

서론
개인형 이동장치(Personal mobility, PM)은 First mile과 Last mile의 이동성을 향상시키는 차세대 이동수단으로 각광받고 있다. Shin(2021)의 연구에 따르면 2019년 국내 PM 수요는 14만 3,000대로 전년 대비 약 6.3% 증가했으며 2024년에는 약 30만 대에 이를 것으로 예상된다. 이러한 수요의 급증은 자연스레 여러 가지 문제를 야기했으며, 특히 PM 관련 교통사고는 가장 시급히 처리해야 할 문제 중 하나다. PM 관련 국내 사고는 2018년 225건에서 지난해 897건으로 최근 2년 새 4배로 증가했다(TAAS, 2021). 이를 해결하기 위해 정부가 도로교통법을 개정하고 관련 정책을 수립하고 있으며, 지자체도 자체 조례를 제정하는 등의 다각적인 노력을 기울이고 있다. 그러나 단기 대책인 규제 중심의 네거티브 정책은 이용자와 서비스 제공자에게 민원을 야기하고 산업 발전을 저해하고 있어 다른 대책이 필요하다. PM은 휠의 크기가 작아 주행 자체가 불안정해 작은 장애물에도 위험하다. 따라서 PM의 안전성을 보장하기 위해 안전하게 주행할 수 있는 환경과 인프라를 구축 ‧ 운영해야 하며, PM을 주행할 때 어떤 위험주행상황(Hazardous Driving Events, HDE)이 발생하는지, 어디서 주로 HDE가 발생하는지를 이용자가 파악할 수 있어야 한다.
이러한 배경에서, 본 연구는 다양한 PM 중에서도 국내에서 주로 제공되는 공유킥보드의 HDE를 정의하고, 공간적으로 HDE를 모니터링하는 것을 목표로 한다. 이를 위해 본 연구는 모든 공유 킥보드에 장착된 GPS에서 수집된 주행궤적 데이터를 활용하여 위치기반의 속도 패턴을 통해 식별가능한 종방향 위험주행 상황에 대해 정의하여 이용자가 실제로 어디에서 어떻게 위험하게 주행하는지를 평가하고자 한다. 본 연구에서는 광주광역시에서 수집된 공유킥보드 주행궤적 데이터를 분석에 활용하였다. 분석결과 GIS 분석을 통해 HDE의 핫스팟 위치를 확인할 수 있었다. 또한, HDE가 공간 특성과 이용자 특성에 따라 다르게 나타나는지를 평가하기 위해 통계적 분석을 시행하였다. 본 연구의 결과는 향후 PM의 교통안전을 고려한 적극적인 교통관리 전략 및 데이터 기반 의사결정 자료로 활용될 것으로 기대된다.
선행연구
개인마다 운전 기술과 운전 습관이 모두 다르며, 그중 운전 숙련도가 낮거나 공격적인 운전 습관을 지닌 사람들은 사고에 더 취약하다(Chen et al., 2019; Arvin and Khattak, 2020). 따라서 사고를 예방하기 위해서는 운전 중 HDE를 예방하는 것이 중요하다. 최근의 차량 교통사고와 관련하여, V2X 기술의 발달로 운전자의 주행궤적에 대한 데이터 수집이 가능해지고 있으며, 교통사고와 위험한 미시적 운전행태의 연관성과 관련된 연구가 진행 중이다(Kim et al., 2016). 특히, 차량 운전자의 운전행태는 종방향뿐만 아니라 횡방향으로도 다양한 방식으로 정의되었다(Vanlaar et al., 2008; Oh et al., 2013; Arvin and Khattak, 2020; Xu et al., 2022). 대부분의 연구는 음주운전과 금지약물 복용, 운전 중 휴대전화 사용 등 규제 위반이 사고나 HDE에 미치는 영향을 조사하였다. Vanlaar et al.(2008)은 설문조사에 기반하여 음주운전, 과속, 산만한 운전, 운전 중 휴대전화 사용, 졸음운전, 약물복용의 6가지 위험한 운전행동에 대한 사람들의 인식 수준을 파악하고자 하였다. 분석결과 음주운전 및 약물복용의 경우 충돌 가능성 등 사람들의 우려하는 정도가 높게 나타나 실제 위험도와 일치하였지만 산만한 운전과 운전 중 휴대전화 사용의 경우 실제 위험도와 모순되어 나타나 사람들은 실제보다 그러한 위험 행동이 위험하지 않다고 생각하는 것으로 나타났다. Arvin and Khattak(2020)은 주행궤적 데이터를 활용하여 주의 산만한 운전과 충돌 심각도에 대한 상관성을 조사하고자 하였다. 로지스틱 회귀모델을 통해 충돌과 높은 상관관계를 보이는 원인을 파악하고자 하였으며, 분석결과 운전 중 휴대전화 사용이 충돌 위험도와 가장 높은 상관관계를 보였다. 설문조사에 기반한 연구 외에도 실제 주행궤적을 기반으로 HDE를 정의하고 검지하는 방법을 제안한 연구도 진행되었다. Oh et al.(2013)은 HDE를 정의하고 검지하기 위해 GPS 및 IMU 데이터를 통해 종방향 및 횡방향 HDE를 식별할 수 있는 두 가지 모듈을 개발했다. 해당 연구는 GPS 데이터를 이용한 급가속, 급정지를 정의하고 IMU(관성측정장치) 데이터를 이용한 급좌 ‧ 우회전, 차선변경, 지그재그 주행 등 횡방향 HDE를 정의하고 이를 기반으로 HDE를 검지하는 방법론을 개발했다.
차량 외에도 자전거와 오토바이의 HDE를 정의하고 검지하는 방법을 제안하는 연구도 최근 진행 중이다(Cheng et al., 2015; O'Hern et al., 2021; Eriksson et al., 2022; Zhou et al., 2022; Zhu et al., 2022). O'Hern et al.(2021)은 1,102명의 호주인을 대상으로 자전거 이용자의 행동과 태도가 충돌 빈도와 심각도에 미치는 영향을 조사하였다. 해당 연구결과 과속, 급정지, 역주행, 지그재그 주행 등의 HDE와 음주운전 등의 규제 위반이 충돌 가능성과 상관관계가 있는 것으로 나타났다. Zhou et al.(2022)은 설문조사 결과를 기반으로 위험한 주행행태가 전기자전거 이용자의 안전에 미치는 영향을 이해하기 위해 HDE를 조사하였다. 그러나 설문조사에 기반한 연구의 경우 이용자의 실제 HDE를 조사하는 데 한계가 있으며 HDE는 운전자마다 다르게 인지될 수 있다.
전동킥보드의 경우 HDE에 관한 연구는 진행되지 못했으나, 최근 몇 년간 PM 관련 교통사고가 급증함에 따라 이를 분석한 연구가 진행되고 있다. Carlsson and Lundälv(2019)는 10년 동안 스웨덴에서 발생한 PM 사고와 사고 심각도를 분석하였다. 그 결과 겨울보다는 여름이, 주말보다는 평일에 PM 사고가 많이 발생해 PM 이용률이 높아짐에 따라 사고 또한 많이 발생하는 것으로 나타났다. 인적요인의 경우 특히 남성 운전자의 사고 비율과 사고 심각도가 높게 나타났다. 국내에서도 마찬가지로 PM 교통사고와 사고 심각도를 분석한 연구들이 진행되었다(Han et al., 2020; Han et al., 2021; Kim et al., 2022). Han et al.(2020)은 2017년부터 2018년까지 국내에서 발생한 PM 사고를 대상으로 사고 심각도를 분석하고, 도로 및 환경적 요인, 사고특성 요인, 인적요인으로 구분하여 사고 심각도에 영향을 미치는 요인을 도출하였다. 그 결과 이용률이 높은 5월과 시야 확보가 어려운 야간 시간대에 사고 심각도가 높게 나타났으며, 도로 노면 상태는 젖은 상태일 경우와 인적요인은 사고 당사자가 고령일 경우에 사고 심각도가 높은 것으로 나타났다. Han et al.(2021)은 최근 3년간(2017-2019년) 발생한 PM 및 자전거의 교통사고 특성을 분석하여 문제점을 도출하고자 하였다. PM 교통사고의 경우 전체 교통사고와 비교하였을 때 차량 단독사고 비율이 높으며, 도로 노면상태 및 장애물 확인이 어려운 야간 시간대에 사고가 많이 발생함에 따라 관련 규제 및 안전 관련 연구의 필요성을 강조하였다. Kim et al.(2022)도 최근 3년간 발생한 PM 교통사고를 대상으로 운행환경 및 근린 환경요인이 사고에 미치는 영향을 분석하기 위한 로지스틱 회귀분석을 실시하였다. 분석결과, 주로 인구가 밀집한 공간과 면적이 넓은 공간시설에서 교통사고가 증가하여 인구가 밀집되어 있으며, 단거리 이동이 잦은 지역의 주행환경을 개선하고, 면적이 넓은 공간시설의 경우 안전 시설물 설치가 필수적이라고 주장하였다.
교통사고 데이터를 분석하여 사고에 영향을 미치는 요인을 도출하거나 사고 심각도를 분석한 연구의 경우 미시적인 위험 요인을 파악하는 데에 한계가 존재한다. 특히, 전동킥보드의 경우 휠의 크기가 다른 수단에 비해 작아 도로 위 작은 장애물이나 열악한 도로 노면 상태에도 쉽게 넘어지거나 사고가 나는 등 크게 영향을 받는다. 또한, 전동킥보드 이용자들은 안전장치가 없어 HDE에 더욱 취약하므로 작은 사고에도 중상을 입기 쉽다(Posirisuk et al., 2022). 이는 최근 워싱턴 DC 시민들을 대상으로 진행한 설문조사 결과를 통해서도 확인할 수 있다. 전동킥보드를 이용하다 다친 성인 105명을 대상으로 진행한 설문조사 결과에서 사고 3건 중 2건은 열악한 도로환경이나 도로에 존재하는 장애물에 의한 것으로 나타났다(Cicchino et al., 2021). 이에 본 연구에서는 전동킥보드 안전사고와 밀접한 연관이 있는 주행 상황인 전동킥보드 HDE를 정의하고 이를 식별할 수 있는 방법론을 개발하였다. 또한, 본 연구는 전동킥보드의 HDE가 토지 유형 특성 및 인적요인에 영향을 미치는지에 대한 여부를 파악하기 위한 통계분석을 실시했다.
전동킥보드의 위험주행 상황
전동킥보드 주행 시 발생할 수 있는 HDE는 주행궤적 데이터를 활용하여 크게 두 개의 유형으로 분류할 수 있다. 첫째, 운전자가 독립적으로 주행 중 과속, 급가속 또는 급감속과 같은 위험을 감수하는 행동을 유발하여 발생하는 상황이다. 이는 운전자의 공격적인 운전 성향에 따라 발생할 수 있으며, 이동 가능한 비고정적 물체 등에 의해 갑작스럽게 발생하는 각종 상황에 의해 발생할 수 있다. 둘째, 과속방지턱이나 도로의 포트홀과 같은 다른 수단에는 위험한 상황이 아니지만, 상대적으로 휠의 크기가 작은 전동킥보드에는 위험한 상황이다. 전동킥보드가 이와 같은 위험한 상황을 통과하는 동안 주행궤적에 HDE가 기록된다. 본 절에서는 전동킥보드의 HDE 유형별 각 세부항목에 대해 정의하고 각 HDE를 검지하는 방법론을 제안하고자 한다.
1. 전동킥보드의 HDE 정의
Figure 1은 전동킥보드 HDE의 개념도로 HDE는 주행궤적 데이터를 기반으로 지정된 임계값에 따라 검지할 수 있다. 전동킥보드 HDE 유형 중 첫 번째 유형의 경우 과속, 급가속, 급정지, 급회전, 지그재그 주행의 6가지로 나뉜다. 해당 HDE는 종방향 HDE와 횡방향 HDE의 두 가지로 다시 분류된다. 종방향 HDE에는 과속, 급가속, 급감속, 급정지 등이 있으며, 횡방향 HDE에는 급커브와 지그재그 주행이 있다. 과속은 국내 도로교통법에서 제시한 제한속도 25km/h를 위반한 경우를 의미한다. 급가속 또는 급감속은 안정적인 주행 조건보다 높은 가속 또는 감속한 경우를 의미한다. 급정지는 일정 속도 이하로 속도가 급격히 떨어진 뒤 정지하는 경우를 의미한다. 급회전은 운전자가 일반적인 주행 상황보다 더 빠르게 회전하는 경우로 속도, 회전각 및 전동킥보드의 기울기 값의 임계값을 통해 식별할 수 있다. 지그재그 주행은 운전자가 정해진 짧은 시간 내 좌우로 여러 번 반복하여 주행하는 경우를 말한다.
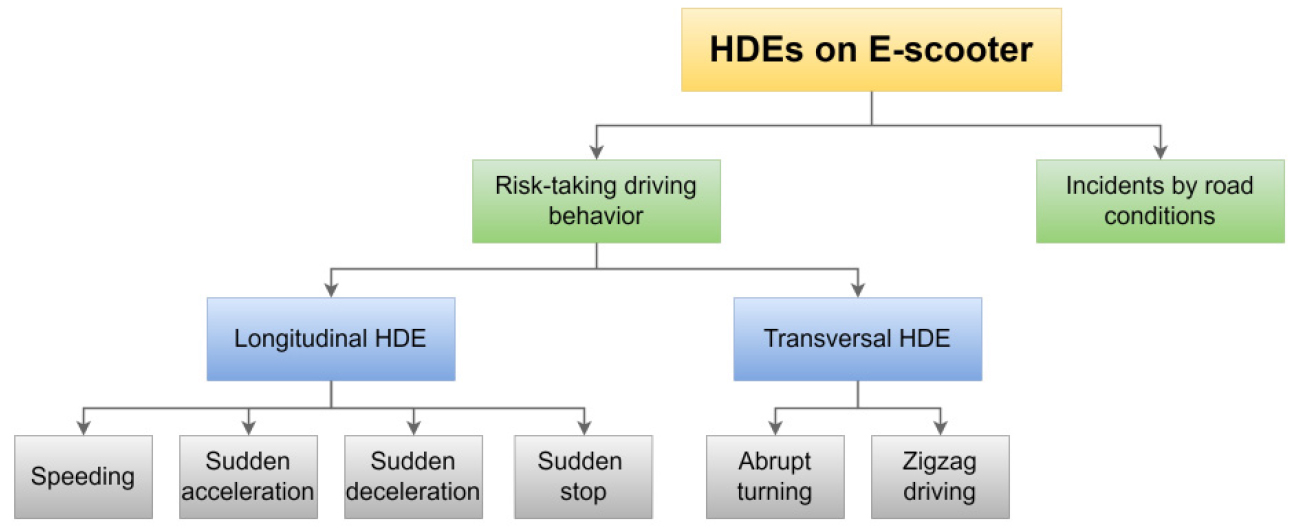
두 번째 유형은 전동킥보드가 과속방지턱, 포트홀, 연석 및 울퉁불퉁한 도로면과 같이 위험한 상황을 야기하는 도로조건을 주행할 때 발생한다. 전동킥보드를 이용하여 과속방지턱을 통과할 경우 운전자가 저속으로 주행한다면 큰 문제가 없지만, 고속으로 주행하면서 과속방지턱의 높은 턱을 지나는 경우 운전자가 넘어질 수 있다. 따라서 전동킥보드의 주행환경을 평가할 때는 도로의 과속방지턱도 고려한 도로의 위험도를 진단할 수 있어야 한다. 포트홀은 전동킥보드의 바퀴가 구멍에 빠지면서 운전자가 넘어지는 원인이 될 수 있다. 운전자가 포트홀을 통과하면 전동킥보드의 pitch 값이 빠르게 변화하여 운전자가 균형을 잃기 쉽다. 또한, 자전거도로의 연석도 전동킥보드 주행에 있어 장애물이 될 수 있다. 특히 전동킥보드의 휠 크기보다 높이 차이가 큰 연석을 통과할 때 사고로 이어질 수 있다. 울퉁불퉁한 도로면은 작은 돌과 도로의 파편과 같은 작은 장애물로 인해 위험한 상황을 초래할 수 있다. 정부와 지자체는 전동킥보드 이용자에게 보다 안전한 도로와 주행환경을 제공하기 위해서는 도로 포장상태를 진단하고, 울퉁불퉁한 노면을 포장하는 등의 재정비하는 것이 필요하다.
2. GPS 데이터 기반 종방향 HDE 검지
HDE를 검지하기 위한 방법론을 제안하기에 앞서 전동킥보드의 종방향 및 횡방향 HDE에 대한 정의를 하였다. 본 연구에서는 GPS 장치를 통해 수집가능한 속도와 가속도 값에 기반하여 종방향 이벤트를 식별하는 방법론을 우선 제시하고자 한다. 횡방향 이벤트의 경우 회전각, 기울기 등과 같은 각속도를 통해 식별되므로 각속도계 센서가 반드시 필요하다(Oh et al., 2013). 현재 민간 회사의 전동킥보드 장치는 GPS는 필수로 장착되어 있어 종방향 이벤트를 식별하는 데에 추가 장치 및 센서가 필요하지 않다, 해당 GPS에서 수집된 속도 및 가속도 정보만을 활용하여 운전자에게 적절한 정보와 도움을 줄 수 있는 HDE 감지 방법론을 제시하는 것이 목적이다.
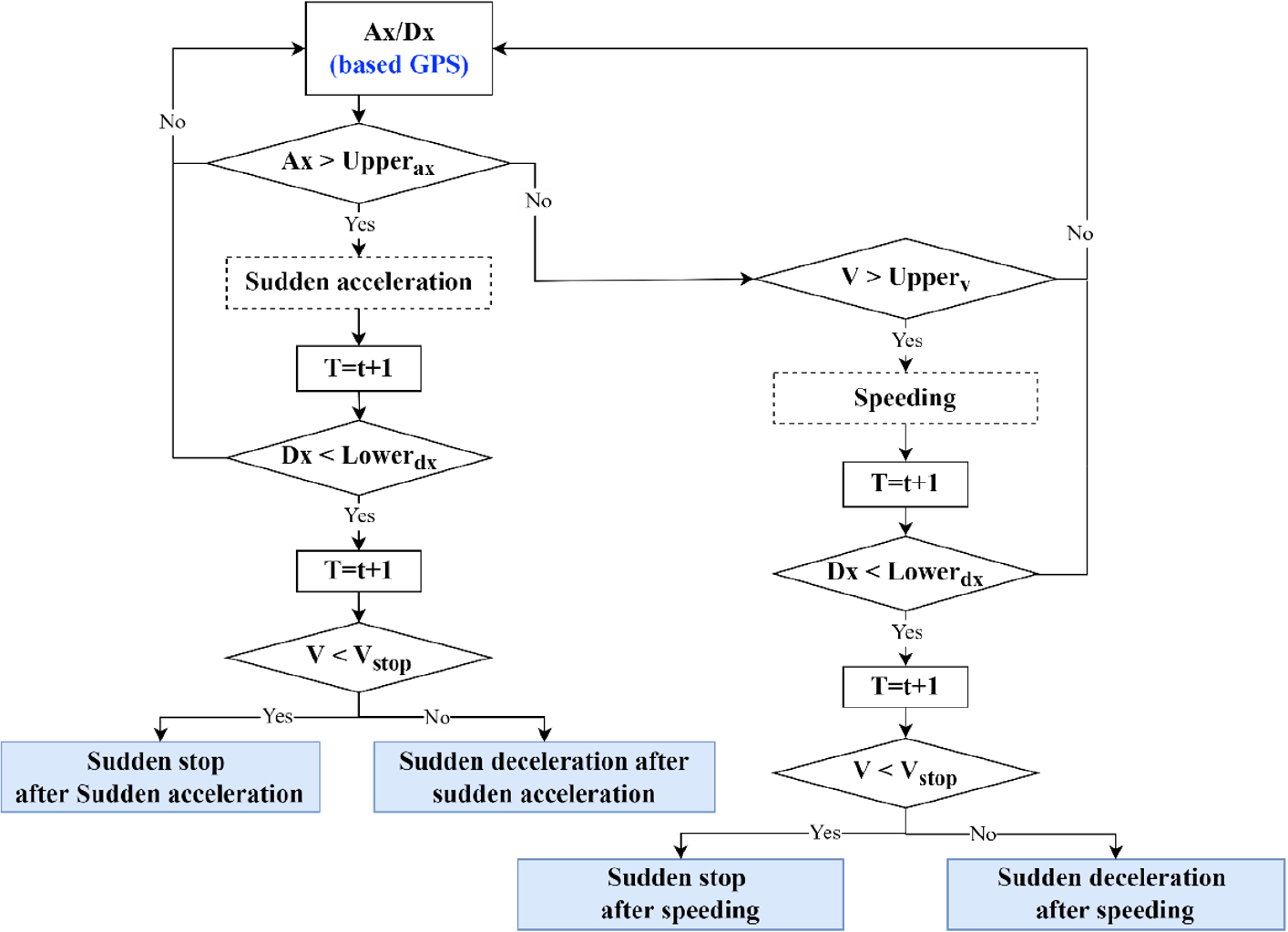
Table 1은 HDE를 정의하고 이를 식별하기 위한 매개변수를 제시한다. 제안된 전동킥보드의 HDE 식별 알고리즘 Figure 2와 같이 과속, 급가속 및 급감속, 급정지를 포함하는 종방향 HDE를 검지할 수 있다. 본 연구에서 제안하는 종방향 HDE는 4가지 유형으로 분류된다: 1) 급가속 후 급감속, 2) 급가속 후 급정지, 3) 과속 후 급감속, 4) 과속 후 급정지. 해당 알고리즘은 전동킥보드의 관측된 주행속도와 속도 상한값()과의 비교를 통해 과속을 검지한다. 국내 제한속도인 시속 25km를 넘는 속도가 과속으로 검지된다. 또한, 관측된 종방향 가속도 값 또는 감속도 값을 주어진 한계 임계값인 , 와 비교하여 안전하지 않은 감속 및 가속을 검지한다. 한계 임계값 내 위치한 주행의 경우 정상적인 주행행태를 나타낸다. 마지막으로 해당 알고리즘은 전동킥보드의 관측된 주행속도와 가속도 데이터를 분석하여 위험한 급정지를 검지한다. 전동킥보드가 정지상태로 간주하는 속도 까지 급감속하는 데 정상적으로 정지하는 데 걸리는 시간보다 짧은 시간인 한계 임계값 내에 정지할 때 급정지로 검지한다.
Table 1.
Parameters associated with algorithm
사례분석
1. 데이터의 수집
본 연구에서는 2021년 9월 17일(금)부터 2021년 9월 23일(목)까지 일주일간 광주광역시에서 수집한 공유킥보드 주행궤적 데이터를 활용하였다. 해당 데이터는 ㈜PUMP가 운영하는 ‘씽씽’ 공유 킥보드 서비스를 이용하는 이용자들의 1초 단위의 주행궤적 데이터의 이력으로 총 450,204건의 GPS 데이터로 구성되어 있다. 이는 킥보드 기기 정보, 주행 일시정보, 위치 정보 등이 포함된 데이터이다. 본 연구는 해당 궤적데이터와 공유 킥보드 이용자 정보를 매칭시켜 성별과 연령의 인적요인에 따른 HDE의 차이를 분석하고자 하였다. Figure 3은 성별, 연령대별 주행궤적을 지도에 나타낸 것으로 이를 통해 대부분의 공유 킥보드 이용자들이 광주 도심에서 주행하는 것을 알 수 있다. 또한, 남성 이용자가 여성 이용자보다 이용반경이 더 넓으며, 연령대가 낮아질수록 이용반경이 더 넓어지는 것을 알 수 있다. Table 2는 일주일 동안 공유 킥보드를 이용한 성별, 연령대별 이용자 수와 통행량을 보여준다. 수집된 총 422건 중 남성 이용자는 총 342명, 여성 이용자는 총 80명으로 남성 이용자가 여성 이용자보다 4.2배 많았으며, 하루 평균 통행량도 남성이 여성의 3.6배 많은 것으로 나타났다. 이용자 수와 하루 평균 통행량이 가장 많은 연령대는 20-24세이며, 다음으로는 25-29세 연령대의 이용자로 나타나 20대 이용자가 전체 이용자의 73%를 차지하는 것으로 나타났다. Figure 4는 각 연령대의 시간대별 공유킥보드 이용량을 나타낸다. 20대를 제외한 연령대의 경우 모두 점심시간인 13-15시와 저녁 시간인 17-19시에 이용량이 가장 많은 첨두시간대로 나타났으나, 20대의 경우 오후 10시 전후 시간대에 이용량이 가장 많은 것으로 나타났다. 이는 2021년의 공유 킥보드 이용량으로 해당 일자에 국내 코로나19 방역 지침에 따라 영업시간을 오후 10시로 제한하였기 때문으로 볼 수 있다.
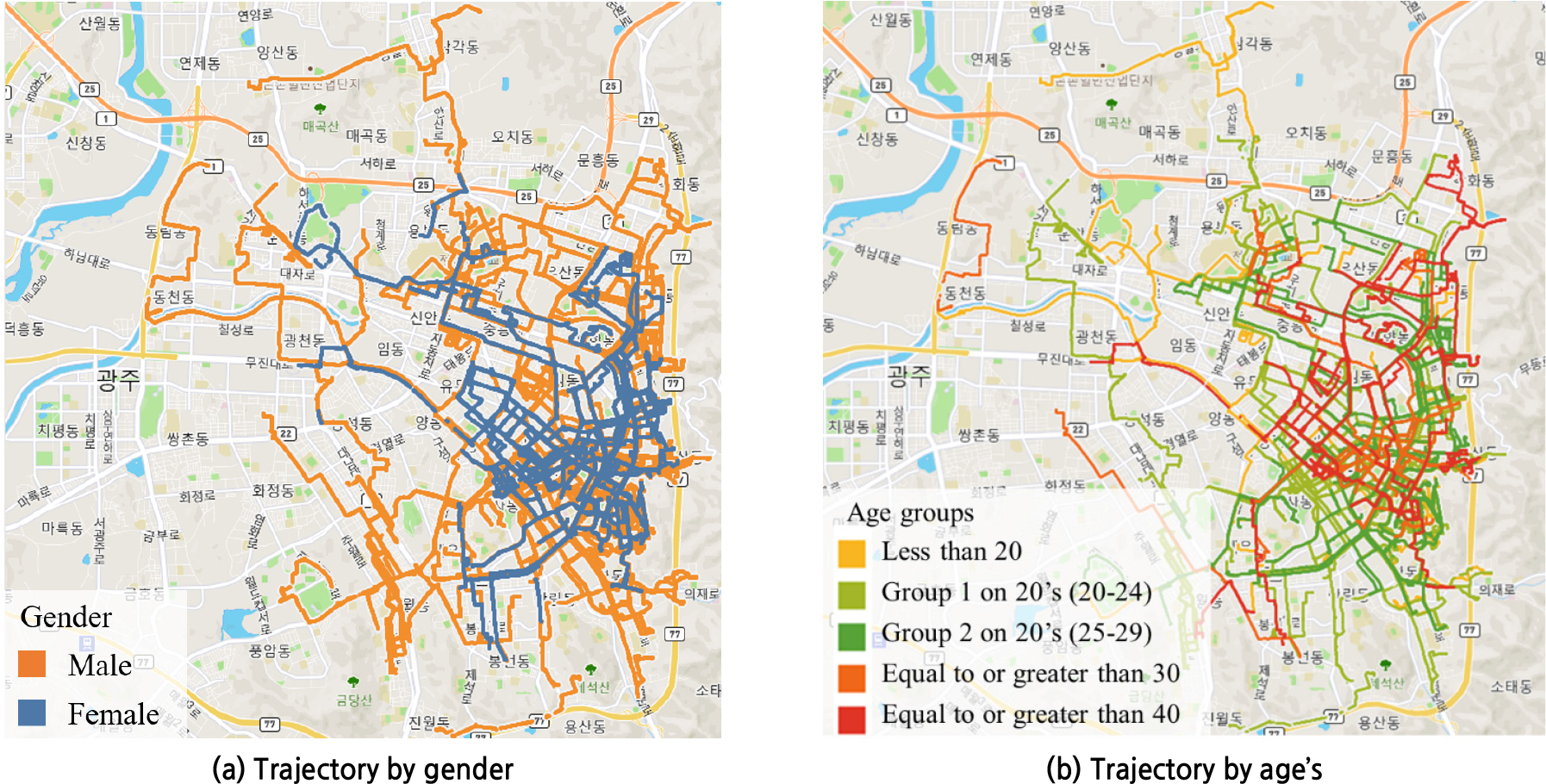
Table 2.
Descriptive statistics of E-scooter trajectory

2. 데이터의 전처리
HDE를 식별하기에 앞서 본 연구에서는 주행궤적 데이터를 분석에 활용하기 위해 전처리 과정을 거쳤다. 본 연구에서는 주행궤적 데이터의 전처리를 위해 데이터 클리닝, 데이터 오류보정의 두 가지 단계를 수행하였다. 먼저 데이터 클리닝을 위해 데이터의 null 값, 이용자 정보와 매칭되지 않는 값, 이상치를 제거하였다. 전동킥보드의 특성상 속도 및 가감속의 물리적 한계가 존재하므로 물리적 한계를 벗어나는 값은 이상치로 분류하였다. 이상치는 세 가지 유형으로 분류할 수 있다: 1) 속도가 일반 전동킥보드보다 현저히 높은 경우, 2) 가속도가 비정상적으로 큰 경우, 3) 감속도가 비정상적으로 작은 경우. 이상치를 판단하기 위한 증거기반의 임계값을 설정하기 위해 실제 전동킥보드를 주행하여 최고 속도 및 최대 가감속도를 수집하는 실험을 진행하였다. 또한, 전동킥보드의 특성상 속도 및 가감속도의 기계적 한계가 존재하여 이를 고려하고자 전동킥보드 기기 스펙을 참고하였다. 본 연구의 실험에 활용된 전동킥보드와 수집된 데이터의 전동킥보드의 스펙은 동일하나 해당 업체에서는 자체개발된 전동킥보드 기기를 사용하여 상세 스펙을 공개하고 있지 않아 정확히 알 수 없었다. 이에 따라 대부분의 국내 업체(㈜지바이크-지쿠터, ㈜디어코퍼레이션-디어, ㈜플라잉-플라워로드, ㈜빔모빌리티코리아-빔, ㈜더스윙-스윙, ㈜올룰로-킥고잉 등)에 사용되는 전동킥보드 기기의 스펙을 참고하였다(Table 3). 실험은 총 10명의 피실험자로 구성되며, 각 피실험자는 정해진 시나리오 내에서 최고 속도 및 최대 가속 ‧ 감속하도록 요청받았다. Table 4는 피실험자의 실험 결과값을 요약한 것이다. 실험결과 속도는 최고 속도의 표준오차를 고려한 27km/h 이상이면 이상치로 분류하였다. 가속도의 경우 정지상태에서 가속할 때는 최대 초속 4.86km/h까지 가속할 수 있었으나 주행 중 최대 가속도에 이르렀을 때는 초속 8.83km/h까지인 것으로 나타나 본 연구에서는 표준오차를 고려하여 가속도의 이상치 기준으로 9.29km/h로 결정하였다. 감속도는 실험을 통해 관측된 최소 감속도가 -14.82km/h로, 마찬가지로 표준오차를 고려한 -15.59km/h 이하인 경우는 이상치로 분류하여 분석대상에서 제외하였다. 이를 통해 총 450,204건에서 유의미한 데이터 341,403건을 추출하였다.
Table 3.
Specs of shared E-scooter
| Variable | Specs |
| Model | Ninebot Kicksooter-max |
| Weight | 19.1kg |
| Max. speed | 25km/h |
| Dimensions | 1,167×472×1,203mm |
| Typical range | 65km |
| Battery | 42V, 551Wh |
| Tire | 10in |
Table 4.
Descriptive statistics for experiment
다음 단계는 데이터 클리닝 과정을 거친 데이터가 논리적으로 비정상인지 아닌지에 대한 여부를 진단하는 과정이다. 공유킥보드에 장착된 GPS 장치의 정확도와 수신의 문제로 인해 주행 궤적데이터의 오류 및 결측치가 다수 존재한다. Figure 5는 데이터의 네 가지 논리적 오류사례를 나타내는 개념도이다: a) jumping, b) ping-pong, c) redundancy, d) missing. 본 연구에서는 해당 오류사례를 식별하고 이를 보정하기 위해 쉽게 구현할 수 있는 규칙기반 방법론(rule-based methodology)에 기반한 알고리즘을 제안하였다.

Figure 6은 각 오류의 사례를 유형화하여 이를 보정하기 위해 제안한 알고리즘이다. 해당 알고리즘에서 는 주행궤적이 기록된 타임스탬프(sec)를 의미한다. 본 연구에서 활용된 데이터는 1초 간격으로 기록되어 데이터 간격이 1초가 아닐 때는 데이터가 중복된 Redundancy와 데이터가 누락된 Missing으로 분류된다. 중복 값이 여러 개 동시에 발생한 경우 중복 값의 속도가 동일하면 데이터 기록 시각()의 행을 제거한다. Missing의 경우 데이터가 기록된 시간 간격 1초 이상일 경우 결측치로 간주하여 거리에 기반하여 결측값의 속도를 평균하여 보정한다. 는 초 단위로 기록된 위 ‧ 경도에 기반한 위치이다. Jumping과 ping-pong을 분류하기 위해 기록된 위치가 주행궤적을 포함한 도로 링크의 유효 반경에 포함되는지를 확인하였다. 유효 반경은 주행궤적에 기반해 운전자가 주행한 ITS 표준노드링크 기준 도로 링크의 반경 6m를 적용하였다. Jumping과 ping-pong을 보정하기 위해 주행궤도에서 시간 순서에 따라 위도와 경도를 평균하여 데이터의 위치를 조정하였다. Table 5는 오류보정 알고리즘을 통해 도출된 각 오류의 사례를 요약한 표이며, 데이터클리닝을 거친 341,403건에서 총 312,800건의 전처리 완료된 데이터를 분석에 활용하였다.
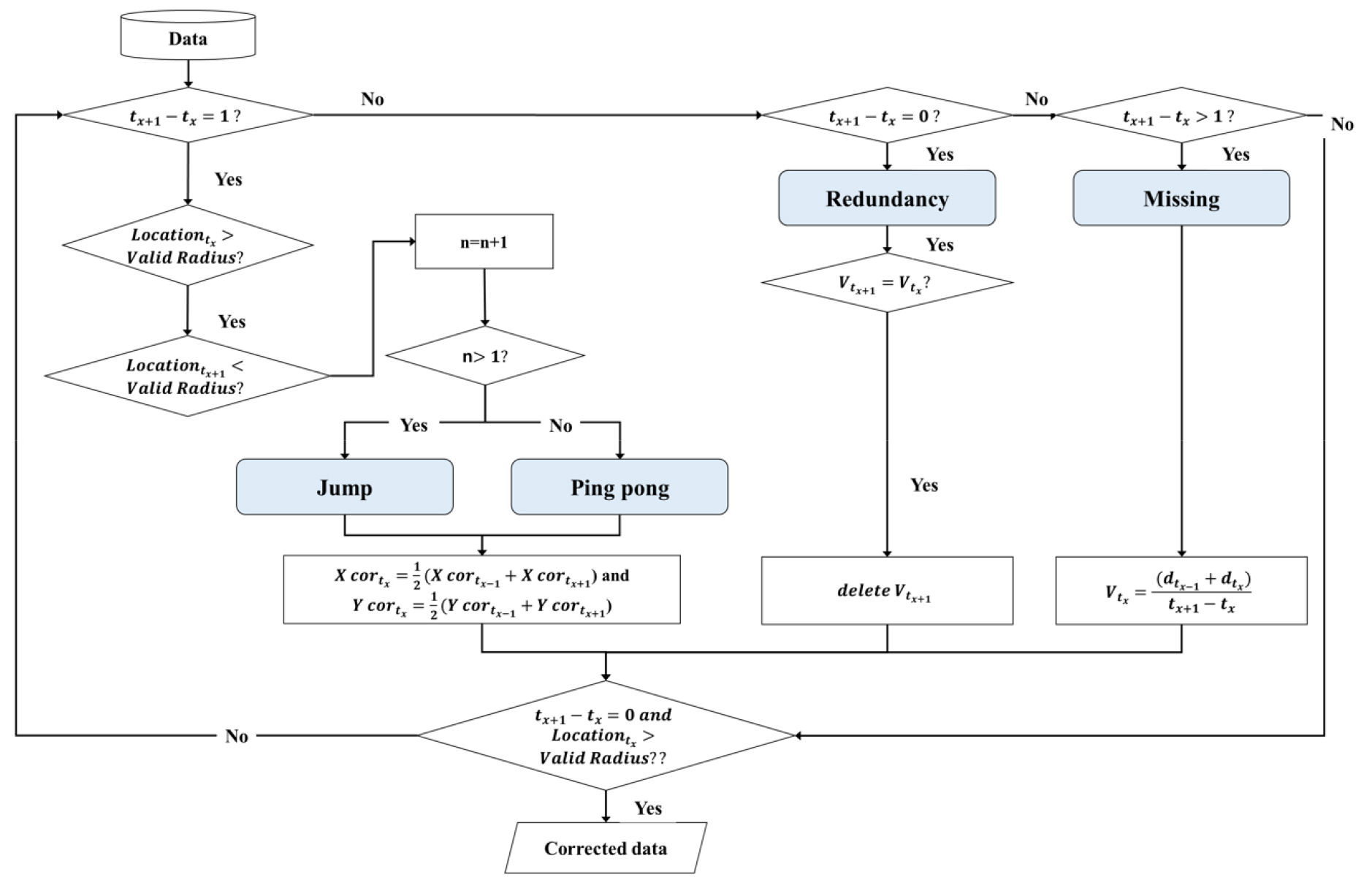
Table 5.
Summary of logical error
| Variables | Total (case) | Proportion (%) |
| Redundancy | 2,899 | 0.01 |
| Missing | 8,017 | 0.02 |
| Jump | 7,251 | 0.02 |
| Ping pong | 10,436 | 0.03 |
| Total | 28,603 | 0.08 |
3. 분석결과
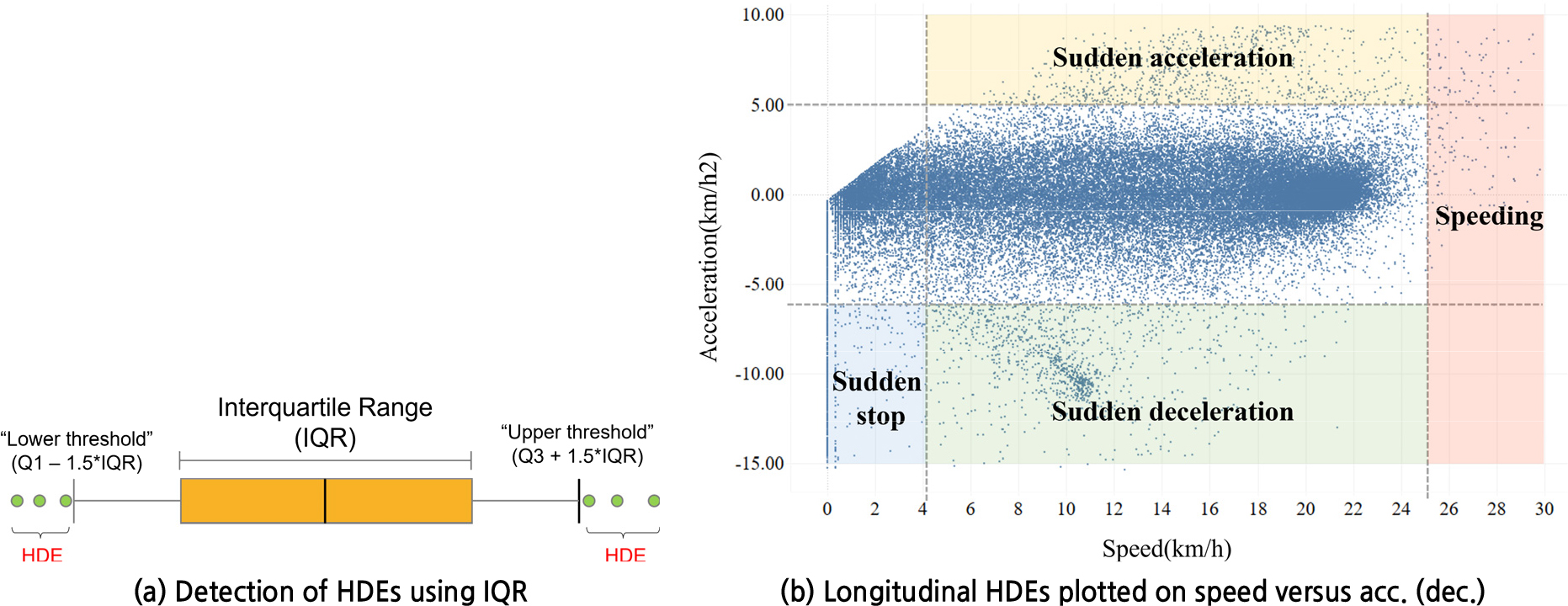
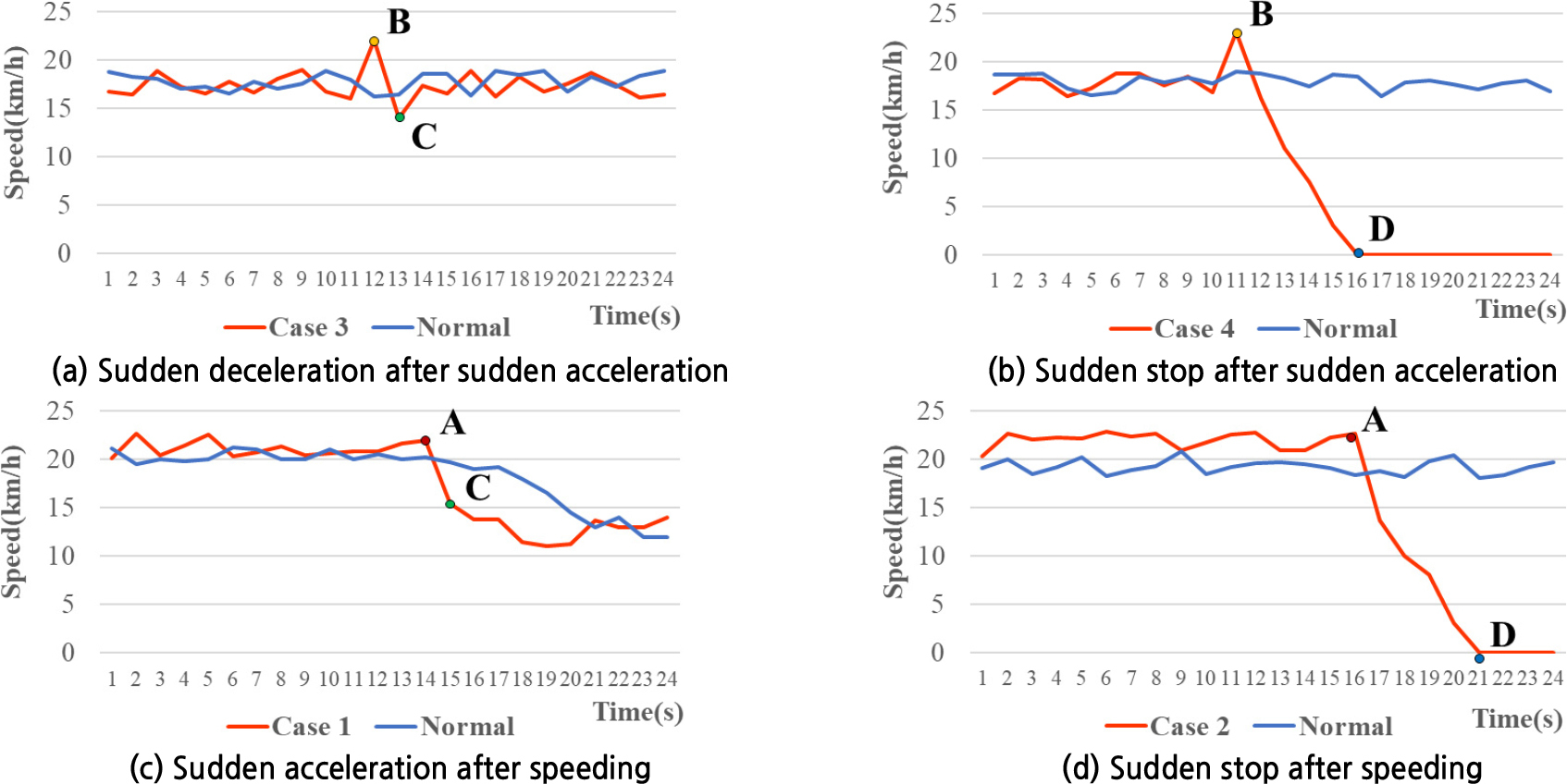
본 연구에서는 4개의 HDE를 분류하기 위한 임계값을 설정하였다. 앞서 제안된 위험주행 식별 알고리즘에 기반하여 설정된 임계값을 초과하는 경우 HDE로 식별된다. 본 연구에서 활용된 데이터인 공유킥보드의 경우 속도 25km/h로 최대속도가 제한되어 있어 일반적인 주행 상황에서 주행속도가 시속 25km를 넘지 않아 과속 임계값은 시속 25km 이상으로 결정되었다. 급가속 및 급감속의 임계값을 설정하기 위해서는 이상값 탐지(anomaly detection)의 일반적인 방법 중 하나인 IQR(사분위수 범위)를 사용하였다(Frigge et al., 1989; Hong et al., 2003). Figure 7(a)와 같이 가감속도의 IQR을 기준으로 상한 임계값과 하한 임계값을 각각 급가속과 급감속의 임계값으로 설정하였다. 급가속은 초당 5km/h 이상의 가속인 경우, 급감속은 초당 -6km/h 미만의 감속인 경우를 의미한다. 급정지는 초당 -6km/h 미만의 감속 뒤 주행속도가 4km/h 미만이 된 경우를 의미한다. Figure 7(b)는 설정된 컷오프 임계값을 적용하여 속도-가감속도 그래프에 표시된 각각의 종방향 HDE를 보여준다. Figure 8은 정상적인 주행과 각 HDE 유형에 따른 안전하지 않은 주행을 비교한 것이다. 정상 주행과 비정상적인 HDE 간의 분명한 차이가 관찰되었으며, 이는 GPS 센서 데이터를 기반으로 안전하지 않은 주행 상황을 검지할 수 있음을 시사한다.
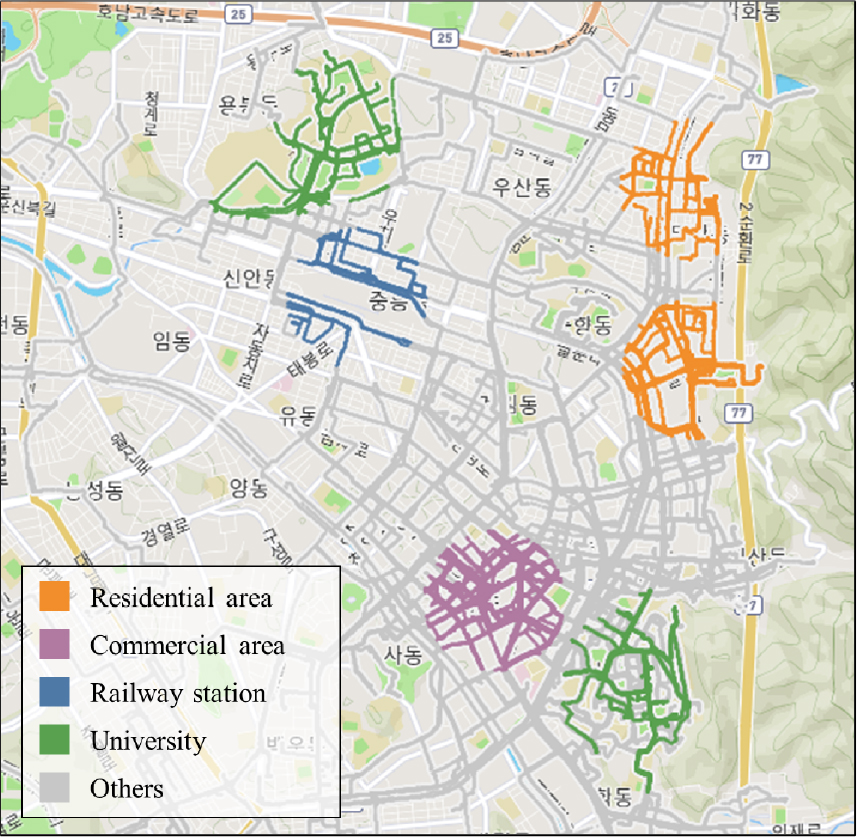
다음으로 제안된 HDE 검지 방법론을 통해 실제 광주광역시 공유킥보드 HDE를 모니터링하고자 한다. 또한, 본 연구에서는 토지이용 유형이 HDE에 영향을 미칠 것으로 예상하여 각 토지이용 유형별 HDE의 차이를 파악하고자 한다. 토지이용 유형은 주거지역, 상업지역, 철도역 인근, 대학가로 구분하였다. 주거지역은 두암동 일대 아파트 단지 2곳의 반경 500m 지역, 상업지역은 광주광역시 최대 상업지역인 문화단지역 인근 500m, 철도역은 광주역 인근 500m, 마지막으로 대학가는 조선대학교와 전남대학교를 포함한다. 전체 면적은 주거지역 1,570,796㎡, 상업지역과 철도역이 각각 785,398㎡, 대학교가 총 1,659,378㎡이다(Figure 9).
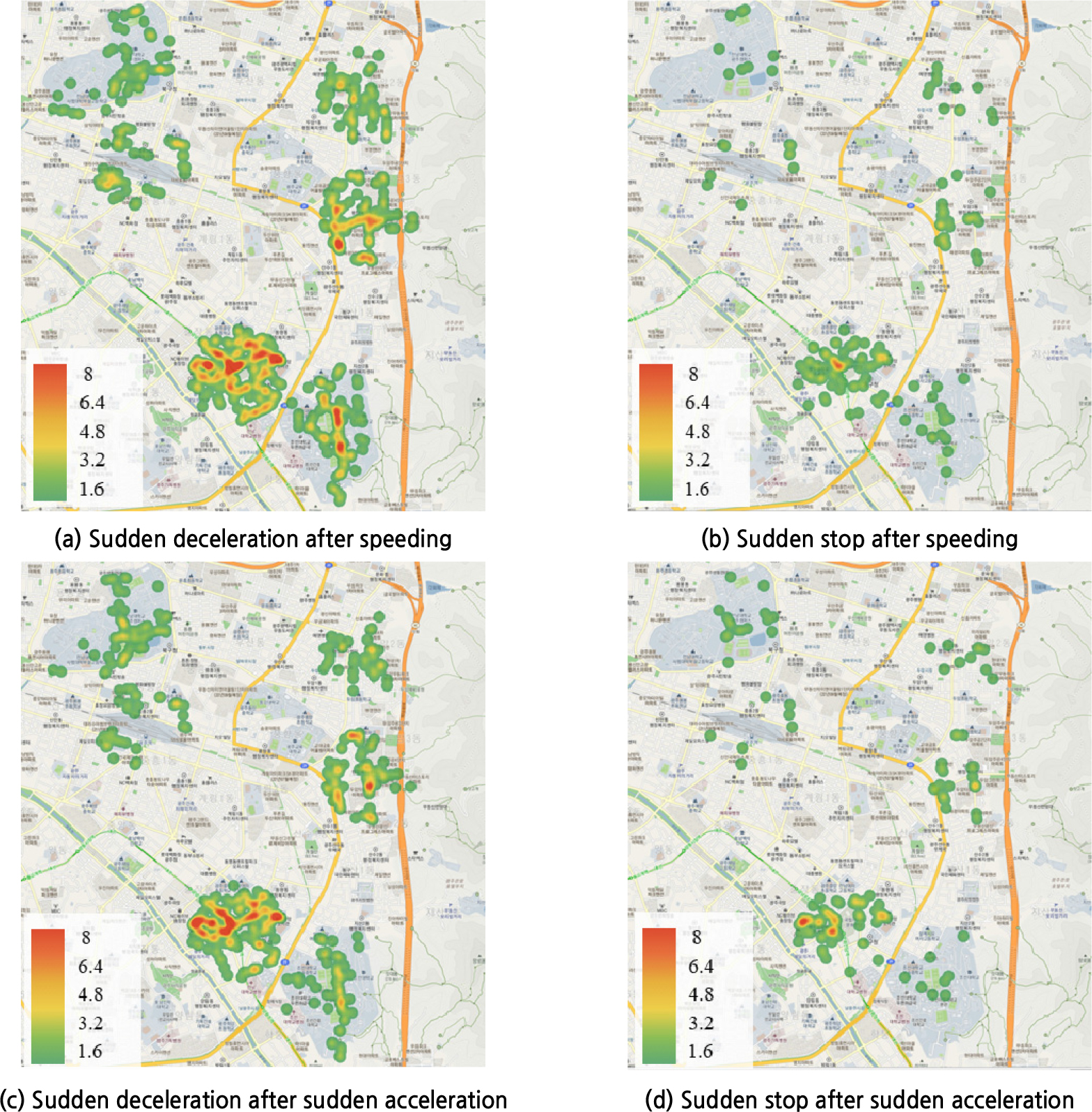
광주광역시의 각 토지이용 유형별 제안된 HDE 검지 방법론을 통해 HDE 유형별로 이를 검지하고 모니터링하였다. Figure 10은 각 HDE 유형에 대한 핫스팟 분석(Getis-Ord Gi*) 결과를 나타낸다. 분석결과 총 1,328개의 HDE가 확인되었다. 과속 후 급감속이 842건으로 가장 많은 것으로 나타났으며 그 뒤로 급감속 후 급가속 247건, 과속 후 급정지 148건, 급가속 후 급정지 91건 순으로 나타났다. 각 공간별 HDE 빈도를 비교하기 위해 면적 대비 HDE 수()로 산정하였다. 면적당 HDE 빈도가 가장 많은 지역은 상업지역으로 3.70건이었으며, 철도역(3.16), 주거지역(2.22), 대학교(1.37) 순으로 나타났다.
앞서 정의한 바와 같이 전동킥보드 HDE는 이용자의 운전 성향 및 습관으로 인해 발생하거나 도로환경 및 주행 중 마주칠 수 있는 타 수단, 보행자, 이동가능한 장애물 등과 같은 비고정적인 물체로 인해 발생할 수 있다. 공유킥보드의 이용자의 운전 성향 및 습관은 성별과 연령대와 같은 인적요인을 통해 파악가능하며, 주행 중 마주치는 상황은 토지이용특성과 자전거도로의 유무와 같은 공간 특성을 통해 파악할 수 있다. 본 연구에서는 HDE 분포가 공유킥보드 이용자의 인적요인과 공유킥보드 이용 공간특성에 따라 다를 것으로 가정하여 인적요인 및 공간특성에 의한 HDE 분포의 이질성을 파악하기 위한 추가분석을 실시하였다. 자전거도로의 유무에 따른 HDE의 분포를 파악하기 위해서는 자전거도로망에 대한 데이터가 필요하나 해당 데이터는 현재 구축되어있지 않아 우선 광주광역시의 자전거도로에 대한 GIS DB를 구축하였다. Figure 11은 작성된 광주광역시 자전거도로망이며, 이는 카카오의 지도서비스인 카카오맵(kakao map) 내에서 제공되는 자전거도로 위치 정보를 활용하여 작성하였다.
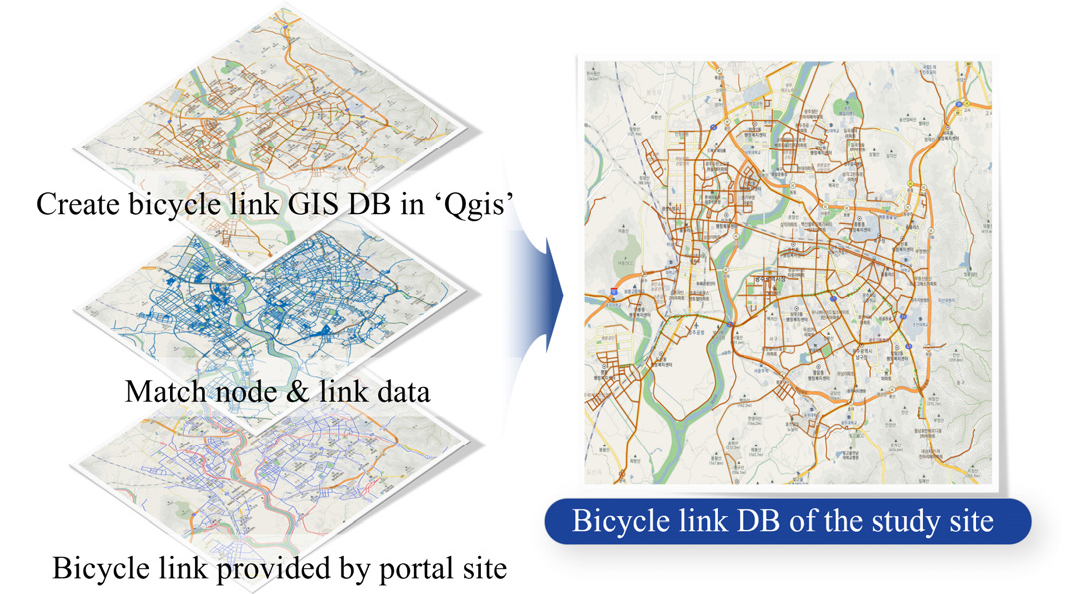
Table 6은 4개의 요인(성별, 연령, 토지이용특성, 자전거도로 유무)에 따른 HDE 빈도의 평균 차이를 분석한 결과로, 두 집단 간의 평균 차이 분석이 가능한 독립표본 t검정(t-test)과 세 집단 이상의 평균 차이 분석이 가능한 일원배치 분산분석(ANOVA)를 실시하였다. 각 4개의 요인 모두에서 유의확률 0.05 미만으로 유의한 차이가 있는 것으로 나타났다. 먼저 성별에 따른 HDE의 빈도 평균은 남성 1.45건, 여성 1.38건으로 남성이 HDE의 빈도가 더 높은 것으로 나타났다. 연령대의 경우 20-24세의 이용자가 1.47건으로 가장 높은 빈도를 보였으며, 40세 이상의 이용자에서 1.27로 가장 낮은 빈도를 보이는 것으로 나타났다. 다음으로 공간 특성에 해당하는 토지이용특성의 경우 주거지역이 2.17건으로 빈도가 가장 높게 나타났으며, 대학교가 1.20건으로 가장 낮은 빈도를 보이는 것으로 나타났다. 자전거도로의 경우 자전거도로가 없는 경우에 HDE 빈도가 1.52건, 자전거도로가 있는 경우 1.33건으로 자전거도로가 없는 경우 HDE 빈도가 높게 나타났다.
Table 6.
The result of the t-test or ANOVA test for individual variables
결론
PM은 친환경 교통수단이자 대중교통의 first mile/last mile을 보완할 수단으로 이용량이 급증하고 있는 수단이다. 이에 따라 관련 교통사고도 증가하고 있어 안전 관련 대책이 시급하나, 안전 관련 연구는 부족하여 과학적 근거에 기반한 안전대책 마련이 되지 못하고 있는 실정이다. 이에 따라 본 연구에서는 공유 킥보드의 GPS 데이터 기반 위험한 주행 상황에 대해 정의하고 이를 검지하는 방법론을 제안하였다. HDE는 이용자가 위험을 감수하는 행동뿐만 아니라 안전하지 않은 도로환경을 주행할 때의 위험주행 상황에 대해서도 정의되었다. HDE는 이용자가 위험을 감수하는 행동뿐만 아니라 안전하지 않은 도로환경을 주행할 때의 위험주행 상황에 대해서도 정의되었다. 국내에서 운영 중인 모든 공유킥보드 기기는 GPS 장치를 장착하고 있어 속도 및 가속도 정보는 알 수 있으나 차체의 기울기, 회전각 등의 정보는 추가적인 장치를 필요로 한다. 이러한 배경에서 우선적으로 현재 수집가능한 속도 및 가속도 정보를 활용한 위험운전 상황을 정의하고자 하였다. 본 연구에서는 규칙기반 방법론에 기반하여 실제 사람들이 생각하고, 주행하는 최대 가속, 감속 또는 급정거와 같은 실험을 통해 밝혀낸 증거를 통해 네 가지 종방향 HDE를 분류하였다. 본 연구에서는 광주광역시의 각 공간별로 종방향 HDE를 모니터링하기 위해 핫스팟 분석과 통계 분석을 실시하였다. 그 결과 면적 대비 HDE 비율이 상업지역에서 가장 높게 나타났으며, 대학교에서 가장 낮은 것으로 나타났다. 이는 상업지역의 경우 대학교보다 보행자 혹은 타 수단 등의 통행량이 많으나 도로 폭이 좁고 다양한 구조물도 많아 이로 인해 발생할 수 있는 위험한 상황이 잦은 것으로 보인다. 통계 분석을 통해서는 인적요인과 공간 요인에 따른 이질성을 판단할 수 있었다. 분석 결과 4가지 요인(성별, 연령, 토지이용특성, 자전거도로)에서 모두 유의한 차이를 보여 인적요인과 공간 특성에 따라 HDE의 분포가 상이한 것으로 나타났다. 특히 인적요인의 경우 남성 이용자와 25-29세 이용자에서 위험한 주행 행동을 자주하는 것으로 보여졌다. 공간 특성의 경우 주거지역에서 자전거도로가 없는 경우에서 HDE 빈도가 높은 것으로 나타났다. 주거지역의 경우 면적 대비 HDE 비율은 다른 공간에 비해 낮게 나타났으나 단순 HDE 빈도는 높은 것으로 나타났다. 본 연구는 기존 공유킥보드에 장착되어 있는 GPS장치에서 수집된 정보를 활용한 종방향 HDE를 정의, 검지하는 방법론을 제안하였다. 이는 추가 장치 없이 현재 수집되는 정보만을 활용해 운전자에게 적절한 안전정보를 제공할 수 있다는 것에 의의가 있으며, 위험주행이 잦은 지역과 해당 지역의 사례분석을 통한 지역적 특성을 파악할 수 있었다. 다만 추가 장치를 필요로 하는 횡방향 HDE는 정의할 수 없었다. GPS 장치를 통해 수집되는 위치 정보를 통해 계산되는 속도 및 가속도의 경우에는 오차가 커진다는 단점이 있어 이를 극복하고자 본 연구에서는 GPS 오차 보정 알고리즘을 제안하였다. 향후 연구에서는 GPS 장치 외에도 3차원 가속도 및 각속도 센서로 이루어진 IMU(관성측정장비)가 장착된 전동킥보드로부터 수집된 데이터를 활용하여 정확도를 높이고자 한다. IMU 데이터를 기반으로 GPS 장치만으로는 수집할 수 없었던 Yaw, Roll, Pitch 변수를 통해 종방향 HDE 뿐만 아니라 횡방향 HDE와 주행환경에 따른 HDE를 모니터링할 수 있는 방법론을 제안하고자 한다. 또한, PM의 경우 자전거도로의 여부, 보행자도로의 폭, 도로면의 상태, 장애물의 여부 등과 같은 도로 기하구조 및 도로노면상태에 영향을 많이 받기에 추후 PM이 주로 주행하는 이면도로와 자전거도로의 기하구조 및 도로노면상태에 대한 DB가 구축된다면 PM 주행환경 개선에 도움이 될 것으로 보인다. 이를 통해 본 연구에서 제안하는 HDE 검지 방법론은 추후 실시간 모니터링이 가능한 능동형 안전관리 시스템 개발에 도움이 될 것으로 기대된다.
