

서론
도심도로 자율협력주행을 위한 관련 사항 검토
1. 도심도로 자율주행에 어려움을 주는 상황 및 구간
2. 관련 ISO 동향
3. TR 17424: Local Dynamic Maps concepts
4. ISO 18750 (KS X ISO 18750): Local Dynamic Map
5. LDM 평가체계
6. 기존 LDM 평가체계의 한계
도심도로 자율협력주행을 위한 정보 플랫폼 구성
1. 도심도로 자율협력주행을 위한 LDM 정의
2. 도심도로 자율협력주행을 위한 LDM 플랫폼 구성
정보 플랫폼 평가 방안
1. 적용 가능한 평가 기법
2. 평가항목 및 지표 도출
3. 평가체계 방법으로의 대쉬보드 구성
결론 및 향후연구
서론
자율주행차는 미국의 카네기멜론대학(CMU)의 자율주행 연구팀인 내브랩(NavLab)에서 만든 자율주행시스템인 ’테르게이터(Terregator, Figure 1)’와 쉐보레 밴을 개조한 자율주행차 ‘내브랩1 (Nav Lab1, Figure 2)을 선보인 것을 시작으로 보는 시각이 있다(SAMSUNG Newsroom, 2017). 테르게이터는 영상(비디오 카메라), 소나(거리측정), 스캐닝 레이저거리측정기 등 현재 자율주행에서 사용하는 센서를 장착하고 있었으며 이후 경로 계획 및 매핑 능력 등을 포함하여 점차 진화된 기술이 적용되었다. 반면 내브랩은 사람이 직접 탑승하여 자율주행 모드를 시연한 최초의 자율주행차로, 느린 속도로 이동하였으나 당시의 컴퓨팅 능력을 고려할 때 매우 선도적이고 혁신적인 기술이라 평가받고 있다(Robot Newspaper, 2016).
이와 같은 자율주행 기술은 구글의 X-project를 통해 급속도로 발전 및 확산되기 시작하였다. 카네기멜론대학과 함께 기존 모델에 자율주행시스템을 적용하는데 초점을 두고 자율주행 기술을 개발 및 테스트하였으며, 2009년부터는 도요타의 일반 차량을 개조한 무인 주행 자동차를 개발하여 시험주행에 성공한 바 있다. 현재는 알파벳에서 운영하는 웨이모를 통해 상용서비스를 운영 중에 있다. 구글과는 달리 자체적으로 차량을 개발한 대표적 사례로는 테슬라가 있다. 테슬라는 2014년 AutoPilot이라 명명한 자체 자율주행기술을 발표하였으며, 이는 속도 및 차로유지 및 차로변경이 가능한 자율주행 Level 2단계에 해당하는 기술이다. 테슬라의 자율주행시스템은 현재 상용차 중 가장 우수하다고 평가받을 만큼 시장을 선도하고 있으며, 자율주행차에 대한 보험수가를 고려하여 자체 보험서비스를 도입하는 등 자율주행차의 확산을 위해 기여한 바가 매우 크다 할 수 있다.
상기 두 기업이 선두에서 자율주행차 및 자율주행기술을 리딩하며 4차 산업혁명을 이끌어 갈 핵심기술로 평가받으며 전 세계적인 관심과 연구개발이 집중되고 있는 가운데 2016년 2월 14일 발생한 자율주행차가 원인을 제공한 첫 사고가 발생하였다. 이후 2016년 5월 7일 테슬라의 모델 S차량이 대형 트럭과 충돌하여 운전사가 사망하는 첫 사망사고가 발생하였으며, Figure 3과 같이 2018년 3월 18일 우버의 자율주행차가 교차로를 건너던 행인을 치어 사망하게 한 첫 보행자 사망사고가 발생하며 부정적 인식이 확대되고 있다. 사회적 인식은 부정적인 부분이 확대되고 있다(Segye Ilbo, 2018). 미국 자동차협회(American Automobile Association)에서 시행한 자율주행차 안전성에 대한 소비자 신뢰도 조사 결과에 따르면 미국 운전자의 73%가 자율주행차에 대해 무서움을 느끼고 있으며, 63%가 도로를 자율주행차와 공유하는 것에 대해 불안함을 느끼는 것으로 나타났다. 특히 20세 전후의 최신 기술에 대한 관심도가 가장 높은 젋은층에서도 자율주행차에 대한 불안감이 2017년 대비 급증(49→64%)하였으며, 장년 및 노년층으로 갈수록 이와 같은 불안감은 더욱 커질 것으로 예상된다.

이와 같은 분위기 속에서 자율주행차 및 자율주행기술의 발전을 지속하기 위해서는 사회적 불안감 해소가 필수적이라 할 수 있다. 국내에서는 자율주행 기술을 포함한 미래차 관련 3대 전략을 발표(Ministry of Land, Infrastructure and Transport, 2019)하는 등 자율주행 기술 개발에 박차를 가하고 있는 가운데, 자율주행기술에 대한 불안감 해소를 위해 차량센서 일변도의 기존 기술 개발 방향에서 최근 도로인프라에서 제공하는 정보를 활용하는 ‘자율협력주행기술’이 그 대안으로 선택되고 있다. 여기서 자율협력주행시스템은 신호기 및 교통시설 등을 활용하여 국토교통부령으로 정하는 바에 따라 자율주행기능을 지원 및 보완하여 효율성과 안전성을 향상시키는 도로교통체계를 의미한다(Korea Transportation Safety Authority et al., 2019). 자율협력주행의 원활한 구성을 위해서는 정보를 체계적이고 안정적으로 수집 및 제공할 수 있는 체계가 필요하며 이를 위해 적용하고자 하는 표준 기술이 동적 공간 데이터 저장소 또는 동적정보(Local Dynamic Map, LDM)이다. 본 연구에서는 특히 자율주행차가 주행중에 어려움을 가장 크게 겪는 도심도로 구간을 대상으로 LDM을 적용하기 위한 시스템 구성 및 요구사항을 도출하고, 이를 평가 할 수 있는 방안을 구성하여 제시하였다.
도심도로 자율협력주행을 위한 관련 사항 검토
1. 도심도로 자율주행에 어려움을 주는 상황 및 구간
고속도로는 차량의 이동속도가 빨라 주변 사물을 인지하고 이를 처리하여 자율주행차량을 제어하는데 필요한 시간이 극히 짧다는 것이 극복해야 하는 한계이다. 그러나 중앙분리대로 차로가 구분되어 있을 뿐만 아니라 개활지(터널 제외)에 위치하여 있고, 기하구조가 단순하며 움직임의 자유도가 높은 이동체 및 이동자(이륜차 및 보행자 등)가 없거나 극히 적다. 따라서 고성능의 센서와 처리 프로세서를 갖춘 경우 대처가 가능하며, 이에 따라 상용화된 반자율주행기능을 갖춘 차량으로 자율주행기능을 체험할 수 있는 시대가 되었다.
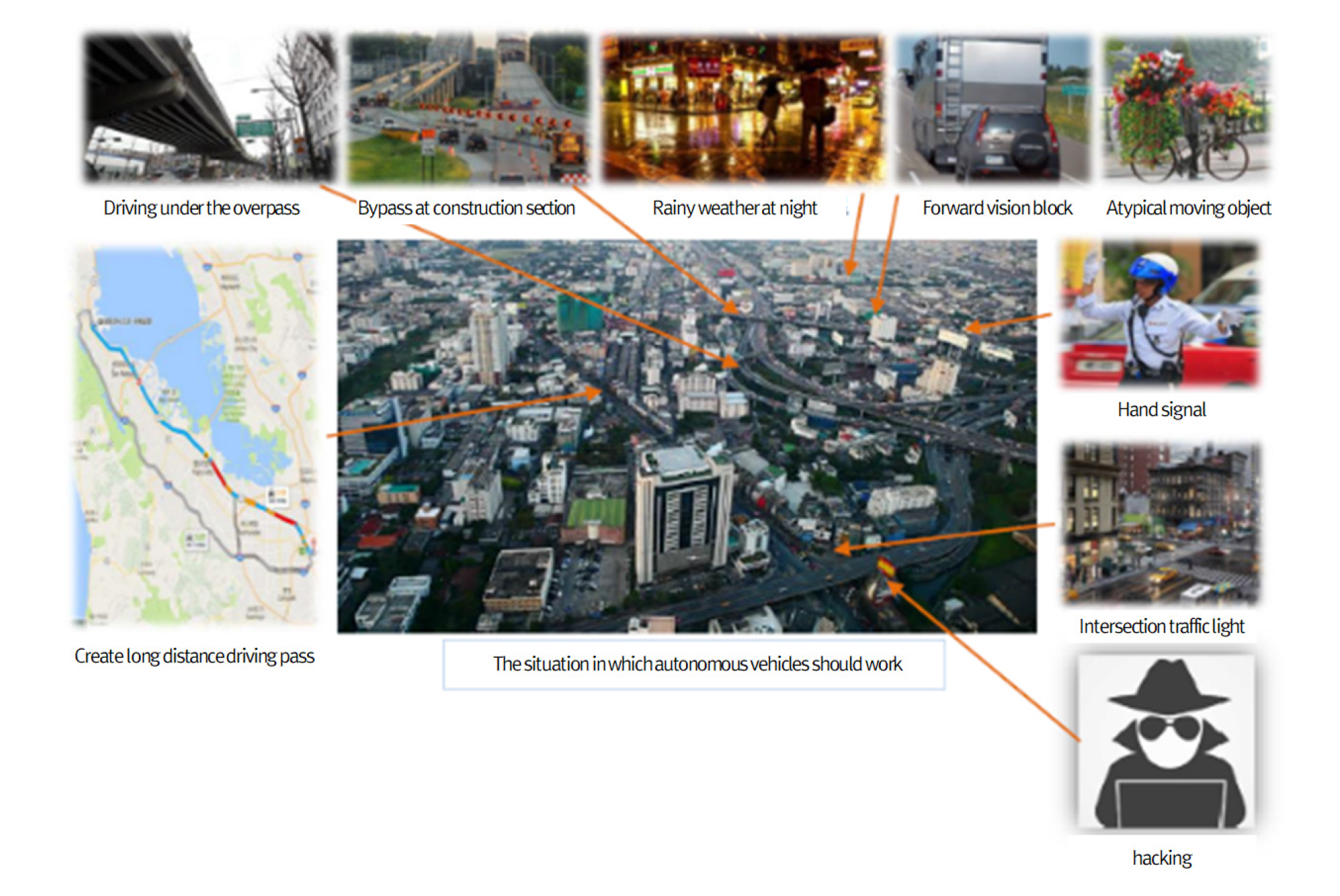
이에 반면 도심도로는 자율주행을 하기에 매우 어려운 구간과 상황이 많이 존재한다. Figure 4와 같이 자차 위치(자율주행차의 자기 위치)를 측정하기 위해 사용하는 GNSS는 빌딩숲 및 고가도로 등의 영향으로 음영구간이 존재한다. 시시각각 변화하는 도로공사구간이 존재하며, 전방에 위치한 SUV차량만으로도 전방 시야가 차단된다. 또한 인도에서 차도로 갑자기 진로를 변경하는 무단횡단자, 최근 더욱 급증한 차량의 사각지대에서 출현하는 자전거 및 오토바이 등의 이륜차와 킥보드, 신호기 고장으로 수신호로 교차로를 운영하는 상황, 딜레마존이 항상 존재하는 교차로 등으로 인해 사람 운전자 또한 즉각적인 대처가 어렵다. 이와 같은 상황 및 구간을 자율주행에 어려움을 주는 ‘자율주행 핸디캡’ 상황 및 구간에 대한 극복방안이 마련되지 않을 경우 도심도로를 대상으로 한 자율주행기술의 실용화는 불가능하다.
이와 같이 자율주행차 센서의 인식범위(약 100-200m) 및 핸디캡을 극복하기 위해 사용한 기술이 LDM이다. 이는 현재 고속도로를 대상으로 국토교통부(국토교통과학기술진흥원)의 ‘자율협력주행을 위한 LDM 및 V2X기반 도로시스템 개발’을 통해 개발(Korea Expressway Corporation, 2019)되고 있는 반면, 고속도로보다 핸디캡 상황 및 구간이 많은 도심도로에 대해서는 연구된 바 없다.
2. 관련 ISO 동향
International Organization for Standardization (국제표준화기구, ISO)는 전체 산업의 국제표준을 담당하고 있다(https://www.iso.org/). 기술별 기술위원회(Technical Committee, TC), 분과위원회(Sub- Committee, SC), 작업반(Working Group, WG)이 구성되어 국제표준을 개발한다. 자율주행 관련 기술은 ITS 관련 국제표준을 담당하고 있는 TC 204 (Intelligent transport systems)에서 표준을 개발하고 있으며, 전반적인 ITS 서비스에 대한 인터페이스, 메시지셋, 프로토콜, 정보교환 규격, 시험방법, 아키텍처 및 통신과 관련된 기반기술에 대한 표준을 다루고 있다. TC 204의 표준화 범위는 Figure 5와 같으며, 여기서 동적정보와 밀접한 관련이 있는 WG는 WG 18 (Cooperative systems) 이며 여기서 제정한 표준은 Table 1과 같다.
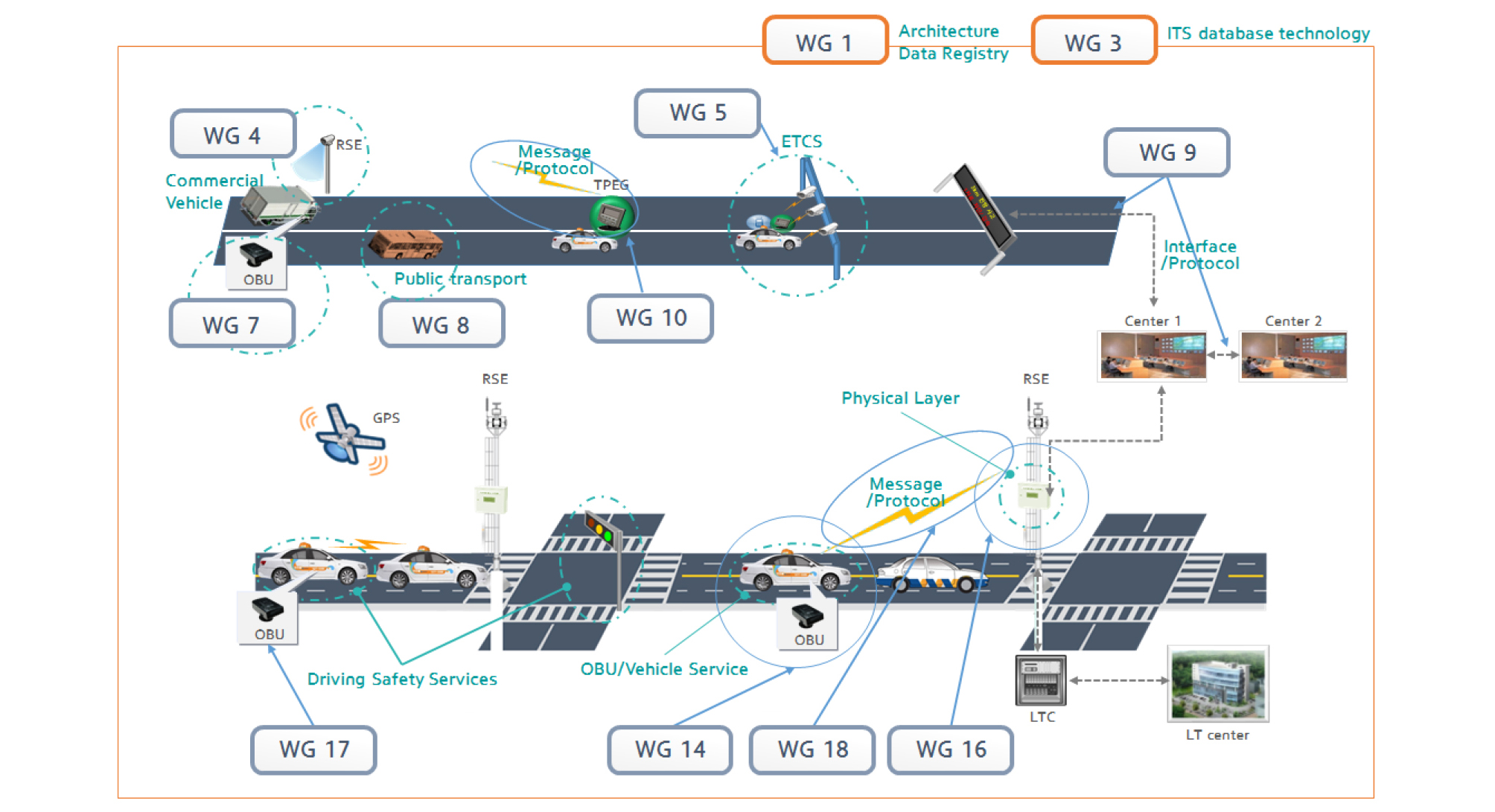
Table 1. List of WG 18 work items
ISO (2019).자율협력주행 혹은 C-ITS에서 활용하는 동적정보에 대하여 규정한 표준은 Table 1의 TR 17424 (ISO, 2015) 및 ISO 18750 (ISO, 2018)이 있다.
3. TR 17424: Local Dynamic Maps concepts
TR 17424는 ISO 24102-6에서 정의한 ‘경로 및 흐름 관리를 위한 ITS 스테이션’에서의 통신 프로토콜을 포함하여 통신을 위한 요구사항 및 목표를 규정하고 있다. 통신방식을 기준으로 정보의 흐름을 Figure 6과 같이 제시하고 있으며, 여기에 LDM을 4개의 Layer로 제시하고 있다. 가장 기본이 되는 지형을 기반으로 도로 형태부터 자차 상태와 함께 다른 차량 정보를 담고 있다. 이와 같은 정보는 타 정보와 함께 융합(fusion)되어 차량의 안전한 주행을 돕도록 구성하고 있다.
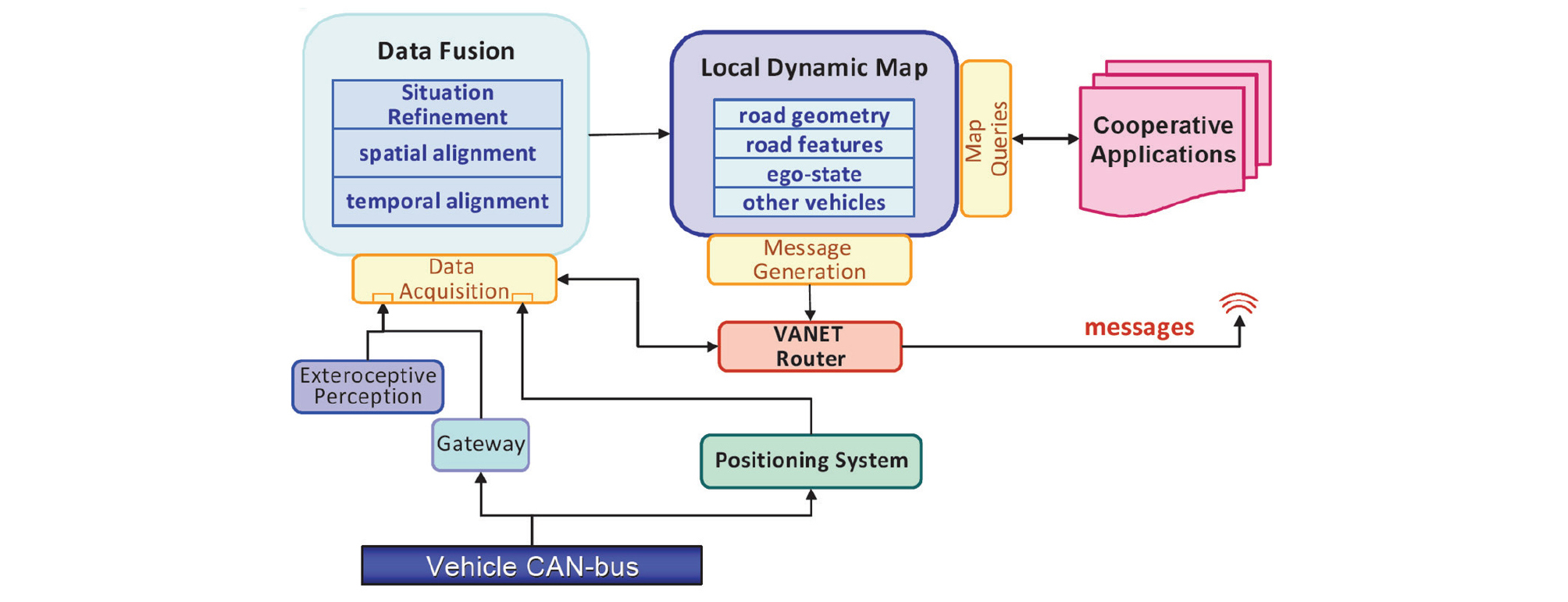
Figure 6.
Driver warning of dangerous situations via Car2X-communication and local dynamic maps
source: ISO (2015).
Figure 7은 도심 교차로의 정보를 저장하기 위한 LDM을 시각화 한 결과이다. 여기서 초록색 선은 참조선(reference tracks)으로 방향별로 차량이 이동 가능한 경로를 나타내고 있다. 일반적으로 기본구간의 동일 차선에서 주행하는 직진, 좌회전, 우회전 차량은 차량 괘적이 동일한 반면, 차량의 주행경로에 따라 별도의 주의정보를 제공하기 위해 임으로 별도의 참조선을 차량의 방향별로 구분하여 제시하고 있다. 즉, 실제 자율주행차량이 이동하기 위한 주행 가이드라인이 아닌, 경로별 정보를 담기 위한 가상의 이동 괘적이라 할 수 있다.
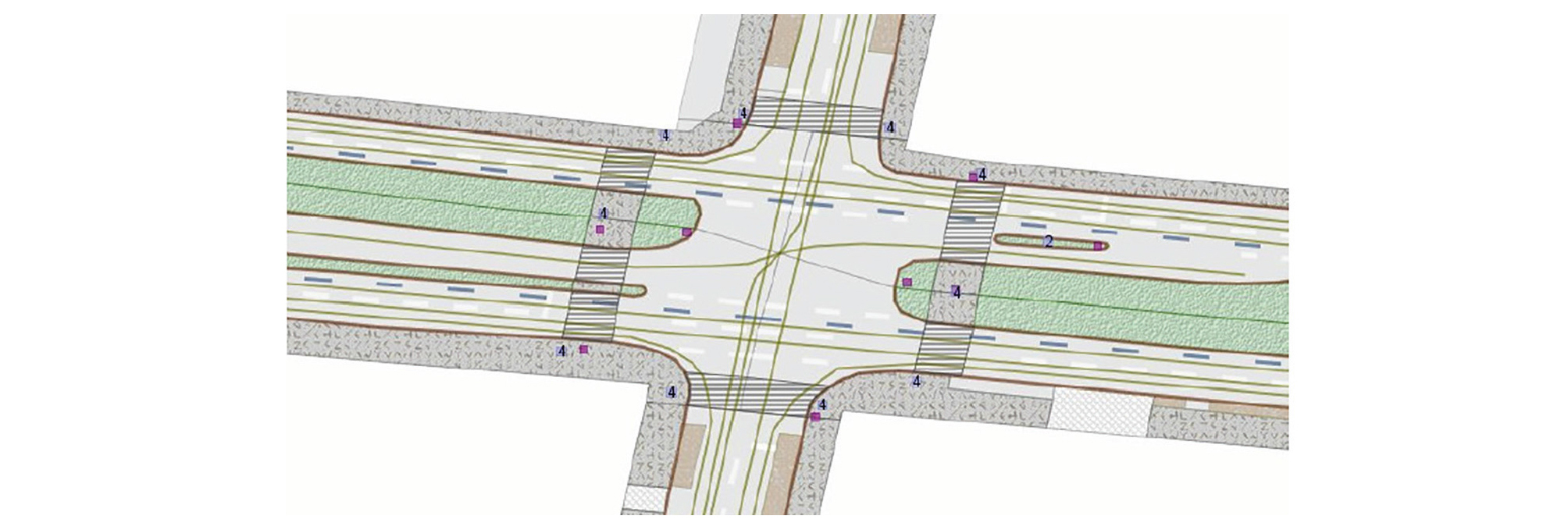
Figure 7.
Visualization of the static map content of the LDM at an urban intersection
source: ISO (2015).
4. ISO 18750 (KS X ISO 18750): Local Dynamic Map
LDM은 국제표준(ISO 18750 (ISO, 2018) 및 KS X ISO 18750 (KS, 2019), 이하 내용은 KS X ISO 18750 내용을 그대로 옮긴 것이다)에 따르면 “LDM 데이터 객체, 서비스 그리고 이러한 LDM 데이터 객체(LDM-DO)의 처리를 위한 인터페이스들로 구성된 개체로 정의하고 있다. 여기서 LDM-DO는 정의된 시간 간격 안에 있는 정의된 지리적 위치와 같은 정의된 위치에 존재하는 실제 객체(차량, 도로 이벤트 등)에 관한 정보를 제공하며, 가장 단순한 경우 LDM-DO가 제공하는 정보는 단지 유형, 지리적 위치 그리고 유효한 시간간격이다.” 상기 내용을 보다 쉽게 설명하면 정밀전자지도를 기반으로 랜드마크(위치 참조시설), 교통정보, 기상정보, 자차정보를 차로 수준으로 매핑하여 관리(저장, 관리, 제공)하는 고도화된 데이터 처리 시스템이라 할 수 있다.
LDM은 유럽의 SAFESPOT과제(SAFESPOT Integrated Project(2007))에서 처음 컨셉을 제시하였으며, 이는 Figure 8과 같다. 정적(Static)정보부터 동적(Dynamic)정보까지를 대상으로 정보를 4개의 Layer로 구분하여 정보를 체계적으로 관리할 수 있도록 하였다. 앞서 설명한 바와 같이 LDM은 고속도로에 적용하여 Table 2와 같이 구축 ‧ 시험한 바 있으나, 실 적용 및 실시간 데이터 저장 ‧ 관리 ‧ 제공까지에 대한 실증은 이루어지지 못하였다. 또한 도심도로 구간에 대해서는 LDM 데이터에 대한 정의 또한 시행된 바 없다. 따라서 도심도로의 안전한 자율주행을 위해 도심도로에 적합한 정보 플랫폼을 구성하고, 이에 대한 평가체계를 마련한 후 실제 적용을 통한 평가가 이루어져야 할 것이다.
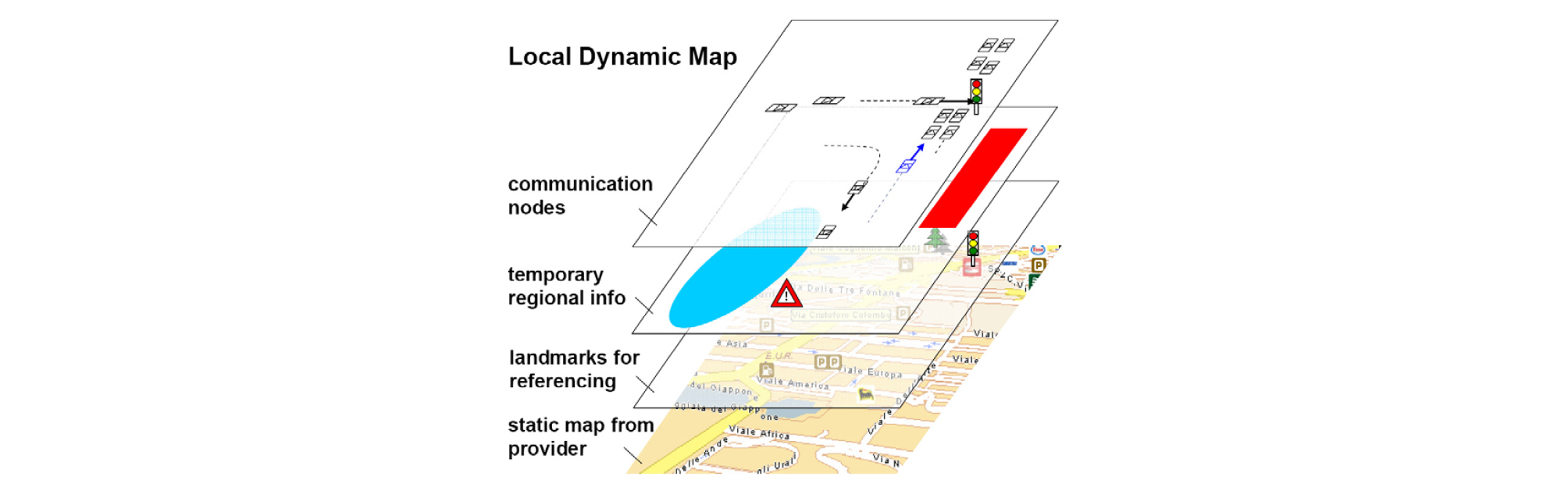
Table 2. Definition of LDM layer for highway
Korea Expressway Corporation (2019).5. LDM 평가체계
국외 뿐만 아니라 국내에서도 국토교통부에서 발주한 ‘스마트 자율협력주행 도로시스템 개발’ R&D 등 다양한 연구개발을 통해 LDM의 개발 및 테스트 등이 이루어지고 있다. 구축한 LDM은 자율협력주행 또는 C-ITS 차량의 운행 중 안전에 직결될 수 있으므로 각 연구개발시에 반드시 평가체계가 포함되어 있다. 그러나 이와 같은 평가체계는 국내 뿐만 아니라 국외에서도 제공되는 정보는 신뢰도를 보장한 상태에서 이루어지며, 따라서 통신 환경, 정보를 받은 차량의 자동 제어 부분 등 차체 거동과 관련된 부분 등으로 평가가 제한되어 있다.
이와 같은 평가체계로 제한된 것에 대한 이유는 ISO와 함께 대표적인 표준화 기구인 European Telecommunication Standards Institute (유럽전기통신표준화기구, ETSI) C-ITS 및 자율협력주행과 관련된 표준의 이론적 근거와 지침을 제시하고 있는 ETSI TR 102 863 (ETSI, 2011)에서 찾을 수 있다. 상기 문서의 평가(evaluation) 부분에 따르면 LDM (동적정보)을 업데이트(갱신 등)하는 방법은 구현의 문제이므로 표준으로 제시하고 있지 않으며, 개별적인 메커니즘에 의해 이루어진다고 제시하고 있다.
LDM 평가 관련 학술연구인 Hideki et al.(2015)의 논문에서 LDM 평가를 위한 시스템 정의 및 평가지표가 제시되어 있다. 국내 LDM 관련 연구 또한 Hideki et al.(2015)의 평가지표와 동일한 지표를 대부분 사용하고 있다. 제시된 평가지표 및 평가방법은 Equation 1과 같다.
차량에게 제공되어야 하는 정보가 차량에게 전달되는데 까지 소요되는 응답시간(response time)을 산출하는 식으로 이와 같은 식만으로 LDM을 평가하도록 되어 있다. 해당 논문 또한 실제 데이터가 존재하지 않으므로 시뮬레이션을 통해 평가를 시행하였으며, 평가 결과 위험정보 감지(충돌 감지) 어플리케이션의 작동 프로세스에는 문제가 없는 반면 차량이 증가함에 따라 LDM 내부 프로세싱에 발생하는 부하 및 부하 발생에 따른 정보 손실에 대한 처리가 필요함을 결론으로 제시하고 있다. 이와 같은 측면에서 정보의 손실율(네트워크상에서 이동중에 손실되는 데이터 양)에 대한 평가가 최근 연구에는 포함되어 진행되고 있다. 국내에서는 스마트 자율협력주행 도로시스템 개발에서 응답시간, 손실율을 기준으로 LDM 정보에 대한 평가를 제시하고 있다.
6. 기존 LDM 평가체계의 한계
이와 같이 도로 ‧ 교통 정보를 담고 있는 LDM의 핵심이 LDM에 포함되어 있는 정보의 신뢰도 보다는 정보의 이동중에 손실없이 빠르게 전달되는데 집중되어 있으며, 이에 따라 LDM에 포함된 정보의 신뢰도는 상대적으로 간과되고 있는 것이 현 연구 체계의 한계라 할 수 있다.
이에 본 연구에서는 도심도로를 대상으로 LDM을 구축하는 방법을 기존 고속도로 LDM을 기준으로 도심도로에 필요한 정보가 추가되는 형태로 검토하여 제시하였으며, LDM 정보의 신뢰도를 평가하고 상태를 모니터링 할 수 있는 체계를 제안하고자 하였다. 이때 정보의 평가 및 모니터링 방법은 기존에 이루어진 바 없으며, 기존 연구에서 제시하고 있는 바와 같이 통신환경 또한 매우 중요한 요인이므로 이를 포함하여 평가항목 및 지표, 목표치 등을 제시하고자 하였다.
이와 같은 내용 및 결과은 기존에 제시된 바 없으나 도로 ‧ 교통분야에서 반드시 검토 및 수립해야 하는 분야라 판단되는 새로운 분야에 대한 접근이므로 상대적으로 참고문헌 및 연구동향이 부족하며, 검증 등의 내용이 포함될 수 없는 한계가 있다. 그럼에도 불구하고 자율협력주행 분야에서 도로 ‧ 교통분야가 주도권을 이끌어 가기 위한 핵심 부분이라 판단되며, 이에 실험적으로 본 연구를 제시하였다.
도심도로 자율협력주행을 위한 정보 플랫폼 구성
1. 도심도로 자율협력주행을 위한 LDM 정의
도심도로는 그림과 같이 다양한 자율주행 핸디캡 상황과 구간이 존재한다. 이를 극복하기 위해 LDM을 활용하여 자율협력주행 기술을 구현하고자 하며, 이를 위해 기존 LDM인 Table 2의 내용을 검토하였다. 지금까지 국내 LDM은 ‘자율주행을 위한 LDM 및 V2X 기반 도로시스템 개발’ 과제의 성과물로 도출되어 고속도로 자율주행 지원을 위한 정적/동적 정보 중심으로 진행되어 왔다. 국제 표준을 기반으로 데이터의 종류, 데이터의 동적 정도에 따라 4개의 Layer 개념별 정의된 LDM (Korea Expressway Corporation, 2019)을 검토한 결과는 다음과 같다.
∙ 기존 LDM은 개발 배경 및 이에 따른 특성으로 인해 LDM의 데이터 범위 측면에서 도심도로에 적합하지 못함
∙ 이에 따라 본 과제에서는 정적/동적 정보 중 도심도로에 필요한 데이터를 정의하고, 해당 데이터에 대한 데이터 개념 정립 및 데이터 프레임/요소에 대한 정의가 필요함
∙ 특히, 도심도로를 자율주행차량이 보다 안전하게 주행하기 위해 필요한 교차로 관련 정보(신호, 이동체 등) 및 도로주행 중 필요로 하는 정보(주정차 차량 정보, 대기행렬 길이 정보 등)을 수집/가공/제공 하는 기술이 포함되어야 함
이와 같은 검토 결과를 바탕으로 전문가 조사를 통해 도출한 Figure 9와 같은 상황극복을 위해 필요한 데이터는 다음과 같다.
∙ 차로별 소통정보: 차량과 인프라 센싱 데이터 기반 차로별 교통소통정보 추정 및 예측정보 생성/제공
∙ 위험/돌발정보: 정적/동적 정보를 통합하여 빅데이터 분석 기반의 위험/돌발 정보를 자동 생성하여 차량 및 인프라 센싱으로 감지하지 못한 위험/돌발정보를 생성하여 제공
∙ 교차로 신호(현시)정보: 자율주행차가 교차로 통과 시 딜레마존을 경험하지 않도록 사전에 하류부 교차로의 신호현시 정보를 제공
∙ 교차로 이동체 정보: 자율주행차가 도심도로 주행 중 경험할 수 있는 가장 위험한 상황인 보행자, 자전거, 이륜차가 센서의 음영지역에서 급작스럽게 나타나는 경우를 최소화하기 위하여 자율주행차가 특히 어려움을 겪을 수 있는 교차로 주변의 이동물체에 대한 전수 인프라 센싱 및 트레킹하여 정보를 제공
∙ 회전차로 대기행렬 길이 정보: 회전차로의 교통량 증가로 인해 전용차로 또는 포켓에 over-flow가 발생할 경우 대기행렬의 끝에 자율주행차량이 접근할 수 있도록 인프라 센싱을 통해 대기행렬 길이 정보 제공. 해당 정보가 없을 경우 대기행렬 중앙부로 끼어들기를 해야 하거나 먼거리에서 우회하여 진행해야 하는 상황 발생 가능
∙ 주정차 차량(위치) 정보: 자율주행차량의 주행 차로 판단에 활용할 수 있는 도로의 미드블럭 구간에 위치한 주정차 차량의 위치정보를 인프라 센싱을 통해 수집하여 제공(단순 주정차 차량으로 인해 도로 일부/전체가 주행 불가시, 해당차량 뒤에서 대기 할지 또는 차로변경을 통해 추월할지 판단하는데 활용)
이를 통해 도심도로 자율주행차 주행 중 가장 어려움을 겪을 수 있는 ‘교차로 통과’를 LDM을 통해 ‘안전’하게 주행할 수 있는 자율협력주행차의 ‘합리적 의사결정’에 활용하기 위한 정보를 제공하고자 하였다.

이를 고려하여 도심도로의 자율협력주행을 위해 Table 3의 Bold 및 Italic 표기한 재설정한 LDM을 구성하였다. 도심도로에 필요한 정보의 갱신주기를 기준으로 Layer를 설정하였으며, 따라서 차선단위의 소통상태 정보는 Layer 3으로 설정하였다. 특히 교차로 신호 등화 및 사각지대의 이동체 정보 등 차량센서로는 정보 수집이 어려우나 차량 주행 시 사고 발생 위험이 매우 높은 상황과 관련된 정보는 Layer 4로 실시간 정보 수집 및 제공이 이루어지도록 설정하였다.
Table 3. Definition of LDM layer for urban road
2. 도심도로 자율협력주행을 위한 LDM 플랫폼 구성
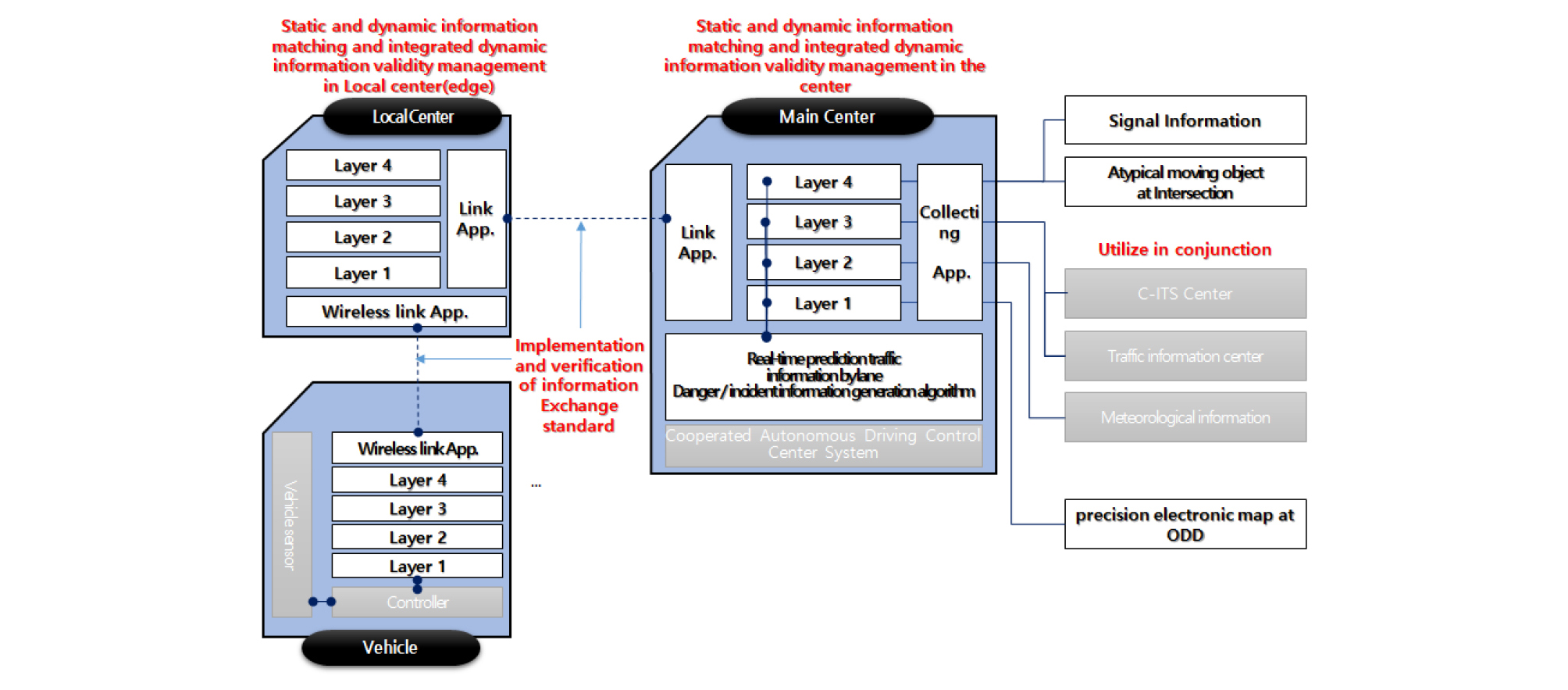
도심도로 자율협력주행을 위해 Figure 7과 같이 센터, 노변장치(RSU, 엣지 또는 지역센터), 차량에 각각 센터 LDM, RSU LDM, 차량 LDM이 있어야 한다. 센터 LDM이 모든 영역의 정보를 모두 담고 있으며, RSU LDM은 해당 RSU가 담당하는 영역의 정보를, 차량 LDM은 개별 차량별로 안전한 주행을 위해 필요로 하는 영역 내의 정보로 구성한다. 동일한 영역은 동일 시각 기준 모든 LDM이 동일해야 하며, 이는 사전에 설정된 갱신주기에 따라 정보를 유통하여 갱신하게 된다.
센터 LDM은 기존 교통정보센터 및 C-ITS센터 등과 연계하여 공유할 수 있는 정보를 주고받아 정보를 최신화 하며, 기상상황은 기상청을 통해 정보를 갱신한다. 신호현시정보는 신호제어기로부터 직접 정보를 전송받아 교차로별/방향별로 다음 현시의 녹색시간 정보를 수집하여 차량에게 전달된다. 교차로의 사각지대에 위치한 정보를 수집하기 위해 교차로에 별도의 이동체 검지장치를 설치하여 차량, 보행자, 이륜차의 위치를 수집하여 센터 LDM의 Layer 4에 정보를 반영한다.
차량에 전달되는 직접 및 연계수집한 데이터 이외에도 센터에서는 별도의 알고리즘을 이용하여 차량 주행에 영향을 미칠 수 있는 위험상황과 돌발상황을 예측 생성하며, 차로별 교통정보를 생성하여 원활한 주행을 위한 차로선택에 도움을 줄 수 있도록 한다. 알고리즘으로 생성된 정보 또한 Layer 4정보로 LDM에 포함되어 차량으로 전달된다.
정보별로 개별 IoT 장치를 관리하고 정보를 전송할 경우 모두 별도의 플랫폼을 갖추거나 해당 장치별 데이터 변환을 위한 체계가 필요하다. 이에 따라 정보의 갱신속도가 서로 다를 수 있는 반면, Figure 10과 같은 단일화된 LDM 플랫폼을 이용할 경우 모든 정보를 단일화된 플랫폼으로 서로 주고받을 수 있으므로 개별 정보를 수집하기 위한 장치가 불필요하다는 강점이 있다. 모두 동일한 전송 표준으로 적용하여 정보를 전송하므로 동일한 플랫폼을 장작한 차량은 전국 어디서나 정보를 송수신할 수 있다는 강점 또한 있다.
정보 플랫폼 평가 방안
1. 적용 가능한 평가 기법
LDM 정보는 도로정밀지도(Layer 1) 기반으로 맵매칭을 통해 자율협력주행차량의 운행 및 제어에 활용된다. 따라서 실제 지도는 없으나, 지도위에 정보를 형상화 할 수 있으며 이에 따라 LDM을 시각화(Data Visualization) 및 시각화 분석(Visualization Analysis)을 통해 평가가 가능하다. 시각화는 데이터 분석 결과를 쉽게 이해할 수 있도록 이미지의 형태로 정보를 변환하는 것을 의미하며, 시각화 분석은 데이터 모니터링 및 평가에 강점을 갖는 분석 방법으로 시각화 된 데이터를 Table 4와 같은 방법을 통해 분석하는 것을 뜻한다.
Table 4. Information visualization method
Table 4의 시각화 분석방법 중 LDM에 적용 가능한 방법은 음영으로 표기된 시간 시각화, 분포 시각화 및 공간 시각화 등이 있다. 시간의 변화에 따라 데이터의 변화를 시각화 할 수 있으며, 누적연속그래프 등으로 정확도 및 신뢰도 등을 표출할 수 있다. 지도 정보를 활용한다는 측면에서 공간 시각화를 통해 LDM을 통해 제공되는 이동객체의 위치 정보를 시각화할 수 있다. 이를 적용하기 위해 도심도로 자율협력주행을 위한 동적정보 플랫폼의 평가항목 및 지표를 도출하였다.
2. 평가항목 및 지표 도출
LDM을 통해 자율협력주행이 이루어졌는지 평가하기 위해서는 크게 평가와 모니터링체계가 필요하다. 이를 Figure 11과 같이 구성하였다. 파란색으로 표기된 부분은 ‘정확히 수집되고 있는가?’, ‘지연 없이 전달되었는가?’, ‘전달받은 데이터는 손실없이 전달되었는가?’를 기준으로 평가되어야 하는 부분이다. 노란색으로 표리된 부분은 ‘장치가 정상적으로 작동되고 있는가?’를 기준으로 센터, RSU, 차량 및 수집장치를 대상으로 모니터링이 이루어져야 한다.
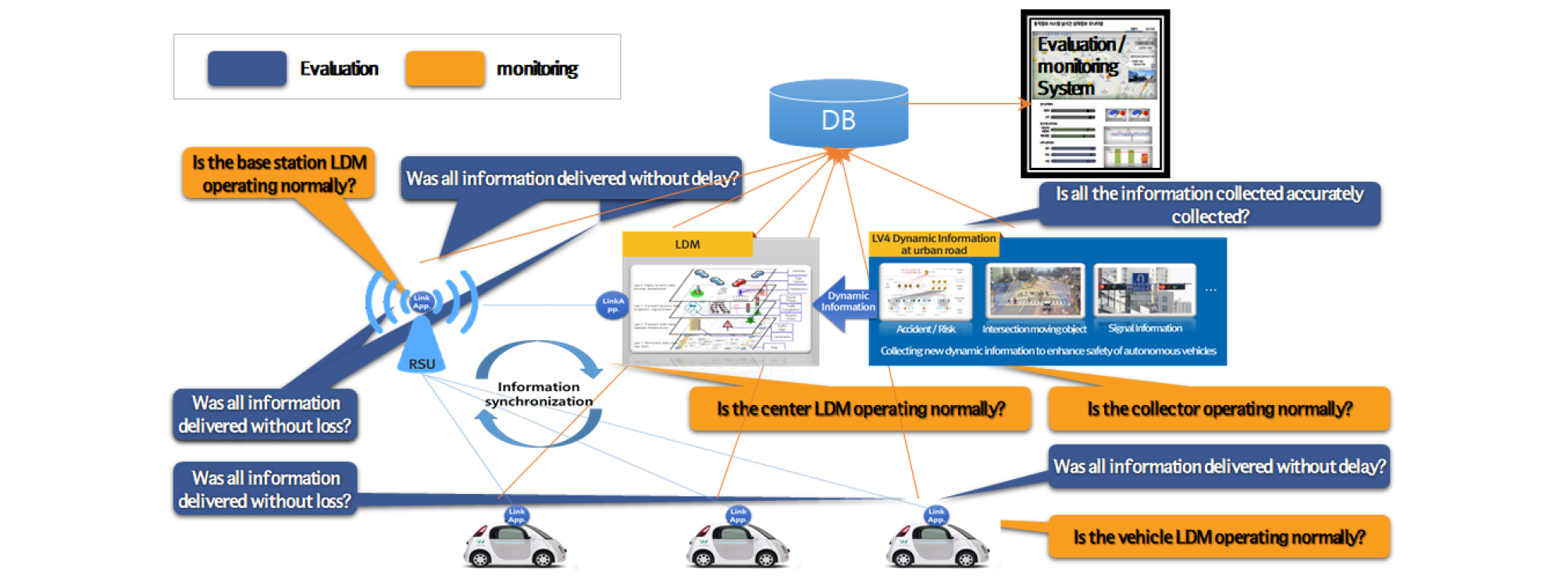
평가는 다시 ‘수집정보의 정확도(직접 수집 및 1차 가공 정보)’, ‘예측정보 생성 정확도(2차 가공 정보)’, ‘데이터 처리의 신속/정확도’를 대상으로 평가한다. 여기서 수집정보의 정확도 평가는 이동체(차량, 이륜차, 보행자), 신호현시정보를 대상으로 평가가 이루어지며, Table 5에 제시된 바와 같이 평가척도 및 평가방법, 목표치를 도출하였다. 도심도로의 자율협력주행을 위해 생성하는 차로단위 교통정보 및 위험/돌발정보를 대상으로는 정확도(오차율) 및 효율성을 평가한다. LDM의 경우 데이터 손실률 및 데이터 처리시간을 기준으로 자율협력주행에 필요한 데이터가 적절한 시각에 모두 전달이 되었는지를 기준으로 평가한다.
Table 5. LDM evaluation items and MOE
3. 평가체계 방법으로의 대쉬보드 구성
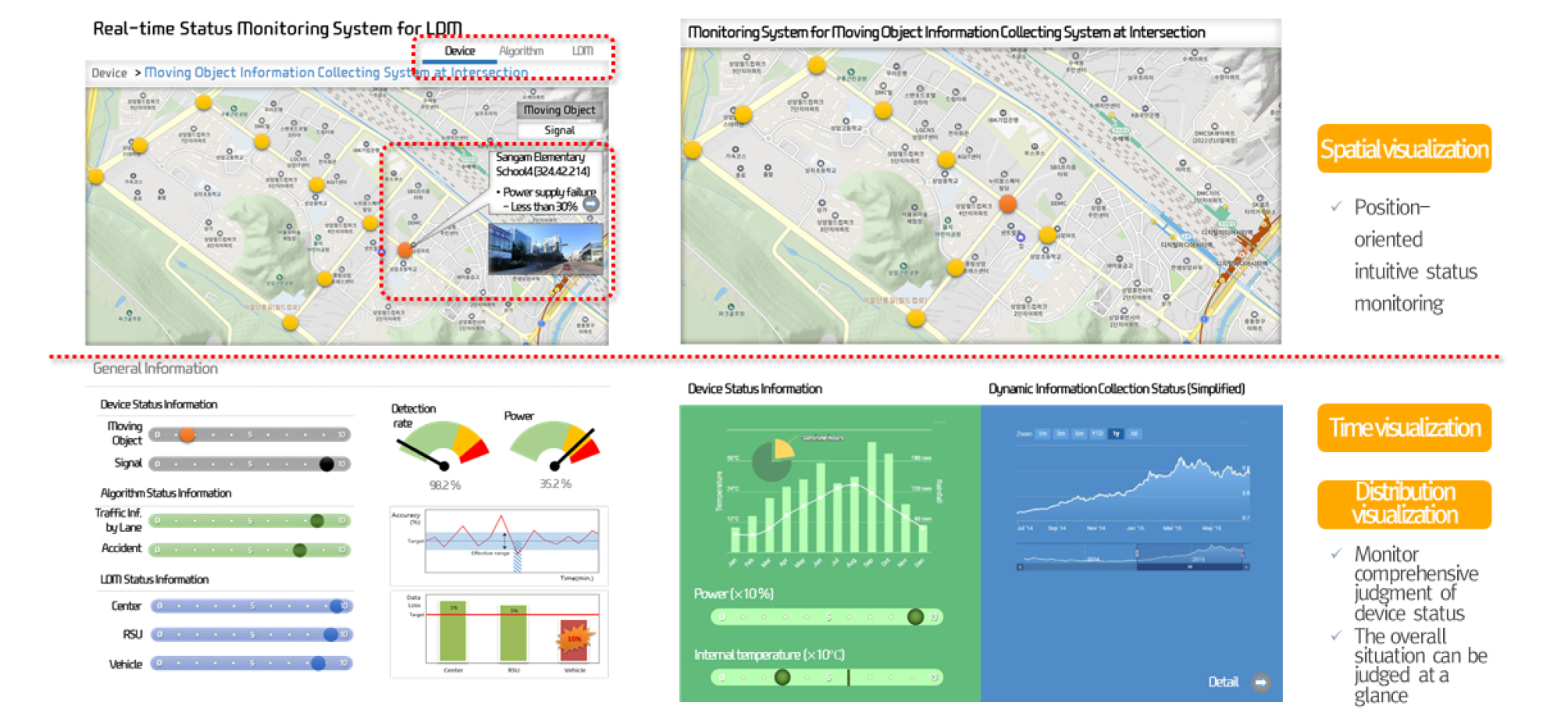
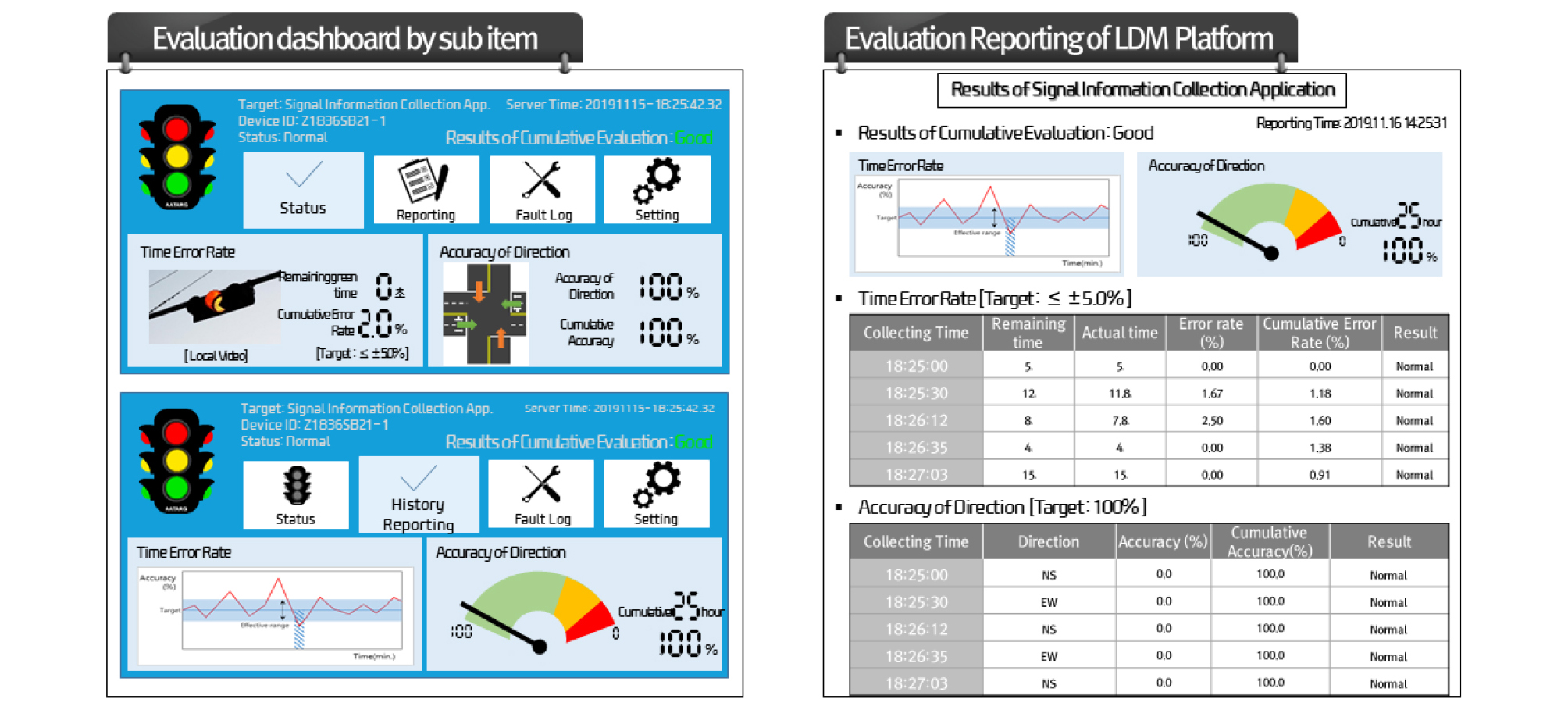
Table 5를 기반으로 구성한 평가시스템 구성안은 Figure 12 및 Figure 13과 같다. Figure 12는 효과적인 평가 및 모니터링을 위한 대쉬보드 구성 결과이다. 공간, 시각 및 분포 시각화 방법을 적용하였으며, 상단에는 공간 시각화 분석 결과 중심으로 배치하였다. 하단에는 장치의 상태정보 및 평가 결과를 MOE에 따라 그래프의 형태로 한눈에 평가결과를 조회 및 상태 모니터링을 할 수 있도록 구성하였다.
결론 및 향후연구
도심도로의 자율주행은 고속도로와는 달리 핸디캡 구간 및 상황이 다수 존재한다. 이와 같은 구간 및 상황을 극복하지 못한다면 도심도로를 대상으로 한 자율주행은 불가능하다고 판단된다. 불확실성이 제거되지 않은 자율주행기술은 이용자의 선택에서 외면될 것이며, 이에 따라 관련 기술의 발전 및 산업 또한 저해될 것이다. 이를 극복하기 위해 최근 적용하고 있는 기술이 LDM을 활용한 자율협력주행이다. 그러나 현재까지의 LDM은 고속도로와 같은 연속류를 대상으로 구성되어 있으며 도심도로 구간에 대해서는 구성 및 적용한 바 없었다.
본 연구에서는 도심도로에서도 자율협력주행을 구현하기 위해 도심도로에 적합한 LDM 정보를 정의하였다. 특히 신호 현시 정보와 사각지대 극복을 위한 교차로 이동체(차량, 이륜차, 보행자)정보를 포함하였으며, 시스템적 구성방안을 제시하였다. 도심도로 자율협력주행을 위한 정보 플랫폼에 대한 시각화 분석을 활용한 평가체계를 구성하였다. 이를 통해 ISO 및 KS 표준으로 정의된 LDM을 이용한 본 과제에서 제안한 LDM 플랫폼을 적용한 자율주행차량은 제조사에 관계없이 완벽한 자율협력주행이 가능할 것이다. 또한 정보의 정확도 및 신뢰도 확보를 위한 실시간 평가 및 모니터링 체계를 포함하여 제시하였다.
현재 도심도로 뿐만 아니라 고속도로를 대상으로 실시간으로 정보를 수집하여 LDM을 구성하고 이를 평가를 시행한 사례는 없다. 이에 본 연구에서 제시한 플랫폼 및 평가체계가 적절한가에 대한 검증은 현 상황에서는 불가능하다. 이에 따라 LDM 구현이 우선 시행되어야 하며, 이후 적절한 평가가 이루어져야 할 것이다. 이를 통해 보다 안전한 자율주행 기술 구현 및 미래 모빌리티 체계 수립이 가능할 것으로 판단된다.
