

서론
기존 문헌 고찰
1. 가변형 속도제한시스템 관련 문헌 고찰
2. 속도 관리 전략 운영에 따른 운전자 순응도 관련 문헌 고찰
3. 기존 연구와의 차별성
연구 방법론
1. 연구 흐름도
2. 활용 데이터
3. 교통 패턴 기반 VSL 시스템 운영 효과 평가지표
4. 가변형 속도제한시스템 영향권 분석
연구 결과
1. 기상 조건별 VSL 시스템 영향권 식별 결과
2. VSL 시스템 영향권 기준 VSL 시스템 운영 효과 평가
연구 결론
서론
속도는 운전자의 안전뿐만 아니라 도로 안전관리 정책 수립에 영향을 미치는 중요한 요소 중 하나이다(Yadav and Velaga, 2021). 특히, 악천후 기상 조건은 정상적인 기상 조건과 다르게 운전자의 주행행태에 부정적인 영향을 미쳐 부적절한 속도 선택을 야기할 수 있다. Yasanthi et al.(2022)는 노면 포장 상태와 강수량은 주행속도 선택에 영향을 미치고, 이를 통해 노출될 사고위험도가 달라진다고 평가하였다. Gao et al.(2020)은 안개 상황 시 가시성 감소가 충돌 위험과 차량 추종 행동에 미치는 영향을 조사하였고, 안개 조건에서 운전자의 평균 반응 시간과 속도 변화가 더 길었다고 밝혔다. 또한, 악천후 기상 조건(강우, 눈, 강풍, 안개 등)은 가시성뿐만 아니라 차량 타이어와 도로 표면 사이의 마찰을 감소시키므로 적절한 속도제어가 필요하다(Khattak et al., 1998; Pavlou et al., 2023; Guo et al., 2022). 또한, 악천후 기상 조건은 도로 정체를 일으키고 고속도로 주행 안전에 심각한 잠재적 안전 위험을 초래할 수 있으므로, 이에 실시간으로 대응할 수 있는 능동형 교통관리 전략을 활용한 안전대책 수립이 필요하다. 능동적 교통 관리 전략 중 하나인, 가변형 속도제한(VSL, Variable Speed Limit) 시스템은 기하구조, 교통. 기상 조건에 따라 고속도로 구간의 속도 제한을 조정함으로써 차량간 및 차로 간 속도 편차를 감소시켜 사고를 예방하고 총 지체를 최소화하는 기법이다(Ma et al., 2021; Lee et al., 2019). VSL 시스템은 실시간으로 수집되는 교통 상황과 기상정보를 기반으로 도로 상황에 따라 유연하게 제한속도를 조정하여 안전운전을 지원할 수 있다는 이점을 가지고 있다(Kim et al., 2024). 또한, 교통사고 자료를 기준으로 VSL 시스템 운영 효과를 평가하였을 때, 시행 이후 사고 빈도 및 후미 추돌 사고가 감소하였고, 이를 통해 VSL 시스템 도입은 도로 안전성을 개선하는 효과가 있음을 확인하였다(Pu et al., 2020). 이외에도, 현실과 유사한 가상의 교통환경을 활용하여 운영 효과를 평가하였을 때, VSL 시스템 운영 시 교통 안전성, 운영 효율성, 환경성 관련 평가지표 결과가 개선되었고 선제적 교통 안전관리 전략으로 VSL 시스템 적용의 필요성을 시사하였다(Choi and Oh, 2016; Dai et al., 2022). 이러한 이점을 바탕으로 고속도로 상 VSL 시스템 운영에 관한 관심이 증가하고 있지만, 제공된 속도 정보에 대한 운전자의 순응도가 VSL 시스템 운영 효과에 미치는 영향과 관련된 연구는 미미하다. 속도제어 또는 속도 단속전략을 통해 변경된 제한속도에 대해 운전자는 제공된 정보가 신뢰할 만하다고 인식될 때 속도를 준수하는 경향이 있으므로(Lee et al., 2017), VSL 시스템 운영 전/후 운전자의 주행행태 변화를 추적하여 제한속도 변화에 대한 신뢰성을 평가할 필요가 있다. 하지만 시뮬레이션 환경 내 VSL 시스템을 구현한 대부분의 연구와는 달리, 일부 연구에서만 실제 교통환경에서 VSL 시스템 운영에 대한 운전자의 준수에 관한 영향을 조사하였다(Hellinga and Mandelzys, 2011; Riggins et al., 2016).
이에 본 연구의 목적은 악천후 기상 조건에서 안전한 운전 환경을 유지하기 위해 고안된 속도 관리 전략인 가변형 속도 제한 시스템이 설치된 서해안 고속도로의 일부 도로구간을 대상으로 가변형 속도제한 시스템 운영에 따른 속도 분포의 시공간적 변화를 기반으로 운전자의 준수 여부를 평가하고자 하였다.
기존 문헌 고찰
1. 가변형 속도제한시스템 관련 문헌 고찰
대부분의 가변형 속도제한시스템과 관련된 연구들은 실제 교통환경이 아닌 현실과 유사한 가상의 교통환경을 바탕으로 속도제어 알고리즘 설계하고, 운영 효과를 평가하였다. Choi and Oh(2016)은 예측된 날씨와 교통 상황에 따른 새로운 VSL 운영 전략을 제안하기 위해 미시적 교통 시뮬레이션 프로그램 VISSIM의 API를 사용하여 알고리즘을 개발하였다 그 결과, 제안된 알고리즘의 전체 교통사고는 VSL 적용 시 심한 안개 상황에서 27.27% 감소한다고 평가하였다. Kim et al.(2025)은 강화 학습을 기반으로 실시간 사고위험도 증/감율에 따라 권장 안전 속도 정보를 도출하는 VSL 시스템을 구현하였고 시뮬레이션 환경을 통해 검증하였다. Kang et al.(2024)는 자율주행 차량이 혼재된 혼합 교통류 환경에서 적용할 수 있는 속도제어 알고리즘을 개발하였고, 자율주행 차량 보급률이 50% 조건에서 교통 안전성과 운영 효율성이 각각 53%와 59% 향상된 결과를 보였다. Abdel-Aty and Wang(2017)은 교통 시뮬레이션을 통해 고속도로 진/출입구가 포함된 엇갈림 구간이 포함된 네트워크 구축 및 도로 구간을 세분화하여 VSL 시스템의 효과를 평가하였다. 그 결과, 상류 구간에 설치된 VSL 시스템의 제한속도 크기를 낮게 설정하였을 때 안전성이 크게 개선됨을 시사하였다. 시뮬레이션 환경이 아닌 실제 데이터를 이용하여 VSL 시스템의 효과를 평가한 경우, 주로 사고 데이터를 활용하였고 교통류 특성을 비교하는 연구는 미비하였다. 그리고 신뢰성 있는 효과평가를 수행하기 위해 VSL 시스템 설치 전/후 기간 3년 이상 집계된 자료를 사용하였다(Pu et al., 2020; Gaweesh and Ahmed, 2020). 또한, VSL 시스템에 대한 운전자의 순응도를 평가한 연구에서는 루프 감지기에서 수집된 교통흐름을 바탕으로 평가하였고. 주행속도 크기뿐만 아니라 추가적인 평가지표를 고려하여 제한속도 준수 여부를 평가할 필요가 있다(Riggins et al., 2016).
2. 속도 관리 전략 운영에 따른 운전자 순응도 관련 문헌 고찰
운전자의 속도 위반행태를 포착하는 속도 단속 방법의 발전에 따라, 이에 대한 영향효과를 분석하는 것이 중요하다. 구체적으로, 운전자의 속도 선택에 대한 주행행태의 변화는 속도 단속 카메라의 위치 주변에서 포착할 수 있다(Zhou et al., 2019). 일부 문헌에서는 속도 단속 관리전략의 영향효과를 시·공간적 차원으로 확장하여 분석하였고 각각 ‘Time halo effect’, ‘Distance halo effect’ 및 ‘Spill over effect’로 구분하였다(Fu and Liu, 2023; Hauer et al., 1982; Zhou et al., 2019; Vanlaar et al., 2014). ‘Time halo effect’는 단속이 종료된 후에도 일정 기간 속도 억제 효과가 지속되는 현상에 관한 분석으로, 분석 결과의 일관성이 부족하다는 한계가 존재한다(Vanlaar et al., 2014). ‘Distance halo effect’는 단속 지점 전후로 속도 억제 효과가 나타나는 공간적 범위에 대한 주행행태 변화를 포착하는 것을 의미한다. Fu and Liu(2023)는 자동 속도 단속 카메라 설치구간 내 주행행태 변화를 공간적인 패턴을 식별하기 위해 ‘Distance halo effect’ 분석을 수행하였고, 속도 단속 카메라의 불분명한 영향권 범위를 설정하기 위해 클러스터링 분석을 수행하였다. 연구 결과, 주행속도의 변화를 기준으로 속도 단속 카메라의 영향권 범위를 설정하였고, 주중 및 주말에 따라 영향권에 따라 유의미한 주행행태 차이가 있었다. ‘Spillover Effect’는 특정 구간에서의 속도 단속이 인접한 다른 도로 구역에까지 영향을 미치는 현상을 의미하고, 이동식 속도 단속 카메라 운영 시 단속 위치가 불확실하므로 운전자들이 더 광범위한 지역에서 속도를 줄이는 경향이 있다(Keall et al., 2001). 또한, 속도 단속 카메라 또는 통과 시, 운전자의 주행행태 변화가 관찰되지만, 이에 대한 영향권의 크기는 명확하지 않다. 부적절한 속도 단속 카메라의 영향권 설정 시, 운전자의 제한속도 순응도 평가에 있어 오류가 발생할 수 있고 속도 제한 신뢰성이 저하될 수 있다. Yoon et al.(2017)은 생존 분석을 사용하여 과속 방지턱의 영향권을 정의하였고, 영향권 내 주행속도는 제한속도를 초과하지 않았으며, 이는 과속 방지턱이 교통 정온화 효과가 있음을 나타냈다. Chung et al.(2023)은 어린이보호구역 내 단속 카메라의 영향권과 인접 구간 간 주행행태를 비교하여 단속 카메라가 설치된 어린이 보호구역의 교통 안전성 개선방안에 대해 시사점을 도출하였다.
3. 기존 연구와의 차별성
대부분 VSL 시스템 관련 기존 연구들은 가상의 시뮬레이션 환경을 활용하여 속도제어 알고리즘을 개발하였다. 그리고 VSL 시스템 효과평가 시, 주로 사고빈도 및 심각도 등 교통 안전성 관점으로 비교·분석을 수행하였다. 또한, VSL 시스템뿐만 아니라 속도 관리전략에 관한 실 운전자의 주행행태의 변화를 분석한 연구는 주로 국외 연구로, 국내 교통환경을 고려한 연구는 거의 없다. 따라서, 본 연구는 루프 검지기를 통해 수집되는 동적 교통 데이터를 활용하여 기상 대응형 VSL 시스템의 운영이 교통흐름에 미치는 영향을 확인하였다.
연구 방법론
1. 연구 흐름도
국내 고속도로에 설치된 VSL 시스템 중 서해안 고속도로의 서해대교에 설치된 VSL 시스템 운영 시간 동안 루프 검지기에서 집계된 교통 데이터를 활용하여 악천후 기상 조건별 VSL 시스템 운영에 따른 교통 특성 변화를 분석하였다. VSL 시스템의 영향을 받는 도로구간의 공통적인 교통 특성을 고려하기 위해 비지도 학습인 K-means Clustering 알고리즘을 사용하였고, 식별된 영향권에 따라 VSL 시스템 운영 전/후의 주행행태 변화를 비교분석하였다. Figure 1은 본 연구의 흐름도를 나타낸 것이다.

2. 활용 데이터
국내 고속도로 중 서해안 고속도로 내 서해대교에 VSL 시스템이 설치된 도로구간은 당진 나들목부터 서평택 분기점까지 기상 조건에 따라 가변형 속도 제한 시스템을 시행하고 있다(Figure 2). 해당 구간은 해상 교량에 설치된 형태로 다른 도로구간에 비해 기상 및 구조적 진동과 같은 외부 요인의 영향이 교통안전에 큰 영향을 끼친다. 구체적으로, 교량 내 수평 진동이 증가함에 따라 사고위험도가 커져 운전자에게 적절한 속도 정보를 제공하는 것이 중요하다(Chen et al., 2021). 한국도로공사에서 제공한 2022년부터 2023년 8월까지의 기상 조건별(강우, 안개, 강설 및 결빙, 강풍) VSL 시스템의 운영 이력은 Figure 2와 같고, 가변형 제한속도의 크기는 80km/h로 조정된 경우의 이력만을 사용했다. 활용한 운영 이력 중, 운영 시간이 15분 이하인 경우와 운영 횟수가 적은 강설 및 결빙, 강풍 기상 조건하에서 운영된 경우는 분석에서 제외하였다. Table 1은 VSL 시스템의 운영 시간에 관한 기초 통계량이다. VSL 시스템이 설치된 도로구간 상 루프 검지기를 통해 수집되는 교통류 데이터를 활용하였고, 데이터 집계 단위는 관련 문헌을 참고하여 5분/ 검지기 설치 간격 단위로 검지기 데이터를 집계하였다(Yang et al., 2023).
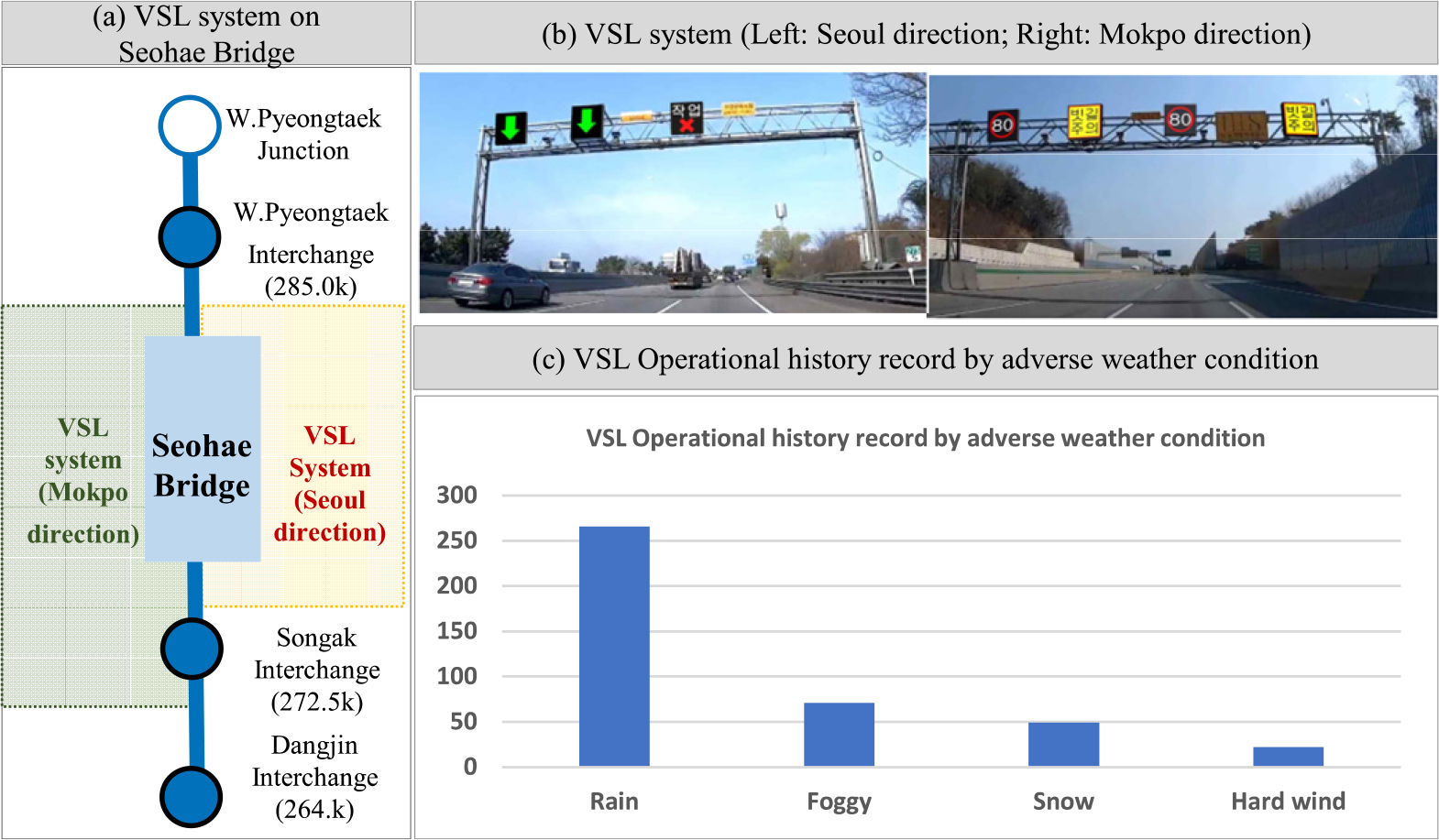
Table 1.
Descriptive statistics on VSL system operation time
| Descriptive characteristics | Mean | Median | Standard deviation | Min | Max |
| Value (minute) | 324 | 216 | 299.605 | 17 | 1371 |
3. 교통 패턴 기반 VSL 시스템 운영 효과 평가지표
주행 안전성 및 교통 안전성을 평가하기 위해 다수의 문헌은 속도 기반의 평가지표를 사용하고 있다(Pawar et al., 2024; Abdel-Aty et al., 2012). 속도 관련 매개변수에는 평균 속도, 속도 변동성, 제한속도 초과 여부 등의 지표가 포함된다. Pawar et al.(2024)은 다양한 운전 환경에서 게시된 속도제한에 따른 운전자의 순응도를 평가하기 위해 속도위반을 평가할 수 있는 지표로써 제한속도와 주행속도의 속도 차이 크기와 편차 지표를 활용하였다. 다른 문헌에서는 속도 관리 전략 적용에 따른 운전자의 순응도를 평가하기 위해 속도 프로파일 자료를 기준으로 속도 단속 카메라 통과 전·후의 평균 속도 크기의 변화 및 제한속도와의 속도 차이 지표를 활용하여 게시된 제한속도 준수 여부를 평가하였다(Fu and Liu, 2023; Yoon et al., 2017; Chung et al., 2023). 관련 문헌들을 참고하여, 본 연구에서 VSL 시스템 효과 평가를 위해 활용한 평가지표는 Table 2에 나타냈다.
Table 2.
Descriptive statistics on VSL system operation time
| Variable name | Description | Formula | Reference |
| Spd | Average travel speed at road segment | (km/h) | Hauer et al.(1982) |
| Spddifference | Speed Difference between upstream and downstream | (km/h) | Wang et al.(2020) |
| Delta Spd | Speed difference between average speed and speed limit | (km/h) | Fu and Liu(2023) |
4. 가변형 속도제한시스템 영향권 분석
다양한 교통 환경에서 시행된 속도 관리전략에 따른 시공간적 변화를 구분하기 위해 비지도 학습인 클러스터링 분석을 수행하였다(Fu and Liu, 2023; Liu et al., 2023; Zhang et al., 2014; Shang et al., 2022). Liu et al.(2023)은 속도위반 평가지표(주행속도와 제한속도의 크기 차이)를 기준으로 교차로에서의 자동 속도 단속 카메라의 영향권 범위를 정량화하기 위해 K-means 알고리즘을 활용하였다. 연구 결과, 속도 단속 카메라 배치 간격이 작을수록, 상류부의 거리 후광 효과(Distance halo effect)의 영향권 크기가 증가하였다. Mondal and Rehena(2019)는 교통 밀도와 차량의 평균 속도를 기준으로 K-means 클러스터링 기법을 사용하여 교통 체증 패턴을 식별하고, 이를 기반으로 도로구간을 4가지 유형으로 분류하였다. 본 연구에서도 악천후 기상 조건에서 VSL 시스템 운영이 공간적으로 미치는 영향권의 거리 후광 효과를 조사하기 위해 K-means 클러스터링 분석 기법을 사용했다. K-means 알고리즘은 클러스터 내부의 응집도 및 클러스터 간 차이를 극대화하기 위해 데이터를 ‘k’개의 군집으로 구분하는 것을 의미한다(Bishop and Nasrabadi, 2006). 유클리디안 거리(Euclidean Distance)를 기준으로 가장 가까운 클러스터에 데이터가 할당되고, 각 클러스터의 중심값을 업데이트하는 과정을 반복함으로써 데이터가 분류된다. K-means 알고리즘의 과정은 Equation 1, Equation 2, Equation 3으로 나타낼 수 있다(Bishop and Nasrabadi, 2006).
여기서, = 목적함수로, 군집 내 분산 또는 거리의 제곱합
=번째 클러스터
=데이터 포인트
= 번째 클러스터의 중심값(centroid)
=데이터 포인트 와 클러스터 중심 사이의 거리 유사도
연구 결과
1. 기상 조건별 VSL 시스템 영향권 식별 결과
클러스터링 방법을 사용하여 악천후 기상 조건별 VSL 시스템 운영 시 공통적인 교통 변화에 따라 VSL 영향 도로구간을 구분하였다. Figure 3은 방향(E/S)별 악천후 기상 조건 시 VSL 시스템 운영구간 영향권 구간 개수, 즉 최적의 클러스터 개수를 도출하는 과정이다. 방향/ 기상 조건별 최적의 군집 개수는 Elbow method 기법을 사용하였고, 이 기법은 각 클러스터 내의 데이터 포인트들이 클러스터의 중심(centroid)과의 거리 유사도를 기준으로 클러스터 개수를 도출할 수 있다. 특정 클러스터 개수일 때, 군집 내 총제곱합 감소율이 급격히 완화되는데 이 지점의 클러스터 수를 최적의 k로 설정하였다. S 방향의 안개 조건 시 VSL 시스템 운영 상황을 제외한 나머지 3개의 경우의 영향권은 3개의 도로구간으로 식별되었다. 반면 S 방향의 안개 조건에서는 4개 도로구간으로 영향권이 식별되었다.
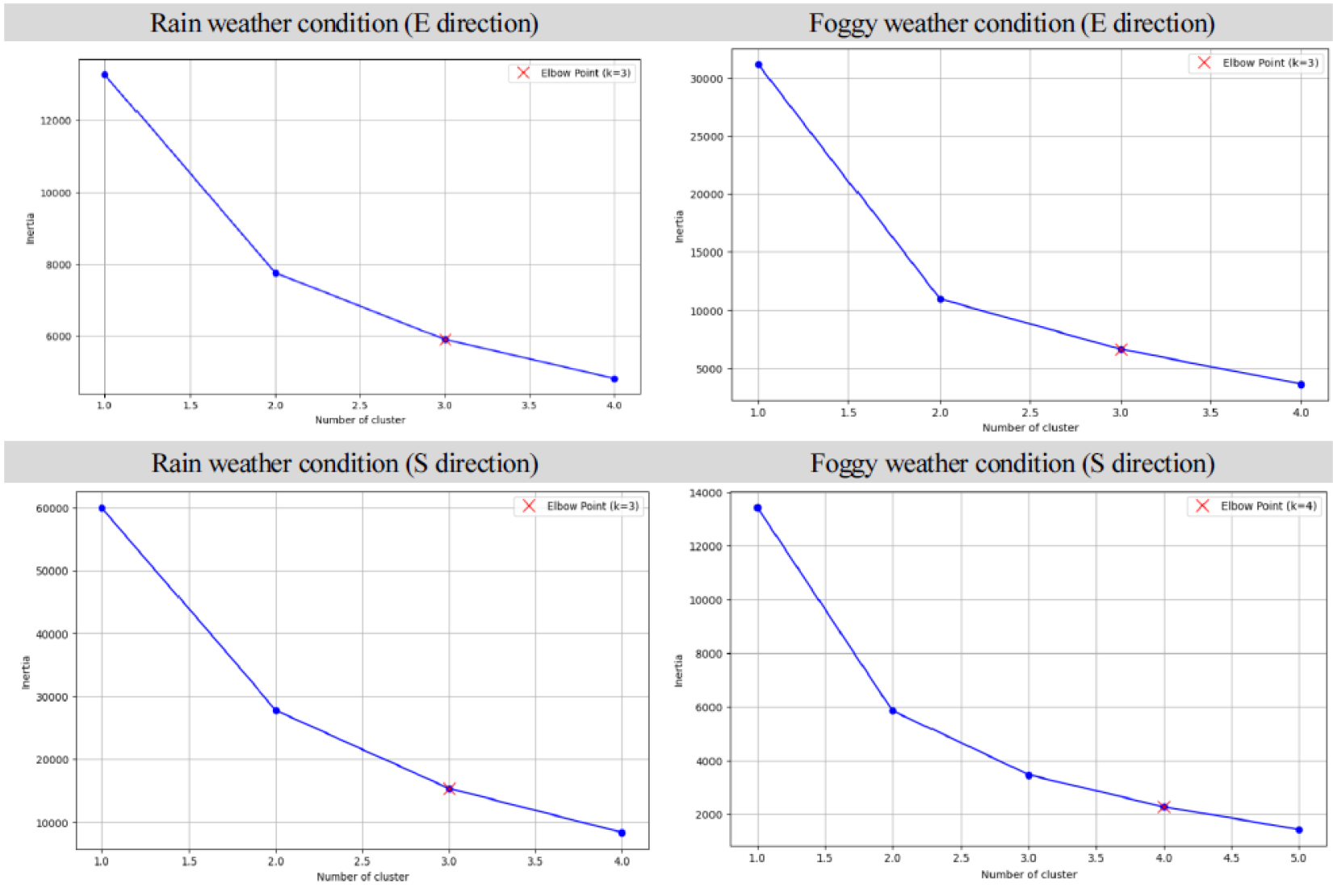
Figure 4는 VSL 시스템(E 방향) 교통 표지 등화에 따른 VSL 시스템 영향권별 교통 특성결과를 나타냈다. E 방향 VSL 시스템 운영 시, 평균 통행속도(Spd)와 통행속도와 제한속도와의 차이(Delta Spd) 교통 특성에 의해 총 3개의 영향권 구간이 식별되었다. 강우 및 안개 조건에서 모두 VSL 시스템 설치 구간 중 Cluster label이 ‘0’인 구간은 VSL 시스템 상류부 또는 VSL 시스템 운영이 종료되는 하류부 구간에 분포하고, 이 구간의 통행속도는 개시된 제한속도(제한속도 크기: 80km/h)보다 높은 특성이 나타났다. Cluster label 이 ‘1’인 구간은 ‘Delta speed’ 지표가 음의 부호를 가지는데, 이것은 제한속도보다 낮은 주행속도로 주행하는 것을 의미하고 운전자의 제한속도 준수하기 위해 감속하는 것으로 평가된다. 이것은 속도 단속 카메라 설치 위치에 따른 차량의 주행행태 변화에 관한 기존 연구의 결과와 유사하다(Fu and Liu, 2023; Shim et al., 2015a). 운전자가 속도 단속 카메라 설치 지점 통과 시, 설치 지점 상류부가 통과 지점보다 높은 통행속도와 분산이 관측되기 때문에, 이에 대한 추가적인 교통안전 관리전략이 필요하다(Shim et al., 2015a). Table 3은 영향권 구간별 교통 특성의 평균값을 의미하고, 구간별 교통 특성은 평균적인 차이가 통계적으로 유의미하다는 것을 확인하였다. 구체적으로 Table 3 중 VSL 시스템 운영 구간 내 중간 도로구간인 ‘Cluster 1’에서 가변속도와의 차이(Delta Spd) 크기가 –1.305km/h, -3.854km/h 으로 90%의 신뢰수준에서 다른 도로구간(Cluster 0, 2)과 유의한 차이(p<0.1)가 존재하였다. 이것은 구간 평균 통행속도를 측정하는 구간 속도 단속시스템과 유사하게 가변 제한속도 시점과 종점 지점에서 통행속도 변화로 인해 운전자들의 속도 편차가 발생하게 된다(Shim et al., 2015b).
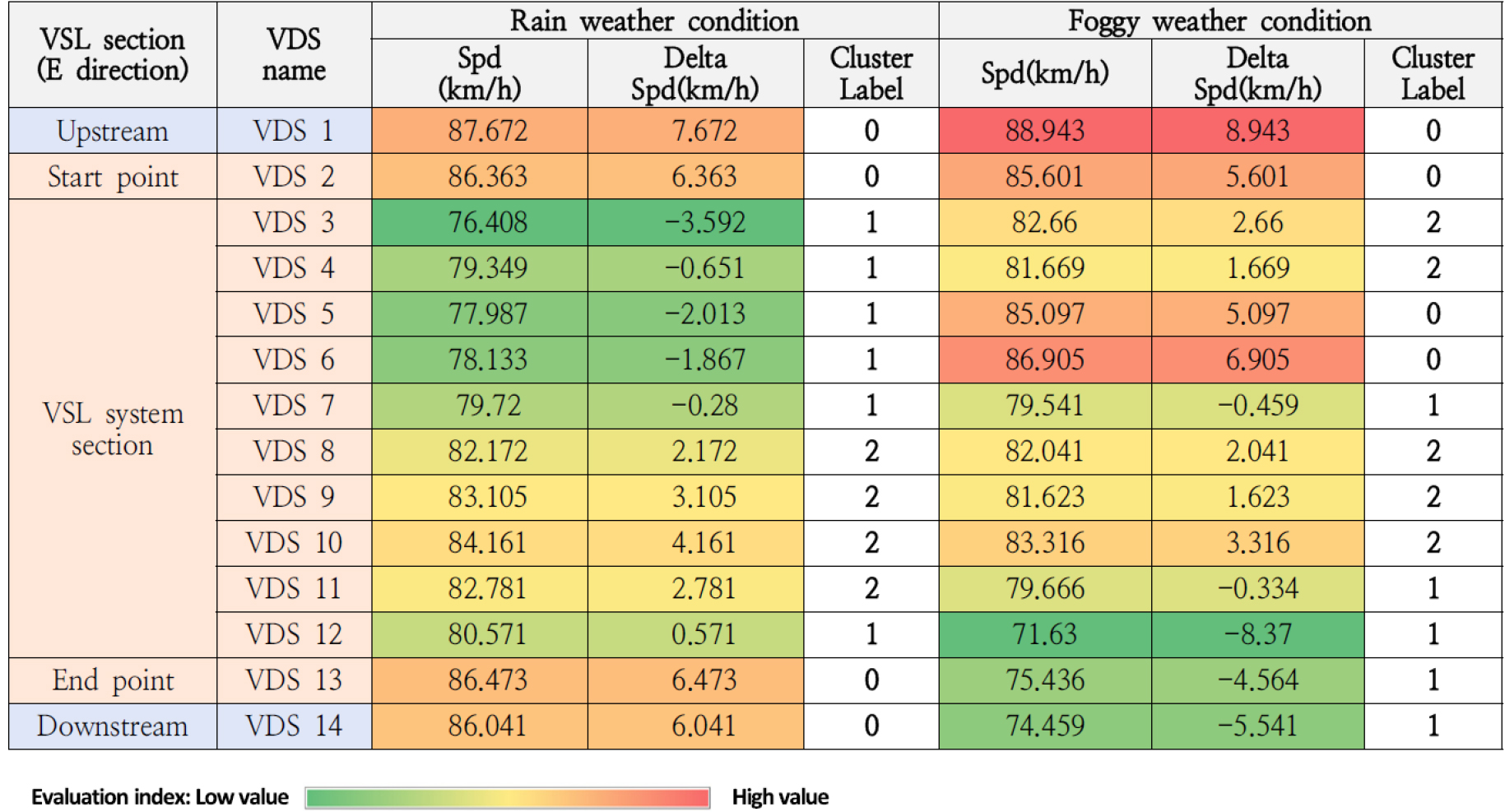
Table 3.
Clustering results for VSL system under adverse weather condition (E direction)
| Cluster label = 0 | Cluster label = 1 | Cluster label = 2 | ||||
| Weather |
Spd (km/h) |
Delta Spd (km/h) |
Spd (km/h) |
Delta Spd (km/h) |
Spd (km/h) |
Delta Spd (km/h) |
| Rain | 86.637*** | 6.637*** | 78.319** | -1.305** | 83.055* | 3.055* |
| Foggy | 86.604*** | 6.604** | 76.146* | -3.854* | 82.262** | 2.262** |
Figure 5와 Table 4는 S 방향 내 VSL 시스템 운영 시, 영향권 식별을 위한 군집분석 결과를 나타낸 것이다. S 방향의 강우 조건에서 VSL 시스템 운영 시, 도로구간 내 유사한 교통 특성(통행속도, 상/하류부 속도 차이)에 의해 3개의 구간으로 영향 구간이 식별되었고, 안개 조건의 경우는 4개의 도로구간으로 구분되었다. 식별된 영향권 구간별 교통 특성을 비교하였을 때, Cluster lable이 ‘0’인 구간은 높은 주행속도와 상/하류부의 속도 차이가 양의 부호를 갖는 구간으로, 상류부의 통행속도가 하류부의 통행속도보다 높음을 의미한다. 반면에, Cluster label이 ‘1’ 또는 ‘2’인 구간의 속도 차이는 음의 부호를 나타내는데, 이것은 VSL 시스템 운영 시 상류부 구간에 있는 차량의 자연스러운 감속을 유도함으로써 후미 추돌 위험을 감소시킬 수 있다(Wu et al., 2020). 구체적으로, 강우 시 Cluster label이 ‘1’인 도 로구간의 평균 상/하류부 속도 차이는 –3.857km/h로, 상류부 도로구간의 공간적 속도 차이(6.338km/h)보다 크기가 작았다. 이와 유사하게 안개 조건 시 Cluster label ‘1’, ‘2’의 통행속도 차이는 각 –2.651km/h, -6.508km/h로, 권장된 제한속도 미만의 통행속도임을 확인했다. Table 4에 표기된 Cluster 0,1,2,3은 공간적 분포는 Figure 5과 같고, VSL 시스템 진입 또는 상류부 구간의 평균 통행속도는 90km/h이상이고 공간적 속도 차이가 양(+)의 값을 가진다. 그러나, VSL 시스템 운영 구간(강우조건: Cluster 1, 안개조건: Cluster 1과 Cluster 2)에서는 하류부의 주행속도가 상류부에 비해 최대 6.588km/h 감속하는데 이것은 운전자들이 가변 제한속도에 민감하게 반응함이 관찰되었다.
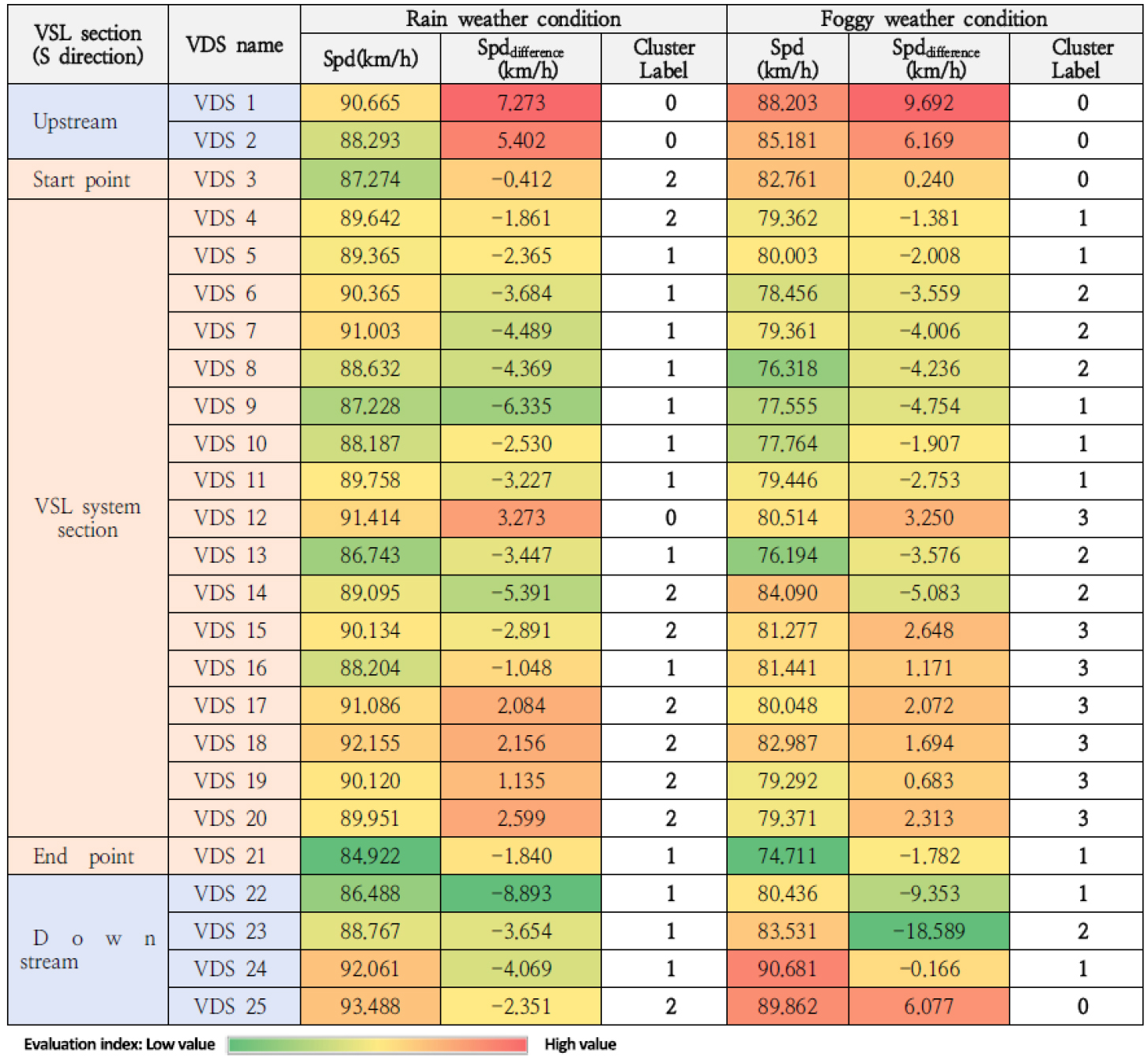
Table 4.
Clustering results for VSL system under adverse weather condition (S direction)
| Cluster label = 0 | Cluster label = 1 | Cluster label = 2 | Cluster label = 3 | |||||
| Weather |
Spd (km/h) |
Spddifference (km/h) |
Spd (km/h) |
Spddifference (km/h) |
Spd (km/h) |
Spddifference (km/h) |
Spd (km/h) |
Delta Spd (km/h) |
| Rain | 90.081* | 5.125* | 88.251* | -3.388 | 90.360 | 0.076 | - | - |
| Foggy | 84.710** | 7.312** | 79.857** | -2.651 | 79.658* | -6.508* | 80.704** | 1.975*** |
2. VSL 시스템 영향권 기준 VSL 시스템 운영 효과 평가
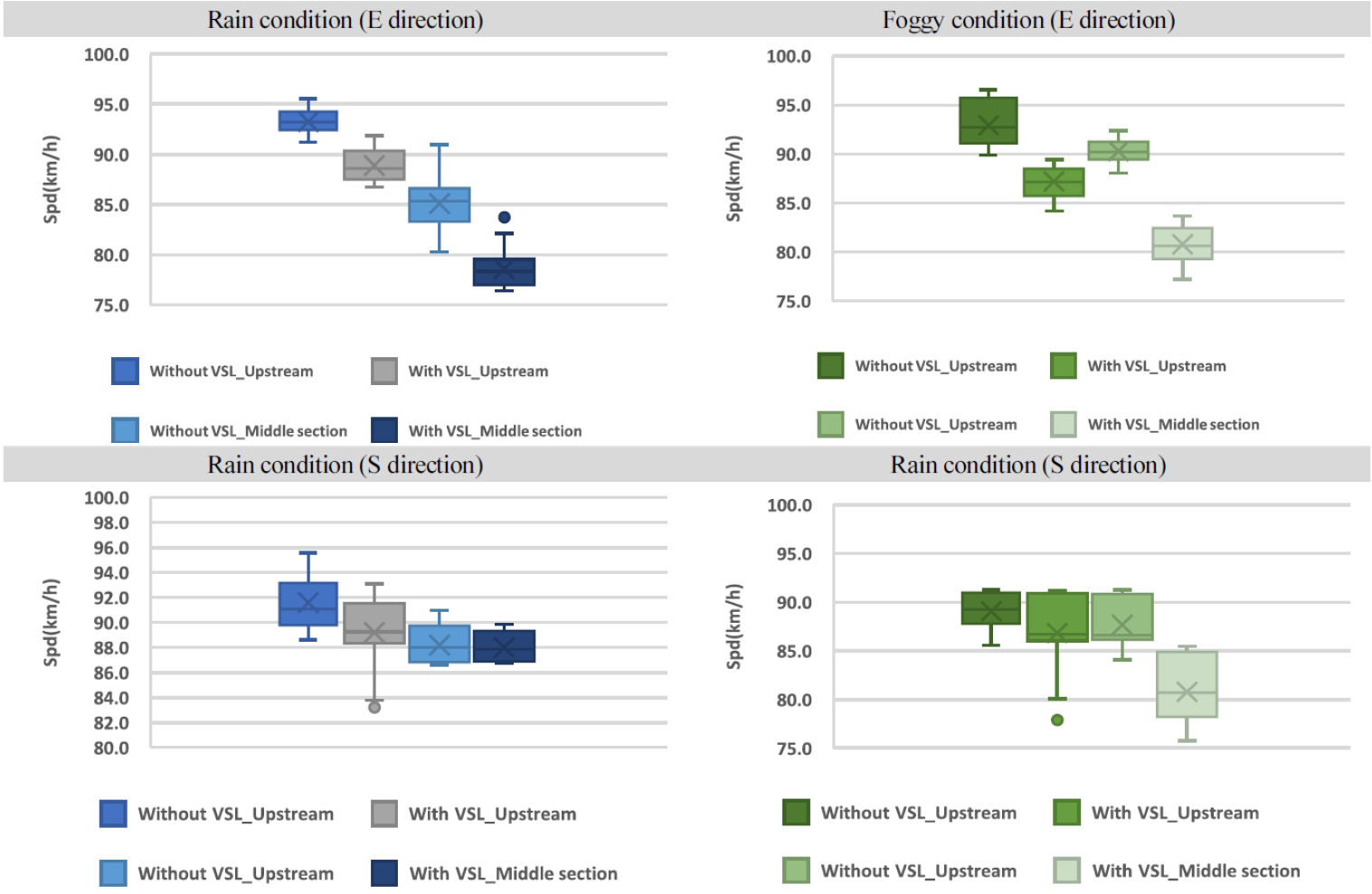
앞 절에서 방향별/ 기상 조건별 VSL 시스템 영향권 구간 식별 결과(Figure 4와 5) 바탕, 교통 표지 등화 전/ 후를 기준으로 구간별 교통흐름을 비교·분석하였다. VSL 시스템 운영 전 데이터는 기상 조건 요인에 의한 주행행태의 이질성을 최소화하기 위해 VSL 표지 등화 전, VSL 시스템 운영 시간 크기와 동일한 시간 크기의 교통류 데이터를 사용하였다. Figure 4와 5 중 Cluster label이 ‘0’과 ‘1’으로 구분되는 도로 구간별 교통 특성을 비교하였다. Cluster label ‘0’인 구간은 다른 도로구간에 비해 VSL 시스템 상류부 및 시점의 도로구간이고, Cluster label ‘1’은 VSL 시스템 운영 구간의 중간부를 의미한다. VSL 시스템 운영 후에 대해 상류부 도로구간, 중간부 도로구간의 교통지표(통행속도)간 통계적 차이가 존재하는지를 검증하기 위해 Anova 분석을 수행하였고, 분석 결과는 Table 5에 제시하였다. 분석 결과, VSL 교통 표지 등화 후 방향별/가상조건별 상류부와 중간부 도로구간의 통행속도는 95% 신뢰수준에서 통계적으로 유의한 차이가 존재하였다. Figure 6은 VSL 시스템 운영 전/후의 상류부, 중간부 도로구간의 교통지표를 비교한 결과를 의미한다. 상류부 도로구간(Cluster label이 ’0’ 인 도로구간, Upstream) 기준, VSL 시스템 운영 전에 비해 교통 표지 등화 후 평균 통행속도가 감소함을 확인하였다. 특히, E 방향의 안개 조건의 경우, VSL 시스템 운영은 도로구간의 주행속도 감소에 큰 영향을 끼친다고 할 수 있다. 상류부 도로구간과 유사하게, 중간부 도로구간(Cluster label이 ‘1’인 구간, Middle section)에서도 VSL 시스템 운영 시 제한속도 미만의 크기의 평균 속도로 분포함을 확인하였다. 상류부와 중간부의 주행속도 평균과 표준편차를 비교하였을 때, 상류부 도로구간에 비해 중간부 주행속도의 평균과 분산이 작았다. 이것은 VSL 시스템 시점으로 진입하는 차량은 개시된 제한속도 준수를 위해 더 큰 분산으로 속도를 줄이고, 점차 VSL 시스템 구간을 통과하면서 안정적으로 속도 감소함을 의미한다. 이와 유사하게, 구간 속도 단속 카메라 설치에 따른 도로 구간별 운전자의 주행행태를 비교하였을 때, 단속 카메라 설치 위치에 접근 시 제한속도 준수를 위해 일시적인 속도 감소 현상이 나타나고, 이에 따라 교통안전 성능을 평가할 필요성을 강조하였다(Shim et al., 2015a). 또한, 강우 조건도 E 방향의 안개 조건과 유사하게 VSL 시스템이 운영된 이후 전 도로구간에서 통행속도의 유의미한 감소가 관찰되었다. 특히 중간부 도로구간에서는 VSL 시스템 표지가 점등된 이후 속도 분산이 감소하였고 이것은 우천 시 추돌 사고의 개연성을 줄이는데 효과적일 수 있음을 시사한다(Pu et al., 2020). 반면, VSL 시스템 운영 시작 지점이 포함된 상류부 도로구간은 운전자들이 가변형 제한속도 표출 정보를 인지한 후 주행속도를 조정하기 시작하는 구간일 가능성이 있다. 이에 따라, 해당 구간은 형식적으로는 VSL이 미적용된 것으로 분류되었지만, 실제로는 운전자 행동 변화가 발생하여 VSL 운영의 간접적인 효과가 나타났을 가능성이 존재한다. 이러한 결과는 VSL 표출 위치와 시점이 운전자 속도 선택에 실질적인 영향을 미친다는 점을 시사하며, 추후 시스템 설계 시 해당 구간의 기능적 역할에 대한 재검토가 필요함을 의미한다(Yasanthi et al., 2022).
Table 5.
Anova analysis results of distance halo effect for VSL system by adverse weather and direction
연구 결론
본 연구는 기상 대응형 VSL 시스템의 속도 분포의 시공간적 변화를 기반으로 교통류 안정화와 운전자의 권장 속도 준수에 대한 효과를 평가하였다. 속도 관리 전략이 도로구간에 미치는 영향을 정량하기 위해 클러스터링 분석을 통해 VSL 시스템의 영향 도로구간을 세분화하였다. 세분화된 영향 구간을 바탕으로 VSL 시스템의 운영 전/후 교통 흐름을 비교함으로써 운영 효과를 포착하였다. 연구 결과, S 방향의 안개 조건을 제외한 다른 방향별/ 기상 조건별로 3개의 VSL 시스템의 영향 구간이 식별되었다. 식별된 구간 중 상류부 도로구간에 있는 영향 구간은 VSL 시스템 운영 시 높은 주행속도와 하류부 평균 속도에 비해 상류부의 주행속도가 높은 구간이라는 특성을 가진다. 반면에, 중간부에 위치하는 도로구간은 제한속도 미만의 크기의 평균 속도가 나타나고, 하류부 통행속도가 더 높은 것을 포착하였다. 이러한 점에서 VSL 시스템 운영은 상류부 구간에 있는 차량의 자연스러운 감속을 유도할 수 있을 것으로 기대한다. 또한, 횡단면 분석 기반 VSL 시스템의 운영 효과를 비교한 결과, VSL 시스템 운영은 악천후 조건에서 제한속도 이하의 주행속도를 유지하고 차량 간 속도 차이가 감소를 유도하는 교통안전 관리 도구로서의 활용성을 확인하였다. 잠재적으로 운전자의 제한속도 준수율 향상을 위해서는 속도 단속 법규 집행뿐만 아니라 가변속도 표출기와 같이 운전자의 속도를 교정할 수 있는 관리 방안을 같이 적용함으로써 제한속도 준수에 관한 공간적 효과 증대를 기대할 수 있다(Karimpour et al., 2021). 그리고, VSL 시스템이 적용된 구간에서의 속도 저감 및 편차 감소 효과는 안전성 확보에 긍정적으로 작용하며, 이는 선행 연구에서 제시된 바와 같이 기상 악화 시 속도 편차가 커질수록 사고 위험이 증가한다는 점과도 일치한다(Pu et al., 2020; Yasanthi et al., 2022). 또한, 상류부 도로구간에서 VSL 시스템 운영 구간에 접근하는 차량의 일시적인 속도 감소로 속도 분산이 증가함이 관찰되었다. 이를 통해 상류부 도로구간의 사고 위험이 증가할 수 있으므로, 향후 속도 관리 전략 수립 시 단속 구간 상류부에 대한 세부적인 안전 성능을 고려할 필요가 있다(Shim et al., 2015b; Lee et al., 2002). 그리고 실제 운영 시에도 VSL 시스템의 설치 위치와 시점이 운전자 행동에 미치는 영향을 충분히 고려해야 하고, VSL 시스템 적용 구간의 설계 및 관리 전략 수립에 중요한 시사점을 제공한다. 본 연구에서는 데이터수집 환경조건으로 인해 교통류 단위의 비교 분석을 수행하였지만, 향후 개별차량 궤적(내비게이션, CCTV 영상 등)을 추가로 활용함으로써 개별차량의 실제 주행행태에 VSL 시스템이 미치는 영향을 효과적으로 추정할 수 있을 것으로 기대한다. 또한, 신뢰도 이론(Reliability Theory)을 기반으로 도로-기상 조건에 따라 운전자의 속도 선택 행동을 분석하고 이를 통해 제공되는 가변형 제한속도 정보의 신뢰성을 체계적으로 평가할 필요가 있다. 아울러 충분한 교통사고 데이터를 활용하여, 미국 도로안전편람(Highway Safety Manual)에서 제시하는 교통안전 시설물의 효과 분석 방법론에 기반한 평가를 수행함으로써, VSL 시스템 운영이 교통 안전성 향상에 기여하는 정량적인 영향력을 확인할 수 있을 것으로 기대한다.
