

서론
유사 연구 고찰
항만 운전자 안전시거 극복방안
1. 항만 컨테이너 트럭 간 안전 이격시간
2. 교차로 후 진입 예상 트럭의 권장 주행속도
3. IoT 기반 항만 차량 안전 정보제공
제안된 방법 효율성 평가
1. 모의실험 조건 설정
2. 제안된 방법의 구현
3. 시뮬레이션 결과
결론
서론
항만의 주요 기능은 선박으로 이송되는 해외 수출입 물류의 효율적 운영관리이다. 효율적 물류의 적재 및 운송 관리를 위해 컨테이너 야적장 내 도로 이용을 엄격하게 제한하고 있다. 진․출입이 허용된 차량만 이용한다. 일반 차량은 이용하지 못한다. 이들 도로가 위치한 토지도 민간 영구 임대지로 구분될 수 있다. 특수 목적으로 도로가 활용되기에 ‘공도(公道)’라는 관점에서 안전관리가 이루어지지 않고 있다. 교통안전을 위하여 국가가 마련하는 도로법 및 도로교통법 규정 기술 기준과 다르게 도로 환경이 구축되어 있다.
항만 컨테이너 야적장 내 도로의 환경은 일반 공도의 환경과 다르다. 컨테이너가 도로 양측으로 높게 적재되어 접근 차량 운전자는 안전시거를 확보하지 못한다. 컨테이너를 장착한 무거운 트럭과 컨테이너를 장착하지 않은 가벼운 트럭들이 혼재한다. 노면표시 회전 유도선이 컨테이너 트럭 회전반경으로 설치되는 등 일반 공로의 노면표시와 다르다. 이렇게 다른 조건들이 혼재하는 항만 컨테이너 야적장 내부 도로에서 이동장비(트레일러 차량, 리치스태커, 크레인, 지게차 등) 교통사고가 빈번히 발생하는 것으로 보고된다(KOPLA, 2019).
공도와 유사한 수준으로 항만 내부 도로 환경을 개선하는 방법도 어렵다. 노면표시는 대형차량이 많은 항만 특성상 빨리 마모되어 소멸한다. 안전시설을 지속 유지 및 관리하기도 어렵다. 일부 ‘안전표지’가 항만 내부 도로에 설치 및 운영되기도 하나 ‘단속’이 집행되지 않는 ‘사도(私道)’로 이들 차량의 안전을 적극적으로 관리하지 못한다. 무엇보다 다른 방향에서 진입하는 차량이 도로 양측에 적재된 컨테이너들에 의해 가려지기 때문에 해당 차량과의 충돌위험을 운전자가 미리 인지하고 대응하기 어렵다. 또한, 안전관리 방안의 적용으로 인한 하적장 내 이동 효율성의 저하는 민간 항만 운영사 입장에서 적용하기 어렵다. 이러한 이유에서 항만 내 하적장 내 효율성을 유지하며 교통안전관리 방안도입의 필요가 있다.
본 논문은 항만 내 도로를 주행하는 차량(컨테이너 트럭, 크레인, 리치스태커, 지게차 등)에 ‘사물 인터넷(Internet of Things, 이하 IoT)’ 기반 ‘정보수집’ 및 ‘정보제공’ 장치를 부착하게 하고, 이들에게 위험한 잠재상충 상황이 예견될 때 미리 위험 경고를 제공하여 운전자가 사고위험을 피하게 하는 방법을 제안하고 교차로 운영의 효율성을 평가한다. 본 연구의 세부 목적은 다음과 같다.
- 주행 차량 위치정보 기반 잠재적 교통사고 발생 위험 판단 모형 개발
- 타 교통안전 확보 규제기술 대비 제안된 모형의 효율성 비교 평가
이는 미래 발생할 수도 있는 잠재적 교통 상충 상황을 예견한 후, 해당 위험 상황까지 전개되지 않도록 미리 운전자에게 경고하여 주행속도를 감속하게 하는 방안이다. 이러한 연구는 자율주행차량의 안전 확보 노력과 내용적 측면에서 비교될 수 있다. 자율주행기술을 연구하는 분야에서도 차량이 교차로를 진입하기 전에 잠재적 상충 위험을 판단하는 노력을 하고 있다. 본 논문이 제안하는 기술은 사람 운전자가 항만 내에서 트럭을 제어하는 상황으로 자율주행차량의 위험 회피 상황과 다르다. 자율주행기술은 도시부 도로와 고속도로 등 모든 도로에 적용 가능한 기술이 되어야 한다. 그러나 본 논문이 제시하는 기술은 항만 내 컨테이너 야적장 도로로 범위가 한정된다.
유사 연구 고찰
항만 컨테이너 야적장 내 도로 교통안전 확보를 위하여 수행된 기존 선행연구를 검토하였다. 항만 컨테이너 야적장 내부 도로 안전에 관한 연구는 교통사고 이력을 분석한 사례(KOPLA, 2019)로 국한된다. 과거 항만 교통사고 이력을 토대로 공학적 극복방안을 제시하는 연구는 발견되지 않는다. 컨테이너 트럭 운전자에게 위험 경고 정보를 제공하는 연구가 진행 중(KIMST, 2019)이라 참조할 결과는 부재하다. 본 논문이 제시하는 내용과 유사한 ‘차량 이동궤적 추적 기술’, ‘잠재 위험 진단 기술’,‘통신 인프라 활용 기술’ 등을 자율주행 부문에서 참조할 수 있다.
미래 교차로 운영 측면에서 Raravi et al.(2007)은 모든 차량의 여행시간을 최소화하는 교차로 운영방안을 동역학 기반으로 제시하며 차량간 정보교환의 중요성을 강조하였다. 차량 간 정보교환 방식으로는 미국 연방정부가 ‘차대차(vehicle-to-vehicle, V2V)’ 및 ‘차대인프라(vehicle-to-infrastructure, V2I)’ 무선통신 정보교환 방식을 제시하였다(FHWA, 2009). 해당 무선통신 기술을 활용하며 교차로 내부 차량 간 잠재적 상충을 회피하기 위해 또는 탄소배출량을 저감하기 위해 접근로 주행 차량의 가감속도를 선제 조절하는 방법이 활발하게 제시되었다(Milanes et al., 2010; Huang et al., 2012; Lee and Park, 2012; Zohdy et al., 2012; Liu and Kamel, 2015; Sharon and Stone, 2017).
교통안전 부문에 이와 같은 정보통신기술(Information and Communication Technology, ICT)의 지원이 필요함을 강조하며 Hoogendoorn et al.(2013)은 발전이 필요한 요소기술을 제안하였다. 이들은 (1) 차량과 인프라 간 단절 없는 무선통신 연계기술, (2) 무선통신 보안기술, (3) 차량 내부 탑재 소프트웨어 전산처리 속도 증진 기술, (4) 운전자들로부터 수용성 높은 차량 제어기술, (5) 차량 주변 위치하는 위험요인 감지 및 인식기술이다. 이와 더불어 미국 ‘전기전자학회(IEEE, 2015)’는 ‘주변 차량 정보’와 ‘도로 인프라 정보’를 융합하여 적극 활용하는 ‘연계차량(Connected Vehicle)’기술 관련 (1) 센서 장치, (2) 차량 네트워크 정보 플랫폼, (3) 소프트웨어 애플리케이션 기술의 필요성을 강조하였다. 차량 자체 장착된 센서만을 이용한 교통안전 확보에 한계가 있음을 Kim and Moon(2017) 역시 지적하며 차량 정보와 도로 인프라 정보를 융합 활용하여야 함을 제안하였다. 이러한 과정에서 KIPA(2017)는 IoT 기술, 인공지능(Artificial Intelligence)기술, 빅데이터 기술이 도로교통 안전부문에보다 적극적으로 활용될 필요가 있음을 지적하였다.
해당 기술로 인한 개선 효과를 계량화하기 위하여 Huang et al.(2012)은 네 개의 계층으로 구분되는 통합 시뮬레이션 플랫폼 연구를 수행하였다. 이들은 첨단 ICT 기반 교통안전 관리기술이 투입되는 경우 차량들의 지체도 85% 감소, 연료소비량 50% 감소하는 것으로 제시하였다. Bin and Kim(2017)은 이러한 ICT 기술 융합의 교통안전 분야 적용으로 도로교통 안전에 큰 개선 효과가 있을 것이라 분석하였다.
항만 운전자 안전시거 극복방안
적재된 항만 컨테이너로 운전자 안전시거 확보가 불가한 컨테이너 야적장 내부 교차로 도로를 주행하는 운전자들에게 (1) 잠재적 위험 상황을 선제적으로 파악한 후, (2) 이를 운전자에게 경고하여 감속을 유도하게 하여 교차로 안전을 확보하는 방안을 개발한다. 이를 위하여 (1) 차량에 센서를 부착하여 시간대별 차량 위치자료를 실시간으로 수집하고, (2) 수집된 자료를 토대로 차량의 미래 이동 위치 및 상충 상황을 예견하고, (3) 이를 운전자에게 경고 정보를 전달하는 과정이 수반된다. 앞서 언급된 바와 같이 항만 컨테이너 트럭 운전자들에게 안전 경고를 전달하는 방식으로 컨테이너 트럭의 자동제어 상황을 배제한다. 이들에 대한 설명을 아래 세부 단락으로 구분하여 제시한다.
1. 항만 컨테이너 트럭 간 안전 이격시간
교차로를 향해 이동하는 개별 차량의 ‘위치’ 자료를 단위 시간별로 수집한다. 개별차량별로 수집되는 일련의 ‘위치’ 자료로부터 차량의 이동궤적 추출이 가능하다. 이러한 이동궤적으로부터 차량의 단기 미래 속도 및 가속도 추정이 가능하다. 이렇게 수집되는 개별 차량의 궤적 정보를 토대로 차량간 잠재적 상충 발생 여부를 예견할 수 있다. 상충 발생이 잠재적으로 예상되는 경우 후 진입하는 차량 운전자에게 위험 경고를 제공하여 감속하게 한다. 해당 상황에서 운전자에게 너무 많은 감속이 발생하여 불필요한 간격 벌어짐 상황이 발생하지 않게 한다. 간격이 너무 가까우면 상충이 발생하고(안전 위협), 간격이 너무 멀면 운영 효율성이 저하된다. 적정한 수준의 시간 간격 설정이 필요하다.
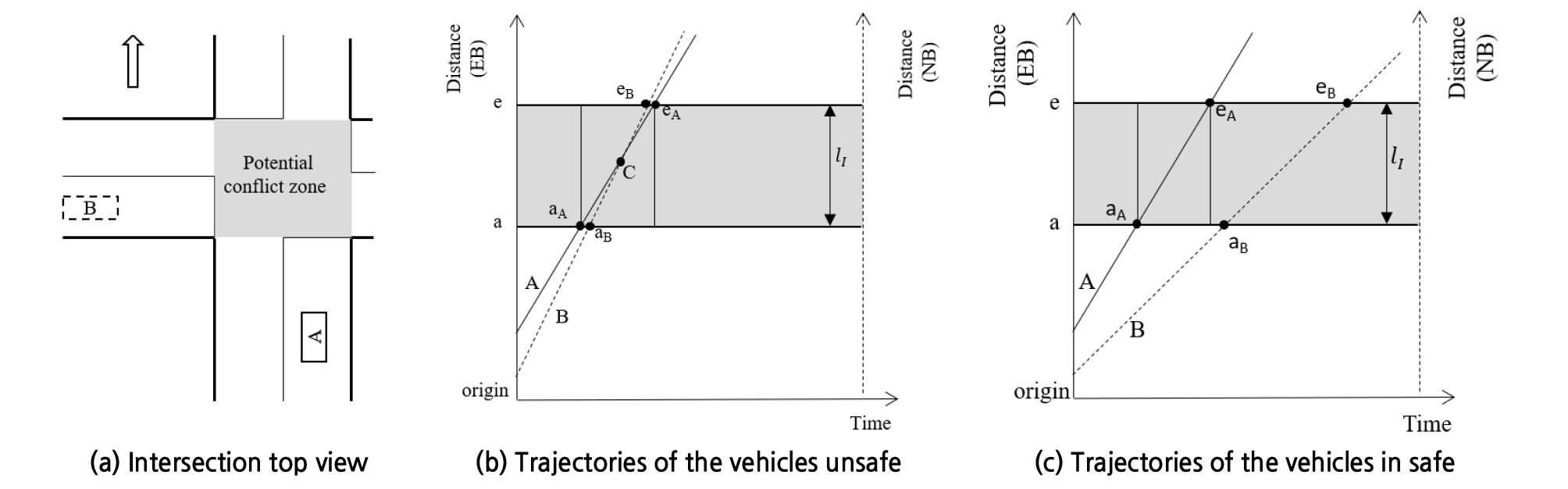
잠재상충 상황을 설명하기 위한 이차원 평면 그림을 Figure 1에 도식화하여 제시하였다. Figure 1(a)는 트럭 2대(트럭 A=북향, 트럭 B=동향)가 동일 교차로로 진행하는 상황이다. Figure 1(a)에 음영으로 제시된 교차로 내부 공간이 잠재상충 발생 가능 공간이다. Figure 1(b)와 1(c)는 해당 상황에서 도출될 수 있는 ‘시공도(時空圖)’이다. ‘시공도’의 수평축은 시간, 세로 우측 선은 북향 접근로 거리, 세로 좌측선은 동향 접근로 거리를 제시한다.
항만 컨테이너 야적장 적재된 컨테이너들로 인한 운전자 ‘안전시거’ 불량으로 위험을 인지하지 못한 경우, 트럭 A와 B는 속도를 감속하지 않고 유지하며 교차로를 Figure 1(b)와 같이 진입한다. Figure 1(b)는 두 대 트럭이 서로 상충하는 상황에 해당한다. 그러나 해당 잠재상충 상황을 미리 예견하고 교차로 후 진입하는 트럭 B에게 잠재상충을 경고하여 속도 저감을 유도하는 경우 Figure 1(c)의 상황이 발생한다.
이때 잠재상충 위험 경고를 교차로로 선 진입하는 트럭 A에는 제공하지 않는다. 트럭 A와 트럭 B가 함께 동시에 속도를 감속하는 경우 잠재상충이 지속 발생한다. 이러한 이유로 트럭 A는 운행속도를 유지하며 지속 주행할 수 있게 한다. 트럭 B는 잠재상충 위험 경고와 함께 권장 주행속도 정보를 제공한다. 이를 통해 트럭 B 운전자가 필요 이상으로 속도를 감속하지 않게 한다. 트럭 B 운전자가 필요 이상으로 속도를 감속하게 되는 경우 불필요한 지체 발생 및 운영 효율성이 저하되는 문제가 발생한다. 권장 주행속도를 트럭 B 운전자에게 제공함으로 안전관리로 인한 불필요한 지체가 부수적으로 발생하지 않도록 한다.
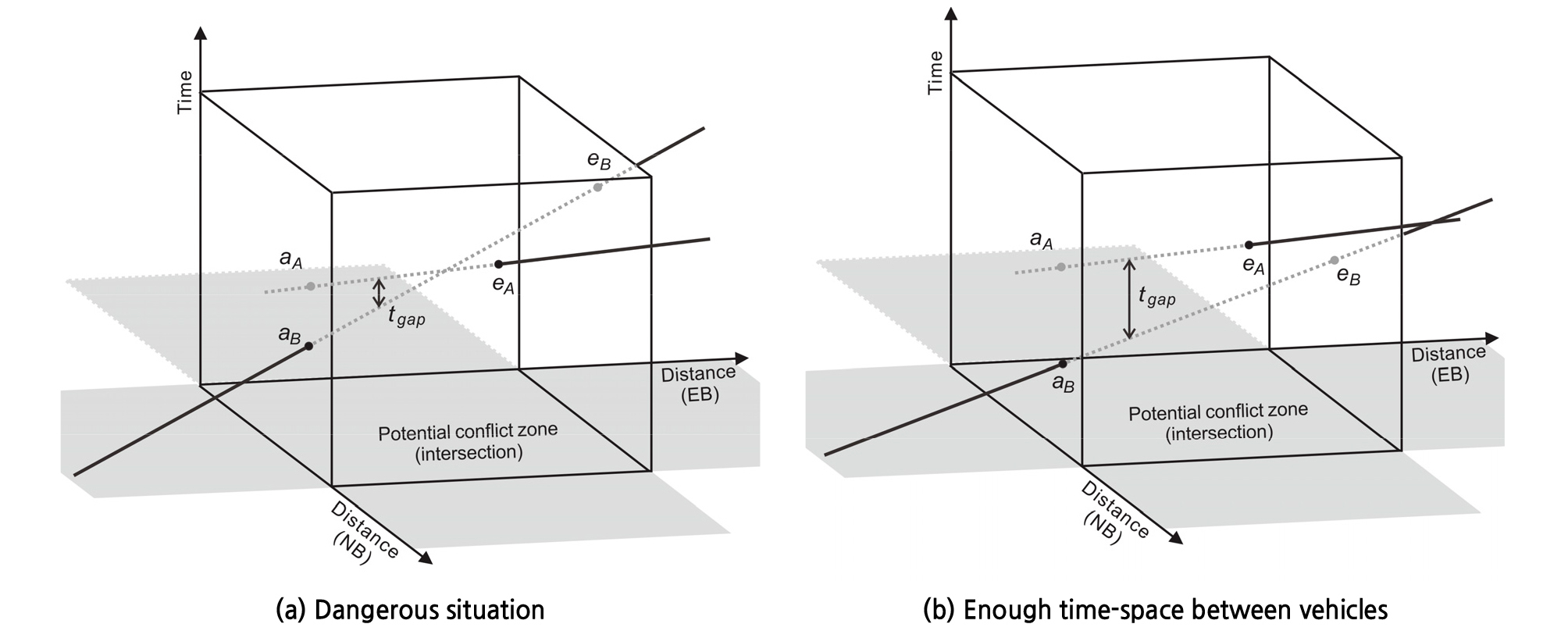
Figure 1에 제시된 잠재상충 공간 내 aA, aB, eB, eA 지점으로 결정되는 두 개 차량 통과 시간 간격(tgap)을 기준으로 교통 상충 및 안전 상황 구분이 가능하다. 이러한 시간 간격은 2차원 평면보다 3차원 공간에서 더욱 분명하게 구분된다. Figure 2는 3차원 공간 시공도를 제시한다.
Figures 2(a)와 2(b)는 Figure 1(b)와 1(c)의 시공도 상황을 3차원 공간에서 재구성한 것이다. 3차원 시공도에서는 수직축은 시간이며, 3차원 공간 평면상에서 두 개 접근로(북향 및 동향)를 서로 다른 축으로 구분하여 제시하였다. 3차원 공간에서 트럭 A의 궤적(aA, eA)과 트럭 B의 궤적(aB, eB)이 수직축(시간 축)을 기준으로 겹쳐지는 지점이 존재한다. 해당 지점이 상충이 발생할 수 있는 잠재 지점이다. 해당 지점을 기준으로 트럭 A와 트럭 B의 궤적 간 사이 거리가 충분히 가까운 경우 상충이 발생하는 것으로 판단할 수 있다. 잠재상충 존재 여부 판단을 위한 ‘시간 간격(tgap)’ 기준은 Equation 1을 적용한다.
| $$t_{gap}=1.5\ast(l_{veh}/v_{veh})$$ | (1) |
여기서, tgap은 충돌 지점에서 확보되어야 하는 ‘최소 안전 시간 간격’이고, lveh는 컨테이너 트럭의 길이, vveh는 컨테이너 트럭의 속도이다. 이는 항만 컨테이너 야적장 주변 도로를 이용하는 다양한 길이 트럭 제원을 반영할 수 있다. 충돌 지점에서 확보되어야 하는 안전 시간 간격은 항만 컨테이너 트럭 차량의 길이를 이동하는 시간의 1.5배 수준에 해당하도록 설계하였다. 해당 시간 간격보다 큰 간격으로 두 개 트럭이 상충 지점을 통과할 것으로 예견되면 안전 경고 정보를 제공하지 않는다.
2. 교차로 후 진입 예상 트럭의 권장 주행속도
상충이 예상되는 경우 교차로로 후 진입하는 차량의 속도 감속을 유도하여야 한다. 이때 운전자가 너무 많은 감속을 하지 않도록 적정 권장 주행속도 정보를 제시한다. 해당 권장 주행속도의 계산은 현재 트럭 B가 위치한 지점에서부터 잠재상충 지점까지의 거리를 기반으로 한다. 교차로를 향하여 차량이 현재 속도로 지속 주행하는 경우, 잠재상충 위험 지점까지의 공간적 ’이격 거리’는 Equation 2로 산정된다.
| $$d_{cp}=x(t_0)-x(t_{cp})=x(t_0)-0.5\times v\times at_{cp}^2$$ | (2) |
여기서, dcp=상충까지 거리, x(i)=시간 i 이동장비 위치 지점, tcp=상충 지점까지 주행 소요 시간, v=이동장비 주행속도, a=이동장비 가속도, t0=자료수집 시간, t=예상 상충 시간이다. 트럭 B가 잠재상충을 피하기 위하여 해당 거리를 주행하여야 하는 권장 주행속도의 계산은 Equation 3과 같다.
| $$v_{advisory}=d_{cp}/(t_{cp}+t_{gap})$$ | (3) |
여기서, vadvisory는 차량 B의 권장 주행속도(안전을 확보하기 위한 최대 권장 주행속도)이다. Equation 3에 제시된 보정된 주행속도로 차량이 주행속도를 낮추지 않는 경우 실시간으로 지속해서 교통안전 위험정보를 차량 B로 제공한다. 1:多 상충 시에는 위계가 낮은 도로의 차량에게 권장 주행속도를 제시한 뒤 제시된 권장 주행속도를 바탕으로 새로운 잠재 충돌을 식별한다. 상기와 같은 안전처리 방식은 차량의 통행 우선 규칙으로 선입․선출(First in First Out, FIFO) 방식의 적용을 의미한다. 이는 동일 진행 방향으로 차로변경 및 추월로 인한 통행우선권 전환이 없음을 가정하는 배경을 반영한다1).
3. IoT 기반 항만 차량 안전 정보제공
본 단락은 항만 컨테이너 야적장 주변 도로 주행환경 및 시스템 구성 방법을 제시한다. 시스템 측면에서 항만 컨테이너 적재장 도로를 주행하는 트럭들로 수집되는 개별차량 자료를 가공하고, 안전 경고 정보를 제공하는 장비가 필요하다. 이러한 장비들은 (1) 개별 트럭으로부터 ‘위치’ 자료를 단위시간마다 수집하는 무선통신 기능, (2) 수집된 단위시간 자료를 기반으로 트럭의 이동궤적 생성 프로세싱 기능, (3) 잠재적 상충 존재 여부의 예측, (4) 잠재상충 존재 시 교차로 후 진입 트럭 운전자에게 위험 경고 기능, (5) 해당 운전자에게 권장 주행속도 제공하는 기능을 실시간으로 수행할 수 있어야 한다. 해당 시스템 기능을 구성에 따라 도식화하여 Figure 3에 제시하였다.

컨테이너 트럭 내부에서 위치자료를 수집하고 발신할 ‘차내 단말기(On-board unit, OBU)’가 필요하다. 또한, 항만 컨테이너 야적장 도로 주행 트럭들의 ‘위치자료’를 실시간으로 수집하기 위하여 야적장 도로 주변에 ‘노변 정보수집 장치(Road-side equipment, RSE)’ 설치가 필요하다. 이들 OBU와 RSE 간 무선통신은 불필요한 통신 지체가 발생하지 않는 최신 무선통신 기술을 선택적으로 활용한다(예: Wireless Access in Vehicular Environment 또는 5G 통신기술 등).
항만 컨테이너 야적장은 진입 허가를 받지 않은 외부 차량 출입이 통제된다. 항만 내부 교차로 이용 차량은 (1) 항만 내부 전용 차량과 (2) 출입 허가를 득한 외부 차량으로 한정되기 때문에 모든 차량에 OBU 부착이 가능하다. 해당 장비를 통하여 모든 주행 차량의 위치 및 속도 정보가 중앙 운영관리 센터에 수집된다. 해당 중앙 운영관리 센터에 수집된 자료를 토대로 제안된 안전관리 방법을 적용하여 항만 내 교차로 진입 차량의 교통안전을 실시간 관리를 수행한다2).
제안된 방법 효율성 평가
제안된 방법의 안전성 검증에 앞서 효율성 평가를 수행한다. 도로 이용의 효율성을 평가하기 위하여 미시적 교통흐름 분석 모형인 비씸(Verkehr In Stadten Simulation model, VISSIM)이 제공하는 ‘컴인터페이스(COM Interface)’ 기능과 컴퓨터 파이선(Python) 프로그래밍 기술을 연계하여, 제안방법을 전산 환경에서 구현하는 ‘항만자동터미널내상충위험경고지원장치(Warnings Assistant Tools for Conflict and Hazardous Conditions at Automated Terminal, WatchCAT)’ 모듈을 개발하였다.
도로 안전관리 기술의 적용 시 나타나는 항만 컨테이너 야적장 교차로 통행의 효율성을 평가하기 위하여 널리 사용되는 기존 교차로 안전 관리방식과 비교하였다. 기존 전통적 운영방식은 Figure 4에 제시된 (1) 정주기 방식 교통신호 운영 통제방법과 (2) 부도로 일시정지(Two-way stop sign control, TWSC) 통제방법이다.
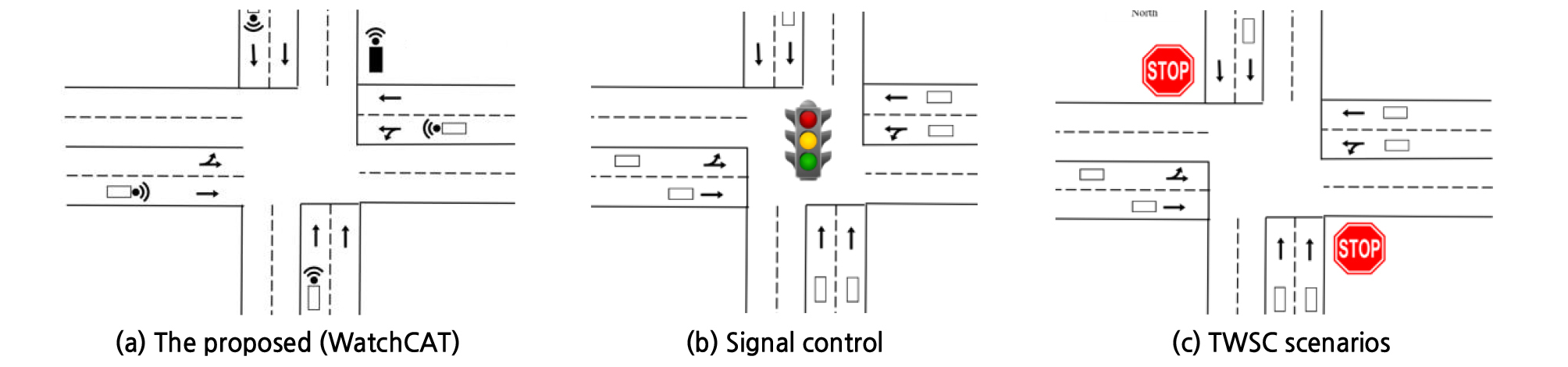
정주기식 교통신호 운영방식 및 TWSC 운영방식이 적용되었을 때에 비하여, 제안된 WatchCAT 운영방법이 적용되었을 경우 효율성을 비교하였다. 동일한 교통조건, 기하구조 조건을 설정하여 제어조건만을 상기 세 가지 방법에서 하나를 적용하는 비교 방법을 적용하였다.
1. 모의실험 조건 설정
실제 환경에서 교통조건 및 기하구조 조건을 동일하게 설정하는 조건을 충족하고, 현장 교통사고 발생 위험을 극복하기 위하여 모의실험 환경에서 이들을 비교 평가하였다. 양방향 2차로 접근로 4개로 구성되는 가상의 교차로를 설정하였다. 해당 교차로상에서 관측 가능한 13가지의 시나리오로 설정하였다. 교통조건은 실제 수집된 교통량 자료를 기반으로 보수적으로 혼잡을 고려하여 Table 1과 같이 구성하였다.
Table 1.
Traffic volume scenarios
주도로 교통량과 부도로 접근로 교통량 비율의 차이를 설정하였으며, 모든 시나리오에 적용되는 좌회전 비율은 10%로 동일하게 적용하였다. 접근로 기하구조 조건으로 포화교통류을 1,900대/시를 일괄 적용하였다. 신호교차로 운영에 반영되는 입력변수는 교통조건별 ‘싱크로(Synchro)’ 소프트웨어를 적용하여 설계된 ‘최적 교통신호 시간’을 적용하였다. TWSC는 VISSIM에서 제공하는 기본값을 적용하여 분석하였다.
모의실험 분석은 초기 네트워크 교통 수요 평활화를 위해 설정된 사전 모의실험 300초 이후에 수집되는 자료를 토대로 수행하였다. 1회 모의실험 분석에 사용된 실험 분석 시간은 3,600초/회이다. 상기 13개 교통조건별 5개의 서로 다른 무작위 난수를 사용하여 교통 발생 조건에 변화를 주었으며, 이들로부터 수집된 결과의 평균을 최종 결과값으로 사용하여 비교하였다. 항만 컨테이너 야적장 내부 도로 제한속도는 20km/h이나, 예외적인 과속 차량 등을 고려한 보수적인 시각에서 최대 속도를 50km/h로 설정하였으며, 가속 및 감속도는 VISSIM 기본값을 적용하였다.
2. 제안된 방법의 구현
본 단락은 VISSIM 모의실험 모형과 연계된 ‘제안된 방법 구현 모듈’에 대한 설명을 제시한다. 해당 모듈은 총 3개 권역으로 구분하며 구동되는 방식으로 개발되었다. 첫 번째 권역은 자료수집 권역이다. 이는 항만 도로를 주행하는 컨테이너 트럭의 위치정보의 센터로의 송신을 수행하는 권역이다. 두 번째 권역은 센터에서 수신한 트럭 위치정보를 기반으로 운전자가 해당 상충을 피할 수 있도록 새로운 속도를 재산정하여 제공함과 동시에 운전자가 새로운 권장 속도로 감속 주행하기 시작하는 권역이다. 여기서 재산정된 속도로 주행하게 되면 또 다른 차량과 새로운 상충이 발생하는 경우, 해당 차량과의 통행우선권을 고려하여 감속 대상 차량의 속도를 다시 재산정한다. 세 번째 속도는 변화한 속도로 확인 및 주행하며 교차로를 통과하는 권역이다.
3. 시뮬레이션 결과
항만 컨테이너 야적장에서 잠재상충 정보를 운전자에게 제공하는 경우 발생할 수 있는 운영 효율성 저하 여부를 판단하기 위한 평가지표로 ‘여행시간’ 지표를 설정하였다. 효율성 분석에는 항만 도로 특성을 고려해 주도로를 대상으로 분석을 실행하였다. 시뮬레이션 결과, WatchCAT 알고리즘이 주행 시간 측면에서 기존 교차로 안전관리 방식보다 우수한 것으로 나타났다. Figure 5는 시뮬레이션 결과를 제시한다.
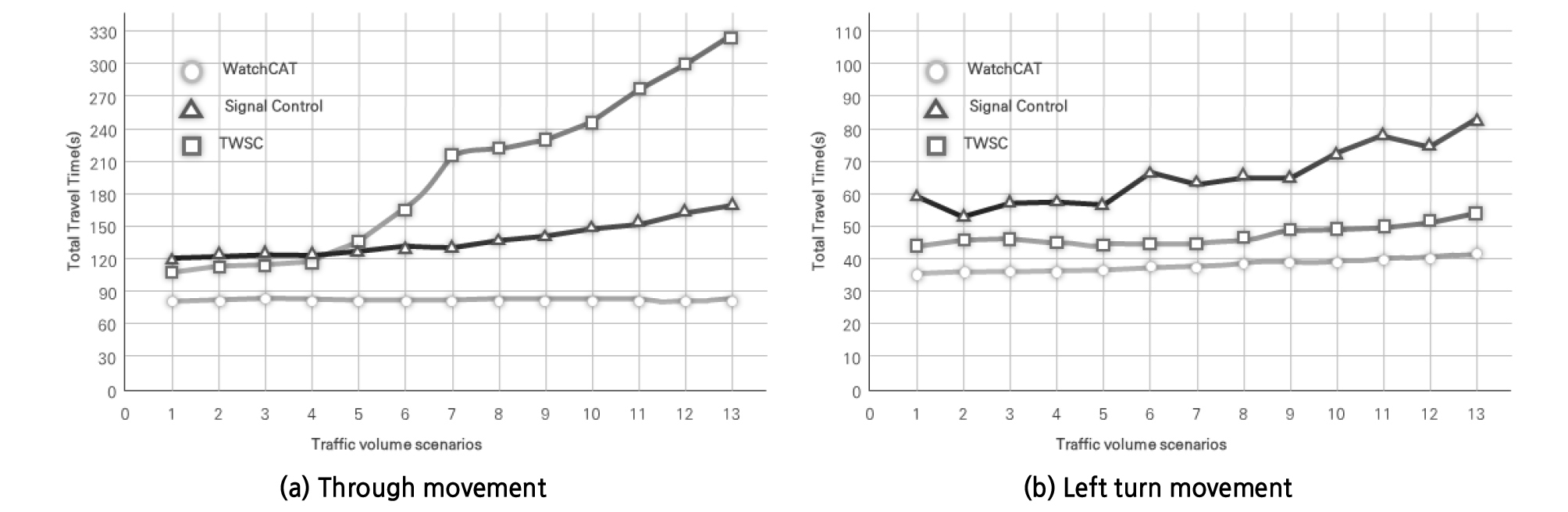
분석결과 교통량의 차이에 따라 교차로 통행시간에 차이점이 있는 것으로 나타났다. 직진 통행시간은 교통량이 낮은 경우 통행시간에서 미세한 차이만 있지만, 교통량이 가장 높은 경우 정주기식 신호 제어, TWSC, WatchCAT 순으로 통행시간 차이가 크게 나타났다. 좌회전의 경우 WatchCAT과 정주기식 신호제어, TWSC의 차이는 전구간 비슷한 것으로 나타났다. 좌회전 통행시간의 경우 회전 차량 비율이 낮은 항만 통행 특성을 고려한 모의실험 구성으로 인해 직진 교통량의 통행시간과 차이가 발생하였다.
결론
본 연구는 항만 컨테이너 야적장에서 지속적으로 문제가 제기되고 있는 안전시거 미확보에 대한 문제를 차량 위치 정보를 기반으로 잠재적 교통 상충 발생을 판단하고 대응하는 모형인 WatchCAT 알고리즘을 제안했다. 연구결과 제안된 WatchCAT 모형이 기존 운영방식인 TWSC, 정주기 방식 교통신호 운영법보다 교차로 효율성을 유지하면서 안전관리방안이 도입 가능한 것으로 확인되었다.
본 연구결과를 현장에서 적용할 경우, 컨테이너 야적장의 안전시거 미확보로 인한 교통 상충 문제점을 해결해 나갈 수 있을 것으로 기대된다. 또한, 항만 컨테이너 야적장 사고 감소로 인한 경제적 측면에서의 손실 저감이 가능할 것이다. 특히 교통 공학적인 관점에서 현재까지 ‘사도’로써 관리가 어려웠던 항만 컨테이너 야적장의 교차로 안전관리를 수행할 수 있을 것으로 기대된다.
본 연구에서는 항만 야적장의 교차로 효율성 측면에서 개발된 모형을 분석하였다. 안전 측면에서의 효과는 현장 유사환경 구축을 통해 안전성 평가를 진행예정이다. 현장실험에 앞서 가상환경에서 안전 측면의 효과분석을 진행할 필요성이 있다. 또한, 본 논문의 경우 항만 교차로 1개소에서만 분석을 진행해 전체 야적장을 기준의 효과분석을 진행하지 못한 한계가 있다. 추후 앞서 제시한 한계점을 보완할 연구가 필요하다.
1)항만 도로 제한속도는 20km/h로 컨테이너 트럭이 추월을 위하여 갑작스러운 차로변경을 수행하지 않는 것이 일반적이다.
2)이는 센터에서 모든 차량의 이동을 통제하는 미래지향적 운영방법이나, 컨테이너 운전자가 존재하는 현재의 운영 상황에서 현실적이지 않다.
