

서론
자율주행차량 환경에서의 온톨로지 도입
선행연구 검토
1. 기존 교통혼잡비용 산출 방법론 검토
2. 자율주행차량 및 온톨로지 관련 연구
온톨로지 설계
1. 온톨로지 기반 교통혼잡비용 분석 방법론
2. Semantic Layer 설계
3. Kinetic Layer 구현
4. Dynamic Layer 구현
결론 및 시사점
1. 실증분석 결과
2. 시사점
서론
최근 들어 AI 기술의 발전과 함께 미국의 빅데이터 분석 기업인 ‘팔란티어’가 급부상하고 있다. ‘팔란티어’의 핵심기술은 온톨로지(Ontology)이다. 온톨로지는 사물의 본질, 존재의 근본 원리를 사유나 직관을 통해 탐구하는 형이상학(Metaphysics)의 한 분야인 존재론을 기반으로 실재(reality)에 대한 정확한 이해를 추구하는 철학에서 유래한다(Lee, 2025). 컴퓨터 공학 측면에서 스탠포드 대학의 Gruber(1992)는 ‘일반적으로 개념화된 것을 형식적으로 명백하게 기술하는 명세(an explicit formal specification of a shared conceptualization)’라고 정의하였다. 이렇게 전통적으로 존재해 온 온톨로지가 AI 기술과 접목되면서 다시 재조명되고 있다. 온톨로지는 인공지능(AI), 시맨틱웹(Semantic web), 자연어 처리(NLP: Natural Language Processing), 문헌정보학 등 여러 분야에서 지식 처리, 공유, 재사용 등에 활용된다(Dictionary of Information & Communication Terminology, 2025). 특정 도메인의 개념, 속성, 관계 등을 체계적으로 정의한 지식 표현 모델이라는 개념에서 과거에는 일일이 데이터의 속성과 관계를 규정하는 데 한계가 있었으나 최근에 머신러닝과 자연어 처리(NLP), 지식그래프(Knowledge Graph) 등을 활용해 자동으로 온톨로지를 생성하거나 확장하는 것이 가능해졌다. 이를 통해 AI가 데이터를 더욱 효율적으로 활용하고, 복잡한 문제를 해결하는 추론 능력을 강화하도록 돕고 있다.
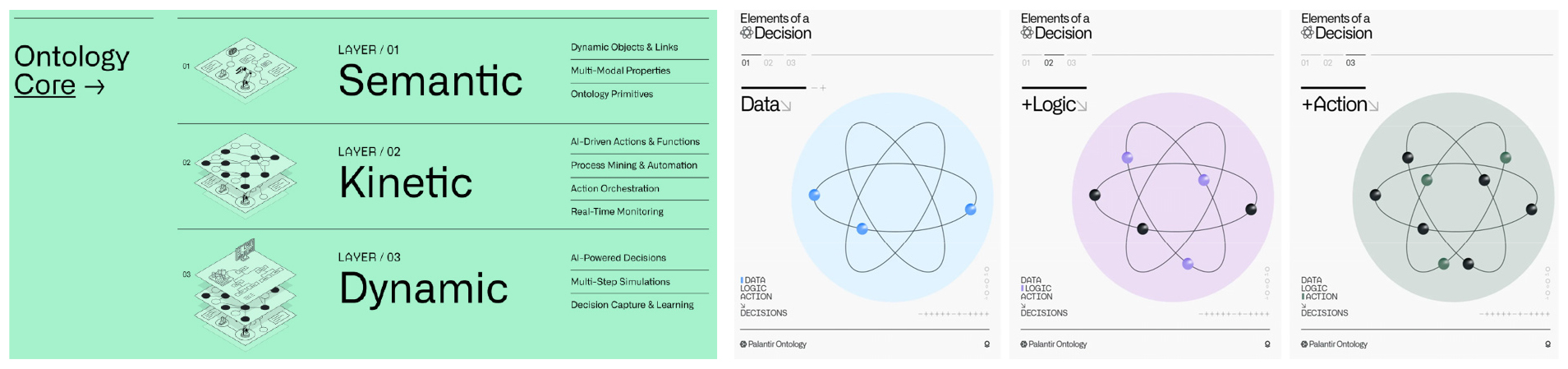
특히 ‘팔란티어’에서는 온톨로지를 Figure 1과 같이 Semantic, Kinetic, Dynamic Layer의 총 3개 층으로 구성한다. Semantic 레이어는 논리적 추상화 계층으로 개체(entity) 또는 데이터가 무엇이며 어떻게 연관되어 있는지를 분석한다. Kinetic 레이어는 실행 및 동작 계층으로 데이터가 모델에 매핑되는 방식을 결정한다. Dynamic 레이어는 개체의 동작 및 상호작용 방식을 예측하고 시뮬레이션하는 계층으로 디지털 트윈(Digital Twin)을 포함한다. 이렇듯 과거의 개체 및 데이터, 속성 간의 관계 설정 및 의미 부여를 넘어 데이터를 분석해 실행방식을 결정하고, 예측 및 시뮬레이션하는 데까지 온톨로지의 개념을 확장함으로써 효율적인 의사결정을 지원하고 있다.
자율주행차량 환경에서의 온톨로지 도입
교통분야에서도 다양한 AI 기법들이 적용되고 있다. AI 기반 자율주행 시스템은 가장 대표적인 교통 혁신 분야이며, 도시교통의 흐름을 개선하고 신호체계 및 교통관리를 최적화하기 위해 AI가 적극적으로 도입되고 있다. 자율주행차량은 차량 간 일정한 속도와 거리를 유지하여 교통흐름을 최적화할 수 있다. 불규칙하게 가속하고 제동하는 경향이 있는 사람과 달리 자율주행차는 서로 통신하여 움직임을 원활하게 조정할 수 있으며, 이는 사람의 행동으로 인해 발생하는 “유령 교통정체(phantom traffic jams)”를 줄이고 도로 공간을 보다 효율적으로 사용할 수 있게 해준다(Bayen, 2021). 또한, 자율주행차는 갑작스러운 정체의 주요 원인인 교통사고를 획기적으로 줄일 수 있는 잠재력을 가지고 있다. 사고가 적다는 것은 예상치 못한 도로 폐쇄나 교통정체가 줄어든다는 것을 의미한다. AI가 탑재된 자율주행차는 실시간 교통데이터를 분석하고 최적의 경로를 선택하여 혼잡한 지역을 피할 수도 있다(Lee, 2023). 도로망 전반에 걸쳐 교통량을 보다 균일하게 분산함으로써 병목 현상을 방지하고 전반적인 교통혼잡을 줄이는 데 도움이 된다.
이러한 자율주행차량의 효과를 극대화하려면 자율주행차량을 더 광범위한 교통관리시스템에 통합하여야 한다(Salter, 2024). AI가 접목된 자율주행차는 서로 통신할 수 있을 뿐만 아니라 신호등과 같은 도로 인프라와도 통신이 가능(V2X)한 장점이 있다. 이로 인해 센서기반 원천 데이터, 라이다(LiDAR) 데이터, 위치 및 경로 데이터, 도로환경 데이터 등 수많은 데이터의 수집 및 공유가 가능하다. 이를 AI·빅데이터·지능형 교통체계(ITS)를 정확하고 일관되게 연결하기 위한 핵심 기반기술인 온톨로지로 통합하고 서로 연계하며, 현실 세계에서 반영 가능한 시뮬레이션 체계(디지털 트윈 등)와 연동시킴으로써 더욱 큰 시너지(synergy) 효과를 기대할 수 있다. 온톨로지는 교통분야의 개념들을 공통의 컴퓨팅 언어로 정의하고, 데이터 간 의미적 연결을 가능하게 하는 구조를 제공한다. 이를 활용해 도시 전체 도로 네트워크의 전반적인 교통흐름을 최적화하고 교통혼잡비용을 감소시킬 수 있는 방법을 모색한다면 교통분야에서의 활용성 및 기대 효과가 매우 클 것으로 예상된다.
선행연구 검토
1. 기존 교통혼잡비용 산출 방법론 검토
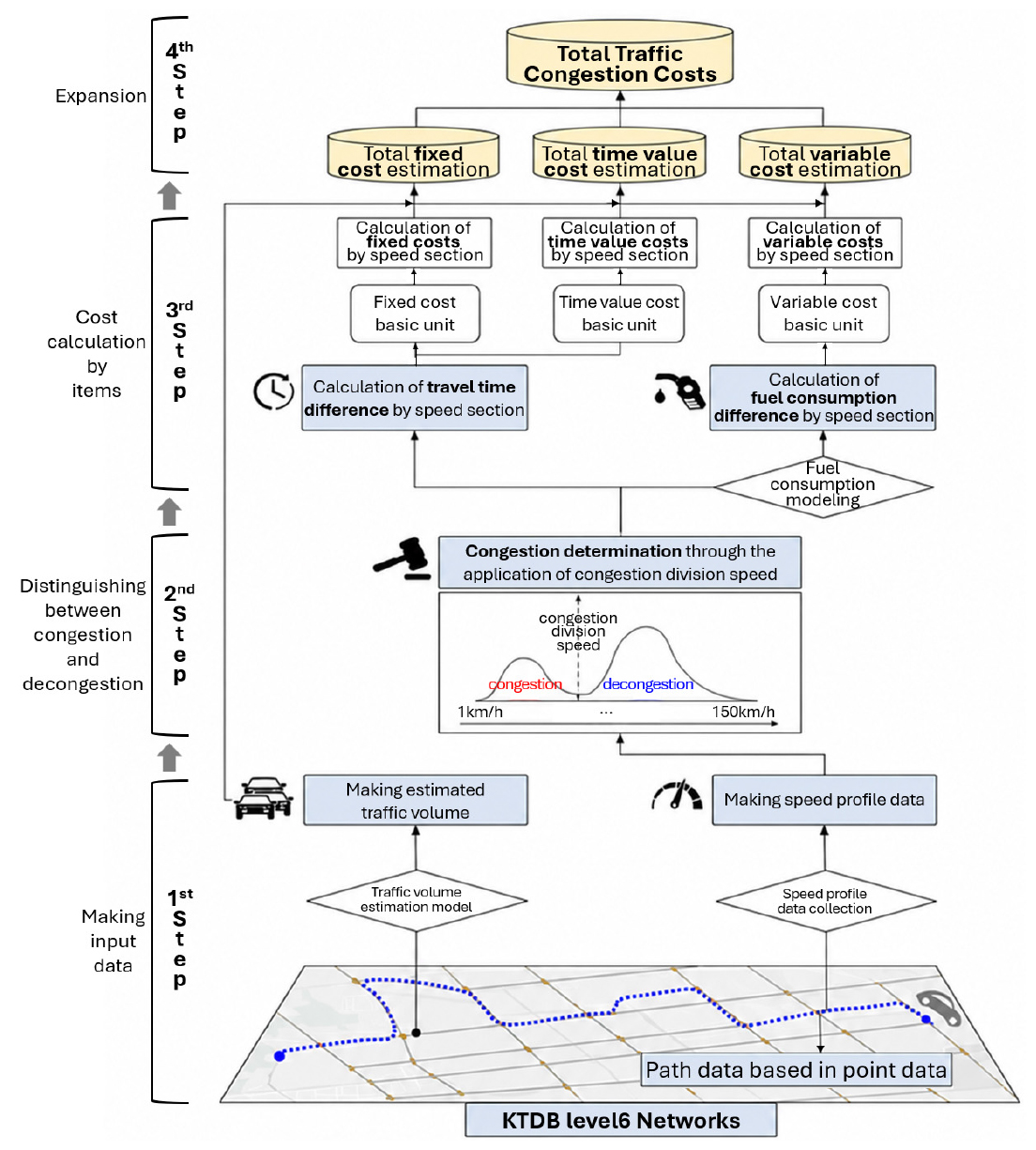
국내의 교통혼잡비용 관련 연구로 Cho(2013)는 도로교통 혼잡비용을 지역간 도로와 도시부 도로로 구분하여 추정하였다. 지역간 도로의 경우, 전국 도로 교통량 통계연보와 교통량지체함수(VDF)를 활용하였고, 도시부 도로는 해당 도시내에서 수집된 교통량 및 속도자료를 활용하였다. 사용된 방법론은 1시간 단위의 평균통행속도와 교통량 자료를 이용해 고정비, 변동비(유류비), 시간가치비용에 대한 교통혼잡비를 추정하였다. 그러나 여기서 지역간 도로는 취득할 수 있는 데이터의 부재로 BPR모형식을 활용해 추정하였다. 이로 인해 실제 속도보다 과다 추정되는 경향이 있고 방향별, 세부 구간별 등 세부적인 교통혼잡비용 추정이 어렵다는 한계가 있었다. Kim et al.(2019)은 Cho(2013)에서 사용된 평균통행속도 기반 혼잡비용의 한계를 극복하기 위해 현대엠엔소프트사에서 제공하는 내비게이션 데이터(개별차량 데이터)를 이용해 교통혼잡비용을 추정하였다. 연구 결과 단속류 구간에서는 속도가 과소추정되는 경우가 발생한다는 점을 지적하였다. 그러나 내비게이션 속도 데이터는 승용차, 버스, 트럭이 모두 동일한 속도 분포를 보인다고 가정하고 있어 차종 구분이 어렵다는 점에서 한계가 존재하였다. 이러한 차종 구분의 한계를 극복하기 위해 Cheon et al.(2024)은 한국교통안전공단에서 수집하는 영업용 차량운행기록계(DTG) 데이터를 활용해 차종 구분의 문제를 해결하였고, 이를 통해서 보다 정밀한 혼잡비용을 추정할 수 있게 되었다. 구체적인 추정 절차는 Figure 2와 같다.
2. 자율주행차량 및 온톨로지 관련 연구
앞서 살펴본 바와 같이 기존의 교통혼잡비용 산출 방법은 실제 차량운행정보 수집의 한계로 인해 추정과정에 모형식을 사용함으로 오차가 발생할 수 있고, 상당한 분석 기간이 소요되어 실시간 추정이 불가능하다. Austroads (2022) 리포트에 따르면 2046년에 전체 자동차의 판매량 중 50% 이상이 레벨 3 이상의 자율주행 시스템이 탑재된 자동차가 판매될 것으로 전망하고 있어, 자율주행차량 및 지능형교통체계에서 수집되는 수많은 데이터를 활용하면 기존에 비해 더욱 정확하게 실시간으로 산출할 수 있을 것으로 예상된다. 또한, 부가적으로 고도화된 자율주행 기술이 특정 구간에서 교통흐름과 안전성을 크게 개선할 수 있다고 본다. Obaid et al.(2021)은 도시교통 시스템에 대한 전 세계적 수요가 증가함에 따라 혼잡 및 시간 지연, 환경 오염을 줄이기 위해서 보다 제한적인 조치와 정책이 필요하다고 주장했다. 그러기 위해서는 거시적 수준에서 자율주행차량이 도로 혼잡에 미치는 영향을 예상하고 연구해야 한다고 강조하고 있다.
이를 위해 자율주행차량의 기술발전 및 보급확산과 연계된 온톨로지 기술을 적용하고 있으며, 사례로는 Fernandez et al.(2016)이 수행한 도로네트워크 센서를 이용해 획득한 교통데이터와 기상데이터를 통합한 온톨로지를 실시간 교통신호 조정에 활용한 사례를 들 수 있다. 운전자의 편의성 및 안전성 개선을 목표로 교통혼잡과 날씨 조건 등을 고려해 신호등 지속시간을 자동으로 조정하는 시스템을 개발하였다. 유럽연합(EU)에서 수행한 프로젝트 중 “VRA (Vehicle and Road Automation) Ontology”에서는 교통 인프라 및 차량 자동화와 관련된 정보를 공유하고, 연구 협업을 위한 온톨로지 시스템을 개발하였다. 자율주행, 스마트 인프라, 법적 규제 등과 관련된 내용을 공통의 온톨로지로 정리하여 정책 설계 및 연구 협업에 활용하였다(European Commission, 2017). Westhofen et al.(2022)은 온톨로지가 자율주행차량 환경에서 중요한 요소들을 모델링하고, 추론하는데 강력한 도구임을 입증하였다. 이를 위해 6-Layer Model을 활용하여 환경적 맥락의 형식적 표현을 구축하였다. 6-Layer Model은 온톨로지를 단계적으로 구조화한 개념적 프레임워크로 도메인의 용어 정의, 개념 계층화, 의미 관계 확장, 개념 모델링, 형식적 표현, 시스템 적용까지 총 여섯 개의 계층으로 구분하여 체계적으로 구성하는 표현방식이다. 이렇듯 다양한 장점이 있는 온톨로지 기술을 적용하면 기존의 교통혼잡비용 산출 방법에 비해 자율주행차량 및 지능형교통체계에서 각종 데이터를 실시간으로 수집하여 다양한 분석 결과를 도출할 수 있고, 나아가 AI 컨시어지를 통한 정책 결정에까지 활용할 수 있는 장점이 있어 이를 적용하여 본 연구를 수행하였다.
온톨로지 설계
1. 온톨로지 기반 교통혼잡비용 분석 방법론
본 연구는 자율주행차 운행환경에서 발생하는 다양한 교통관련 빅데이터를 온톨로지 기반으로 통합하여, 교통혼잡비용을 정량적으로 산출하고 혼잡감소 효과를 분석하는 시스템을 구축하는 것을 목표로 한다. 이를 위해 팔란티어(Palantir)가 제시한 시맨틱(Semantic)–키네틱(Kinetic)–다이내믹 레이어(Dynamic Layer) 구조를 적용하였다. 전체적인 구조는 Figure 3과 같으며, 상호 순환적인 피드백 루프(feedback-loop) 구조를 가진다.
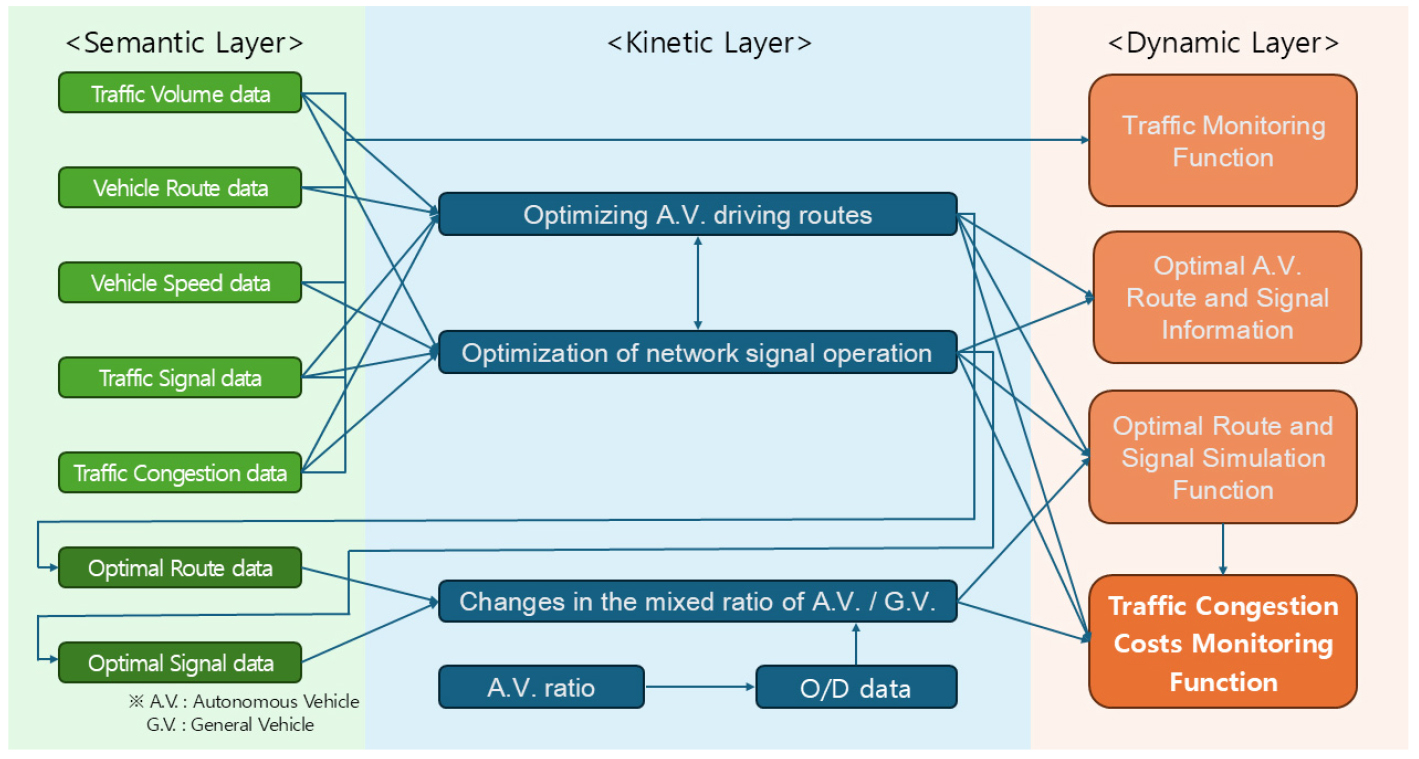
Semantic 레이어는 자율주행 환경에서 개체·속성·관계의 개념적 구조를 정의하고, Kinetic 레이어는 이러한 개념이 실제 데이터에 어떻게 매핑되고 실행되는지를 기술하며, Dynamic 레이어는 자율주행차량의 경로, 속도, 신호체계 등의 변화를 모니터링하여 혼잡비용 변화를 예측한다. 이 3단계 프레임워크는 기존의 정적인 교통데이터 분석을 넘어 실시간 데이터 기반의 지능적 인프라 제어를 가능하게 하며, 도시 전체 교통시스템의 예측 및 의사결정을 지원하는 확장형 구조를 제공한다. 온톨로지 설계를 위해 무료 오픈소스 온톨로지 편집기인 ‘Protégé’ 프로그램을 사용하였다. 이를 통해 교통량, 속도, 신호운영, 차량소통 및 최적경로 등의 데이터를 구조화하고 시스템 간 데이터 흐름 및 의사결정 규칙을 체계적으로 정의하였다.
2. Semantic Layer 설계
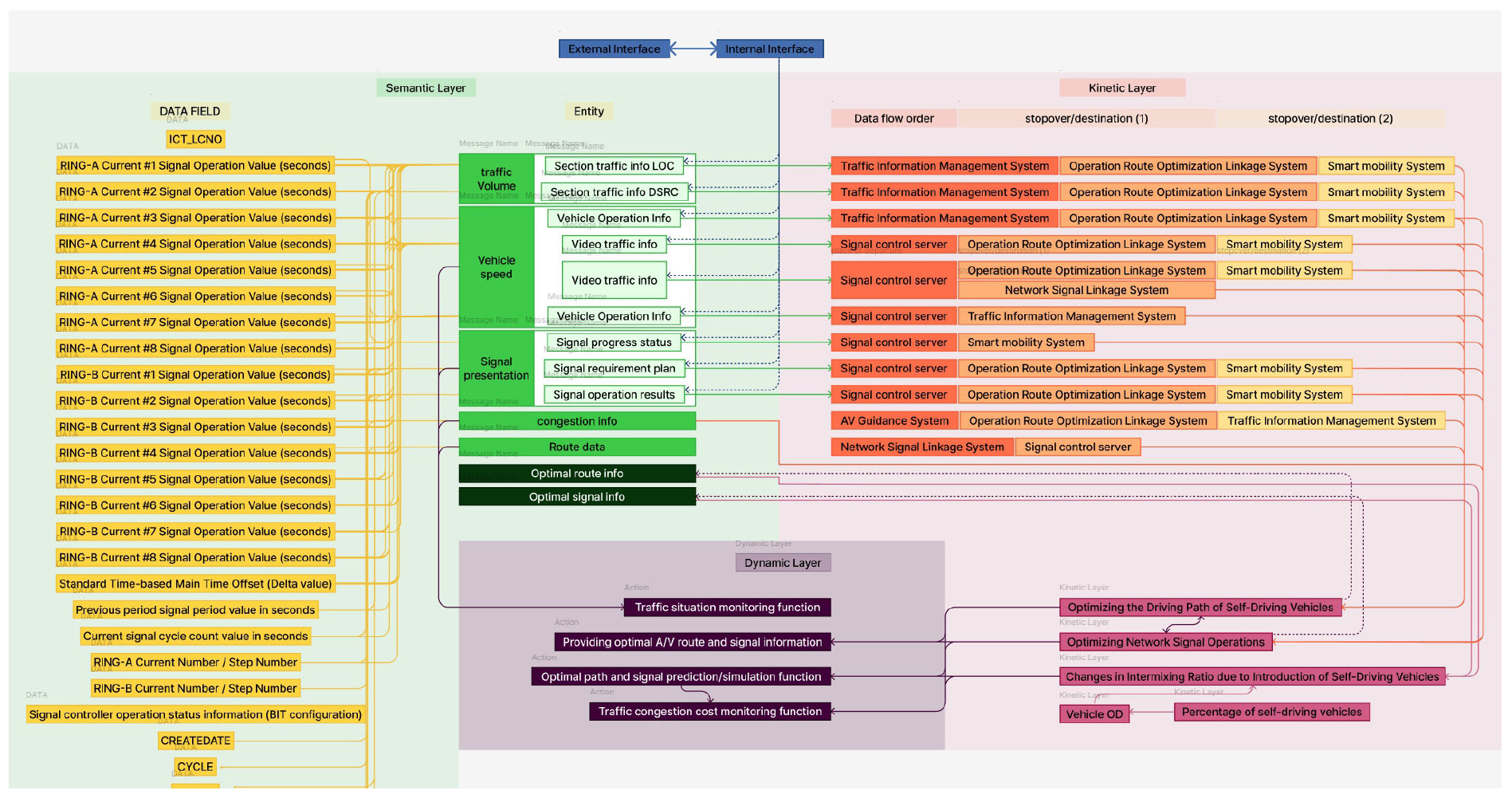
Semantic 레이어는 자율주행차량 환경에서 수집되는 다양한 데이터를 활용해 교통혼잡비용을 산출하기 위해 각 데이터 개체(Entity)를 정의하고 속성(Property)을 Table 1과 같이 규정하였다. 활용가능한 데이터는 크게 교통량, 차량의 통행속도, 교통인프라 중 신호운영정보, 차량소통정보, 최적경로 및 신호운영 데이터로 분류하였다. 본 연구에서는 경찰청 자율주행기술개발혁신사업 테스트베드로 선정된 시흥시 배곧지구에 구축된 시범지구의 데이터를 수집하여 데이터셋을 구축하였다. 데이터는 총 12종류이며 각 데이터를 개체로 지정하였다. 먼저 기존의 교통혼잡비용 추정에도 활용되는 교통량을 구축하기 위해 검지기 데이터 중 5분간의 가로구간 교통량과 150초 단위의 교차로 방향별 교통량 데이터를 활용하였다. 차량 속도 프로파일은 영상검지기(CCTV)를 통해 추출한 각종 영상데이터를 활용해 속도를 추정하였다. 또한, 자율주행시범차량에 부착된 단말기(OBU, On-Board Unit)에 설치된 App을 활용하여 경로정보를 추출함으로써 교통량과 속도정보를 추정하는데 검증 및 활용하였다. 여기에 현재 네트워크상의 실시간 신호운영 정보 및 App을 통해 산출된 실시간 최적경로 및 신호운영 데이터 등을 부가적으로 활용하여 보다 효율적으로 혼잡통행비용을 추정하였다. 각 데이터 필드와 개체 간의 관계는 Figure 4와 같다.
Table 1.
List of raw data & entities
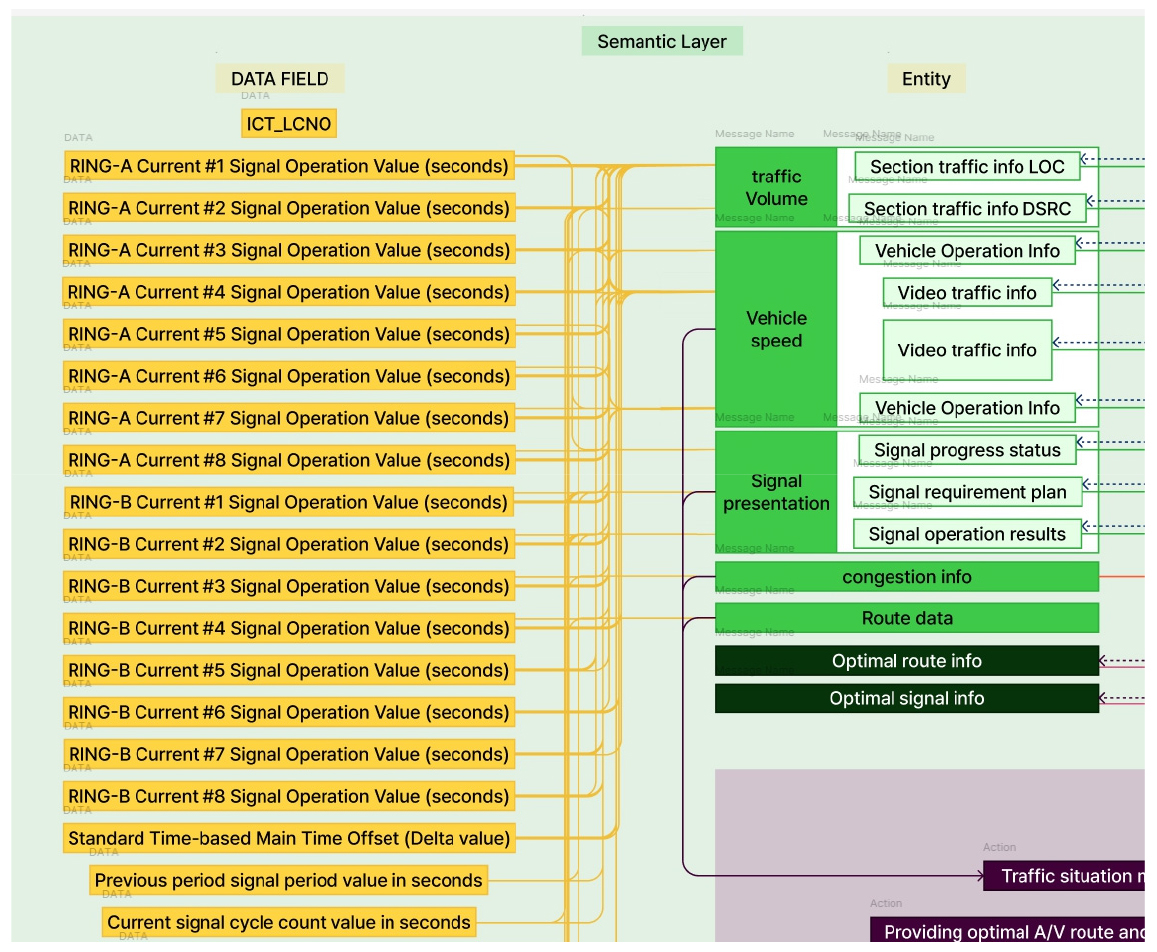
다음으로 위에서 제시한 데이터 개체 간 속성을 Figure 5와 같이 체계적으로 구조화하였다. 속성은 개체의 정적·동적 특성을 정의하며, 본 연구에서는 12개의 개체 간 메시지 번호·명칭, 데이터 흐름 순서(출발·경유·목적지), 통신주기(초 단위·신호주기·이벤트 등)와 같은 속성을 연계하여 교통 네트워크 내 의미 기반 추론이 가능한 시멘틱 구조를 구축했다. 각 데이터 개체의 하위 필드(field)에는 교차로 번호, 링크별 신호현시, 주기, 옵셋, 초기대기 대수, 초기대기 길이, 평균이동류속도, 구간통행시간 등 다양한 교통정보가 실시간으로 수집되는 구조이다.
3. Kinetic Layer 구현
Kinetic 레이어는 Semantic 레이어에서 정의된 개체 및 개념을 실제 데이터와 연결하고, 시스템 동작의 방법 및 논리(logic)를 규정하는 단계이다. 팔란티어의 온톨로지 모델에서 정의하는 실행·자동화 기능이 이 단계에서 구현된다. 기존의 ERD(Entity Relationship Diagram)가 주로 정적 구조를 정의하는 반면, Kinetic 레이어는 데이터의 실제 동작 규칙과 처리 로직까지 규정해 실시간 운영·자동화를 지원한다. 각종 데이터를 활용해 도로네트워크 상의 교통혼잡비용을 자동으로 산출하기 위해 먼저 다음과 같은 로직을 적용하였다. 네트워크 내 총혼잡비용은 Equation 1과 같이 일반차량과 자율주행차량의 혼잡비용을 합산하여 산출하였다.
여기서,
혼잡비용은 국가 교통정책 평가지표 조사사업(Cheon et al., 2024)에 제시된 방법론을 간소화하여 Equation 2와 같이 통행시간가치 기반 방법론을 적용하였다. 혼잡경계속도의 개념을 적용하여 도로 링크별 기준운행시간()을 산정하고 실제 평균차량운행시간()과의 차이를 이용하여 교통혼잡으로 인한 손실을 산출하였다. 기준운행시간은 링크 혼잡경계속도를 적용하여 환산하였으며, 도시부도로의 혼잡경계속도는 27km/h(서비스수준 “D”)를 기준으로 적용하였다. 통행시간가치(,)는 경기도 교통수단 통행시간가치 산정 연구(Kim, 2023)에서 제시한 승용차 1대당 평균 32,725원/시간(9.0903원/초)를 적용하였다. 본 연구에서는 자율주행차량의 도입 및 확산이 현실적으로 가장 빠를 것으로 예상되는 승용차에 대해 한정하여 실험하였다.
여기서,
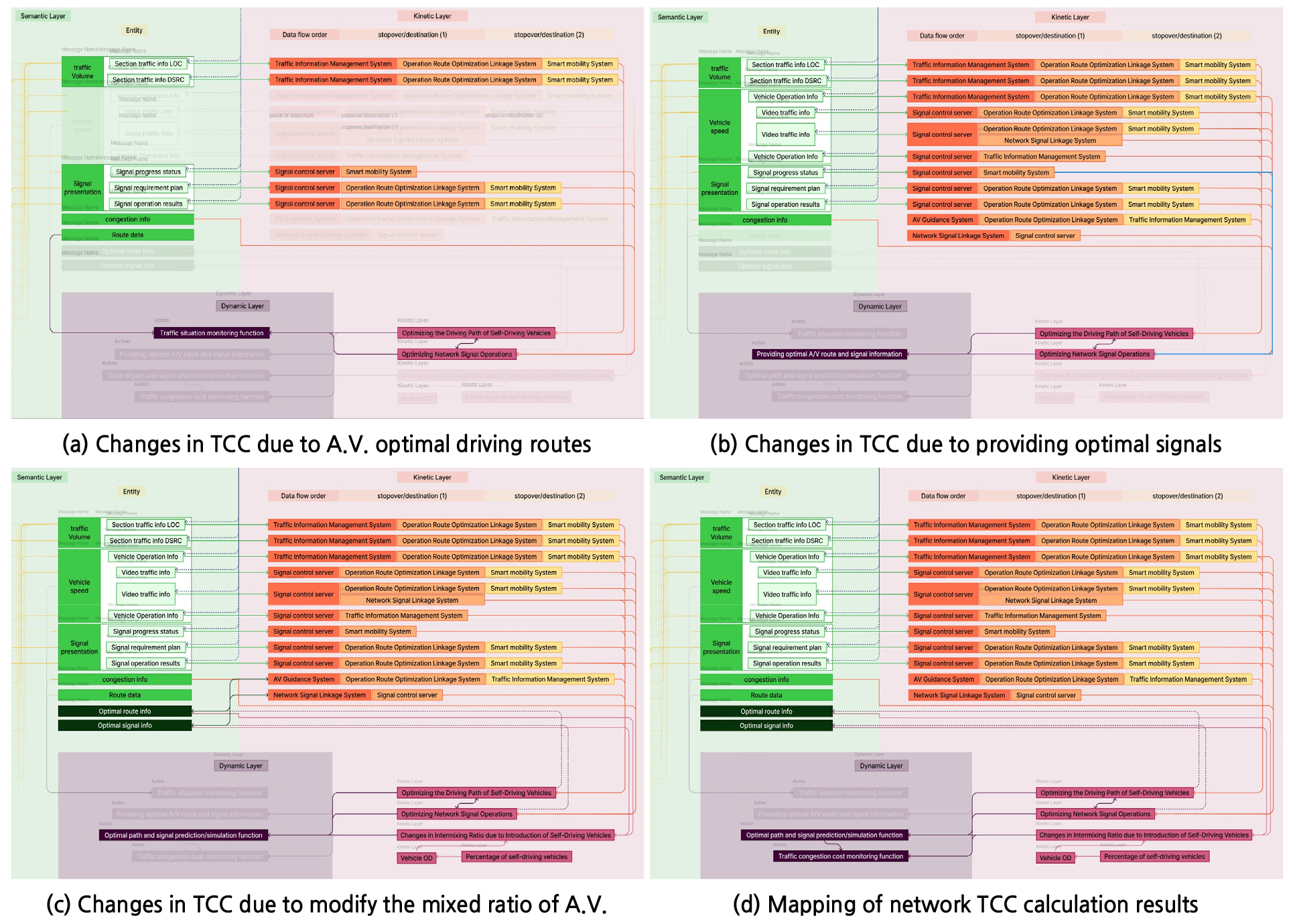
실제 상황에 다이나믹하게 작동할 수 있는 로직을 개발하기 위해 다음과 같은 시나리오를 가정하였다. 먼저 교통량 및 통행속도와 신호운영 정보를 이용하여 자율주행차량의 주행경로를 최적화할 경우와 신호운영 최적화에 따른 최적신호 제공시의 혼잡통행비용 변화를 분석하기 위한 로직을 개발하였다. 또한, 향후 점진적으로 자율주행차량이 도입됨에 따라 일반도로에 자율주행차량의 혼입비율이 변화될 경우도 가정하였다.
a. 자율주행차량 주행경로 최적화에 따른 경로 변화시
b. 최적신호 제공에 따른 신호운영 변화시
c. 자율주행차량 도입에 따른 혼입비율 변화시
a. 자율주행차량의 주행경로 최적화시에는 현재의 교통량 데이터, 과거의 운행경로 이력 데이터, 신호운영 데이터, 차량정체구간정보 등을 활용하여 최적경로를 설정하고 그에 따른 링크별 교통량 및 통행속도의 변화를 파악하여 혼잡통행비용(TCC)을 산출한다. b. 최적신호 제공에 따른 신호운영 변화시에는 현재의 교통량 데이터, 구간별 속도데이터, 신호운영 데이터, 차량정체구간정보 등을 활용하여 최적경로 변화에 따른 최적신호를 산출하고 그에 따른 링크별 교통량 및 통행속도의 변화를 파악하여 혼잡통행비용을 산출한다. 이 과정에서 최적경로와 최적신호는 상호 순환적인 피드백 루프(feedback-loop) 과정을 통해 최적화된다. c. 자율주행차량 도입에 따른 혼입비율 변화시에는 전체 네트워크 상의 자율주행 차량비율을 변수로 설정하여 OD를 생성하고, 그에 따라 산출된 최적경로정보와 최적신호운영 정보를 활용하여 혼잡통행비용을 산출한다. 각 시나리오별 온톨로지 구성은 Figure 6과 같다. 자율주행차량 도입으로 인한 혼입비율은 현재 경찰청 자율주행기술개발혁신사업에서 수집된 시험차량(Test vehicle)의 통행 데이터를 기반으로 활용하였으나, 아직 많은 데이터가 수집되지 않아 10% 단위로 임의로 설정하도록 개발하였다. 이에 따라 시범지구 4×4 네트워크 상에서 자율주행차량의 OD가 기존 시험차량의 주요 이동경로 및 통행특성을 기반으로 자동 생성(Generating)되도록 하여 실험을 진행하였다. 앞의 시나리오별 산출된 혼잡비용을 Figure 6(d)와 같이 Dynamic 레이어에 매핑(mapping)하여 최종 시스템을 구현하였다.
4. Dynamic Layer 구현
Dynamic 레이어는 개체의 동작 및 상호작용 방식을 예측하고 시뮬레이션하는 계층으로 여러 가지 기능의 구현이 필요하다. 앞서 분석한 내용을 바탕으로 Figure 7과 같이 스마트모빌리티 관제시스템을 웹상에 개발하여 필요기능을 구현하였다. 구축의 대상 범위는 경찰청 자율주행기술개발혁신사업 테스트베드로 선정된 시흥시 배곧지구 내 정왕대로를 포함한 4×4 도로 네트워크를 대상으로 하였다. 총 35개의 신호교차로를 포함하고 있으며, 실증 데이터가 수집되기 시작한 2025년 6월부터의 데이터를 사용해 시스템을 구축하고 분석하였다.
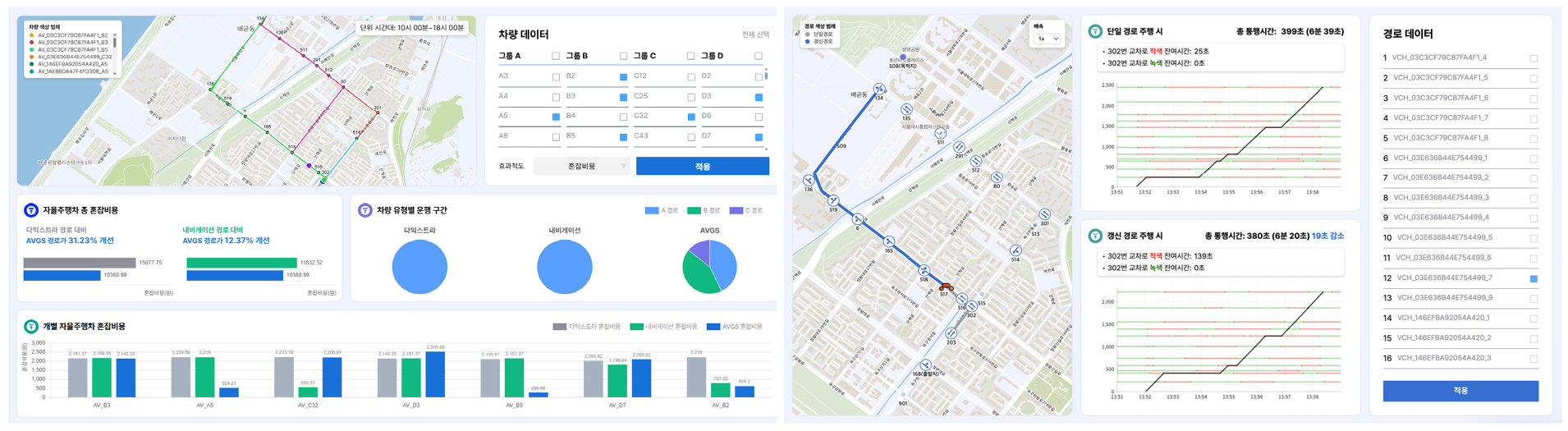
주된 기능으로는 교통소통상황 모니터링, 최적 자율주행차량 경로 및 신호정보 제공, 최적경로 및 신호 예측/시뮬레이션, 교통혼잡비용 모니터링 등이 있다. Kinetic 레이어에서 구축한 자율주행차량 경로 및 신호운영 최적화, 자율주행차량 도입에 따른 혼입비율 변화분석 로직에 따라 산출된 결과를 활용하여 최적경로 및 신호를 예측하고 시뮬레이션하는 기능을 이용해 다양한 상황의 교통혼잡비용을 산출하고 모니터링하는 기능을 구현하였다. 부가적으로 개별 자율주행차량의 다익스트라(Dijkstra) 알고리즘 기반 최단거리 경로와 링크별 교통량 및 차량혼잡, 신호운영 데이터 등을 고려한 최적경로 정보를 제공하는 메인화면이 있다. 두 가지 경로를 비교하여 보여주고 경로에 따른 링크별 통행시간, 교통량 등을 예측 및 시뮬레이션하고 교통혼잡비용을 산출하여 비교·분석할 수 있게 시각화하였다. 이 과정에서 산출된 개별 자율주행차량 및 네트워크 전체의 단위시간별 차량통행시간, 구간별 자율주행차량 점유율 등의 정보를 제공한다. 신호운영 측면에서는 주변의 실시간 신호운영 현황 및 최적신호 현시 정보를 제공하고, 신호운영 대안에 따른 실시간 시공도를 제공함으로써 신호 시뮬레이션이 가능하도록 구현하였다.
결론 및 시사점
1. 실증분석 결과
온톨로지 기반의 스마트모빌리티 관제시스템에 탑재된 자율주행 안내시스템(AVGS, Autonomous Vehicle Guidance System)을 활용하여 실증 효과분석을 수행하였다. 실증 방법은 Figure 8(a)와 같이 시흥시 테스트베드 내에 기점(168, 시화병원 사거리)과 종점(508, 시흥아트센터앞)까지의 최적대안 후보경로 3가지(Route A, B, C)를 설정하고 다익스트라 최단경로, 상용화 네비게이션 시스템(카카오맵)의 실시간 안내경로, AVGS 최적화 경로를 실시간으로 배정하여 시험차량을 운행하였다. 시험차량은 Table 2와 같이 총 12대를 3대씩 4개의 그룹으로 나누어 1초 간격으로 동시 출발해 총 통행시간을 측정한 후 30분 간격으로 반복하였다. 운행시간대는 오전 10시부터 오후 6시까지 하루 8시간씩 1주일 동안 시행하였다. 주행구간 내에 302(건영2차앞사거리) 교차로 및 518(영남아파트앞사거리) 교차로에 자율주행차량 경로를 반영한 실시간 신호운영을 적용하고, 교차로 진입 전에 자율주행차량의 경로를 업데이트하는 구간을 설정하였다. 자율주행차량의 운행은 현실적 여건을 고려하여 자체 개발한 어플리케이션(App)을 통해 경로를 안내하고, 사람이 대리운전하는 방법을 사용하였다.
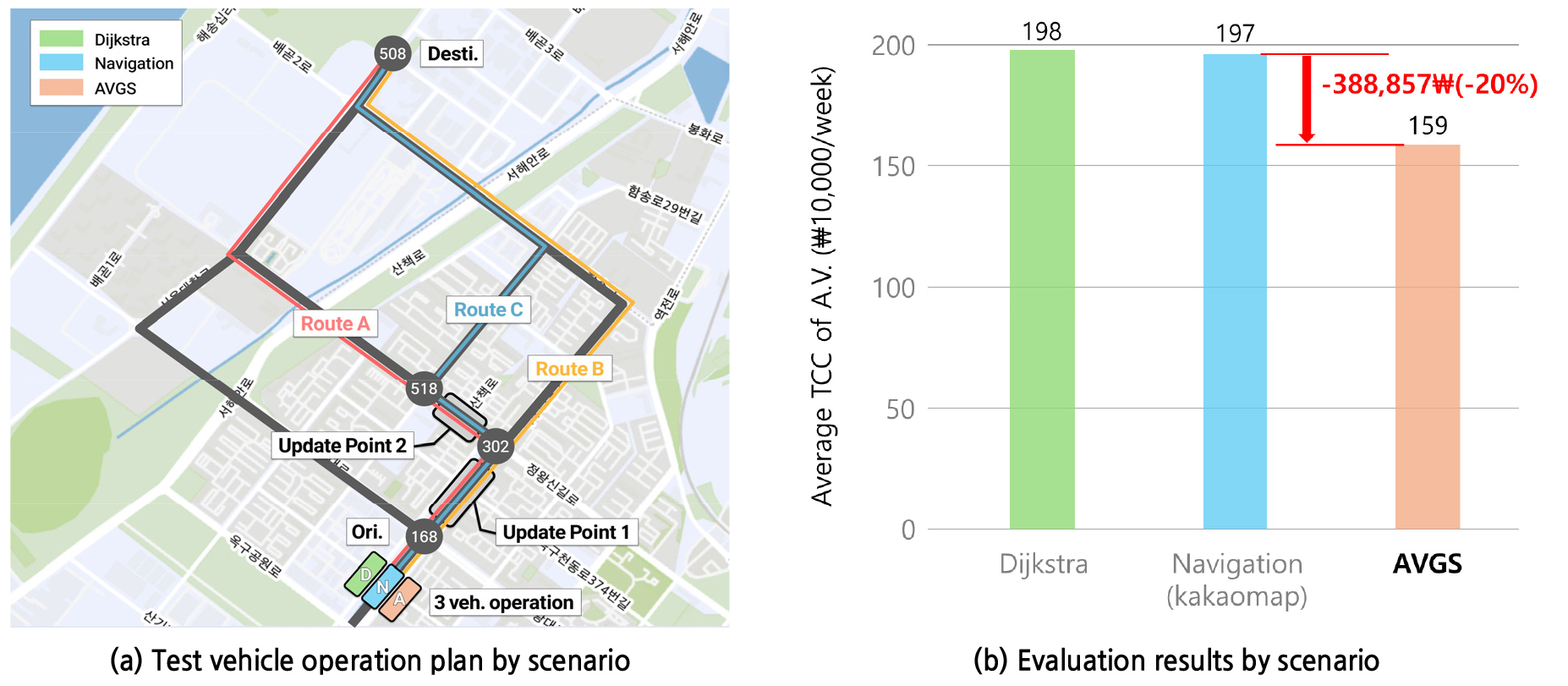
Table 2.
Example of test vehicles operation schedule

실험 결과 경로탐색 알고리즘 적용 시나리오별 교통혼잡에 의해 증가한 총 통행시간(실제 차량운행시간-기준운행시간)은 Table 3과 같이 다익스트라 최단경로 218,252초/주(61시간/주), 네비게이션 안내경로 217,250초/주(60시간/주), AVGS 최적경로 174,473초/주(48시간/주)로 집계되어 기존의 상용화된 네비게이션 경로 대비 42,777초/주(12시간/주) 감소 효과가 발생하는 것으로 분석되었다. 그에 따라 산출된 총 교통혼잡비용은 Figure 8(b)와 같이 다익스트라 최단경로 198만원/주, 네비게이션 안내경로 197만원/주, AVGS 최적경로 159만원/주로 집계되어 기존의 상용화된 네비게이션 경로 대비 약 39만원/주의 절감 효과가 발생하는 것으로 분석되었다. 실험 구간의 연장이 길지 않아 최단경로 대비 상용네비게이션 안내경로의 통행시간 절감 효과는 크지 않지만, 본 연구를 통해 제안한 AVGS는 신호운영까지 같이 제어함으로써 기존의 상용화된 네비게이션 안내경로 대비 약 20%의 절감 효과가 발생하는 것으로 분석되었다.
Table 3.
Total traffic congestion cost (TCC) calculation results by scenario
| Category |
Dijkstra (A) |
Navigation (B) |
AVGS (C) | Difference | ||
| A-C | B-C | |||||
| + Delay time | sec | 218,252 | 217,250 | 174,473 | 43,779 | 42,777 |
| hr | 61 | 60 | 48 | 12 | 12 | |
| Total TCC | ₩ | 1,983,975 | 1,974,869 | 1,586,012 | 397,963 | 388,857 |
2. 시사점
본 연구에서는 온톨로지 개념을 교통에 접목하여 기존에 단편적으로 활용되어왔던 빅데이터 간의 상관관계 및 상호작용을 바탕으로 데이터 개체 및 하위 필드를 정의하였다. 다음으로 구체적 로직 및 알고리즘을 구현하여 실시간 데이터를 활용해 지속적으로 모니터링하고 시뮬레이션할 수 있는 시스템을 구현함으로써 분석의 신뢰성 및 데이터 활용성을 향상하였다. 또한, 파편적으로 연구되어왔던 도시·교통분야 데이터 분석 및 활용 부분을 3-Layer (Semantic–Kinetic–Dynamic) 구조를 도입해 유기적으로 연계함으로써 하나의 통합적인 운영 체계로 발전시켰다. 본 시스템은 자율주행차 기반 교통운행 환경에서 발생 가능한 동적 상호작용을 정량적, 시각적으로 평가할 수 있는 분석 프레임워크를 제공한다는 점에서 의의가 크다. 시흥시에 설치된 자율주행기술개발혁신사업 테스트베드 실증결과 기존의 상용화된 네비게이션 안내경로 대비 약 20%의 교통혼잡비용 절감 효과가 나타나는 것으로 분석되었다. 이는 어디까지나 통제된 모의 네트워크상의 실험에 따른 결과로 향후 실제 교통데이터 및 시나리오 기반 검증을 확대하여 지속적으로 검증할 필요가 있다. 향후 자율주행차-신호운영 연계전략 수립 및 네트워크 수준의 교통혼잡비용 최소화 방안 마련 등의 다양한 연구로 발전할 수 있을 것으로 기대된다. 다만 본 연구는 데이터의 수집 및 분석, 활용까지의 전반적인 데이터 구조 및 흐름, 상관성에 초점을 맞추어 제시한바 개별 로직 및 알고리즘의 자세한 설명까지는 한계가 있었다. 향후 시스템에 적용된 개별 로직의 구체적인 설명 및 학술적 검증 등이 추가적으로 필요하며, 분석결과의 신뢰성을 높이기 위해 지속적인 연구가 필요하다.
