

서론
도시부 도로는 비효율적인 신호제어로 인해 불필요한 지체가 빈번히 발생한다. 이를 해결하기 위해서는 실제 운전자들이 경험하는 지체를 파악하는 것이 선행되어야 한다. 지체시간을 실측 조사 하는 것이 가장 정확하지만 이는 한계가 있으므로 현실적인 교통상황을 반영하기 위해 다양한 지체 산정 모형들이 개발되었다. 수직적(vertical) 대기행렬 지체 모형은 실질적인 대기행렬을 반영하지 못하여 이러한 한계를 보완한 확률적 지체 모형이 개발되었으며 충격파 이론을 기반으로 하여 과포화를 반영할 수 있는 모형들이 구축되었다. 그러나 실제 신호교차로에서는 해당 방향의 과포화 뿐 아니라 회전 교통류의 과포화에 의해서도 영향을 받는다. 하지만 현재까지 이루어진 연구에서는 대부분 한 방향의 포화도 비를 고려하여 지체를 산정하였고 방향별이동류 간 영향을 반영한 모형은 많지 않다. 본 연구의 목적은 과포화 시 직진 교통류와 좌회전 교통류 간 영향을 고려할 수 있는 신호교차로 지체 모형을 개발하는 것이다. 과포화를 반영하기 위해 충격파 모형인 Kinematic Wave 모형을 기반으로 하였고 좌회전 이동류를 반영하기 위해 FIFO, Non-FIFO 두 가지 분류 규칙을 사용하였다. 본 연구의 모형 설계 범위는 독립 교차로이며 차량이 일정한 차두간격으로 도착한다고 가정하였다.
선행연구 검토
Webster(1958)는 포아송 분포의 도착율과 균일 분포의 출발 차두시간을 가정하여 차량 도착의 임의성을 반영한 확률적 지체 모형을 개발하였다. 하지만 이는 도착 교통량이 포화 상태에 도달하면 지체가 무한대로 과대추정 된다는 한계점이 있다.
이러한 확률적 지체 모형의 한계를 보완하여 Akcelik(1988), Fambro and Rouphail(1997)은 다양한 수요 상황에서의 지체 산정 모형을 경험적 방법으로 도출하였다. 이는 차량이 교차로에 정확하게 일정한 차두간격으로 도착한다고 가정할 때 차량 당 평균 지체와 임의도착에 의한 지체, 과포화와 초기 대기행렬로 인한 지체를 고려하였다. 그러나 경험적 지체 모형은 회전 교통류와 직진 교통류 간 영향을 반영하지 못했다.
Dion et al.(2004)은 충격파 모형을 기반으로 현실적인 수평적(horizontal) 대기행렬을 반영하여 과포화도 수용 가능한 지체 모형을 제시하였다. 이는 신호교차로에서의 지체를 교통 신호가 운영되는 상황에서의 총 통행시간에서 동일한 조건에서 교통 신호가 운영되지 않을 때의 총 통행시간을 제외한 값으로 정의하였다.
Kim et al.(2010)은 충격파 이론을 적용하여 버스와 승용차로 이루어진 비포화 혼합교통류 상황에서 신호교차로와 버스 정류장 사이에 발생하는 지체를 산정하는 모형을 제시하였다. Han and Kim(2012)은 충격파 모형인 Cell Transmission 모형을 사용하여 지체시간과 연동성을 고려한 신호교차로 시뮬레이션 모형을 구축하였다. 그러나 충격파 모형을 기반으로 하여 직진과 좌회전이 분리되는 상황을 반영한 연구는 미흡하다. 본 연구에서는 과포화도 고려하며 직진과 좌회전 이동류 간의 영향을 반영할 수 있는 지체 산정 모형을 개발하고자 충격파 이론을 사용하였다.
충격파 이론의 연구 중 Lighthill and Whitham(1955), Richards(1956)는 교통류의 흐름과 유체가 동일하다는 가정에서 유체역학 이론을 도입하여 LWR 모형을 구축하였다. 이는 진출입구 없는 단일 통로를 지나가는 유체에 대한 밀도의 진화과정을 단순연속방정식을 이용해 묘사하는 수리적인 모형으로 연속 교통류에 대한 비교적 정확한 현실 상황을 수용할 수 있다.
Newell(1993)은 LWR 모형을 기반으로 하여 하나의 링크를 유체모형으로 보고 차분방정식을 사용하여 Kinematic Wave 모형을 만들었지만 이는 복잡한 도로망 및 동적인 교통류를 해석하는 데 한계가 있었다. Daganzo(1994)는 이를 보완하기 위해 유한차분법을 사용하여 미분방정식을 근사적으로 풀어낸 Kinematic Wave 모형을 구축하였다.
본 연구에서는 충격파 전이를 통해 과포화를 표현하기 위해 Daganzo(1994)의 Kinematic Wave 모형을 기반으로 하였다. 확률적 지체 모형의 한계를 보완하기 위해 경험적 방법이나 충격파 이론을 사용하여 과포화 상태를 반영하는 지체 모형에 대한 연구는 기존에도 활발히 수행되었으나 이는 대부분 한 방향의 교통류만 고려하여 지체를 산정하였다. 하지만 실제로는 다른 방향의 과포화 교통류도 지체에 영향을 미친다. 본 연구는 직진과 좌회전이 분리되는 상황에서 과포화 상태를 반영할 수 있다는 점에서 기존 연구와 차별성을 가진다. 직진과 좌회전 분리 상황은 FIFO와 Non-FIFO 두 가지 경우로 나누어 FIFO는 Daganzo(1995)의 분류모형, Non-FIFO는 Lebacque(1996)의 분류모형을 사용하여 연속류에서의 분류 모형을 단속류에 적용하였다. 따라서 본 연구에서는 Kinematic Wave 모형을 기반으로 하여 과포화 상태를 고려하고 직진과 좌회전 교통류 간 영향을 반영한 지체 산정 모형을 개발하였다.
모형 개발
본 연구의 모형에서는 충격파 모형을 적용하여 각 셀의 밀도를 통해 지체시간을 산정하였다. Lighthill and Whitham(1955), Richards(1956)의 LWR 모형에 따르면 유체가 진출입이 없는 통로를 지나갈 때 유체의 교통량과 밀도는 보존된다. 이를 시간, 지점에서 유체의 밀도 와 교통량 으로 표현하면 Equation 1과 같다. Equation 1은 가 에 대한 연속함수일 때 성립한다. 이는 밀도와 교통량이 인 지점과 인 지점에 대하여 Equation 2로 표현할 수도 있다.
Equation 1, Equation 2를 시공간적 셀 단위로 표현하면 모든 셀에 고유한 밀도와 교통량을 정의할 수 있다. Kinematic Wave 모형(Daganzo, 1994)에 의해 공간 셀을 i 단위로, 시간 셀을 j 단위로 분할하는 경우 Figure 1과 같이 밀도가 전파됨에 따라 교통량이 전이된다.
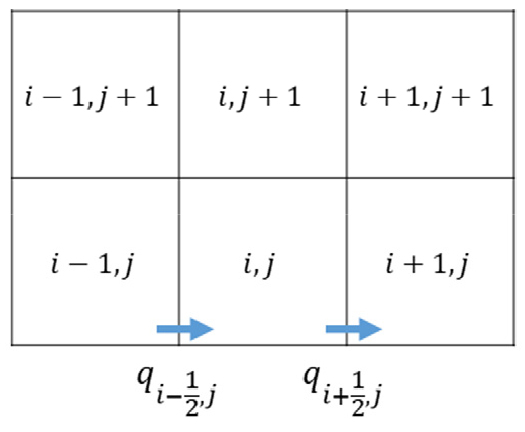
Figure 1에서 공간 i, 시간 j+1 셀의 밀도 는 공간 i, 시간 j에서의 밀도 와 셀 경계의 교통량을 이용하여 Equation 3과 같이 도출할 수 있다.
where, : Time unit of one cell(sec)
: Distance unit of one cell(m)
여기서 셀 경계의 교통량은 Equation 4와 같이 다음 셀로 진입하려는 수요 교통량 과 다음 셀의 교통 상황에서 받아들일 수 있는 공급교통량 에 의해 결정된다.
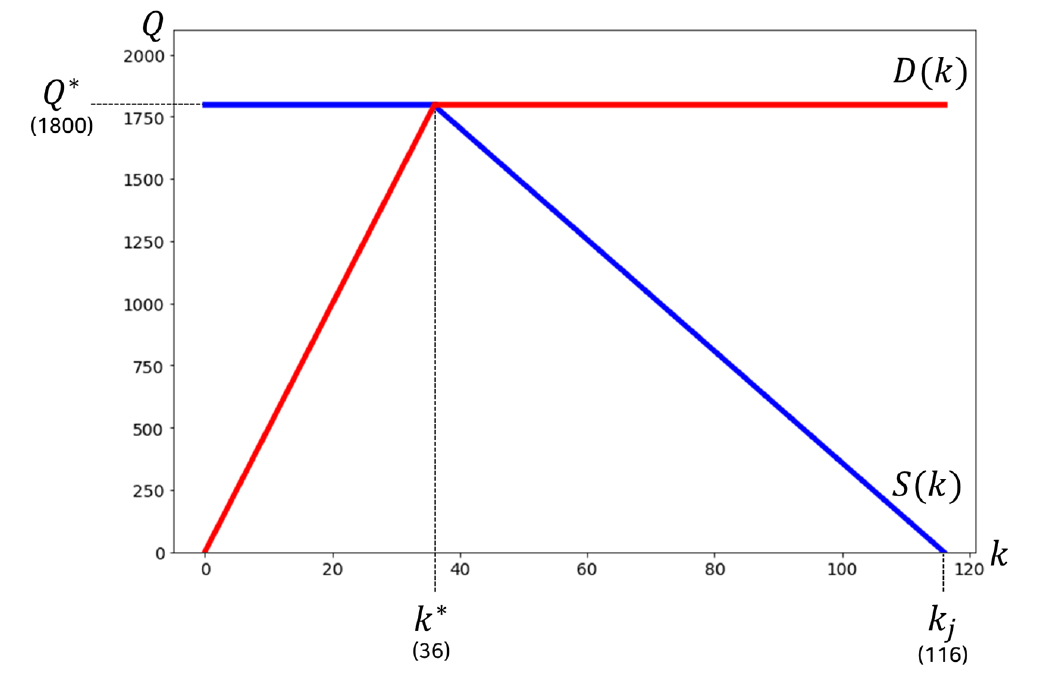
셀 경계의 전이 교통량을 결정하는 수요교통량과 공급교통량은 각 셀마다 부여되는데 이는 셀의 밀도에 따라 결정된다. 본 연구에서는 Figure 2와 같이 밀도 와 교통량 를 선형으로 가정하였다.
where, : Critical density
: Capacity
: Supply function
: Demand function
Figure 2에 의해 밀도가 임계밀도보다 작은 경우 공급할 수 있는 교통량은 용량과 동일하며 수요교통량도 수요만큼 증가할 수 있다. 반면 밀도가 임계밀도보다 큰 경우는 도로가 혼잡한 상황으로 수요는 점점 증가하지만 실제로 도로 용량의 한계로 수요 교통량은 용량과 동일할 것이다. 이를 표현한 식이 Equation 5이다.
본 연구에서는 직진과 좌회전이 분리되는 상황을 반영하기 위해 Kinematic Wave 모형 중 직진과 좌회전을 고려한 Multicommodity 모형을 사용하였다. 과포화 상태에서는 First In First Out(FIFO)인지 Non-First In First Out(Non-FIFO)인지에 따라 교통류 상황이 차이를 보인다.
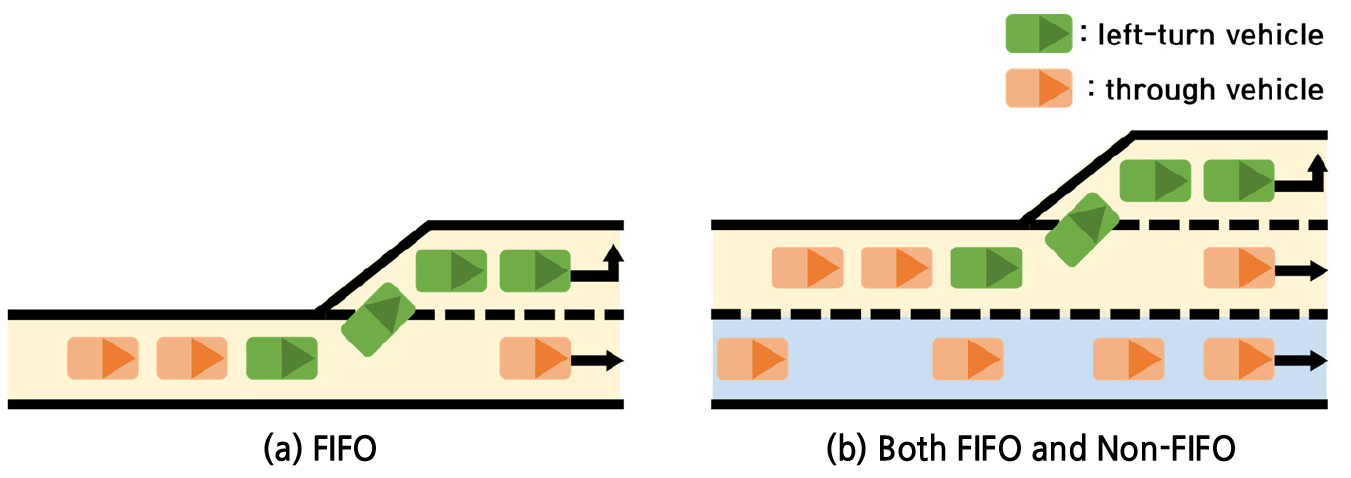
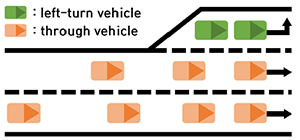
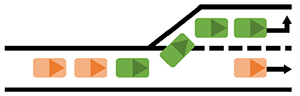
FIFO는 좌회전이나 직진 중 한 쪽이 막히면 상류 교통류 전체가 마비되는 경우이다. 대표적으로 도로 기하구조가 Figure 3(a)와 같이 좌회전 베이가 존재하는 1차로 상황에서 좌회전 대기행렬이 좌회전 베이 용량을 초과하는 경우 발생할 수 있다. 이때는 직진 이동류가 적은 상황이어도 좌회전 차량이 직좌 공용차로를 막으면 직진 차량은 통과할 수 없다.
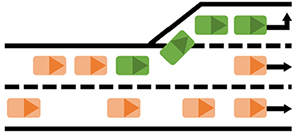
Non-FIFO는 좌회전이나 직진 중 한 쪽이 막히는 것과 관계없이 이동하는 경우이다. Figure 3(b)는 좌회전 베이가 존재하는 2차로로, 이 때 노란색으로 표시된 좌회전 베이와 직진 한 차로는 Figure 3(a)와 동일한 FIFO이다. 하지만 파란색으로 표시된 차로는 좌회전 대기행렬과 무관하게 직진 차량이 통과할 수 있는 Non-FIFO이다. Figure 3 (a)보다 (b) 경우 전체 교통류가 좌회전 대기행렬의 영향을 덜 받는다.
좌회전 대기행렬이 좌회전 베이 용량을 초과하는 상황은 좌회전 베이 길이, 방향별 교통량, 신호변수 등 여러 요인에 의해 발생하므로 본 연구의 모형에서 이러한 변수를 입력 데이터로 하여 FIFO와 Non-FIFO에 영향을 주는 변수를 반영하였다. 좌회전 이동류가 분리되는 셀에서 차로 형태에 따라 전이 교통량 산출 방법을 다르게 적용하였다.
FIFO일 때는 Daganzo(1995)의 좌회전 분류 방법을 사용하였다. 좌회전 이동류가 분리되는 셀의 교통량은 직진, 좌회전 비율 , 에 따라 받아들일 수 있는 직진 교통량과 좌회전 교통량의 합을 통해 결정된다.
where, : Flow of divergent cell
: Upstream demand
: Through supply volume
: Left-turn supply volume
좌회전 교통류가 분리되기 직전의 셀 교통량이 결정되면 이 교통량에 각각 직진, 좌회전 비율을 곱하여 좌회전 이동류가 회전하고 난 직후의 직진 교통량과 좌회전 교통량 , 을 도출할 수 있다.
Non-FIFO의 경우에는 Lebacque(1996)의 좌회전 분류 모형을 사용하였는데 이는 FIFO와 달리 좌회전 교통류가 분리되기 직전의 셀로 전이되는 교통량은 상류 수요교통량을 직좌 비율만큼 분리하는 형식으로 결정된다. 먼저 각 방향별 비율을 사용하여 직진과 좌회전의 수요교통량을 도출한다.
where, : Through demand volume
: Left-turn demand volume
Equation 8에서 도출된 방향별 수요교통량과 공급교통량 중 최솟값으로 방향별 교통량을 산출하고 이를 합하여 직진 교통량과 좌회전 교통량이 분리되는 셀의 교통량을 결정한다.
위에 언급한 수치 모형들을 토대로 모형을 개발하였다. 모형 개발의 첫 단계는 입력 데이터를 설정하는 것이다. 입력 데이터는 크게 기하구조 정보와 교통량 정보, 신호 정보로 나눌 수 있고 그 외에 신호주기 반복 횟수가 있다. 각 세부 내용은 Table 1과 같다.
Table 1.
Input data
두 번째 단계에서는 위의 입력 데이터들을 토대로 시공도의 전체 시간 및 공간 셀 개수를 결정한다. 정밀한 업데이트를 위해 한 셀의 시간 단위()=0.1초, 차량 한 대 크기를 기준으로 하여 공간 단위()=5m로 하였다.
세 번째 단계에서는 입력 데이터 중 신호 변수에 따라 각 셀마다 0부터 3까지의 신호 유형을 부여한다. 신호 유형의 의미는 Table 2와 같으며 본 연구는 독립교차로로 범위를 한정했기 때문에 동서남북 방향성을 고려하지 않고 주방향의 직진, 좌회전만 고려하였다.
Table 2.
Type of signal at each cell
| Type of signal | Through phase | Left-turn phase |
| 0 | Green | Green |
| 1 | Green | Red |
| 2 | Red | Green |
| 3 | Red | Red |
네 번째 단계는 진입 교통량과 직진, 좌회전 비율에 따라 초기 시간의 밀도를 산정하는 것이고 다섯 번째 단계에서는 초기 시간의 밀도, 신호시간, 교통량 등을 토대로 Equation 3을 이용해 다음 셀들의 밀도를 결정한다.
위 과정을 통해 산출된 각 셀의 밀도값을 통해 차량들이 경험하는 지체를 산정할 수 있다. Edie(1965)가 공간과 시간 영역에서 일반화한 밀도()의 정의에 따르면 차량들의 총 통행 시간은 밀도와 시공도 면적의 곱과 같다. 모든 차량들이 경험하는 총 지체는 각 셀들의 밀도 중 초기밀도보다 큰 밀도를 합한 값과 같다. 따라서 총 지체()를 수식으로 표현하면 Equation 11과 같다.
방향별 지체 산정을 위해 Figure 4와 같이 차로 형태에 따라 구역을 나누고 구역별 총 지체를 산정한다. 이러한 방법으로 지체를 산정하면 직진과 좌회전의 교통량이나 신호변수에 따라 달라지는 교통상황에서 어느 방향에 의해 지체가 발생하는지 파악할 수 있다. 특히 Figure 4 중 Left-turn bay일 때 과포화 상태에서 직진과 좌회전의 시공도를 통하여 어느 방향이 혼잡이 원인이 되는지 분석할 수 있다.
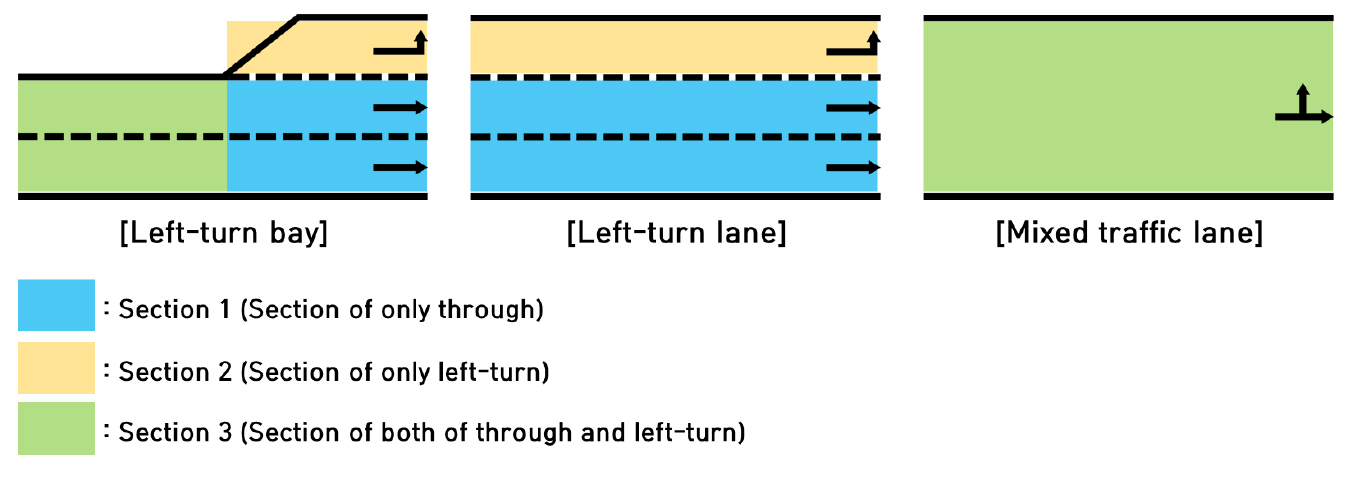
직진 차량만 존재하는 구간(Section 1), 좌회전 차량만 존재하는 구간(Section 2), 혼용 구간(Section 3)으로 구역을 나누어 구역별로 지체를 수집한다. 이를 이용해 방향별 총 지체 , 를 도출한다.
방향별 총 지체를 각각 교통량으로 나눠주면 방향별 평균 지체를 도출할 수 있다. 수요 교통량을 산정하는 방법은 Table 3과 같이 차로 형태에 따라 달라진다.
Table 3.
Method of calculating demand volume
| Structure of lane | Through demand volume | Left-turn demand volume |
| Left-turn bay | ||
| Left-turn lane | ||
| Mixed traffic lane | ||
방향별 총 지체와 통과교통량으로 Equation 14, Equation 15와 같이 방향별 평균 지체 , 를 산정한다.
본 연구의 모형은 충격파 모형을 이용해 교통류의 특성을 표현한다. 시공도의 밀도 값을 토대로 방향별 평균 지체를 분석할 수 있고 좌회전 이동류 분리 상황과 방향별 교통량의 영향을 반영한 시뮬레이션이 가능하다.
모형의 분석 및 검증
본 연구에서 개발한 모형의 차별성을 검증하기 전에 정확성 검증을 위해 직진 이동류만 고려하여 기존 지체모형과 평균지체를 비교분석하였다. 기존 지체모형은 Webster 지체 모형과 HCM 지체 모형을 사용하였다. Webster 임의 지체 모형은 근포화부터 지체가 과대추정되므로 Webster 지체 모형은 균일 지체와 과포화 지체를 합한 지체를 사용하였다. 독립교차로 기준이므로 HCM 지체 모형의 PF는 1로 하고 균일 지체와 증분 지체만 고려하였다. 분석 시나리오는 직진 1차로에 120초 신호주기 중 직진 녹색시간이 45초인 독립교차로로 설정하여 접근 교통량을 변화시켜 15분 동안 분석하였다. Figure 5는 기존 지체 모형과 본 모형의 지체 비교 결과로 본 모형과 Webster 모형의 지체시간은 매우 유사한 값을 가짐을 확인하였다. 근포화 상황을 제외하면 세 모형 모두 유사한 지체값을 갖지만 포화도비가 0.90과 1.10 사이인 경우는 HCM 지체 모형과 지체가 10초 이상의 차이를 보인다. 이는 검증에 사용한 Webster 모형과 본 연구의 모형은 임의 지체를 포함하지 않고 도착 분포를 균일 분포로 가정한 반면 HCM 지체 모형은 임의 지체도 포함하였기 때문이다.
Figure 5를 통해 기본적인 상황에서 본 모형의 정확성을 검증한 후 본 연구 모형의 차별성을 검증하기 위해 과포화 상태일 때 직진 교통류와 좌회전 교통류 간 영향을 분석하였다. 교통류 상태별 3개의 시나리오를 설정하여 본 연구의 모형과 HCM 지체 모형으로 분석한 방향별 평균지체를 미시적 시뮬레이션 프로그램인 VISSIM 결과와 비교하였다. 분석을 위한 세 시나리오의 공통된 가정은 Table 4와 같다.
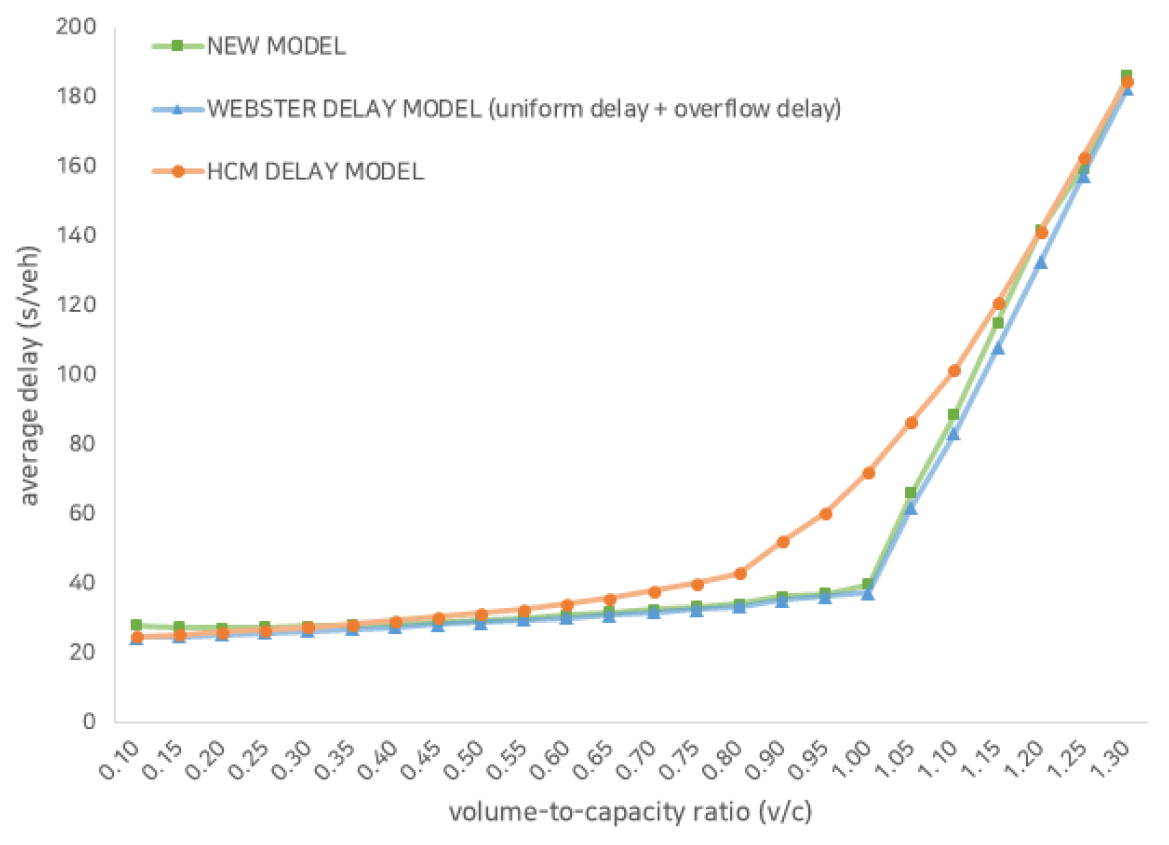
Table 4.
Input data of all scenarios
시나리오 1은 직진, 좌회전 모두 비포화 상황으로 기존 지체 모형도 반영할 수 있는 상황으로 설정하였다. 시나리오 2, 3은 좌회전이 과포화인 상황으로 시나리오 2는 단일차로, 시나리오 3은 다차로로 설정하여 FIFO와 Non-FIFO 상황을 비교하였다. 세 시나리오의 세부 가정은 Table 5와 같다.
Table 5.
Input data of each scenario
본 연구의 모형과 HCM 지체 모형의 평균지체와 미시적 시뮬레이션 프로그램 VISSIM으로 분석한 평균지체를 시나리오별로 비교한 결과는 Table 6과 같으며 Table 7은 본 연구의 모형으로 도출한 시공도이다.
Table 6.
Comparison of delay estimates of VISSIM, HCM delay and the new model for each scenario
Table 7.
Time-space diagrams produced from the new model
| Scenario 1 |
Through Lane 2 |  |  |
|
Through Lane 1 |  | ||
|
Left-turn Lane |  | ||
| Scenario 2 |
Through Lane 1 |  |  |
|
Left-turn Lane |  | ||
| Scenario 3 |
Through Lane 2 |  |  |
|
Through Lane 1 |  | ||
|
Left-turn Lane |  |
시나리오 1은 비포화 상황으로 직진과 좌회전이 서로 큰 영향을 미치지 않아 기존 지체 모형에서도 분석 가능하다. 시나리오 1은 HCM 지체 모형과 본 연구의 모형 모두 VISSIM과 비교 시 90% 이상의 정확도를 보였다. 본 연구의 모형 좌회전 지체가 2.55초 작게 도출된 원인은 임의 지체를 고려하지 않았기 때문이다.
시나리오 2는 단일차로일 때 좌회전 베이 용량을 초과한 과포화 좌회전 교통류에 의해 직진 교통류도 막히는 FIFO 경우이다. HCM 지체 모형은 직진과 좌회전 간 영향을 반영하지 못하고 좌회전 베이 차로 형태를 고려할 수 없다. 또한 본 모형과 VISSIM은 차로 길이를 250m로 설정하여 하류 차로의 지체는 반영하지 않았지만 HCM 지체 모형은 하류 차로의 지체도 포함된다. 따라서 HCM 지체 모형에서 직진은 v/c가 0.62인 비포화 상황으로 간주하여 VISSIM과 -76.46초/대 차이로 32.5%의 낮은 정확도를 보이고 좌회전은 71.01초/대 차이로 76.9%의 정확도를 보였다. 반면 본 연구의 모형은 좌회전 교통류가 직진 차로를 막아 좌회전 대기행렬이 해소될 때까지 직진도 지체가 발생하는 상황을 충격파로 반영하여 VISSIM과 비교 시 직진은 6.03초/대 차이로 94.7%의 정확도를 보였고 좌회전은 26.33초/대 차이로 91.5%의 정확도를 보였다.
시나리오 3은 시나리오 2와 좌회전 v/c가 1.65로 같지만 좌회전 교통류가 좌회전 베이 용량을 초과하여 좌회전 대기행렬이 직진 차로에 쌓여도 직진 차로가 하나 더 존재하므로 직진 1차로는 시나리오 2와 같은 FIFO 상황이 발생하지만 직진 2차로는 좌회전 영향을 받지 않을 것이다. 이를 반영하지 못하는 HCM 지체 모형은 VISSIM과 직진과 좌회전 각각 79.6%, 58.2% 정확도를 보였다. 반면 본 연구의 모형은 방향별 교통류 간 영향을 반영하여 VISSIM과 직진은 1.86초/대 차이로 93.5%의 정확도를 보였고 좌회전은 -14.43초/대 차이로 94.3%의 정확도를 보였다. 이 때, HCM 지체 모형에 비해 본 연구의 모형과 VISSIM의 직진 평균지체가 약 5초 작은 원인은 Table 7 시나리오 3의 직진 1차로 시공도와 같이 직진 1차로의 좌회전 대기행렬이 해소되면서 출발하는 직진 차량이 교차로에 도착하는 시점에 녹색 신호가 켜져 바로 통과되기 때문이다.
결론 및 향후 연구
본 연구에서는 직진과 좌회전 이동류에 대한 과포화를 반영할 수 있는 지체 산정 모형을 개발하였다. 독립교차로를 모형의 설계 범위로 설정하였고 Kinematic Wave 모형을 기반으로 하여 과포화를 반영하고 FIFO와 Non-FIFO의 경우를 나누어 직진과 좌회전 이동류 간 영향을 반영하였다. 모형의 검증을 위해 직진과 좌회전 모두 비포화인 상황, 단일차로에서 좌회전 과포화인 상황, 다차로에서 좌회전 과포화인 상황 총 3개의 시나리오를 설정하여 HCM 지체 모형과 본 연구의 모형을 사용해 도출한 평균지체와 이를 미시적 시뮬레이션 프로그램 VISSIM으로 분석했을 때 방향별 평균지체를 비교분석하였다. 그 결과 본 연구의 지체 산정 모형과 VISSIM의 오차 범위는 1.1-8.5%로 10% 미만으로 본 연구의 모형이 유효성을 가짐을 확인하였다. 이 때 발생하는 오차는 교통량, 속도, 밀도를 기초로 하는 거시적 모형인 본 연구의 모형과 HCM 지체 모형과 달리 미시적 시뮬레이션인 VISSIM은 개별차량 단위로 하여 차량 추종, 차로 변경 등의 모형을 기초로 결과를 도출하기 때문에 발생한다.
본 연구에서 보완할 부분은 향후 연구의 과제로 남긴다. 첫째, 본 연구에서는 차량 도착 분포가 균일 분포라 가정하지만 임의 지체도 고려한다면 더 실질적인 지체시간을 산정할 수 있을 것이다. 두 번째는 연구 범위를 독립교차로에서 축 형으로 넓혀 연동을 반영할 필요가 있다. 이 경우에는 우회전 이동류와 합류 교통량도 고려해야 할 것이다. 또한 이후 네트워크 형태로 범위를 넓힐 경우 각 방향별 녹색신호를 고려할 필요가 있다. 마지막으로는 차로 형태의 범위를 넓히는 것이다. 현재 차로 형태는 좌회전 베이, 좌회전 전용차로, 혼용 차로 3가지로 향후 연구에서는 우회전 차로와 직진 전용차로도 고려할 필요가 있다.
