

서론
선행연구 고찰
1. 마이크로 모빌리티 수단의 특징
2. 마이크로 모빌리티 수단의 효과에 관한 연구
3. 지형적 요인(경사)을 고려한 접근성에 관한 연구
경사를 고려한 마이크로 모빌리티 수단의 통행시간 산정 알고리즘 개발
1. 알고리즘의 개발
2. 현장실험을 통한 알고리즘의 개선
경사를 고려한 마이크로 모빌리티 수단의 통행시간 산정 알고리즘 실증
1. 연구 대상지
2. 알고리즘의 실증 방법
3. 알고리즘의 실증 결과
결론 및 향후 연구과제
서론
한국의 급속한 경제성장으로 인해 도시지역 인구비율은 1997년 87.2%에서 2019년 91.8%까지 증가하였다(Ministry of Land, Infrastructure and Transport, 2020). 도시지역의 인구집중은 다양한 도시문제를 야기하고 있으며 특히 지속적으로 증가하고 있는 자동차는 교통체증, 온실가스 배출, 교통사고 등의 도시교통문제의 원인이 되고 있다. 도시교통문제에 대한 원인을 Figure 1에서 좀 더 근본적으로 살펴보면 이동거리 5km 전후의 중단거리 통행이 전체 통행의 약 50% 수준을 차지하고 있기 때문이라고 할 수 있다.
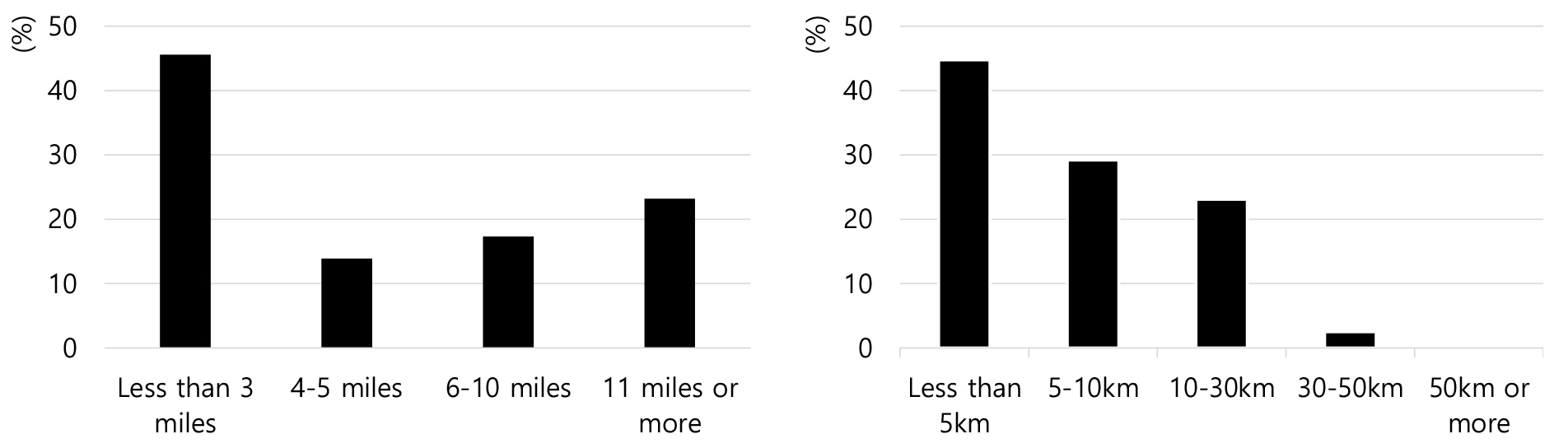
Figure 1
Ratio of number of trips by trip distance (left, the U.S. in 2017, Masoud et al., 2019, re-cited after adjusting; right, Kakao T Taxi in 2018, Kakaomobility, 2018)
이러한 중단거리 통행에 효과적으로 대처하기 위해 최근 대다수의 교통선진국들은 스마트 모빌리티(Smart Mobility) 수단들을 도입 ‧ 운영하고 있다. 일반적으로 스마트 모빌리티는 스마트 시티(Smart City) 운영을 위해 사물인터넷(Internet of Things, IoT)과 정보통신기술(Information and Communication Technology, ICT)을 통해 공유 플랫폼에서 구현되는 모든 유형의 모빌리티 수단을 의미한다. 스마트 모빌리티는 전력을 동력으로 하는 차세대 개인 이동수단인 퍼스널 모빌리티(Personal Mobility, PM) 그리고 마이크로 모빌리티(Micro Mobility)와 혼재되어 사용되고 있다. 퍼스널 모빌리티(PM)는 여가와 같은 개인적인 용도로 고안된 작고 가볍고 속도가 느린 개인 소유의 모빌리티 수단으로 정의(Shin et al., 2016)할 수 있는 반면, 마이크로 모빌리티(MM)는 교통량 및 대기오염 감소나 도시 공간의 활용도 향상 등과 같이 공공편익적인 측면의 모빌리티 수단으로 특징지을 수 있다.
최근 공유이동서비스 형태로 전 세계에 급속도로 보급되고 있는 마이크로 모빌리티의 대표적인 수단은 전동킥보드와 전기자전거라고 할 수 있다. 이 수단들은 보행보다 신속하고 대중교통으로 접근하기 어려운 곳까지 이동이 가능하며 공간적인 한계를 극복할 수 있는 비거치식(Dockless) 형식으로 운영되어 차량중심의 도시지역 중단거리 통행을 대체할 수 있다. 또한 대중교통과 연계하여 대중교통시설로의 접근성 개선과 대중교통시설로부터의 서비스 권역을 확대하여 대중교통 이용활성화를 도모할 수 있다. 따라서 전동킥도브와 전기자전거로 대표되는 마이크로 모빌리티 수단들은 광의의 대중교통 범주에 포함될 수 있을 것으로 판단한다.
이에 따라 마이크로 모빌리티 수단에 대한 다양한 연구들이 수행되고 있지만 이용자의 속성(연령, 성별 등), 기후, 지형 등과 같이 마이크로 모빌리티 수단 이용의 제한적인 요소들에 대한 충분한 이해가 부족한 편이다. 따라서 본 연구는 이러한 요소들 중 지형적인 특성인 경사에 따른 마이크로 모빌리티 수단의 통행시간 추정 알고리즘을 개발하고 현장실험을 통해 알고리즘을 개선한 후, 부산광역시에서 대중교통운행밀도가 상대적으로 높은 네 개 구(부산진구, 서구, 동구, 중구)를 대상으로 경사를 고려한 마이크로 모빌리티 수단의 실질적인 통행시간을 산정하여 알고리즘을 검증한다.
선행연구 고찰
1. 마이크로 모빌리티 수단의 특징
전동킥보드를 이용한 공유 서비스는 미국 캘리포니아주의 산타모니카를 거점으로 하는 ‘BIRD’에서 시작되어 미국, 유럽, 중동, 아시아 등 전 세계적으로 확산되고 있으며(Myeong et al., 2019) beam, Circ, Lime, Skip 등의 다양한 공유 서비스가 제공 중이다. 최근 전기자전거를 이용한 공유 서비스가 새롭게 등장하고 있어 이용자의 수요 특성에 따라 선택할 수 있는 수단의 폭이 넓어지고 있다. 국내에서는 국외에 모기업을 둔 Lime, moveit, WIND mobility 등의 업체들뿐만 아니라 국내 업체인 deer, 카카오 T 바이크, ZET 등 현재 약 19개의 업체가 마이크로 모빌리티 수단을 이용한 공유 서비스를 제공 중이다(Ha, 2020).
전동킥보드와 전기자전거는 마이크로 모빌리티의 대표적인 수단으로 출발접근(First-Mile Mobility, FMM)과 도착접근(Last-Mile Mobility, LMM)서비스에 활용되고 있다(Kim et al., 2019). 이 수단들은 과도한 거리와 보행시간을 단축시켜 중단거리 통행을 대체할 수 있게 하며 대중교통 정류장에 대한 접근을 용이하게 하는 특징이 있다. 최근 출발접근(FMM)과 도착접근(LMM) 서비스는 전통적인 거치식(Station-based) 방식과 달리 이용자의 편의를 위한 비거치식(Dockless) 방식으로 운영되어 이용자의 증가를 유도하고 있다.
Table 1은 마이크로 모빌리티 수단의 거치식(Station-based)과 비거치식(Dockless) 운영방식의 근본적인 차이를 요약하고 있다. 가장 큰 차이는 마이크로 모빌리티 수단의 대여와 반납 장소의 유동성 유무라고 할 수 있으며, 비거치식(Dockless) 방식을 중심으로 살펴보면 상대적으로 활동인구가 많은 곳에 적합하고, 지형의 여건에 영향을 적게 받으며, 수단의 재배치가 필요하지만 출발접근(FMM) 그리고 도착접근(LMM) 서비스에 좀 더 적합한 수단으로 정의할 수 있다. 하지만 공간적으로 무분별한 반납으로 인해 발생하는 문제점들도 상존하고 있다.
Table 1.
Comparison of micro-mobility service by operating method (Wang et al., 2019; re-cited after adjusting)
2. 마이크로 모빌리티 수단의 효과에 관한 연구
마이크로 모빌리티 수단은 대도시의 이동성과 접근성을 개선하기 위한 새로운 형식의 교통수단으로 교통 혼잡과 대기오염 배출을 완화할 수 있다(Reed, 2019; Hardt and Bogenberger, 2019). Dekker(2013)는 네덜란드에서 전기자전거의 이용을 통해 차량 통행의 33%와 자전거 통행의 33%를 대체할 수 있으며 1년간 판매된 25만대의 전기자전거는 30KT의 이산화탄소 배출량을 감축시킬 수 있다고 밝혔다. Hiselius and Svensson(2017)은 스웨덴에서 전기자전거의 보급이 차량 통행을 대체함으로써 1인당 이산화탄소 배출량의 약 14-20%를 감축하는 것을 확인하였다. 또한 Berjisian and Bigazzi(2019)는 전기자전거로 대체할 수 있는 통행량을 산정하였고 전기자전거의 이용이 연평균 약 2,000km의 차량 주행 거리를 감소시켜 연간 460kg의 CO2 배출량을 절감함과 동시에 주당 21분의 신체 활동량을 증가시킬 것으로 예상하였다.
마이크로 모빌리티 수단은 출발접근(FMM)과 도착접근(LMM)서비스를 제공함으로써 대중교통 정류장으로의 접근을 개선하여 차량 중심의 통행량을 줄일 수 있다(Barnes, 2019; Jørgensen et al., 2019; Shaheen and Martin., 2015). Lin(2016)은 전기자전거 이용자, 자전거 이용자, 운전자, 보행자, 경찰 등 다양한 그룹을 대상으로 설문조사를 실시하여 전기자전거는 통행시간 단축과 우수한 접근성으로 기종점 통행에서 중간 이동 수단으로서 사용 될 수 있을 것으로 기대하였다. 중국의 비거치식(Dockless) 자전거 공유 서비스인 Mobike는 베이징의 대중교통 정류장 500m 범위 내에 집중적으로 서비스를 제공한 결과, 교육과 의료시설은 물론 직장에 대한 접근성이 두 배 정도 개선되는 것으로 나타났다(Zarif et al., 2019).
3. 지형적 요인(경사)을 고려한 접근성에 관한 연구
특정 시설이나 서비스에 대한 접근성은 주로 접근시간을 중심으로 평가하고 있다. Bok and Kwon(2016), Tribby and Zandbergen(2012), Kraft(2016), Balya et al.(2016)은 출발지에서 대중교통 시설까지의 접근시간을 대중교통 서비스에 영향을 미치는 주요 요인으로 판단하였다. 이와 같이 접근시간은 주로 도보를 중심으로 분석되고 있으며 Zielstra and Hochmair(2011), O'Neill et al.(1992)은 대중교통 환승 가능성을 측정하기 위한 지표로 환승지점에서 도보거리로 정의된 이동시간과 서비스 지역을 사용했다. Hsiao et al.(1997), Zhao et al.(2003), El-Geneidy et al.(2009)은 버스정류장 주변 400m와 지하철역 주변 800m를 대중교통 서비스 권역의 도보거리로 고려하였다.
Lee and Ahn(2007)은 보행시간에 영향을 미치는 다양한 요소들을 도출하는 과정에서 가로환경 변수 중 경사가 보행시간에 부정적인 영향을 미치는 것을 밝혔다. Kang and Park(2009)은 경사는 보행이동의 장애요소로 작용하여 이동이 불편해지는 현상을 관찰하였다. Ha(2012)는 단순한 평면상의 네트워크 거리는 보행에 영향을 주는 지형적 특성이 반영되지 않아 보행자가 실제로 체감하는 이동거리와는 차이가 있다는 것을 밝혔다. 또한 지형을 고려하지 않은 자전거도로의 건설로 인하여 오르막길에서는 자전거를 이용할 수 없거나 내리막길에서는 위험한 경우도 있다. 이러한 연구들은 대중교통 시설과 같은 특정시설에 대한 접근성이나 서비스 권역을 평가함에 있어서 지형에 대한 고려가 필요하다고 제안하고 있다.
출발지로부터 대중교통 정류장 등과 같은 목적지에 대한 접근성이나 대중교통 정류장 등의 서비스 권역을 주제로 하는 기존의 연구들은 보행을 주요 수단으로 고려하고 있으며, 분석 노드를 중심으로 버퍼 등을 형성하여 단순 직선거리를 이용하거나 경사를 고려하지 않고 평지를 가정하여 분석하고 있다. 하지만 본 연구는 중단거리 도시통행을 대체할 수 있는 전동킥보드와 전기자전거의 통행시간을 기종점을 연결하는 최단경로에서 실질적인 경사를 고려하여 분석하는 알고리즘을 개발하고 실제 대상지에서 그 알고리즘을 검증한다는 차원에서 기존의 연구들과 차별화된다고 할 수 있다.
경사를 고려한 마이크로 모빌리티 수단의 통행시간 산정 알고리즘 개발
1. 알고리즘의 개발
본 연구는 보다 현실적인 마이크로 모빌리티 수단의 이동성을 평가하기 위해 전동킥보드와 전기자전거를 중심으로 경사지에서의 속도 및 통행시간 산정 알고리즘을 개발한다. Figure 2와 Table 2는 경사에 따른 마이크로 모빌리티 수단의 속도 및 통행시간 산정 알고리즘과 가상코드(Pseudo Code)를 나타내고 있다.
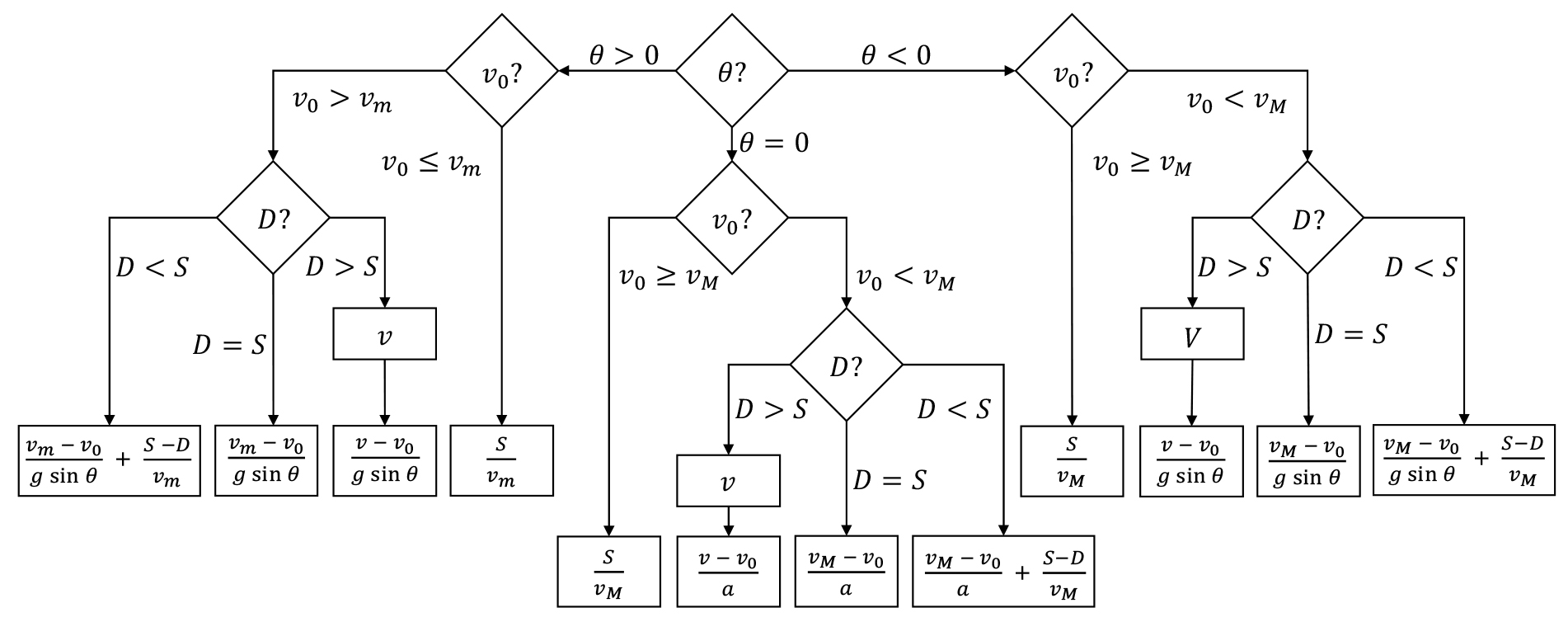
Table 2.
Pseudo codes for calculating slope-dependent speed and travel time of micro mobility modes
본 연구에서는 경사에 따른 마이크로 모빌리티 수단의 최저속도와 최고속도를 5kph와 25kph로 정의하고 있다. 최저속도 5kph는 보행속도보다 빨라야 한다는 가정에서 정의하였으며 최고속도 25kph는 국내 마이크로 모빌리티의 현행법에서 정의하고 있는 최고속도가 25kph(Korea Ministry of Government Legislation, 2018, 2020)이기 때문이다.
여기서, : inclination angle
: speed at the starting point of the link(kph)
: minimum speed(i.e., 5kph)
: maximum speed(i.e., 25kph)
: distance necessary to reach the target speed(i.e., minimum or maximum speed)
: slope distance of the link(m)
: speed attained at the ending point of the link(kph)
: acceleration on the flat link(m/s2)
: gravitational acceleration(i.e., 9.81m/s2)
: travel time of micro mobility modes
구체적으로 살펴보면, 오르막 경사()인 링크 시작지점에서 최저속도인 5kph로 통행을 시작할 경우, 5kph를 링크 끝점까지 적용하여 통행시간을 구한다. 링크 시작지점에서의 속도가 5kph보다 클 때, 최저속도(5kph)에 도달하기 위해 필요한 거리()에 따라 두 가지 경우로 구분하여 통행시간을 산정한다. 해당거리()가 링크의 경사거리()보다 길거나 같을 경우, 가속도 정의에서 구한 통행시간 공식(, )을 사용한다. 또한, 해당거리()가 링크의 경사거리()보다 짧을 경우, 최저속도에 도달하기 위해 필요한 거리의 통행시간에 나머지 경사거리(-)에 대한 통행시간을 더한 값()을 사용한다.
평지()인 링크 시작지점에서 최대속도인 25kph로 통행을 시작할 경우, 25kph를 링크 끝점까지 적용하여 통행시간을 구한다. 링크 시작지점에서의 속도가 25kph보다 작을 때, 최대속도에 도달하기 위해 필요한 거리()가 링크의 경사거리()보다 길거나 같을 경우, 가속도 정의에서 구한 통행시간 공식(, )을 사용한다. 또한, 해당거리()가 링크의 경사거리()보다 짧을 경우, 최대속도에 도달하기 위해 필요한 통행시간에 나머지 경사거리(-)에 대한 통행시간을 더한 값()을 사용한다. 본 알고리즘에 사용하는 평지에서의 가속도는 현장실험을 통해 측정된 평균 가속도를 적용한다.
내리막 경사인 경우()는 평지()와 동일한 방식으로 마이크로 모빌리티 수단의 통행시간을 구한다. 단, 평지와는 달리 평지가속도()대신 경사가속도()를 사용하여 통행시간을 산정한다.
2. 현장실험을 통한 알고리즘의 개선
본 연구에서 개발한 알고리즘의 구현을 위해서는 개별 링크의 경사거리()와 평지에서 마이크로 모빌리티 수단의 가속도()를 사전에 산출하여야 한다. 개별 링크의 경사거리()는 GIS를 통해 링크의 시작점과 끝점에 표고를 부여함으로써 계산이 가능하지만 개별 수단의 특성에 해당하는 평지가속도()는 실제 주행을 통해서만 산출이 가능하다. 따라서 본 연구는 Figure 3과 같이 약 70m의 평지에서 GPS logger를 장착한 전동킥보드와 전기자전거의 주행을 통해 마이크로 모빌리티 수단의 평지가속도()를 산출하였다.
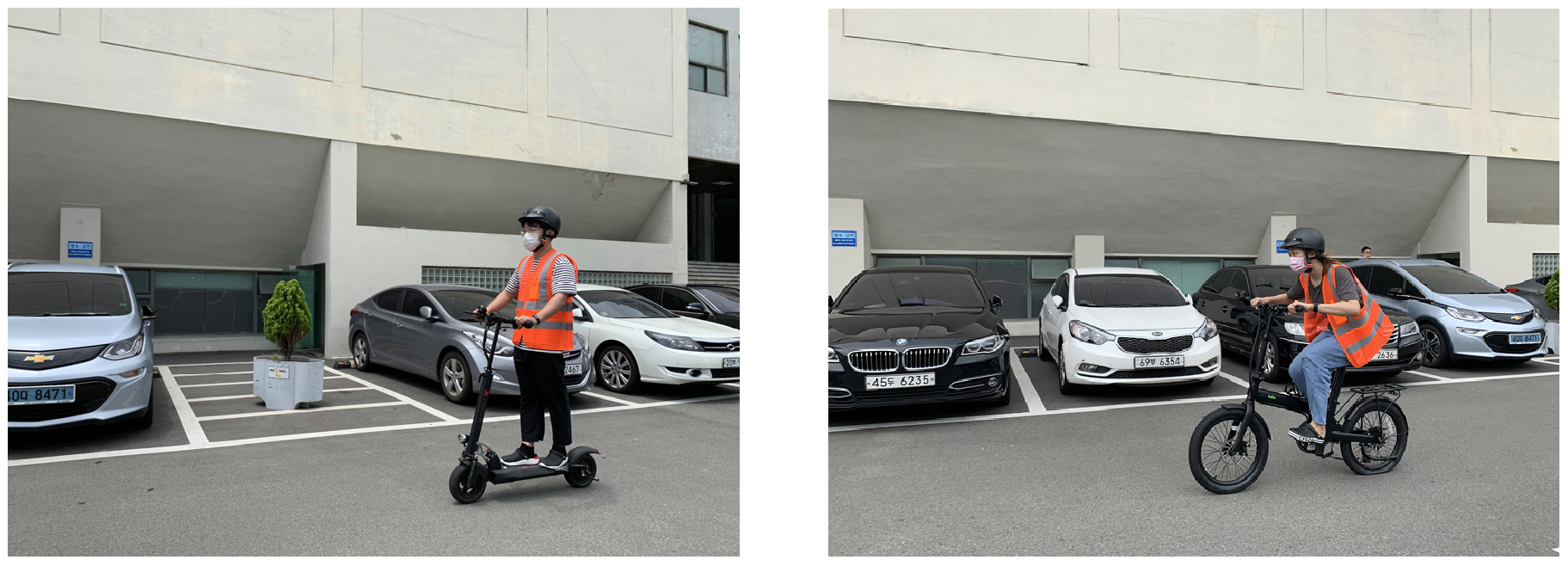
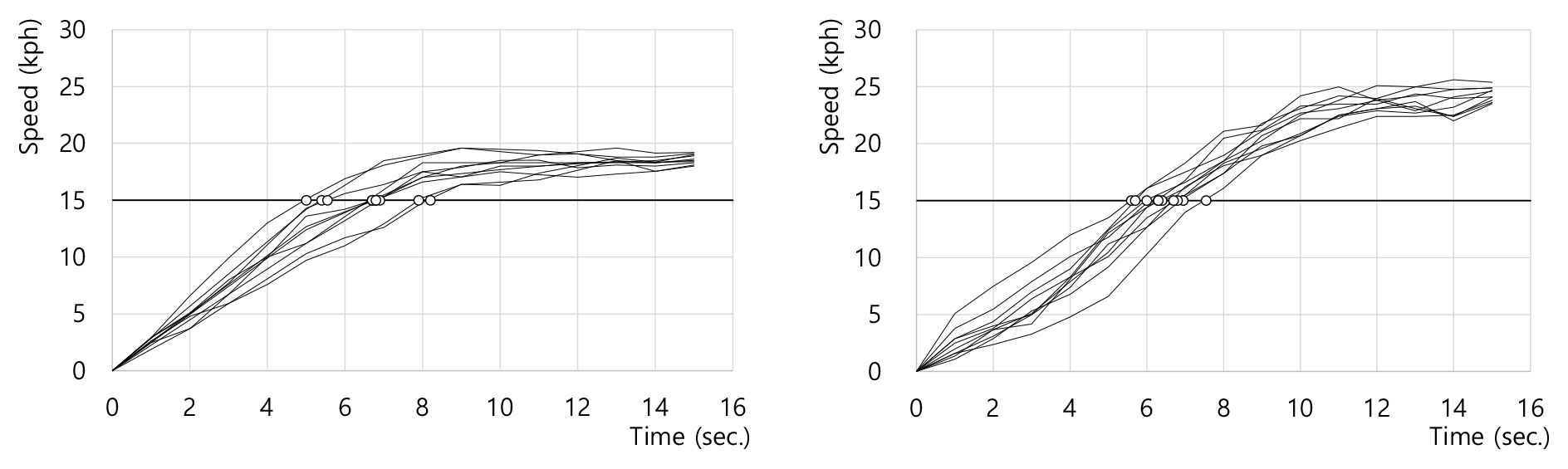
Figure 4는 평지에서 전동킥보드와 전기자전거를 각각 십 회 주행한 궤적을 나타낸다. 전기자전거와는 달리 전동킥보드의 경우, 법적인 최대속도인 25kph에 도달하지 못 해 두 수단 공통적으로 15kph에 도달하는 시간을 측정하여 평지가속도()를 산출하였다. 그 결과, 두 수단의 평균 가속도는 0.65mps2로 동일하게 측정되었으며 개발된 알고리즘의 평지 통행시간 산정에 사용하였다.
경사를 고려한 마이크로 모빌리티 수단의 통행시간 산정 알고리즘 실증
1. 연구 대상지
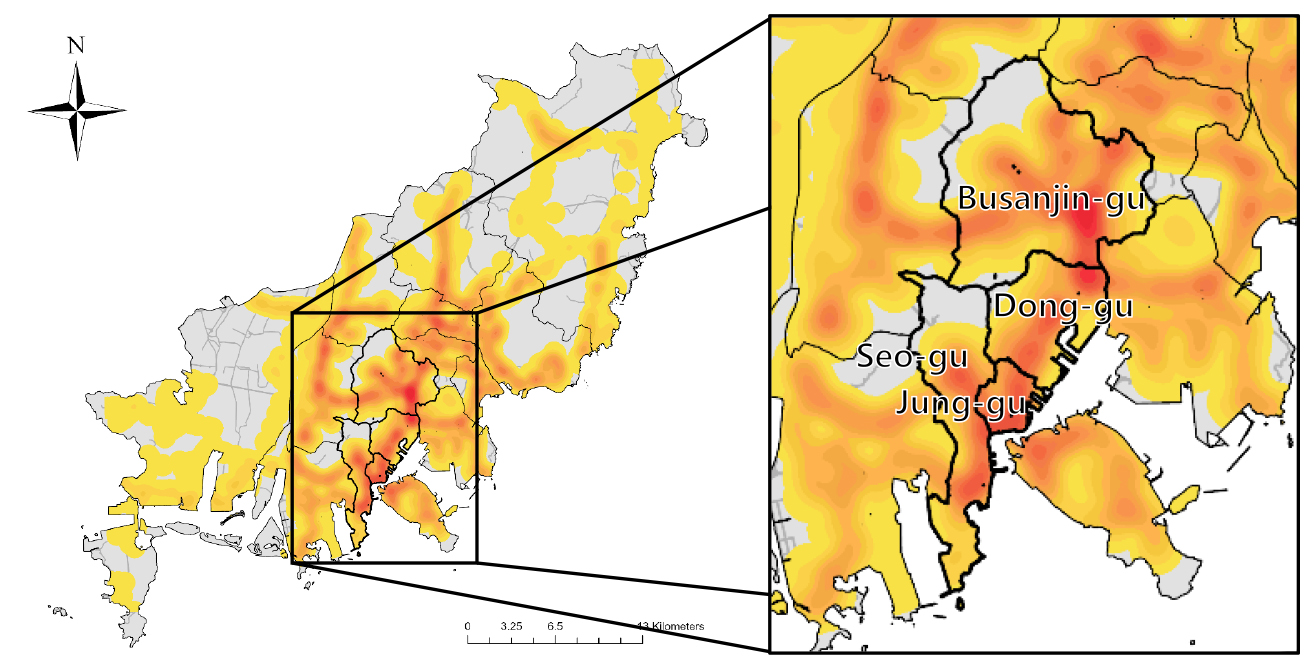
본 연구에서 개발한 알고리즘을 실증하기 위한 연구대상지로는 전형적인 경사지인 부산광역시를 선택하였으며 경사로 구성된 경로의 기종점에 알고리즘을 적용하기 위하여 주거지와 대중교통 정류장을 잇는 경로들을 분석에 사용하였다. 따라서 본 연구는 대중교통 서비스가 상대적으로 잘 조성되어 있는 지역을 선택하고자 공간상의 점(point) 분포 패턴을 효과적으로 나타낼 수 있는 커널밀도 분석(Choi et al., 2008)을 실시하였다.
본 연구에서는 부산광역시의 버스정류장과 지하철역의 공간적인 분포(대중교통 정류장별 운행노선)와 운행정보(1일 운행회수, 정류장별 1일 총 운행 수(운행노선×운행회수))를 토대로 대중교통 정류장으로부터 1km 범위까지 분석 반경을 설정하고 커널밀도 분석을 통해 1km2당 대중교통 운행회수의 밀도를 산정하였다(Park et al., 2018). Figure 5는 커널밀도 분석에 의해 도출된 부산광역시의 대중교통 운행밀도를 나타내고 있으며 상대적으로 운행밀도가 높은 네 개 구(부산진구, 서구, 동구, 중구)를 구체적인 연구대상지로 선정하였다.
2. 알고리즘의 실증 방법
커널밀도 분석을 통해 도출된 부산광역시의 네 개 구(부산진구, 서구, 동주, 중구)를 대상으로 출발지(주거지)에서 대중교통 정류장까지의 통행과 그 반대의 통행에 대해서 GIS 네트워크분석(Network Analysis) 중 시설에 대한 최단거리(Closest facility) 기능을 이용하여 최단거리경로를 도출하고 개별 경로들을 직선의 링크들로 세분화하였다. 세분화된 링크의 양 끝점에 표고 값을 부여한 후, 링크의 직선거리와 양 끝점 표고 값의 차이를 이용하여 모든 링크의 경사와 경사거리를 계산하였다.
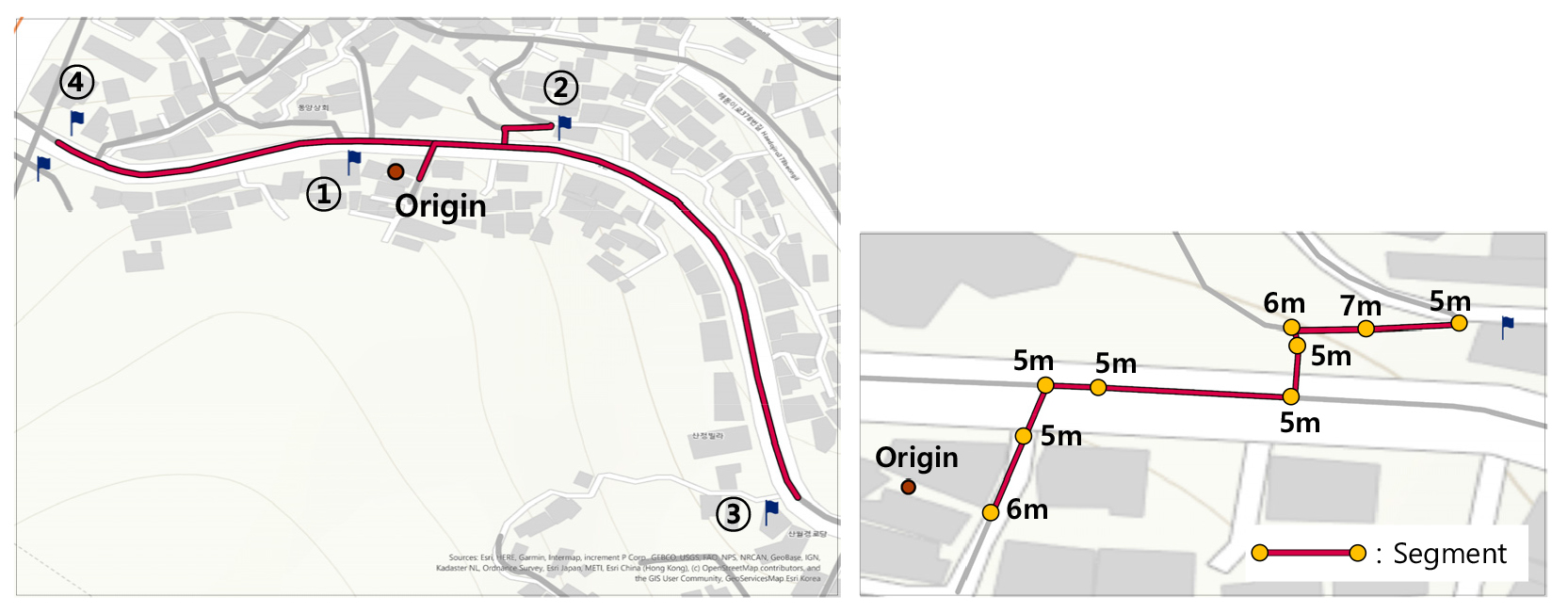
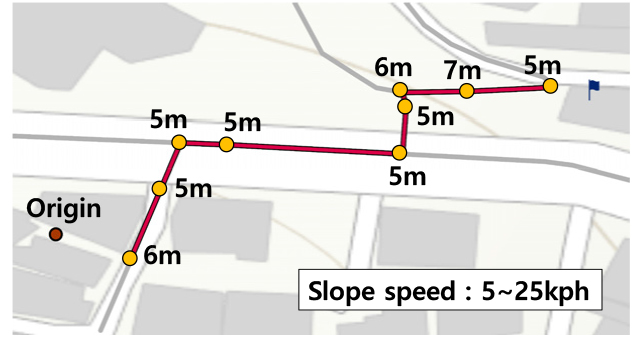
링크별 경사와 경사거리를 개발된 알고리즘에 적용하여 경사에 따른 마이크로 모빌리티 수단의 속도와 통행시간을 추정하였다. 이 때 평지가속도는 현장실험에서 구한 0.65mps2를 사용하였다. Figure 6의 왼쪽은 GIS 네트워크분석 최단거리 기능을 이용하여 부산광역시 서구 서대신동 해돋이로에 위치한 특정 주거지로부터 가장 가까운 네 개의 대중교통 정류장을 탐색한 결과이고, Figure 6의 오른쪽은 여덟 개의 링크로 구성된 두 번째 경로에서 개별 링크의 양 끝점에 표고 값을 부여한 결과이다.
3. 알고리즘의 실증 결과
Figure 2에서 제안한 알고리즘을 현장실험을 통해 개선하고 검증하기 위해 Table 3은 출발지(주거지)에서 대중교통 정류장까지의 통행과 그 반대의 통행에 대해서 경사거리와 경사속도의 반영여부에 따른 마이크로 모빌리티 수단의 통행시간 산정 방법을 나타내고 있다.
Table 3.
Travel time analysis method of micro mobility mode depending on slope-dependant distance and speed
| (a) Flat+Max. speed (25kph) | (b) Slope+Max. speed (25kph) | (c) Slope+Slope speed (5-25kph) |
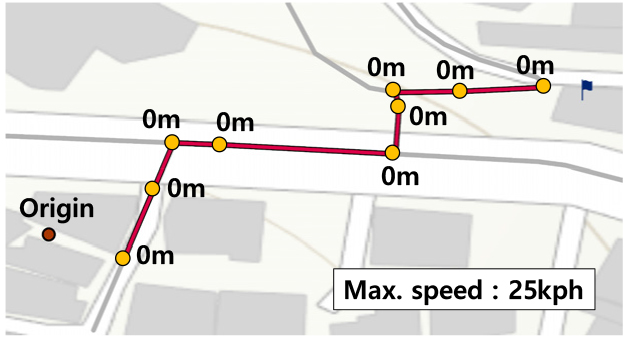 | 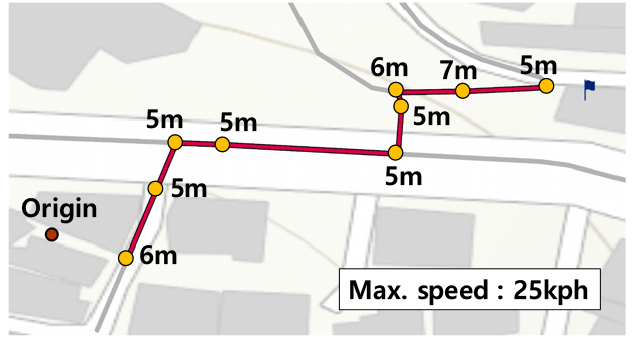 |  |
동일한 경로에서 경사의 반영 여부에 따라 개별 링크의 거리는 평지거리와 경사거리로 정의할 수 있으며 통행속도는 최대속도와 경사속도(5-25kph)로 정의할 수 있다. 따라서 본 연구는 기존 연구에서 고려하지 않는 경사에 따른 링크의 길이나 통행속도를 반영하여 동일한 경로에서 기존 연구에서 도출되는 연구결과와 본 연구에서 개발한 알고리즘에 의해 도출되는 결과를 비교하였다.
Figure 7은 부산광역시에서 대중교통 운행밀도가 높은 네 개 구(부산진구, 서구, 동구, 중구)에 위치한 모든 출발지(주거지)로부터 대중교통 정류장까지 각각 네 개의 최단경로 통행(11,576 통행)과 모든 대중교통 정류장으로부터 목적지(주거지)까지 각각 네 개의 최단경로 통행(5,560 통행)에 대해 Table 3의 세 가지 통행시간 산정방법을 적용하여 개별 통행시간 급간에 해당하는 경로수의 비율을 나타내고 있다.
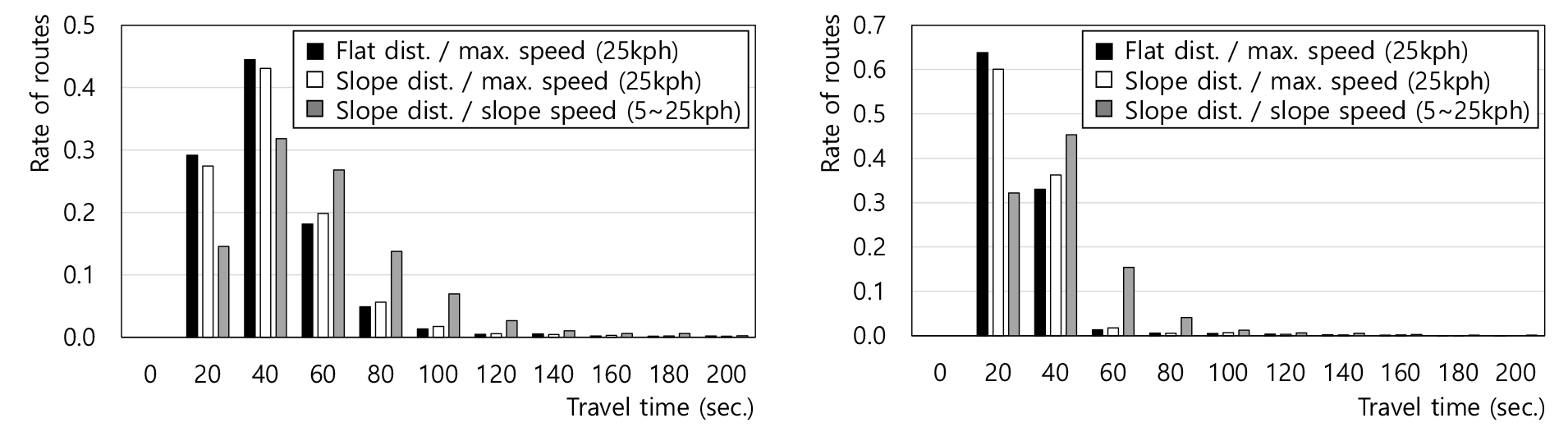
양방향 통행에 있어서 경로의 경사에 관계없이 최대속도(25kph)로 주행할 경우, 개별 통행시간 급간에 해당하는 경로수의 차이가 크지 않아 거의 일정한 통행시간을 나타내고 있다. 이에 반해 본 연구에서 개발한 경사에 따른 통행시간 산정 알고리즘으로 구한 통행시간은 경사의 정도에 관계없이 최대속도로 구한 통행시간보다 짧게 나타나고 있다. 다시 말해, 통행시간이 짧은 급간(출발지에서 대중교통 정류장까지의 통행에서 20초나 40초 그리고 대중교통 정류장에서 목적지까지의 통행에서 20초)에서는 경사속도를 반영한 경로의 비율이 낮은 반면 통행시간이 상대적으로 긴 급간(출발지에서 대중교통 정류장까지의 통행(Figure 7 left)에서 60초 이상과 대중교통 정류장에서 목적지까지의 통행(Figure 7 right)에서 40초 이상)에 해당하는 경로수의 비율은 크게 나타나는 것을 알 수 있다. 따라서 본 연구에서 개발한 경사를 고려한 마이크로 모빌리티 수단의 통행시간 추정 알고리즘은 기존의 연구와 차별화되는 좀 더 현실적인 결과를 도출하고 있다고 할 수 있다.
결론 및 향후 연구과제
세계 주요 도시의 중단거리 통행은 교통혼잡과 온실가스 배출과 같은 심각한 도시교통문제를 야기하는 주요 원인이 되고 있다. 최근 이러한 문제를 해결하기 위해 교통선진국을 중심으로 전동킥보드와 전기자전거로 대표되는 마이크로 모빌리티 수단을 도입하고 있다. 이 수단들은 IoT와 ICT의 구현을 통한 비거치식(Dockless) 운영방식으로 공간의 한계를 극복하여 중단거리 통행을 대체할 수 있을 뿐만 아니라 출발접근(FMM)과 도착접근(LMM)서비스의 역할을 수행할 수 있어 대중교통 서비스를 개선할 수 있다는 장점이 있다.
마이크로 모빌리티 수단에 대한 다양한 연구가 수행 중에 있지만 수단의 성능에 영향을 미치는 인적 특성, 기후, 지형 등에 대한 연구는 부족한 상황이다. 본 연구는 이러한 요소 중 지형의 특성에 해당하는 경사가 수단의 성능에 미치는 영향을 분석하기 위해 경사에 따른 마이크로 모빌리티 수단의 통행시간 산정 알고리즘을 개발하고 부산광역시에서 대중교통 운행 밀도가 높은 네 개 구(부산진구, 서구, 동구, 중구)에서 그 알고리즘을 실증하였다.
본 연구는 출도착지의 경로를 구성하는 직선 링크들의 양 끝점에 표고를 정의하여 링크들의 경사와 경사거리를 산정한 후, 경사에 따른 가감속도를 산정하여 최저속도(5kph)와 최대속도(25kph) 범위 내의 경사속도를 산정하였다. 평지에서의 가속도는 현장실험을 통해 0.65mps2으로 도출하였으며 개발된 알고리즘에 적용하여 경사가 반영된 경로에서 마이크로 모빌리티 수단의 통행시간을 도출하였다.
부산광역시 연구대상지에서 출발지(주거지)와 대중교통 정류장을 연결하는 통행(11,576 통행)과 그 반대방향의 통행(5,560 통행)들을 대상으로 최대속도(25kph)로 주행하는 경우의 통행시간과 본 연구에서 개발한 알고리즘을 통해 구한 통행시간을 비교한 결과, 통행시간이 짧은 급간에서는 경사속도를 반영한 경로의 비율이 낮은 반면 통행시간이 상대적으로 긴 급간에 해당하는 경로수의 비율은 높게 나타나는 것을 알 수 있었다. 따라서 본 연구에서 개발한 경사를 고려한 마이크로 모빌리티 수단의 통행시간 추정 알고리즘은 좀 더 현실적인 결과를 도출하고 있다고 할 수 있다.
결론적으로, 본 연구에서 고려한 경사와 같이 마이크로 모빌리티 수단의 이용에 영향을 미치는 요소들에 대한 충분한 이해가 부족하다면 서론에서 제시된 해당 서비스의 긍정적인 효과를 기대할 수 없다. 이와 더불어 이용자들의 특성에 대한 분석도 병행해야지만 더 현실적인 연구가 될 것으로 판단한다. 현행법상 자전거 도로에서만 마이크로 모빌리티 수단의 이용이 가능함에도 불구하고 본 연구는 도로의 사용 및 형태를 고려하지 않고 이동 경로를 분석하였다. 따라서 향후 연구에서는 실질적으로 해당 수단이 통행할 수 있는 경로를 대상으로 분석이 진행될 필요가 있다. 향후 연구에서는 실질적으로 수단이 통행할 수 있는 경로를 대상으로 분석이 진행 될 필요가 있다. 또한 마이크로 모빌리티 수단을 이용한 대중교통 서비스의 활성화를 위하여 출발접근(FMM)과 도착접근(LMM)의 서비스 권역에서 보행시간 단축에 대한 정량적인 분석을 통해 도시교통문제를 경감하기 위한 수단으로 마이크로 모빌리티 서비스를 적극적으로 도입할 필요가 있다.
