 번째 실험을 통해 최적 계획 경로 결과에 tcp가 끼치는 영향을 분석하고 다양한 보행 환경과 보행자들의 경로 계획 행태를 묘사함에 적절한 tcp값을 제안한다. 두 번째 실험에서는 제안하는 경로 계획 모형에 기존 보행자 이동 모형을 적용하여 경로 계획 모형에 예상 효과를 정량적으로 분석하고 예상 효과 고려의 필요성을 검증한다.
1. 최적 계획 경로 산출 실험
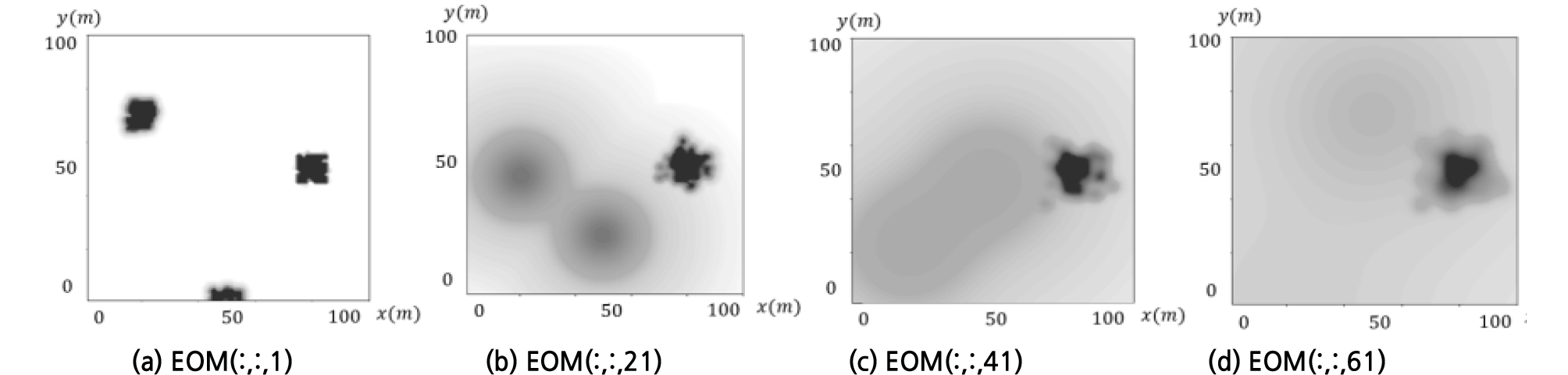
이 실험은 한 번의 충돌로 인한 지연 시간 변수인 tcp가 최적 계획 경로 생성에 미치는 영향을 분석하기 위한 실험이다. 실험 환경은 가로 100m, 세로 100m 크기의 고정 물체가 없는 평지이며, 한 명의 보행자가 현재 위치(0m, 50m)에서 목적지(100m, 50m)까지 이동하려한다. 실험 환경 내에 보행자 100명으로 이루어진 세 개의 군중 A, B, C가 있다. 보행자가 이동을 시작하는 시점에 군중 A는 (20m, 70m) 지점을 중심으로 모여 아래 방향으로 움직이고 있고, 군중 B는 (50m, 0m) 지점을 중심으로 모여 위 방향으로 움직이고 있으며, 군중 C는 (80m, 50m) 지점을 중심으로 제자리에 머무르고 있다. 군중 A에 속하고 있는 보행자들은 (20m, 70m)을 평균으로 갖는 100개 지점에서 출발하여 (20m 0m)를 평균으로 하는 또 다른 100개의 지점까지 도착하도록 설정되었으며, 군중 B에 속하고 있는 보행자들은 (50m, 0m)를 평균으로 갖는 100개 지점에서 출발하여 (50m, 100m)를 평균으로 갖는 100개의 지점까지 도착하도록 설정되었다. 군중 C에 속한 보행자들은 (80m, 50m)에 서있도록 설정되었다. Figure 3은 20초 간격으로 1분 동안 생성된 4개의 예상 점유 지도이다. 색이 진할수록 해당 위치에 보행자가 있을 확률이 높다는 것을 뜻한다. Figure 3(a) EOM(:,:,1)은 보행자가 예상하는 출발 1초 뒤의 보행 환경을 나타내며, 왼쪽에서 오른쪽으로 가는 순서대로 A 군중, B 군중, C 군중에 해당한다. 출발 시각에 시간이 흐를수록 세 군중 모두 위치 분포가 퍼지며 정확한 위치를 예측하기가 어려워지지만 그 중에서도 출발 시각에 움직이지 않았던 C 군중은 1분의 시간이 지나도 출발 시점에 있던 위치에 대부분 있을 거라는 보행자의 예상 행태가 Figure 3(d)에 나타난다.
경유지 간 x축 기준 거리 ρ는 100/60=1.6667로 설정하고, 충돌로 인한 지연 시간 변수, 즉 충돌 영향력 tcp를 0초부터 5초까지 늘려가며 생성한 계획 경로는 Figure 4와 같다. (a)는 tcp가 0인 설정이므로 충돌에 대한 비용이 없기 때문에 보행자는 최단 거리의 경로로 목적지까지 도달하고자 한다. (b)부터 tcp가 0보다 큰 값을 가지면서 최단 거리의 경로보다 돌아가는 경향을 보이기 시작한다. Table 1에서 정리한 tcp 별 최단 거리 대비 늘어난 거리 길이 및 최대 충돌 확률을 살펴보면, tcp가 증가할수록 거리가 늘어나고, 최대 충돌 확률이 낮아지는 것이 분석된다. 즉 tcp가 증가할수록 충돌이 보행자에게 끼치는 영향이 커지기 때문에, 보다 적극적으로 예상 충돌의 가능성을 낮추려고 하고 그 결과 tcp=5인 경우 tcp=0인 경우에 비해 이동 거리가 35.1038m가 늘어나고, 최대 충돌 확률은 0.85만큼 줄어든다.
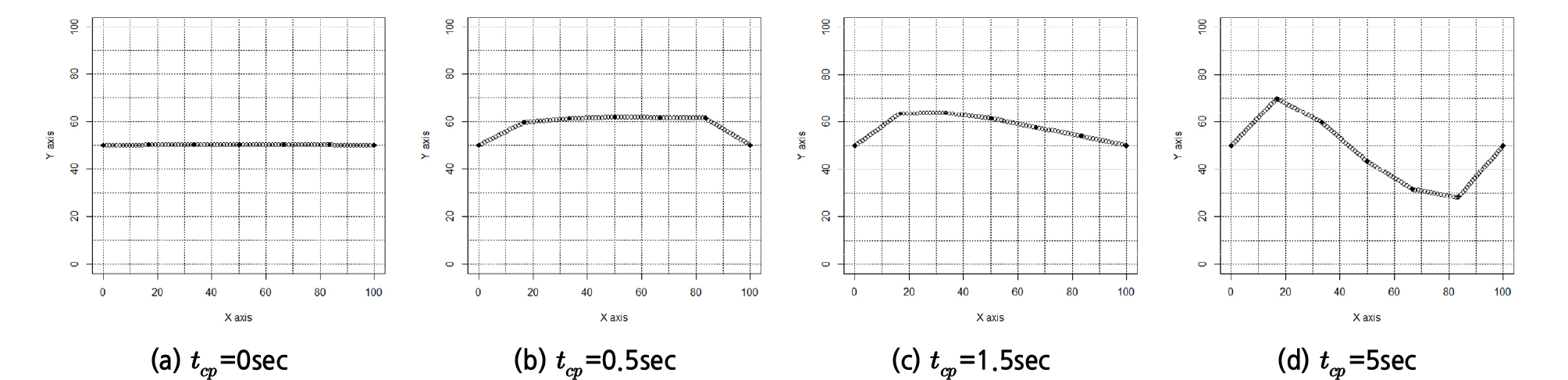
Table 1. Detour distance and maximum collision probability result for each tcp
| tcp | 0sec | 0.5sec | 1.5sec | 5sec |
| Detour distance | 0m | 6.5463m | 12.0813m | 35.1038m |
| Maximum collision probability | 1 | 0.63 | 0.34 | 0.15 |
Figure 4 결과를 통해 보행자가 충돌에 영향 받는 정도를 의미하는 tcp가 커질수록 충돌을 더 크게 기피하는 보행자의 행태를 묘사할 수 있음을 알 수 있다. 보행 환경과 보행자의 성격에 따라 tcp를 그에 맞게 설정할 필요가 있다. tcp가 0으로 설정한 경우 보행자는 충돌 확률이 1인 지점을 지나면서까지 거리를 최소로 하는 경로를 택했으며, 이는 긴급한 상황이나 서둘러야 하는 경우에 보행자가 나타낼 수 있는 행태이다. 또한 tcp가 0.5와 1.5로 설정된 경우는 이동 거리가 최소 거리 대비 약 13%와 24%가 증가하는 대신 충돌 확률은 각각 63%와 34%를 넘지 않도록 경로를 계획하였기에, 해당 tcp 값들이 극단적으로 위급하지 않은 일반적인 상황을 묘사할 수 있는 충돌 영향 변수로 판단된다. Shin et al.(2013) 또한 일반적인 보행환경에서의 충돌 영향 변수를 1.5초로 설정하여 실험을 진행하였다. 마지막으로 가 5로 설정된 경우는 다른 보행자와의 충돌 확률을 15% 이하로 유지하면서 보행자의 이동 거리가 최소 거리 대비 약 70% 증가하여 충돌에 아주 예민한 행태를 묘사하고 있음을 알 수 있다.
2. 예상 행태의 효과 검증 시뮬레이션
이 실험은 제안하는 경로 계획 모형에 기존 보행자 이동 모형(Helbing and Molnar, 1995)을 결합하여 보행자 이동 시뮬레이션 실험을 진행한다. 경로 계획 단계에서는 현재 점유 지도 기반으로 계획된 경유 지점 집합과 예상 점유 지도 기반으로 계획된 경유 지점 집합이 모두 산출되고, 보행자 이동 모형에서는 최종 목적지 대신 산출된 경유 지점 집합 내 경유 지점들을 차례로 중간 목적지로 정의하여 보행자 이동을 시뮬레이션한다. 현재 점유 지도를 기반으로 경로를 계획한 보행자들의 이동 궤적과 미래 점유 지도를 기반으로 경로를 계획한 보행자들의 이동 궤적을 결과물로 산출하여 두 경우의 이동 행태를 비교 분석하고 보행자의 예상 행태 모형을 검증한다. 이 실험에서 tcp는 선행 연구를 참조하여 1.5초로 설정한다(Shin et al., 2013).
실험 환경은 가로 200m, 세로 100m 크기의 직사각형이다. (60m, 35m), (60m, 65m), (140m, 35m), (140m, 65m) 지점에 꼭짓점을 가진 직사각형 고정 장애물이 위치하며 해당 장애물 위쪽에 30명의 보행자 무리가 오른쪽에서 왼쪽으로 이동한다. 이러한 보행 환경에서 시뮬레이션 시각 t=0부터 t=100까지 100명의 보행자가 차례로 x=0m 위 무작위의 y 위치에서 생성되어 (180m, 50m)로 향한다. 보행 환경은 이동 중인 보행자 무리로 인해 시간이 흐르면서 변화하고, 이렇게 변화하는 보행 환경에서 각기 다른 시각에 생성되는 보행자들이 어떤 경로로 (180m, 50m)에 도착하는 지를 분석한다. 이번 실험에서 설정된 ρ는 50m이다. Figure 5는 시뮬레이션 시작 후 흐른 시간 t가 각각 t=30, t=50, t=80, t=100일 때의 보행자들의 분포와 위치를 보여준다. 예상 점유 지도를 경로 계획에 적용한 결과가 (a)이고 현재 점유 지도를 적용한 경우가 (b)이다. 각 그림의 중앙에 위치한 회색의 직사각형이 고정 장애물이며, 회색 점이 오른쪽에서 왼쪽으로 이동 중인 군집된 보행자들 위치, 검정색 점이 이 실험의 분석 대상인 경로 계획을 하며 움직이는 보행자들의 위치를 나타낸다. 이 실험에서 보고자 하는 정량적인 값은 위쪽에서 보행에 큰 방해가 될 보행자 군집이 나타났을 때 왼편에서 출발한 보행자들의 이동 거리가 같은 경로인 고정 장애물 위쪽과 아래쪽 경로를 선택하는 비율이다. 따라서 Figure 6은 군집 보행자들과 고정 장애물 아래쪽, 위쪽을 지나고 있는 보행자들의 수를 시뮬레이션 시각에 따라 나타내었고, 이를 통해 군집 보행자가 경로 선택에 준 영향을 분석한다.
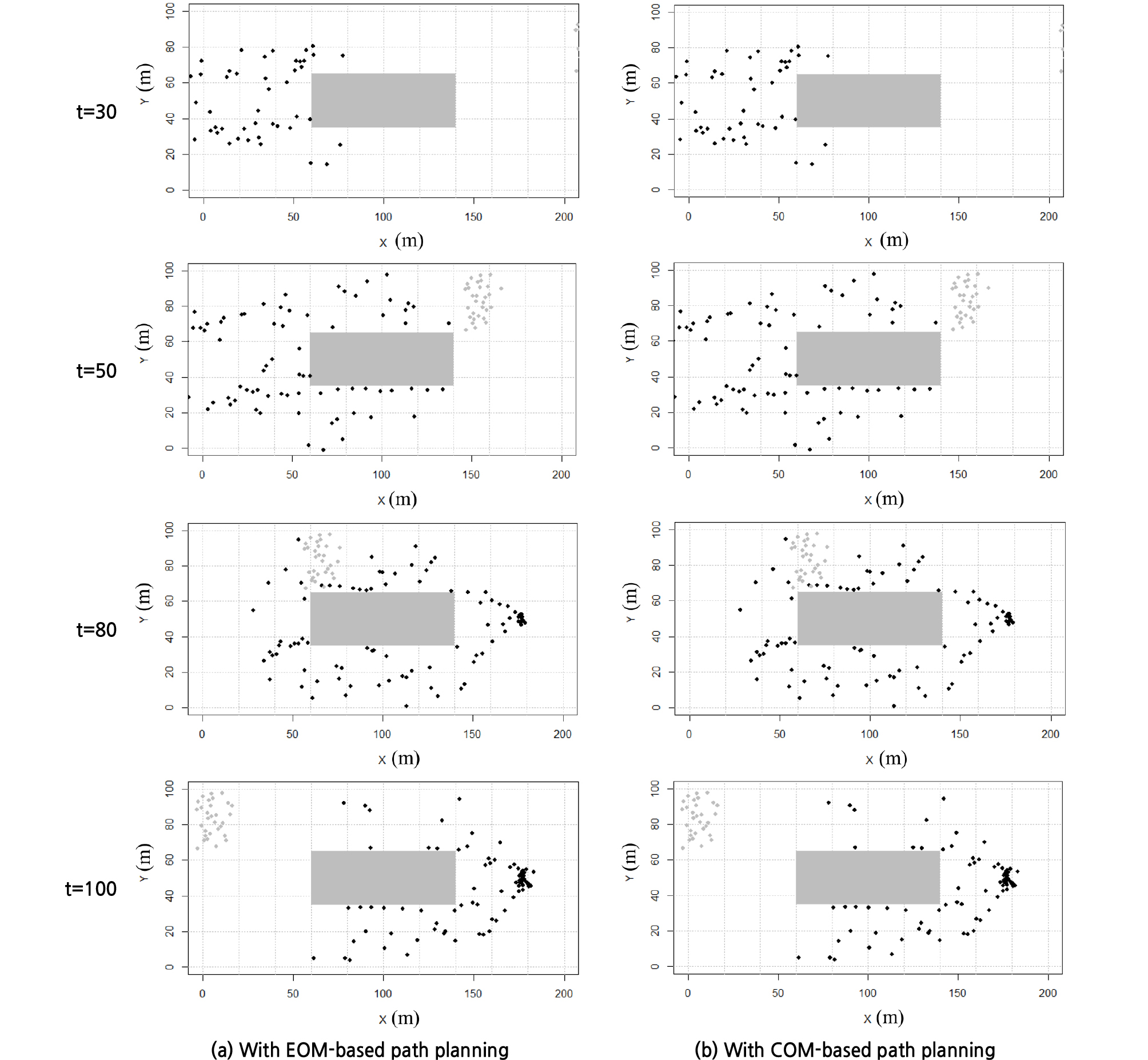
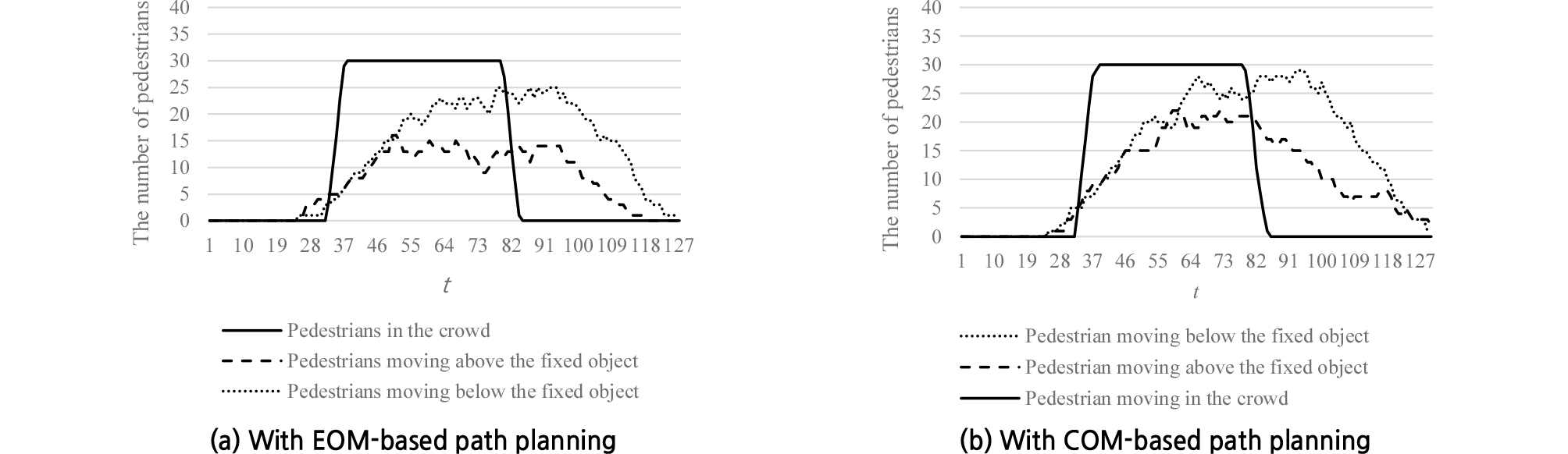
Figure 5와 Figure 6 모두에서 알 수 있듯이 (a)와 (b) 모두에서 t=0에서 t=51까지는 고정된 장애물 위쪽 경로와 아래쪽 경로를 선택하는 보행자 수가 유사하다. 하지만 그 이후부터 (a)에서는 위쪽 경로를 선택하는 보행자들의 비중이 급격하게 줄어든 반면 (b)에서는 증가하는 양은 줄어들었지만 t=70까지 증가하는 경향을 보인다. 이는 예상 점유 지도 기반으로 경로 계획을 할 때 보행자 군집이 고정 장애물 위쪽 경로의 충돌 확률을 높여 t=50 이후부터 보행자들로 하여금 아래쪽 경로를 선택하도록 유도하는 반면, 현재 점유 지도 기반으로 경로 계획을 하면 보행자 군집이 경로 계획에 영향을 주는 시점이 늦어지고, 더 많은 보행자가 충돌 확률이 큰 경로를 선택하려는 경향을 보여준다. 또한 전체 보행자들의 이동 거리 평균은 현재 점유 지도 기반 경로 계획의 경우 31.26m, 예상 점유 지도 기반 경로 계획의 경우 28.15m로 산정된다. 따라서 보행자의 현재 속도 기반으로 위치를 예측하여 경로 계획에 반영하는 행태는 이동 거리와 충돌 가능성 모두를 줄어들게 하는 효과를 가진다.
결론
본 연구는 보행자가 동적인 보행환경 변화를 예상하는 행태를 반영한 경로 계획 행태 모형을 제안하였다. 현실적인 예상 행태를 모형화하기 위하여 본 논문은 주변 보행자들의 현재 위치와 속도로 예상 점유 지도를 개발하였으며 이를 통해 계획 경로들의 예상 충돌 확률을 산정하였다. 이렇게 산정된 계획 경로들의 충돌 확률과 이동 거리를 최소로 하는 계획 경로는 유전자 알고리즘을 통해 산출되었다. 본 연구의 첫 번째 실험을 통해 본 모형이 보행자와 보행환경의 특성을 반영하여 보행자 간 충돌의 영향력을 조절할 수 있음을 보였다. 또한, 두 번째 실험을 통해 본 논문이 모형화한 보행자의 예상 행태가 곧 충돌 확률이 더 적은 경로를 택하는 행태를 유도하는 것을 확인하였다. 하지만 본 다양한 보행 환경과 보행자에 따라 충돌로 인한 지연 시간 변수를 제안하기 위해서는 실제 보행자 데이터를 통한 추가적인 실험이 필요하고, 실제 데이터를 통한 모형 검증과 모수 조절의 과정이 후속 연구로서 요구된다.
