

서론
기존 문헌 고찰
1. 자율주행차량 관련 연구
2. 버스 전용차로 관련 연구
3. 기존연구와의 차별성
분석 방법론
분석 결과
1. 자율주행버스의 전용차로 진입여부 분석결과
2. 자율주행버스의 전용차로 진입 영향권 안전성 분석 결과
결론
서론
최근 정보통신기술의 발달 및 자동차기술의 발달로 인하여 도래할 차세대 기술혁신 중 차량 기반 기술의 변화를 통해 시스템에 큰 영향을 미칠 것으로 예상된다. 특히, 자율주행차량은 관련 감지 기술 및 관련 인식 기술, 제어기술들의 발달로 Prototype화 되었으며 통신 기술은 차량 간 통신(Vehicle to Vehicle, V2V) 및 차량과 인프라 간 통신(Vehicle to Infrastructure, V2I)을 제공한다(Talebpour and Mahmassani, 2016).
초기 자율주행자동차 도입 단계 에서는 비자율차와 혼재하는 교통류 상황이 발생할 가능성이 높기 때문에 자율협력주행환경에서 자율차 대상 연구 뿐만 아니라 비자율차와 상충 행태를 이해하는 것이 중요하다(Lee and Oh, 2017). 따라서 자율주행자동차 초기 상용화 단계에는 자율차와 비자율차의 마찰을 최소화하도록 전용차로를 설계하고 운영하는 방안을 검토할 수 있다. 현재 특정 차량전용 차로를 부여하는 사례로는 버스 전용차로가 있으며 혼잡한 구간에서 버스 통행시간을 절감하여 수단경쟁력을 강화하기 위해 도입되었다(Shalaby and Soberman, 1994). 하지만 버스전용차로는 안전성 측면에서 특히 고속도로 연결로 구간, 즉 주행속도가 다른 도시부도로나 다른 고속도로와 물리적으로 연결되는 상황에서 전용차로 진입과 진출과정 중 교통사고 위험성이 커질 수 있다(Yun et al., 2012). 그렇기 때문에 향후 자율주행차량이 상용화 되었을 때 버스전용차로의 안전한 운영을 위해 사고위험도를 낮출 수 있는 연구와 분석을 통해 기준을 마련해야한다.
따라서, 본 연구의 목적은 향후 자율주행차량이 도로에 비자율차량과 혼재하는 상황에서 전용차로를 설계 및 운용할 때, 현실적으로 가장 먼저 도입될 가능성이 있는 자율주행버스 전용차로에 대한 유입부의 자율주행버스 진입 영향권에 길이 대하여 교통량 및 자율주행버스의 보급률(Market Penetration Rate, MPR)에 따라서 전용차로 진입 가능 여부를 시뮬레이션을 통하여 검토하고 진입 가능한 대안에 대하여 상충분석을 수행 및 비교분석하여 안전성을 고려한 적정 영향권 길이를 제시하는 것이다.
본 연구의 구성은 다음과 같다. 2장에서는 교통 시뮬레이션을 이용하여 자율주행 관련 연구에 관한 기존 연구들을 고찰하였다. 3장에서는 본연구의 분석 방법론을 총 3단계로 제시하였으며, 자율주행 차량의 주행행태설정, 분석 시나리오설정, VISSIM Network 구축 및 효과지표 분석에 대한 내용을 각각 제시하였다. 4장에서는 분석결과를 제시하였으며, 마지막 장에는 본 연구에서 도출된 결론 및 향후 연구과제를 제시하였다.
기존 문헌 고찰
본 연구의 문헌 고찰은 기존 자율주행 차량과 관련된 연구와 버스전용차로와 관련된 연구를 중심으로 수행하였다.
1. 자율주행차량 관련 연구
Yook et al.(2018)는 미시적 교통류 시뮬레이션 소프트웨어 중 하나인 VISSIM을 이용하여 자율주행차량의 보급률에 따른 용량의 변화를 비교분석하였으며 그 결과, 높은 등급의 도로(고속도로)일수록 자율주행차량의 혼입에 따른 효과가 가장 큰 것으로 도출되었으며 보급률이 80%일 때 자율주행차량으로 인한 효과가 반감되어 자율주행차량의 전용도로를 추진 할 필요성이 없다는 것을 제시하였다. VanderWerf et al.(2001)는 자율차의 시스템 보급률에 따라서 교통류 성능에 영향을 미친다고 설명하였다. Davis(2004)는 현재 도로네트워크에서는 자율주행차량이 주행하고 있지 않기 때문에 관련 분석을 다양한 시나리오를 바탕으로 하는 시뮬레이션을 이용한 방법론을 이용할 수 있다고 제시하였다. Kesting et al.(2008)는 진입램프에서의 자율주행차량의 보급률에 따른 안전성을 분석하였으며 자율주행 차량의 보급률 이증가함에 따라 교통 안전성이 증대되었다. Park et al.(2015)는 테스트베트 구축 예정인 경부고속도로의 서울-신갈 기본구간을 대상으로 자율주행차량의 도입에 따른 NetLogo 5.2.0 시뮬레이션 효과분석을 수행하였으며 그 결과 속도의 증가 및 밀도의 감소 효과는 서비스수준 B 교통량을 기점으로 발생하여 교통류에 긍정적인 영향을 미치는 것으로 도출되었다.
2. 버스 전용차로 관련 연구
Kim et al.(2013)는 중앙버스전용차로가 시행되고 있는 고속도로는 버스가 전용차로에 진입 및 진출하면서 본선 차량흐름에 방해를 주어 차량 간의 상충을 야기 시킴을 제시하였다. Shen et al.(2019)는 도로의 용량과 버스의 비율에 따른 관계성을 파악하기 위해 차량추종 및 차로변경행태를 개발하였으며 시뮬레이션의 결과로 버스의 비율이 증가함에 따라 도로 용량에 상당한 영향을 미친다는 결론을 도출하였다. Park et al.(2015)는 버스전용차로가 포함된 경부고속도로에서 버스전용차로가 미치는 영향을 평가하기 위해 CTM (Cell Transmission) 시뮬레이션 분석을 수행하였으며 버스전용차로의 시점에 따라 운영효율성이 변화하였다. Chen et al.(2010)는 미시적 교통류 시뮬레이션(VISSIM)을 활용하여 전용차로의 위치, 진출입램프의 길이, 영향권의 길이 등에 따른 도시 고속도로의 버스전용차선 설치로 인한 용량분석을 수행하였으며 진출입로에 따라 영향권의 길이가 용량에 더욱 민감하다는 결과를 도출하였다. Choi and Choi(1995)는 서울에서 신탄진 까지 지역 간 고속도로에서 버스전용차로의 상황을 승용차 및 버스의 총 통행시간절감 측면에서 평가하였다.
3. 기존연구와의 차별성
앞서 제시한 기존 연구와 본연구와의 차별성은 총 3가지로 다음과 같다. 첫째, 기존연구에서는 주로 자율주행 자동차에 대하여 분석을 수행하였지만 본 연구에서는 향후 자율주행버스에 대한 전용차로가 현실적으로 먼저 설치 및 운영된다는 가정 하에 자율주행 버스에 대한 분석을 수행하였다. 둘째, 기존 연구에서는 자율주행전용차로와 관련하여 주로 고속도로 본선부에서의 효과분석을 수행하였지만 본 연구에서는 향후 자율주행버스의 전용차로를 운영함에 있어 고속도로의 본선부보다 차량들이 본선으로 진입하는 유입 영향권에서의 교통사고 위험성이 크기 때문에 해당 구간에 대해 자율주행버스가 안전하게 전용차로로 진입해야 한다는 가정을 가지고 분석을 수행하였다. 마지막으로 기존 연구에서는 자율주행차량 전용차로를 도입하여 발생 하는 효과를 주로 통행속도 및 통행시간을 통한 운영효율성 효과분석을 수행하였지만 본 연구에서는 상충건수를 비교분석을 통한 안전성을 평가하였다.
분석 방법론
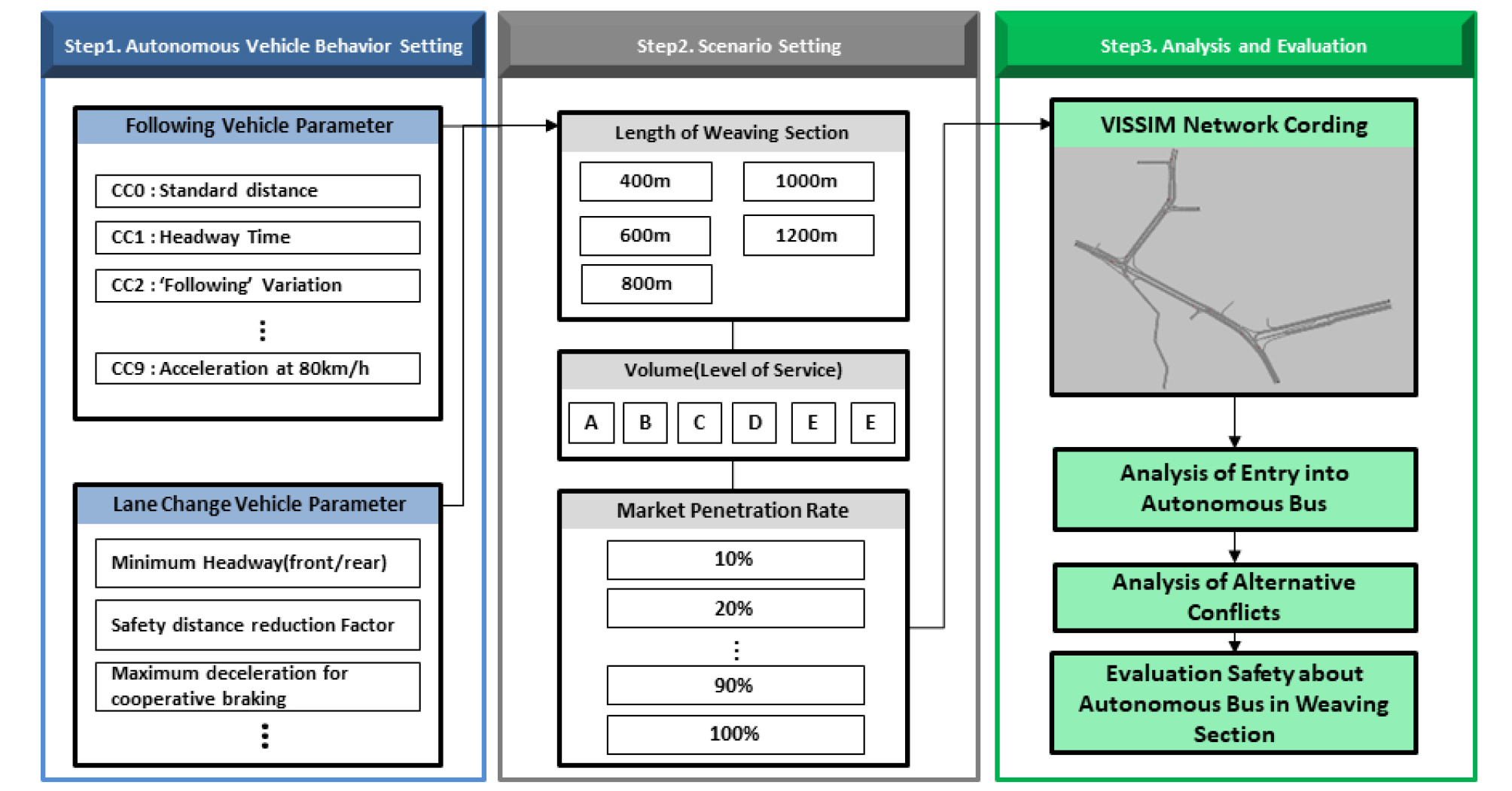
본 연구에서는 Figure 1에 제시한 바와 같이 총 3단계의 절차에 따라서 분석을 수행하여 자율주행버스 전용차로에 관한 안전성을 분석하였다.
1단계. 자율주행버스 주행행태 설정
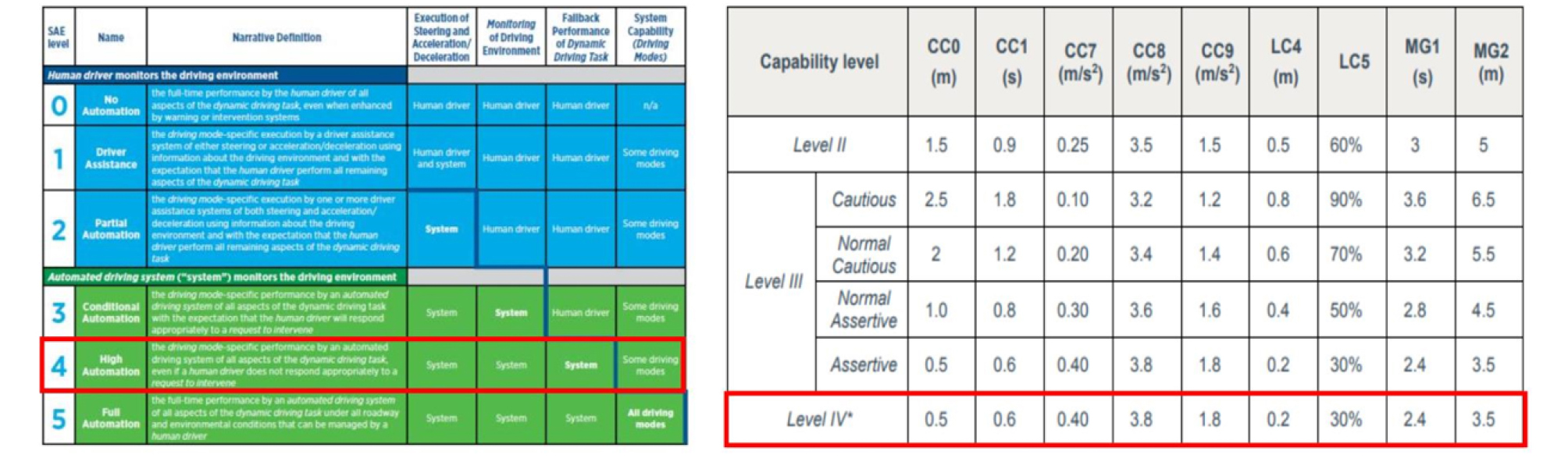
자율주행 수준과 그에 맞는 VISSIM 내부 파라미터의 수정을 통하여 자율주행 행태를 설정하였다. 자율주행 수준의 경우 SAE International(2016)에서 제시하는 총 6단계의 자율주행수준 중 4단계인 High Automation을 적용하였으며 ATKINS(2016)에서 제시하는 자율주행 수준 4단계에 해당하는 VISSIM 내부 파라미터 중 Following Vehicle Parameter와 Lane Change Vehicle Parameter를 Figure 2와 같이 수정하였다.
2단계. 분석 시나리오 설정
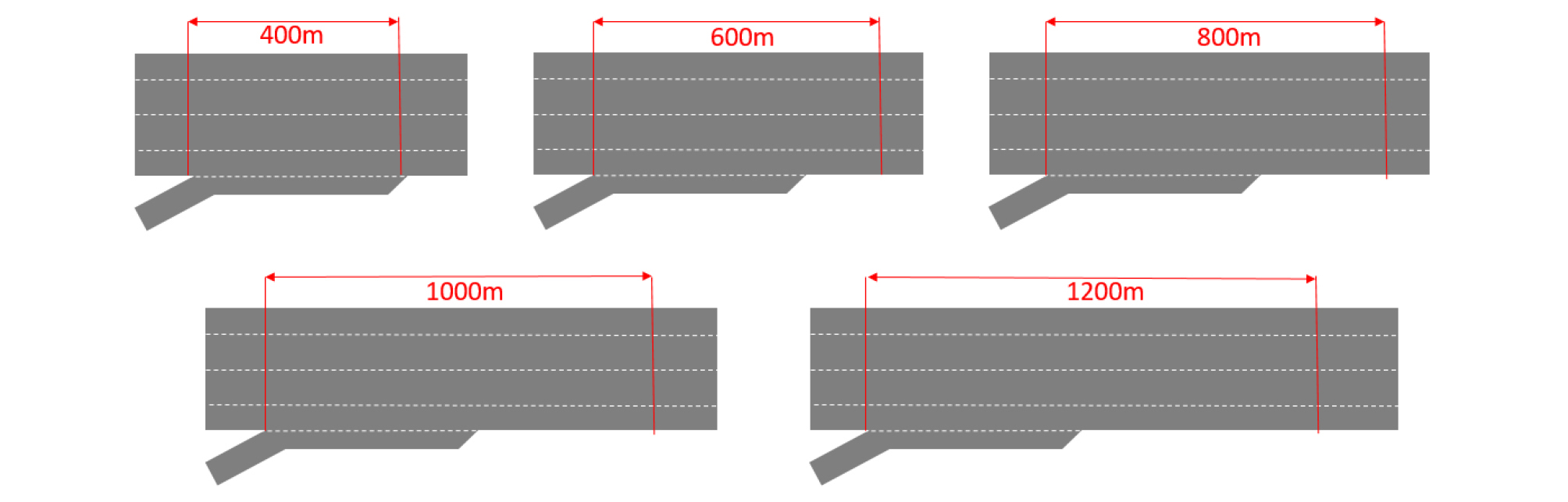
분석 시나리오는 영향권의 길이, 교통량(서비스수준), 자율주행버스의 보급률에 대하여 각각 설정하였다. 영향권 길이의 경우, Ministry of Land Transport and Maritime Affairs(2013)에서 제시하는 고속도로 진입로 영향권 기준(400m)을 포함하여 추가적으로 600m, 800m, 1000m, 1200m에 대한 시나리오를 설정하였으며 이는 Figure 3과 같이 설정하였다.
교통량(서비스수준)의 경우 Ministry of Land Transport and Maritime Affairs(2013)에서 제시하는 고속도로의 설계속도 100kph에서의 서비스수준별 교통량을 이용하였으며 Table 1에 제시하였다. 또한 차량비율의 경우 TMS (Traffic Monitoring System)에서 제공하는 분석구간에서의 차종별(승용, 버스, 화물) 연평균 일일교통량(Annual Average Daily Traffic, AADT)을 활용하여 대상구간의 실제 차량비율을 반영하였다.
Table 1. Level of service
자율주행버스의 보급률의 경우, 버스의 총교통량에서 자율주행버스의 비율을 각각 10%, 20%, 30%, 40%, 50%, 60%, 70%, 80%, 90%, 100%로 설정하여 분석을 수행하였다.
3단계. Network 구축 및 효과지표 분석 설정
3단계에서는 1단계의 자율주행버스의 주행행태와 2단계의 각 시나리오를 설정한 이후, 분석대상지역의 Network에 구현하고 각 대안별 시뮬레이션 실험을 진행한 이후 자율주행버스의 전용차로 진입 가능여부 검토 및 대안별 SSAM 상충분석을 통하여 전용차로 유입 영향권에 대한 안전성을 평가하였다. 분석대상구간의 경우, Gyeonggi Transportation Information Center(2017)에서 제시하는 상습 지 ‧ 정체 구간 중 판교JC-금토JC (상행)를 분석구간으로 설정하였으며 시뮬레이션 실험 시 신뢰성을 높이기 위하여 Random seed (난수)를 다르게 적용하여 각 시나리오를 5회 수행하였다. 분석결과는 5회 수행결과의 평균값을 제시하였다. 시뮬레이션 분석시간은 5400초(90분)로 설정하였으며, 분석 대상지역의 네트워크에 교통량이 고르게 분포된 이후에 분석을 수행하기 위하여 Warm-up을 시뮬레이션 실험 시작 직후 및 종료 직전의 900초(15분)로 설정하였다. VISSIM 실험 진행과정을 직접 관찰하면서 각 대안에서 자율주행버스가 전용차로로 진입하는지에 대한 가능여부를 직접 검토하여 가능한 대안들을 선별하고 진입에 필요한 최소 영향권을 산출하였다. 이후 가능한 대안들에 대한 주행궤적데이터를 추출하여 SSAM 상충분석을 수행하고 결과를 비교하여 유입 영향권의 안전성을 평가하였다.
분석 결과
1. 자율주행버스의 전용차로 진입여부 분석결과
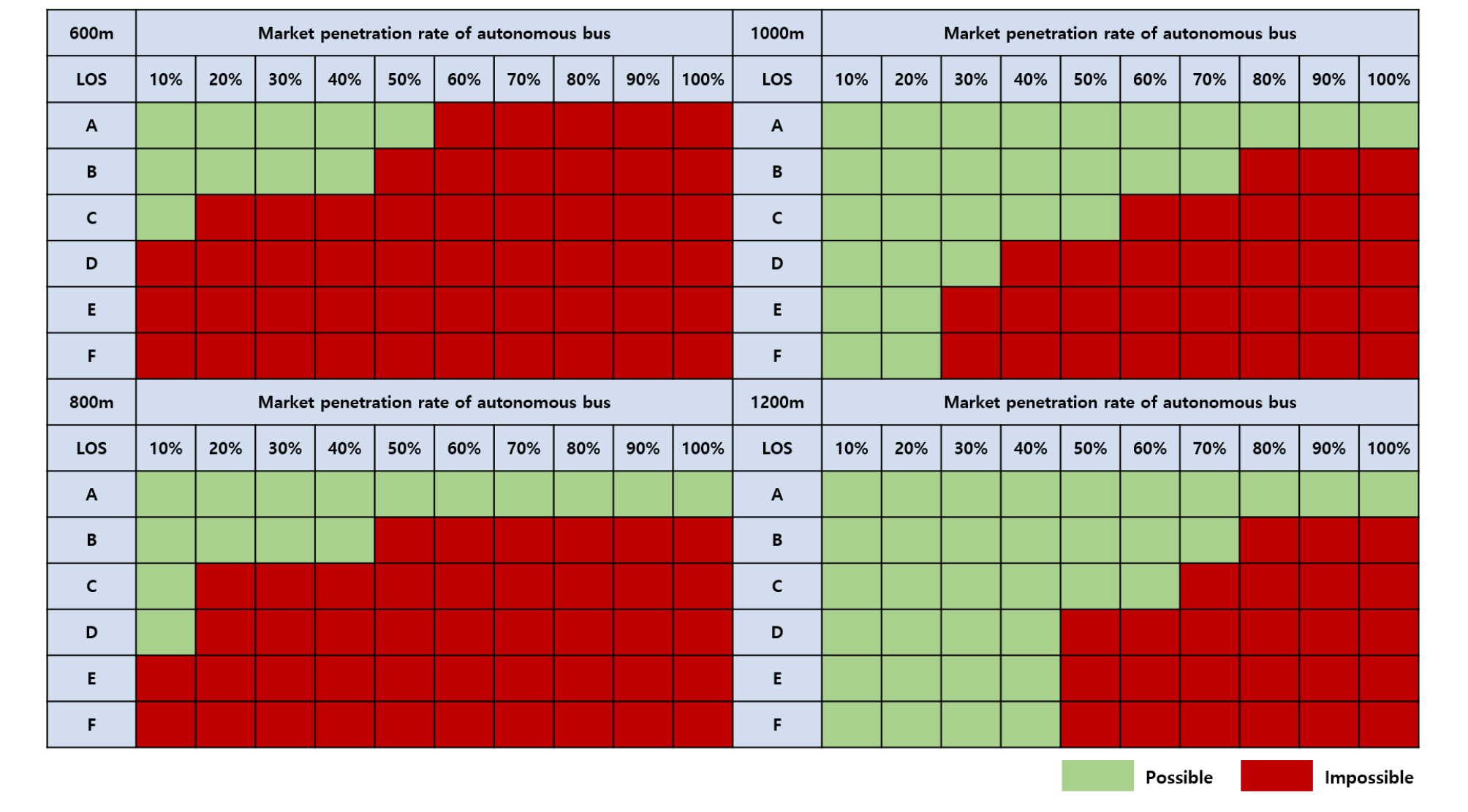
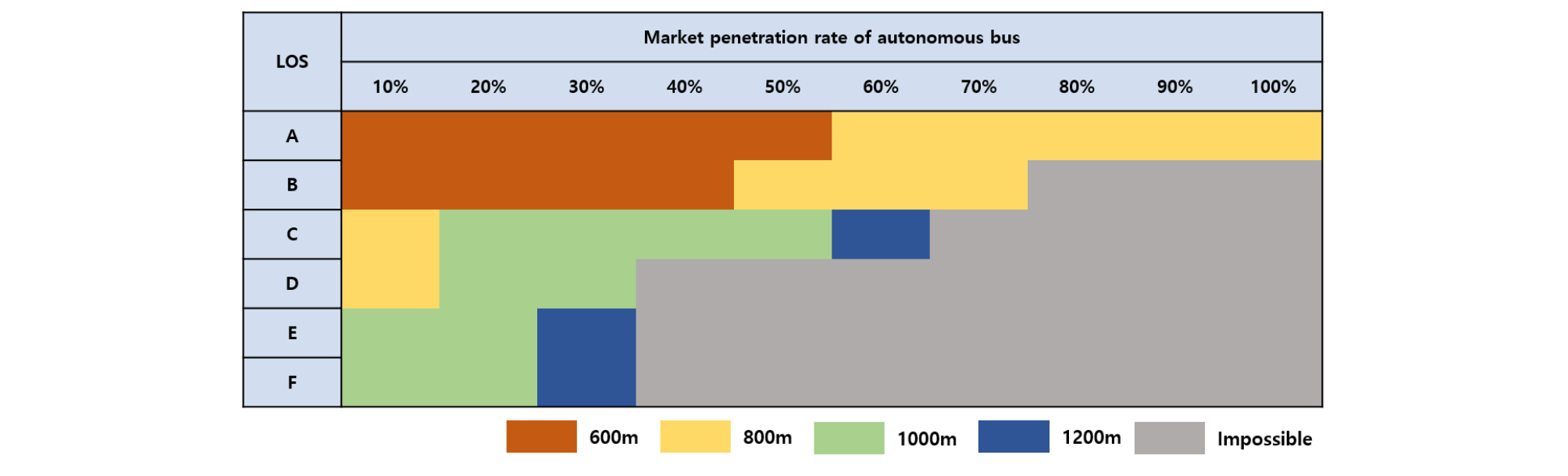
분석결과, 영향권 길이가 400m인 경우에서는 모든 시나리오에 대하여 자율주행버스가 전용차로로 진입하는데 있어서 어려움이 있었으며, Figure 4는 영향권 400m 시나리오를 제외한 각 대안에 따른 자율주행버스의 전용차로 진입여부 분석결과이다. 진입 영향권의 길이가 600m인 경우, 서비스수준이 A일 때 자율주행버스의 보급률이 50%, 서비스수준이 B일 때 자율주행 버스의 보급률이 40%, 서비스수준이 C일 때 자율주행버스의 보급률이 10%까지는 전용차로로 진입이 가능하였다. 진입영향권의 길이가 800m인 경우, 서비스수준이 A일 때 자율주행버스의 보급률이 100%, 서비스수준이 B일 때 자율주행 버스의 보급률이 40%, 서비스수준이 C-D일 때 자율주행버스의 보급률이 10%까지는 전용차로로 진입이 가능하였다. 진입영향권의 길이가 1000m인 경우, 서비스수준이 A일 때 자율주행버스의 보급률이 100%, 서비스수준이 B일 때 자율주행 버스의 보급률이 70%, 서비스수준이 C일 때 자율주행버스의 보급률이 50%, 서비스수준이 D일 때 자율주행버스의 보급률이 30%, 서비스수준이 E-F일 때 자율주행버스의 보급률이 20%까지는 전용차로로 진입이 가능하였다. 진입영향권의 길이가 1200m인 경우, 서비스수준이 A일 때 자율주행버스의 보급률이 100%, 서비스수준이 B일 때 자율주행 버스의 보급률이 70%, 서비스수준이 C일 때 자율주행버스의 보급률이 60%, 서비스수준이 D-F일 때 자율주행버스의 보급률이 30%까지는 전용차로로 진입이 가능하였다. 분석 결과를 종합하면 각 서비스 수준에 따라 자율주행버스 전용차로의 설치 적정성을 확인 할 수 있다.
분석 결과를 종합하여 각 서비스수준 및 자율주행버스의 보급률에 따라 자율주행버스가 전용차로로 안전하게 진입하기 위한 최소 영향권의 길이를 Figure 5에 제시하였다. 서비스수준 및 자율주행버스의 보급률이 증가함에 따라 자율주행버스가 전용차로에 안전하게 진입 가능한 최소 영향권의 길이가 점차적으로 증가하였으며 분석 결과를 향후 자율주행버스의 전용차로 설치 및 운영 시 고려해야 할 최소 영향권의 길이가 도출되었다.
2. 자율주행버스의 전용차로 진입 영향권 안전성 분석 결과
자율주행버스의 전용차로 진입이 가능한 대안들에 한하여 SSAM을 통한 상충분석을 수행하여 각 영향권의 길이 중 설정한 교통량, 자율주행버스의 보급률에 대해 상충건수가 가장 낮은 대안을 선정하였으며 가장 안전하게 자율주행버스 전용차로를 설치 및 운영하기 위한 유입부 영향권의 길이를 Table 2에 제시하였다.
Table 2. Result of conflict analysis
서비스수준이 A일 때 자율주행차량의 보급률이 30% 및 90%인 경우 영향권의 길이가 1000m일 때 상충건수가 가장 낮고, 나머지 자율주행 차량의 보급률 대안들에서는 영향권의 길이가 1200m인 경우 상충건수가 가장 낮아 가장 안전한 영향권의 길이로 선정되었다.
서비스수준이 B일 때 자율주행차량의 보급률이 10% 및 30%인 경우 영향권의 길이가 1000m일 때 상충건수가 가장 낮고 자율주행차량의 보급률이 20%일 때와 40% 이상일 때 영향권의 길이가 1200m인 경우 상충건수가 가장 낮아 가장 안전한 영향권의 길이로 선정되었다.
서비스수준이 C일 때 모든 자율주행차량의 보급률 시나리오에 대해 영향권의 길이가 1200m인 경우 상충건수가 가장 낮아 가장 안전한 영향권의 길이로 선정되었다.
서비스수준이 D일 때 자율주행차량의 보급률이 10%인 경우 영향권의 길이가 800m일 때 상충건수가 가장 낮게 도출되었으며, 자율주행차량의 보급률이 20% 이상인 경우 영향권의 길이가 1000m일 때 상충건수가 가장 낮아 가장 안전한 영향권의 길이로 산정되었다.
서비스수준이 E일 때 자율주행차량의 보급률이 10%인 경우 영향권의 길이가 1000m일 때 상충건수가 가장 낮고, 자율주행차량의 보급률이 20-30%인 경우 영향권의 길이가 1200m일 때 상충건수가 가장 낮아 가장 안전한 영향권의 길이로 선정되었다.
서비스수준이 F일 때 자율주행차량의 보급률이 10-20%인 경우 영향권이 길이가 1000m일 때 상충건수가 가장 낮고, 자율주행차량의 보급률이 30%인 경우 영향권의 길이가 1200m일 때 상충건수가 가장 낮아 안전한 영향권의 길이로 선정되었다.
결론
본 연구는 미시적 교통류 시뮬레이션 소프트웨어 중 하나인 VISSIM을 이용하여 자율주행버스의 보급률, 교통량(서비스수준) 시나리오에 따라서 설정한 영향권 길이 내에서 전용차로로의 진입 가능성을 검토하고 진입하기 위한 최소 영향권의 길이를 제시하였으며, 가능한 대안들을 토대로 상충분석을 수행하여 영향권의 안전성을 평가하고 영향권 선정의 기준을 제시하였다. 본 연구의 분석 결과 자율주행버스의 전용차로 진입 여부 평가 결과 400m의 경우에는 모든 교통량과 보급률 시나리오에서 전용차로 진입이 불가능하였으며, 600m, 800m, 1000m, 1200m의 경우, 부분적으로 전용차로 진입이 가능한 것으로 도출되었다. 이를 토대로 향후 자율주행버스 전용차로를 설치 및 운영하는데 있어 운영차로의 설치 적정성을 검토 할 수 있을 것으로 예상된다.
또한 자율주행버스가 전용차로로 진입이 가능한 대안들을 대상으로 자율주행버스의 진입 안전성 분석 결과, 설정한 영향권의 길이 중 대부분의 대안에서 1200m가 가장 안전한 영향권으로 도출 되었으며, 일부 대안에서는 영향권의 길이가 800m 및 1000m인 경우에서 가장 안전한 영향권으로 도출되었다. 이는 일부 시나리오에서 영향권의 길이가 늘어남에 따라서 자율주행버스가 차로변경 하는 것에 있어서 발생하는 상충건수 감소효과보다 분석 대상범위가 증가함에 따라 발생하는 차량들의 상충건수 증가 효과가 더 높았기 때문에 발생하였다. 이를 토대로 향후 자율주행버스 전용차로를 보다 안전하게 운영하기 위한 기초자료로 활용될 것으로 기대된다.
하지만, 본 연구에서는 자율주행환경에서의 진입 영향권 안전성을 평가하기 위하여 VISSIM 내부 parameter 값을 조정하여 자율주행버스를 구현하였지만 이는 자율주행버스가 군집주행 하는 행태, 교통량이 많은 경우에서 자율주행버스가 전용차로로 진입하기 위해 급 차로변경 하는 등의 행태가 반영되지 않은 한계점이 있다. 또한 본 연구에서는 자율주행버스의 본선부 진입에 한정하여 분석을 수행하였지만 향후 유출부에서 유출 가능한 영향권의 최소범위 설정 및 안전성 평가도 추가적으로 수행할 예정이며, 본 연구에서 설정한 영향권의 범위는 모든 서비스수준과 보급률에서 진입이 가능하지 않았기 때문에 명확한 비교분석 및 기준을 제시하기 위해서는 향후 더 다양한 영향권 시나리오를 설정해서 분석을 수행할 예정이다.
