

서론
1. 연구의 배경 및 목적
2. 자율주행자동차의 도시 가로 운행에 따른 운영 효율성 분석
주행행태 데이터 분석 및 신호교차로 용량 산정
1. 주행행태 기반 교차로 용량 산정 모델
2. 자율주행자동차 데이터 수집
3. 자율주행자동차 주행행태 도출
분석 결과
1. 주행행태 데이터 도출 결과
2. 포화교통류율 및 용량 분석 결과
결론
서론
1. 연구의 배경 및 목적
세계적으로 자율주행자동차(Autonomous Vehicles, AV)의 도입을 위한 기술 개발이 진행되고 있다. 국내에서는 2025년에 자율주행 버스·셔틀 도입을 목표로 하고 있으며, 2027년에는 완전 자율주행이 가능한 AV의 상용화를 계획 중에 있다. Mckinsey(2023a, 2023b) 보고서에서는 향후 AV의 판매량을 분석한 결과로 SAE(Society of Automotive Engineers) 기준 Lv 3 이상의 기술을 탑재한 차량이 2030년과 2035년에 각각 약 20%, 57% 판매될 것으로 추정하였다.
향후 도로에 AV가 도입된다면 교통의 흐름이 변화할 것으로 예상된다(Jin et al., 2018). 비자율주행자동차(Human Driving Vehicles, HDV)는 인적 요인으로 인한 예측 불가능성이 존재하지만, AV는 사전에 정의된 알고리즘에 따라 체계적으로 행동한다(Liu et al., 2018; Qi et al., 2020). 따라서, AV의 도입은 인적 요인 배제와 군집 주행으로 인해 평균주행속도 상승, 교통흐름 안정화, 도로 용량 증대 효과가 있다(Jung et al., 2017). 다만, 실제 초기 시장형성단계에서 AV의 시장 점유율(Market Penetration Rate, MPR)이 낮고 HDV와 혼재될 때는 도로 용량 증대 효과는 낮아질 수 있으며, 교통혼잡이 심화할 가능성이 높을 것으로 예상된다(Park et al., 2018).
AV가 도시부 도로에 혼입 시 용량, 지체, 대기열 길이, 이동시간 등 효과 분석에 관한 연구가 진행되고 있으나(Friedrich, 2016; Zuping et al., 2021; Yoo et al., 2022), 연구에 적용된 AV의 인지반응시간, 안전거리와 같은 주행행태는 이상적인 값을 이용하여 진행한 연구들이 대부분인 실정이다. 따라서 본 연구는 AV의 상용화 초기 단계에 AV의 혼입이 신호교차로의 포화교통류율 및 용량에 미치는 영향을 AV 운행 관련 핵심 파라미터의 실측을 기반으로 사전에 추정하고자 한다. 이를 위해 자율주행 시범운행지구에서 운행되고 있는 AV를 대상으로 영상기록장치, 드론, probe car, 동승 조사를 이용하고 자율주행 기록장치 데이터를 활용하여 AV의 주요 파라미터값을 측정 및 취득하였으며, 이를 바탕으로 AV와 HDV의 주행행태를 비교·분석하였다.
본 연구의 범위는 AV의 실제 운행 데이터를 이용한 초기 작업으로서 승용차에 대해서만 다루고 있으며, 추후 버스 및 중차량을 포함하여 연구 범위를 확장할 예정이다.
2. 자율주행자동차의 도시 가로 운행에 따른 운영 효율성 분석
도시 가로에서 AV의 혼입은 교통류를 개선하고, 교통량(수요)의 증가를 완화할 것이라고 예상한 Park et al.(2015)의 연구처럼 이 부문 연구들의 주류는 AV의 혼입이 가로에 미치는 영향을 대체로 긍정적으로 평가하고 있다. 좀 더 구체적인 내용은 다음과 같다.
Lu et al.(2020)은 AV의 도입이 도로 용량에 미치는 영향을 분석하기 위해 거시적 교통 기본도인 MFD(Macroscopic Fundamental Diagram)를 기반으로 한 수학적 모델을 설계하여 가상의 네트워크와 부다페스트에 있는 교차로를 기반으로 SUMO 시뮬레이션을 진행하였다. 분석 결과, 가상의 네트워크에서는 일반 차량으로 구성된 네트워크에 비해 용량이 16.01% 증가하였고 부다페스트 교차로에서는 용량이 12.29% 증가함을 보여주었다.
ACC(Adaptive Cruise Control) 기능을 기반으로 V2X 통신을 지원하는 CACC(Cooperative Adaptive Cruise Control)를 이용한 연구 사례도 존재한다. Bailey(2016)는 IDM(Intelligent Driver Model)과 EIDM(Enhanced Intelligent Driver model)을 이용하여 차간 거리, 차량의 속도, 가감속도와 같은 매개변수를 설정하였다. 이후 가상의 네트워크와 스위스의 로잔 시내의 네트워크를 기반으로 도로 용량과 통행시간을 분석하였다. 분석 결과, AV의 MPR이 증가할수록 교차로의 용량이 증가하고 평균 지체 시간과 통행시간이 감소하는 것을 발견하였다.
Yoo et al.(2022)은 도시의 지체와 교통량의 변화를 추정하기 위해 미국 HCM(Highway Capacity Manual) 7th의 제시된 파라미터를 이용하여 제주 혁신 도시를 대상으로 CAV의 혼입률에 따른 분석을 진행하였다. 해당 연구의 분석 결과는 AV의 비율이 높아질수록 용량 증대에 긍정적인 영향을 미쳤으며, HDV로 구성된 경우보다 최대 68.30%의 용량 증대 효과가 있는 것을 확인하였다. Huang et al.(2023)은 가상의 네트워크와 베이징의 도시 가로를 기반으로 차량 추종 모형인 IDM을 이용하여 SUMO를 활용한 네트워크 분석을 진행하였다. 해당 연구에서는 세 가지 유형의 차량(MV, LAV, HAV)으로 구분하고 유럽 위원회(European Commission)에서 공개한 OpenACC와 Waymo에서 공개한 Waymo 자율주행 기록장치 데이터를 이용하였다. 차량 추종 모델의 파라미터 값은 대부분 자율주행 기록장치 데이터를 활용하고 일부는 임의에 값으로 가정하였다. 분석 결과, AV의 혼입은 도로의 용량을 최대 19.0% 증가시키는 것을 확인하였다.
Wu et al.(2022)은 가상의 네트워크에서 CAV의 혼입률에 따른 도로의 용량을 추정하였는데, CAV의 혼입률이 증가할수록 용량이 증가하는 것을 보장하지 않는다고 하였다. 이 연구는 낮은 혼입률에서 HDV와 CAV의 상호관계에 따라 도로 용량의 일시적 저하를 도출해 낸 소수 연구 중의 하나이다.
도시 가로에 AV의 도입으로 인해 발생하는 교통류의 변화와 운영 효율성에 관한 연구가 진행되고 있다. 그러나 대부분의 선행연구는 AV의 실제 운행 데이터를 이용하는 것이 아닌 문헌을 기반으로 하거나 임의의 주행행태 값을 가정하여 연구를 진행하였다. 따라서 본 연구는 AV와 HDV의 데이터를 실측, 취득하여 주행행태를 분석하고 AV의 MPR에 따른 신호교차로의 포화교통류율과 용량을 추정하고자 한다.
주행행태 데이터 분석 및 신호교차로 용량 산정
본 연구는 교통류 분석에서 이용되는 교통량, 속도, 밀도의 관계를 이용하여 AV의 혼입에 따른 신호교차로의 포화교통류율과 용량을 분석하였다. 연구의 수행과정은 방법론 선정, 데이터 수집, 데이터 전처리 및 분석, 포화교통류율 및 용량 산정에 대한 과정으로 구분되며, 연구의 수행과정은 Figure 1과 같다.
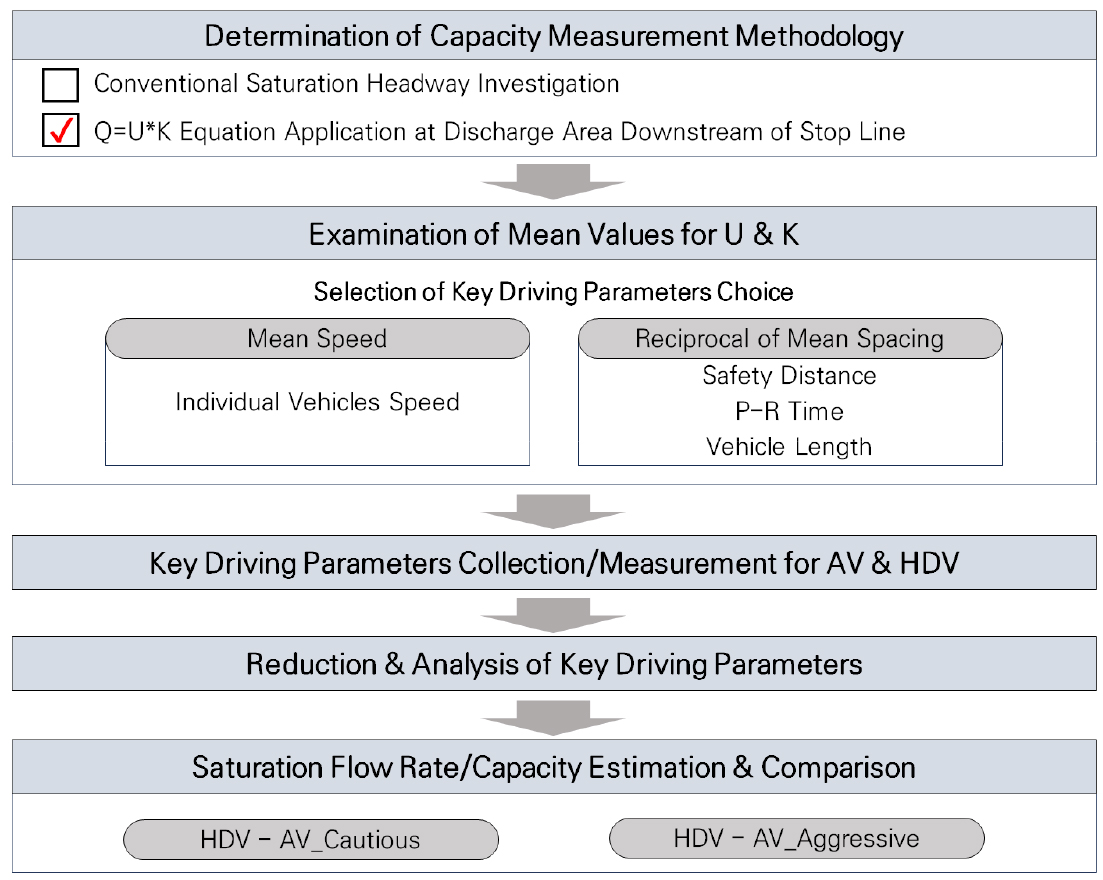
1. 주행행태 기반 교차로 용량 산정 모델
본 연구에서는 교통류 이론을 기반으로 신호교차로의 포화교통류율과 용량을 분석하고자 한다. 일반적으로 신호교차로의 용량은 포화차두시간을 이용하여 포화교통류율을 산정하나, 현재 운행 중인 AV의 포화차두시간에 대한 자료를 수집하는 데에 어려움이 따른다. 따라서, 본 연구는 차량의 주행행태를 이용하여 신호교차로의 포화교통류율 및 용량을 산정하였다.
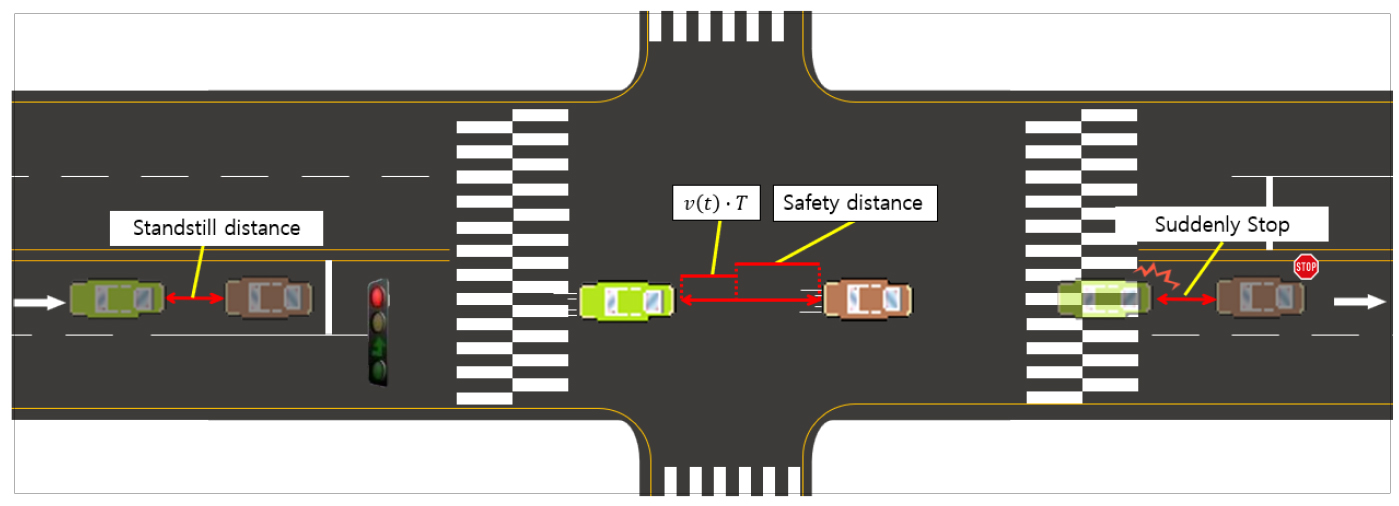
교통류 분석에서 이용되는 주요 변수는 교통량(), 속도()와 밀도()로 이들 사이에는 의 관계가 있다. 이때, 밀도는 전방 차량과의 시간적인 거리와 안전거리(safety distance), 차량의 길이(vehicle length)를 통해 나타낼 수 있다. 앞서 설명된 용량식은 Equation 1에 제시하였으며, 차량의 주행행태는 도식화하여 Figure 2에 나타내었다.
여기서, : Capacity
: Speed
: P-R time
: Vehicle length and safety distance
: green time ratio
Equation 2는 Equation 1에서 제시된 차량의 속도, 인지반응시간과 같은 차량의 주행행태를 AV와 HDV로 구분하여 나타낼 수 있다.
여기서, : AV MPR(%)
: AV speed
: HDV speed
: AV P-R time
: HDV P-R time
: AV vehicle length and safety distance
: HDV vehicle length and safety distance
본 연구에서는 인지반응시간, 차량의 속도, 안전거리 등 핵심 주행행태 값을 , 로 양분하여 정의하였다. 구체적으로 는 수집된 AV 주행행태 값들의 평균을 이용하여 정의하였으며, 는 주행행태 값 중에서 가장 우수한 값을 선택하여 정의하였다. 가장 우수한 값이란, 수집된 AV의 주행행태 값들(정지선 통과 속도, 인지반응시간, 안전거리) 중에 가장 빠르거나 짧은 값을 뜻한다. 그 밖에 수집된 AV의 주행 중인 선행 차량과의 인지반응시간과 안전거리는 측정 기술상의 어려움으로 도출할 수 없었다. 이에 본 연구는 대기행렬 내 정지 상태의 AV와 전후 차량의 관계를 이용하여 분석을 진행하였다.
2. 자율주행자동차 데이터 수집
본 연구에서는 AV의 주행행태를 분석하기 위해 실제 운행 중인 AV의 데이터를 취득하였는데, Choi(2023)에서 사용한 자료를 기반으로 추가 및 보완 조사를 더해 수집되었다. 데이터 취득은 현장에서 영상기록장치, 드론, probe car, 동승조사 방법을 이용하였고 자율주행 차량기록장치 데이터도 자료로써 활용하였다.
1) 대상지 선정
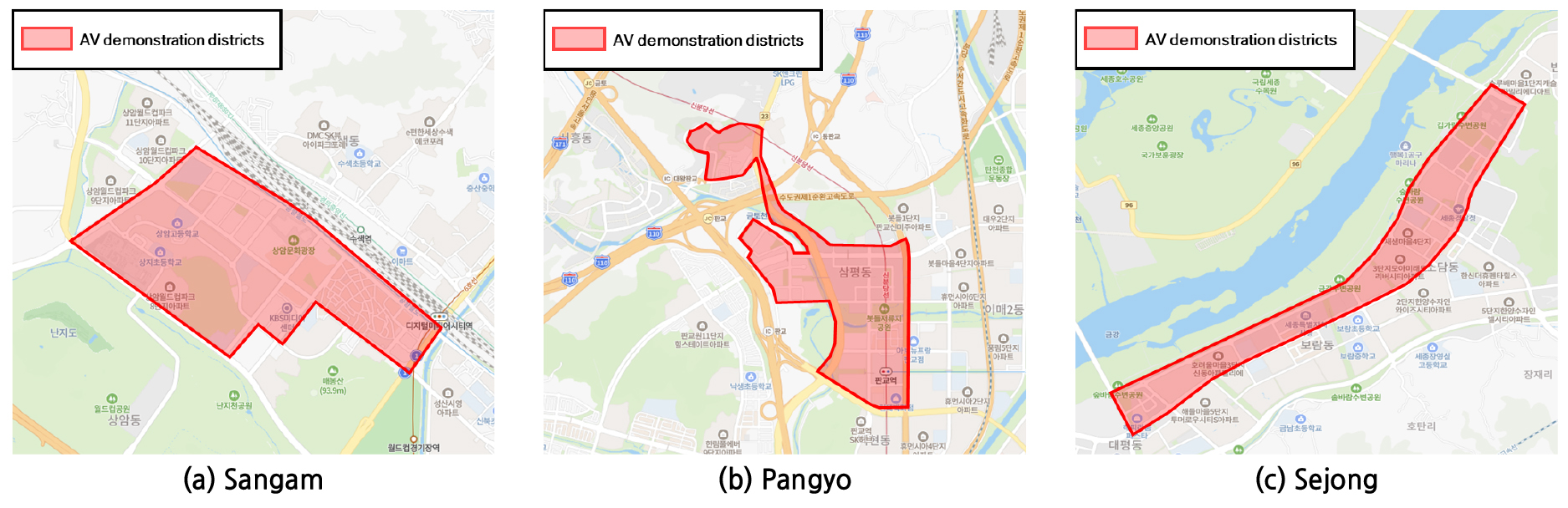
본 연구는 자율주행 시범운행지구에서 AV의 데이터 수집을 진행하였다. 시범운행지구는 AV의 연구와 시범운행을 촉진하기 위하여 규제 특례가 적용되는 구역을 의미하며 향후 AV의 안전한 상용화를 위한 실도로 테스트 베드로서 AV와 HDV가 혼재되어 주행하는 지구다(Lim et al., 2023). 2022년 5월 기준으로 지정된 7개의 자율주행 시범운행지구 중에서 교통류의 형태와 데이터 취득의 가능성, 운행 차종등을 고려하였으며, 상암, 판교, 세종 자율주행 시범운행지구를 대상지로 선정하였다. 대상지의 범위는 Figure 3에 제시하였다.
2) 현장 측정 데이터 수집
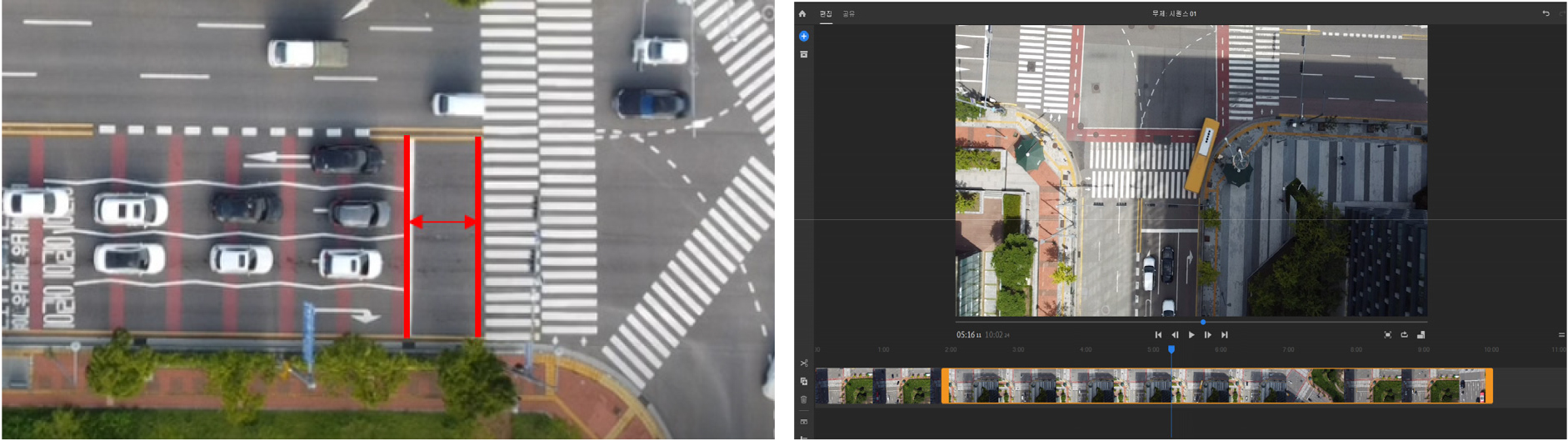
상암, 판교 자율주행 시범운행지구에서는 현장 측정을 통해 AV와 HDV의 영상데이터를 수집하였다. 데이터의 수집 일시는 2022년 5월부터 2023년 2월까지이며, 수집 횟수는 상암은 5회, 판교는 2회 진행하였다. 상암 자율주행 시범운행지구의 AV는 3개의 회사에서 시범운행을 진행하고 있으며, 총 5대가 운행되고 있다. 상암 시범운행지구는 3개의 운행 노선에서 2개의 노선은 택시 형태로 운행되고 있으며, 다른 1개의 노선은 버스 형태로 운행되고 있다. 판교 자율주행 시범운행지구의 AV는 1개의 회사에서 1대를 시범운행하고 있으며, 노선이 지정되어 있지 않은 자율형으로 운행되고 있다. 두 지역은 AV 운행 대수가 적어 표본을 수집하는 데에 어려움이 따른다. 이에 본 연구에서는 AV의 많은 표본을 수집하기 위해 영상기록장치와 드론을 이용하고, 추가로 probe car와 동승 조사를 통해 데이터를 취득하였다. 네 가지의 수집 방법은 Figure 4에 제시하였다.
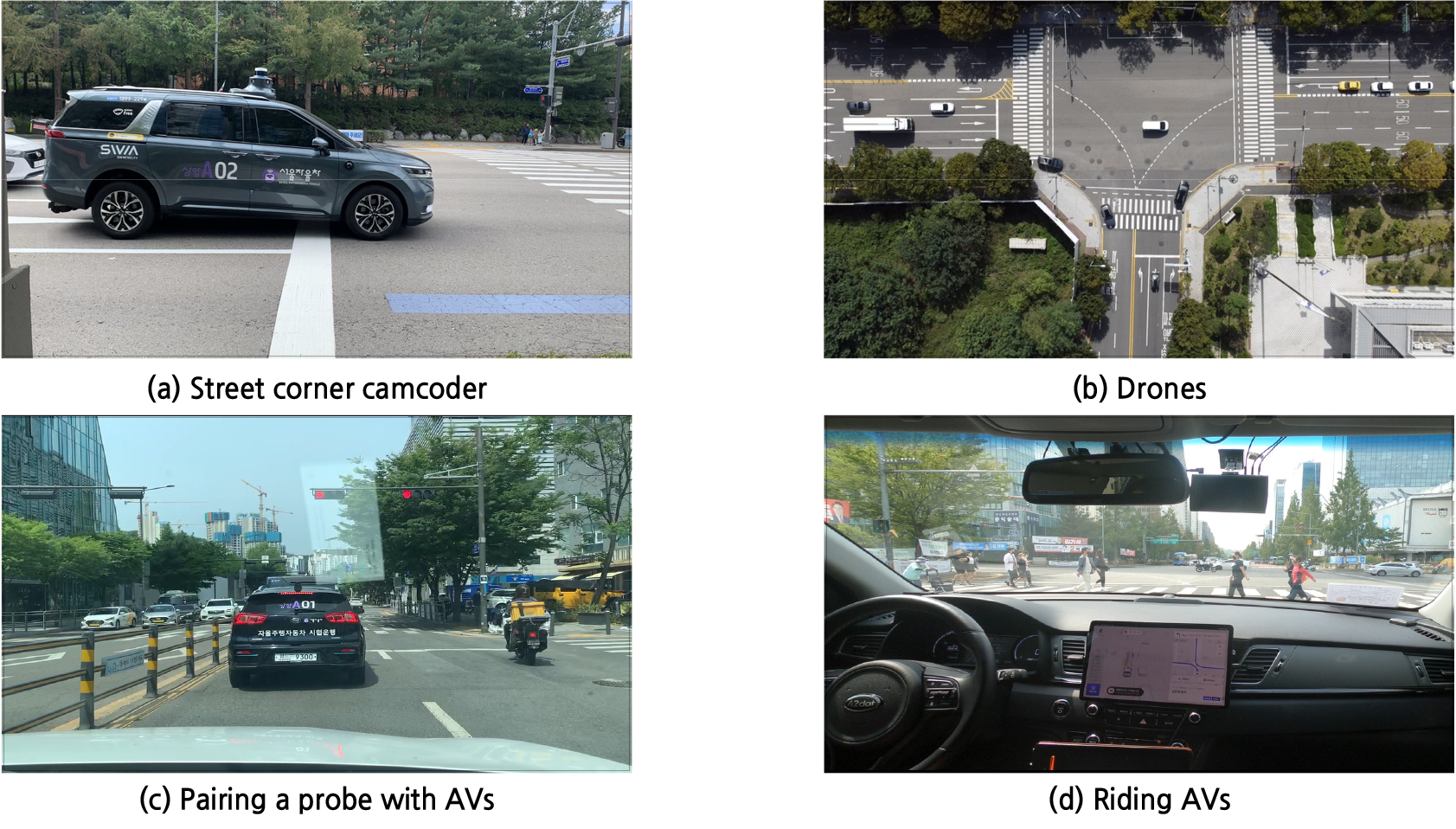
영상기록장치를 이용한 데이터 취득 방법은 신호교차로의 정지선 근처에서 영상기록장치를 설치하여 진행하였다. 드론을 활용한 방법은 고도 100m에서 영상 촬영을 진행하여 교차로의 데이터를 취득하였다. 영상기록장치와 드론을 이용한 방법은 지정된 신호교차로에서만 데이터를 얻을 수 있으므로 추가적인 조사 방법으로 동승 조사와 probe car를 이용하여 데이터를 취득하였다.
AV의 내부에는 차량의 속도뿐만 아니라 자율주행 모드 유무에 대한 데이터가 실시간으로 표시된다. 따라서, 내부에서 제공되는 데이터를 얻기 위해 AV를 직접 탑승하여 내부를 촬영하였다. probe car를 이용한 방법은 probe car 전·후방에 영상기록장치를 부착하여 운행 중인 AV의 영상데이터를 수집하였다.
3) 자율주행 기록장치 데이터 수집
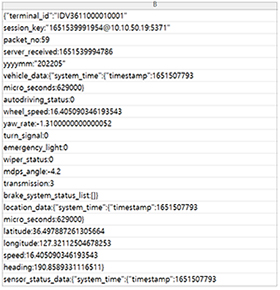
자율주행 기록장치 데이터를 이용하여 분석을 진행하기 위해 세종 자율주행 빅데이터 관제센터에서 수집되는 세종 테크노파크 AV의 자율주행 기록장치 데이터와 판교에서 운행 중인 제로셔틀의 자율주행 기록장치 데이터를 수집하였다. 세종 테크노파크 관제센터에서는 Open lab 방문을 통해 영상데이터 및 원시데이터로 구성된 자율주행 기록장치 데이터를 수집하였다. 판교 제로셔틀의 경우에는 공공데이터포털을 이용하여 원시데이터를 수집하였다. 세종 테크노파크 AV의 원시데이터는 차량 데이터, 위치정보, 센서 상태, 인지, 판단, 제어로 구분된다. 판교 제로셔틀의 데이터 항목은 세종 테크노파크 AV의 원시데이터 항목과 유사하며, 총 14개로 구성되어 있다. 세종 테크노파크 AV의 원시데이터 항목과 단위의 일부는 Table 1에 제시하였다.
Table 1.
Dataset and raw data example from Sejong TP AV
3. 자율주행자동차 주행행태 도출
본 연구에서는 AV의 주행행태 데이터를 도출하기 위하여 현장에서 수집된 영상데이터와 자율주행 기록장치 데이터를 이용하였다. 두 데이터의 도출 방법은 서로 상이하므로 이를 구분하여 주행행태를 도출하였다.
1) 현장 측정 데이터 도출
현장 측정을 이용한 데이터는 영상데이터로 구성되어 있으며, 이를 frame 별로 구분하여 인지반응시간, 정지선에서 신호에 대기 중인 차량의 안전거리(standstill distance), 차량의 속도, 출발손실시간을 분석하였다. 주행행태를 도출하기 위해 데이터 전처리를 진행한 자료는 Figure 5와 같다.
먼저, 인지반응시간은 차량이 정지선에서 신호에 반응하여 출발하는 인지반응시간과 앞차에 반응하여 출발하는 인지반응시간으로 구분하였다. 이러한 이유는 AV는 V2I(Vehicle to Infrastructure)를 이용하여 신호에 대한 정보를 인지한 후에 출발하는데, 이는 앞차에 반응하여 출발하는 인지반응시간과 작동하는 원리가 다르므로 인지반응시간의 차이가 존재하여 구분하였다. 따라서, 정지선에서 신호에 반응하여 출발하는 인지반응시간은 신호교차로의 신호등이 적색신호에서 녹색신호로 변경된 이후 차로군 첫 번째에 있는 차량이 출발하는 시간을 이용하여 분석하였다. 앞차에 반응하여 출발하는 인지반응시간은 선행 차량이 움직인 이후 후행 차량이 움직이는 시간 차이를 통해 도출하였다.
정지선에서 신호에 대기 중인 차량의 안전거리를 도출한 방법은 3가지의 방법을 이용하였다. 먼저, 드론을 이용한 영상데이터에서는 정지선에서 대기하고 있는 차량의 안전거리를 추출하였다. 두 번째는 probe car가 AV의 전방에 위치할 때, 후방을 촬영하고 있는 영상데이터를 이용하여 안전거리를 분석하였다. 마지막으로는 현장에서 거리측정기를 이용하여 정지하고 있는 차량의 안전거리를 측정하였다.
차량의 속도와 차두시간은 1-4번째와 4번째 이후 차량으로 구분하여 진행하였다. USHCM 7th라 불리는(TRB, 2022)에서는 신호주기에 있는 대기열에서 4번째 이후 차량부터 마지막 대기열에 있는 차량까지의 포화차두시간을 이용하여 포화교통류율을 측정하고 있다. 따라서, 본 연구에서는 이를 적용하여 속도와 차두시간을 1-4번째 차량과 4번째 이후 차량으로 구분하여 분석을 진행하였다. 차량의 속도는 정지선과 횡단보도의 시작 지점을 기준으로 차량이 통과하는 구간 속도를 분석하였다. 차두시간은 선행 차량이 정지선을 통과한 이후에 후행 차량이 정지선에 도착하는 시간 차이를 이용하였다. 출발손실시간은 도로용량편람(MOLIT, 2013)의 방법론을 준용, 정지선에서 대기하고 있는 1-4번째에 위치한 차량을 이용하여 분석하였다. 차량의 길이는 조사된 차량의 제원을 이용하였다.
2) 자율주행 기록장치 데이터 도출
자율주행 기록장치 데이터를 이용한 AV의 주행행태는 원시데이터와 영상데이터를 이용하여 분석을 진행하였다. 여기서 주행행태는 정지선에서 신호에 반응하여 출발하는 인지반응시간과 앞 차에 반응하여 출발하는 인지반응시간, 안전거리, 속도가 존재한다. 세종 테크노파크 AV와 판교 제로셔틀의 데이터 전처리 과정은 Figure 6에 제시하였다.
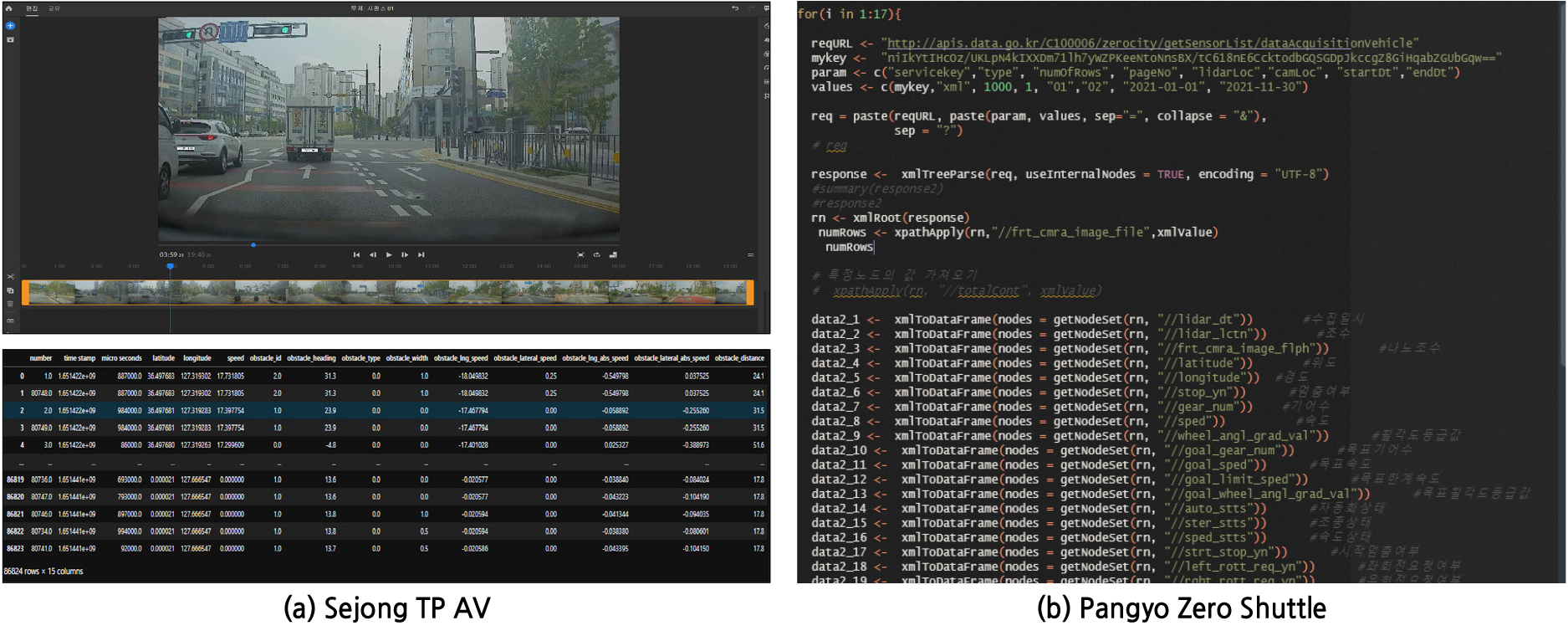
정지선에서 신호에 반응하여 출발하는 인지반응시간은 적색신호에서 녹색신호로 변경된 영상데이터 및 원시데이터와 timestamp와 속도를 이용하여 분석을 진행하였다. 앞 차량에 반응하여 출발하는 인지반응시간은 원시데이터 내에 앞 차량과의 거리를 나타내는 데이터와 timestamp 및 속도에 대한 데이터를 이용하였다. 속도는 위도와 경도를 이용하여 정지하고 있는 차량이 출발한 이후 횡단보도의 시작 지점에 위치하였을 때, 속도 데이터를 이용하여 도출하였다. 안전거리는 원시데이터 내에 전방 차량을 인식하는 조향각도 데이터와 앞 차량과의 거리를 나타내는 데이터를 이용하여 분석을 진행하였다.
3) 이상치 제거
본 연구에서는 AV의 주행행태 값 중에서 전체적인 패턴에서 벗어난 값을 제외하기 위해 사분위수 범위(IQR)를 활용하여 제외하였다. IQR은 사분위수 범위의 1.5배를 초과하는 관측치를 이상치로 정의하고 3배를 초과하는 관측치는 극단적 이상치로 정의하는 방법이다. 따라서, 이를 이용하여 수집된 주행행태 데이터 중에서 이상치에 포함되는 데이터를 제거하였다.
분석 결과
1. 주행행태 데이터 도출 결과
본 연구의 결과에서는 수집된 현장 측정 데이터와 자율주행 기록장치 데이터를 이용하여 AV와 HDV의 주행행태를 도출하고 주요 매개변수의 주행행태 값을 비교·분석하였다.
1) 현장 측정 주행행태 데이터 도출 결과
현장 측정 데이터에서 도출된 AV와 HDV의 주행행태 값은 Table 2에 제시하였다. 분석 결과, 정지선에서 신호에 반응하는 인지반응시간은 HDV 1.68초, 상암 AV 1.03초, 판교 AV 1.57초로 분석되었다. 이러한 결과는 AV가 신호에 대한 정보를 미리 전달받기 때문에 인지반응시간이 HDV에 비해 빠른 것으로 분석되었다. 반면, 앞 차에 반응하는 인지반응시간은 AV가 HDV에 비해 느린 것을 확인하였다.
Table 2.
Driving behavior parameters from the field measurement
차량의 안전거리는 AV가 HDV에 비해 길게 분석되었다. 이는 관계자와의 인터뷰 결과, 시범운행 중인 AV는 안정성을 우선으로 하고 있으므로 차량의 안전거리를 보수적으로 설정한 것을 확인하였다.
AV와 HDV의 차량의 속도를 도출한 결과, 정지하고 있는 차로군 1-4번째의 위치한 차량의 속도는 상암 AV 23.33km/h, 판교 AV 21.50km/h로 HDV에 비해 느린 속도를 가지는 것을 알 수 있었다. 차로군 5번째 이후에 있는 차량의 속도에서는 AV와 HDV가 유사한 속도를 가지는 것으로 분석되었다. 다만, 판교 AV는 차로군 5번째 이후 위치한 데이터가 존재하지 않아 속도를 도출하지 못하였다.
정지하고 있는 차로군 1-4번째의 위치한 차량의 차두시간은 상암 AV 3.95초, 판교 AV는 4.13초로 HDV에 비해 느린 것으로 도출되었으며, 차로군 5번째 이후 위치한 AV는 HDV와 유사한 값이 도출되었다. 판교 AV의 경우에는 데이터 취득 시 AV가 5번째 이후 차량이 존재하지 않아 5번째 이후 차량의 속도와 차두시간에 대한 데이터를 도출하지 못하였다. 상암 AV의 출발손실시간은 HDV에 비해 4.75초 느린 것을 확인하였다. 상암 AV와 판교 AV의 차량의 길이는 동일하였으며, HDV의 차량의 길이는 4.75m로 도출되었다.
2) 자율주행 기록장치 주행행태 데이터 도출 결과
자율주행 기록장치를 이용하여 세종 테크노파크 AV와 판교 제로셔틀의 주행행태를 도출한 값은 Table 3과 같다. 정지선에서 신호에 반응하는 인지반응시간은 세종 테크노파크 AV는 1.61초로 분석되었으나, 상암 AV는 각 데이터 항목에 오류 값들이 존재하여 도출하지 못하였다. 앞차에 반응하는 인지반응시간은 제로셔틀이 세종 테크노파크 AV에 비해 0.94초 빠른 것을 확인하였다. 세종 테크노파크 AV의 안전거리는 8.91m로 도출되었다. 판교 제로셔틀은 차량의 안전거리에 대한 원시데이터의 오류가 존재하여 도출하지 못하였다. 차로군 1-4번째 위치한 세종 테크노파크 AV의 차량의 속도는 취득된 HDV보다 빠른 속도를 지니고 있지만, 판교 제로셔틀은 HDV에 비해 느린 것을 확인하였다. 이는 판교 제로셔틀의 최대속도가 20km/h로 설정되어 있으므로 속도가 느리게 도출된 것으로 나타났다. 세종 테크노파크 AV와 판교 제로셔틀의 차로군 5번째 이후 위치한 차량의 속도는 도출하지 못하였는데, 이는 AV가 HDV의 운행에 미칠 수 있는 영향을 최소화 하기 위해서 되도록 교통량이 적은 시간대와 경로를 선택해서 운행하고 있어 정지선 상류 대기행렬 크기가 5대 이상이 되는 경우가 아주 적었기 때문인 것으로 파악되었다.
Table 3.
Driving behavior parameters from AV-generated driving data
3) 핵심 주행행태 매개변수 값의 분석 결과
자율주행 시범운행지구에서 취득한 데이터를 통해 도출한 AV와 HDV의 주행행태에 대한 값을 분석한 결과를 Table 4에 제시하였다. 분석 결과, 정지선에서 신호에 반응하여 출발하는 인지반응시간을 제외한 주행행태 값은 HDV가 에 비해 상대적으로 우수한 것으로 분석되었다.
Table 4.
Comparison of key driving behavior parameters for AV and HDV
정지선에서 신호에 반응하여 출발하는 인지반응시간은 가 HDV에 비해 0.23초 빠른 것으로 분석되었다. 이는 AV가 신호에 대한 정보를 사전에 전달받기 때문임을 확인하였다. 정지선에서 앞차에 반응하여 출발하는 인지반응시간은 가 2.35초로 HDV에 비해 느린 것으로 분석되었는데, 가 전방 차량이 이동하는 것을 인지하고 있으나, 차량과의 거리가 일정 거리 이상 되어야 주행을 시작하는 것으로 분석되었다.
동승 조사 시 관계자와의 인터뷰를 진행한 결과, AV는 안전성을 최우선으로 고려하고 있기 때문에 HDV에 비해 주행행태가 낮은 수준으로 설정되어 있음을 확인하였다. 이러한 이유로 분석 결과에서 의 1-4번째 속도는 21.79km/h로 HDV에 비해 13.26% 느린 것을 보여주었으며, 안전거리는 HDV에 비해 4.79m 긴 것으로 분석되었다. 따라서 낮은 주행행태를 지닌 는 출발손실시간이 HDV에 비해 큰 것을 확인할 수 있었다. 5번째 이후 차량의 차두시간과 속도에서는 유사한 값이 분석되었다. 의 주행행태에서는 HDV에 비해 높은 수준을 보이는 값이 분석되었다.
2. 포화교통류율 및 용량 분석 결과
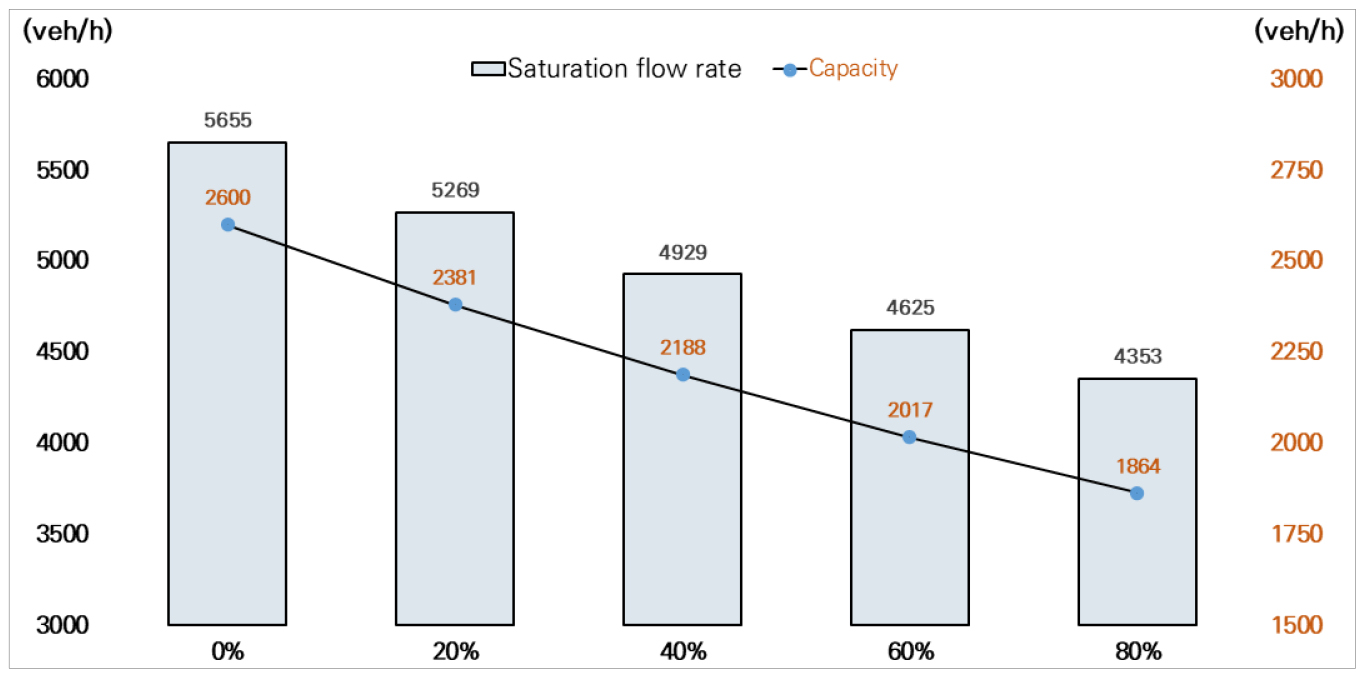
본 연구는 분석된 HDV와 , 의 주행행태 값을 활용하여 신호교차로에서 AV의 MPR에 따른 포화교통류율 및 용량을 분석하였다. AV의 MPR은 0%, 20%, 40%, 60%, 80%로 구성하였으며, 직진차로는 4차로, 신호 주기와 녹색시간, 진행연장시간은 각각 120초, 54초, 4초로 구성하였다.
Figure 7은 HDV와 의 주행행태를 활용하여 MPR에 따른 신호교차로의 포화교통류율과 용량을 제시하였다. 분석 결과, HDV로 구성되었을 때, 포화교통류율은 5,655대, 용량은 2,600대로 분석되었다. MPR이 0%에서 80%로 증가하는 경우에는 포화교통류율은 23.02% 감소하였으며, 용량은 28.31% 감소하였다. MPR이 증가할수록 포화교통류율과 용량은 감소하는 관계를 확인하였는데, 이는 의 주행행태 값이 HDV에 비해 성능이 낮은 값을 보이기 때문으로 분석되었다. 이 결과는 MPR의 증가가 시간의 경과 및 차량 성능의 개선, 즉 AV의 주행행태 값의 변화를 고려하지 않고 산정한 것이기 때문에 유의를 요한다.
HDV와 의 주행행태 값을 활용하여서도 신호교차로의 포화교통류율과 용량을 추정하였으며, 이는 Figure 8에서 확인할 수 있다. 의 MPR이 0%에서 80%로 증가하는 경우, 포화교통류율은 30.48% 증가하였고 용량은 21.5% 증가하였다. HDV에 대비한 의 안전거리는 길지만 인지반응시간은 작아지므로 MPR에 비례해서 용량이 증가하는 것을 확인할 수 있었다. 이러한 이유는 인지반응시간이 용량 값 산정에 더 큰 영향을 미친 것이기 때문으로 파악된다.
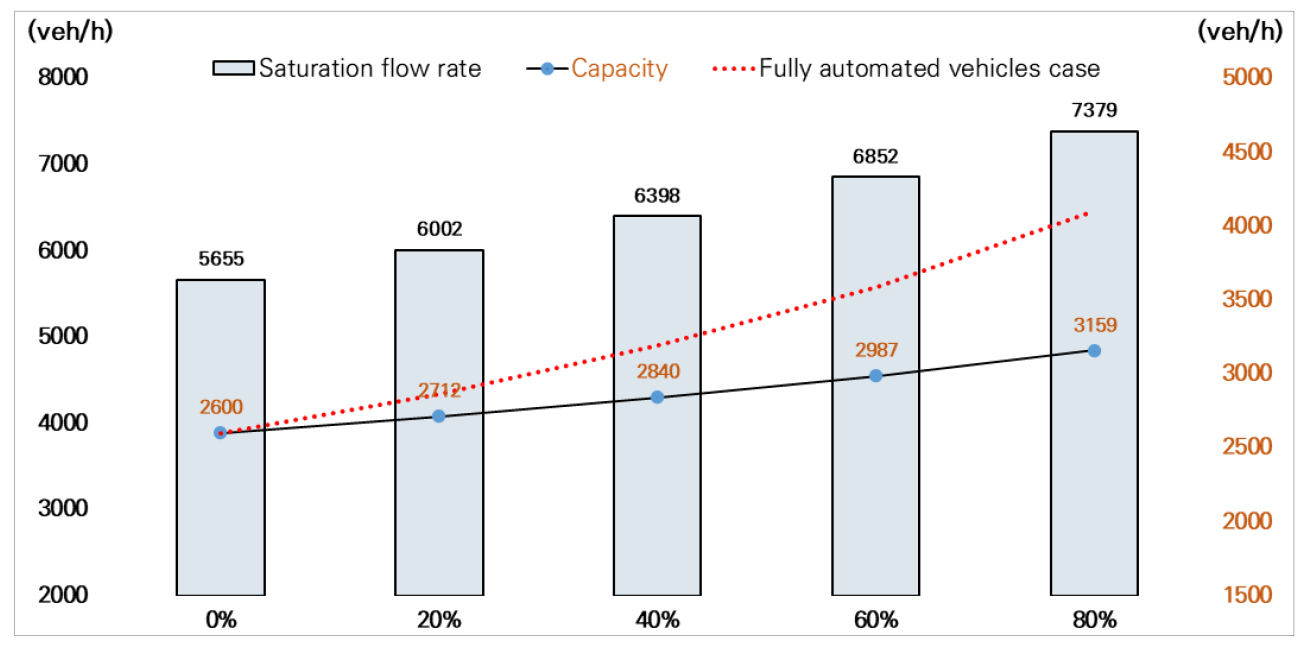
Mckinsey(2023b)의 따르면 전체 자동차 판매량 중 AV의 판매량을 낙관적으로 예측하였을 때, 2030년에는 20%, 2035년에는 57%로 추정되었다. Go(2023)는 이를 활용하여 시간의 경과에 따른 AV의 MPR을 분석하였으며, 현재 운행 중인 AV보다 우수한 주행행태를 가진 AV의 MPR이 2041년에는 20%, 2049년에는 40%에 도달할 것이라고 예측하고 있다. 따라서 시간이 지남에 따라 증가하는 AV의 MPR은 도로 용량을 증대시킨다고 할 수 있다.
포화교통류율 값은 정지선 이후 discharge area에서의 차량의 속도와 밀도 값의 평균을 사용하여 산정하는 것이기 때문에 충분한 길이의 대기행렬 조사와 측정을 통해서 평균값(특히 속도)을 결정해야 한다. 하지만 여기에서 비교된 값들은 현장에서 극소의 대기행렬만 존재하는 가운데 측정된 것들이기 때문에 대기행렬 후반부 차량의 높은 통과속도가 반영되지 않았고, 이점 때문에 상당히 낮은 포화교통류율 값을 보인다는 점도 환기하고자 한다.
결론
본 연구는 AV의 혼입에 따른 도시 가로에 대한 변화를 분석하기 위해 자율주행 시범운행지구를 대상으로 현장 측정과 자율주행 기록장치를 통해 AV와 HDV의 주행행태를 수집하였다. 이후 HDV와 , 로 데이터를 구분하여 주행행태를 비교·분석하고 MPR에 따른 신호교차로의 포화교통류율 및 용량 변화를 분석하였다.
분석 결과, 는 HDV보다 낮은 수준의 주행행태 값이 도출되었으며, 가 신호교차로에 혼입되었을 때 도시 가로에 부정적인 영향을 미치는 것을 확인하였다. 이는 현재 운행되고 있는 많은 가 안전성을 최우선으로 고려하고 있어 보수적인 주행행태 파라메터 값을 기반으로 운행하기 때문인 것으로 분석되었다. 다만, 를 적용하여 분석한 결과에서는 포화교통류율과 용량이 증가함을 발견하였다.
현재 시범운행 중인 AV는 주행행태가 보수적으로 설정되어 도로 소통에 대한 문제를 야기하고 있다. 따라서 AV와 HDV의 혼재를 위해서는 센서, LiDAR 등 AV에 탑재되는 장치의 성능이 보완되어야 하며, OTA(Over-the-air)와 같은 기술을 이용하여 AV의 브레이크 담력, 가속도, 인지반응시간 등 소프트웨어의 성능이 발전되도록 해야 할 것이다. 향후 AV는 기술 개발과 성능 개선을 통해 사람, 신호, 노면, 표지판 등을 인지하여 안전성이 향상되고 와 유사하거나 더 높은 수준의 주행행태를 보일 것이며, AV의 성능과 점유율이 증가함에 따라 도시 가로의 용량을 증대시킬 것으로 분석된다.
본 연구는 다음과 같은 한계를 가진다. 먼저, 취득된 AV의 표본의 수가 적다. 이러한 이유는 현장 측정을 통한 데이터 취득은 상당한 인력과 시간, 비용이 소요되고 자율주행 기록장치 데이터는 데이터 간의 형식이 서로 다르므로 주행행태를 수집하는 것이 어렵기 때문이다. 따라서, 향후 진행될 자율주행 리빙랩과 같이 AV의 시범운행 대수가 많은 지역에서 현장 측정이 진행되어야 하며, 데이터 국가표준을 통해 형식이 규정된 데이터를 취득할 필요가 있다. 두 번째, HDV의 일부 주행행태 값의 표본이 적기 때문에 이를 보완할 필요가 있다. 인지반응시간에 관한 연구(Gazis et al., 1960; Parsonson, 1983; Ranjitkar et al., 2003; Setti et al., 2006)를 살펴보면, 1960년 약 1.5초에서 2006년 1.0초로 점차 감소하는 추세에 있다. 또한, Roess(2011)에 의하면 신호교차로에서 사용하는 대표적인 acceleration wave의 속도는 약 1.34초지만, Khan et al.(2018) 등이 교차로 하류부의 충격파를 분석하여 제시한 정지선에 대기하고 있는 차량의 인지반응시간은 0.94초로 다소 작은 값이기도 하다. 따라서, 향후 연구에서는 HDV의 해당 파라미터의 신뢰성 제고를 위해서 표본 수를 확대해야 할 것이다. 마지막으로는 주행 중인 차량의 데이터를 측정하는 것이 어렵기 때문에 본 연구에서는 정지선에 대기하는 차량의 데이터를 취득하였다. 향후 연구에서는 교차로의 하류부를 벗어난 시점에서 주행 중인 차량의 인지반응시간과 안전거리를 취득하여 연구를 진행할 필요가 있다.
본 연구는 실측된 AV의 주행행태를 이용하여 신호교차로의 용량을 산정한 것에 의의가 있으며, 향후 단속류에서 AV 혼입 시 용량 산정에 관한 연구에 기초자료로 활용될 수 있을 것으로 판단된다.
