

서론
기존 운전자 작업부하 평가지표 검토
방법론
1. 연구 절차
2. ESA 개발
주행 시뮬레이션 실험 설계 및 분석결과
1. 주행 시뮬레이션 실험 구성
2. NASA-TLX 점수 산출
3. 운전자 작업부하 평가지표 도출
4. 기초통계분석
5. 차량 추종 시나리오 상관분석 결과
6. 차로 변경 시나리오 상관분석 결과
결론
서론
어떤 과제를 수행하는 데 부과되는 주의 혹은 노력의 양을 작업부하라고 하며, 개인에 따라 작업수행 능력의 차이가 있었기 때문에 개인 별 정략적인 작업부하 평가가 요구된다. 특히 운전자의 경우 심리과정과 행동특성간의 상호관계를 객관적인 수치로 정량화시키기가 매우 어렵기 때문에 운전자 요소를 계량화하기 위해서 운전자의 작업부하를 측정하는 방법이 주로 이용되고 있다. 현재까지 많은 작업부하 측정기법들이 발표되었으나 상황에 따라 어떤 기법을 사용해야 할지 선택하기 어려울 정도로 그 방법이나 특성이 다양하다. 기존의 운전자 작업부하 평가지표의 경우 성별, 연령, 운전 경력 및 평소 운전습관 등 개별운전자의 인적특성이나 주행패턴을 반영하지 않고 Steering, Offset 등을 통해 단순히 차량의 행태의 급격한 변화폭을 통해 작업부하를 측정하는 절대적 평가기법이라는 한계점이 있다. 또한, 운전자마다 체감하는 작업부하량과 작업부하를 극복하는 능력은 개인마다 차이가 있어 신뢰성 있는 작업부하 평가가 어렵다. 그러므로 기존의 운전자 작업부하 평가지표의 한계를 극복하기 위해 운전자의 주행행태 특성 및 운전습관 등을 반영한 상대적 평가기법 개념을 적용한 운전자 작업부하 평가가 필요하다. 따라서 본 연구에서는 개별 운전자의 Steering Velocity 절대값의 평균을 임계값으로 설정하고 임계값을 초과하는 영역의 면적의 합을 산출하여 운전자 작업부하를 평가하는 지표인 ESA를 개발하였다.
본 연구에서는 자율주행자동차(이하 자율차)와 비자율주행자동차(이하 비자율차)가 혼재되어 있는 경우, 자율차는 제어 알고리즘대로 움직이지만, 비자율차의 운전자는 주변 차량에 반응하여 주행하므로 비자율차 운전자의 작업부하 평가가 필요하다고 판단하였으며, ESA의 유용성을 평가하기 위해 주행 시뮬레이션 실험을 수행하였다. 따라서 자율차 비자율차가 혼재되어 있는 군집주행 환경을 주행 시뮬레이션 시나리오를 설계하고, 피실험자를 비자율차 운전자로 설정하여 비자율차 운전자가 주변 환경에 따라 어떻게 반응하는지 분석하였다. 또한 기존의 작업부하 평가지표와 ESA를 적용하여 군집주행 유무에 따른 비자율차 운전자의 작업부하를 평가하였다. 주행 시뮬레이션를 통해 군집주행환경에서 차량추종 시나리오와 차로변경 시나리오를 구축하고 자율차 시스템 보급률(Market Penetration Rate, MPR)에 따라 실험을 실시하여 시뮬레이션 데이터를 추출하였다. 그리고 주행 시뮬레이션 피실험자에게 NASA-Task Load Index (NASA-TLX) 설문조사를 실시하여 비자율차 운전자의 작업부하를 주관적으로 평가하였다(Faure et al., 2016; Zheng et al., 2012). NASA-TLX는 대형 시스템에서 작업수행 시 요구되는 작업부하 평가를 위하여 미국 항공우주국에서 개발한 방법으로 정신적 작업부하를 주관적으로 평가하는 도구이다. NASA-TLX 점수를 산출한 이후, 주행 시뮬레이션 데이터를 이용하여 기존의 개발된 작업부하 평가지표와 본 연구에서 새롭게 제시한 작업부하 평가지표에 대한 값을 산출하였다. 주행 시뮬레이션 결과 산출된 NASA-TLX 점수는 정신적 요구, 육체적 요구, 시간적 요구, 수행도, 노력 및 좌절감의 6가지 영역에 대한 주관적 요소를 평가하여 각 항목에 대한 가중치를 산정해 최종점수를 산출하였다. 산출된 NASA-TLX 점수와 작업부하 평가지표의 상관분석을 통해 작업부하 평가지표의 설명력을 평가하였다.
본 논문의 구성은 다음과 같다. 서론을 통해 연구의 배경 및 목적 등을 제시하였고, 기존의 운전자 작업부하 평가지표를 검토하여 지표의 정의, 산출방법 및 기존 지표의 한계점을 파악하였다. 방법론에서는 연구 절차에 대한 내용과 기존 작업부하 평가지표의 한계를 극복하기 위해 본 연구에서 개발한 ESA의 정의 및 산출방법을 제시하였다. 주행 시뮬레이션 실험 설계 및 분석결과를 제시하여, 기존 지표와 본 연구에서 개발한 평가지표간의 상관분석 결과를 제시하였으며, 분석 결과를 토대로 연구의 결론 및 향후과제를 제시하였다.
기존 운전자 작업부하 평가지표 검토
본 연구의 문헌 조사는 주행 시뮬레이션을 활용한 운전자 작업부하 평가지표에 대한 연구를 대상으로 실시하였다. 문헌 조사를 통해 기존의 운전자 작업부하 평가지표를 고찰하고, 기존 평가지표의 한계점을 제시하였다. Knappe et al.(2007)은 주행 시뮬레이터를 활용하여 산출 가능한 작업부하 평가지표들을 수식과 함께 정리하여 Table 1과 같이 제시하였다.
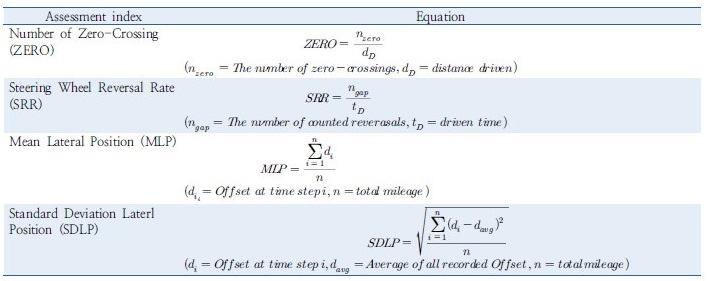
Knappe et al.(2007)은 주행 시뮬레이션 데이터를 이용하여 도출 가능한 작업부하 평가지표인 ZERO, SRR, MLP, SDLP 등을 제시하였는데, ZERO의 경우 Steering Wheel Angle 신호의 값이 반전하는 점인 Zero-Crossings 수( )의 합을 산출하여 주행거리(
)의 합을 산출하여 주행거리( )로 나눈 것을 의미하며, ZERO 측정값이 높으면 운전자의 산만함으로 인한 불안정한 주행거동을 나타낼 수 있지만, 도로의 기하구조에 영향을 많이 받는 것으로 나타났다. SRR의 경우, Steering Wheel의 반전 각도 변화가 정해진 각도보다 큰 횟수(
)로 나눈 것을 의미하며, ZERO 측정값이 높으면 운전자의 산만함으로 인한 불안정한 주행거동을 나타낼 수 있지만, 도로의 기하구조에 영향을 많이 받는 것으로 나타났다. SRR의 경우, Steering Wheel의 반전 각도 변화가 정해진 각도보다 큰 횟수( )를 주행시간(
)를 주행시간( )으로 나눈 것을 의미하며 최적의 반적 각도 변화 크기의 기준은 아직 정의되지 않았다. SRR은 ZERO와 유사하게 도로 기하구조에 영향을 많이 받는 한계점이 있다(Forsman et al., 2006). 또한 MLP의 경우, 주행하는 차량의 중심과 차로의 중심까지의 거리(
)으로 나눈 것을 의미하며 최적의 반적 각도 변화 크기의 기준은 아직 정의되지 않았다. SRR은 ZERO와 유사하게 도로 기하구조에 영향을 많이 받는 한계점이 있다(Forsman et al., 2006). 또한 MLP의 경우, 주행하는 차량의 중심과 차로의 중심까지의 거리( )의 합을 주행거리(
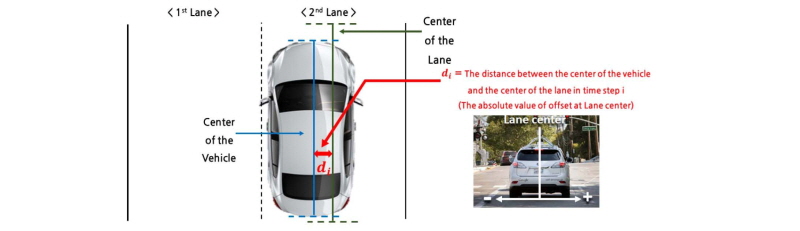
)의 합을 주행거리( )로 나눈 것을 의미하며, 속도가 올라감에 따라 운전자는 도로 중심을 향하여 MLP가 낮아지는 경향이 있는 것으로 나타났다. 마지막으로, SDLP의 경우 주행하는 차량의 중심과 차로의 중심까지의 거리와 평균값의 편차를 계산하여 주행거리로 나눈 것을 의미하며, MLP와 달리 SDLP의 측정은 운전자의 주의산만을 직접 판단할 수 있는 장점이 있다고 제시되었다. SDLP의 값이 매우 높을 때 차선을 초과할 확률이 높아지며, MLP와 SDLP를 산출시 필요한 변수인 Offset은 차량의 중심과 차로의 중심까지의 거리를 나타낸다. Offset의 개념도는 Figure 1에서 제시하였다.
)로 나눈 것을 의미하며, 속도가 올라감에 따라 운전자는 도로 중심을 향하여 MLP가 낮아지는 경향이 있는 것으로 나타났다. 마지막으로, SDLP의 경우 주행하는 차량의 중심과 차로의 중심까지의 거리와 평균값의 편차를 계산하여 주행거리로 나눈 것을 의미하며, MLP와 달리 SDLP의 측정은 운전자의 주의산만을 직접 판단할 수 있는 장점이 있다고 제시되었다. SDLP의 값이 매우 높을 때 차선을 초과할 확률이 높아지며, MLP와 SDLP를 산출시 필요한 변수인 Offset은 차량의 중심과 차로의 중심까지의 거리를 나타낸다. Offset의 개념도는 Figure 1에서 제시하였다.
Ostlund et al.(2005)은 SRR을 Steering Wheel의 반전 각도 크기에 따라 2개의 그룹으로 구분하여 비교 ․ 분석하였으며, SRR은 시각적 부하와 도로형상에 큰 영향을 받기 때문에 인지 부하의 효과를 측정하는데 한계가 있다고 제시하였다(Kountouriotis et al., 2016). 또한, Macdonald and Hoffmann(1980)은 SRR에 관한 기존 연구를 정리하였으며, 일반적으로 작업부하가 증가함에 따라 SRR이 증가할 것으로 예상되지만, 일부 연구에 의하면 작업부하가 높은 상황에서 SRR이 현저하게 감소되는 경우도 있다고 제시하였다. 이는 SRR과 작업부하간의 관계는 운전자가 작업부하를 극복할 수 있는 능력과 관련이 있는 것으로 보인다고 주장하였다. Vester et al.(2011)은 중추 신경계 약물 투여 후 SDLP를 적용하여 운전 능력을 검사하여 약물로 인한 부작용을 측정하였다. SDLP는 개인차가 매우 크기 때문에 개인을 SDLP 값으로 직접 비교하기 어려우며, 두 그룹을 비교하는 경우 그룹별로 많은 피험자가 참가해야만 통계적 유의성을 확보할 수 있다는 한계가 있다고 제시하였다.
기존의 운전자 작업부하 평가지표의 경우 단순히 차량의 Offset이나 Steering 등의 급격한 변화폭을 통해 운전자가 작업부하를 느끼는지 파악한다. 그러나, 운전자마다 느끼는 작업부하량과 작업부하를 극복하는 능력은 개인차가 존재하나, 기존 지표들은 이러한 특성을 반영하지 않아 정확한 운전자 작업부하 파악에 어려움이 있을 수 있다. 따라서, 개별 운전자의 주행행태 및 운전습관 등을 반영한 운전자 작업부하 평가지표를 도출이 필요하다.
방법론
1. 연구 절차
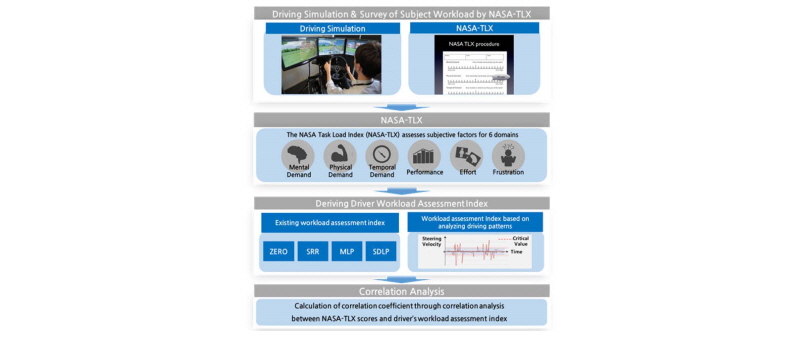
본 연구에서는 시나리오 및 MPR 별로 군집주행환경에서 비자율차 운전자의 주행 시뮬레이션 실험을 수행하고, 피실험자에게 각 시나리오에 대한 작업부하의 NASA-TLX 점수를 조사하였다. 또한, 주행 데이터를 이용하여 본 연구에서 제시한 ESA를 계산하여 기존 지표 기반으로 도출된 운전자 별 작업부하 점수와의 상관분석을 실시하였다. 본 연구의 수행과정은 Figure 2에 제시한 바와 같이 4단계로 나누어 수행하였다.
2. ESA 개발
기존 문헌 검토 결과, 기존의 운전자 작업부하 평가지표는 단순히 차량의 Offset이나 Steering 등 평가척도의 급격한 변화폭을 통해 운전자가 작업부하를 느끼는지 파악을 하는 절대적 평가기법으로 볼 수 있다. 이러한 기법들은 도로 기하구조에 영향을 많이 받고, 개인의 인적특성을 파악하기 어려워 작업부하를 적절히 평가하는데 한계가 있다. 또한, 운전자마다 느끼는 작업부하량과 작업부하를 극복하는 능력은 개인차가 있고, 기존의 작업부하 평가지표의 경우 운전자의 평소 운전습관 및 개별특성이 반영되지 않아 신뢰성 있는 운전자 작업부하가 어렵다.
따라서 개별운전자가 위험운전을 하는지, 작업부하에 영향을 받는지에 대해 정확히 파악하기 위해서는 개별 운전자의 주행행태 특성 및 운전습관 등을 반영한 상대적 평가기법이 필요하다. 본 연구에서 제시하는 새로운 운전자 작업부하 평가지표 ESA는 Steering Velocity 변수를 이용하여 도출하였다. 개별 운전자의 주행패턴을 반영하기 위한 임계값은 변수의 중앙값, 평균, 85th percentile 등 여러 가지 설정 방안이 있을 수 있지만 본 연구에서는 Steering Velocity 절대값의 평균을 임계값으로 설정하고 분석시간 동안 임계값을 초과하는 Steering Velocity 범위의 면적의 총합( )을 산출하여 총 주행시간(
)을 산출하여 총 주행시간( )으로 나누어 ESA를 도출하였다. 운전자가 외부요인에 의한 작업부하가 요구되면 차량 핸들의 조향을 평소보다 빠르게 조정하여 ESA가 높게 나타난다. ESA는 Steering Velocity 변수를 보간법을 이용하여 0.01초 단위로 데이터를 추출하고, 임계값을 벗어난 경우 Steering Velocity 값에서 임계값 이하인 영역을 제외한 면적을 산출하고, 임계값을 벗어난 범위의 면적의 총합을 산출하였다. 산출식은 Equation 1에 제시하였다.
)으로 나누어 ESA를 도출하였다. 운전자가 외부요인에 의한 작업부하가 요구되면 차량 핸들의 조향을 평소보다 빠르게 조정하여 ESA가 높게 나타난다. ESA는 Steering Velocity 변수를 보간법을 이용하여 0.01초 단위로 데이터를 추출하고, 임계값을 벗어난 경우 Steering Velocity 값에서 임계값 이하인 영역을 제외한 면적을 산출하고, 임계값을 벗어난 범위의 면적의 총합을 산출하였다. 산출식은 Equation 1에 제시하였다.
 (1)
(1)



ESA 산출 개념도는 Figure 3과 같다. Figure 3에서 제시한 ESA 산출 개념도는 본 연구에서 수행한 차로변경 시나리오 데이터 샘플을 시간에 따른 Steering Velocity 그래프로 나타내었고, 임계값을 초과하는 범위를 면적을 산출하였다. 분석구간의 길이에 따라 ESA의 크기가 상대적으로 달라질 수 있으므로 면적의 총합을 주행시간으로 나누어서 ESA를 도출한다.

주행 시뮬레이션 실험 설계 및 분석결과
1. 주행 시뮬레이션 실험 구성
본 연구에서는 주행 시뮬레이터 소프트웨어인 UC-win/Road를 이용하여 자율주행 및 군집주행환경에서의 비자율차 주행행태를 분석하였다. 주행 시뮬레이션 상에서 자율차와 비자율차는 외관으로 구분하기 어렵기 때문에 자율차의 경우 군집주행을 수행하도록 설계하여 차량의 행태를 구분하였다. 주행 시뮬레이션 실험을 통해 수집되는 데이터 항목인 주행속도, Steering, Steering Velocity, Offset 등을 이용하여 분석을 실시하였다. 피실험자는 비자율차 운전자이며, 군집주행 환경에서 주변 차량에 대한 반응 및 작업부하 정도를 분석하기 위하여 실험을 진행하였다.
주행 시뮬레이션 실험은 2016년 11월 3일부터 2016년 12월 9일까지 실시하였으며, 운전 경력 1년 이상의 고속도로 주행경험이 있는 운전자 30명을 대상으로 실험시간 1명당 약 1시간 가량 진행하였다. 30대 여성 1명과 50대 남성 1명은 시뮬레이션 환경에서 정상 주행의 어려움을 느껴, 주행 시뮬레이터 실험 부적응자로 판단되어 최종 분석에서 제외하고, 총 28명의 데이터를 이용하여 분석을 실시하였다.
주행 시뮬레이션 시나리오는 크게 2가지로 차로변경 시나리오와 차량 추종 시나리오로 분류하여 각각 자율주행차 및 군집주행차 MPR 0%, 50%, 100%를 고려해 각각 3번의 주행을 실시하였다. 차량 추종 시나리오와 차로변경 시나리오의 실험 환경은 동일하며, 공간적 범위 3km인 3차로 연속류 직선도로에서 자율차는 제한속도 100km/h로 주행하게 되며 군집의 크기는 4대, 8대, 12대로 구성하였다. 또한 군집내 자율차 간격은 4m, 군집간 간격은 제한속도 100km/h일 때 안전정지거리인 100m로 설정하였다(Tsugawa et al., 2011).
Figure 4의 차량추종 시나리오에서 피실험자는 2차로에서 주행을 시작하게 된다. 이 때 1차로, 3차로에는 MPR에 따라 비자율차 또는 자율차가 혼재되어 주행하고 있는 상황이다. 피실험자는 도착지까지 일행을 따라가야 한다는 지시를 받았으며, 전방에 있는 일행 차량을 따라 주행하였다. 3가지 MPR 별로 피실험자 1인당 3번의 주행 후 NASA-TLX를 통해 작업부하 점수를 산출하였다.

Figure 5의 차로변경 시나리오에서 2차로에서 주행을 시작하여 총 4번의 차로변경을 하게 된다. 차로변경 요청 시 운전자는 방향지시등을 켠 후 차로변경을 실시하며, 차로변경을 하기 어려운 상황에서는 차로변경을 포기할 수 있다. 이 때, 차로변경을 포기한 경우는 차로변경 실패로 간주하였다. 본 연구에서는 방향지시등을 켠 시점에서 주행차량의 앞바퀴가 변경하려고 하는 차로중앙을 통과한 지점(A, B, C 및 D)까지를 차로변경시간으로 정의하였다. 차로변경 시나리오 또한 MPR에 따라 1인당 3번의 주행 후 NASA-TLX를 통해 작업부하 점수를 산출하였다.

2. NASA-TLX 점수 산출
NASA-TLX는 작업수행 시 요구되는 작업부하 평가를 위하여 미국 항공우주국에서 개발한 설문조사 방법으로 정신적 작업부하를 주관적으로 평가하는 도구로 사용된다. 본 연구에서는 자율주행 및 군집주행환경에서 운전자의 작업부하를 평가하기 위한 목적으로 주행 시뮬레이션 실험 후 실시하였다.
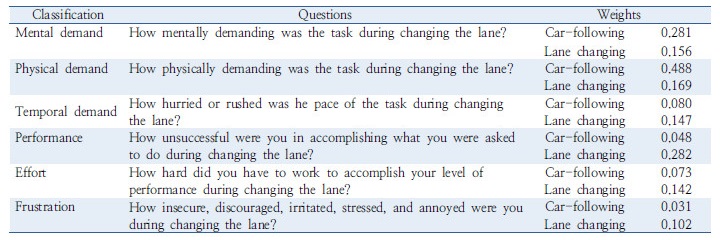
NASA-TLX는 정신적 요구(Mental Demand), 육체적 요구(Physical Demand), 시간적 요구(Temporal Demand), 수행도(Performance), 노력(Effort), 좌절감(Frustration)의 6가지 영역에 대한 주관적 요소를 평가하며, 각 요소에 대해 가중치를 적용하여 작업부하 점수를 산출한다(Kim et al., 2010). 본 연구에서는 전문가의 설문조사를 통해 가중치를 산출하는 계층화 분석법(Analytical Hierarchical Process, AHP)을 사용하였으며, 교통 전문가 10명에게 자율주행 및 군집주행환경에서 주행 시뮬레이션 시나리오에 따라 차량 추종, 차로변경 시 운전자에게 요구되는 항목 중 중요하다고 생각되는 요소를 쌍대비교를 통해 9점 척도로 조사하였다. 또한 응답의 일관성 검증을 통해 신뢰성 있는 결과만을 반영하고자 일관성 비율 값이 10% 미만으로 산출된 전문가 의견만을 반영하여 가중치를 산출하였다. 가중치 산출 결과, 차량 추종 시나리오에서는 육체적 요구가 0.488로 가장 높게 나타났고, 좌절감이 0.031이 가장 낮게 나타났다. 차로변경 시나리오에서는 임무성취감이 0.282로 가장 높으며, 좌절감이 0.102로 산출되어 시나리오별로 가중치 값이 다르게 산출되는 것으로 나타났다. 작업부하 점수는 100점 척도로 계산되며, 점수가 높을수록 자율주행 및 군집주행환경에서 비자율차 운전자의 작업부하가 크다고 볼 수 있다. NASA-TLX 설문조사 항목 별 가중치 산출결과는 Table 2에 제시하였다.
3. 운전자 작업부하 평가지표 도출
본 연구에서 새롭게 제시한 운전자 주행패턴을 반영한 작업부하 평가지표인 ESA의 경우 앞서 방법론에서 나타낸 Equation 1을 통해 산출하였다. 기존의 운전자 작업부하 평가지표의 경우 문헌 조사를 통해 정리하였으며, 주행 시뮬레이션에서 수집된 데이터를 이용하여 ZERO, SRR, MLP 및 SDLP 지표들의 값을 산출하였다.
ZERO의 경우, Steering 변수가 Zero-Crossing이 되면 Steering의 부호가 변화하므로 시간단위당 Steering의 곱이 음수가 되는 횟수( )를 산출하여 도출하였다. 산출식은 Equation 2에 제시하였다.
)를 산출하여 도출하였다. 산출식은 Equation 2에 제시하였다.
 (2)
(2)



SRR의 경우, Steering 변수의 회전방향이 반대가 되면 기울기의 부호가 변하므로, Steering 시간단위에 따른 기울기의 곱이 음수가 되는 횟수( )를 산출하여 도출하였다. 산출식은 Equation 3에 제시하였다.
)를 산출하여 도출하였다. 산출식은 Equation 3에 제시하였다.
 (3)
(3)



MLP의 경우, 주행하는 차량의 중심과 차로의 중심까지의 거리인 Offset의 절대값( )의 합을 주행거리(
)의 합을 주행거리( )로 나누어 산출하였다. 산출식은 Equation 4에 제시하였다.
)로 나누어 산출하였다. 산출식은 Equation 4에 제시하였다.
 (4)
(4)


SDLP의 경우, 주행하는 차량의 중심과 차로의 중심까지의 거리인 Offset의 절대값( )과 Offset 절대값의 평균(
)과 Offset 절대값의 평균( )의 편차를 산출하여 도출하였다. 산출식은 Equation 5에 제시하였다.
)의 편차를 산출하여 도출하였다. 산출식은 Equation 5에 제시하였다.
 (5)
(5)



4. 기초통계분석
주행 시뮬레이션 데이터를 통해 시나리오 별, 군집 유무에 따른 운전자 작업부하 평가지표의 평균을 산출하여 Table 3에 제시하였다. 분석 결과, 추종 시나리오의 경우 모든 지표가 군집 유무에 상관없이 평균의 차이를 보이지 않았고, ZERO. MLP, SDLP 및 ESA의 경우 비군집 그룹에서 오히려 평균이 낮게 나타났다. 이는 종방향 주행 시 군집주행차량에 의한 심리적 압박감이 발생하여 차로의 중심을 유지하는 경향을 나타내는 것으로 보인다.
차로변경 시나리오에서는 군집주행환경일 때 모든 운전자 작업부하 평자지표의 평균이 크게 나타났고, 이는 군집주행차량으로 인해 차로변경에 부담을 느껴 작업부하가 크게 발생하기 때문인 것으로 볼 수 있다. 특히 ESA의 경우 군집 환경이 비군집 환경에 비해 약 1.8배가량 평균이 높게 나타나 지표 중 가장 증가폭이 큰 것으로 나타났다.

5. 차량 추종 시나리오 상관분석 결과
군집 유무에 따라서 운전자의 작업부하 점수에 차이가 발생할 수 있기 때문에 군집주행 및 비군집주행에 따라 2개의 그룹으로 데이터를 분류하여 NASA-TLX 점수, 4개의 기존 운전자 작업부하 평가지표인 ZERO, SRR, MLP 및 SDLP와 ESA를 변수로 설정하여 상관분석을 실시하였다. 군집을 형성하지 않은 환경에서의 상관분석 결과, NASA-TLX 점수의 경우 ZERO, SRR, SDLP, ESA와 양의 상관관계를 가진다고 나타났고, 이 중 ESA가 상관계수 0.619로 상관관계가 가장 높았다. 비군집 그룹의 상관분석 결과는 Table 4에 제시하였다.
Table 4. Correlation analysis results of car-following scenario (without platoons)  | |
Pearson value (*) P-value less than 0.05 (**)P-value less than 0.01 | |
군집주행 환경에서의 상관분석 결과, NASA-TLX 점수의 경우 ZERO, ESA와 양의 상관관계를 가진다고 나타났고, ESA가 상관계수 0.488로 상관관계가 가장 높았다. 군집 그룹의 상관분석 결과는 Table 5에 제시하였다.
Table 5. Correlation analysis results of car-following scenario (with platoons)  | |
Pearson value (*) P-value less than 0.05 (**)P-value less than 0.01 | |
차량 추종 시나리오에서 군집 유무에 따른 상관분석 결과 모두 NASA-TLX 점수와 ESA가 가장 상관관계가 높은 것으로 분석되었다. 비군집 그룹의 경우 ESA를 제외하고 SDLP가 가장 상관관계가 높은 것으로 나타난 반면, 군집 시에는 SDLP가 유의한 상관관계를 보이지 않는 것으로 나타났다. 이는 군집주행환경 시 주변의 군집주행차량으로 인해 비자율차 운전자는 차로의 중심을 유지하며 주행하는 경향을 나타내기 때문인 것으로 판단된다.
6. 차로 변경 시나리오 상관분석 결과
차로변경 시나리오 또한 군집주행 및 비군집주행의 2개의 그룹으로 데이터를 분류하여 상관분석을 실시하였다. 군집을 형성하지 않은 환경에서의 상관분석 결과, NASA-TLX 점수의 경우 SDLP와 양의 상관관계를 가진다고 나타났다. 비군집 그룹의 상관분석 결과를 Table 6에 제시하였다.
Table 6. Correlation analysis results of lane-changing scenario (without platoons)  | |
Pearson value (*) P-value less than 0.05 (**)P-value less than 0.01 | |
차로변경 시나리오의 군집주행 환경 그룹 상관분석 결과는 Table 7에 제시하였으며, NASA-TLX 점수의 경우 ESA만 유의한 상관관계를 가지는 지표로 도출되었다.
Table 7. Correlation analysis results of lane-changing scenario (with platoons)  | |
Pearson value (*) P-value less than 0.05 (**)P-value less than 0.01 | |
차로 변경 시나리오에서 군집 유무에 따른 상관분석 결과, 군집을 형성하지 않은 환경에서는 NASA-TLX 점수와 SDLP만 유의한 상관관계를 가지는 것으로 나타났으며, 이는 차로 변경 이벤트로 인해 차량의 횡방향 움직임 변동이 크기 때문인 것으로 판단된다. 군집주행 환경에서는 ESA만이 NASA-TLX 점수와 상관관계를 가지는 것으로 나타났다.
결론
본 연구의 목표는 주행 시뮬레이션을 이용하여 운전자의 주행패턴을 반영한 작업부하 평가지표를 개발하여 운전자의 작업부하를 평가하는 것이다. 주행 시뮬레이션의 시나리오는 자율차와 비자율차가 혼재되어 있는 상황을 설계하였으며, 군집주행 유무에 따른 비자율차 운전자의 작업부하를 평가하였다. 피실험자들에게 차량 추종 시나리오와 차로변경 시나리오를 자율차의 MPR 0%, 50%, 100%로 각각 주행하고, NASA-TLX 설문조사를 수행하여 작업부하 점수를 산출하였다. 실험을 통해 도출된 데이터를 이용하여 기존의 운전자 작업부하 평가지표인 ZERO, SRR, MLP, SDLP를 산출하고, 본 연구에서 제시한 개별운전자 주행패턴을 반영한 새로운 운전자 작업부하 평가지표인 ESA를 산출하였다. 또한, NASA-TLX 점수를 각 항목별 가중치를 적용하여 100점 척도로 산출하였다. 산출된 NASA-TLX 점수와 운전자 작업부하 평가지표 간에 상관분석을 실시하여 상관관계를 제시하였으며, 이를 종합한 결론은 다음과 같다.
차량 추종 시나리오와 차로변경 시나리오 모두 NASA-TLX 점수와 ESA의 상관계수가 가장 높은 것으로 분석되었다. 또한, 군집 유무에 따라서 2그룹으로 분류하여 상관분석을 실시한 결과, 차로변경 시나리오의 비군집 시를 제외하고 모두 ESA가 NASA-TLX 점수와 가장 높은 상관관계를 나타나는 것을 확인할 수 있었다. 차로변경 시나리오의 비군집 환경에서는 SDLP가 NASA-TLX 점수와 상관관계가 높은 것으로 나타났는데, 이는 차로변경 시 Offset 값의 변동이 크기 때문인 것으로 나타나 차로변경 이벤트를 고려하지 못한 한계점이 있는 것으로 확인하였다. 기존의 운전자 작업부하 평가지표는 ZERO, SRR의 경우 핸들의 조향이 반대가 되는 횟수를 카운트하는 1차원적인 개념의 지표로 작업부하를 평가 및 해석하는데 어려운 부분이 있으나, ESA의 경우 임계치를 초과하는 범위의 면적을 측정하는 2차원적인 개념의 지표이기 때문에 작업부하를 평가하는데 더 적절할 것으로 판단된다. 또한, MLP와 SDLP의 경우 차로의 중심을 벗어난 정도를 측정하여 평가하는 지표이기 때문에 종방향 주행 시 사행운전 정도를 평가하는데 적절한 지표이다. 따라서 차로변경 시나리오에서는 SDLP를 통한 작업부하 평가가 부적합할 것으로 판단된다.
상관분석 결과에 따라 본 연구에서 새로운 지표로서 제시한 ESA는 비자율차량 운전자의 작업부하를 평가할 수 있는 지표로 가장 타당한 것으로 분석되었다. 향후 차량에 첨단기술이 접목되어 차량자체에서 실시간으로 Steering, Offset 등의 데이터가 실시간으로 측정되면 운전자 작업부하 평가지표 값을 산출하여 운전자 별 작업부하를 측정하는데 활용할 수 있을 것으로 기대된다. 또한, ESA는 개별운전자의 주행패턴을 반영하기 위해 운전자의 주행이력을 반영한 임계값을 설정하고, 임계값을 초과하는 면적을 구하였다. 이러한 상대적 검지 방법론은 작업부하의 평가뿐만 아니라 운전자의 평소 주행행태를 벗어나는 공격운전자 및 위험운전 이벤트 검지 시 활용할 수 있으며, 위험운전자로 검지된 대상에 대하여 안전교육 및 단속을 실시하는 등 교통안전을 증진시킬 수 있을 것으로 기대된다.
본 연구의 한계로는 NASA-TLX 점수가 작업부하를 잘 나타낸다는 전제 가정이 맞는지에 대한 의문이 있으며, 향후 신체적 작업부하 평가방법, 뇌파, 심전도, 호흡수 등의 작업부하 평가기법을 활용하여 작업부하 평가지표간의 관계를 찾는 추가 연구가 필요하다. 또한, 본 연구에서는 자율차의 MPR, 차로변경에 대해서 작업부하를 채점하였으나 이 외에 추가적인 Task를 부여한 다른 시나리오에서의 실험을 통한 작업부하 평가가 필요하다. 뿐만 아니라, 차로변경 시나리오는 차로변경을 위해 Steering 및 Offset의 변화가 커지므로 이를 고려하여 횡방향 주행 시 작업부하 평가 프로세스를 구축할 필요가 있다. 마지막으로, 옆 차로의 대형 화물로 인해 심리적 압박감을 느끼는 경우 오히려 조향 조작이 전혀 없는 경우가 발생할 수 있다. 이러한 상황을 고려하여 Steering Velocity 뿐만 아니라 주행속도, 가속도 등을 ESA 도출 방법론을 적용하여 개별운전자의 주행행태를 고려한 작업부하 평가지표를 추가적으로 개발하고 검증하는 연구가 필요하다.
