

서론
선행연구
1. 연속류
2. 단속류
방법론
1. HCM(Highway Capacity Manual) 7th 리뷰
2. Macro 시뮬레이션
3. Meso 시뮬레이션
4. Micro 시뮬레이션
5. 교통분석 프로그램 선정
사례연구
1. 데이터 수집
2. Macro 시뮬레이션 모델 개발
3. Meso 시뮬레이션 모델 개발
4. 시나리오 개발
결과
1. 지체
2. 교통량대 용량비(V/C)
결론 및 향후연구
서론
자율주행 자동차가 상용화되는 것은 먼 미래의 일이 아니다. 최근 차량에는 ADAS(Advanced Driver Assistance Systems)와 같은 첨단 운전자 보조 시스템을 통해 위험 상황 발생 시 차량을 제어하여 차량 운송 시스템 성능과 안전성을 향상시키고 있다. 자율주행 차량에는 첨단 센서와 차량 제어에 필요한 알고리즘을 사용하여 교통류의 용량을 증대시킬 것이며, 자율주행 차량과 CAV(Connected Autonomous Vehicle)는 도시의 교통체증 문제를 해결할 잠재력을 가지고 있다. Jin et al.(2018)에 따르면 자율주행이 실제 도로에 도입되면 교통 흐름을 변화시킬 것이라고 분석하였다. 자율주행차량 혼재시 교통 흐름, 안전, 연료 절감 등에 긍정적인 효과 분석 연구도 많이 이루어지고 있으나(Friedrich, 2016; Faisal et al., 2019; He et al., 2019) 실무에서 자율주행 효과를 테스트하고 분석할지에 대한 명확한 기준은 미비한 실정이다. 최근 미국 교통 연구 위원회(TRB)는 이전에 논의된 HCM(미국 도로용량편람) 6.1과 달리 TRB 2022 연례 회의에 맞춰 제7판 도로용량편람을 공식적으로 발표하였으며, 자율주행차량이 도로 용량에 미치는 영향을 포함하였다. 이에 본 연구는 HCM 7판(Transportation Research Board National Academies of Sciences et al., 2022)의 자율주행차량에 관련된 도로용량 분석에 대하여 리뷰하고 도로용량에 영향을 미치는 요인을 파악한 후 시뮬레이션을 활용하여 네트워크상에서 자율주행차량이 교통 용량에 미치는 영향을 비교 분석한다. 많은 요인들 중 교통용량에 큰 영향을 주는 자율주행차량 시장 점유율(market penetration rate, MPR), 교통량 및 중차량의 비율에 대하여 여러 시나리오를 통해 시뮬레이션 해보고 이를 통하여 앞으로 맞이하게될 자율주행차량의 시대를 대비하는데 목적이 있다.
본 논문은 다음과 같이 구성된다. 이어지는 선행연구에서는 개념적 측면에 머물러 있는 자율주행차량 도입의 다양한 기대효과를 연속류와 단속류의 측면에 중점을 두어 요약ㆍ정리한 후 자율주행 도로용량분석에 대한 시사점을 도출한다. 본론에서는 자율주행차량의 도입 효과를 위해 Macro 시뮬레이션으로부터 네트워크 환경을 설정 한 후 Meso 시뮬레이션을 활용하여 분석하고 마지막 단락에서는 분석 결과의 해석을 바탕으로 기대효과를 제시하는 것으로 논문을 마무리한다.
선행연구
모든 도로상황에서 자율주행 기능을 이용하기 위해 차량 간의 통신 기술이 중요하게 연구 되었으며, 이를 적용하기 위한 방법으로 시뮬레이션 또는 제한된 환경의 테스트베드에서 실험이 수행되었다. 이러한 실험을 통해 자율주행이 상용화되면 도로의 주행 상황이나 운전 방식이 변화될 것으로 예측된다. 자율주행 기술을 실제 도로에 적용하기 이전에 다양한 환경을 고려하여 자율주행 혼재 상황을 분석하는 것은 필수적이고 자율주행 차량이 도입되었을 때의 안전성, 도로 용량, 교통 흐름 변화 등의 예측 및 분석은 수반된다. 현 상황에서 여러 시나리오를 실제 도로에 적용하기에는 안전, 법규제, 기술 등의 여러 제약이 발생하기 때문에 시뮬레이션에서 자율주행 효과를 예측하고 분석하는 것은 합리적으로 평가되고 있다. 대부분의 자율주행 연구는 화물자동차의 효율성과 안전성 또는 고속도로로 상황에서 많은 연구가 이루어졌다. 자율주행이 상용화되면 일반도로에서 혼재 상황을 피할 수 없기 때문에 일반도로에서의 교통류를 분석하는 것 또한 중요하다. 본 연구의 목적은 도심에서 차량 혼재시 도로 용량에 미치는 결과를 분석하는데 있는 바, 자율주행 차량 도입시 도로 네트워크 측면에서 지체, 용량, 환경, 안전성에 관해 분석한 연구를 중심으로 관련 문헌 고찰을 수행한다.
1. 연속류
자율주행 차량이 혼재된 교통 흐름에 대한 분석 및 시뮬레이션 기반 조사는 네트워크 측면에서 다양한 결과를 나타낸다. 과거에는 화물차량 또는 고속도로 위주로 자율주행에 관한 연구가 이루어졌으나 최근에는 일반 차량을 대상으로 CAV 설계에 대한 실험적 검증에대한 많은 연구가 이어지고 있다. Papadoulis et al.(2019)은 고속도로 상황에서 CAV 보급률에 따라 안전성을 분석하였다. 시뮬레이션을 통해 CAV 보급률 25%, 50%, 75%, 100%에 대해 교통 충돌이 각각 12-47%, 50-80%, 82-92%, 90-94% 감소했다. CAV 보급률이 높을수록 도로 안전이 크게 향상되는 것으로 나타났다(Ye et al., 2019). 완전자율주행이 이루어지기 이전에 차량은 CAV와 기존 차량의 조합으로 구성되므로 다양한 점유율에서 CAV가 교통 안전에 미치는 영향을 조사하는 것이 필수적이다. 충돌 심각도와 빈도는 함께 교통 안전을 반영하므로 Micro시뮬레이션을 통해 충돌 심각도와 빈도에 대한 CAV의 영향을 조사했다. CAV 점유율이 증가하면 충돌 건수 대한 노출은 증가하였지만 충돌 심각도는 감소했다. CAV의 안전에 관한 개선이 CAV 점유율에 비례하지 않았으며 100% 점유율에서만 높은 안전성을 확보했다(Sinha et al., 2020).
Kopelias et al.(2020)는 자율주행 차량 및 커넥티드 차량이 도로에 혼재시 예상되는 환경에 미치는 요인을 파악하고 영향을 비교하였다. 문헌연구를 통해 차량, 사용자, 도로환경과 관련된 11가지 요소를 확인했으며, 환경적인 측면에서 CO2 배출량의 감소는 7-94%, GHG 배출량의 감소는 5-60% 범위 내에서의 개선되었으며, 환경에 가장 영향받는 것으로 보이는 연료소비의 감소는 30-90%였다.
교통 용량측면에서 대부분의 연구는 자율주행 차량의 점유율에따라 용량증대 효과를 나타낸다. Talebpour et al.(2016)은 연속류에서 시장 점유율이 증가함에 따라 교통 흐름의 안정성 및 용량을 분석하였다. 시장 점유율이 높을 때 자율주행 차량의 교통 흐름 개선률보다 커넥티드차량의 교통 흐름 개선률이 높게 나타났다. 자율주행 및 커넥티드차량의 점유율이 낮은경우에는 용량이 선형적으로 증가하였다. Jiang et al.(2021)은 CAV의 점유율에따라 고속도로에서 혼합 교통 흐름의 특성을 분석하였다. 최대 혼잡 감소 비율은 63.36%에 달했으며, HDV(Human-driven vehicle)으로 이루어졌을 때에 비해 CAV로만 이루어진 환경에서 도로용량이 3.24배 증가했다. 자율주행 차량의 점유율이 100%일 때 교통 흐름은 교통 밀도에 선형적으로 증가하고 평균 속도는 최고 속도와 같다. CAV의 점유율에 따라 도로에 상당한 영향을 미치며, CAV 점유율의 증가로 도로 용량이 향상되었다는 결론을 도출했다. Kim et al.(2021)은 자율주행이 혼재된 상황에서 혼합교통류의 특성을 분석하기위해 전용차로의 유무에 따른 3가지의 상황을 제시하였다. 도로의 합류부와 분류부에서는 전용차로 도입 시 MPR과 LOS(Level of Service)가 증가할수록 지체가 증가하였으며 MPR이 낮은 10-20% 구간에서는 전용차로 도입 시 전용차로 이외 나머지 차로가 과포화되는 현상이 발생하였다. MPR에 따른 전용차로 도입에 따른 악영향은 LOS D-E, MPR 10-20% 구간에서 가장 두드러지게 나타났으며 군집주행을 하지 않는 시나리오에서 이동성이 가장 좋게 분석되었다.
2. 단속류
앞선 연구는 신호가 없는 가상의 도로 또는 고속도로 구간에서 분석이 이루어졌다. 완전 자율주행을 시뮬레이션하기 위해서 신호가 있는 구간 또는 네트워크 관점에서 분석하는 것은 필수적이다. Virdi et al.(2019)에 따르면 CAV의 점유율에 따른 안전성을 분석하였다. CAV는 10% 단위로 혼합 교통을 만들었으며 낮은 비율의 CAV가 신호 교차로에서 충돌을 증가시켰지만 우선 순위를 제어한 교차로에서는 충돌을 감소시켰다. CAV의 초기 20%만이 도로에 혼재되었을 때 신호, 우선 순위, 원형 교차로 및 DDI(Diverging Diamond Interchange) 교차로에서 각각 +22%, -87%, -62% 및 +33%의 충돌 변화를 일으켰다. 높은 점유율의 CAV는 사고를 획기적으로 감소시켰다. 90%의 CAV 점유는 신호, 우선 순위, 원형 교차로 및 DDI교차로에서 각각 -48%, -100%, -98% 및 -81%의 충돌 변화를 동반했다. Jin et al.(2022)는 일반적인 상황뿐만아니라 안좋은 기상상황을 가정하여 센서의 인지 범위와 자율주행 차량의 MPR에 따라 안전성을 분석하였다. 센서의 인지 범위가 25m 이하일 때, 급감속 횟수는 최대 10배 이상, 사고 발생 횟수는 최대 5배 이상 증가하는 것으로 나타났다. 센서의 인지 범위가 낮고 MPR이 높을수록 위험도가 높아지는 것으로 나타났다.
Jiang et al.(2017)는 부분적인 연결 및 자율주행차량 환경에서 독립 신호 교차로를 위한 시스템을 제안하였다. 제안된 시스템을 통해 분석한 결과 연료 소비 감소는 2.02%에서 58.01%였으며, CO2 배출 감소는 1.97%에서 33.26%의 범위로 나타났다. 모든 시나리오에서 CAV차량의 도입으로 인한 환경에 부정적인 결과는 도출되지 않았다. Yao(2020)는 독립 교차로에서 연결된 자동 차량과 혼합된 교통 흐름이 휘발유 소비와 운송 배출에 미치는 영향을 연구하였다. 시뮬레이션을 통해 자율주행 자동차의 혼재 상황시 휘발유 소비, CO2 배출 및 차량 지체 감소를 분석하였다. 결과로 자율주행차 보급률 100%에서 각각 22.36%, 18.61%, 57.21% 감소했으며, 환경에 긍정적인 영향을 미치는 것으로 분석되었다.
Wu et al.(2022)은 교차로에서 자율주행 차량 혼재시에 대한 영향을 분석하고 결론을 확증하기 시뮬레이션을 활용하여 검증했다. CAV점유율이 높아질수록 교차로의 용량은 증가했다. CAV이 교차로에 긍정적인 영향을 미치기 위해서는 군집 의지가 해당 범위 내에서 제어되어야 하며, 이는 CAV-HV(human-driven vehicles) 혼합 교통 흐름에 대한 교차로 관리를 업데이트할 때 CAV 점유율과 군집 의지를 함께 고려해야 함을 시사했다.
위에 언급된 혼재 상황에 대한 연구가 고속도로 또는 임의의 구간으로 이루어져 있고, 외국에서는 연속류에 대한 혼재시 용량분석을 하고 있으나 국내에서는 아직까지 선행된 연구가 없다. 그리고 연구된 논문들은 자율주행이 용량에 미치는 영향을 분석한 HCM 7버전이 발행되기 전 연구로서 자율주행에 관한 정확한 용량분석 확인이 어렵다. 시뮬레이션을 활용하여 신호교차로 및 도심부에서의 연구가 미비한 실정이다. 이를 위하여 Macro 시뮬레이션을 활용하여 교통수요를 정산하고 이를 바탕으로 Meso 시뮬레이션을 활용하여 자율주행차량이 도로용량에 미치는 연구를 국내에서는 처음 시행하였다. 더욱이 대부분의 연구가 자율주행 점유율에 따라 안전성, 환경, 지체, 용량의 변화를 분석하는 것에 중점을 두는 반면 본 연구에서는 자율주행차량의 도입효과를 일반 신호교차로의 한 축에 적용하고 다양한 시나리오를 생성하여 교통 용량 분석을 수행하는 것으로 보다 현실성 있고 구체적인 도입 효과를 산정할 수 있을 것으로 기대된다.
방법론
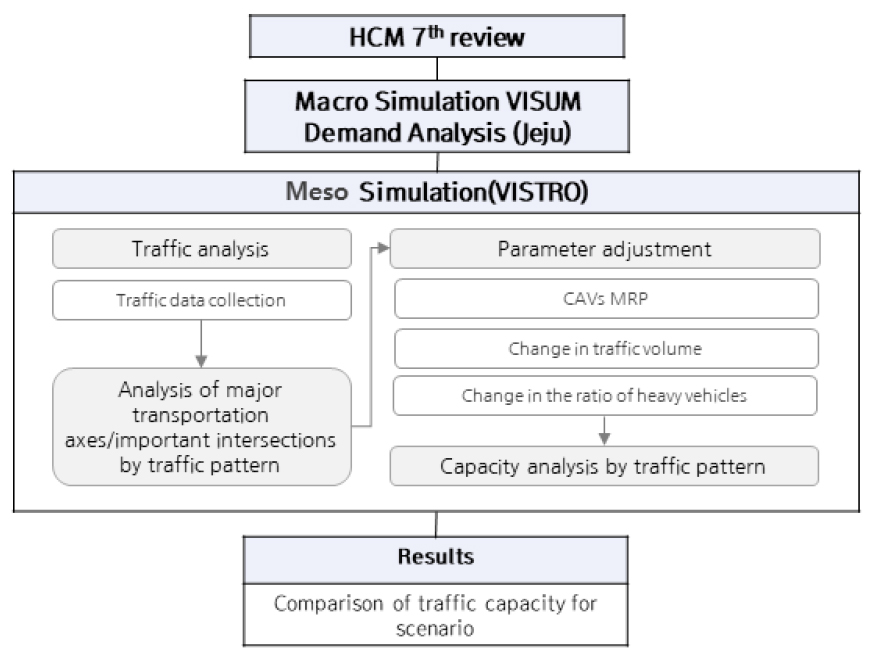
본 연구는 CAV차량의 시장 점유율에 따라 네트워크 전체의 교통 흐름에 미치는 영향을 분석하고자 한다. 우선 2022년에 발행된 HCM 7th Edition을 리뷰하여, CAV차량이 도로 용량에 미치는 영향을 고속도로와 도시 거리 사이의 Spill back, 시설 간 이동 시간 추정, 차선별 분석 등에 대한 내용을 검토하였다. 국가교통데이터베이스에서 제공하는 가구통행실태조사와 사회경제지표를 사용하여 수요를 생성하고 통행속도 분석을 위해 각 지점별 통행량을 수집하였다. 수집된 데이터는 PTV사의 Macro 교통 시뮬레이션인 VISUM을 활용하여 분석된 수요와 통행량을 비교하여 정산하였다. 특정한 지역에 대한 교통분석을 하기 위하여 Mesoscopic 모델인 VISTRO를 사용하였다. VISUM에서 만들어진 네트워크와 OD 메트릭스는 VISTRO에 입력되어 HCM 7에서 제시하는 방법으로 분석을 실시하였다. 이때, 본 연구에서 분석하고자 하는 CAV 차량의 점유율, 교통량, 중차량의 비율을 다양하게 적용하여 각 교차로별 용량을 분석하였다. 본연구의 수행과정은 Figure 1과 같다.
1. HCM(Highway Capacity Manual) 7th 리뷰
미국 교통 연구 위원회(TRB)는 이전에 논의된 HCM 6.1과 달리 TRB 2022 연례 회의에 맞춰 제7판 도로용량편람을 공식적으로 발표하였다. 새롭게 출판된 도로용량편람(HCM 7th Edition)은 자율주행차량이 도로 용량에 미치는 영향을 포함하였다. 가장 큰 변화는 Connected and Autonomous Vehicle(CAV)의 용량 영향에 대한 지침, 고속도로와 도시 거리 사이의 Spill back을 평가하고, 시설 간 이동 시간을 추정하고, 고속도로에 대한 차선별 분석을 수행하는 새로운 네트워크 분석 제시한다. HCM 7판의 신호교차로에서 자율주행관련 용량분석은 아래와 같다. 자율주행 차량의 비율, 일반 도로의 폭, 중차량의 비율, 자회전 또는 우회전 차로의 길이 등 도로 측면에서 용량에 직접적인 영향을 미칠 수 있기 때문에 전송 네트워크 링크의 분류는 여러 요소를 연결하는데 매우 중요하다. 결과적으로, 주어진 경로를 이동하는 모든 차량은 최종서비스에 영향을 미친다. 6.1과 달리 7에서는 CAV 시장점유율에 대한 요인이 추가되었으며 식은 Equation 1와 같다.
where,
: adjusted saturation flow rate(veh/h/ln),
: base saturation flow rate(pc/h/ln),
: adjustment factor for lane width,
: adjustment factor for heavy vehicles and grade,
: adjustment factor for existence of a parking lane and parking activity adjacent to lane group,
: adjustment factor for blocking effect of local buses that stop within intersection area,
: adjustment factor for area type,
: adjustment factor for lane utilization,
: adjustment factor for left-turn vehicle presence in a lane group,
: adjustment factor for right-turn vehicle presence in a lane group,
: pedestrian adjustment factor for left-turn groups,
: pedestrian-bicycle adjustment factor for right-turn groups,
: adjustment factor for work zone presence at the intersection,
: adjustment factor for downstream lane blockage and,
: adjustment factor for sustained spillback
에 대한 조정계수 식은 Equation 2와 같다.
where,
: ercentage heavy vehicles in the corresponding movement group(%),
: approach grade for the corresponding movement group(%)
2. Macro 시뮬레이션
Macro 시뮬레이션은 주로 대규모 지역의 분석을 위해 사용되며, 현재 교통수요를 바탕으로 앞으로 변화할 교통수요를 예측하여 그에 맞는 교통계획 후 통행패턴을 분석하는 것을 목표로 한다. 이는 미래에 교통인프라나 교통 수요 유발요인이 변경되었을 때 다양한 요소를 반영하여 도로상에 교통량이 어떻게 변하는지 분석할 수 있다. 이 시뮬레이션을 통해 미래의 O/D, 수단별 총 통행시간, 환승 시간, 링크별 통행량 등을 고려할 수 있다. 이러한 고려사항들은 자율주행차량이 도로에 도입될 시점이 현재와는 차이가 발생하기 때문에 미래의 교통 상황을 판단하기에 매우 중요하다. 정확한 수요예측은 미래의 자율주행차량과 일반차량과의 혼재상황시 나타나게될 교통용량의 변화를 가장 근접하게 분석할 수 있다.
Macro 시뮬레이션인 PTV사의 VISUM을 활용하여 지정된 지점에 노드, 링크, 링크 유형, 길이, 전환 시간, 용량, 속도, VDF(Volume delay function) 등의 데이터를 입력변수로 하여 네트워크를 구축하고 가구통행실태 조사와 사회경제지표로부터 나온 통행행태를 바탕으로 OD 메트릭스를 추정한 후 통행 배정한다. 그런 다음 네트워크상에 배정된 수요를 종합적으로 확인하고 식별된 오류를 수정하여 최종 모형을 개발한다. 이 모형의 신뢰성을 위하여 GEH지표를 통하여 모형의 신뢰성을 검증한다.
3. Meso 시뮬레이션
Macro 시뮬레이션은 전체적인 교통 흐름을 추정, 예측하기에 매우 용이한 도구이지만 소규모 지역의 교통 용량을 세밀하게 분석하기에는 한계가 존재한다. 그러므로 Micro 시뮬레이션을 활용하여 차량 괘적을 고려한 디테일한 분석을 여러 분야에서 시행하고 있다. 하지만 Micro 시뮬레이션의 네트워크를 구성하기 위한 시간과 노력이 막대하고 계산하는데 필요한 비용이 크기 때문에 최근에는 메조(Meso) 스케일의 시뮬레이션의 활용이 늘어나고 있다. Vistro는 meso scopic 시뮬레이션으로서 교통영향평가시 주로 사용되는 소프트웨어이다. 이는 HCM 2000, 2010, 6판, Canadian Capacity Guide 및 ITE Trip Generation 등 여러 가지 분석 방법론을 제공한다. 이 분석방법론을 활용하여 교통용량, 밀도, 속도, 지연 시간 및 대기 길이를 빠르게 예측할 수 있는 시뮬레이션이다. Macro시뮬레이션에서 정산된 모형을 Vistro에 입력하게 되면 네트워크, 파라메터, 차량 경로가 자동으로 생성된다. 다음 단계로 특정 파라미터 영역에 대한 독립 변수는 HCM 7th 방법론내의 변수를 Vistro내에서 구현한다. 생성된 모델은 현재 상황뿐만 아니라 미래에도 유용해야하기 때문에 네트워크, 자율주행 차량 특성과 같은 변화에 대한 예측을 포함한다.
4. Micro 시뮬레이션
Micro 시뮬레이션은 소규모 단위의 교통흐름을 분석하기에 용이하며, 다양한 파라미터를 변경할 수 있어 개별 차량의 통행 패턴을 모사하며 차량의 위치, 속도와 같은 세부적인 교통흐름을 나타낸다. 이를 통해 네트워크 및 지점별 지체, 속도, 차량의 총 이동시간, 대기행렬길이, 온실가스 배출량 등을 분석할 수 있다.
5. 교통분석 프로그램 선정
위에서 언급한바와 같이 각 시뮬레이션마다 적용범위 및 특성이 조금씩 상이하다. 현재 대상지의 특성상 네트워크의 사이즈가 작아 Micro 분석이 가능할 것으로 판단되어지나 Micro시뮬레이션은 교통계획적인 면에 있어서 미래 수요를 예측할수 없고 비용적으로 큰 문제가 발생한다. 게다가, 상세한 네트워트를 구축하는데 다른 시뮬레이션에 비해 많은 시간과 비용이 요구되며 네트워크를 구축한 후 시뮬레이션을 구동하는데도 다른 시뮬레이션에 비해 많게는 100배 가량의 분석시간이 소요된다. 이는 Micro 시뮬레이션의 속성상 무작위성을 고려하기위해 다중실행되는 과정에서 높은 계산시간을 발생시킨다. 본 연구에서는 향후 훨씬 큰 네트워크분석 시 본 연구의 방법론이 유의미하다는 것을 증명하기위해 Macro, Meso 분석법을 착안하였다. Meso 시뮬레이션의 장점을 활용하여 디테일한 네트워크 구성이 필요없이 HCM의 내용을 충실하게 표현해 낼 수 있다.
사례연구
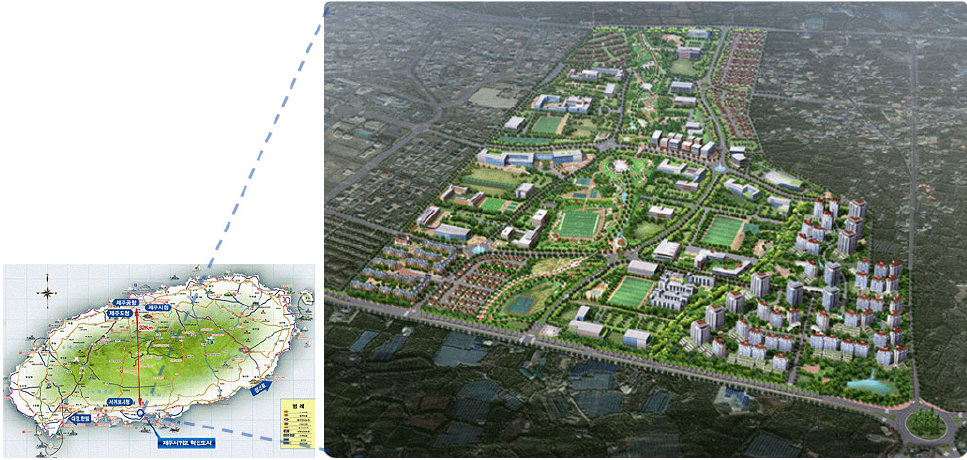
제주혁신도시는 제주도 서귀포시 서호동·법환동 일원 114만㎡으로 공공기관 지방이전과 산,학,연,관이 서로 협력하여 최적의 혁신여건과 수준 높은 생활환경을 갖춘 새로운 차원의 미래형 도시를 표방하여 개발된 지역이다(Figure 2). 국토교통부(Ministry of Land, Infrastructure and Transport)에 따르면 2003년 “국가균형발전을 위한 공공기관 지방이전 추진 방침” 발표를 시작으로 혁신도시가 수립되었다1). 제주혁신도시는 서귀포 구도시와 신도시의 중간지역으로 경사가 완만한 평탄지 지역이다. 국토연구원에서 발간한 ‘지역 상생발전을 위한 혁신도시 연계형 원도심 재생 방안 연구’보고서에 따르면 2019년 6월말 기준 거주인구는 4,753명으로 계획인구 5,100명으로 달성률은 95.1%이다. 제주버스정보시스템(Jeju Bus Information System)에 따르면 2020년 12월 기준 제주혁신도시 부지 내 버스정류장 23개소가 위치하고 리무진 버스, 지선, 간선 버스 37개가 운행을 하고 있으나, 도시 내 교통 및 제주도 전 지역과의 이동 측면에서 교통 개선이 필요한 지역이다2).
JDC(제주국제자유도시개발센터)에서 ‘제주 혁신도시 스마트 모빌리티 리빙랩 조성사업’을 진행중에 있으며, 이는 혁신도시 내에 교통 활성화를 위해 자율주행 버스를 고정형과 비고정형으로 나누어 혁신도시 내부를 순환하는 버스이며, 대중교통과의 연계를 돕기위해 퍼스널 모빌리티(킥보드, 전기자전거, 전기오토바이 및 정류장)을 설치하였다. 또한, 차량을 개인의 소유에서 공유의 개념으로 이용할 수 있도록 공유전기차 전기차를 시범 운행하였으며, 2020년 12월 기준 전기차량 및 수소차량 충전소 4개소가 위치해 있다. 제주 혁신도시에서는 전기차의 비율이 매우 높으며, 자율주행 차량으로 전기차에 적용되어질 것으로 기대되어지고 MaaS와 자율주행 차량이 도입될 수 있는 기반이 빠르게 구축되고 있는바 이 지역을 대상지로 선정하였다.
1. 데이터 수집
제주도 혁신도시내의 OD 메트릭스와 네트워크를 구축하기위해 2016년 가구통행실태조사자료 및 사회경제지표를 활용하고 2021년을 기준으로 수요예측을 실시하였다. 제주특별자치도 교통정보센터(Jeju Traffic Information Center)에서 제공하는 2021년 2월 3일 오전첨두시간 교통량 데이터를 수집하여 시뮬레이션에서 배정된 교통량과 실제 교통량을 비교하여 모형의 파라메터들을 정산하였다3).
2. Macro 시뮬레이션 모델 개발
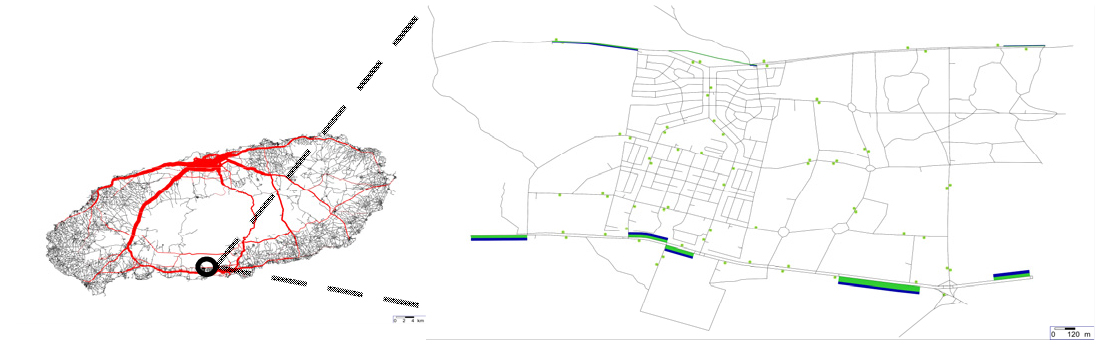
Macro 시뮬레이션의 특성상 제주도 전체를 구축한 후 혁신도시 부분을 추출하였다. 제주 혁신도시 네트워크 상에 교통존 21개, 링크 1254개, 노드 470개, OD pair 441개를 구축하였다. 일반도로 특성에 따른 자율주행 차량 도입 영향을 분석하기 위해 대상지 내 교통량이 많은 주요 신호교차로 한 축을 대상지로 선정하였다. 선정 결과, 제주도 혁신도시 6개의 교차로가 있는 연속류로 1개의 도로축(3.12km)을 설정하여 분석을 진행하였다(Figure 3). 대상지에서 9개의 지점이 분석되었으며, 각 지점별 정산값은 아래의 Table 1과 같다.
실제 교통량과 교통모델 교통량을 비교하기위해 GEH가 사용되었다. 일반적으로 GEH ≤ 5이면 분석된 교통량과 실제 교통량이 유의미한 값으로 일치한다고 간주된다. Equation 3는 GEH의 식을 나타낸다. 여기서, M은 트래픽 모델의 시간 당 교통량, C는 실제 시간당 트래픽 개수로 각 지점별 교통량을 비교할 수 있다.
Table 1에서 보다시피, 각 교차로별 GEH값이 0-1.7로 모든 지점의 값이 5 이하인 것을 확인할 수 있다. 이는 실제 교통 흐름과 시뮬레이션된 교통 흐름이 매우 유사하다는 것을 의미하고 이는 정산된 시뮬레이션 모델이 신뢰성을 가졌다고 볼 수 있다.
Table 1.
GEH analysis
| Section | 1 | 2 | 3 | 4 | 5 | 6 | 7 | 8 | 9 |
| Modelled values | 586 | 259 | 338 | 268 | 1511 | 1477 | 1918 | 3005 | 1788 |
| True values | 600 | 261 | 316 | 266 | 1502 | 1444 | 1919 | 3000 | 1789 |
| GEH | 0.8 | 0.2 | 1.7 | 0.2 | 0.3 | 0.1 | 0 | 0.1 | 0 |
3. Meso 시뮬레이션 모델 개발
혁신도시내에 가장 교통량이 많은 축을 분석대상지로 선택하였다. 이 축은 도로폭 3.5m, 속도 50km/h으로 설정하였고 3지 교차로 4개와 4지 교차로 2개가 위치해 있으며 주기는 3지 교차로의 경우 120초, 4지 교차로의 경우 180초로 설정하였다(Figures 4, 5). 위에서 언급한 HCM7판의 변수는 :1900veh/h/ln, : 1, : 1, : 0.05, : 0.9, : 1, : 1, : 1, : 1, : 1, : 1 값을 적용하였다. , 각 교차로별 보호 좌회전과 우회전 비율이 다르기 때문에 교차로마다 다르게 설정되었다. 시나리오별 적용값이 다르게 적용되었으며, 일반적인 교통량에서 중차량의 비율은 0%이며, 각 시나리오별 10%, 20%, 30%가 적용되었다.
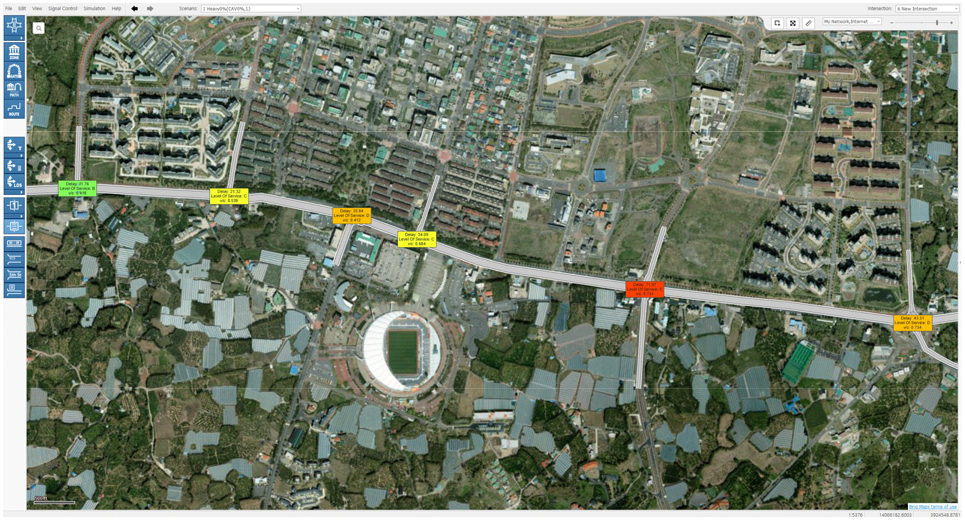
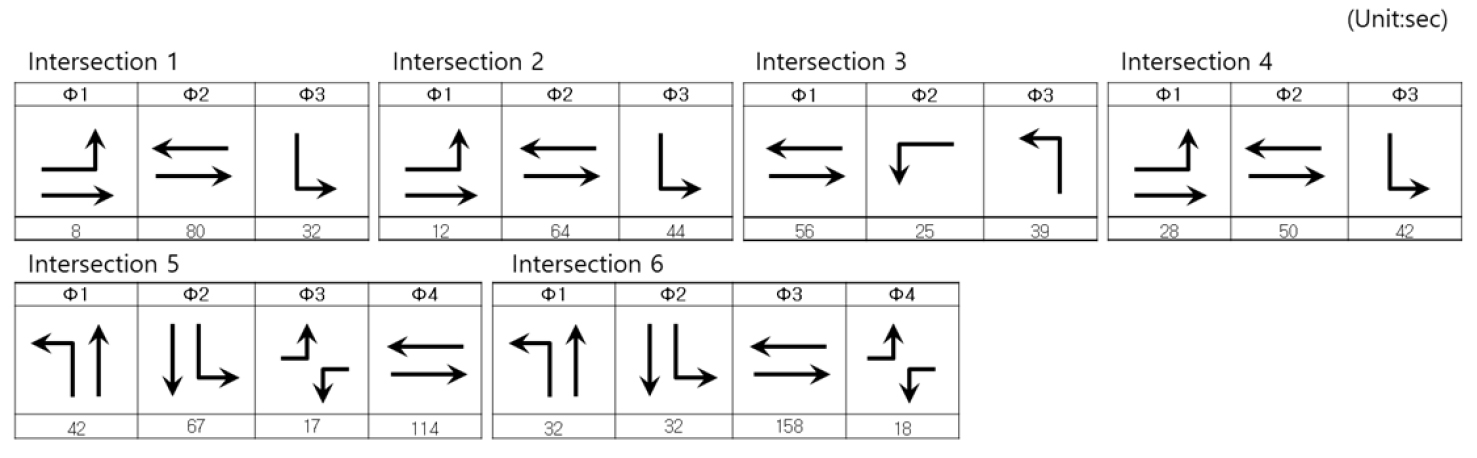
현재 혁신도시 내 본 연구를 위하여 지정된 교통축에 대하여 교통 흐름을 분석하였다. 왼쪽에서부터 순서대로 1, 2, 3, 4, 5, 6번 교차로로 설정하였으며, 1-6번교차로까지의 지체와 교통량 대 용량비(v/c)는 Table 2와 같이 분석되었다. 모든 교차로에서 교통량 대비 용량이 1 이하로 나타났고 각 교차로의 평균 지체가 가장적은 1번 교차로의 11.75초에서 지체가 가장 높은 5번 교차로의 71.97초사이의 값이 도출되었다.
각 교차로별로 차선수, 교통량, 기하구조, 현시가 다르기 때문에 교차로마다 분석 값이 상이하다. 1번 교차로에서 v/c와 지체가 가장 작게 나타났으며, 5번 교차로에서 v/c와 지체가 가장 높게 도출되었다.
Table 2.
Delay and volume per capacity for each intersection
| Section | 1 | 2 | 3 | 4 | 5 | 6 |
| Delay (sec) | 11.76 | 21.32 | 35.94 | 34.12 | 71.97 | 43.31 |
| v/c | 0.42 | 0.54 | 0.41 | 0.69 | 0.75 | 0.73 |
4. 시나리오 개발
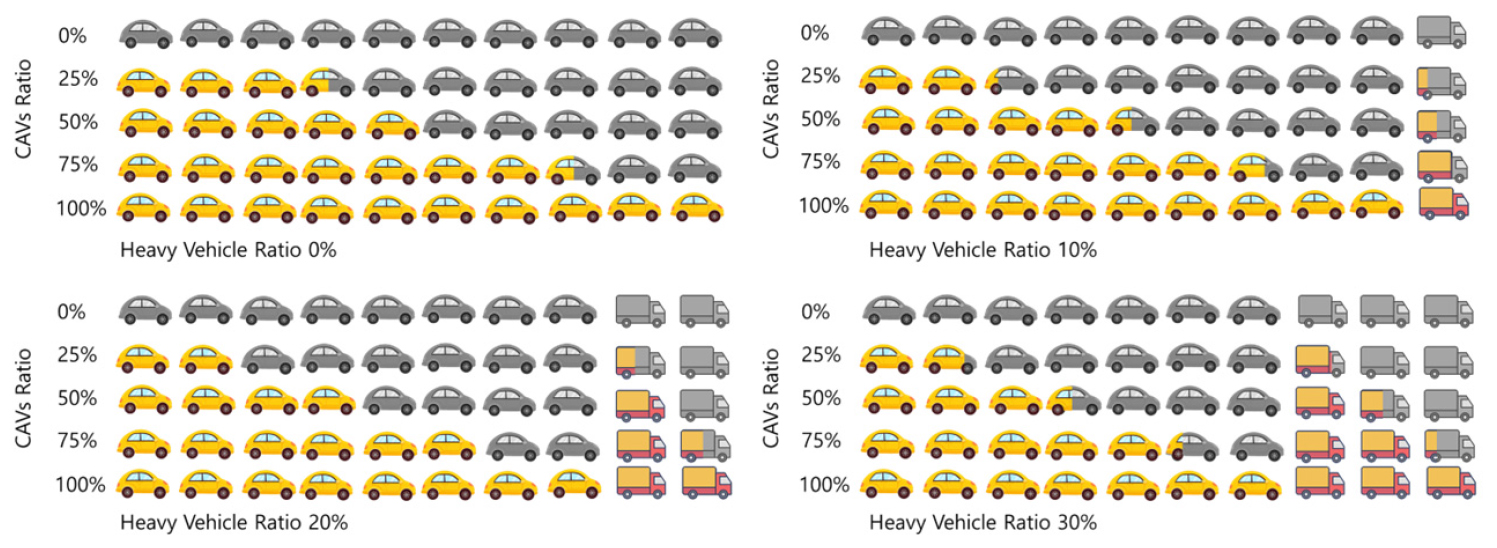
본 연구에서 고려하는 파라미터는 자율주행 차량 점유율, 교통량, 중차량의 비율이다. 점유율은 CAV차량이 전체 네트워크에 존재하는 비율을 의미하며, 0%, 25%, 50%, 75%, 100%로 구분하고, 중차량의 비율은 0%, 10%, 20%, 30%로 분류하였다. 현재 교통량을 기준으로 미래의 교통량 변화가 유발될 수 있는바 1.0, 1.2, 1.5배 증가되었을 때로 구분하여 분석을 실행하였다. 이는 기본적으로 교통 흐름에 변화를 줄 수 있는 요인이며, 각 파라미터 변수를 결합하여 총 5*4*3=60가지의 시나리오를 고려하였다. CAV 차량과 중차량의 비율변화에 따른 결합은 Figure 6와 같다.
결과
1. 지체
각 교차로마다 차선수가 달라 교차로별 용량의 차이가 존재하기 때문에 교차로별 효과를 분석하였다. 해당 지역의 결과는 자율주행 차량 점유율이 증가할 때 마 다 도로의 용량이 선형적으로 증가하였다. 중차량의 비율과 교통량이 증가함에 따라 도로 용량에 부정적인 영향을 미쳤다(Tables 3, 4 and 5).
CAV차량의 점유율이 증가함에 따라 지체는 감소하였으며, 기존 0% 대비 25%에서는 3.15-10.69%, 50%에서는 6.29-18.79%, 75%에서는 10.20-28.40%, 100%에서는 14.63-35.76% 감소한 것으로 분석되었다. CAV 차량의 비율이 75% 이후에서 감소 효과가 큰 것으로 분석되었다. 교차로별 교통량과 기하구조가 다르기 때문에 개선효과 또한 다르게 나타나는데 기존 지체가 가장 적었던 1번교차로에서 지체시간이 11.76초에서 최대 10.4초(14.63%감소)로 개선되었으며, 기존 지체가 가장 많은 5번 교차로에서는 71.97에서 49.88초(30.69%감소)로 개선되었다. 대부분의 경우 교통량이 많은 교차로에서 CAV차량의 비율이 높을수록 더 많은 지체감소를 확인할 수 있다. 한계 용량에 도달하기 전까지 CAV차량이 증가함에따라 지체는 빠르게 감소하다가 한계용량을 초과하면 개선효과가 작게 나타났다.
CAV점유율이 0%, 25%, 50%, 75%, 100%일 때 중차량의 비율에 따른 각 교차로별 지체시간 평균값의 차이는 30.40-74.52초(+44.12초), 32.97-61.55초(+22.58초), 30.46-49.22초(+18.76초), 27.87-36.95초(+9.08초), 25.58-30.08초로(+4.5초)로 중차량의 비율이 100%일 때 최대 89.8% 감소하였으며, CAV차량의 점유율이 높을수록 중차량이 지체에 미치는 영향은 적게 나타났다. 중차량의 비율에 따른 지체는 중차량의 비율이 10%일 때 0% 대비 4.67-28.13%, 중차량의 비율이 20%일 때 11.05-85.36%, 중차량의 비율이 30%일 때 20.15-171.15%까지 증가하였다. 교통량이 가장 적은 1번 교차로에서 11.76→14.13초(20.15%)로 중차량의 비율에 따라 지체시간에 가장 작게 영향을 미쳤으며, 3번교차로에서 35.94→97.45초(171.15%)로 가장 심하게 차이가 났다. 중차량의 비율이 가장 높았을 때 도로 용량에 가장 큰 영향을 미쳤으며, 비율이 높아질수록 도로 용량에 부정적인 영향을 미쳤다.
교통량이 1, 1.2, 1.5배일 때 평균지체는 각각 36.40(기준 값), 50.25(+38.05%), 93.27(+156.24%)초이다. 일정 수준까지 교통량이 많을수록 CAV 차량 비율이 미치는 효과가 큰 것으로 나타났다. 교통량이 도로의 최대용량을 초과하기 이전에는 지체에 작게 영향을 미치며, 최대 용량을 초과하면 지체는 폭발적으로 증가한다.
Table 3.
Delay according to the ratio of connected autonomous vehicles to heavy vehicles with original volume (Unit: sec)
Table 4.
Delay according to the ratio of connected autonomous vehicles to heavy vehicles with volume 1.2 times (Unit: sec)
Table 5.
Delay according to the ratio of connected autonomous vehicles to heavy vehicles with volume 1.5 times (Unit: sec)
2. 교통량대 용량비(V/C)
일반적으로 CAV MPR이 증가함에 따라 모든 시나리오에서 v/c는 감소하였고, 이는 CAV MPR에따라 교차로의 용량이 증가한다는 것을 나타낸다. 또한 중차량의 비율과 교통량이 증가할수록 v/c가 증가하는 것으로 분석되었다(Tables 6, 7 and 8).
CAV 점유율이 0%에서 25%, 50%, 75%, 100%로 증가할 때 각각 5.48-7.32%, 11.11-15.94%, 34.25-40.58%, 28.77-36.23%씩 감소하였며, 이에 따른 교차로의 용량 증대는 각각 5.80-7.90%, 12.50-18.97%, 27.27-43.75%, 51.85-68.30%이다. CAV 점유율 변화에 따른 v/c감소는 차량의 대수의 차이가 없기때문에 오직 CAV 비율에 따른 용량 증대이다. CAV 차량의 혼재 상황에서 도로에 미치는 영향은 상당했으며, 자율주행 자동차의 혼입률이 낮아 기존 운전자와의 혼란을 발생시킬 수 있는 초기 25%에서도 교차로의 용량은 증가하였다.
중차량 비율이 0%, 10%, 20% 30%로 변화됨에 따라 평균 v/c비는 각각 0.59, 0.64, 0.65, 0.77로 변하였다. CAV차량의 비율이 증가할수록 중차량의 비율에 따른 v/c변화는 작게 나타났으며, 각 교차로의 도로 용량까지는 교통량이 증가하면 중차량의 비율에 따른 변화가 점점 증가하였으나, 교통 용량을 초과하는 지점에서부터는 중차량 비율에 따른 변화가 감소하였다.
교통량이 증가됨에따라 v/c가 증가하는 것은 당연한 결과이며, 본 연구에서 교통량이 1, 1.2, 1.5배 증가 됨에 따라 모든 교차로 평균 v/c가 각각 0.59, 0.76, 1.12로 연쇄적으로 증가했으며, 포화 교통량이 이상으로 값이 커짐에 따라 v/c는 급격하게 증가하였다.
Table 6.
v/c ratio according to the ratio of connected autonomous vehicles to heavy vehicles with original volume
Table 7.
v/c ratio according to the ratio of connected autonomous vehicles to heavy vehicles with volume 1.2 times
Table 8.
v/c ratio according to the ratio of connected autonomous vehicles to heavy vehicles with volume 1.5 times
결론 및 향후연구
운전자의 개입이 없이 인간의 운전보다 정확하고 신속한 차량 제어를 통한 자율주행이 어떠한 파급효과를 미칠 것인가에 대한 연구가 필요한 시점에서 본 연구는 Macro, Meso 차원의 접근방법을 적용하여 CAV의 도입으로 인한 도로 용량 변화분석을 수행하였다. CAV차량의 비율이 증가함에 따라 일률적으로 지체는 감소하고 용량은 증가하는 추세를 보인다. 이는 점유율(MPR)이 증가할수록 교통류에 긍정적인 영향을 미친다는 것을 의미한다. CAV 점유율이 75%이상일 때부터 지체 및 용량변화에 큰 영향을 미쳤으며, 점유율이 100%일 때 지체는 35.76%까지 감소하고, 교차로의 용량이 최대 68.30%까지 증가하였다. CAV 혼입율에 따른 교통용량보정계수를 추론하였기 때문에 이 둘의 관계가 선형적인 관계를 보이고 있다. 시뮬레이션 상에서 자율주행 혼재시 교차로 지체 및 도로 용량에 긍정적인 영향을 미쳤다. Micro 교통류 분석을 통해서는 CAV의 혼입률이 높아야만 효과가 극대화 될 수 있음을 파악할 수 있었다. 또한, 각 교차로의 특성에따라 다른 결과가 도출되었는데 이는 더 다양한 주행 환경에서 연구가 수행되어져야 한다는 것을 시사한다. CAV차량이 혼재되어 있는 상황에서는 교통류의 혼잡한 상황이 계속될 것으로 판단되어지며, 보다 다양한 상황에서의 분석과 연구가 필요하다. 자율주행 도입을 위한 기초자료로 사용될 것으로 기대되어지며 향후 연구에서는 축 단위가 아닌 네트워크 차원의 교통용량 분석이 필요한 것으로 보인다.
시뮬레이션의 특성상 적용되는 범위와 목적이 상이하고 아직까지 다양한 시뮬레이션 간의 분석결과를 비교한 연구는 시행되지 않음을 확인하였다. 향후 같은 전제조건에서 Meso, Micro시뮬레이션 간의 분석을 진행하여 각 툴간의 장단점을 비교하고 분석해야하는 네트워크 규모와 연구목적에 맞는 시뮬레이션의 선택을 할 수 있도록 하고자 한다.
