

서론
기존문헌고찰
1. 자율주행 및 군집주행에 관한 연구
2. 주행 시뮬레이션을 통한 운전자 행동 분석에 관한 연구
3. 기존 연구와의 차별점
분석 방법
1. 주행 시뮬레이션 실험
2. NASA-TLX기반 운전자 작업부하
3. 분산분석
4. 다변량 분산분석
분석 결과
1. 주행 시뮬레이션기반 운전자 주행특성 분석
2. NASA-TLX기반 운전자 작업부하 분석
결론 및 한계점
서론
최근 지능형 교통시스템 기술과 자동차 기술이 획기적으로 발전하며 이들이 결합되어 자율주행자동차가 현실화 되고 있으며, 자율주행차의 세계 시장 규모는 2025년 전 세계 차량 시장의 약 4%에서 2030년 약 41%, 2035년 75%로 향후 20년간 점차 시장에서 장악력을 얻을 것으로 전망하고 있다(Navigant Research, 2013). 이와 같이 자율주행차에 대한 시장 규모가 커짐에 따라 자율주행기술이 보편화되고 있으나, 자율주행자동차의 시장 점유율(Market Penetration Rate, MPR)이 100%에 달하기 전에는 자율주행차와 비자율주행차가 혼재된 혼합교통류가 발생하게 되며, 자율주행차와 비자율주행차 간의 상호작용이 발생하게 될 것이다.
특히나 화물 산업 분야에서 제기되고 있는 인력부족 및 대기오염 등의 문제에 대한 대안으로 자율군집주행에 대한 관심이 증대되고 있으며, 이와 관련한 연구가 꾸준히 수행되어지고 있다(Lee and Oh, 2017; Seraj et al., 2018; Jo et al., 2019; Lee et al., 2021). 그러나 혼합교통류에서 군집주행이 존재하는 경우, 비자율차량의 운전자는 주변차량이 일반적인 형태로 주행하지 않음을 인지하게 되어 기존의 주행행태와는 다른 행태를 보일 수 있으며(Gouy et al., 2014), 이에 따라 자율군집차량과 상호작용하는 비자율차량의 주행 행태 및 교통류에 대한 분석이 꾸준히 수행되어지고 있다. 그러나, 기존 연구들은 주로 고속도로 본선부에 대해 분석이 수행되어지고 있으며(Lee and Oh, 2017; Lee et al., 2018a; Jo et al., 2019), 고속도로 유입 및 유출부와 같이 차량 간의 상충이 빈번히 발생하는 구간에 대한 고려가 필요하다.
또한 기존 연구에서는 자율차량이 새롭게 지정된 전용차로에서 주행하는 경우가 빈번하다. 그러나 자율차량의 시장 점유율이 일정 수치에 달하기 이전에는 자율주행 전용차로를 설치하는 것에 어려움이 있으며, 전용차로가 설치되기 이전에는 차량은 기존에 존재하는 통행원칙에 따라 주행하게 될 것이다.
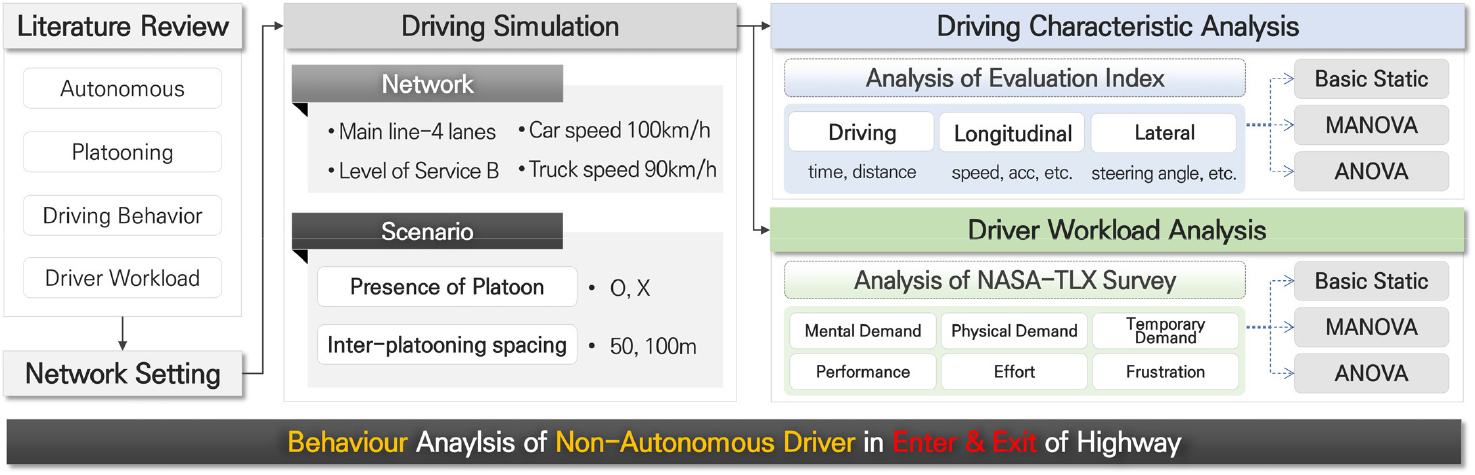
따라서 본 연구에서는 화물차로 구성된 자율군집주행이 지정차로제에 따라 주행하고 있는 상황에서 고속도로 진출입하는 비자율차량에 대해 주행 실험을 수행하고, 물리적 및 심리적인 관점에서 군집 유무에 따른 비자율주행차의 행태 변화를 분석하고자 하며, 연구 흐름도는 Figure 1과 같다.
기존문헌고찰
1. 자율주행 및 군집주행에 관한 연구
자율주행 기술의 상용화가 이루어짐에 따라 자율주행차량에 대한 연구가 빈번히 수행되고 있다. 최근 연구에서 자율주행환경에서 도로교통시스템의 운영효율성과 안전성을 증대시키기 위한 교통운영관리의 필요성을 말하며, 자율주행차와 비자율주행차가 혼합된 교통류에서 교통운영을 위한 자율주행차 주행관리 전략을 설계하고 평가하는 연구를 수행하였다. 이를 위해 주행 시뮬레이션을 통해 혼합교통류에서 비자율주행차의 주행 특성을 파악하고 교통운영 관리 전략 수립의 필요성을 확인하였으며, 자율협력주행 교통운영관리 전략 평가방법론을 개발하고 미시 교통류 시뮬레이션인 VISSIM을 통해 교통운영관리 전략을 평가하였다(Lee et al., 2018a, 2019; Lee, 2020). Jeong et al.(2020)은 자율주행차와 비자율주행차 간의 마찰을 최소화하기 위하여 버스전용차로를 이용한 자율주행차 전용차로 운영이 실현될 가능성이 높으며, 이에 따라 VISSIM을 활용하여 도로환경에 따른 유입 영향권의 안전성을 고려한 전용차로 영향권 설계 기준을 제시하였다. Faisal et al.(2020)은 자율주행 차량 연구 동향, 패턴 및 상호 연결을 잘 이해하기 위해 자율주행차에 대한 연구를 분석하고, 연구에 미치는 영향을 반영하였다.
이와 더불어 안전성 향상, 연료 절약 등의 경제적 기대효과로 인해 군집주행에 대한 관심이 증대하고 있다. Lee and Oh(2017)는 군집주행은 주변의 비자율주행차의 주행행태에 영향을 미칠 수 있기 때문에 주행 시뮬레이션을 이용하여 군집주행환경에서 비자율주행차의 차로변경행태를 분석하였다. Suh et al.(2017)은 주행 시뮬레이션을 통해 군집주행환경에서 차량 추종하는 비자율주행차 운전자의 작업부하 및 차량거동을 분석하였다. Lee and Oh(2018)는 고속도로 유입연결로 구간에서 교통류 퍼포먼스를 극대화 시킬 수 있는 화물차 군집 운영전략을 수립할 수 있는 방안을 제시하였으며, VISSIM을 이용하여 군집주행이 교통류에 미치는 영향을 분석하였다. Lee et al.(2018b)은 주행 시뮬레이션을 활용하여 자율군집주행 환경에서 비자율주행차의 차선 변경 특성을 분석하였다. Seraj et al.(2018)은 혼합 교통류에서 교통 이동성, 안전 및 환경성을 고려한 미시적 차량 추종 알고리즘을 제안하고, 군집 운영 파라미터가 교통 흐름에 미치는 영향을 탐구하였다. Jo et al.(2018a)은 화물차 군집주행이 가능한 고속도로 구간을 선정하는데 초점을 맞추어 공공성 측면에서 평가항목을 제시하고 그 효과가 가장 클 것으로 예상되는 구간의 우선순위를 도출하였다. 또한 Jo et al.(2018b)은 교통운영관리 측면에서 고속도로에 도입되는 화물차 군집주행이 도로 용량에 미치는 영향 분석하기 위해 VISSIM을 통해 일반차량과 군집차량이 혼재된 상황을 구현하고 용량 증대를 최대로 유도할 수 있는 군집 운영전략을 제시하였다. Jo et al.(2019)은 화물차 군집주행으로 인해 발생할 수 있는 이동 시간 감소 편익을 정량화하기 위해 VISSIM과 교통 운영 소프트웨어인 TransCAD를 활용하여 분석을 수행하였다. Lee et al.(2021)은 VISSIM을 기반으로 화물차 군집주행의 MPR로 인한 교통 이동성 및 안전성 분석을 위한 프레임워크를 제안하였다. 본 연구에서는 군집주행과 관련한 기존 연구에서 군집 운영에 대해 중점적으로 고찰을 수행하였으며, 군집 운영 파라미터는 Figure 2와 같이 말하며(Lee, 2020) 기존 연구에서 활용된 값은 Table 1과 같다.

Table 1.
Platooning parameter
| Year | Author | Method |
Intra-platooning spacing |
Inter-platooning spacing | Platoon size |
| 2021 | Lee et al. | Traffic simulation | 5m | 50m | 2, 4, 6, 8, 10 |
| 2020 | Lee | Traffic simulation | 4m | 100m | 4, 8, 12 |
| 2019 | Papadoulis et al. | Traffic simulation | 0.6s | - | No limit |
| 2018b | Lee et al. | Traffic simulation | 10m | 50, 100m | 4, 6, 8, 10 |
| 2018b | Jo et al. | Traffic simulation | 4, 6, 8, 10m | 50, 100m | 2, 3, 4, 5 |
| 2018 | Li et al. | Traffic simulation | 0.6s | - | 10 |
| 2018 | Seraj et al. | Traffic simulation | 0.5, 0.75, 1.0, 1.25s | 2, 4, 6, 8s | 3, 4, 5, 6 |
| 2017 | Lee and Oh | Driving simulation | 4m | 100m | 4, 8, 12 |
| 2017 | Suh et al. | Driving simulation | 4m | 100m | 4, 8, 12 |
| 2017 | Caltrans | Driving vehicle test | 0.6, 0.9, 1.2, 1.5s | - | 3 |
2. 주행 시뮬레이션을 통한 운전자 행동 분석에 관한 연구
도로 상황 및 선형에 따른 차량거동 변화를 평가하는 주요 지표를 검토하였으며 Table 2와 같다. 기존 연구에서는 주로 차량거동에 대해 종방향 및 횡방향 거동으로 구분하여 도로 선형 및 상황이 각 거동에 미치는 영향에 대해 분석하였다. Wang et al.(2019)은 복잡한 정렬을 가진 도로의 운전자 감속과 가속에 대한 종합적인 연구를 수행하기 위해 종방향 가감속도를 측정했으며 감속, 근접 충돌 및 가속으로 분류하였다. 이를 통해 기하학적 도로 정렬과 개별 운전자의 가감속 행동 사이의 관계를 분석하였다. Barendswaard et al.(2019)은 속도 및 도로 곡선반경 변화가 차선 내 치우침에 미치는 영향을 분석하기 위해 주행 시뮬레이션을 이용하여 속도와 곡선반경으로 구성된 시나리오에 대해 실험을 수행하였다. Liu and Xu(2019)는 도로 곡선반경이 운전자의 속도 인식에 미치는 영향을 분석하기 위해 주행 시뮬레이터를 이용하여 곡선반이 상이한 구간에서 실험을 수행하였다. Yuan et al.(2019)은 주행 시뮬레이션을 통해 진입과 진출 사이의 직조 길이, 교통 조건 및 운전자 특성이 운전자의 차선 변경 행동에 미치는 영향을 조사하였다. Zheng et al.(2018)은 반물리 시물레이터인 KMTDS와 시나리오 설계 프로그램인 VS-Design을 이용하여 고속도로 경관이 주행 속도 및 반응 시간과 같은 인지 능력에 미치는 영향을 분석하였다. Kim(2018)은 Multi-agent 주행 시뮬레이터를 이용하여 추종 구간, 앞지르기 구간, 추월 후 구간에서 일반운전과 상이한 공격운전에 대한 주행특성을 파악하고 공격운전 검지를 위한 분류 분석을 수행하였다. Park et al.(2018)은 주행 시뮬레이션을 통해 종방향 자율주행 환경에서 ACC(Adaptive Cruise Control)시스템의 운영 상황을 구현하고 jerk, peak-to-peak jerk를 통해 운전자의 안락감 및 주행안정성 분석을 수행하였다. 또한 횡방향 차량 거동의 경우 Liu et al.(2016)은 주행 시뮬레이션을 통해 횡방향 오프셋과 횡방향 가속도 결합을 네 가지 유형으로 분류하였으며, 기울기, 곡률, 길이 및 회전 방향이 차량 안정성에 큰 영향을 미친다는 것을 보여주었다.
Table 2.
Evaluation index of driving behavior
| Category | Contents | Remarks | |
|
Longitudinal behavior | Speed | Distance travelled per unit time | Liu and Xu (2019) |
| Barendswaard et al. (2019) | |||
| Acceleration | A rate of change of speed | Wang et al. (2019) | |
| Reaction time |
The time interval between the situation and the driver’s response for the first time | Zheng et al. (2018) | |
| Max-min speed |
The difference between the maximum and minimum values of the speed | Jang (2021) | |
| Bella (2015) | |||
| Jerk | A rate of change of acceleration | Park et al. (2018) | |
|
Peak-to-peak jerk (P2P jerk) |
The difference between the maximum and minimum values of the jerk | Park et al. (2018) | |
|
Lateral behavior | Steering angle |
The angle at which the steering wheel pivots when the car changes direction | Jang (2021) |
| Farahmand and Boroujerdian (2018) | |||
| Steering angle speed | A rate of change of speed over time | Jang (2021) | |
| Lane position |
Location of vehicle in lane Degree of lateral bias in the lane | Barendswaard et al. (2019) | |
| Farahmand and Boroujerdian (2018) | |||
운전자의 심리과정과 행동특성간의 상호 관계를 정량화하기 어렵기 때문에 운전자의 작업부하를 측정하는 연구가 빈번하게 수행되고 있다. Jang(2021)은 종 ‧ 횡방향 차량거동만으로 뇌파 기반의 운전자 심리 생리적 작업부하를 반영한 주행안전성 통합평가기법을 개발하였다. Oh et al.(2020)은 고속도로 본선 및 연결로, 터널구간에서 비고령운전자와 고령운전자간의 주행행태 및 작업부하를 비교 분석하였다. 이를 위해 주행 시뮬레이터를 활용하여 차량의 주행궤적과 뇌파 자료를 수집하였으며, 종방향 주행 안전성과 심리적 작업부하 평가를 수행하였다. Kim et al.(2017)은 개별 운전자의 주행패턴을 반영한 새로운 작업부하 평가지표를 도출하기 위해 ESA(Erratic Steering Velocity Area)를 제시하였으며, 군집유무에 따른 일반 비자율차 운전자의 반응행태 자료를 추출하여 NASA-TLX점수와 ESA 간의 관계를 분석하였다.
3. 기존 연구와의 차별점
기존 연구들은 주로 고속도로 본선부를 대상으로 자율주행차량과 비자율주행차량이 혼재된 교통상황에 대한 연구를 빈번히 수행하였다. 그러나 본 연구에서는 차량의 차선변경 등 차량 간의 상호작용과 주행 행태의 변화가 필연적으로 발생하는 고속도로 유출입 구간에서 군집주행하는 차량으로 인해 변화하는 비자율주행차의 주행 특성을 분석한다. 또한 자율주행 전용차로를 새롭게 설계하는 기존 연구와 달리 본 연구에서는 화물차로 구성된 자율주행차량이 기 존재하는 국내 고속도로 지정차로제에 맞추어서 주행한다는 점에서 차별성이 있다. 이와 더불어 비자율주행차 운전자의 작업부하를 정량화하여 운전자의 육체적인 주행행태 뿐만 아니라 심리적 변화를 종합적으로 반영하여 분석을 수행한다. 따라서 본 연구는 다각적인 측면에서 고속도로 유입/유출부에서 화물차로 구성된 자율군집주행으로 인한 비자율주행차량의 행태 변화를 분석할 수 있다.
분석 방법
1. 주행 시뮬레이션 실험
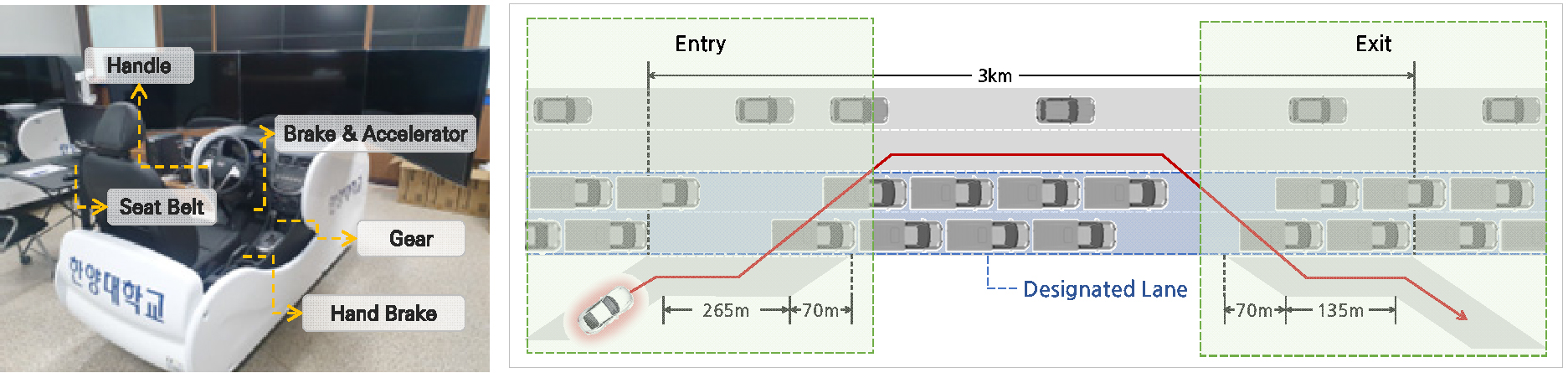
주행 시뮬레이션을 통해 비자율주행차의 주행 특성을 분석하기 위하여 UC win/Road 소프트웨어를 이용하여 시뮬레이션 내에 가상의 도로를 구축하고 Figure 3과 같은 실험 환경을 구축하였다. 각 실험자는 화물차량이 고속도로 지정차로제에 맞추어 우측 차로로 주행하는 환경에서 ‘진입→본선 주행→진출’ 단계로 도로를 주행하며, 학습효과를 배제하기 위하여 실험자는 무작위로 선정된 시나리오에 대해 실험을 수행하였다(Yan et al., 2008; Yuan et al., 2019).
실험환경은 아래 Figure 3과 같이 1차로 유입/유출부와 연결된 고속도로 본선부 편도 4차로 도로이며, 본선부 교통량은 도로용량편람에서 제시하는 고속도로의 서비스 수준(level of service, LOS) B에 따른 교통량을 적용하였다. 이 때, 불안정한 교통류인 LOS E, F상황은 군집에 따른 영향보다 교통량에 따른 영향이 클 것으로 판단하여 제외하였으며, 기존 연구에서 가장 포괄적으로 군집 운영이 적합하다고 도출된 LOS B를 적용하였다. 또한 유입/유출부에는 자율군집차량으로 인한 실험자의 영향을 분석하기 위해 실험자를 제외한 타 차량을 존재하지 않는 것으로 설정하였다. 실험 네트워크의 본선부는 총 4km이고 도로의 구조 ‧ 시설 기준에 관한 규칙 해설에서 제시된 유출입구간 영향권을 고려하여 유입과 유출부 간의 거리는 약 3km로 구성하였다. 그리고 유입 및 유출부의 가감속차로는 도로의 구조 ‧ 시설 기준에 관한 규칙 해설에 따라 가속차로 265m, 감속차로 135m, 변이구간 70m로 구축하였다. 화물차량은 모두 지정차로제에 맞추어 오른쪽 차로에서 주행을 하며, 승용차는 모두 왼쪽 차로에서 비자율주행을 한다. 승용차와 화물차의 제한속도는 고속도로 제한속도에 맞추어 각각 100km/h, 90km/h로 설정하였으며, 자율군집주행차량과 비자율주행차량 간의 V2V(vehicle to vehicle) 정보 교환이 이루어지지 않는다.
시나리오 설정을 위한 군집 운영 파라미터는 기존 연구에서 빈번히 고려되고 선정된 값을 고려하여 아래 Table 3과 같이 군집 내 간격, 군집 간 간격, 군집 크기를 설정하였다. 먼저, 군집 내 간격은 기존 연구에서 3-30m 등 다양하게 연구가 수행되었으나, 미미한 차이는 주행 시뮬레이션에서 실험자에게 미치는 영향을 구분하기 어렵기 때문에 기존 연구와 European Truck Platooning Challenge 2016에 참가한 차량 제조사 MAN에서 설정한 10m로 적용하였다(Eckhardt, 2016). 또한 군집 간 간격은 기존 연구에서 설정된 범위와 100km/h로 주행할 때의 안전거리인 100m를 참고하여 50m와 100m로 설정하였다. 마지막으로 군집 크기는 기존 연구에서 주로 10대 이하로 구성되고, 4-6대일 때 적정 운영방안으로 도출된 것을 바탕으로 4대로 구성하였다.
Table 3.
Platooning parameter and driving simulation scenario
| Scenario | Inter-platooning spacing | Intra-platooning spacing | Platoon size |
| 1 | 50m | 10m | 4 vehicles |
| 2 | 100m | 10m | 4 vehicles |
| 3 | No platoon | ||
분석 시 진입 및 진출을 가/감속차로 혹은 화물차 지정차로에서 시작점에서 종료점을 주행하는 것으로 정의하였으며, 시작점은 방향지시등 켠 지점 혹은 주행차량의 앞바퀴가 차선에 닿은 지점, 종료점은 방향지시등을 끈 지점 혹은 주행차량의 뒷바퀴가 차선을 통과한 지점으로 정의하였다. 또한 분석 시 진입 혹은 진출을 실패한 경우를 제외하고 분석을 수행하였으며, 각 시나리오별 진출입에 실패한 경우는 자율군집차량이 지나가는 동안 진출입을 하지 못한 경우 혹은 진출입 시 차량에 충돌한 경우로 정의하였다.
주행 시뮬레이션 실험은 2021년 6월 7일부터 6월 18일까지 36명의 피실험자를 대상으로 수행되었으며, 피실험자의 성별 및 연령대를 비롯하여 운전경력 등을 Table 4에 제시하였다.
Table 4.
Age and gender of participants
| Age | Gender | Total | |
| Men | Women | ||
| 20s | 14 | 14 | 28 |
| 30s | 5 | 2 | 7 |
| 40s | 1 | 0 | 1 |
| Total | 20 | 16 | 36 |
2. NASA-TLX기반 운전자 작업부하
NASA-TLX(Task Load Index) 설문조사는 대형 시스템에서 작업 수행 시 요구되는 작업부하 평가를 위하여 미국 항공우주국에서 개발한 방법으로, 작업부하란 어떤 과제를 수행하는 데 부과되는 주의 혹은 노력의 양으로 정의된다. NASA-TLX는 Table 5와 같이 정신적 요구량, 신체적 요구량, 시간적 요구량, 임무 성취감, 노력, 당혹감의 6가지 영역에 대한 주관적 요소를 평가하며, 가중치를 적용하여 작업부하 점수를 도출할 수 있다(Jung et al., 2006; Kim et al., 2010; Lee, 2020).
Table 5.
NASA-TLX survey
본 연구에서는 진입 및 진출에 따라 평가항목별 각 1문항씩 6문항으로 설문지를 구성하였으며, 군집주행이 없는 현실의 상황과 비교하여 발생한 부하를 체크하도록 진행하였다. 설문 점수는 50점을 ‘보통이다’로 설정하여 현실의 상황과 동일함을 나타내며, 0-100점까지 10점 척도로 구분하여 점수가 높을수록 작업부하가 커짐을 의미한다.
3. 분산분석
분산분석(Analysis of Variance, ANOVA)은 셋 이상의 모집단에 대한 평균검정을 위해 사용되며, F-검정을 사용하여 평균의 동질성을 통계적으로 검정한다. 일반적으로 귀무가설(H0)은 ‘모든 집단의 평균은 같다’이며, 대립가설(H1)은 ‘적어도 하나의 집단의 평균은 다르다’ 이다. 분산분석은 독립성, 등분산성, 정규성의 3가지 가정을 충족해야 하며, t-test 절차의 연장선으로 간주할 수 있다. 특히 다수 집단 비교에서 t-test를 여러 번 사용하면 다중검정문제가 발생하여 제 1종 오류가 증가하게 되어 이를 보완하기 위해 분산분석이 사용되어지고 있다. 이 때, 제 1종 오류란 귀무가설이 실제로 참이지만, 귀무가설을 기각하는 오류를 말한다.
분산분석 검정을 위해 사용되는 F-통계량은 Equation 1을 통해 계산된 집단 간 분산(variance between group)과 집단 내 분산(variance within group)의 제곱합(sum of square, SS)의 비율로써, Equation 2와 같이 나타낸다. 이 때, 분산은 산포의 측정치 또는 데이터가 평균에서부터 얼마나 산재되어 있는지를 나타내는 수치이다.
여기서, : Mean Square, 제곱합을 자유도로 나눈 값
: Sum of Square, 제곱합
4. 다변량 분산분석
다변량 분산분석(Multivariate Analysis of Variance, MANOVA)은 두 개 이상의 종속변수가 있다는 점을 제외하고는 분산분석과 유사하지만, 각 종속 변수를 개별로 검사하였을 때 탐지되지 않았을 수 있는 집단 간의 결합된 차이를 밝힐 수 있어 사용된다. 또한 종속변수 간의 상관관계가 있을 때 분산분석을 수차례 시행할 경우 제 1종 오류의 발생 가능성이 커질 수 있기 때문에 다변량 분산분석을 수행하는 것이 바람직하다(Lee and Choi, 2015). 다변량 분산분석에서 그룹 간 차이의 유의성을 확인하는 4가지 통계량이 있으며, Pillai’s trace, Wilks’ lambda, Hotelling-Lawley trace, Roy’s greatest root을 말한다. 이 중 Pillai의 트레이스는 가장 빈번하게 사용되며, 표본크기가 작거나 공분산이 동일하지 않을 경우 혹은 집단의 크기에 차이가 있을 경우 사용할 수 있다. 또한 통계적 검증력이 크지만 제 1종 오류의 가능성이 높다는 특징이 있어, 본 연구에서는 4가지 통계량을 모두 고려하여 결과를 분석하였다.
분석 결과
1. 주행 시뮬레이션기반 운전자 주행특성 분석
1) 효과평가지표
기존문헌 고찰을 통해 운전자 주행행태를 분석하기 위해 사용된 효과평가 지표를 검토하였으며, 주행, 종방향 및 횡방향 차량거동에 대한 평가지표를 아래 Table 6과 같이 총 19가지로 선정하였다. 이 때 본 연구에서 고려한 상대적 검지기법인 EDI(erratic driving index)는 일부 변수별로 임계값을 적용하여 임계값을 초과하는 영역의 면적을 산출하여, 평균적인 운전행태에서 얼마나 벗어나는지를 파악할 수 있다(Kim, 2018). 19가지 효과평가지표 중 속도의 평균을 제외한 나머지 평가지표는 작을수록 좋은 것으로 평가하였으며, 속도의 경우 클수록 좋은 것으로 평가하였다.
Table 6.
Evaluation index of driving simulator
2) 분석결과
비자율차량이 고속도로 본선부에 진출입 할 때, 주행, 종방향, 횡방향 효과평가지표에 대해 시나리오 간의 통계적 유의미한 차이를 판단하기 위해서 신뢰수준 95%에서 분산 분석을 수행하였으며 그 결과는 Table 7과 같다. 그 결과, 진입 시 속도의 평균을 제외한 모든 종방향 효과평가지표는 시나리오 간의 유의한 차이를 보이는 것으로 나타났으며, 진출 시에는 주행 효과평가지표에서 시나리오 간의 유의미한 차이를 보인다. 그러나 횡방향 행태는 진입과 진출에서 모두 유의한 결과가 나오지 않았다. 이는 진입 시 군집 차량의 유무 혹은 군집 간 간격에 의해 종방향 행태가 영향을 받으며, 진출 시에는 주행 행태가 영향을 받음을 나타낸다.
Table 7.
ANOVA results for driving characteristics
이러한 통계적 유의미한 차이가 군집 유무 혹은 군집 간 간격 중 어느 차이에서 기인하였는지 확인하기 위해 95% 신뢰수준에서 사후검정을 수행하였다. 먼저 진입의 경우, 분산 분석을 통해 유의한 차이가 존재한 종방향 효과평가지표 10가지 모두 시나리오 1번과 3번 간의 차이에서 발생한 것으로 나타났다. 이를 통해 군집이 존재하는 경우 군집 간 간격이 좁은 경우에는 진입하는 차량의 종방향 행태에 영향을 미침을 말한다. 또한 진출 시, 소요 거리는 시나리오 1번이 2, 3번과 유의한 차이가 존재하고, 소요 시간은 시나리오 1번과 3번 간의 차이가 유의한 것으로 나타났다. 이는 군집 유무 및 군집 간 간격이 모두 진출하는 차량의 주행 행태에 영향을 미치지만, 군집 간 간격이 좁을 경우 부정적인 영향이 증가하는 것으로 해석된다.
분산분석을 통해 탐지되지 못한 종속변수 집단 간의 결합된 차이를 분석하기 위해 다변량 분산분석을 수행하였으며, Table 8과 같다. 주행, 종방향, 횡방향 지표는 각 효과평가지표 그룹들 간의 상관관계가 0.4-0.9로 다변량 상관분석을 하기에 바람직하여, 3가지 그룹으로 구분하여 시나이고 간 차이의 유의성을 95% 신뢰수준에서 확인하였다. 진입 시에는 종방향 효과평가지표 그룹만이 4가지 통계량이 모두 0.05 이하로 도출되었으며, 이는 앞선 분산분석 결과와 동일하게 군집 유무와 군집 간 간격이 진입하는 차량의 종방향 행태에 복합적인 영향을 미치는 것을 뜻한다. 그러나 진출의 경우에는 주행 그룹과 종방향 그룹에서 일부 통계량에서 유의한 차이가 존재하는 것으로 나타났으나, Roy의 최대근과 Hotelling의 트레이스는 가정을 엄격히 충족시킬 때 주로 사용하는 통계량으로 통계량에 따라 귀무가설의 기각 여부가 변화한 것은 이러한 통계적 특성이 반영된 것으로 판단된다. 이에 따라 4가지 통계량을 모두 고려하였을 때에는 군집 유무와 군집 간 간격은 진출하는 차량에게 유의미한 영향을 미치지 않는 것으로 해석된다.
Table 8.
MANOVA results for driving characteristics
3) 소결론
주행 시뮬레이션을 통해 자율군집주행차량의 유무 및 군집운영파라미터의 변화에 따른 운전자 주행 특성을 주행, 종방향, 횡방향 지표로 구분하여 분석하였으며, 분산분석과 다변량 분산분석과 같은 다양한 통계 기법을 사용하여 상황별 통계적 유의미한 차이에 대해 도출하였다. 그 결과 진출입에 상관없이 시나리오 1번, 2번, 3번 순으로 부정적으로 도출되었다. 또한 진입 시에는 군집 차량의 유무 및 군집 간 간격에 의해서 종방향 주행 행태가 통계적으로 유의미한 영향을 받는 것으로 나타났으나, 진출하는 차량에게는 주행, 종방향, 횡방향 주행 행태 모두에서 유의한 영향을 미치지 않는 것으로 나타났다.
2. NASA-TLX기반 운전자 작업부하 분석
1) 분석결과
운전자에게 부여되는 작업부하를 분석하기 위해 NASA-TLX 설문조사를 기반으로 작업부하 점수를 도출하였으며, 진출입시 평가항목 및 작업부하가 시나리오 간의 유의한 차이가 존재하는지 확인하기 위해 95% 신뢰수준에서 분산 분석을 수행하였으며 Table 9와 같다. 진입 시에는 임무 성취감을 제외한 5가지 항목과 작업부하가 시나리오 간 차이가 존재하는 것으로 나타났으며, 진출 시에는 노력과 당혹감, 작업부하만이 유의한 차이를 가지는 것으로 도출되었다. 이를 통해 진입 시에는 군집 유무 혹은 군집 간 간격에 의해 운전자의 심리적 상태에 확연한 영향을 미치지만, 진출에서는 그 영향이 감소함을 말할 수 있다.
Table 9.
ANOVA results for driver workload
분산 분석을 통해 도출된 유의한 차이를 세부적으로 확인하기 위해 사후 검정을 수행하였다. 그 결과, 진입 시 모든 항목 및 작업부하에서 시나리오 1번과 3번 간의 차이가 유의미하며, 정신적 요구량, 신체적 요구량, 당혹감, 작업부하는 시나리오 2번과 3번 간의 차이도 유의미 한 것으로 도출되었다. 특히 당혹감의 경우 모든 시나리오 간의 유의한 차이가 존재하는 것으로 나타났다. 다음으로 진출에서는 당혹감에서 시나리오 1번과 3번 간의 차이만 95% 신뢰수준에서 유의한 것으로 나타났으며, 노력과 작업부하에서 90% 신뢰수준에서 유의하게 도출되었다. 이를 통해 진출입 시에 군집 유무는 운전자에게 심리적 영향을 미치지만 50m 차이의 군집 간 간격은 심리 상태에 통계적으로 유의한 영향을 미치지 않으며, 진입 시에는 진출에 비해 시나리오 간 차이가 뚜렷하게 나타남을 알 수 있다.
운전자 주행특성 분석과 동일하게 분산분석을 통해 탐지되지 못한 종속변수 집단 간의 결합된 차이를 분석하기 위해 다변량 분산분석을 수행하였으며, Table 10과 같다. 6가지 평가항목은 서로의 상관관계가 0.5-0.9이므로 6가지 항목을 그룹화하여 시나리오 간 차이의 유의성을 95% 신뢰수준에서 분석하였다. 그 결과, 진출입 모두에서 4가지 통계량 모두 0.05 이하로 도출되어 진출입 시 군집 차량이 진입하는 차량 운전자의 작업부하에 복합적인 영향을 미치는 것으로 나타났다.
Table 10.
MANOVA results for driver workload
2) 소결론
주행 시뮬레이션 실험을 수행함에 있어서 상황의 변화에 따라 변화하는 운전자의 심리적 상태에 대해 반영하기 위하여 NASA-TLX 설문조사를 통해 운전자 작업부하에 대해 평가하였으며, 앞선 주행 행태 분석과 동일하게 분산분석과 다변량 분산분석과 같은 통계기법을 사용하여 상황별 유의미한 변화에 대해 확인하였다. 이러한 분석을 수행한 결과, 진입 시에 군집 유무는 운전자에게 심리적 영향을 미치지만 50m 차이의 군집 간 간격은 심리 상태에 적은 영향을 미치며, 진출 시에는 진입에 비해 심리적 영향이 미미하며, 시나리오 간 차이가 상대적으로 미미하게 나타났다.
결론 및 한계점
본 연구에서는 화물차로 구성된 자율군집주행이 지정차로제에 따라 주행하고 있는 상황에서 고속도로 진출입하는 비자율주행차에 대한 주행 실험을 수행하고, 군집 유무와 군집 운영에 따른 비자율주행차의 행태 변화를 물리적 및 심리적인 관점에서 복합적으로 분석하였다.
운전자 주행 특성과 운전자 작업부하 분석 결과는 매우 유사한 양상으로 나타났으며, 군집 유무 및 군집 간 간격에 따라 육체적 및 심리적으로 복합적인 영향을 미친다. 특히, 진입 시에는 진출에 비해서 군집 유무로 인해 주행 특성과 작업부하 모두 뚜렷한 영향을 받는 것으로 도출되었으며, 군집을 운영함에 있어서 군집 간 간격을 증가시키는 것이 운전자에게 끼치는 영향을 조절할 수 있는 방안으로 고려될 수 있을 것이다. 진출의 경우에는 주행 특성은 군집 유무 및 군집 운영에 따른 변화가 두드러지게 나타나지 않았으나, 군집 유무에 의한 영향이 운전자의 작업부하에는 미치는 것으로 도출되었다.
이와 같이 화물차로 구성된 자율군집주행차와 비자율주행차가 혼재된 교통류에서 고속도로에 진출입하는 비자율차량의 주행 특성과 작업부하는 분석하고 복합적인 행태를 분석하였다. 본 연구는 자율주행차량을 위한 전용차로를 새로이 설계하는 것이 아니라 기존 통행규칙에 따라 주행하는 환경에서 분석을 수행하였다는 것과 주행 시뮬레이션 실험을 통해 운전자의 물리적, 심리적 영향을 함께 고려하였다는 점에서 의의를 가진다.
그러나 본 연구에서는 몇 가지 한계점이 존재하며, 이를 보완하기 위한 향후 과제는 다음과 같다. 첫 번째, 주행 시뮬레이션 실험을 수행할 때에 남성과 여성의 비율은 유사하지만, 20대 실험자의 비율이 타 연령대에 비해 매우 높으며, 이에 따라 실 운전경력이 적은 실험자가 많이 존재한다. 이로 인해 편중된 결과가 도출되었을 수 있으며, 향후 연구를 수행함에 있어서는 실험자의 성비뿐만 아니라 연령대 및 운전경력을 고려하여 다양한 실험자에 대한 실험 및 분석이 수행되어져야 한다.
두 번째, 본 연구에서는 실험 환경이 자율군집주행하는 차량은 모두 화물차로 구성되어 있고, 자율군집차량과 비자율주행차량 간의 정보 교환이 이루어지지 않는 등 매우 제한적인 상황에 대해 구축되어 있다. 이는 진입 및 진출 시에 자율군집주행 운영 파라미터에 따른 비자율차의 육체적, 심리적 행태를 복합적으로 분석하기 위해 의도적으로 구축한 것이지만, 실제 교통류에서 발생하는 자율주행차와 비자율주행차 간의 혼합 교통류와는 상이한 형태를 띄게 된다. 이에 따라 향후 자율군집주행과 비자율주행 간의 혼합교통류 상황에서의 비자율주행차의 행태를 분석하기 위해서는 주행 시뮬레이션 실험 환경을 구축함에 있어서 현실과 상이한 가정을 배제하기 위한 노력이 필요하다.
세 번째, 주행 시뮬레이터 실험 시간과 실험자 모집에 따른 제한이 존재하여 일부 조건과 시나리오에 대해서만 분석을 수행하였다. 먼저 실험 네트워크의 경우 본선 차로수와 교통량 등이 단일적으로 조건이 고정되어 있으나, 차선 수, 곡선반경과 같은 도로 기하구조적 특성과 다양한 서비스 수준에 대해 고려할 수 있다. 또한 군집 운영 파라미터 중 군집 간 간격과 군집 크기만을 고려하고 소수의 시나리오를 구성하였으나, 다양하고 넓은 범위의 파라미터를 고려한 실험을 수행한다면 화물차 자율군집이 비자율주행차에 미치는 영향을 세분화할 수 있을 것이다. 이와 같이 실험 환경 및 시나리오의 다양성을 고려한 연구는 향후 국내 고속도로 유출입부에서 화물차로 구성된 자율군집주행에 대해 실질적으로 적용 가능한 운영 가이드라인 수립을 위한 기초 연구로서 활용할 수 있을 것이다.
본 연구는 화물차로 구성된 자율군집주행차와 비자율주행차가 혼재된 교통류에서 고속도로에 진출입하는 비자율주행차의 주행 특성 및 작업부하를 분석하고 이를 통해 복합적인 행태를 분석하였다. 본 연구는 화물차로 구성된 자율군집주행이 지정차로제에 맞추어서 주행하는 환경에서 분석을 수행하였다는 점과 주행 시뮬레이션을 통해 비자율주행차가 진입 및 진출하는 상황에서의 운전자의 주행 특성과 운전자 작업부하를 복합적으로 고려하였다는 점에서 의의를 가진다.
