

서론
우리나라 전체 교통사고 중 49.8%가 교차로 지역에서 발생하는 것으로 집계되고 있다(KOROAD, 2020). 교차로 주변에는 상충 요인이 많아 교통사고 발생 위험이 상대적으로 높다. 비신호 교차로의 사고를 예방하기 위해선 교차로 인근 안전시거를 확보하는 것이 중요한 요소이다(Park et al., 2007). 하지만, 야간, 우천과 같은 상황 안전시거 확보의 어려움이 있거나, 장애물로 인한 안전시거 확보가 불가능한 경우 비신호 교차로의 안전을 담보하기 어렵다.
항만, 공사장 등과 같은 지역에서 대형 컨테이너로 인한 안전시거 확보 어려움이 존재한다. 항만 내 사고 분석결과 안전시거 미확보로 인해 발생하는 교차로 내 직각 충돌사고가 70% 이상의 수준을 보였다(Busan Port Terminal Co, 2019). 또한, 장기간 잦은 운전으로 인해 발생하는 운전자들의 졸음운전으로 인한 추돌사고의 위험성도 상당하다. 항만 컨테이너 야적장의 경우 개인이 소유하는 ‘사도’로 신호등과 같은 교통안전시설 설치에 제한이 있다. 이는 항만 내 도로에 대한 안전관리 문제점을 발생시킨다. 또한, 대형 트럭 및 하역 장비들로 인한 사고 발생 시 위험도가 매우 높다. 항만 내 이동장비 사고 통계를 봤을 때, 80% 이상의 사고들이 사망 사고로 이어졌다(Korea Port Logistics Association, 2020).
현재 국내 ‧ 외에서 항만에 4차 산업혁명 기술을 적용해 연구되는 스마트항만에서도 항만의 자동화 및 효율화에 초점이 맞춰져 있다. 항만 안전성을 위한 기술로는 크레인, 근로자를 대상으로 하는 안전관리 기술을 개발할 뿐 항만 도로를 이용하는 이동장비에 대한 안전관리 기술에 관한 연구가 부족하다.
항만 도로의 안전시거 미확보 문제 및 사고 심각도에 대한 문제가 지속해서 발생하고 있음에도 적절한 안전조치가 마련되고 있지 않다. 이처럼 항만 교차로 내 안전시거 미확보로 인한 문제점을 해결하기 위해 항만 야적장 내 이동장비의 안전관리 방안 마련이 필요하다. 본 논문은 항만 도로의 안전관리를 위한 조치로 안전시거가 확보되지 않는 상황에서 차량의 안전한 교차로 통행을 위해서 다음과 같은 세부 목적을 가진다.
• 항만 내 이동장비 안전확보를 위한 사고위험 예측 및 평가 모형 개발
• 모의실험과 현장실험을 통한 제안된 모형 평가
본 연구는 항만 지역 컨테이너 터미널 내 도로로 공간적 범위를 한정하였다. 해당 공간적 범위 내에서 안전관리를 위해 본 연구에서 제안하는 이동객체의 내용적 범위는 (1) 야드 트럭, (2) 지게차, (3) 리치스태커, (4) 탑핸들러, (5) 일반 승용차로 제한하였다. 이를 반영하기 위하여 이들 이동객체에 설치되는 차내 단말기로부터 수집되는 정보를 2차원 공간에서 해석하였다. 내용적 범위에서 이동식 크레인을 제외하며 이동객체 높이에 대한 정보는 추가적으로 고려하지 않았다.
선행연구 고찰
항만 내 도로를 이용하는 이동장비 사고를 관리하는 기술에는 크레인과 근로자에 대한 사고관리 기술로 치중되어 있어 항만 야드 트럭, 지게차 등과 같은 이동장비를 대상으로 하는 사고관리 기술은 부족하였다. 본 논문 주제와 유사한 도로 교차로 사고 예방을 위한 사고 회피 기술(Collision Avoidance Systeml, CAS)와 상충에 관한 기존 선행연구를 검토하였다.
상충과 사고와의 관계를 Hydén(1987)은 4단계로 나누어 설명하였다. 일반적인 도로 상황을 설명하는 Undisturbed Passage와 상충발생 가능성을 내포하는 Potential Conflict, 두 차량 간 상충의 발생을 명확히 찾을 수 있는 Slight Conflict, 급격한 사고 회피행동을 취하는 Serious Conflict로 제시하였다.
Cho and Kim(2014)은 차량 대 차량(Vehicle to vehicle, V2V) 기반 교차로 충돌 경고 시스템을 제안했다. 알고리즘은 차량 간의 상대 거리와 상대 각도를 통해 교차 예상시간(Time to Intersection, TTI)을 계산하여 TTI 임계값 2.7초, 1.7초, 0.8초보다 낮아질 때 경고가 필요함을 제안하였다. 이들은 드라이빙 시뮬레이션을 통한 알고리즘 실험을 진행하여 실제 제안된 시스템을 적용할 수 있는 방안에 대한 설명을 누락하였다.
교차로 충돌 예방이 중요하지만, 기술적인 한계로 인해 기술개발이 이루어지지 않고 있다고 지적한 Ronald and Qingfeng(2002)은 V2V 기반의 교차로 충돌 회피 기술의 소프트웨어 아키텍쳐 및 시스템 설계안을 제시하여 실제 현장적용 가능성을 확인하였다. V2V 기반 교차로 충돌방지 알고리즘을 개발한 Tianping et al.(2012)은 인근 차량의 위치, 속도 등의 정보를 무선 통신을 통해 교환해 TTC와 회피 예상시간(Time to Avoidance, TTA) 비교를 통해 4단계의 경고 단계를 차량에게 제공하는 알고리즘을 제안하였다. 저자는 차량의 차선 변경 및 차량의 제원을 고려하지 않는 상황에서 알고리즘 실험을 수행하였으며, 수행결과 충돌 경고 알고리즘의 유효성을 입증하였다.
충돌 회피를 위한 개선된 TTC 계산방법을 제시한 Felipe et al.(2013)은 기존 TTC의 경우 차량의 중심점을 기초로 계산되어 차량의 크기와 상대 차량의 방향과 같은 요소가 고려되고 있지 않다고 지적하였다. 그는 두 차량이 직각 충돌을 할 때 충돌지점에서의 상대 각도에 따라 차량 간 사고 발생 유형이 달라지는 점에 대해서 총 32가지로 분류했으며 그중 10가지 사고 가능 유형에 대해 정립하였다. 유형 정립 후 두 차량 사이의 예상 충돌시간을 보다 정확하게 계산하는 방법을 통해 직각 교차로뿐 아니라 다양한 각도의 교차로에서 정확한 TTC를 계산하는 방안을 제안하였다.
도로교통에서 연구되고 있는 사고 회피 기술 외에 항만 및 공사지역에서 장비들의 사고방지를 위해 Anurag et al.(2008)은 위성위치확인시스템(Global Positioning System, GPS)을 통한 충돌방지시스템을 개발하였다. 그들은 차량의 현재 위치, 방향과 차량의 예상 정지 위치를 통해 차량의 안전구역(Safety Corner)을 설정하여 차량의 구역이 중복될 때 차량 운전자에게 경고신호를 제공하는 시스템을 개발하였다. 항만 내 안전기술 개발을 통한 안전관리시스템으로써 독일 함부르크의 Hamburger Hafen und Logistik AG(HHLA) 컨테이너 터미널은 레이저 기술을 활용하여 항만 내 하역 장비에 대한 사고방지 기술을 도입하였다. 크레인의 충돌방지를 위해 레이저 기술을 통한 크레인 이동 경로상의 장애물에 대한 충돌 경고를 운전자에게 제공하였다(PEMA, 2015). 국내 항만의 스마트항만 개발을 위해 Korea Maritime Institute(2017)는 사물인터넷(Internet of things, IoT) 및 빅데이터 기술 도입을 통해 작업자-장비-환경 간 정보연계를 구축해 실시간으로 안전을 확보하는 시스템 기술을 제안하였다.
선행연구 고찰결과, 위치 정보를 기반으로 한 사고감지 기술은 실제 기술개발을 통해 현장에서 적용 및 평가를 수행하지 못하는 점에서 현장적용 가능성 및 성능평가가 이루어지지 않고 있는 점을 확인하였다. 기존 문헌에서는 실제 무선 통신을 통한 알고리즘 평가가 아닌 모의실험 환경에서의 평가를 수행하였다. 모의실험 환경에서의 알고리즘 평가 진행 시 통신지연, 정보 오차와 같은 점을 고려하지 못한다는 문제가 있었다. 또한, 기존 연구들은 점(point) 기반 위치 정보를 활용하는 방법을 채택하여 GPS 위치 정보의 오차 발생 시 대처가 어렵다는 점을 확인하였다.
모형 개발
1. 개발환경 설계
알고리즘 개발환경에는 점(Point) 기반 개발환경에서는 대형차량의 제원과 영향권의 TTC 산정에 한계가 존재한다. 다양한 사고 종류를 감지하는 과정에서 충돌 위치가 변화해 정확한 TTC 계산에 어려움이 존재한다. 이러한 한계를 극복하기 위해 본 연구에서는 단위 셀 환경에서의 사고위험 예측 알고리즘을 제안한다.
개발에 적용할 셀 크기 결정을 위해 요구사항을 (1) 교통조건, (2) 기하구조 조건, (3) 측위 제약을 고려한다. 교통조건으로는 대상이 되는 항만 내 이동장비 5종을 선정하여 제원 및 IoT 장치 설치 위치에 따른 발생 오차를 검토하였다. 기하구조 조건으로는 항만 내부 조사를 통해 항만 도로의 차로 폭 3.5m를 고려하였다. 측위 제약에는 GPS 오차 범위를 고려하였으며 본 논문에서 적용하는 실시간 이동측위(Real Time Kinematic, RTK) 방식의 ±0.1m를 고려하여 셀 크기를 선정하였다. 셀 크기는 0.5m 단위로 검토하였으며 요구사항별 셀 크기에 따른 조건 충족 여부를 점검하였다. Table 1은 점검 결과를 제시한다.
Table 1과 같이 알고리즘 개발에 적용할 셀 크기로 0.5m와 1.0m이 적정한 것으로 검토되었다. 이들 두 가지 크기 중 0.5m 크기는 시스템 개발의 무거움을 초래하며 1.0m 크기의 셀이 알고리즘 개발 시 계산과정이 용이하기 때문에 최적 셀 크기를 1.0m로 선택하였다.
Table 1.
Cell size
2. 알고리즘 개발
결정된 셀 크기를 기반으로 하는 사고감지 모형을 개발하였다. 알고리즘의 판단과정은 3단계 과정으로 분류하였다. Table 2는 알고리즘 판단과정을 제시한다.
Table 2.
Algorithm development order
| Case | Content | |
| 1 | Classification of accident | |
| 2 | Conflict detection by accident type | Rear-end collision |
| Crossing collision | ||
| 3 | Accident risk assessment | |
수집된 IoT 위치 정보를 활용하여 차량의 속도, 방향 정보를 통해 사고유형을 분류하였다. 사고유형은 추돌사고와 직각 충돌사고 두 가지로 분류하였다. 사고유형 분류는 차량의 방향을 통해 수행하였으며 동일 방향으로 진행하는 차량의 경우 추돌사고, 그 외 서로 다른 방향으로 진행하는 차량의 경우 직각 충돌사고로 분류하였다. 분류된 사고유형별 상충 감지 방식을 세분화하였다.
추돌사고는 IoT 장치가 부착된 셀의 위치와 차량의 제원을 고려하여 TTC를 산정하였다. 추돌사고의 TTC 계산은 현재 차량의 위치(,), (,)의 거리와 각 차량의 속도(,), 후방차량의 IoT 장치에서 전방까지의 거리()과 전방 차량의 IoT 장치에서 후방까지의 거리()를 고려하여 Equation 1과 같이 산정하였다.
직각 충돌사고의 경우 두 차량의 위치, 방향을 기반으로 예상 사고 발생지점(Conflict Cell)을 도출하였다. 도출된 예상 사고 발생지점을 차량의 제원을 고려하여 예상 사고 발생 영역(Conflict Area)으로 확장하였다. Figure 1은 예상 사고 발생지점과 예상 사고 발생영역의 산출 개요도를 제시한다.
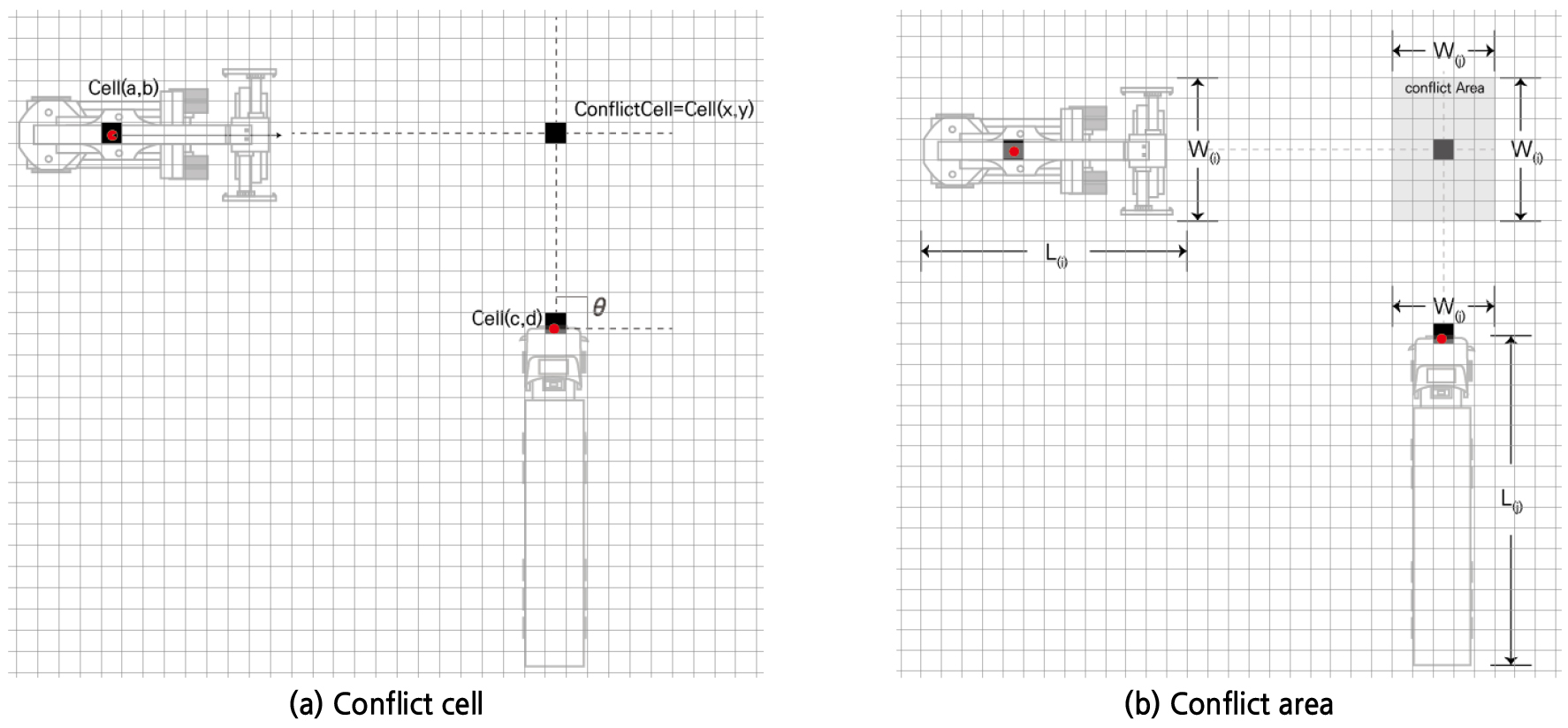
Figure 1의 (a)와 같이 각 차량의 위치 (,), (,)에서 이동 방향()을 토대로 예상 사고 발생지점 (,)을 차량의 이동 방향() 수평, 수직 이동할 때를 고려하여 Equation 2와 같이 산정하였다.
예상 사고 발생영역 설정 후 각 차량의 예상 점유시간을 통해 사고 발생 여부를 예측하였다. 예상 점유시간에는 차량의 길이()와 상대 차량의 너비()를 고려하여 진입시간 와 진출시간 를 Equation 3과 같이 계산하였다.
여기서, 는 차량의 IoT 장치와 예상 사고 발생지점까지의 거리, 는 IoT 장치로부터 차량 전방까지의 거리, 는 IoT 장치로부터 차량 후방까지의 거리, 는 차량의 속도(m/s), 는 차량의 너비이다. 계산된 각 차량의 점유시간을 토대로 Figure 2와 같이 차량의 충돌 가능성을 판별하였다. 차량의 충돌 가능성이 존재할 때, 최초 동시 점유시간으로 TTC 값으로 산정하여 계산하였다.
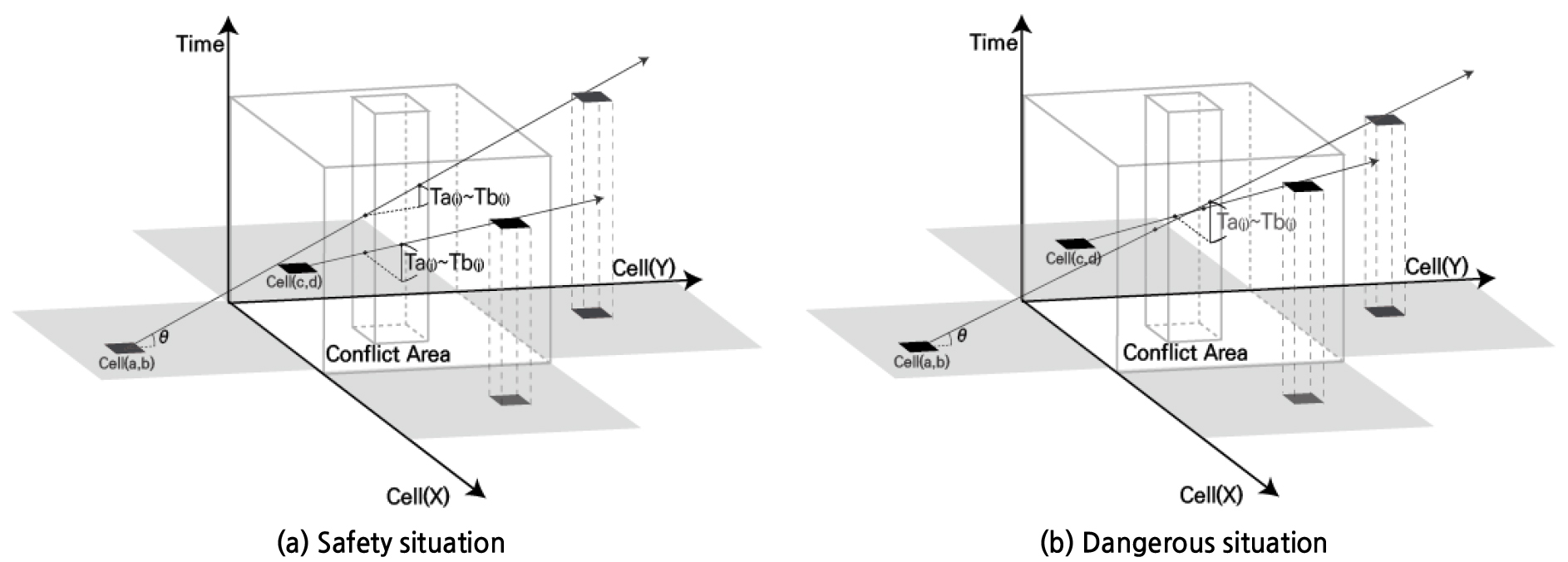
Figure 2는 각 차량의 점유시간을 3차원 공간을 통해 비교한 것이다. 수직축은 시간이며, 수평축은 Cell X, Y를 나타낸다. (a)는 예상 사고 발생영역이 설정되었지만, 각 차량의 점유시간이 중복되지 않아 안전한 상황을 나타내며, (b)는 예상 사고 발생영역 내 점유시간이 중복되어 상충 가능성이 존재한 상황을 나타낸다.
상충 가능성이 존재하는 상황에서 차량의 위험도를 재난 및 안전관리 기본법 제38조 2항에 따라 관심, 주의, 경계, 심각 4단계로 구분하였다(Ministry of Government Legislation, 2020). 위험도에 따른 TTC는 각 2, 4, 6, 8초로 기존 문헌을 바탕으로 공학적 판단으로 설정하였다. Table 3은 경고 단계에 따른 위험도 및 TTC 기준을 나타낸다.
제안된 모형 평가
제안된 모형의 평가를 위해 (1) 모의실험 기반의 알고리즘 적용 전 ‧ 후의 상충횟수를 비교를 통한 안전성 평가와 (2) 실제 현장 환경에서의 알고리즘 현장 적용성 평가를 수행하였다.
1. 모의실험 평가
1) 모의실험 평가 방법
모의실험을 통한 평가에는 미시적 교통분석프로그램인 비씸(Verkehr In Stadten Simulation model, VISSIM)과 차량 경로 분석을 통한 상충 분석 프로그램인 대리안전평가모형(Surrogate Safety Assessment Model, SSAM)를 통해 알고리즘의 적용 전 ‧ 후의 상충횟수 비교를 통한 안전성 평가를 수행하였다. 알고리즘 구현을 위해 VB.NET 프로그래밍 언어를 활용한 VISSIM Com-Interface를 활용하였다.
알고리즘 평가를 위한 양방향 1차로 접근로 4개로 구성된 교차로를 설정하였다. 네트워크는 항만 도로와 유사하게 설정하기 위해 각 접근로의 차로를 공유차로로 설정하였다. 차량 교통량 조건은 실제 교통량 조사를 기반으로 총 세 가지 수준으로 설정(200, 300, 400vph)하였다. 상기 제시된 6가지 차종 중 3.3m의 폭과 12.0m의 길이를 갖는 야드 트럭으로 모의실험을 구성하여 평가를 수행하였다. Table 4는 설정된 시나리오를 제시한다.
Table 4.
Simulation scenarios
| Case | Traditional operations | Proposed model |
| Vehicle volume (veh/h) |
200 300 400 |
200 300 400 |
| Random seeds | 5 | 5 |
| Total | 15 (3×5) | 15 (3×5) |
제안된 모형에서는 상충 및 사고감지 후 차량 운전자에게 정보를 제공하는 모형으로 실제 정보를 받은 운전자의 행태를 제시하고 있지 않다. 알고리즘의 안전성 평가를 위해 제안된 모형에 의해 정보를 받은 차량이 보호 운행(감속)할 것으로 예상해 모의실험에 적요하였다. 항만 운전자 운전행태를 파악하기 어려워 일반차량 운전행태를 고려하여 감속 수준으로 -3m/s2을 적용하였다(Korea Transport Institute, 2003).
2) 모의실험 결과
제안된 모형을 통해 항만 컨테이너 야적장에서 잠재 사고위험 정보를 제공할 때의 안전성 분석을 위해 SSAM을 통한 상충횟수를 비교 분석하였다. Table 5는 모의실험 분석결과를 제시한다.
Table 5.
Simulation results
제안된 모형을 통한 위험정보 제공 시 평균 43.68%의 잠재 상충횟수가 감소한 것으로 나타났다. 추돌사고(Rear-end)에 대한 상충 위험 감소는 70% 수준으로 확인되었으며 충돌사고(Crossing)의 경우 상충 위험 감소율은 41.33%인 것으로 확인되었다. 이러한 상충 위험의 경우 실제 사고가 아닌 잠재적 상충 상황에 관한 결과로 교통사고 상황을 의미하지 않는다. 교통사고 상황의 경우 감소한 상충 상황에 대비해 격감할 것으로 해석할 수 있다.
2. 현장실험 평가
1) 현장실험 평가 방법
현장평가는 경기도 화성시의 자율주행차량시험 단지(K-City) 내 도심부 신호 교차로에서 수행하였다. 시나리오에 대한 반복 횟수 20회를 설정하여 수행하였으며, 시스템 내 로그 기록과 현장 장비의 알림을 통해 성공 여부를 판단하였다. 현장평가를 위해 유사 이동장비 활용 통한 실험을 설계하였다. 항만 내부 이동장비를 통한 평가에는 제약사항이 존재해 전동 킥보드에 IoT 장치를 부착해 위치정보를 수집하는 방식으로 현장평가를 수행하였다. IoT 장치를 통해 위경도 수집 후 이를 야드트럭의 제원으로 적용하여 현장평가를 진행하였다. 현장평가를 위한 IoT 장비에는 텔레메트리 방식의 통신방식과 RTK 방식의 측위 방법을 적용하여 0.2초의 정보수집단위와 ±0.1m의 오차범위를 갖는 정보수집장치를 통해 알고리즘 평가를 수행하였다.
현장평가를 위한 시나리오는 사고 발생 사례에 근거하여 시거 제약으로 인해 발생하는 충돌사고 시나리오를 설정하였다. 사고 발생 감지 시 이동부 및 서버에서 경고가 울리고 차량의 감속 ‧ 정지를 통해 사고감지가 해제되면 경고가 해제되는 수행절차를 Table 6과 같이 설정하였다.
Table 6.
Field evaluation scenarios
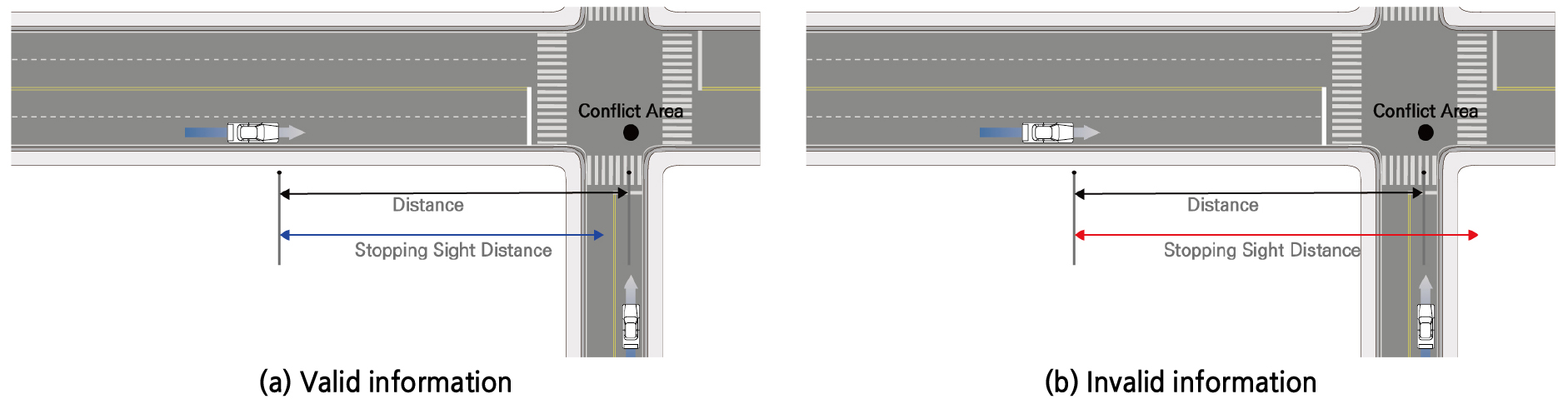
제안된 모형의 현장 적용성 평가를 위해 평가지표는 정보 제공했을 때 제공된 정보에 대한 유효성 지표를 설정하였다. 제공된 정보의 유효성은 정보제공 시점의 차량 위치(,)와 Equation 2에서 제시된 예상 사고 발생지점과의 거리(Conflict Distance)와 차량의 실시간 속도를 통해 계산된 정지시거(Stopping Distance)의 비교를 통해 지표 를 Equation 4와 같이 설정하였다.
Figure 3(a)와 같이 의 값이 0보다 클 때, 제공된 정보가 유효성이 있다고 판단하였고 Figure 3(b)와 같이 0보다 작을 때, 유효성이 없는 정보라고 판단하였다.
2) 현장평가 결과
설정된 평가지표를 바탕으로 각 이동장비에 대한 평가 결과를 분석하였다. 분석에는 센터 시스템 내 로그 기록을 활용하여 정보의 유효성 분석을 수행하였다. Figure 4는 전체 반복 횟수 중 값에 대한 분포도를 나타낸다.
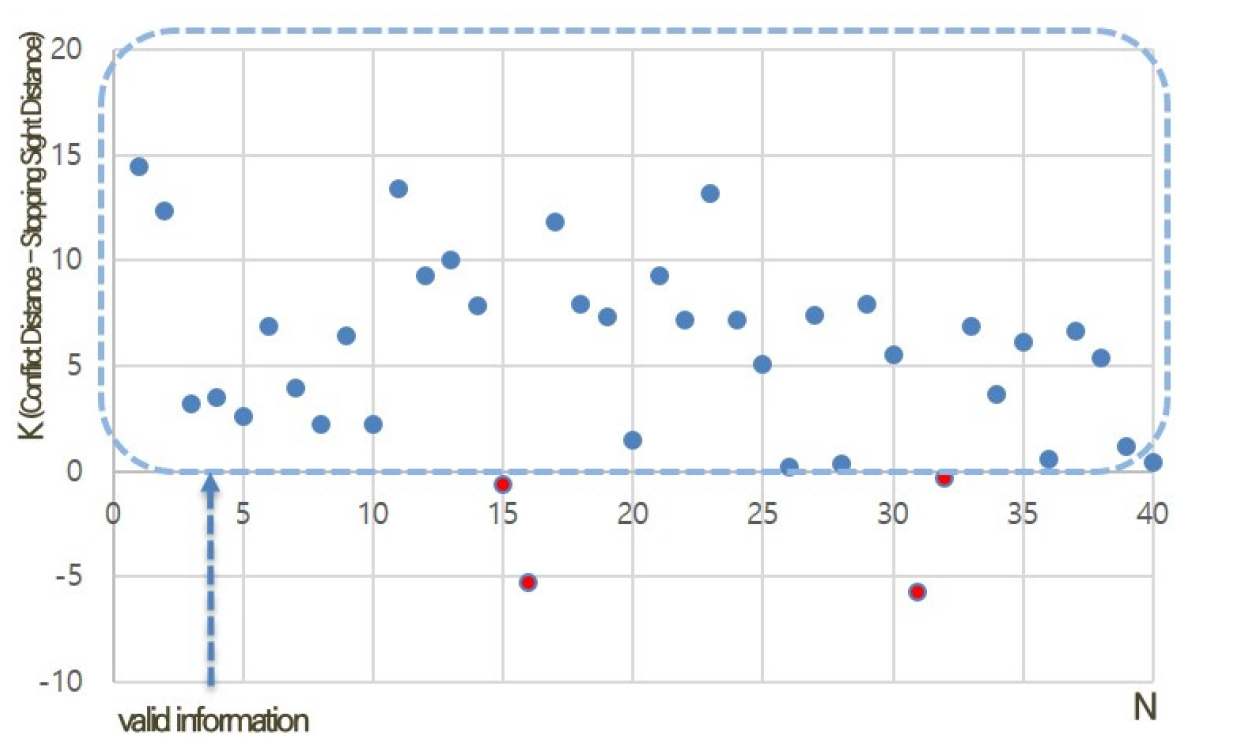
실험을 통한 정보 유효성 평가결과 20회 반복 횟수 중 차량 운전자에게 제공한 정보 40건에서 총 36건(90%)에 대해 유효한 정보를 제공한 것으로 나타났다. 차량은 정지시거보다 평균 5-10초 전에 정보제공을 받아 충분한 감속 ‧ 정지가 가능한 것으로 확인되었다.
결론
본 연구는 안전시거가 확보되지 않은 비신호 교차로에서 차량의 안전한 교차로 통행을 위한 방안을 개발에 목적으로 하였으며, IoT 기술을 통한 GPS 위치 정보를 수집하여 사고감지 및 정보제공 시스템을 개발하여 사후관리가 아닌 사전 안전관리기술의 현장적용 가능성을 확인하였다. 제안된 사고감지 및 정보제공 시스템 적용할 경우, 항만 혹은 공사장과 같은 차량의 안전시거 확보가 어려운 상황에서 안전시거 미확보로 인한 사고 예방을 통한 안전성 확보가 가능할 것으로 기대된다. 현장평가 결과 20회 중 18회에서 정지시거보다 5-10초 전 적절한 정보제공이 이루어졌다. 이는 IoT 기술을 활용한 정보수집 ‧ 제공장치를 통해 예상 사고 감지기술의 구현 및 현장적용 가능성을 확인하였다는 점에서 교통안전 측면에서 의미가 있다고 할 수 있다.
본 연구에서는 위험정보를 받은 운전자의 행태를 일괄적으로 -3m/s2 감속도로 설정하여 위와 같은 모의실험 결과가 도출되었다. 추후 정보제공 측면에서 운전자의 행태에 관한 추가적인 연구를 통해 상충 발생을 감소시킬 수 있을 것으로 생각된다. 또한, 본 연구에서는 위험도 평가의 경우 기존 문헌고찰을 통해 일반 차량의 특성이 반영된 TTC 기준을 적용하였다. 추후 연구를 통해 항만 야적장 내 운전자들의 운행특성을 반영한 위험도 평가를 수행할 필요성이 있다.
