

서론
선행연구
1. AV 혼입을 고려한 기준·가이드라인 및 용량보정계수(CAF) 개발 동향
2. 혼합교통류의 네트워크/거시적 영향
3. 본 연구의 차별성
연구방법론
1. 자율주행차량 수준 및 파라미터 설정
2. 시뮬레이션 대상지 선정 및 네트워크 구축·정산
3. 시뮬레이션 시나리오 설계
연구결과
결론
서론
도로 용량 분석은 도로 시설의 성능을 정량화하여 계획·설계·운영 의사결정의 기준을 제공한다. 실제 분석은 이상적인 기준 용량을 출발점으로 하되, 차로폭·종단 경사·중차량 비율·기하구조·환경 조건 등 현실 제약 요인을 보정계수(Adjustment Factor)로 단계적으로 반영하는 절차를 따른다. 이는 『Highway Capacity Manual(HCM)』과 국내 『도로용량편람』이 공통으로 취하는 기본 틀이다(HCM, 2022; MCT, 1999; MLTMA, 2013). 최신 HCM 7판(2022)은 여기에 CAV(Connected & Automated Vehicles) 관련 방법론(기획수준)을 추가하여 변화하는 교통환경을 일부 반영하고 있다. 반면, 국내 도로용량편람(2013)은 HDV(Human Driving Vehicle) 중심으로 작성되어 AV(Automated Vehicles)/CAV 혼입 효과를 직접 반영하지 못한다는 한계가 있다. 이러한 간극은 국내 실정에 맞는 보정계수 체계의 보완·개정 필요성을 뚜렷하게 시사한다.
자율주행·협력주행 기술의 도입은 차두시간 단축, 불필요한 가감속 억제과 V2X 기반 협력을 통해 용량 증대·안정성 향상을 가져올 잠재력이 크다. 다수의 연구에서 ACC만으로는 차로 용량 변화가 제한적이나, CACC/협력주행이 본격 적용되면 용량이 유의하게 증가하고, 충격파 감쇠·평균속도 안정화 등 긍정적 효과가 강화됨을 보였다(Shladover et al., 2012; Talebpour and Mahmassani, 2016).
다만 AV가 교통류의 대부분을 차지하기까지는 상당한 시간이 소요될 것으로 예상되며, 그 과정에서 다양한 수준의 AV와 HDV가 혼재하는 기간이 불가피하다. 이 때, 혼입률·주행행태·병목 유형(합류·차로 감소)·제어 전략에 따라 결과가 달라지고, 병목 구간·합류구간에서는 기대만큼의 이득이 나타나지 않거나 변동성 증가로 효율이 상쇄될 수 있다는 보고가 축적되고 있다(Aittoniemi, 2022; Choi and Shin, 2023; Ghiasi et al., 2017; Olia et al., 2018; Xiao et al., 2018). 따라서 동질행태군(주행행태 고정)과 혼합행태(정책적 보급 조합)를 구분하여 해석하는 체계가 요구된다. 본 연구는 이러한 맥락에서 기본구간을 대상으로, 국내 기준 체계에 적용 가능한 AV 혼입률별 용량 보정계수(CAF, Capacity Adjust Factor)를 정량화하고자 한다.
선행연구
1. AV 혼입을 고려한 기준·가이드라인 및 용량보정계수(CAF) 개발 동향
최근 연구들은 HCM 절차에 CAV 영향을 계획/기획 수준의 CAF로 반영하는 흐름을 정착시키고 있다. HCM 7th(2022)은 시설유형별로 혼입률을 입력하고 용량/서비스교통량을 보정하는 틀을 소개하고, 사용자 관점에서는 서비스교통량 표까지 제시하는 등 적용 경로가 비교적 명확해졌다. 다만, 현장 검증은 제한적이며, 모형 가정(간격/반응/협력주행 수준)에 민감한 상황이다.
이 흐름을 실증·모형으로 뒷받침하는 것은 오리건 교통국 보고서와 일련의 HCM-CAF 파생 논문들로, 시설유형별(본선, 신호교차로, 회전교차로, 양방향정지교차로(Two Way Stop Control, TWSC) 등) CAF 표와 회귀식을 제시했다(Adebisi et al., 2020; Adebisi et al., 2022; Gueriau and Dusparic, 2020; Jiang et al., 2022; Schroeder et al., 2022; Nian et al., 2023). 예컨대 Adebisi et al.(2020)는 고속도로 본선 구간을 대상으로 미시시뮬레이션과 회귀모형을 사용하여 MPR(Market Penetration Rate)과 행태 파라미터를 조합하여 HCM에 호환되는 CAF 표/식을 도출해 계획수준 의사결정에 바로 사용할 수 있도록 정리하였다. Adebisi et al.(2022)는 신호교차로에서 포화교통류율 보정(보호/허용 회전)을 제시해, 운영형태까지 포함한 CAF를 제시하였다. Jiang et al.(2022)는 회전교차로의 진입 용량을, Nian et al.(2023)은 TWSC의 임계간격/추종간격 변화를 반영해 HCM 산식 보정 절차와 표를 제시하였다. 공통적으로 HCM 산식의 핵심 변수(포화교통류율, follow-up/critical headway 등)를 MPR 함수로 보정하는 방식이며, 출력은 표 또는 단순식으로 제시하여 실무 친화적이다.
동시에, 일부 연구는 승용차환산계수(Passenger Car Equivalent, PCE)와 CAF를 통합하는 관점을 제안하였다. Hurtado-Beltran and Rilett(2021)은 CAV 트럭 군집주행 시나리오에서 HCM-6의 EC-PCE 절차를 확장해 용량·PCE 동시 조정이 가능함을 보였고, 트럭 비율, 군집 설정에 따라 유의한 용량 변화가 발생함을 정리하였다. 정리하면, 최근 CAF 연구들은 시설유형별·표준화된 출력형식을 공통 분모로 가지며, 차이는 보정 대상 파라미터와 가정이 있으며, 이에 따라 보정 크기가 달라진다. 국내 적용 관점에서는 도로용량편람(2013)의 HDV 중심 체계와 CAF 프레임을 정합시키는 작업이 핵심 과제로 남아있다.
2. 혼합교통류의 네트워크/거시적 영향
최근 연구들은 연속류·단속류 네트워크 차원에서 CAV 혼입이 교통기본도(Fundamental Diagram, FD)·지체·통행시간·온실가스 배출 등을 유의미하게 바꿀 잠재력을 제시하고 있다. 다만 효과의 방향과 크기는 주행행태, 운영 전략(신호·연결로·차로관리), 수요·공간분포 등의 가정에 매우 민감하다. 예컨대 Huang et al.(2023)은 대규모 시뮬레이션에서 네트워크 용량이 최대 19% 증가하는 반면, 임계 축적은 낮아질 수 있음을 보여 혼잡 구간에서의 CAV 운용 민감성을 강조했다. Bilal and Giglo(2023)은 정량화된 혼입률(QPR) 개념을 도입해 FD 특성 변화를 정리했고, Ge et al.(2024)는 비평형 DNL을 활용해 100% CAV 시 온실가스 배출이 20% 감소할 수 있는 가능성을 확인하였다. 또한 일부 논문에서는 혼입률만으로 설명되지 않는 비연속성이 확인된다. Oh et al.(2023)은 신호교차로에서 AV 수준과 혼입률을 교차 설계해 지체/속도 변화가 시나리오에 따라 상이함을 보였고, 이는 신호·궤적 최적화 등 운영 전략 병행 시 편익이 늘어날 수도 있음의 여지를 시사하였다. 한편 Stueger et al.(2025)의 연구는 보수적 주행 파라미터 세팅 시 네트워크 성능이 악화될 수도 있음을 보고하여 행태·운영 전략의 민감도를 재확인하였다. 요약하면, 혼합교통류 네트워크 연구들은 주행행태·제어·수요에 따라 비연속적이고, 조건에 따라 다양한 효과가 흔하게 관찰됨을 공통적으로 보여주고 있다.
3. 본 연구의 차별성
CAF 및 혼합교통류 연구들은 HCM 7판에 CAV 영향을 반영하는데 중요한 기여를 했으나, 본 연구에서 직접적으로 활용하기에는 몇 가지 구조적인 한계를 가진다. HCM-CAF 계열 연구들은 대부분 북미 교통구성·기하구조·속도체계를 전제로 하고 있어 국내 고속도로 기본구간과는 속도 수준·혼잡 패턴·중차량 비율 등이 상이하다. 또한, 다수의 연구에서는 CAV를 단일 행태로 분석하거나, 혼입률만을 설명변수로 사용하는 경향이 있어, 본 연구에서 제시한 것과 같이 다양한 주행행태를 설정하여 도로용량편람 수준의 단순 CAF 표/식으로 어떻게 반영할지에 대해서는 아직 충분한 정리가 되어있지 않다.
본 연구는 고속도로 기본구간을 대상으로, 국내 도로용량편람(2013) 체계를 기준선으로 삼아 AV 혼입률과 기술 수준(행태군)을 동시 고려하여 Cautious/Normal/Aggressive/CAV 행태군과 혼입률을 명시적으로 모형화하고, CAF를 실무 적용 가능한 형태로 산정·제시하였다. 또한 실측 대상지 자료를 활용하여 도로용량편람 입력·출력 구조 및 주요 파라미터와 정합을 맞추는 방식으로 현실성·신뢰성을 강화하였다. 아울러 동질행태군과 혼합행태를 분리하여 HDV 대비 AV 주행행태별 용량의 상대적 이득/손실과 혼합행태 시나리오의 기대치 범위를 함께 제시하였다. HCM 7판(2022)이 계획수준에서 CAV 영향을 고려하였으나, 국내 기준 체계에 직접 연결되는 CAF 산정은 여전히 공백에 가깝다는 점에서 본 연구의 실무적 기여가 있다.
연구방법론
최근 AV 기술은 급속히 고도화되고 있으나, 현실 교통류를 지배할 수준의 보급·혼입(𝛼)에 이르지 못해 현장에서는 충분한 AV 표본 확보가 어렵다. 이로 인해 현장 기반으로 AV 혼입 효과를 직접 추정하는 데에는 근본적인 제약이 있으며, 동 시간·동 장소에서 혼입률·행태 수준을 통제하기도 사실상 불가능하다. 이러한 상황을 고려하여 본 연구는 실제 고속도로 기본구간(연속류)를 분석 대상으로 하되, 도로용량편람의 용량 보정계수 도출 목적에 부합하도록 제한속도, 차로수, 중차량 비율, 램프 영향 배제 등 현장 제약 조건을 최대한 동일화한 대표 구간을 선별하였다.
선정 구간을 정합한 뒤, AV 수준, 행태, 혼입률을 실험 요인으로 체계적 시나리오를 구성하고, VISSIM 2024로 분석하였다. 모든 시나리오는 동일 네트워크·동일 수요·동일 관측 위치를 유지한 채 AV 관련 요인만 변화시키도록 설계하여 혼입에 기인한 순수 효과를 분리했다.
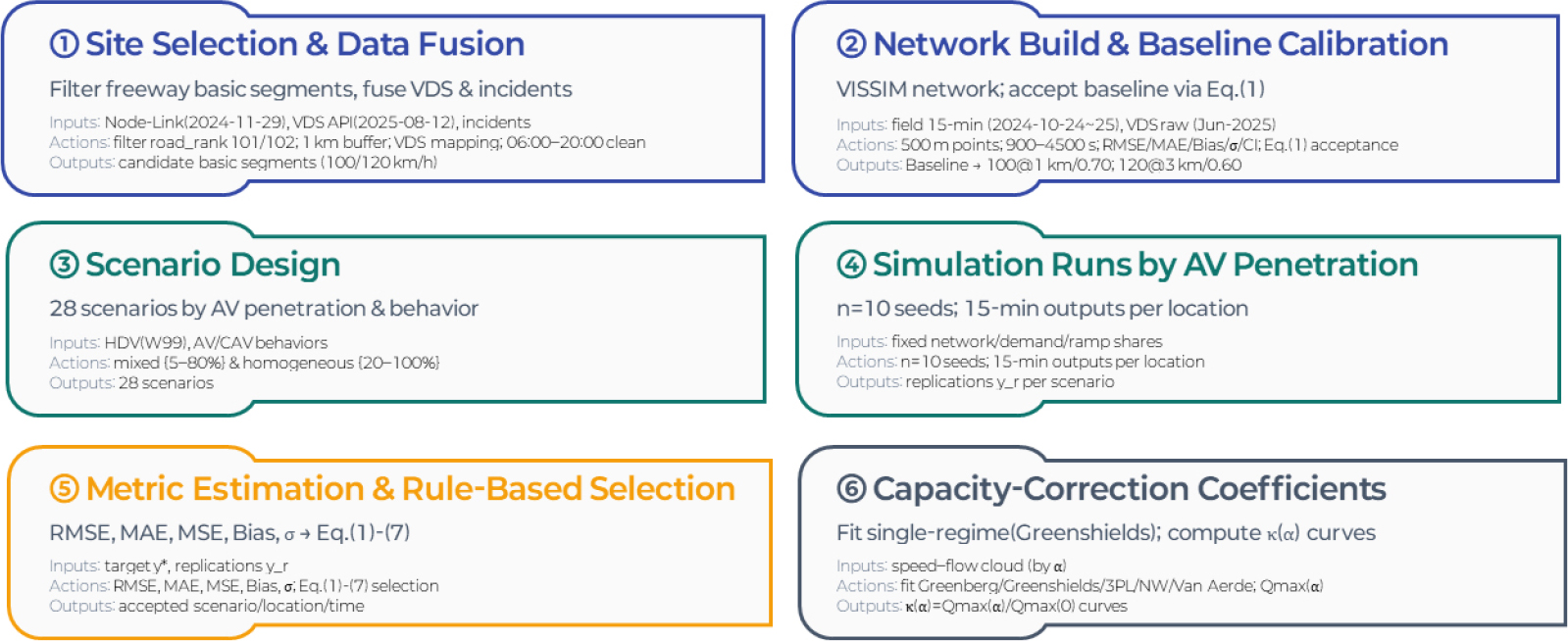
‘기준 시나리오 정산’에서는 RMSE/MAE·Bias·반복 표준편차(veh_std) 포함 여부로 기준 시나리오를 확정하고, ‘시뮬레이션 시나리오 설계’에서는 기준 시나리오 대비 용량 보정계수 𝜅(𝛼)를 산정·비교한다. Figure 1은 대상지 선정 → 네트워크 구축·정산 → 시나리오 설계 → 반복 시뮬레이션 → 지표 산정·선정 규칙 적용 → 보정계수 도출의 전체 흐름을 요약한다.
1. 자율주행차량 수준 및 파라미터 설정
본 연구에서 AV와 HDV는 모두 승용차 기준으로 모형화하였다. 차량 제원은 「도로의 구조·시설 기준에 관한 규칙」 승용자동차 제원을 준용하고, 시뮬레이션 3D 모델은 V3DM 2.5와 Sketchup 2013을 사용하여 길이 1.7m, 폭 2.0m, 축간거리 2.7m, 앞·뒷내민길이 0.8/1.2m로 구현하였다. VISSIM 희망속도(Desired speed) 배치는 다음의 원칙으로 설정하였다. AV와 HDV는 대상 VDS 15분 집계 속도에 대해 자유류 상태에서의 p5, p15, p50, p85, p95, p99 분위수를 그대로 사용하여 현장 분포를 재현하였고, p0과 p100은 p5·p95를 이용해 완만하게 외삽하였다. 이러한 분위수 배치의 예시는 Table 1에 정리하였다. 연결로의 HDV 희망속도는 58-68km/h의 범위를 부여하여 속도 이질성을 반영하였다.
Table 1.
Highway basic segment desired speed percentile summary
| Desired speed (km/h) | p00 | p05 | p15 | p50 | p85 | p95 | p99 | p100 |
| 120 | 97.50 | 101.40 | 103.60 | 108.20 | 115.60 | 118.80 | 122.10 | 125.40 |
| 100 | 76.60 | 93.90 | 96.00 | 98.40 | 100.70 | 102.10 | 103.70 | 108.90 |
AV의 기술수준은 Level 4/4+를 가정하고, 센서 기반 자율주행(ACC 포함)을 AV, 통신 기반 협력주행(CACC 포함)은 CAV로 정의하였다. 주행행태는 Cautious, Normal, Aggressive, CAV의 네 유형으로 구현하였고, 모든 유형의 차량추종은 Wiedemann 99를 사용하였다. 고속도로 기본구간에서의 목표 차두시간(headway)은 Aggressive 1.11s, Normal 1.12s, Cautious 1.72s, HDV 1.62~1.77s로 설정하였으며, 선행차가 AV/CAV인 경우 Aggressive 행태의 차두시간은 0.81s까지 조건부 단축되도록 규칙을 부여하였다. 행태별 핵심 파라미터(CC0, CC1, CC2, CC3, CC8, CC9와 필요 차로변경 시 감속 한계, 협력 차로변경 설정 등)은 Tables 2, 3에 수록하였다. 특히 CC1은 선행차가 CAV일 때 0.9s에서 0.6s로 감소하도록 구현하여 협력주행을 반영했다.
Table 2.
Notation & units (Wiedemann 99 & lane-change parameters)
Table 3.
Driving parameters by vehicle type/behavior
| Category | HDV | AV | |||
| Cautious | Normal | Aggressive | CAV | ||
| CC0 | 1.5 | 1.5 | 1.5 | 1.0 | 1.0 |
| CC1 | 0.9 | 1.5 | 0.9 | 0.9 | 0.9(0.6*) |
| CC2 | 4.0 | 0.0 | 0.0 | 0.0 | 0.0 |
| CC3 | -8.0 | -10.0 | -8.0 | -6.0 | -6.0 |
| CC8 | 3.5 | 3.0 | 3.5 | 4.0 | 4.0 |
| CC9 | 1.5 | 1.2 | 1.5 | 2.0 | 2.0 |
| Own (Nec. LC) | -4.0 | -3.5 | -4.0 | -4.0 | -4.0 |
| Trailing (Nec. LC) | -3.0 | -2.5 | -3.0 | -4.0 | -4.0 |
| #IO | 2.0 | 2.0 | 4.0 | 4.0 | 4.0 |
| Observed Ad | No | No | Yes | Yes | Yes |
| Coop | No | No | Yes | Yes | Yes |
2. 시뮬레이션 대상지 선정 및 네트워크 구축·정산
대상지 선정은 국가 표준노드링크 최신본(2024-11-29)을 바탕으로 분기부(코드 106: IC/JC) 중 road_rank 101·102를 1차 필터링한 뒤, 분기부 중심 반경 0.5km 버퍼를 적용하여 연결로 영향권을 제거하는 절차로 진행하였다(ITS National Transport Information Center, 2024a; ITS National Transport Information Center, 2024b). 한국도로공사 고속도로 공공데이터포털의 VDS 위치 정보(2025-08-12 API)를 좌표 매칭하고, 돌발(공사·사고) 정보를 연계하여 06:00-20:00 범위에서 해당 시간대 관측치를 제외하였다(Korea Expressway Corporation Highway Open Data Portal, 2025a; Korea Expressway Corporation Highway Open Data Portal, 2025b). 분석 원자료는 한국도로공사 ‘2024년 고속도로 교통량’ 중 2024-10-24 07:00~10-25 07:00까지의 교통량과 2025년 6월 VDS 전일자료이다(Korea Expressway Corporation, 2024).
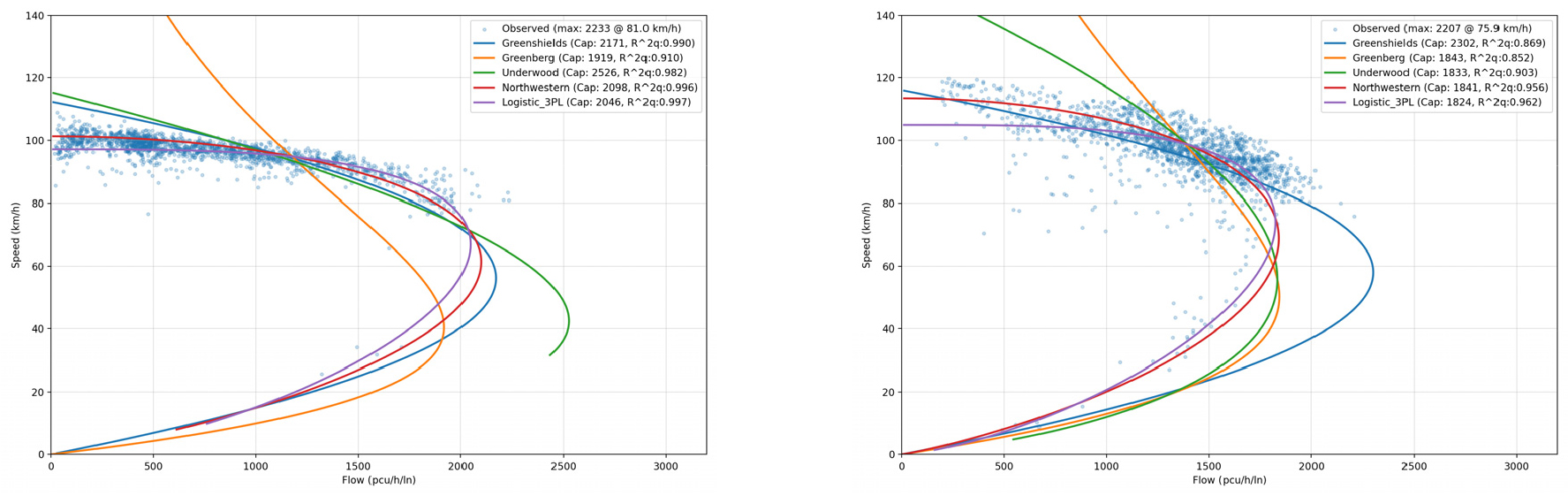
제한속도별(100·120km/h) 1차로 교통량 상위 30개 지점을 예비 대상으로 설정한 후, 최대 관측교통량·single regime 모형을 통한 최대 추정교통량·편람 용량 간 차이가 최소가 되는 지점을 선별하였다. 이때, 트럭 비율이 높으면 단일 루프 VDS 검지기의 속도가 낮게 나오는 것을 확인하여, 해당 값을 보정하여 진행하였다(Wang and Nihan, 2000). 임계속도 기준(100km/h → 80km/h, 120km/h → 85km/h)은 참고값으로 사용하되, 루프 속도 추정의 통상 오차(약 1-6km/h)(Wang and Nihan, 2003)와 15분 집계·일자 변동을 고려한 ±5km/h 합리성 범위를 소프트 제약으로 반영하였다(Dowling et al., 2004). 모형 적합 결과, Figure 2와 같이 120km/h에서는 중부고속도로 증평IC → 오창JC(기점방향), 100km/h에서는 남해고속도로 산인JC → 내서JC(종점방향) 종합점수 최소 지점으로 도출되어 대표 구간으로 확정되었다.
정산 실험은 본선 1차로에 500m 간격의 Data Collection을 배치하고, 0-4500s(Warm-up 900s 포함) 동안 15분(900s) 간격으로 결과를 추출하였다. 정산 변수는 시간대(TimeInt), 본선비율(연결로 진출비율), 관측 위치(Point_m)이며, 반복수를 n=10으로 설정하였다. 기준 시나리오 정산에서 동일 조건 조합(시간대-지점-본선비율)에 대해, 속도로 우선 소프트제약을 한 이후에 서로 다른 난수로 수행한 n회 반복 시뮬레이션의 15분 교통량을 바탕으로 정합성 평가를 수행하였다. 이때, 정합지표는 평균오차(Bias), MSE, RMSE, MAE, 표준편차로 설정하여 분석을 수행하였다.
기준 시나리오 정산에서 동일 조건 조합에 대해, 서로 다른 난수로 수행한 회 반복 시뮬레이션의 15분 교통량을 이라 하고, 동일 시점·동일 위치의 목표(관측) 15분 교통량을 라 하였다. 이때 오차 , 평균오차 , MSE, RMSE, MAE, 반복간 표준편차 , 평균 모의값 는 Equations 1, 2, 3, 4, 5, 6, 7으로 정의하였다.
본 연구에서는 동일 조건 조합들 사이에서 i) RMSE를 최소화하고, ii) 동률 또는 근접일 때 |표준편차|가 더 작은 조합, iii) 반복 표준편차 가 더 작은 조합을 최종 우선하도록 규칙을 설정하여 진행하였다.
그 결과, 100km/h 대표구간은 1800-2700s @ 1,500m, 본선비율 0.80, 120km/h 대표구간은 900-1,800s @ 3,500m, 본선비율 0.80이 기준 시나리오로 확정되었다. 두 경우 모두 RMSE/Bias가 충분히 작으며 가 낮아 통계적 적합성과 재현성이 확보되었다(예: 100km/h의 경우 RMSE = 10.02, Bias = 0.2 = 3.34; 120km/h의 경우 RMSE = 6.29, Bias = -3.4, = 1.77).
3. 시뮬레이션 시나리오 설계
시나리오 설계의 목적은 AV 혼입률 변화가 용량에 미치는 효과를 기존 시나리오 대비 정량화하는 것이다. 네트워크, 수요, 연결로 진출 비율, 관측 위치는 이전에 확정된 값으로 고정하고, AV 혼입률(𝛼)과 주행행태(Cautious/Normal/Aggressive/CAV)만 변화시켰다. 모든 조합은 서로 다른 난수로 10회 반복하여 분산과 신뢰구간을 추정하였다.
시나리오는 Tables 4, 5와 같이 총 25개로 구성된다. (i) 기준 시나리오 1개(HDV-only, 𝛼=0.0), (ii) 혼합행태 4개(𝛼=0.2, 0.4, 0.6, 0.8) (iii) 동질행태 20개(각 행태별 𝛼=0.2, 0.4, 0.6, 0.8, 1.0)이다. 혼합행태에서는 각 혼입률 𝛼에서 AV를 Table 3.와 같이 네 행태로 분할하며, 이때 분할비는 외부 수요전망·선행연구를 근거로 설정한다(Park et al., 2024). 동질행태군은 혼합행태 결과 해석의 상·하한 기준선을 제공한다.
시나리오 결과는 속도-교통량 점군을 Single-regime 모형인 Greenshieds으로 적합하여 이와 같이 총 25개(기준 시나리오 1개 + 혼합 4개 + 동질 20개) 시나리오를 동일 조건(반복수 =10, 15분 집계 등)에서 수행하고, 교통량에 대해서 증감을 평가한다.
연구결과
본 장에서는 연구방법론에서 정산된 기준 시나리오(HDV-only)를 기준으로, 총 25개 시나리오의 결과를 비교·분석하였다. 모든 결과는 기본구간(제한속도 100km/h, 120km/h)에서 차로당 교통류율(pcphpl)을 중심으로 제시하였으며 Figure 3와 같이 제시하였다. 또한, 기준 시나리오 대비 용량 보정계수(CAF)로 정규화하여 해석하였다. 기준 시나리오의 용량은 100km/h 대표 구간에서 약 2,212pcphpl, 120km/h 대표 구간에서 약 2,284 pcphpl로 정산되었다.
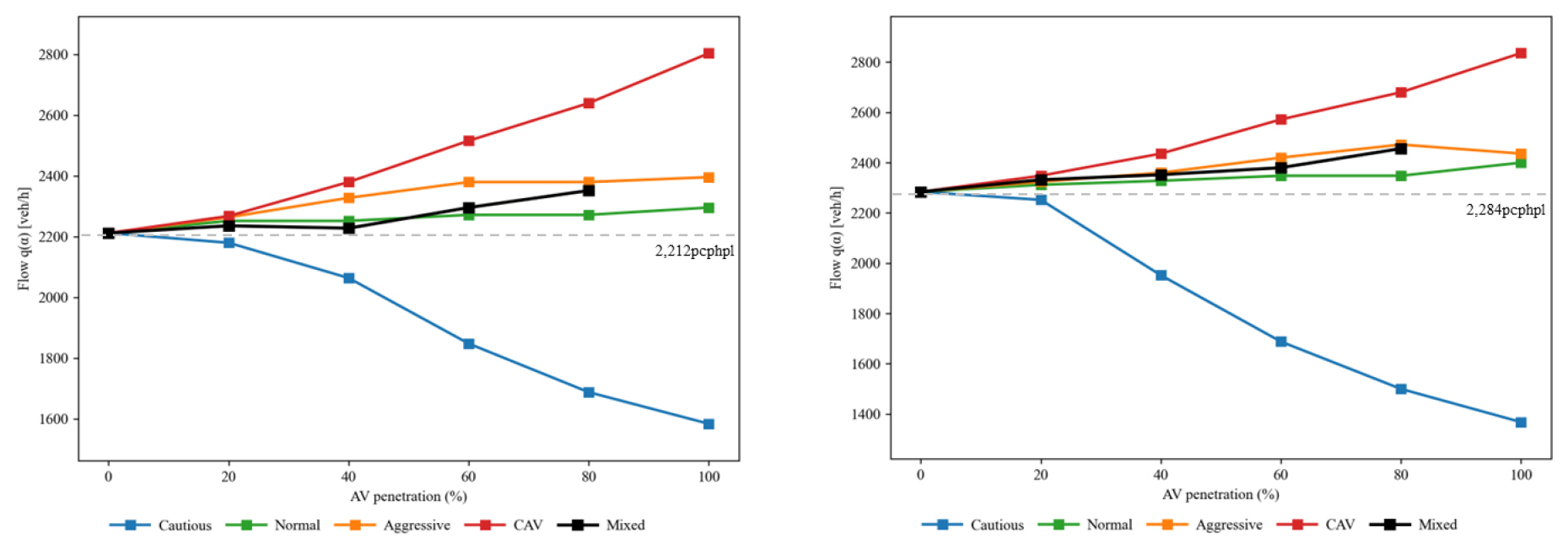
100km/h 대표 구간에서 동일 조건에서 행태를 고정한 동질행태군만 비교하면, CAV는 혼입률 증가에 따라 용량이 뚜렷하게 지속적으로 상승하여 𝛼=1.0에서 2,804 pcphpl(𝜅=1.268)로 최대 수준에 도달하였다. Aggressive 역시 혼입률 증가에 따라 용량이 완만하게 상승하여 𝛼=1.0에서 2,396pcphpl(𝜅=1.083)로 기준 시나리오 대비 약 8% 내외의 용량 향상이 관찰되었다. Normal은 전체적으로 완만한 증가 곡선을 형성하여, 𝛼=1.0에서 2,296 pcphpl(𝜅=1.038)로 약 4% 수준의 용량 개선을 보였으며, 𝛼=0.6~0.8 구간에서는 비교적 평탄하게 유지되었다. 반대로 Cautious는 혼입률이 높아질수록 일관되게 감소해 𝛼=1.0에서 1,584 pcphpl(𝜅=0.716)까지 떨어졌다. 이러한 감소 경향은 Cautious 행태가 다른 행태에 비해 원하는 차두시간과 최소추종간격을 크게, 차로변경 조건을 보수적으로 설정한 것과 직접적으로 연관된다. 혼입률이 증가할수록 동일 단면을 통과하는 차량 집단에서 긴 차두시간을 유지하려는 차량의 비중이 커지며, 이들은 선행차량과의 간격을 적극적으로 줄이지 않고 차로변경 또한 지연시키기 때문에 단위시간당 통과가능한 교통량이 구조적으로 감소하게 된다. 따라서 Cautious 혼입은 안전성과 주행안정성 측면에서는 급감속·충격을 줄이는 이점이 있으나, 본 연구에서 정의한 파라미터 범위에서는 긴 차두시간에 따른 공간 활용 비효율이 더 크게 작용하여, 혼입률이 높아질수록 용량이 일관되게 감소하는 결과가 나타난 것으로 해석된다.
혼합행태 시나리오는 정책적 보급 시나리오를 반영한 합성 조합으로서 동질행태군(행태 고정)의 행태 자체 효과와는 해석 축이 다르다. 100km/h 대표 구간에서 혼합행태 시나리오의 경우 𝛼=0.6에서 2,296 pcphpl(𝜅=1.038)까지 개선되었고 𝛼=0.8에서도 2,352 pcphpl(𝜅=1.063) 수준까지 개선되었으며, 절대값 기준으로는 CAV 동질행태군의 최대치에는 미치지 못하나 Normal·Aggressive 행태와 유사한 중간 수준의 용량 개선 효과를 보였다. 혼합행태 곡선은 본 연구 범위에서 동질행태군 곡선(특히 CAV 상한과 Cautious 하한) 사이에 놓이는 경험적 상·하한의 내부에 위치하며, 현실적 보급 시나리오에서 기대할 수 있는 용량 개선의 범위로 나타내는 것으로 해석하는 것이 적절하다(Chen et al., 2017).
한편 100km/h 구간에서 Aggressive와 Normal을 비교하면, 혼입률 전 구간에서 Aggressive의 CAF가 Normal을 상회하긴 하지만 그 격차는 최대 약 4~5% 수준에 그쳤다. 이는 짧은 차두시간 자체가 곧바로 유효 용량 증가로 이어지지 않음을 시사한다. Aggressive 파라미터는 차두시간과 차로변경 임계값을 줄이는 대신 속도·간격 변동성(가감속·jerk·headway 진동)과 차로변경 충돌 가능성을 키워, 포화흐름 근방에서의 교란을 확대시키는 효과를 수반한다. 반대로 Normal 행태는 차두시간 단축의 이득과 변동성 억제가 비교적 균형을 이루어, 집단 수준에서는 안정성이 유지된 상태에서 완만한 용량 개선을 가져오는 것으로 해석할 수 있다. 특히 100km/h 기본구간처럼 속도 분포 상·하한이 좁고 차로변경 빈도가 높은 환경에서는, 과도한 공격성이 미세한 교란의 누적으로 이어져 정점 전·후의 효율 손실을 유발할 수 있으며, 이는 선행연구에서 보고된 공격적 운전이 교통류 안전성을 저해하여 장기적으로 용량을 감소시킨다는 결과와도 맥락을 같이 한다(Chen et al., 2014).
120km/h 대표 구간에서는 CAV의 용량 개선 효과가 100km/h와 유사한 패턴을 보이되, 고속주행 특성이 더해지면서 CAF 곡선이 다소 완만하게 형성되었다. 기준 시나리오에서 약 2,284 pcphpl이었던 용량은 CAV 행태에서 𝛼=1.0에서 2,836 pcphpl(𝜅=1.242)까지 증가하여 약 24% 수준의 개선 효과가 나타났다. Aggressive는 혼입률 증가에 따라 𝛼=0.8까지는 2,472 pcphpl(𝜅=1.082)로 꾸준히 상승하였으나, 𝛼=1.0에서는 2,436 pcphpl(𝜅=1.067)로 소폭 하락하며 정점이 𝛼=0.8 부근에서 형성되는 양상을 보였다, Normal 행태는 𝛼=1.0에서 2,400 pcphpl(𝜅=1.051)로 100km/h 구간보다 다소 큰 개선폭을 보였으나, 전반적으로 완만한 증가곡선으로 정리된다. Cautious는 120km/h에서도 혼입률이 증가할수록 용량이 일관되게 감소하여, 𝛼=1.0에서 1,368 pcphpl(𝜅=0.599)까지 떨어져 기준 시나리오 대비 약 40% 수준의 용량 손실이 발생하였다. 고속구간에서는 긴 차두시간을 유이자흔 보수적 AV가 차로간 속도차와 추월 시도 증가에 따른 미세한 교란을 유발하기 쉬우며, 이는 상류 대열에서 부분적인 병목을 만들어 전체 용량을 제한하는 방향으로 작용한 것으로 판단된다(Talebpour and Mahmassani, 2016; Patiño et al., 2023).
120km/h 구간의 혼합행태 시나리오는 𝛼=0.8에서 2,456 pcphpl(𝜅=1.075)까지 개선되어, CAV보다는 낮고 Aggressive·Normal 동질행태군과 유사한 중간 수준을 형성하였다. 120km/h에서도 혼합행태 곡선은 CAV와 Cautious 동질행태군의 경험적 상·하한 내부에 놓이며, 고속구간에서도 현실적인 보급 조합에서 기대할 수 있는 용량 개선 범위가 CAV 상한과 Cautious 하한 사이의 완충영역에서 형성된다는 점을 확인할 수 있다. 또한 전체적으로 Aggressive의 CAF가 Normal보다 다소 높게 유지되긴 하지만, 고속구간에서는 차로변경 1회당 손실시간과 속도진동 파급 길이가 증가하기 때문에, Aggressive가 제공하는 개별 차량 수준의 짧은 간격 이득이 집단 수준의 교란비용(급감속 파동·차로 간 속도차 확대·차간시간 변동성 증가)에 의해 상당 부분 상쇄될 수 있다. 반대로 Normal은 속도·간격의 군집균질화를 촉진하여 평형 상태의 유지 시간을 늘리고, 그 결과 정점 근방에서의 병목 발생을 지연시키는 효과가 나타난 것으로 해석된다(Ma et al., 2021).
결론
본 연구는 실측 기반 대표 기본구간을 선정한 뒤, 속도–교통량 적합과 RMSE·MAE·Bias를 활용한 규칙으로 시뮬레이션과 실데이터를 정합하고, 혼입률과 주행행태 요인을 분리하여 용량 변화를 정량화함으로써 CAF 형태의 실무 적용값을 제시하였다. 업데이트된 대표 구간 기준 분석 결과, 100·120km/h 모두에서 CAV는 혼입률 증가에 따라 CAF가 가장 크게 상승하는 형태로 나타났으며, 기준 시나리오 대비 최대 약 27%, 24% 수준까지 용량이 증가하였다. Cautious는 전 구간에서 일관된 감소를 보였으며, α=1.0에서 100km/h 구간의 CAF는 약 0.72, 120km/h 구간은 약 0.60으로 떨어져, 보수적 주행행태가 고속도로 기본구간의 용량을 크게 저하시킬 수 있음을 확인하였다. Normal은 변동성 억제를 통한 집단 안정화 효과로 중간 수준의 개선이 관찰되었고(100km/h에서 α=1.0 기준 CAF=1.04, 120km/h에서 CAF=1.05), Aggressive는 개별 차량 간격 단축으로 인해 CAF가 Normal보다 높은 수준으로 유지되었으나, 100km/h에서 약 8%, 120km/h에서 약 7% 수준으로 그 개선폭이 CAV에 비해서는 제한적인 것으로 나타났다. 혼합행태 시나리오는 현실적으로 나타날 수 있는 정책적 조합으로서 CAV 상한과 Cautious 하한 사이에서 일관된 기대치 범위를 형성하였고, α=0.8 기준으로 100km/h에서 CAF=1.06, 120km/h에서 CAF=1.08 수준을 보여, 실제 혼합교통류에서 기대 가능한 용량 개선폭을 제시한다는 점에서 의미가 있다. 이러한 결과는 도로용량편람(2013)의 HDV 중심 프레임에 AV 혼입 효과를 CAF로 접목할 수 있는 정량적 근거를 제공한다.
나아가 본 연구에서 관찰된 결과는 CAV 혼입률이 높아지면 용량이 단순히 선형적으로 늘어날 것이라는 직관적 기대만으로는 실제 혼합교통류를 설명하기 어렵다는 점을 보여준다. CAV의 경우 혼입률이 높아질수록 CAF가 비선형적으로 증가하면서도, Aggressive·Normal과 같은 인간운전 행태는 혼입률 증가에 따라 완만한 개선 또는 포화 양상을 보이며, Cautious 행태는 혼입률이 높아질수록 오히려 CAF가 크게 감소하는 등 행태군별 CAF 곡선의 기울기와 곡률이 상이하게 나타났다. 이는 주행행태, 운영전략, 혼입률 조합에 따라 용량이 개선되기도 하지만 약화될 수 있다는 선행연구의 결과와도 맥락을 같이 한다. 따라서 AV/CAV 도입 효과를 단순히 용량 증분으로 가정하는 수준을 넘어, 행태군과 혼입률, 시설유형을 명시적으로 반영한 CAF를 도로용량편람 체계 내에서 재정의·제시하는 작업이 필수적이며, 본 연구에서는 그 첫 단계로서 국내 고속도로 기본구간에 대한 정량적 근거를 제공한다는 점에서 의의가 있다.
또한, 본 연구에서 제시한 CAF는 향후 정책·운영적 측면에서 다양한 방법으로 사용될 수 있을 것으로 판단된다. (i) CAV 혼입을 전제로 한 교통운영 전략 설계의 기준값으로 활용될 수 있다. CAV 주행행태에서 관찰된 CAF 상향 구간은, 해당 혼입률과 행태 조합에서 도로용량편람의 기본구간 용량·서비스 교통류율을 얼마나 상향 조정할 수 있는지에 대한 상한선을 제공하여, 중·장기적으로 동일 기하구조에서 허용 가능한 설계교통량을 재평가하거나, 고속도로 확장 시점을 재조정하는 계획·투자 의사결정에 직접 연결될 수 있다. (ii) 차로관리 전략 측면에서, 혼합교통류에서 전용차로를 도입했을 때 용량·안정성 측면에서의 잠재적 이득이 발생할 수 있음을 보여준다. 특히 Cautious 혼입률이 높을 경우 전체 CAF가 크게 떨어지므로, CAV 중심 전용차로를 통해 집단을 분리하거나, 보수적 행태군을 특정 차로나 시간대에 분산시키는 전략이 유효할 수 있다. (iii) 속도관리·혼잡관리 전략과 결합하여 운영정책을 구체화하는 데에도 활용될 수 있다. 보수적 주행 파라미터를 가진 AV가 일정 비율 이하로 혼입될 때 오히려 효율을 떨어뜨릴 수 있으므로, 고속도로에서 가변제한속도, 차로 통제, 램프 미터링 등과 연계하여 초기 보급기에 Cautious 수준이 높은 차량군을 공간·시간적으로 분산시키는 방법 등을 검토할 수 있다.
다만 본 연구는 (i) 다양한 AV/CAV 수준에 대한 모수 보정에서 Wiedemann 99 가정에 일부 의존하였고, (ii) 분석 대상을 기본구간으로 한정하였으며, (iii) 중차량·차로폭·종단경사 등 기존 보정계수의 정합성 검토가 추가로 요구된다는 한계를 가진다. 이러한 한계를 보완하기 위해, 향후 충분한 현장 궤적·VDS·영상 자료가 확보되면 본 정합·평가 절차를 동일하게 적용하여 CAF를 재추정·고도화하고, 합류·분류 등 다양한 시설유형에 대해 효과지표를 혼입률 함수로 보정한 CAF를 산출·검증할 필요가 있다.
