

서론
선행연구
운전자의 주시행태 분석
1. 분석 데이터
2. 주행환경에 따른 운전자의 주시행태 분석
운전자주시행태를 고려한 차량추종 모형 개발
1. 운전자주시행태 모형
2. Distracted-OFFA (d-OFFA) 모형 개발
3. 교통사고 시뮬레이션
결론
서론
운전자들은 도로 형태, 날씨, 주변 차량의 속도 등의 주행환경에 따라 상이한 운전행태를 보이곤 한다. 이와 더불어 운전자의 특성과 인간-차량 상호작용(human-vehicle interaction)을 폭넓게 이해하고 고려하는 과정은 교통과 관련된 법률을 제정하거나 시스템을 디자인하는 과정에서 필수적인 단계라고 할 수 있으며, 교통운영 혹은 차량제어와 관련된 연구에서도 운전행태를 이해하는 것은 중요한 이슈 중 하나이다. 도로상의 혼잡구간에서 나타나는 가다서다 현상(stop-and-go traffic)이나 교통류의 이력 현상(traffic hysteresis) 등 다양한 주요 교통 현상들의 발생과 진행 과정이 운전자의 운전행태를 통해 설명될 수 있으며, 특히 교통사고와 같은 위험상황은 대부분 운전자의 부주의 또는 과실과 같은 운전행태로 인해 발생한다고 할 수 있다. 미국 도로교통 안전국에서 발표한 내용에 따르면, 사고요인들 중 갑작스러운 기기 오작동, 환경요인 등은 약 6%에 그쳤으며, 이를 제외한 대다수의 경우 사고의 결정적인 원인은 운전자의 과실에서 기인한다고 한다(Singh, 2015). 선행연구에 따르면, 사고요인들 중 약 41%가 운전자의 인지오류에 해당하며, 운전자가 운전에 집중하지 않는 부주의 행동은 주행 중 발생하는 가장 위험한 상황 중 하나라고 할 수 있다(Singh, 2015; Craft and Preslopsky, 2009).
따라서 운전자들로 하여금 사고를 예방할 수 있도록 지원하거나 사고의 심각도를 줄이기 위하여, 자동차 회사들은 차량 추돌 방지시스템(Collision Avoidance System)을 포함한 다양한 사고방지 시스템들을 개발하고 있다. 이러한 새로운 사고방지 시스템은 사고 방어 측면에서 유용할 것으로 예상되나, 실용화를 위해서는 실제 교통 환경에서의 효과 검증이 필수적이다. 그러나 실험을 위한 시공간적 제약과 막대한 비용, 실험상의 안전문제 등의 이유로 실제 도로에서의 실험은 제한적일 수밖에 없어, 이러한 시스템들의 검증은 많은 부분 시뮬레이션에 의존할 수밖에 없다. 문제는 기존의 교통 시뮬레이션 모형들이 교통사고 등의 돌발 상황을 유발하는 운전자의 불완전한(imperfect) 운전행태를 묘사하지 못하며, 추종모형에 추돌방지 제약조건을 내포하고 있는 경우가 많다는 것이다. 때문에 기존 교통시뮬레이션 모형들은 위험상황을 모사할 수 없어, 사고방지 시스템 개발 및 검증용도로는 적합하지 않다고 할 수 있다.
또한 최근에는 자율주행 차량의 등장과 더불어, 자율주행 차량과 일반 차량이 함께 주행하는 혼합 교통류(mixed-traffic) 상황을 대비하기 위한 연구들 활발히 진행되고 있다. 이 경우 운전행태가 다른 이종(異種) 차량 간에 발생하는 잠재적인 위험상황에 대응하기 위한 자율주행 차량의 행태 모형과 사고방지 시스템 개발을 위해서는 다양한 오류를 포함한 인간 운전자(human driver)의 운전행태를 명확히 파악하는 것이 선행되어야 한다. 예를 들어, 도로의 효율을 높이기 위하여 자율주행 차량의 행태 모형을 일반 차량에 비해 상대적으로 공격적으로 디자인 할 경우, 일반 차량 운전자의 예기치 못한 실수는 보다 큰 위험상황을 초래할 수 있다. 하지만 이러한 사회적, 기술적인 수요에도 불구하고 운전행태를 반영하여 위험상황의 시뮬레이션이 가능한 교통 시뮬레이션 모형 개발과 관련된 연구는 현재까지 미흡한 실정이다.
본 연구에서는 이러한 요구에 부응하여, 사고발생이 가능한 위험상황을 재현할 수 있는 차량추종 모형(car-following model)을 제안하고자 한다. 다양한 사고유형들 중에서, 특히 사고발생 빈도가 가장 높은 후미 추돌사고 유형에 주목하였으며, 후행차량 운전자의 전방주시행태를 모델링하여, 차량추종 모형을 개발하였다. 논문의 다음 부분에서는 운전자들의 운전행태에 대한 선행 연구들을 고찰하였으며, 다음으로 실제 주행환경에서 획득된 차량 주행 데이터를 기반으로 운전자들의 주시행태를 분석하고, 이를 바탕으로 주시행태 모형을 개발하였다. 주시행태 모형을 기저 차량추종 모형에 결합하여 시뮬레이션 결과를 도출하였으며, 마지막으로, 본 연구의 결론과 더불어 후속 연구 방향을 제시하였다.
선행연구
여러 차량추종 모형들 중 일부 모형들은 결정론적(deterministic) 접근방법을 취하고 있으나, 이런 방법은 동일한 주행환경에서도 서로 다른 반응을 보이는 운전자 개개인의 운전행태를 모사하기에 적합하지 않으며, 보다 확률론적(probabilistic)인 접근이 필요하다. 이를 위해 많은 연구자들이 기존 차량추종 모형에 무작위의 오차(random noise)를 더해주는 방식을 활용해왔지만, 이 역시 시뮬레이션에서 차량 간의 추돌을 발생시키지 않는 제약조건을 가정하고 있어, 주행 중 운전자로 인해 발생할 수 있는 위험, 돌발 상황을 재현하지 못한다는 한계를 가지고 있다. 최근에는 운전자의 주행 특성 분석을 통해서 보다 실제와 유사한 운전행태를 모사하고, 나아가 사고/준사고 등의 위험상황을 함께 재현하려는 시도들이 이루어지고 있다.
Saifuzzaman and Zheng(2014)은 문헌조사를 통해 차량 주행과 연관이 있는 인적 요인들을 정의하였고, 차량추종 모형에 인적 요인을 결합시키고자 한 선행연구들을 정리하였다. 그들의 논문에 따르면, 다양한 인적 요인 중에서도 운전자의 부주의를 묘사하려는 시도는 가장 최근에서야 이루어지고 있다고 한다.
Yang and Peng(2010)은 충돌-경고 시스템의 도로 운영 실험(road-departure crash-warning system field operational test)을 통해 얻어진 주행 데이터를 분석하여 이상 운전행태를 도출하였고, 이를 운전자 부주의 행태라고 정의하였다. 이 데이터를 기반으로 얻어진 통계적 수치들을 이용하여 운전자의 인지 한계(perceptual limitation), 부주의 등을 고려한 확률적 차량추종 모형을 제시하였다. Przybyla et al.(2015)은 운전자가 주행에 집중하지 않는 동안은 차량의 속도가 일정하게 유지된다는 가정 하에 Newell의 차량추종 모형(Newell, 2002)에 확률론적인 방법으로 운전자 부주의를 결합하여 모형을 확장시켰다. 최근에는 Lindorfer et al.(2018)이 Treiber et al.(2006)이 제시한 인간 운전자 모형(Human Driver Model, HDM)을 기반으로 운전자의 반응시간(reaction time)과 부주의를 결합시켜 향상된 인간 운전자 모형(Enhanced Human Driver Model, EHDM)을 제안하였다. 이 연구에서는 운전자의 경미한 부주의와 주요 부주의를 구분하여 반응시간을 조절하였고, 부주의가 발생하는 동안에는 차량의 가속도가 일정하게 유지되는 형태의 모형을 개발하였다.
이런 선행 연구들은 차량추종 모형에 운전자 행태를 반영하기 위한 시도로서 의미가 있다고 할 수 있지만, 대부분의 연구에서 운전자의 부주의는 체계적인 고찰 없이 무작위의 오차로 가정되어 표현되었다. 실제로 운전행태는 주행환경과 차량의 주행 상태 등 다양한 요인에 의해 영향을 받기 때문에, 사고재현 연구를 위한 기반을 마련하기 위해서는, 운전자의 행태를 보다 심도 있게 분석하고 이해하는 것이 선행되어야 한다.
운전자의 주시행태 분석
본 연구에서는 운전자의 부주의와 관련된 행태 중에서, 특히 전방 미주시행태에 주목하여, 우선적으로 운전자의 주시행태에 영향을 미치는 주행환경 요소들에 대한 분석을 수행하였다. 본 장에서는 주행환경 요소들을 시간적 범위에 따라 크게 (1) 도로환경 변수와 (2) 차량주행 변수로 구분하였으며, 각각 변수들이 주시행태에 미치는 영향을 분석하였다.
1. 분석 데이터
운전자의 주시행태 분석에는 100대 차량 일상주행연구 데이터(100-car naturalistic driving study data)를 활용하였는데, 이 데이터는 차량의 속도, 가속도 등을 포함한 주행 데이터와 운전자의 주시 데이터가 함께 기록되어 있다. 이 데이터는 VTTI1)에서 카메라와 센서를 부착한 100대의 차량을 대상으로 2,000,000마일 이상의 일상주행 데이터를 수집하여 제공하는 것으로, 크게 일상 주행 데이터와 사고 데이터로 구분된다. 일상 주행 데이터는 특별한 위험상황 없이 8km/h 이상의 속도로 주행한 데이터 중 6초의 구간을 임의로 추출한 데이터들로 구성되어 있다. 사고 데이터에는 68건의 사고와 760건의 준사고가 속해 있으며, 이벤트(사고 및 준사고) 시작 시점과 충돌 시각이 기록되어 있고, 사고발생 시점을 기준으로 전 20초와 후 10초의 데이터가 제공된다. 준사고 상황은 주행 차량의 감속도, 선행차량과의 TTC (Time to Collision) 등 VTTI에서 제시한 기준들을 바탕으로 규정되며, 자세한 사항은 Klauer et al.(2006)이 발표한 보고서에서 확인할 수 있다.
100대 차량 일상주행연구 데이터는 차량 외부에 부착된 카메라, 차량 내부 운전자를 촬영한 카메라와 차량 내부 센서를 통해 획득되었으며, 차량 외부에 부착된 카메라를 통해서는 날씨, 도로 형태 등 외부 환경요인들을 파악할 수 있고, 차량 내부 카메라를 통해서는 0.1초 단위로 운전자의 주시행태를 확인할 수 있으며, 차량 내부 센서를 통해 속도, 가속도 등 차량의 움직임과 관련된 사항이 기록된다. 다만 차량 내부 센서 데이터는 사고 데이터에서만 제공되고 있기 때문에, 본 연구에서는 사고 시작 시점 이전에는 운전자의 행동이 일상 주행 상황과 동일하다는 가정 하에 차량 내부 센서 데이터를 사용하였다. 한편, 운전자의 주시행태를 기록한 차량 내부 카메라 데이터에서는 주시 구역을 전면, 왼쪽 측면 거울, 후면거울, 동승자 등 10개 이상의 카테고리로 분류해 두었다. 본 연구에서는 운전자의 전방 미주시에서 비롯된 사고를 모델링하고자 하는 목적에 맞추어 이를 전방 ‘주시’와 ‘미주시’의 두 가지 카테고리로 재분류하였다.
2. 주행환경에 따른 운전자의 주시행태 분석
운전자의 주시행태는 다양한 주행환경에 의해 각기 다르게 영향을 받는다. 날씨나 조광 상태 등이 일정 시간 이상 동일하게 유지되는 환경요인과 매 순간 변하는 차량의 속도, 가속도, 선행차량과의 거리 등은 서로 다른 방식으로 주시행태에 영향을 미친다. 본 장에서는 이러한 다양한 주행환경 요소들을 도로환경 변수와 차량주행 변수의 두 가지 종류로 구분하였으며, 각각의 변수들이 운전자의 주시행태에 미치는 영향을 분석하였다.
도로환경 변수는 도로 형태, 날씨, 주야 등 영향을 미치는 공간적 범위가 넓고, 일정 시간 이상 지속되는 특성을 가지고 있다. 100대 차량 일상주행연구 데이터에서 제공하는 차량 외부 카메라 데이터 중 주행 당시의 도로 표면 상태, 차선, 신호 구배 등 열개 가량의 변수들이 도로환경 변수에 해당된다. 각각의 변수들은 다시 세부 항목들로 분류되는데, 예를 들어 도로 형태의 경우 일반 도로, 교차로, 교차로 부근, 주차장, 합류부 등의 세부 항목을 갖는다. 도로환경 변수는 지속 시간이 긴 만큼 전반적인 주시행태에 영향을 미치며, 이 정도를 파악하기 위하여 각 변수의 세부항목에 해당하는 주행 데이터를 추출한 뒤, 주시행태의 변화를 마르코프 전이행렬(Markov transition matrix) 형태로 모델링하였다. 전이행렬의 기준은 전방주시/미주시 두 시점이었으며, 행렬의 대각선은 각 시점의 주시 지속시간과 연관이 있고 나머지는 주시빈도와 연관이 있다. 전이행렬의 유사도를 기준으로 동일 변수 내의 몇몇 세부항목들은 하나의 항목으로 통합되었고, 세부항목에 따른 전이행렬의 차이가 크지 않은 변수들은 주시행태에 미치는 영향이 크지 않은 것으로 판단하였다. 분석 결과, 주시행태에 영향을 준다고 판단된 도로환경 변수들은 도로 형태, 주야간, 구배 총 3개였으며, 각 변수들의 세부항목과 분석 내용은 Table 1에 제시하였다.
Table 1. Summary of analysis on road environmental variables
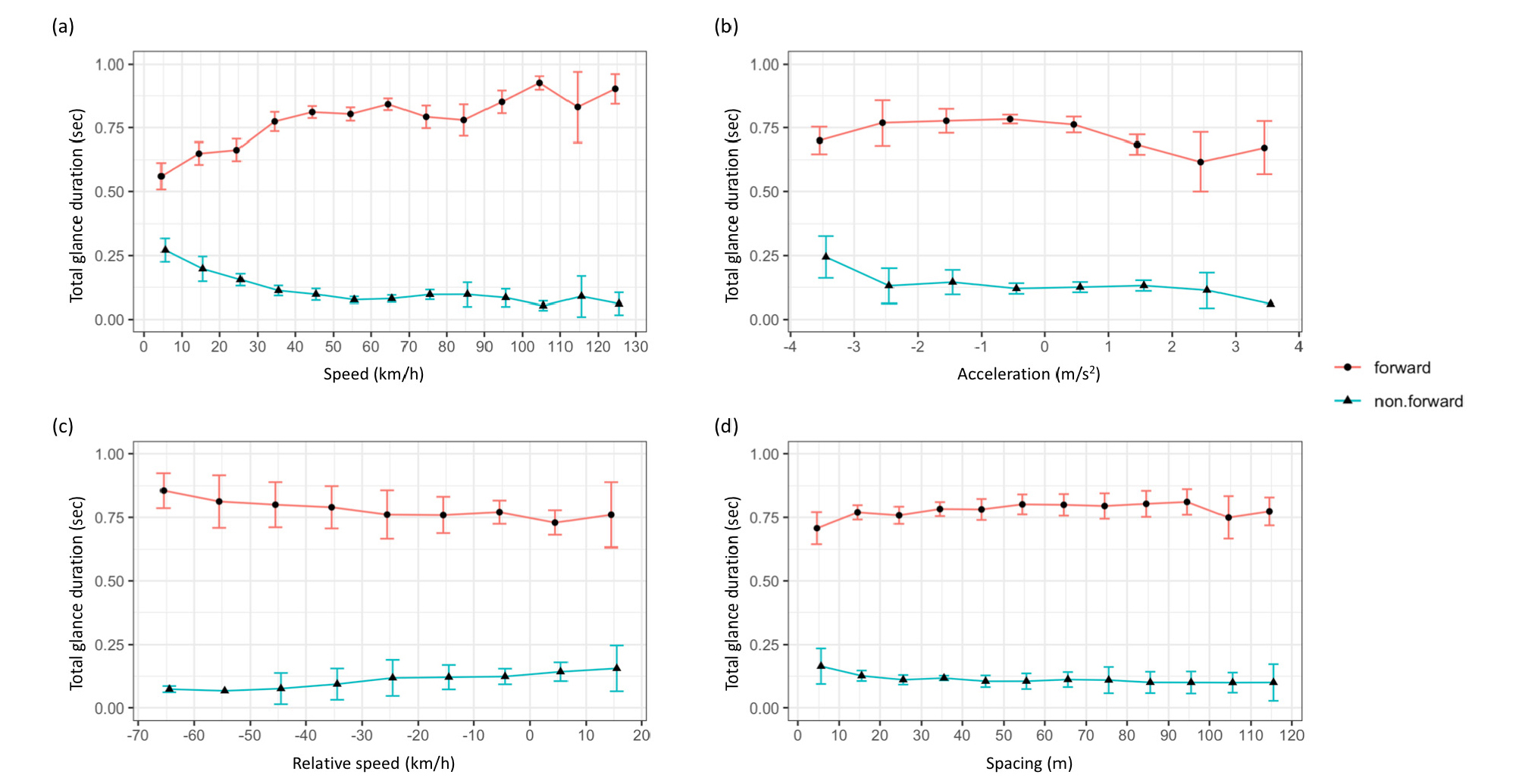
다음으로 주시행태를 보다 자세히 이해하기 위하여 차량주행 변수들이 운전자의 주시행태에 미치는 영향을 분석하였다. 차량주행 변수에는 주행차량의 속도, 가속도, 선행차량과의 거리, 상대속도 등이 있으며, 이들은 100대 차량 일상주행 연구 데이터에서 제공하는 차량 내부 센서데이터들을 기반으로 계산되었다. 앞서 언급하였듯이, 차량 내부 센서데이터는 사고 데이터에서만 제공되고 있으므로, 사고가 발생하기 5초 전까지의 데이터를 정상 주행 상황이라 가정하여 데이터를 분석하였다. 한편, 차량주행 변수는 매 순간 변하기 때문에 도로환경 변수들의 분석에 사용하였던 마르코프 전이행렬의 사용은 적합한 접근이라 볼 수 없다. 차량주행 변수의 특성을 고려하여 본 연구에서는 1초 동안 운전자가 특정 시점을 바라본 시간을 총 주시 지속시간(total glance duration)이라 정의하였고, 변수 값에 따라 총 주시 지속시간의 변화를 분석하였다.
차량의 속도, 가속도, 선행차량과의 상대속도, 차간거리에 따라 주시/미주시상태의 총 주시 지속시간 분포의 변화는 Figure 1에서 확인할 수 있다. 분석 결과에 따르면 차량주행 변수 중 차량의 속도가 총 주시 지속시간에 가장 큰 영향을 미쳤다. 속도가 증가함에 따라 전반적으로 총 전방주시 지속시간은 점차 증가하는 추세를, 총 미주시 지속시간은 감소하는 추세를 보였다. 단, 70-80km/h 이후의 속도에서는 총 주시 지속시간의 변화는 진동에 가까운 형태를 보였으며, 표준편차 역시 상대적으로 높은 값을 보였다. 이는 70km/h 이상의 속도로 주행하는 상황이 일반적으로 혼잡이 없는 자유흐름(free flow) 상태에 해당되고, 이 때 운전자의 주시 자유도가 높아지기 때문인 것으로 판단된다. 가속도의 경우 감속 상황에서는 주시행태에 미치는 영향이 크지 않으나, 가속 상황에서는 총 전방주시 지속시간이 감소하는 것을 확인할 수 있었다. 운전자들이 가속을 하는 경우에는 일반적으로 차간거리가 확보되어 이미 차량의 안전이 어느 정도 보장된 상황이라고 생각할 수 있는데, 이 경우 운전자가 안전함을 느끼기 때문에 상대적으로 전방 미주시 지속시간이 증가하는 것이라고 해석할 수 있다. 차간 상대속도는 주행차량의 속도에서 선행차량의 속도를 뺀 값으로, 양의 값일 경우 주행차량이 선행차량보다 빠른 속도로 주행하는 상황을 의미한다. 분석 결과에 따르면 상대속도가 높아질수록 총 전방주시 지속시간은 감소하고, 미주시 지속시간은 증가하는 추세를 보인다. 이 현상 역시 가속도의 경우에 견주어 생각해 볼 수 있는데, 일반적으로 선행차량보다 빠른 속도로 주행한다는 것은 이미 차간거리가 충분하거나 높은 속도로 주행해도 충분히 안전한 상황임을 의미한다. 이러한 상황에서는 운전자가 주행의 안전함을 느끼고 있기 때문에 전방 미주시 지속시간이 길어질 수 있다. 한편, 선행차량과의 차간거리는 운전자의 주시행태에 큰 영향을 미치지 않는 것으로 나타났다. 차간거리가 0-10m일 경우에만 총 전방주시 지속시간이 낮은 값을 보였는데, 이는 대부분의 차량이 신호 등으로 정차한 상황이기에 운전자의 주시 자유도가 높아지는 것으로 보인다.
운전자주시행태를 고려한 차량추종 모형 개발
본 장에서는 앞서 분석한 내용들을 바탕으로 운전자의 주시행태를 고려한 차량추종 모형에 대하여 서술하고자 한다. 차량추종 모형 개발의 첫 번째 과정으로 주행환경에 따른 운전자의 주시행태를 모델링하였다. 모델링 과정에서 주시행태에 주요하게 영향을 미치는 요소들을 선별하기 위하여 계층적 의사결정 나무 분석을 시행하였으며, 그 결과로 운전자의 주시행태에 따른 주행 시나리오를 도출하였다. 주행 시나리오 별로 각각 다른 주시행태 모형을 개발하였으며, 이를 기저 차량추종 모형에 결합시켜 운전자 주시행태를 고려한 차량추종 모형을 제안하였다.
1. 운전자주시행태 모형
앞선 분석 내용에서도 확인하였듯이 운전자의 주시행태는 다양한 주행환경 요소들에 의해 영향을 받는다. 하지만 운전자의 주시행태를 모델링함에 있어 이 모든 변수들을 고려할 경우 몇 가지 문제점들에 부딪히게 될 수 있다. 지나치게 많은 변수들을 고려할 경우 모형이 지나치게 복잡해질 위험이 있으며, 이는 필연적으로 모형의 실용성을 떨어뜨리는 원인이 된다. 따라서 운전자의 주시행태에 주요한 영향을 미치는 변수들을 선별하여 모형을 단순화하기 위해서 본 연구에서는 의사결정 나무(decision tree) 분석을 시행하였다. 의사결정 나무 분석은 도로환경 변수와 차량주행 변수의 시공간적 범위 차이를 고려하여 계층적으로 구성되었으며, R 패키지 중 하나인 ‘partykit’에 내장되어 있는 Conditional inference Tree (CTree) 함수를 사용하였다(Hothorn and Zeileis, 2015). 이 함수는 프루닝(pruning) 기능을 포함하고 있기 때문에 주시행태에 의미 있는 영향력을 가지지 않은 변수들은 의사결정 나무 생성 과정에서 배제될 수 있다.
계층적 의사결정 나무 생성의 첫 단계에서는 Table 1에 표시된 세 개의 도로환경 변수가 사용되었으며, 가지 분기의 기준이 되는 클래스(class)로는 주시 지속시간(glance duration)이 사용되었다. 생성된 의사결정 나무는 Figure 2에서 확인할 수 있으며, 이 단계에서 총 네 개의 주요 시나리오가 생성되었다. 도로 형태, 주야간 변수가 주시행태에 의미 있는 영향력을 가진 변수로 선별되었으며, 구배 변수는 프루닝 과정에서 영향력이 충분하지 않다고 판단되어 시나리오 생성에 사용되지 않았다. 주시행태에 가장 큰 영향을 미친 변수는 도로 형태로 노드 1, 2에 거쳐 일반도로와 교차로, 기타 형태에 따라 시나리오가 나뉘었다. 일반도로일 경우에는 주야간 조건에 따라 주시행태가 달라졌다.

첫 번째 의사결정 나무에서 생성된 네 가지의 주요 시나리오들은 차량주행 변수에 의해 세부 시나리오로 분류되었다. 속도, 가속도, 선행차량과의 상대속도, 차간거리가 변수로 사용되었고, 총 전방주시 지속시간이 클래스로 사용되었다. 의사결정 나무 생성 결과 선행차량과의 상대속도, 차간거리는 충분한 영향력을 가지지 않는 것으로 판단되었으며, 네 개의 주요 시나리오 각각에서 속도에 의한 세부 시나리오들이 도출되었다. 한편, 시나리오 4에서는 세부 시나리오 생성에 가속도 변수도 포함되었다. 일반도로, 야간, 44.2km/h 이상의 주행 상황에서는 가속도에 의해 주시행태가 영향을 받으며, 0.05m/s2의 가속도 기준으로 보아 가속상황과 감속상황의 주시행태에 차이가 있는 것으로 판단된다.
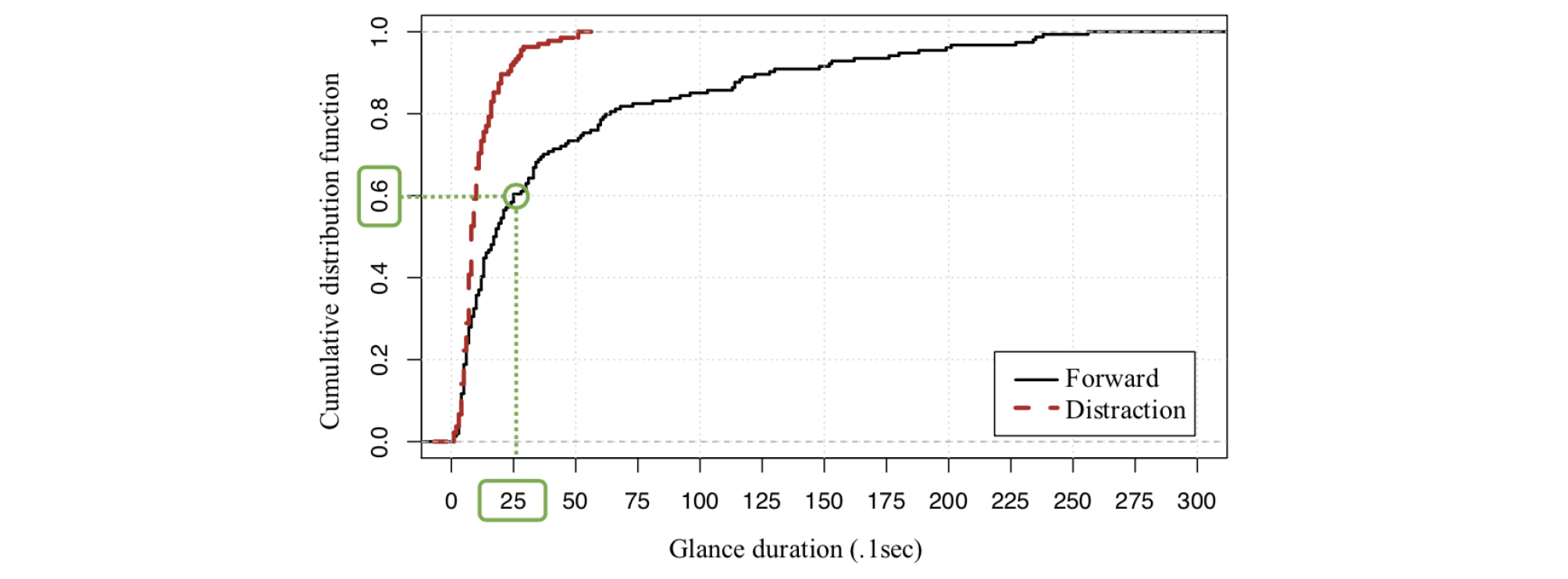
본 연구에서 운전자는 전방주시와 미주시, 두 가지의 주시상태를 갖는다. 주행 시나리오별 주시행태 모형은 운전자의 주시상태가 바뀌는 순간 바뀐 주시상태의 지속시간을 결정한다. 주시행태 모형은 데이터를 기반으로 도출되었으며, 앞서 분석에서 사용하였던 100대 차량 일상주행연구 데이터가 동일하게 사용되었다. 100대 차량 일상주행연구 데이터 중 각 시나리오에 해당하는 데이터를 추출하여 두 가지 주시상태의 주시 지속시간을 누적확률분포의 형태로 나타내면 Figure 3의 그래프와 같은 형태가 된다. Figure 3은 시나리오 3-2에 해당하는 주시지속시간 누적확률분포이며, 이 분포를 통해 주시상태전환이 일어날 때 다음 주시상태의 지속시간을 확률적으로 계산할 수 있다. 예를 들어, 운전자가 전방 미주시상태를 끝내고 전방주시를 시작할 때, 시나리오 3-2 상황에서 주행하는 운전자는 0.6의 확률로 2.5초 간 전방주시상태를 지속한다. 2.5초가 흐른 뒤 해당 차량의 주시상태는 전방 미주시로 전환되며, 이때 미주시상태의 지속시간이 같은 방식으로 계산된다. 그래프의 기울기가 완만할수록 주시 지속시간이 길다는 것을 의미하며, 주로 고속주행 상황에서 전방주시의 경우 기울기가 더 완만하고, 미주시의 경우 기울기가 더 급하게 나타난다.
2. Distracted-OFFA (d-OFFA) 모형 개발
본 절에서는 앞서 개발한 운전자 주시행태 모형을 이용하여 운전자의 전방 미주시로 인한 위험상황을 모델링 할 수 있는 차량추종 모형 개발과 관련된 내용을 기술하였다. 일반적으로 차량추종 모형은 선행 차량의 움직임에 대한 정보를 바탕으로 단위 시간 후 차량의 위치 혹은 속도, 가속도 등의 상태를 추정한다. 본 연구에서는 운전자가 전방 미주시 상태에서는 선행차량 및 도로 위의 갑작스러운 상황 변화를 인지하지 못한다고 가정하였으며, 운전자 주시행태를 차량추종 모형에 반영하기 위하여 운전자가 전방을 주시하고 있을 때는 일반적인 차량추종 모형을 따르고, 전방 미주시 상태에서는 현재 가속도를 유지한다고 가정하였다. 본 연구에서는 과포화 고속도로 교통류 알고리즘(Oversaturated Freeway Flow Algorithm, OFFA; Yeo et al., 2008)의 차량추종 모형을 기저모형으로 사용하였고, 여기에 운전자 주시행태 모형을 결합하여 Distracted-OFFA (d-OFFA)를 개발하였다.
기저모형으로 사용된 OFFA는 차량의 종 ‧ 횡방향 움직임을 묘사하는 통합 미시 교통 시뮬레이션 모형이다. OFFA의 차량추종 모형은 Newell의 차량추종 모형을 기본으로 하여 안전조건을 포함한 다양한 제한조건들이 추가된 것으로, 현재 선행차량의 움직임 정보와 현재 차량 속도, 목표 속도, 기타 차량성능 변수 등을 이용하여 다음 시뮬레이션 단위 시간에서 차량의 위치를 결정한다. 자유흐름 상태와 혼잡 상태에 따라 움직임이 달라지는데, 자유흐름 상태에서는 목표 속도까지 가속을 취하며, 목표 속도에 도달한 뒤에는 속도를 유지한다. 혼잡 상태에서는 선행차량과의 차간거리, 현재속도, 그리고 차간 안전거리에 따라 차량의 위치가 결정된다. OFFA는 또한 차량사이의 간격이 일시적으로 줄어드는 운행상태인 쇼트 갭 모드(short-gap mode)를 추가하여 운전자의 비대칭적 운전행태(asymmetric behavior; Yeo and Skabardonis, 2009)를 반영할 수 있다. 본 연구에서는 쇼트 갭 모드의 임의적 변수 설정을 없애고 계산 속도를 향상시킨 후속 버전의 OFFA 모형을 사용하고 있다(Choi et al., 2017). Choi et al.(2017)이 제시한 후속 버전 OFFA의 종방향 움직임은 Equation 1에서 확인할 수 있다.
| $${\mathrm x}_{\mathrm n}(\mathrm t+\mathrm{Δt})=\max(\mathrm x_{\mathrm n}^{\mathrm U}(\mathrm t+\mathrm{Δt}),\;\mathrm x_{\mathrm n}^{\mathrm L}(\mathrm t+\mathrm{Δt}))$$ | (1) |
여기서, 는 시뮬레이션 단위시간, 는 대상 차량의 위치를 나타내며, 와 는 각각 차량 위치의 상한 값과 하한 값을 나타낸다. 차량 위치의 상한 값은 자유흐름 상태와 혼잡상태에서의 차량 간격과 안전거리를 고려한 차량 위치를 나타내고, 차량 위치의 하한 값은 차량역류(backflow)를 막고, 최소 감속거리를 고려한 제한조건이다. 기저 차량추종 모형에 대한 자세한 내용은 관련 문헌에서 확인할 수 있다(Yeo and Skabardonis, 2008; Choi et al., 2017).
본 논문에서 제시하는 d-OFFA 모형에서는 운전자의 주시상태에 따라 주행 행태가 달라진다. 운전자가 전방을 주시하는 상황에서 d-OFFA 모형은 기저 차량추종 모형인 OFFA와 동일한 행태를 보이며, 운전자의 주시상태가 전방 미주시일 때는 현재 가속도를 유지한다. 두 가지 상태에 따른 차량추종 모형은 Equation 2에 제시되어 있다.
는 주시상태에서의 차량추종 모형을 나타내고, 는 미주시상태에서의 차량추종 모형을 나타내며, 각각은 Equation 3, 4에서 확인할 수 있다. 와 는 각각 현재차량의 속도와 가속도를 나타내며, Equation 3은 기존 OFFA와 동일하고, Equation 4는 차량이 현재 가속도를 유지하도록 모델링되었다.
| $$x_n^f(t+\Delta t)=max(x_n^U(t+\Delta t),\;x_n^L(t+\Delta t))$$ | (3) |
| $$x_n^d(t+\Delta t)=max(x_n(t),\;x_n(t)+v_n(t)\Delta t+a_n(t)\Delta t^2)$$ | (4) |
3. 교통사고 시뮬레이션
본 절에서는 d-OFFA 모형의 목표, 즉 운전자 전방 미주시로 인한 위험상황 재현을 잘 수행할 수 있는지를 평가하였다. 일반적인 후미추돌 사고의 경우, 후행차량이 선행차량의 갑작스러운 감속에 적절하게 대응하지 못하는 경우에 발생한다. 따라서 선행차량이 감속하는 상황에서 d-OFFA 모형을 따라 진행한 후행차량이 어떠한 행태를 보이는지 확인하고자 하였고, 이를 위해 미시 교통 데이터인 NGSIM (Next Generation SIMulation)의 고속도로 차량궤적 데이터를 사용하였다. NGSIM 데이터의 차량추종 쌍 중 1회 이상의 가다서다(stop-and-go) 현상을 보이는 1659개의 차량 쌍을 추출하였고, d-OFFA로 후행차량을 시뮬레이션 하였다.
시뮬레이션 결과, 다양한 현상들을 관찰할 수 있었으며, Figure 4에 대표적인 예시들을 제시하였다. Figure 4의 도표들은 차량추종 쌍에서 추출한 선행차량, 기저 차량추종 모형인 OFFA로 시뮬레이션 한 궤적, d-OFFA로 시뮬레이션 한 궤적을 보여주고 있다. d-OFFA로 시뮬레이션 한 차량은 표시된 것과 같이 전방주시상태(빨간색)와 미주시상태(노란색)를 반복하며 주행한다. 대부분의 경우에서 Figure 4(a)와 같이 후행차량의 미주시 상태는 전체 주행에 큰 영향을 주지 않았다. 후행차량은 선행차량의 감속을 인지하여 적당한 순간에 감속을 하였고, OFFA로 시뮬레이션 한 궤적(파란색)과 비슷한 궤적으로 주행하였다.
Figure 4(b)에서는 본 연구에서 재현하고자 한 운전자 전방 미주시로 인한 위험상황을 확인할 수 있다. 가다서다 교통류 흐름 속에서 선행차량은 두 번의 급감속을 보이며, OFFA로 시뮬레이션 한 후행차량은 선행차량의 움직임에 대응하여 가다서다 현상을 반복한다. d-OFFA로 시뮬레이션 한 후행차량은 선행차량의 첫 번째 감속은 제대로 인지하여 감속을 진행하였지만, 두 번째 감속에서는 전방 미주시로 인해 상황을 제 때 인지하지 못하였다. 후행차량은 선행차량의 움직임을 인지하지 못한 상태에서 일정시간 이상 등가속도 주행을 지속하였으며, 전방 미주시상태가 끝난 뒤에야 감속을 시작하였다. 하지만 선행차량과의 차간거리가 충분하지 못하였기 때문에 후행차량의 최대 감속에도 불구하고 후미 추돌사고가 발생하였다. 이와 같이 사고에 직접적인 영향을 주는 미주시상태를 ‘치명적 미주시(critical distraction)’라고 정의하였다. 주행에 큰 영향을 주지 않는 미주시행태와 치명적 미주시는 주시행태 모형을 통해 확률적으로 결정되며, 동일 차량추종 쌍을 대상으로 시뮬레이션 하여도 매 번 위험상황이 발생하지는 않는다.
한편, 시뮬레이션 결과 직접적인 사고 외에도 운전자의 미주시로 인한 또 다른 교통 현상을 확인 할 수 있었다. Figure 4(c)에서는 가다서다 교통류 흐름에서 후행차량의 전방 미주시로 인해 적절한 가속이 이루어지지 못한 상황이 나타난다. 여기에서 발생한 전방 미주시는 사고로 이어지지는 않았으나, 후행차량의 과소대응(under reaction) 행태를 묘사하였으며, 후행차량을 따라오던 차량(후행차량의 후행차량)의 운전상태에 영향을 줄 수 있다. 본 연구에서는 차량추종 쌍들을 대상으로 한 시뮬레이션만을 수행하였으나, 여러 차량들의 추종상황을 시뮬레이션 할 경우 위험전파(risk propagation)와 같은 다양한 교통 현상들을 관찰할 수 있을 것으로 보인다.

결론
본 논문은 교통사고 등의 위험상황을 시뮬레이션 할 수 있는 차량추종 모형을 제안하는 것을 목표로 하며, 다양한 사고유형들 중에서도 특히 운전자의 전방 미주시로 인해 발생하는 후미추돌 사고에 주목하였다. 이를 위해, 주시행태를 기반으로 운전자의 불완전한 주행행태를 모사하고자 하였으며, 우선적으로 운전자의 전방주시행태를 분석하고 모델링하였다. 분석 과정에서는 운전자의 주시행태에 영향을 미치는 다양한 요소들을 시공간적 범위에 따라 도로환경 변수와 차량주행 변수로 나누었으며, 변수들의 특성에 맞는 방법을 통해 각각이 운전자의 주시행태에 끼치는 영향을 파악하였다. 분석 결과를 바탕으로 계층적 의사결정 나무 분석을 통해 주시행태에 따른 주행환경 시나리오를 도출하였고, 도로환경 변수에 따른 4개의 주요 시나리오와 차량주행 변수의 영향을 고려한 11개의 세부 시나리오를 확인 할 수 있었다. 이어서 시나리오 별로 운전자의 주시 지속시간을 결정할 수 있는 주시행태 모형을 개발하였으며, 이를 기저 차량추종 모형에 결합시켜 d-OFFA를 제안하였다. 제안된 d-OFFA 모형에서는 운전자의 주시상태에 따라 주행행태가 결정되며, 운전자가 전방을 주시할 경우 기저 차량추종 모형과 동일한 행태로 주행하고, 전방을 미주시할 경우에는 가속도를 유지하며 주행한다. 본 연구에서 개발한 모형을 평가하기 위하여 NGSIM 차량궤적 데이터에서 추출한 차량추종 쌍들의 후행차량을 시뮬레이션 하였으며, 그 결과 운전자 전방 미주시로 인한 위험상황들과 선행차량에 대한 과소대응 등의 현상을 관찰할 수 있었다.
본 연구는 운전자의 전방주시행태에 대한 분석과 이해를 바탕으로 사고재현이 가능한 시뮬레이션 개발의 가능성을 제시하였으며, 추후 다양한 운전행태와 연계한 사고재현 연구의 초석을 제시하였다는 점에서 의미가 있다. 그러나 제안한 모형을 실제로 활용하기 위해서는 실제 상황과 비슷한 형태를 구현할 수 있는 지에 대한 추가적 검증이 필요하며, 다양한 사고유형 들을 다룰 수 있도록 모형을 확장하는 작업이 필요하다. 이에 따라 추후 다음과 같은 사항들을 고려한 후속 연구 진행이 필요할 것으로 판단된다. 첫 번째로, 본 연구가 주행 중 차량의 위험상황을 모사하는 것을 목적으로 하고 있는 만큼 다양한 안전지표(safety surrogate measure)를 기준으로 하여 실제 상황과 비슷한 행태를 구현할 수 있는지에 대한 검증이 수반되어야 한다. 또한 실제 주행환경에서 후행차량의 운전 부주의로 인한 후미 추돌사고는 고속 주행환경보다 저속 주행환경에서 더 높은 확률로 발생하는데, 이 상황을 충분히 설명할 수 있는 데이터를 활용한 검증이 필요할 것으로 보인다. 두 번째로, 제한된 주행환경에서 발생하는 일부 사고만을 다루고 있다는 본 모형의 한계를 넘어설 수 있도록 사고유형에 따른 단계적인 모형의 확장이 필요하다. 본 논문에서 언급한 운전자의 전방주시 태만 이외에도 다양한 운전자 요인들이 사고의 원인으로 알려져 있으며, 현재 연구 범위에서 다루고 있지 않은 차량의 횡방향 움직임(차로변경) 또한 주요 사고발생 상황 중 하나이다. 이 과정에서는 현재의 단순화된 주시행태보다 복잡한 주시행태가 고려되어야 하며, 상습 지정체 구간에서 발생하는 차량의 차로변경 모형 역시 추가적인 연구가 필요한 부분이다.
본 연구는 차량 안전과 관련된 다양한 연구에서 활용성이 높으며, 특히 사고예방 및 사고 심각도 감소를 목적으로 하는 다양한 사고방지 시스템들의 성능 평가를 위한 시뮬레이션으로 유용하게 사용될 수 있다. 또한 자율주행 차량의 도입과 관련하여 곧 맞이할 혼합 교통류(mixed-traffic) 상황을 대비하기 위한 시뮬레이션 연구에서도 활용도가 높을 것으로 기대된다. 자율주행 차량과 일반 차량의 운행 효율을 높이는 동시에 안전성을 보장하기 위해서는 운전자들의 돌발 행동에 대비하는 것이 필요하며, 일반 차량과의 상호작용을 충분히 고려한 자율주행 차량 운전행태 모형 및 자율주행 차량용 사고방지 시스템의 개발이 필요하다. 이러한 관점에서 본 연구는 자율주행 차량 개발에 있어 다양한 측면의 가이드라인 제시를 위한 연구에 활용될 수 있을 것으로 보인다.
1)Virginia Tech Transportation Institute
