

서론
100 Delivery Scooters Naturalistic Riding Study in Korea
1. 데이터 수집
2. 데이터 가공
방법론
1. 연구흐름도
2. 서포트 벡터 머신
분석결과
1. 서포트 벡터 머신 모형 성능평가 결과
2. 모니터링 활용방안
결론
서론
사회적 거리두기로 인해 비대면으로 음식 주문이 가능한 배달 서비스 관련 모바일 앱이 활성화되었다. 배달 서비스 플랫폼이 급성장함에 따라 배달 가능한 음식의 종류가 다양해졌으며, 배달 서비스에 대한 수요 또한 증가하였다. 한국의 통계청에 따르면 2021년 12월 기준 온라인 쇼핑 거래액이 약 192조원으로 최대치를 기록하였으며, 이는 2020년 12월의 기록인 159조보다 약 21.0% 증가한 수치이다. 특히 배달 음식을 주문하는 음식서비스 거래액이 약 25조로 전년 대비 48.2%가 증가하였다(KOSIS, 온라인 쇼핑 동향). 배달 플랫폼은 소비자가 주문을 하면 플랫폼 사업자가 제휴 사업자에게 주문을 전달하고, 제휴 사업자가 주문에 따른 음식을 배송하는 형태로 구성되어있다. 이륜차는 배달목적지까지의 접근성이 높기때문에 경량의 물품을 빠른 시간 내에 목적지까지 배달할 수 있으며, 유지 및 운영 측면에서 경제적이기 때문에 대부분의 음식 배달서비스 라이더들은 업무 수행에 이륜차를 활용하고 있다(Ham et al., 2018). 따라서 이륜차 사고도 2016년부터 2018년까지는 18,982건에서 17,611건으로 감소하는 추세였으나 2019년 기준 20,989건으로 전년 대비 18.7% 증가하였으며 2020년에도 1.7% 증가한 21,258건을 기록하였다(TAAS, 교통사고 분석 시스템). Lim et al.(2021)은 음식 배달 건수와 이륜차 교통사고 건수의 높은 상관관계를 분석하였다. 음식 배달서비스의 품질과 라이더들의 수익은 주문 할당으로 인한 배송 시간의 제약에 크게 영향을 받는다. 제한된 배송 시간은 라이더의 무리한 운전으로 이어지기 때문에 배달 이륜차의 위험운전행동 및 교통사고 발생 가능성이 높아진다. 이륜차는 차체의 구조 특성상 주행안전성 확보가 어렵고 라이더의 신체가 외부로 노출되기 때문에 사고발생 시 사고심각도가 높아질 가능성이 크다(Jeju Research Institute, 2020). 2018년부터 2020년까지 배달 이륜차 라이더 중 사고재해자는 2,180명에서 3,268명으로, 사고사망자는 23명에서 29명으로 지속적으로 증가하였다(Korea Occupational Safety and Health Agency, 2021).
음식 배달 서비스 산업이 지속적으로 성장하는 추세이므로 정부에서는 이륜차의 교통안전을 확보하기 위하여 불법 행위 단속 및 라이더 대상 안전교육을 강화하고 있다. 그러나 배달 이륜차 교통사고를 효과적으로 예방하기 위해서는 체계적인 교통안전관리 시스템의 마련이 시급한 상황이다. 효과적인 배달 이륜차의 교통안전관리를 위해서는 기존의 교통안전관리 대상에 포함되어 있는 택시, 버스, 화물차와는 다른 특성을 지닌 배달 이륜차의 실제 주행 자료를 활용하여 위험이벤트를 검지할 필요가 있다. 따라서 본 연구의 목적은 음식 배달 이륜차 라이더가 근무 중에 주행한 실제 자료를 수집하여 라이더 주행 특성 기반의 위험 이벤트 검지 기법을 개발하고 활용방안을 제시하는 것이다. 배달 이륜차의 위험 이벤트 검지 기법은 배달업에 종사하는 라이더를 대상으로 하는 교통안전 모니터링 시스템을 구축하는 데 효과적으로 활용될 수 있다.
기존에 이륜차의 주행특성에 대한 심층적인 이해를 위해서 이륜차의 일상적인 통행에서 주행 데이터를 수집하여 Naturalistic riding study(NRS)를 활용한 프로젝트가 수행된 바 있다(VTTI, 2011; European commission, 2009). Virginia Tech Transportation Institute(VTTI)는 Motorcycle Safety Foundation(MSF)와 함께 100명의 라이더가 개인 이륜차로 29개월간 주행한 데이터를 수집하여 이륜차의 주행특성을 분석하였다. 유럽에서 수행된 2-Wheeler Behavior and Safety(2BESAFE) 프로젝트에서는 5명의 라이더와 6대의 이륜차를 대상으로 데이터를 수집하여 라이더와 다른 도로 이용자의 주행 특성을 분석하였다. NRS는 실제 데이터를 활용하므로 위험한 상황과 위험하지 않은 상황 모두에서 라이더의 주행특성을 정량화할 수 있다. 따라서 교통사고 조사를 통해 검지할 수 없는 요인을 식별할 수 있으며, 위험한 상황이 발생할 경우 해당 라이더의 일반적인 주행상황과 비교 분석할 수 있다. 또한 추후 시스템 개발 및 테스트에 실제 수집 데이터를 활용할 수 있다는 특징이 있다(VTTI, 2015). NRS를 통해 수집된 데이터를 활용하여 이륜차 라이더의 위험상황을 검지하고 주행패턴을 식별하기 위한 연구가 다수 수행되었다. Attal et al.(2018)은 5명의 라이더를 대상으로 수집한 데이터를 활용하여 라이더의 주행상황을 normal riding, near fall, fall 3개의 구간으로 분류하였다. Vlahogianni et al.(2011)은 한 명의 라이더가 3달동안 20분씩 주행한 데이터를 수집하여 라이더의 규칙적인 주행행태와 비규칙적인 주행행태 분류에 영향을 미치는 요인을 분석하였다. Vlahogianni et al.(2013)은 3명의 라이더와 1대의 이륜차를 대상으로 수집한 데이터를 분석하여 위험상황을 검지하기 위한 방법론을 제시하였다. Manan et al.(2017)은 비디오 및 레이더 장비를 활용하여 수집한 8277명 라이더의 주행 자료를 활용하여 이륜차의 과속주행에 큰 영향을 미치는 주행특성을 분석하였다. Will et al.(2020)은 12명의 라이더를 대상으로 4대의 이륜차를 활용하여 종방향 가속도와 횡방향 가속도의 조합으로 구성한 g-g다이어그램을 분석하고 세 가지 유형의 주행 프로필을 구분했다. 이륜차의 주행특성을 분석하기 위한 대부분의 연구는 가속도계, 자이로스코프, GPS 센서와 같은 다양한 장치를 통해서 수집되는 데이터를 활용하여 이륜차의 위험상황을 규명하기 위한 분석을 수행하였다(Cossalter et al., 2005; Boubezoul et al., 2013; Cossalter et al., 2013; Attal et al., 2015; Attal et al., 2018; Gelmini et al., 2020; Iqbal et al., 2021).
라이더의 실제 주행데이터를 활용한 대부분의 연구는 일반 라이더의 주행패턴에서 crash, near miss, normal driving 패턴을 분류하기 위한 분석을 수행하였다. 그러나 일반 라이더와 다르게 음식 배달업에 종사하는 라이더는 제한된 시간 안에 배달을 완료하는 것이 통행의 주된 목적이기 때문에 위험한 주행 이벤트의 발생 가능성이 증가한다. 따라서 본 연구에서는 통행 목적이 음식 배달인 이륜차를 분석 대상으로 선정하여 주행 특성을 분석하였다. 서포트 벡터 머신 기반 분류기는 안면인식, 문자인식, 감정분석, 네트워크 보안 시스템 등 다양한 분야에서 활용되고 있으며 높은 정확도의 결과를 도출하였다(Abdullah et al., 2021). 서포트 벡터 머신은 일반화 오류를 최소화할 수 있으며 과적합이 되는 경우가 적고 모형 구축이 비교적 용이하다는 장점이 있다(Mathur et al., 2008; Chandra et al., 2021; Balasubramaniam et al., 2021). 따라서 라이더가 근무 중일 때에 수집한 실제 주행자료를 서포트 벡터 머신 기법에 활용하여 음식 배달 이륜차만의 주행특성이 반영된 위험이벤트 검지 기법을 개발하였다.
본 논문의 구성은 다음과 같다. 2장은 100명의 라이더들을 대상으로 수행한 Naturalistic Riding Study에 대해 서술하였다. 3장은 서포트 벡터 머신 기법을 기반으로 배달 이륜차의 위험 이벤트 검지 기법을 개발하기 위한 분석방법론을 제시하였다. 4장은 서포트 벡터 머신 기법을 활용하여 위험 이벤트와 일반 이벤트를 분류하는 모델을 구축한 결과를 제시하고 본 연구에서 개발한 위험 이벤트 검지 기법의 활용방안을 제시하였다. 마지막으로 5장은 본 연구의 결론과 향후 연구과제를 서술하였다.
100 Delivery Scooters Naturalistic Riding Study in Korea
1. 데이터 수집
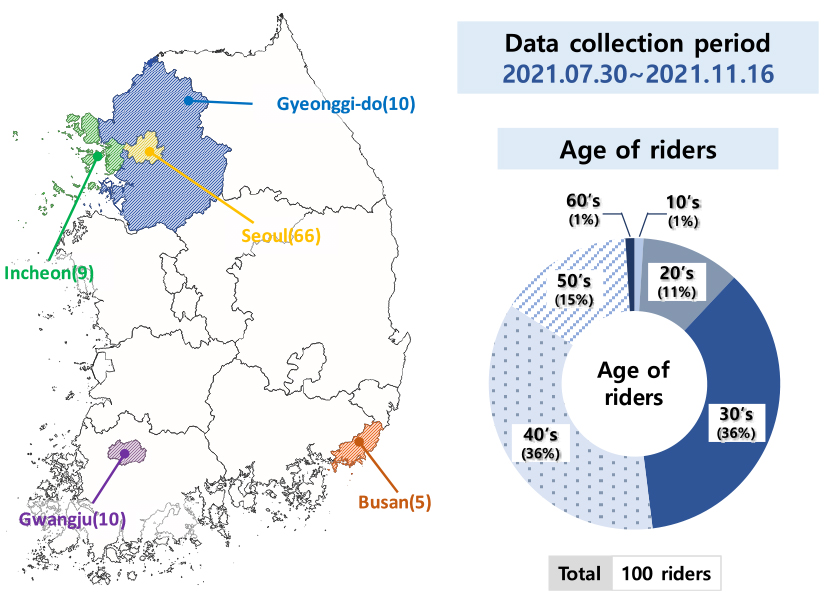
본 연구에서는 2021년에 100명의 라이더들을 대상으로 수행된 Korean 100 nturalistic riding study(K-100 NRS) 프로젝트에서 수집한 데이터를 활용하였다. K-100NRS에서는 대한민국 서울시, 경기도, 인천시, 광주시, 부산시에서 음식 배달 업무에 종사하고 있는 100명의 라이더를 대상으로 2021년 7월 30일부터 11월 16일까지 주행 데이터를 수집하였다. 지역별로 라이더 수는 서울특별시 66명, 경기도 10명, 인천광역시 9명, 부산광역시 5명, 광주광역시 10명이다. 라이더의 성별은 모두 남성으로, 연령은 19세부터 61세까지 분포되어 있으며 평균 연령은 40세이다. Figure 1에 데이터 수집 범위를 제시하였다.
주행 데이터는 GPS 센서와 6축 센서가 내장된 SeDA-Gateway(SkyAutoNet)를 통해 수집되었다. SeDA-Gateway의 CPU는 STM32F20를 사용하며 운영 체제는 Linux이다. 센서를 구동하기 위한 전압은 12V-24V이며 최대 30V이다. 센서는 주변 온도 –40℃-+85℃에서 정상 작동한다. 장치에 용량 1080mAh의 배터리가 내장되어 있으며 이륜차 시동이 켜진 경우 차량 배터리로 작동하고 이륜차의 시동이 꺼진 상태에서는 작동이 정지한다. SeDA-Gateway의 기술 스펙을 Table 1에 제시하였다.
Table 1.
SeDA-Gateway technical specifications
| Item | Description |
| CPU | STM32F20 |
| OS | Linux |
| MODEM | Qualcomm LTE Cat.4 |
| Operation Voltage | 12V-24V (Max. 30V) |
| Storage Temperature | -40℃-+85℃ |
| Internal Battery | 1080mAh |
데이터 수집 장치는 방수가 되지 않기 때문에 외부 노출이 되지 않는 위치에 설치되어야 한다. 실증을 위해 참여한 라이더 대부분은 이륜차의 안장 아래에 장치를 설치하였고 일부 안장 아래 설치가 어려운 경우에는 배달통에 장치를 설치하였다. 라이더들이 운행한 이륜차는 HONDA에서 제작된 PCX기종으로 차체의 길이, 폭, 높이가 192.5, 74.5, 110.5cm, 중량이 130kg이고 배기량은 125cc이다. Figure 2에 데이터 수집 장치의 설치 위치를 제시하였다.
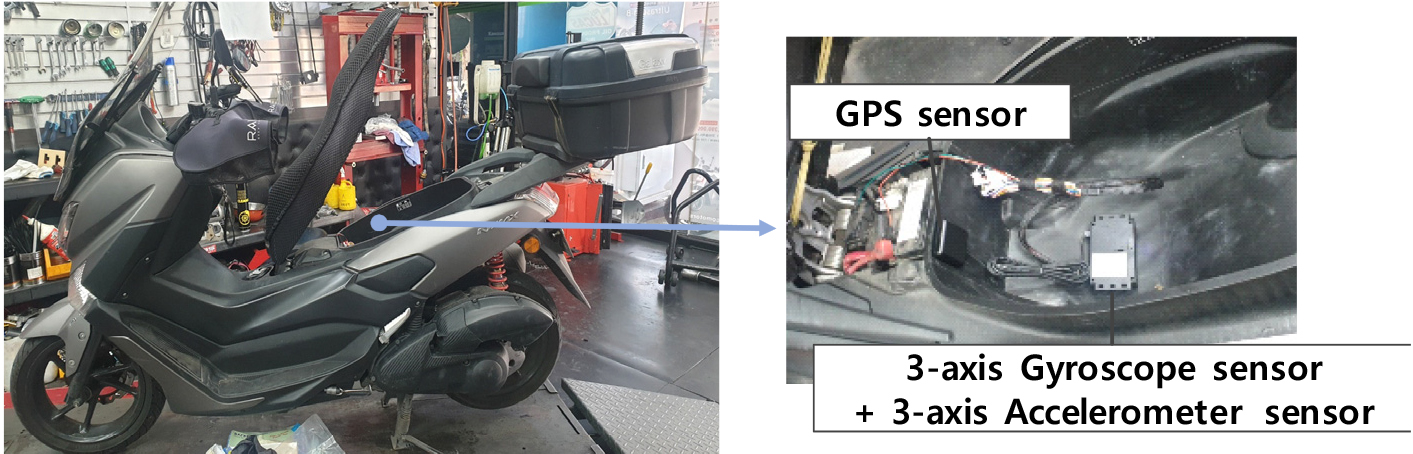
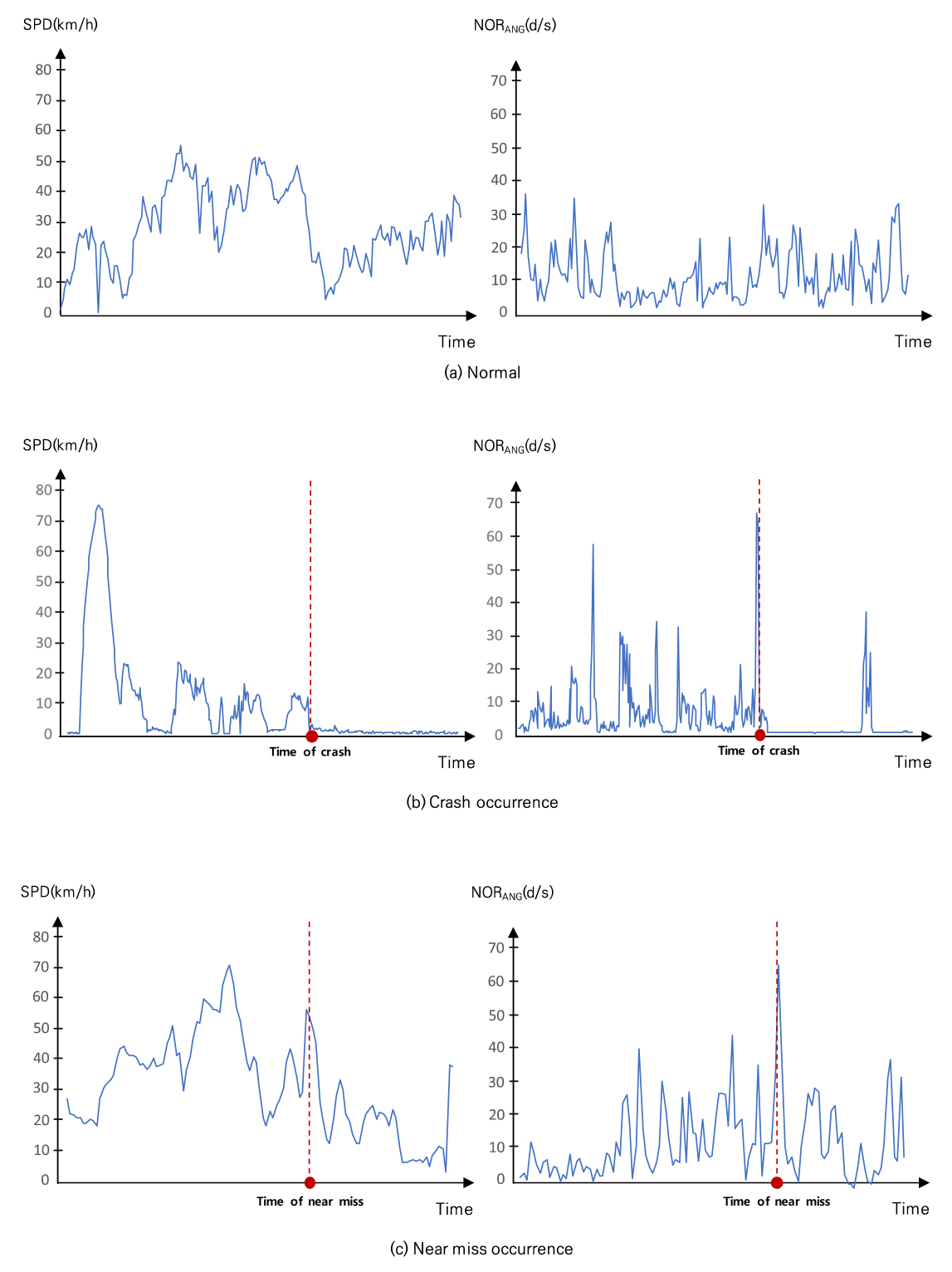
GPS 센서는 장치ID, 경도, 위도, 속도, 방위각 정보를 수집한다. IMU 6축 센서는 3축 Gyroscope 센서와 가속도 센서로 구성되어 있으며 Gyroscope 센서는 3축의 움직임을 감지하고 각 축(X, Y, Z축)의 각속도를 측정하며 가속도 센서는 각 축(X, Y, Z)의 가속도를 측정한다. 3축 가속도 및 각속도 자료는 장애물 및 구배, 노면상태 등 도로환경 요소별 평균 및 표준편차 등의 차이가 나타나므로 이륜차의 주행특석 분석을 위해 활용 가능한 변수이다. K-100NRS에서는 라이더의 crash, near miss, normal 중 crash와 near miss를 위험이벤트로 정의하고 normal을 일반 이벤트로 정의하였다. 센서를 통해 수집되는 자료 중 가속도, 각속도 norm, X축 각속도를 활용하여 위험 이벤트 여부를 라벨링하였다. 이륜차의 위험 이벤트가 발생한 경우 1로, 위험 이벤트가 아닌 일반 이벤트인 경우 0으로 수집된다(Korea Occupational Safety and Health Agency, 2021). 100대의 이륜차를 대상으로 장치의 일련번호, 위도, 경도, 3축 가속도, 3축 각속도 및 위험 이벤트 여부가 1초 단위로 수집된다. 수집된 데이터는 LTE 통신을 통해 저장 서버로 전송되어 데이터 베이스가 구축되었다. 본 연구에서는 K-100NRS에서 구축된 데이터 베이스를 활용하였다. Table 2에 수집 데이터 항목을 제시하였다.
Table 2.
Collected data
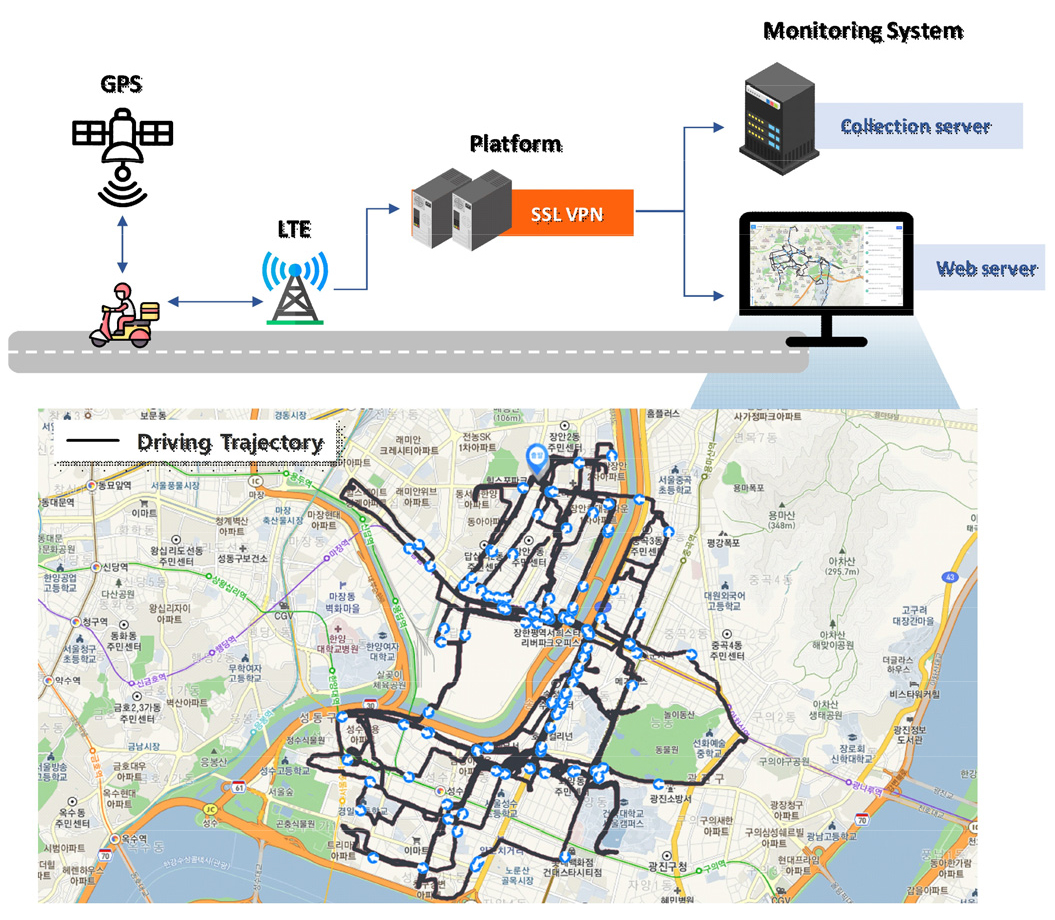
K-100NRS에서는 라이더의 주행 정보를 실시간으로 확인할 수 있는 모니터링 시스템을 구축하였다. 모니터링 시스템은 2분 단위로 이륜차 시동 on/off 여부, 속도, 위치 등의 정보와 주행 궤적이 업데이트된다. 주행 데이터는 LTE통신을 통해 플랫폼을 거쳐 저장 서버에 저장되고 Web server를 통해 주행 정보가 표출된다. 모니터링 시스템에서는 이륜차의 실시간 주행 정보와 주행 이력 정보를 확인할 수 있다. 데이터 수집 및 모니터링 시스템 표출 과정의 개념도를 Figure 3에 제시하였다. 라이더의 위험이벤트로 정의한 crash와 near miss의 자료를 수집하기 위해 라이더가 실제로 주행 중에 경험한 위험상황에 대한 설문조사를 수행하였다. 라이더는 실시간 주행 데이터 수집 기간 동안 crash 및 near miss 발생 이력에 대하여 온라인으로 설문조사 문항에 응답하였다. 라이더의 인적사항, 장치번호, 사고지역, 사고날짜, 사고일시, 상세 사고상황, crash 또는 near miss 여부가 설문조사 항목으로 포함되었다. 라이더의 응답에 따라 crach 및 near miss가 발생한 경우 위험이벤트로 라벨링 되었으며, 이외에는 일반이벤트로 라벨링되어 데이터가 수집되었다.
2. 데이터 가공
본 연구에서는 K-100NRS를 통해 구축된 모니터링 시스템이 안정화된 후인 8월 20일에 데이터가 수집된 라이더들 중에서 랜덤으로 선정한 30명의 데이터를 분석에 활용하였다. 분석 데이터 및 분석 결과의 신뢰성과 정확성을 확보하기 위해서 원시 데이터의 이상치 제거 과정을 수행하였다. GPS센서를 통해서 수집한 장치번호, 시간, 위도, 경도를 활용하여 이동거리, 속도와 가속도를 산출하였다. 속도는 t-1시점에서 t시점까지 이동한 거리를 1초 단위로 나누어 산출하였다. 속도의 산출식을 Equation 1에 제시하였다. 가속도는 t-1시점의 속도에서 t시점 속도로의 변화량을 1초 단위로 나누어 산출하였다. 가속도의 산출식을 Equation 2에 제시하였다.
여기서, : t-1에서 t까지 이동거리
여기서, : 시간 t-1의 속도
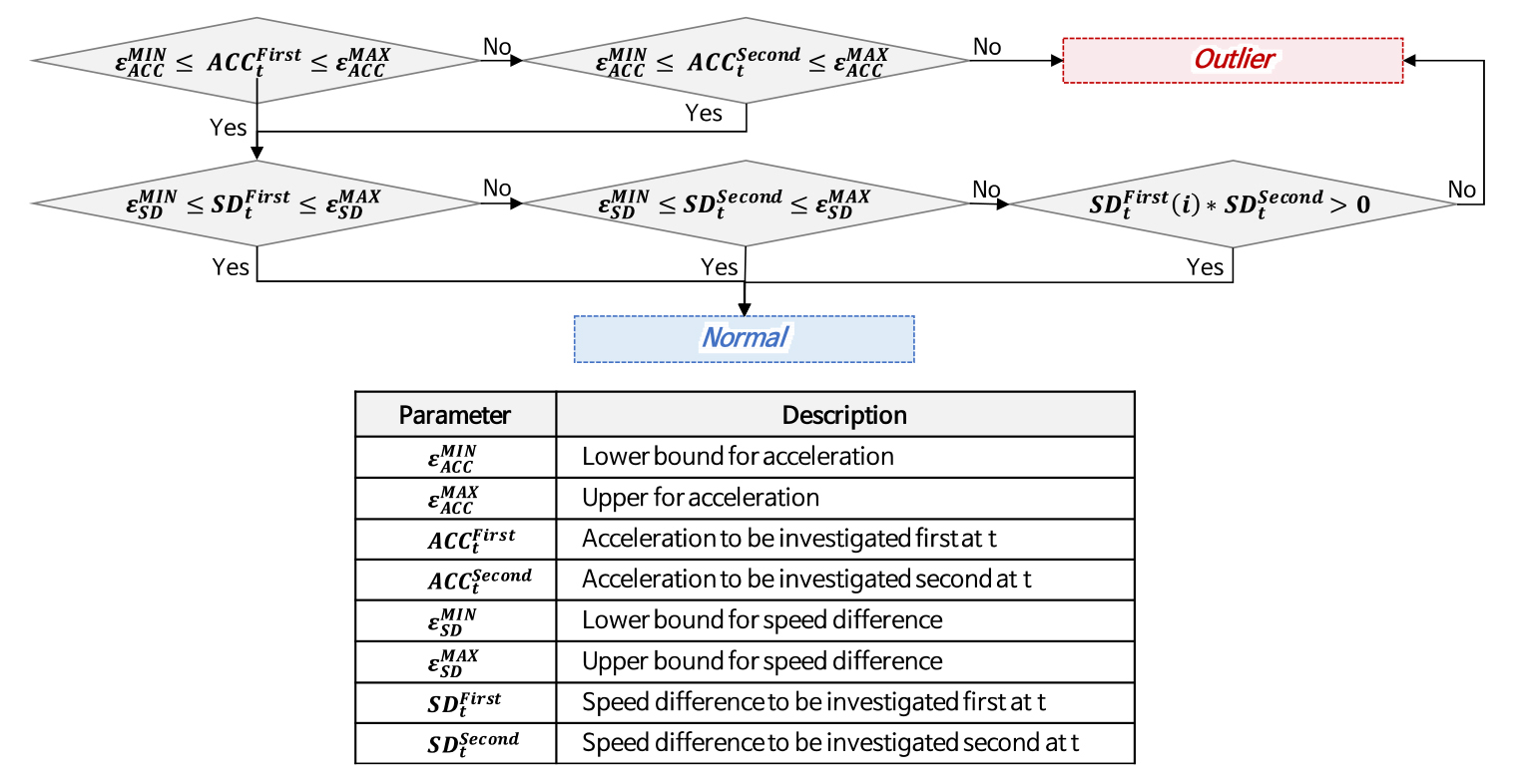
이륜차의 물리적인 최대 가감속 범위를 고려하여 실제 주행자료의 이상치를 검지하였다. 이상치 검지 알고리즘은 가속도를 검증하고 속도의 변화량을 검지하는 두 개의 단계로 이루어진다. 첫 번째 단계에서는 이륜차가 물리적으로 주행할 수 있는 최대 가감속도의 범위를 임계값으로 설정하고 임계값을 벗어나는 데이터를 이상치로 검지하였다. 제동장치의 제동능력을 기준으로 이륜차의 최대 감속도는 5.1m/s2이다(자동차 규칙 제2절). 제로백은 차량이 정지 상태에서 100km/h에 이르는 시간으로 환산하여 도출된 가속도 1.6m/s2을 최대 가속도로 적용하였다. 두 번째 단계에서는 속도 변화량이 임계값 이상이고 속도 변화량의 곱이 음수인 데이터를 이상치로 검지하였다. 첫 번째 단계에서 산출한 최대 감속도와 최대 가속도를 활용하여 속도 변화량의 임계값을 산출하였다. 이륜차가 1.6m/s2으로 가속할 경우 속도 변화량의 최대값은 5.76km/h이며, 5.1m/s2으로 감속할 경우 속도 변화량의 최대값은 18.36km/h 이다. 이륜차 주행 데이터의 이상치 검지 알고리즘을 Figure 4에 제시하였다.
IMU 센서를 통해 수집되는 데이터 중 가속도 및 각속도는 X, Y, Z축 3개의 방향별로 측정되므로 각 축별로 이륜차의 움직임을 분석하는 데 활용된다. 그러나 본 연구에서는 모든 방향에 대해서 균일하게 고려할 수 있는 변수를 활용하기 위해서 가속도와 각속도의 norm을 산출하였다. 공간벡터의 길이를 나타내는 norm은 회전에 관계없이 하나의 대푯값으로 분석에 활용될 수 있다. 가속도의 norm 또는 각속도 norm이 커질수록 이륜차 차체의 움직임이 커지는 것으로 해석한다. Gyroscope 센서를 통하여 수집한 X축, Y축, Z축의 각속도를 활용하여 각속도의 norm을 산출하였다. 각속도 norm의 산출식을 Equation 3에 제시하였다. 가속도 센서를 통하여 수집한 X축, Y축, Z축의 가속도를 활용하여 가속도의 norm을 산출하였다.
여기서, : X축 가속도
: Y축 가속도
: Z축 가속도
여기서, : X축 각속도
: Y축 각속도
: Z축 각속도
30명의 라이더를 대상으로 수집한 주행 데이터에서 이상치를 제외하고 가속도 norm과 각속도 norm을 산출하여 데이터셋을 구축하였다. 라이더별 1초단위의 속도, 가속도, X축 가속도, Y축 가속도, Z축 가속도, X축 각속도, Y축 각속도, Z축 각속도, 가속도의 norm, 각속도의 norm으로 총 10개의 변수를 서포트 벡터 머신 분석을 위한 input 변수로 활용하였다. 분석에 활용할 변수에 대한 기초통계분석을 수행하였다. 기초통계분석 결과는 Table 3에 제시하였다.
Table 3.
Descriptive statistics
방법론
1. 연구흐름도
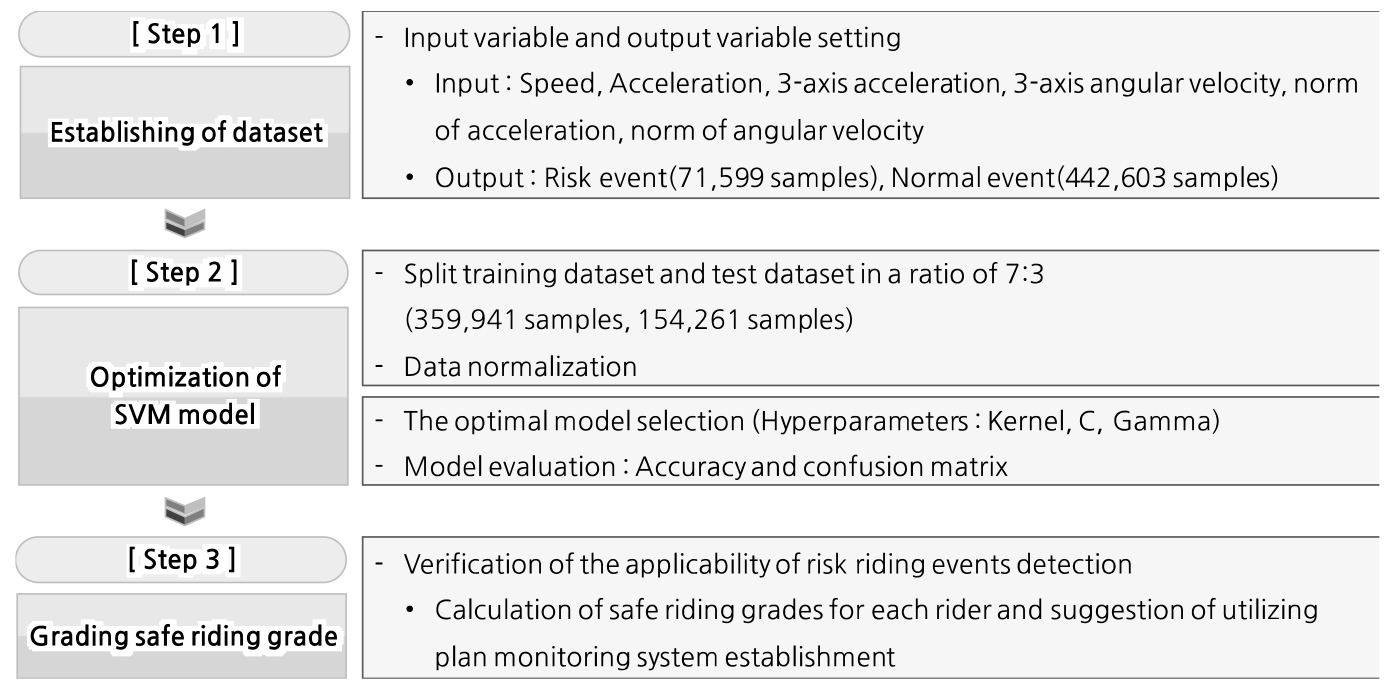
본 연구에서는 배달 이륜차 라이더 30명이 하루동안 근무한 주행 자료를 수집하여 분석에 활용하였다. 본 연구는 3개의 단계로 구성되어 있다. 단계 1에서는 분석에 활용하기 위한 데이터셋을 구축하였다. 1초 단위로 수집되는 속도, 가속도, 3축 각속도, 3축 가속도, 각속도의 norm, 가속도의 norm을 input변수로 설정하고 위험 이벤트 여부를 output변수로 설정하였다. 전체 514,202건의 데이터 중에서 71,599건의 위험 이벤트와 442,603건의 일반 이벤트 데이터를 분석에 활용하였다. 전체 데이터 중 약 13.9%가 위험 이벤트, 약 86.1%가 일반 이벤트로 구성되었다. 단계 2에서는 서포트 벡터 머신 모델 구축을 위해서 train set과 test set을 7:3 비율로 분리하여 514,202건의 데이터가 359,941건과 154,261건으로 분리되었다. 분리한 데이터셋을 분석에 활용하기 전 모든 데이터가 동일한 정도의 스케일로 반영될수 있도록 데이터 정규화 과정을 수행하였다. 다음으로 train set을 활용하여 서포트 벡터 머신 모형을 구축하였다. 하이퍼 파라미터 튜닝 과정을 수행하여 모형을 최적화하였다. 파라미터는 kernel, C, gamma를 활용하였다. kernel은 커널 함수의 종류를 지정하는 파라미터이며, C는 허용하는 오류의 정도, gamma는 커널의 계수를 지정하는 파라미터이다. 최적화된 모형을 활용하여 test set의 분류정확도와 confusion matrix를 도출하였다. 마지막으로 3번째 단계에서는 본 연구에서 개발한 위험 이벤트 검지 기법의 활용가능성을 검증하기 위해서 라이더별 안전운전 등급을 산정하고 안전운전 등급별로 라이더가 주행 중 응답한 사고 및 아차사고 발생 데이터와 매칭하였다. 전체적인 연구흐름도를 Figure 5에 제시하였다.
2. 서포트 벡터 머신
본 연구에서는 배달 이륜차의 주행자료를 위험 이벤트와 일반 이벤트로 분류하는 모형을 구축하기 위해서 서포트 벡터 머신(Support vector machine, SVM)기법을 활용하였다. 서포트 벡터 머신은 Vapnik이 제안한 머신러닝 기법으로, 경험적 위험 최소화 원칙을 기반으로 하는 다른 통상적인 머신러닝 기법과는 달리 구조적 위험 최소화를 기반으로 하여 일반화 오류의 상한을 최소화할 수 있는 머신러닝 기법이다. 서포트 벡터 머신은 동일한 클래스에 속한 데이터 포인트들이 모여있는 지역에 경계를 설정하는 분류기법으로 train set의 데이터에 대해 마진을 최대로 하는 경계를 찾는 알고리즘이다. 서포트 벡터 머신은 퍼셉트론 기반의 모형에 가장 안정적인 판별 경계선을 찾기 위한 제한 조건을 추가한 모형경계로 나누어진 두 개의 클래스 중 새로운 데이터가 어느 클래스에 속할지 판단하는 분류 모델이다. 선형 분리를 수행할 경우, 각 클래스에 오분류된 데이터 포인트들에 벌점을 부과한 후 총 벌점이 최소가되는 초평면을 선택한다. 훈련에 사용되는 학습 데이터가 이고, 목적변수가 인 N개의 샘플의 결정경계는 Equation 5와 같이 표현된다(Cortes et al., 1995).
여기서, 는 결정 초평면의 가중치를 나타내는 법선벡터이며 는 매개변수(bias)이다. 초평면 는 전체 특징 공간을 와 두 영역으로 분리한다. 임의의 점 x에서 초평면까지의 거리는 Equation 6과 같다(Cortes et al., 1995).
두 클래스의 지지벡터의 여백인 을 최대화하는 조건부 최적화 문제는 Equation 7과 같은 최소화 문제로 나타낼 수 있다(Cortes et al., 1995).
서포트 벡터 머신은 선형뿐만 아니라 비선형 분류에도 활용된다. 비선형 분리를 위해서는 주어진 데이터를 고차원 특징 공간으로 이동하는 커널 트릭을 활용한다. 대표적으로 비선형 공간을 선형으로 변환하는 3가지의 커널함수는 다항식 커널, radial basis function 커널, 하이퍼볼릭 탄젠트 커널이다. 각 커널의 함수식을 Equation 8에 제시하였다(Vapnik, 1999).
SVM은 커널함수에 따라 서로 다른 초평면을 결정하게 되며, 데이터의 경계를 조절하는 파라미터에 따라 모델의 성능이 달라진다. 본 연구에서는 서포트 벡터 머신의 하이퍼 파라미터로써 function, C, gamma를 활용하였다. function은 서포트 벡터 머신의 함수로 RBF, linear, polynomial, gaussian이 있다. C는 과적합을 막기 위한 정도를 지칭하는 하이퍼 파라미터로 적절한 C를 구하기 위해 tune 함수를 사용하여 조정하게 된다. Gamma는 커널 함수가 비선형인 경우 유용하며, 커널계수를 지정하는 하이퍼 파라미터이다.
분석결과
1. 서포트 벡터 머신 모형 성능평가 결과
본 연구에서는 음식 배달 이륜차의 normal event와 unsafe event를 분류하는 SVM 모형의 개발을 위해 파이썬의 scikit-learn 패키지를 활용하였다. 패키지에서 제공하는 함수를 활용하여 데이터셋 분리, 정규화, SVM 모델 생성 및 하이퍼 파라미터 최적화 과정을 수행하였다. 분석에 활용한 데이터 중 normal event 442,603건(86.1%), unsafe event 71,599건(13.9%)에 대한 총 514,202건의 데이터를 분석에 활용하였다. 트레이닝 셋과 테스트 셋은 7:3의 비율로 설정하여 랜덤으로 분리하였다. 서포트 벡터 머신 모형의 과적합을 방지하고 분류정확도를 높이기 위해서 하이퍼 파라미터 튜닝 과정을 수행하였다. 모형을 최적화하기 위하여 활용한 하이퍼 파라미터별 정의와 최적화 결과를 Table 4에 제시하였다. 최종 모형의 커널 함수는 RBF, C는 84.16, gamma는 0.17로 분석되었다.
Table 4.
Result of optimal hyperparameters
모형 비교를 위해 가장 많이 사용되는 척도는 정확도(accuracy)이다. 정확도는 모형의 예측 값이 실제 값과 얼마나 동일한지 측정하는 척도이다. 정확도 외의 성능 값으로 민감도(sensitivity)는 정상 보행자를 정상이라고 분류하는 능력을 나타내는 척도이며, 특이도(specificity)는 실제 배회 보행자를 배회하였다고 분류하는 능력을 나타내는 척도이다. 정밀도(precision)는 연구자가 관심을 가진 데이터를 분류하는 능력을 나타내는 척도이다(Polat et al., 2009). 최종적으로 구축한 모형의 분류정확도는 약 99.5%로 도출되었다. normal 이벤트를 normal 이벤트로 예측한 경우에 대한 민감도는 99.7%로 도출되었다. 실제 unsafe 이벤트를 unsafe 이벤트로 예측한 경우에 대한 특이도는 98.4%로 도출되었다. 마지막으로 normal 이벤트로 예측된 데이터 중 실제로 normal 이벤트인 경우에 대한 정밀도는 99.7%로 도출되었다. 구축한 모형의 Confusion matrix를 Table 5에 제시하였다.
Table 5.
Confusion matrix
| Confusion matrix | ||||
| Criterion | Predicted values | |||
| Normal (0) | Unsafe (1) | (%) | ||
| Actual values | Normal (0) | 132,472 | 365 | 99.7 |
| Unsafe (1) | 347 | 21,077 | 98.4 | |
| (%) | 99.7 | 98.3 | 99.5 | |
2. 모니터링 활용방안
본 연구에서 개발한 위험 이벤트 검지 기법은 음식 배달 이륜차의 교통안전 모니터링을 위한 라이더의 안전운전 평가에 활용될 것으로 기대된다. 분석결과 구축한 서포트 벡터 머신 모형을 활용하여 배달 이륜차 라이더의 안전운행 등급을 산정하였다. 라이더별 위험 이벤트 발생률을 riding risk index(RRI)로 정의하고 안전운행 등급을 분류하였다. RRI 산출식은 개별 라이더의 unsafe event 발생 건수에 대한 전체 주행 시간의 백분율로 Equation 9와 같이 정의할 수 있다.
단, = 라이더 의 RRI, = 라이더 의 unsafe event 건수, = 라이더 의 주행시간
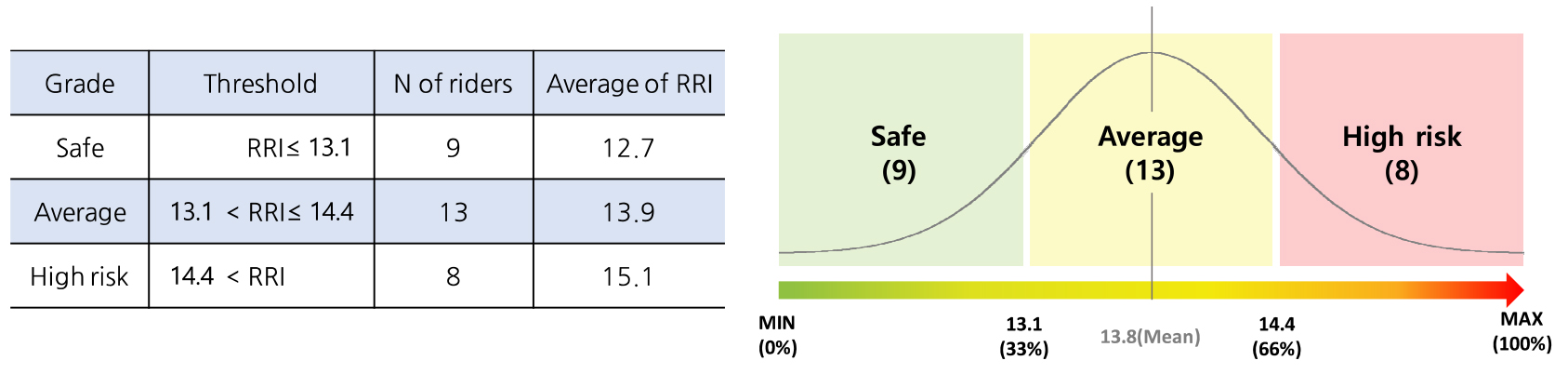
전체 30명 라이더의 RRI 산출 결과 최소값은 12.2, 최대값은 15.4로 분석되었으며 평균은 13.8로 도출되었다. 라이더별 RRI값의 분포에 따라서 33%값인 13.1과 66%값인 14.4를 임계값으로 설정하고 안전, 보통, 위험 3개 등급으로 분류하였다. 안전등급은 RRI가 13.1이하인 라이더로 9명이 분류되었으며, 보통등급은 13.1 초과, 14.4 이하인 라이더로 13명이 분류되었다. 마지막으로 위험등급은 RRI가 14.4 초과인 라이더로 8명이 분류되었다. 분석 결과 안전등급 라이더 9명, 보통 등급 라이더 13명, 위험등급 라이더 8명으로 분류되었다. 안전 등급 라이더의 RRI평균은 12.7, 보통 등급 라이더의 RRI평균은 13.9, 위험 등급 라이더의 RRI평균은 15.1로 도출되었다. 각 안전운행 등급의 기술통계량을 Table 6에 제시하였다.
Table 6.
Descriptive statistics by safe riding grade
| Safe riding grade | Average | Standard deviation | Variance | Max | Min |
| Safe | 12.75 | 0.31 | 0.10 | 13.08 | 0.00 |
| Average | 13.94 | 0.45 | 0.20 | 14.45 | 0.00 |
| High risk | 15.05 | 0.31 | 0.10 | 15.42 | 0.00 |
라이더들의 안전운행 등급별 평균 차이가 통계적으로 유의미한지 검증하기 위해서 아노바 분석을 수행하였다. 분산의 동질성 검정 결과 Levene 통계량이 2.901, 유의확률이 0.072로 등분산을 가정하였다. 아노바 분석 결과 유의확률이 0.000으로 등급 간의 평균 차이가 유의미함을 검증하였다. 따라서 scheffe기법을 활용하여 사후분석을 진행한 결과 유의확률이 0.05이하로 안전, 보통, 위험 등급 간에 모두 평균 차이가 유의미한 것으로 도출되었다. Table 7에 아노바 및 사후분석 결과를 제시하였다.
라이더들의 안전운행 등급별 평균 차이가 통계적으로 유의미한지 검증하기 위해서 아노바 분석을 수행하였다. 분산의 동질성 검정 결과 Levene 통계량이 2.901, 유의확률이 0.072로 등분산을 가정하였다. 아노바 분석 결과 유의확률이 0.000으로 등급 간의 평균 차이가 유의미함을 검증하였다. 따라서 scheffe기법을 활용하여 사후분석을 진행한 결과 유의확률이 0.05이하로 안전, 보통, 위험 등급 간에 모두 평균 차이가 유의미한 것으로 도출되었다. Table 7에 아노바 및 사후분석 결과를 제시하였다.
Table 7.
ANOVA test results
Figure 7에 라이더들의 RRI 임계값에 따른 안전운행 등급 분석 결과를 제시하였다. 안전운행 등급 분석 결과에 따라 라이더들이 crash 및 near miss 경험 여부에 대하여 응답한 설문조사 자료와 매칭하였다. 30명의 라이더에 대하여 안전운행 등급과 crash 및 near miss 경험 여부를 매칭한 결과, 보통 등급 라이더 1명, 위험 등급 라이더 2명으로 총 3명의 라이더가 위험 이벤트 경험이 있는 것으로 매칭되었다. A라이더는 RRI 13.5로 보통 등급으로 분류되었으며 crash 1건을 경험했다고 응답하였다. B와 C 라이더의 RRI는 각각 14.9, 15.4로 위험 등급으로 분류되었으며 crash 1건, near miss 1건을 경험했다고 응답하였다.
배달 이륜차 라이더의 안전운행 등급 분류 결과는 라이더의 교통안전 모니터링에 활용될 수 있다. 배달 이륜차의 주행특성을 파악하는 것과 더불어 개별 라이더의 안전운행을 평가하고 등급별 라이더를 대상으로 차별화된 개선 방안을 적용함으로써 교통사고 예방이 가능하다. 안전운행 등급 평가 결과와 같이 안전, 보통, 위험 3개의 등급별로 라이더들의 주행특성을 파악하여 라이더 맞춤형 교통안전 컨설팅이 가능하다. 특히 위험 등급으로 평가된 라이더들에 대해서 IMU센서에서 수집되는 3축 가속도 및 각속도의 패턴을 분석함으로써 보다 상세화된 라이더의 주행 패턴을 도출할 수 있을 것으로 기대된다.
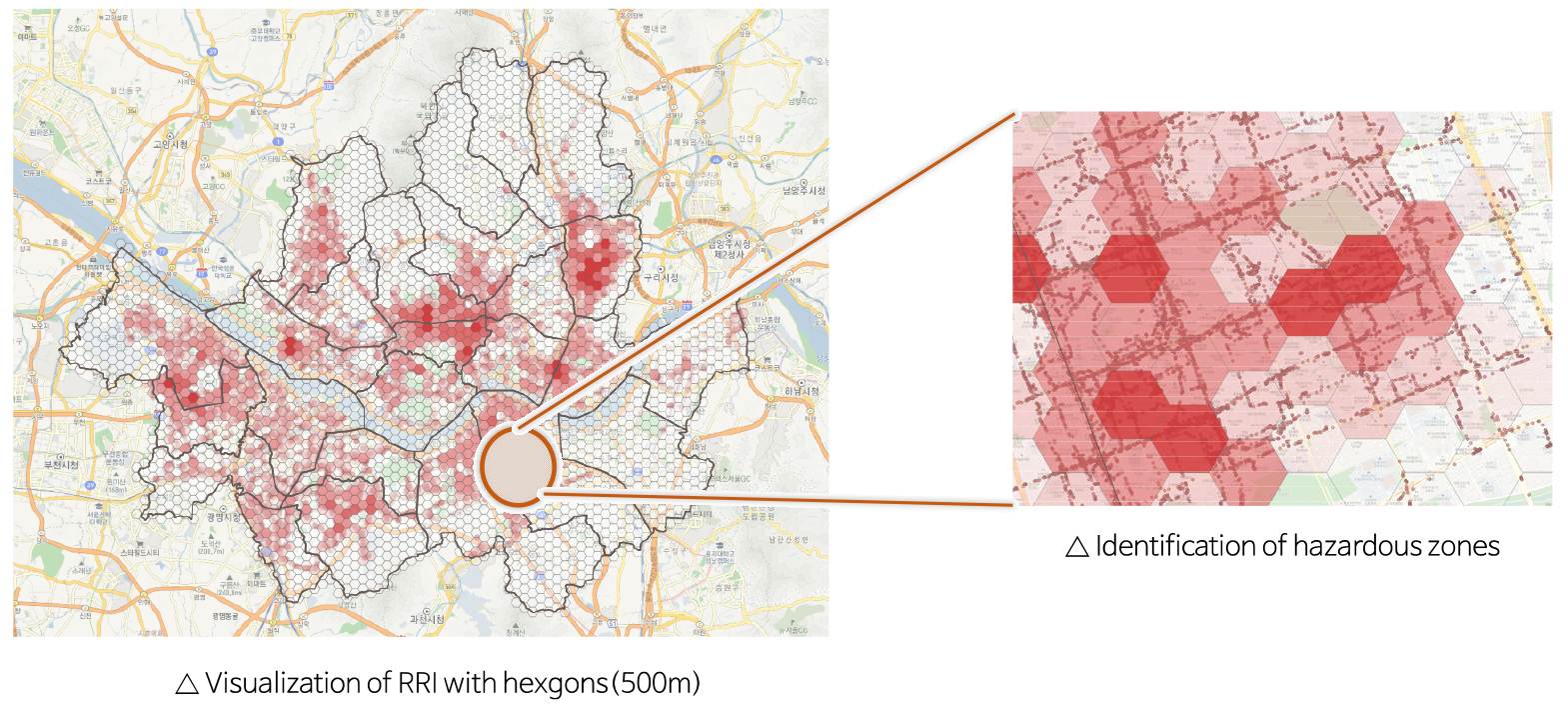
추가적으로 검지한 RRI를 지역 및 공간 단위로 집계하여 모니터링에 활용할 수 있다. Figure 8에 서울시를 대상으로 RRI를 집계하고 시각화 한 결과를 제시하였다. 500m 헥사곤 단위로 RRI를 시각화하여 타 지역에 비해 상대적으로 RRI의 발생빈도가 높은 지역을 선정하였다.
RRI 기반의 지역별 시각화 지도와 위험지역 도출 결과는 지역 단위별로 배달 이륜차의 교통사고를 예방하기 위한 대책 마련에 활용될 것으로 기대된다. 지역별 RRI의 공간적 분석 결과를 활용하여 상대적으로 배달 이륜차의 주행이 위험한 도로에 대하여 진단을 하고 도로환경 측면에서의 대안을 도출할 수 있다. 또한 라이더의 안전운행 등급별 위험지역을 분석한다면 보다 구체적인 교통안전 대책마련에 활용될 수 있을 것이다. 본 연구결과를 기반으로 주행 자료 수집 및 안전운행 등급 평가와 위험지역 시각화 결과를 통합적으로 관리하는 모니터링 시스템을 개발한다면, 배달 이륜차의 교통사고를 예방하기 위한 장기적인 대책 마련이 가능할 것으로 기대된다.
결론
사회적 거리두기로 인해 비대면으로 음식 주문이 가능한 배달 서비스에 대한 수요가 증가하고 배달 서비스에 가장 대표적으로 사용되는 교통수단인 이륜차의 교통안전이 사회적 관심사로 대두되었다. 정부에서는 불법 행위를 단속하고 라이더 대상 안전교육을 강화함으로써 이륜차의 교통사고를 예방하기 위한 노력을 기울이고 있다. 그러나 배달 이륜차 교통사고를 효과적으로 예방하기 위한 체계적인 교통안전관리 시스템의 마련이 요구되는 상황이다. 효과적인 배달 이륜차의 교통안전관리를 위해서는 일반차량과는 다른 특성을 지닌 배달 이륜차의 실제 주행 자료를 활용하여 위험이벤트를 검지할 필요가 있다. 따라서 본 연구에서는 음식 배달 이륜차 라이더의 실제 자료를 수집하여 라이더 주행 특성 기반의 위험 이벤트 검지 기법을 개발하고 활용방안을 제시하였다.
본 연구에서는 100명의 라이더들을 대상으로 실제 주행자료를 수집한 K-100NRS로부터 30명의 배달 이륜차 라이더들을 대상으로 2021년 8월 20일 하루동안 수집한 자료를 활용하였다. 속도, 가속도, 3축 가속도, 3축 각속도, 가속도 norm, 각속도 norm을 input 변수로 활용하고, 위험 이벤트 발생 여부를 output 변수로 활용하여 데이터셋을 구축하였다. 총 514,202건의 데이터 중 위험 이벤트 71,599건,일반 이벤트 442,603건으로 구성되었다. 트레이닝셋과 테스트셋의 비율을 7:3으로 설정하고 하이퍼 파라미터를 찾기 위한 그리드 서치 과정을 수행하여 최종 서포트 벡터 머신 분류 모형을 구축하였다. 구축 결과 모형의 분류정확도는 약 99.5%로 도출되었다. 최종으로 구축된 모형의 파라미터는 커널 함수는 RBF, C는 84.16, gamma는 0.17로 분석되었다. 구축한 서포트 벡터 머신 분류 모형을 활용하여 산출한 라이더별 위험 이벤트 발생률을 기반으로 라이다별 안전운행 등급을 안전, 보통, 위험 3개 등급으로 분류하였다. 분류 결과 안전등급 9명, 보통 등급 13명, 위험등급 8명으로 분류되었다. 30명의 라이더에 대해서 crash 및 near miss 설문조사 결과와 매칭한 결과 3명의 라이더가 매칭되었으며 crash 2건, near miss 1건을 경험한 것으로 도출되었다.
본 연구는 일반 용도의 이륜차를 대상으로 분석한 기존 연구와는 달리 배달 이륜차를 분석 대상으로 선정하여 위험 이벤트 검지 기법을 개발하였다는 점에서 의의가 있다. 또한 본 연구의 결과는 배달 이륜차 교통안전 대책의 마련 및 실효성있는 정책 수립을 위한 기초자료로 활용될 수 있을 것으로 기대된다. 그러나 본 연구에서는 배달 이륜차 주행 데이터는 하루동안 수집된 30명의 데이터만을 활용하였으므로 향후 100대의 데이터를 모두 분석에 활용한다면 모형의 신뢰성을 확보할 수 있을 것으로 기대된다. 또한 위험 이벤트 여부를 대상으로 분류하였으나, 추후 이륜차의 넘어짐을 고려한 세부적인 주행 이벤트 분류 모델을 구축할 필요가 있다. 본 연구의 데이터 수집 및 분석 대상은 배달 이륜차로 제한하였으나, 추후 일반 이륜차의 주행 데이터가 추가로 수집된다면 배달 이륜차와의 비교분석을 수행하여 보다 신뢰성 높은 배달 이륜차의 주행특성을 분석할 수 있을 것이다. 본 연구에서는 서포트 벡터 머신 기법만을 활용하였으나 추후에는 서포트 벡터 머신 이외의 다양한 딥러닝 방법론을 고려할 필요가 있다. 추후 배달 이륜차의 주행데이터를 추가 활용하여 위험운전행동 검지 결과를 기반으로 위험지역에 대한 상세 진단 및 분석이 추가된다면 교통안전 모니터링에 활용도가 높은 연구 결과를 얻을 수 있을 것으로 기대된다. 마지막으로 배달 이륜차 교통안전 모니터링 체계 구축을 위한 보다 구체적인 활용방안이 요구된다.
