

서론
선행연구 고찰
1. 혼합교통류 안전성 분석 연구
2. 도로선형에 따른 주행안전성 분석 연구
3. 선행연구와의 차별성
방법론
시뮬레이션 기반 자율차 거동 구현
MADS 기반 주행안전성 평가
1. 주행 네트워크 및 시나리오
2. 안전성 평가방법 및 평가지표 선정
안전성 평가방법론 활용 방안
1. 분석구간별 safety penalty 점수 도출
2. Risk score 도출 및 노선별 비교
결론
서론
자율차는 비자율차와 다른 주행행태를 나타내므로 자율차의 도입은 새로운 주행특성이 교통류에 반영되는 것을 의미한다. 또한 교통류에는 자율차와 비자율차 간의 새로운 상호작용이 나타난다. 자율차는 카메라와 센서 등을 통해 주변상황을 파악하므로 비자율차보다 인지‧반응시간이 빠르다는 특징이 있다. 이는 자율차가 비자율차보다 빠른 시간 내에 위험상황을 파악하고 회피행동을 결정할 수 있다는 것을 의미하므로 자율차 도입을 통한 사고발생 예방 효과를 기대할 수 있다. 그러나 자율차와 비자율차가 혼재된 혼합교통류 상황에 대한 안전성을 분석한 기존 연구에 따르면 자율차의 도입이 교통류에 긍정적인 영향만을 미치지 않는 것으로 도출되었다(Park et al., 2004). 혼합교통류에서는 자율차를 추종하는 비자율차 혹은 비자율차를 추종하는 자율차의 주행행태로 인해 교통류가 불안정할 수 있어 자율차의 도입이 교통류 안전성에 부정적인 영향을 미칠 수 있는 것으로 나타났다. 자율차의 도입이 불안정한 교통류를 유발할수록 사고발생 가능성이 증가할 것이며 이는 사회에 큰 혼란을 초래할 것이다. 따라서 자율차가 교통류에 부정적인 영향을 미치지 않도록 하기 위해서는 혼합교통류 상황에서의 차량 간 주행행태를 분석할 필요가 있다. 교통류 내에 존재하는 모든 차량이 자율차로 100% 전환되기까지 혼합교통류 상황이 오랜 시간 지속될 것으로 예측된다. 따라서 혼합교통류에서의 주행행태 분석 및 안전성 평가의 중요성이 있다.
자율차의 안전하고 원활한 주행을 위해서는 임의의 도로를 한번에 자율주행 가능구간으로 선정하기 보다는 자율주행 시 안전성이 확보될 수 있는 구간을 순차적으로 자율주행 가능구간으로 지정 또는 선정되어야 한다. 자율차가 실도로에서 주행하기 위해서는 자율차의 운행 지원을 위한 인프라 등을 고려하여 자동차전용도로 중 안전하게 자율주행 할 수 있는 구간(이하 “자율주행 안전구간”)이 지정되어야 한다(Act on the promotion of and support for commercialization of autonomous vehicles, 2022). 자율주행 안전구간이 지정되기 위해서는 평면곡선반지름, 평면곡선부의 길이, 편경사 등 도로의 기하구조가 고려되어야 한다. 따라서 다양한 도로선형의 기하구조를 고려하여 혼합교통류 상황에서의 주행행태를 분석할 필요가 있다.
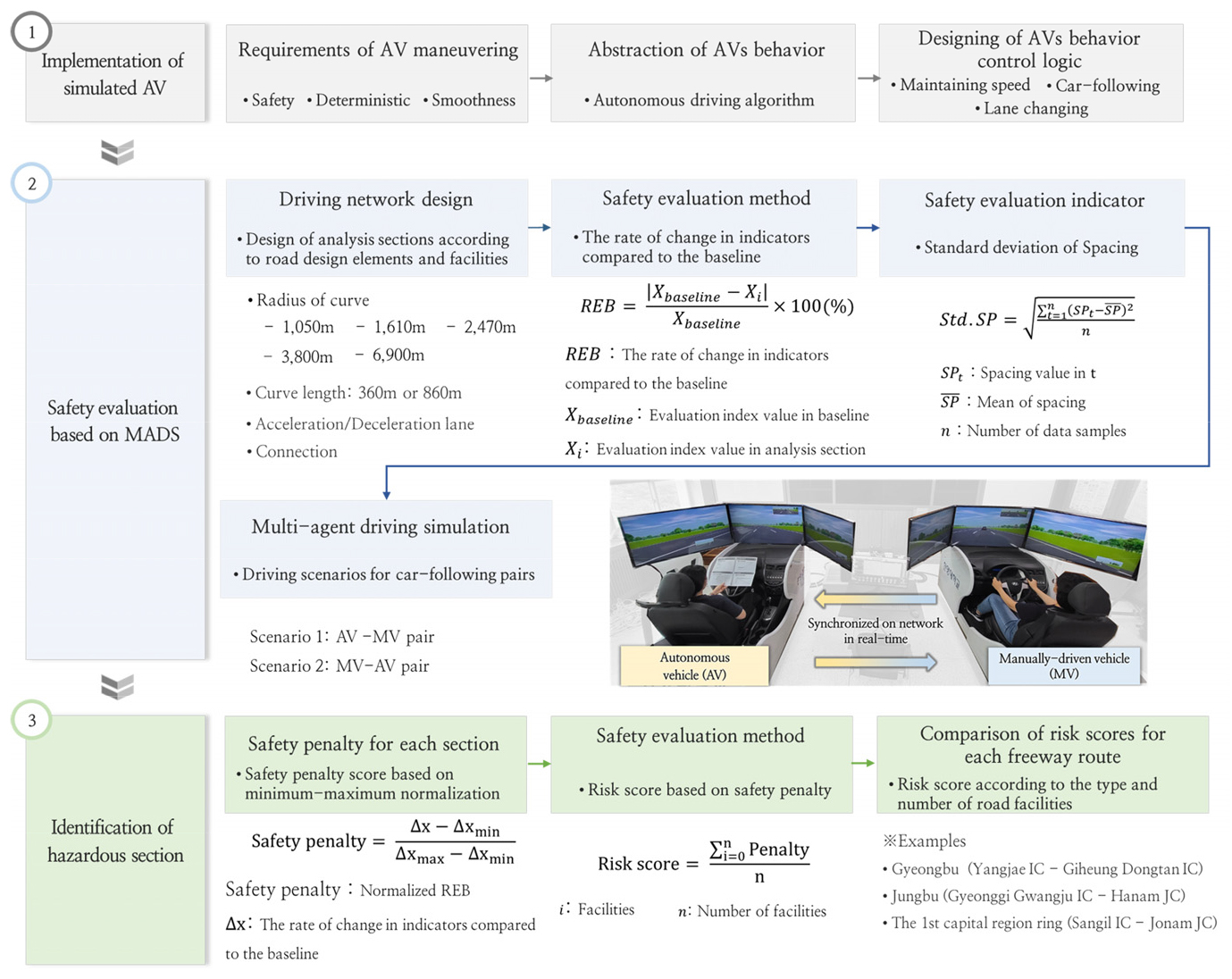
본 연구는 자율차와 비자율차의 주행행태를 고려하여 고속도로에서의 주행안전성을 분석 및 평가하는 방안을 개발하고 위험구간을 선정하는 것이 목적이다. 선행연구 고찰, 시뮬레이션 기반 자율차 거동 구현, MADS 기반 주행안전성 평가, 평가방법론 활용 방안 순으로 연구가 진행되었다. 선행연구 고찰에서는 혼합교통류 안전성을 분석한 연구와 도로선형에 따른 주행안전성을 분석한 연구 사례를 조사하였으며 본 연구와의 차별점을 제시하였다. 시뮬레이션 기반 자율차 거동 구현에서는 시뮬레이션을 통해 자율차를 구현할 시에 필요한 요구사항을 정립하고 자율주행 거동을 추상화하였으며 이를 기반으로 자율차 거동 알고리즘을 설계 및 시뮬레이션 프로그램에 구현하였다. 주행 시나리오를 설계하고 multi agent driving simulator(MADS)를 통해 주행실험을 수행하고 주행자료를 구득하였다. 안전성 평가지표를 선정하고 본 연구에서 개발한 안전성 평가방법을 통해 분석구간별 평가지표 변화율을 도출하여 도로위험 우선순위를 나타냈다. 평가지표 변화율을 이용하여 개별 분석구간의 도로 위험도를 나타내는 safety penalty 점수를 도출하였으며, safety penalty 점수를 이용하여 자율주행 구간에 대한 risk score를 산출하였다.
본 연구의 구성은 2장 선행연구 고찰, 3장 연구흐름도, 4장 시뮬레이션 기반 자율차 거동 구현, 5장 MADS 주행안전성 평가, 6장 평가방법론 활용 방안으로 구성된다. 선행연구 고찰에서는 혼합교통류 상황에 대한 안전성을 분석한 선행 연구 고찰을 통해 본 연구와의 차별성 및 의의를 제시하였다. 3장에서는 본 연구의 수행과정을 제시하였다. 4장에서는 자율차를 시뮬레이션에 구현하기 위해 요구되는 자율차 거동 요구사항을 정의하고 자율차 거동을 추상화 및 알고리즘 설계 과정을 제시하였다. 5장에서는 MADS를 이용한 주행실험 수행을 위한 네트워크 및 시나리오를 설계하고 안전성 평가를 위한 평가방법과 평가지표를 제시하였다. 마지막 장에서는 본 연구에서 도출한 안전성 평가 결과를 실제 고속도로에 적용하기 위한 활용 방안을 제시하였다.
선행연구 고찰
본 연구는 혼합교통류 상황에 대하여 도로선형에 대한 안전성 분석을 수행하기 위하여 혼합교통류에 대한 안전성을 분석한 연구와 도로선형에 따른 주행안전성을 분석한 연구를 고찰하였으며 선행연구와 본 연구와의 차별성을 제시하였다.
1. 혼합교통류 안전성 분석 연구
혼합교통류에서 자율차의 혼입률(Market penetration rate, MPR)에 따른 선‧후행차량의 안전성을 분석한 연구에서는 자율차 혼입률이 증가함에 따라 차량 간 상충률이 감소하여 안전성이 증가하였다(Lee et al., 2019). Yao et al.(2020)는 자율차의 혼입률에 따른 고속도로의 주행안전성을 분석하였으며, MPR 20-80%인 경우보다 동종의 차량이 주행하는 MPR 0% 및 100%에서 차량의 주행속도 표준편차가 작아 교통사고 발생 가능성이 낮다는 분석결과를 도출하였다. Guériau et al.(2020)는 자율차의 혼입률에 따른 고속도로 교통혼잡도를 분석하였으며, 2.5%와 7%의 자율차 혼입률에서는 교통혼잡도가 증가하고 혼입률 20%에서 교통혼잡도가 감소하였다. Mousavi et al. (2021)는 서비스 수준별(A-D) 자율차 혼입률에 따른 상충건수를 분석하였으며 모든 서비스 수준에서 자율차 혼입률이 0%에서 100%로 증가할 경우, 후미추돌 상충건수가 84-100% 감소하고 차로변경 상충건수가 42-100% 감소하여 안정성이 개선되었다는 분석 결과를 도출하였다. 자율차 혼입률에 따라 후미추돌 위험도를 분석한 연구에서는 자율차 혼입률이 증가할수록 후미추돌 상충 건수가 감소하였다(Jeong et al., 2017). Mahdinia et al.(2021)는 선행차량이 비자율차 혹은 자율차인 경우에 대한 선‧후행 차량 간 시나리오를 구성하여 실제도로를 대상으로 주행실험을 수행하였으며, 후행차량이 비자율차가 아닌 자율차를 추종하는 경우에 속도 및 가속도의 변화량이 적고 TTC가 높게 나타나 안전성이 증가하였다. Park et al.(2004)는 자율차의 혼입으로 혼합교통류가 발생하면서 불안정한 교통류를 유발하고 상충빈도가 증가한다는 연구결과를 도출하였다. 또한 Gouy et al.(2014)는 혼합교통류에서의 비자율차의 안전성을 분석한 결과, 비자율차의 주행속도 표준편차가 증가하여 안전성이 감소하였다는 연구결과를 도출하였다.
2. 도로선형에 따른 주행안전성 분석 연구
도로선형 변화에 따른 운전자의 주행안전성을 분석한 기존 연구를 고찰하였다. 고속도로 곡선부 주행 시 원심력으로 인해 운전자에게 복잡한 주행 능력이 요구되어 운전자 측면에서 위험한 구간이라고 정의하였다(Findley et al., 2012). 통계분석과 휴리스틱 분석을 통해 횡방향 주행안전성에 영향을 미치는 설계요소를 도출한 연구에서는 곡선부의 길이가 길수록 횡방향 가속도 표준편차가 증가하여 주행안전성이 저하하였다(Jung et al., 2021a). 평면곡선 반지름이 작고 종단경사가 내리막인 구간에서는 운전자의 차량제어 능력이 저하한다(Eftekharzadeh et al., 2014). 평면곡선 반지름이 주행성능에 미치는 영향을 분석한 연구에서는 평면곡선 반지름이 평균 주행속도와 차로 유지 성능에 영향을 미친다는 결과를 도출하였다(Jeong et al., 2017). 평면곡선 반지름과 사고 빈도에 대한 예측 모형을 분석한 연구에서는 평면곡선 반지름이 감소함에 따라 사고 빈도가 증가하였다(Bauer et al., 2013). Jung et al.(2021b)는 곡선부 주행 시 고령 운전자의 횡방향 주행안전성을 분석하였으며 평면곡선 반지름이 3,000m 미만인 경우, 차로이탈률이 가장 많은 구간의 종단선형은 오르막이고 횡방향 가속도의 표준편차가 가장 높은 구간은 내리막으로 도출하였다. 평면곡선 반지름과 사고빈도 간의 상관관계를 분석한 기존 연구에서는 평면곡선 반지름이 증가함에 따라 사고 빈도가 감소하여 음의 상관관계로 분석되었다(Gooch et al., 2016).
3. 선행연구와의 차별성
선행연구의 분석 결과에 따르면, 자율차 도입을 통해 교통류 안전성이 개선되는 긍정적인 영향이 나타날 수 있으나 교통류가 불안정하는 등 부정적인 영향도 나타날 수 있다. 따라서 자율차 도입 시 나타나는 혼합교통류에서의 주행안전성을 평가하고 안전성이 취약한 구간에서의 도로선형 특성을 파악할 필요가 있다. 기존 연구에서는 종단선형과 평면선형에 대한 도로선형에 대하여 교통류 관점의 안전성을 분석하였으나, 본 연구는 평면선형에 대한 기하구조와 더불어 터널, 연결로 등 도로시설물이 고려된 네트워크에 대하여 도로주행 시뮬레이터를 통해 선‧후행 차량간의 상호작용을 분석하였다는 점에 있어서 차별성이 있다. 또한 기존 연구에서는 시뮬레이션을 통한 혼합교통류 상황에서의 안전성 평가 결과를 실도로에 적용하는 방안을 제시하지 않았다. 그러나 본 연구에서는 도로주행 시뮬레이션을 통해 도출한 안전성 평가 결과를 기반으로 실도로 안전성 평가에 적용할 수 있는 방안을 제시하였다. 또한 본 연구는 multi-agent 주행 시뮬레이터를 이용하여 자율차와 비자율차가 서로 상호작용하는 혼합교통류 상황을 설계하고 선‧후행 차량간의 상호작용을 고려하여 안전성을 분석하였다는 것에서 선행연구와의 차별점이 있다.
방법론
MADS(Multi-agent driving simulator)를 이용하여 선‧후행차량의 주행행태 자료를 수집하고 전처리 및 분석 과정을 수행한 연구 흐름도를 Figure 1에 제시하였다. 본 연구는 자율주행차량 거동 구현, MADS 기반 주행안전성 평가, 평가방법론 활용 방안으로 구성된 3단계로 연구를 수행하였다. 1단계 자율주행차량 거동 구현 단계에서는 자율차 거동을 자체적으로 검토하고 SCANeRTM STUDIO 프로그램을 이용하여 주행행태 알고리즘을 작성하였으며, script를 작성하여 자율주행차량을 구현하였다. 2단계에서는 도로주행 시뮬레이션을 수행하기 위해 네트워크와 시나리오를 설계하여 주행실험을 수행하고 안전성 평가방법 및 안전성 평가지표를 선정하였다. 마지막으로 안전성 평가방법을 실제 고속도로에 적용할 수 있는 활용 방안을 제시하였다. 2단계에서 도출된 baseline 대비 평가지표 변화율을 기반으로 도로선형 및 도로시설물별 safety penalty를 산출하였다. 고속도로 노선 내 도로시설물에 따른 safety penalty를 합산하여 해당 고속도로 노선의 risk score를 도출하였다.
시뮬레이션 기반 자율차 거동 구현
실제 자율차 주행자료 구득의 한계로 인해 시뮬레이션에 대한 정산(Calibration)과 검증(Validation)을 수행한 연구가 미비하다. 이러한 한계점을 극복하기 위해 시뮬레이션으로 구현된 자율차(Simulated AV) 거동에 대한 현실성 확보가 필요하다. 본 연구에서는 시뮬레이션을 이용한 자율차 거동 구현 시 요구되는 사항을 정립하고 요구사항이 반영된 자율차 거동 제어 알고리즘을 설계하였다(Jo et al., 2022).
자율차 거동 요구사항의 첫 번째는 safety이다. 자율차는 주변차량의 cut-in/out 등을 제외하고 스스로 위험상황을 발생하는 것이 불가하다고 정의하였다. 두 번째 요구사항은 deterministic이다. 자율차는 사전에 정의된 자율주행 알고리즘에 따라 주행경로, 가‧감속도, 조향 등을 결정한다(Lillicrap et al., 2015; Wang et al., 2021; Zhang et al., 2019). 따라서 동일한 주행환경에서는 항상 일정한 주행행태를 나타내는 것에서 비자율차와의 차별점이 있다. 세 번째 요구사항은 smoothness이다. 자율차의 종‧횡방향 제어 기능은 차량의 주행속도 및 가‧감속도를 일정하게 유지하고 lane offset을 조정하여 안정적인 주행을 지원하기 때문에 자율차는 비자율차와 달리 smoothness한 주행 특성을 나타낸다(Paden et al., 2016; Lee and Litkouhi, 2012). 추상화는 자율주행 시스템 및 기술에 대한 핵심적인 개념을 명확하게 단순화시키는 것을 의미한다(Jo et al., 2022). 실제 자율차는 다양한 센서들과 통신기능을 이용하여 주변상황을 인지하고 판단하는 과정을 수행한다. 그러나 자율차의 정확한 거동과 차량 제어를 위한 기술 및 전략은 알 수 없기 때문에 자율차의 거동을 추상화하여 구현할 필요가 있다. 자율주행 시스템이 구동되었을 때 차량의 추상화된 거동을 구현하기 위하여 주행 시뮬레이션의 모듈(module)을 기반으로 자율주행 알고리즘을 설계하였다.
본 연구에서 정립한 자율차 거동의 요구사항이 반영되는 자율주행 기능으로는 주행속도 유지, 차량추종, 차로변경에 대한 3가지이다. 도로주행 시뮬레이션 프로그램인 SCANeRTM STUDIO의 script editor 모듈을 이용하여 각 자율주행 기능 알고리즘을 구현하였다. Simulated AV 거동의 적정성은 주행 시뮬레이션으로부터 도출된 자율차와 비자율차 간의 가속도 표준편차, lane position 표준편차, spacing 표준편차에 대한 주행특성 차이 검증을 통해 평가되었다(Jo et al., 2022). 기존 연구에서 자율차는 비자율차보다 가속도‧lane position‧spacing의 표준편차가 작은 것으로 도출되어 simulated AV의 거동은 safety, deterministic, smoothness에 대한 요구사항을 만족하는 것으로 나타났다. 모든 평가지표는 95% 신뢰수준에서 통계적으로 유의한 차이(p<0.05)가 존재하는 것으로 분석되었다. 따라서 본 연구에서 추상화된 자율차 거동은 적정한 것으로 판단할 수 있다.
MADS 기반 주행안전성 평가
MADS는 차량 간 상호작용을 기반으로 주행행태 및 주행안전성을 분석할 수 있도록 다수의 주행 시뮬레이션을 실시간으로 연동한 장비를 의미하며 MADS에 대한 개념도를 Figure 2에 제시하였다. 각 차량의 주행 네트워크와 시간이 실시간으로 연동되며 시뮬레이터에 탑승한 운전자는 핸들, 기어, 브레이크, 엑셀을 직접 조작하여 주행한다. MV는 운전자가 직접 가‧감속 조정 및 핸들 조향을 수행하고 AV는 운전자가 직접적인 물리적 개입없이 자율차 거동 알고리즘에 따라 자율적으로 주행한다. 추종상황에서 후행차량은 운전자의 인지‧판단 또는 자율차 알고리즘에 의해 도로선형 및 선행차량의 주행행태를 파악하고 주행행태를 결정한다. 동일 시공간에 대하여 선‧후행차량의 개별차량 주행궤적 데이터가 생성되고 주행 데이터를 이용하여 개별차량의 주행행태 및 차량간 상호작용 주행행태 분석을 수행한다.
본 연구를 위한 주행실험은 2022년 7월 18일에서 7월 29일까지 12일간 수행되었다. 주행실험에 참가하기 위한 피실험자를 모집하여 한양대학교 에리카캠퍼스 제2공학관 538호에 소재한 HY-STARS(Hanyang Smart Transportation Analysis and Research with Simulations) 실험실에서 수행되었다. 피실험자의 조건은 20살 이상이고 1년 이상의 운전 경력을 가지고 있는 운전자이며 30명의 피실험자를 모집하였다. 피실험자 중 남성은 18명, 여성은 12명으로 구성되어 있다. 피실험자의 연령층 20대부터 70대까지 다양한 연령층을 고려하였으며 전체 인원에 대한 평균 연령은 49세이고 표준편차는 18.6세이다. 65세 이상인 고령 운전자는 9명으로 구성되었으며 평균 연령은 67.4세이고 표준편차는 2.5세이다.

1. 주행 네트워크 및 시나리오
주행 네트워크를 설계하기 위하여 설계속도 120km/h에 대한 편경사 설계 시 고려되는 평면곡선반지름을 이용하였다. 또한 평면곡선부의 길이는 고속도로 사고자료에서 도로선형 정보 조사 시 기록되는 평면곡선부 길이 구분 카테고리 값인 500m와 1,000m를 이용하였다(Korea Expressway Corporation, 2022). 네트워크 설계 시 이용한 평면곡선반지름 값은 1,050m, 1,610m, 2,470m, 3,800m, 6,900m이며 각 반지름마다 완화곡선을 포함하여 500m와 1,000m 길이의 평면곡선부를 구축하였다. 완화곡선은 원곡선의 시점 및 종점으로부터 70m에 해당되는 구간이므로 분석에 사용되는 원곡선의 길이는 360m, 860m이다. 또한 도로시설물을 주행 네트워크에 고려하기 위해 터널과 연결로 및 가‧감속차로의 유형을 고려하여 시나리오를 설계하였다. 연결로의 유형으로는 직결형, 클로버형, 트럼펫형이 있고 가‧감속차로의 유형은 직접식과 평행식이 있다(Ministry of Land, Infrastructure and Transport, 2020). 도로선형 및 도로시설물에 따라 구성된 분석구간은 18개이며 주행 시 각 분석구간 간의 영향을 최소화하기 위해 분석구간 사이에는 250m 길이의 평지의 직선구간을 고려하였다. 도로시설물이나 도로선형에 따른 기하구조의 영향을 받지 않는 평지의 직선구간을 baseline 구간으로 설정하였으며 주행 네트워크에 대한 분석구간을 Table 1에 제시하였다.
자율차 및 비자율차를 이용하여 차량추종 pair를 구성하는 경우, 자율차-자율차, 자율차-비자율차, 비자율차-자율차, 비자율차-비자율차 페어로 4가지가 구성된다. 본 연구는 자율차와 비자율차가 혼재하는 혼합교통류 상황에 대한 안전성을 평가하는 것이므로 주행 시나리오는 자율차-비자율차 pair와 비자율차-자율차 pair이다. 주행실험을 위해 모집된 피실험자는 자율차-비자율차 pair 시나리오와 비자율차-자율차 pair 시나리오를 각각 1회씩 주행하였다.
Table 1.
Driving network
2. 안전성 평가방법 및 평가지표 선정
본 연구에서는 평면선형조건과 도로시설물에 따라 구간별로 안전성을 분석한다. 평지의 직선구간은 핸들 조작이 필요없고 가‧감속이 요구되지 않아 주행안전성 평가를 위한 baseline 구간이다. 평면선형조건과 도로시설물이 존재하는 구간에서의 주행행태는 가‧감속과 같은 주행속도 조절이 필요하고 조향각 또한 증가한다. 본 연구에서는 평지의 직선구간(baseline) 대비 평가지표의 변화율을 기반으로 안전성을 평가하는 relative evaluation by baseline(REB) 방법론을 이용하여 안전성을 평가하였다(Jung, 2023). 평지의 직선구간에서의 평가지표 산출 값을 기반으로 분석구간별 평가지표 산출 값에 대한 변화율을 통해 분석구간별 안전성을 평가할 수 있다. 평지의 직선구간 대비 분석구간의 평가지표 변화율 산출식을 Equation 1에 제시하였다. REB 방법은 주행속도, 횡방향 가속도, spacing 등 종‧횡방향 및 차량간 상호작용에 따른 평가지표를 다양하게 적용할 수 있다는 장점이 있다. 평가지표 변화율이 가장 높은 구간은 평지의 직선구간 대비 가장 많은 주행행태 변화가 나타난 구간을 의미하므로 안전성이 가장 낮은 것으로 해석된다.
여기서, : 평지의 직선구간 대비 분석구간의 평가지표 변화율(%)
: 평지의 직선구간에서의 평가지표 값
: 분석구간 에서의 평가지표 값
: 분석구간 ID(1, 2, …, 24)
추종상황에서 spacing은 선행차량의 차두와 후행차량의 후미까지의 거리를 의미하며 차량간 상호작용 분석을 위한 지표로 사용된다. 각 차량이 주행하는 동안 가·감속으로 인해 spacing이 변화하고 spacing이 증가할수록 차량 간 충돌 가능성이 저하함을 의미하며 안전성 평가지표로 사용된다(Schakel et al., 2017; Park et al., 2019; Li et al., 2022; Jo et al., 2022). 본 연구에서는 spacing의 표준편차를 선·후행 차량 간 상호작용에 따른 안전성을 평가할 수 있는 지표로 사용하였다. Spacing과 spacing 표준편차에 대한 산출 수식을 Equation 2에 나타냈다.
안전성 평가지표인 spacing 표준편차를 이용하여 REB에 적용하였을 때 spacing 표준편차에 대한 변화율이 양수일 경우, 직선구간보다 평가지표 값이 증가하고 안전성이 감소함을 의미한다. Spacing 표준편차에 대한 변화율이 음수일 경우, 직선구간보다 평가지표 값이 감소하고 안전성이 저하되지 않음을 의미한다.
여기서, : Spacing의 표준편차(m)
: 운전자 ID
: Spacing(m)
: 분석 단위구간(m)
모든 분석구간에 대한 spacing 표준편차 기반 평가지표 변화율을 내림차순으로 정리하여 안전성 취약구간 순위 도출 결과를 Table 2에 제시하였다. Spacing 표준편차가 15.37m이고 평가지표 변화율이 3,422%로 가장 높아 안전성이 가장 낮은 구간은 트럼펫형 연결로이다. 안전성이 낮은 상위 8개 구간 중 7개 구간은 연결로, 가‧감속차로와 같은 도로시설물 구간으로 평면선형 구간보다 도로시설물 구간에서 안전성이 낮은 것으로 나타났다. 평면선형에 따른 기하구조가 나타나는 분석구간 중 평면곡선부의 길이가 500m인 구간보다 1,000m인 구간에서의 평가지표 값과 safety penalty 점수가 높은 것으로 나타났다. 이는 주행행태가 변화되는 구간이 길수록 안전성이 저하되는 것으로 해석된다.
Table 2.
Ranking of hazardous section
안전성 평가방법론 활용 방안
1. 분석구간별 safety penalty 점수 도출
REB 방법을 이용한 분석구간별 안전성 평가결과를 이용하여 도로시설물에 대한 safety penalty 점수를 산출할 수 있는 방안을 제시하였다. 개별 분석구간에서 도출된 평가지표 변화율을 기반으로 최소최대정규화(Min-max normalization)를 수행함으로써 도로 안전성 평가를 위한 safety penalty 점수를 산출할 수 있다. 최소최대정규화 과정을 통해 각 분석구간마다 0에서 1사이의 safety penalty 점수가 나타난다. Safety penalty 점수는 안전성 취약정도로 값이 높을수록 안전성이 낮음을 의미한다. 최소최대정규화를 통한 safety penalty 점수 산출식은 Equation 3에 제시하였다.
여기서, : 정규화된 평가지표 변화율
: 평가지표 변화율(%)
: 평가지표 변화율 최대값(%)
: 평가지표 변화율 최대값(%)
국내 고속도로 노선에 대한 도로선형정보를 파악할 수 없다는 한계점으로 인하여 본 연구에서의 risk score 도출 시에는 도로시설물에 대한 safety penalty 점수만을 이용하였다. 연결로, 가‧감속차로, 터널에 따른 safety penalty 점수 도출 결과를 Table 3에 제시하였다. Safety penalty 점수가 높아 안전성이 낮은 상위 3개의 도로시설물은 트럼펫형 연결로(1.00점), 평행식 감속차로(0.79점), 평행식 가속차로(0.61점)로 나타났다. 가‧감속차로의 경우 제한속도에 맞추어 주행속도를 조절해야 하므로 많은 가‧감속이 요구되어 spacing의 표준편차가 높게 나타난 것으로 분석된다. 트럼펫형 연결로의 경우, 직결형, 클로버형 연결로와 달리 곡선부 방향이 전환되는 배향곡선 구간이 존재하므로 많은 가‧감속과 핸들조향이 요구되어 spacing의 표준편차가 높게 나타난 것으로 분석된다. Safety penalty 점수가 가장 낮은 도로시설물은 점수가 0.10점인 터널이다. 터널은 도로선형의 변화가 없어 타 도로시설물보다 주행행태의 변화가 크지 않은 것으로 분석된다.
Table 3.
Safety penalty by road facilities
2. Risk score 도출 및 노선별 비교
개별 분석구간의 safety penalty 점수를 이용하여 국내 고속도로 노선에 대한 risk score를 도출하는 산출식을 Equation 4에 제시하였다. 고속도로 노선 내 존재하는 도로선형 및 도로시설물에 safety penalty 점수를 부여하고 노선 내 safety penalty 점수를 합산한다. 합산된 safety penalty 점수를 평가 대상 도로선형 및 도로시설물의 총 개수로 나누어 최종 risk score를 도출한다. Risk score가 높을수록 안전성이 저하함을 의미한다.
여기서, : 최종 risk score
: 도로선형 및 도로시설물
: 노선 내 도로시설물 개수
국내 고속도로 노선 중 C-ITS 인프라가 구축되어 향후 자율협력주행 환경이 용이할 것으로 판단되는 C-ITS 시범사업 구간을 본 연구에서의 안전성 평가방법론 활용 방안 적용 대상구간으로 선정하였다. C-ITS 시범사업 구간은 경부고속도로(양재IC-기흥동탄IC, L=29.1km), 수도권제1순환고속도로(조남JC-상일IC, L=43.0km), 중부고속도로(하남IC-경기광주IC, L=13.0km)이다. 각 고속도로 노선의 상‧하행선에 존재하는 도로시설물을 파악하여 Table 4에 제시하였다. 수도권제1순환고속도로 상행선에 존재하는 도로시설물의 개수가 49개, 하행선이 52개로 가장 많은 도로시설물이 존재하였다. 중부고속도로 상행선의 도로시설물 개수가 11개, 하행선이 12개로 가장 적은 도로시설물이 존재하였다. 3개 고속도로 노선에 대하여 가속차로의 경우 직접식보다 평행식이 18개 많고 감속차로의 경우 20개 많은 것으로 나타났다. 연결로의 경우 직결형, 클로버형, 트럼펫형 순으로 개수가 많았다.
Table 4.
Facilities by freeway route
각 고속도로 노선의 상‧하행 노선에 대하여 도로시설물의 종류와 개수에 따라 safety penalty 점수를 합산하여 risk score를 도출하였으며 이를 Table 5에 제시하였다. Risk score가 높아 도로 안전성이 가장 취약한 노선은 경기광주IC에서 하남JC로 향하는 중부고속도로의 상행선이다. Safety penalty 점수가 6.60으로 수도권제1순환고속도로와 경부고속도로에 비해 10점 이상 낮은 점수이나 risk score는 0.60으로 가장 높게 나타났다. 중부고속도로 상행선은 하행선보다 터널이 1개 적고 평행식 감속차로가 1개 더 많다. 평행식 감속차로는 도로 안전성 safety penalty 점수가 0.79로 도로시설물 중 위험성이 2번째로 높은 시설물이다. 중부고속도로 상행선은 평행식 감속차로의 개수가 1개 더 많은 영향으로 인해 하행선보다 안전성이 낮은 것으로 분석되었다. 수도권제1순환고속도로의 하행선의 경우 risk score가 0.51로 모든 노선 중 안전성이 가장 높은 것으로 나타났다. 자율차를 고속도로에 도입하기 위해서는 중부고속도로 상행선에 우선적으로 안전성 개선 대책을 마련해야할 것으로 해석된다.
Table 5.
Risk score by freeway route
결론
본 연구는 MADS를 이용하여 자율차와 비자율차가 혼재된 혼합교통류 상황에서 각 차량의 주행행태가 고려된 고속도로 주행안전성 평가 방법론을 개발하고 위험구간을 선정하는 것이 목적이다. 실제 자율차의 주행정보를 수집할 수 없는 환경에서 도로주행 시뮬레이션 상에 자율차를 구현하기 위해 자율차 거동 요구사항을 정립하였다. 첫 번째 요구사항은 자율차가 스스로 위험상황을 발생하는 것이 불가능한 것을 의미하는 safety이고 자율차는 사전에 정의된 알고리즘에 따라 주행경로, 가‧감속도, 조향 등을 결정한다는 것을 나타내는 deterministic이 두 번째 요구사항이다. 마지막 요구사항은 자율차가 주행속도와 가‧감속도를 일정하게 유지할 수 있고 lane offset 조정을 통해 안정적인 주행을 지원하기 때문에 비자율차와 다르게 smoothness한 주행행태를 나타낸다는 것이다. 자율주행 시스템의 기술 및 전략을 파악할 수 없기 때문에 본 연구에서는 추상화라는 개념을 도입하였다. 추상화는 자율주행 시스템과 기술의 핵심적인 개념을 명확하게 간추려서 단순화시키는 것을 의미하며, 본 연구는 추상화를 통해 자율차 거동 알고리즘을 설계하였다. 자율차 거동의 요구사항이 반영되는 주행속도 유지 및 차량추종에 관한 자율주행 기능을 도로주행 시뮬레이션 프로그램의 script editor module을 이용하여 구현하였다.
다양한 도로선형에 대한 안전성을 비교 및 평가하기 위해 기하구조 및 도로시설물을 고려하여 주행 시나리오를 설계하였다. 선‧후행 차량 간 상호작용 분석하기 위하여 2대의 시뮬레이터가 동일한 시간 및 공간정보에 대하여 실시간으로 동기화되는 MADS를 이용하여 추종상황을 이루는 개별차량의 주행 데이터를 수집하였다. 시뮬레이터를 통해 수집된 주행 자료의 변수들은 절대적인 값이 아니므로 특정 분석구간의 안전성에 대하여 절대적인 의미를 부여할 수 없다. 따라서 운전자의 주행행태가 급격하게 변화하지 않는 baseline을 설정하고 baseline 대비 분석구간을 상대비교하여 안전성을 평가하는 relative evaluation by baseline(REB) 방법을 제시하였다. 선‧후행 차량간 안전성을 평가하는 지표인 spacing 표준편차를 기반으로 분석구간별 spacing 표준편차 기반 변화율을 산출하고 도로 안전성 취약구간 순위를 나타냈다. Spacing 표준편차 기반 변화율을 이용하여 최소최대정규화를 통해 안전성 취약 정도를 의미하는 safety penalty 점수를 도로선형 및 도로시설물 별로 도출하였다. Spacing 표준편차 기반 변화율이 높아 안전성이 가장 낮은 구간은 트럼펫형 연결로로 나타났다. 안전성이 낮은 상위 10개 구간 중 7개 구간은 연결로 및 가‧감속차로와 같은 도로시설물 구간으로 평면선형 구간보다 도로시설물 구간에서 안전성이 낮은 것으로 나타났다. 트럼펫형 연결로는 곡선부 방향이 바뀌는 배향곡선이 존재하여 타 구간보다 많은 가‧감속과 핸들조향이 요구되기 때문에 안전성이 낮은 것으로 분석되었다.
본 연구의 도로안전성 평가 방법을 실도로에 적용하기 위하여 자율차를 지원할 수 있는 인프라가 우선적으로 마련될 것으로 판단되는 C-ITS 시범사업 노선인 경부고속도로, 중부고속도로, 수도권제1순환고속도로 일부 구간에 대하여 도로 안전성을 비교 평가할 수 있는 risk score를 분석하였다. 중부고속도로의 상행선(경기광주IC - 하남JC)의 safety penalty 점수가 6.60점, risk score가 0.60점으로 도출되어 도로안전성이 가장 낮은 노선이다. 수도권제1순환고속도로의 시계방향 노선(상일IC – 조남JC)의 risk score가 0.51점으로 도출되어 가장 안전성이 높은 노선으로 나타났다. 따라서 자율차 주행이 가능한 고속도로를 선정 시 주행안전성 측면에서는 수도권제1순환고속도로의 하행선을 최우선적으로 고려할 수 있다. 또한 중부고속도로 상행선에 대하여 안전성 개선 대책이 우선적으로 마련 및 시행될 필요가 있다.
본 연구에서 사용한 안전성 평가방법인 REB를 이용하여 국내 고속도로에 대한 자율차 도입 시 혼합교통류로 인한 안전성 취약구간을 선제적으로 예측할 수 있으며 안전성 평가방법론 활용 방안을 통해 도로주행 시뮬레이터를 이용한 안전성 평가 결과를 실도로에 적용할 수 있다. 자율주행차 시범운행지구 선정 및 운영 평가 시 교통안전에 대한 별도의 평가 항목이 부재한 상황으로 시범운행지구에 대한 교통안전 검증체계가 미흡한 실정이다. 본 연구의 고속도로 안전성 평가 방법을 활용하여 자율주행차 시범운행지구 예비 노선 중 안전성 측면에서 최적의 노선인 자율주행 운영 가능구간을 선정할 수 있다. 실제 고속도로를 주행하는 차량은 승용차, 트럭, 버스 등 다양한 차종이 존재하지만 본 연구는 승용차만을 대상으로 주행실험을 수행하였으므로 다양한 차종의 주행행태가 고려된 혼합교통류 안전성을 분석할 필요가 있다. 교통류에 대한 자율주행차의 MPR은 점진적으로 증가할 것이기 때문에 교통시뮬레이션을 이용하여 자율차의 MPR을 10%, 20%, 30%, 40% 등 다양하게 고려하여 자율차와 비자율차가 다양한 비율로 혼재된 교통상황의 안전성을 평가할 필요가 있다. 혼합교통류 상황에서는 자율차 및 비자율차 간의 상호작용에 따라 후행차량의 주행행태가 변화한다. 본 연구에서 수집된 주행행태 자료를 활용하여 교통시뮬레이션 분석 시 자율 및 비자율차의 거동행태 구현에 효과적으로 사용될 것으로 판단된다.
