

서론
관련문헌 고찰
1. 초고속주행 관련 연구
2. 고속도로 곡선부 주행안전성 연구
3. 고령 운전자 관련 연구
4. 본 연구의 의의
연구방법론
1. 분석범위
2. 실험 참가자 모집
3. 주행실험 및 주행자료 수집
4. 횡방향 주행안전성 평가지표 선정 및 산출
5. 분석절차
분석결과
1. 운전자 주행속도 분포 분석
2. 고령 운전자 대표 평가지표 선정
3. 주행안전성 취약구간 도출
고령 운전자 횡방향 주행안전성 취약구간 개선대책
결론
서론
자동차 개발 기술의 발전으로 주행 성능이 향상됨에 따라 고속도로를 더욱 신속하게 이용하고자 하는 이용자의 욕구가 증대되고 있다(Ministry of Land, Infrastructure and Transport, 2016a). 현재 국내에서 운영중인 고속도로의 최고 제한속도는 110km/h로 향후 자동차 주행 성능의 향상을 고려한다면 고속도로 제한속도를 상향하여 운영할 필요성이 있다. Ministry of Land, Infrastructure and Transport(2020)는 도로가 갖춰야할 최소한의 시설 기준을 제시하고 있으나 최대 설계속도가 120km/h에 불과하므로 제한속도 상향 시의 주행안전성에 대하여 평가할 필요가 있다. 직선부 주행 시 운전자는 가속 페달, 브레이크 페달을 주로 조절하나 곡선부 주행 시에는 가속 및 브레이크 페달 조절에 더불어 차량 제어를 위한 높은 수준의 핸들 조작이 요구되므로 직선부보다 곡선부를 주행하는 운전자에게 더 많은 작업부하가 부담될 것이다. 일반적으로 고령 운전자의 경우, 주변 차량과의 상호작용으로 발생한 위험상황에 대한 대처능력과 도로 ‧ 교통시설에 대한 인지 ‧ 반응 능력이 비고령 운전자보다 저하되므로 급제동 시 제동을 위해 필요한 거리가 증가한다는 특성이 있다(Ministry of Land, Infrastructure and Transport, 2014). 또한 최근 10년간(2010-2019년) 고령 운전자의 사고건수는 증가추세를 나타내고 있으며, 2019년도 고령운전자 사고건수는 전년대비 10.8%가 증가하였다(KoROAD, 2020). 신체적 능력이 저하된 고령 운전자의 주행안전성이 비고령 운전자보다 취약할 수 있으므로 고속도로를 이용하는 다양한 연령대의 운전자 중 고령 운전자의 주행안전성에 대한 분석이 중요하다. 따라서 초고속주행 환경에서 고령 운전자의 횡방향 주행안전성을 사전에 평가하고 개선방안을 마련할 필요성이 있다.
본 연구의 목적은 초고속주행 환경에서 고령 운전자의 주행안전성을 나타낼 수 있는 대표 평가지표를 선정하고 선정된 대표 평가지표로부터 주행안전성 취약구간을 도출하는 것이다. 본 연구의 분석 범위는 설계속도 140km/h로 설계된 서울-세종 고속도로의 안성-용인 구간이다. 해당 구간은 아직 공용전 도로이므로 도로주행 시뮬레이터를 활용하여 모의주행 실험을 통해 분석자료를 수집하였다. 횡방향 주행안전성에 대해 연구한 관련문헌을 참고하여 5개의 횡방향 주행안전성 평가지표를 선정하고 정규성 검정, ANOVA분석, 비모수검정 및 사후분석을 통해 5개의 지표 중 고령 운전자의 주행안전성을 나타낼 수 있는 대표 평가지표를 선정하였다. 고령 운전자의 주행안전성 취약구간을 도출하기 위해서 평면곡선 반지름과 종단경사에 따라 구분된 설계구간별로 대표 평가지표를 집계하여 최대값부터 상위 5개의 구간을 주행안전성 취약구간으로 도출하였다. 또한 분석구간 이정에 따라 대표 평가지표와 도로선형 특성의 프로파일을 나타내어 취약구간의 특성을 분석하고 고령 운전자 주행안전성 취약구간에 대한 개선대책을 제시하였다.
본 연구의 구성은 다음과 같다. 2장에서는 초고속주행, 곡선부 횡방향 주행안전성, 고령 운전자에 대한 관련문헌을 고찰한다. 3장에서는 연구방법론을 제시하였으며 설계구간 범례 구분, 실험 참가자 모집, 주행실험, 평가지표 선정 및 산출 방법을 설명한다. 4장에서는 분석자료 수집 후 대표 평가지표를 선정하고 주행안전성 취약구간을 도출하였으며 5장에서는 고령 운전자 주행안전성 취약구간에 대한 개선대책 방안을 제시하였다. 마지막으로 6장에서는 본 연구의 결론과 한계점 및 향후연구 방안에 대하여 서술하였다.
관련문헌 고찰
고령 운전자의 곡선부 초고속주행 시 주행안전성에 대한 필요성을 제시하기 위하여 초고속주행, 고속도로 곡선부, 고령 운전자에 대한 관련문헌을 고찰하였다.
1. 초고속주행 관련 연구
자동차 기술의 발전으로 차량의 고속주행이 가능하고 고속주행을 하고자 하는 이용자의 욕구가 증가하고 있으나 국내 도로기술은 설계속도 120km/h 수준이므로 고속도로 설계속도(140km/h) 상향에 따른 고속도로 설계 연구가 필요하다(Ministry of Land, Infrastructure and Transport, 2016a). Kim et al.(2008)은 설계속도 160km/h 상향에 따른 차량 거동의 변화를 이론적으로 검토하였으며 초고속주행 시 측풍으로 인한 횡압력이 증가해 전방으로 주행하는 차량이 횡방향으로 거동하게 되며 이에 따라 차로폭 확폭의 필요성이 있다고 하였다. An et al.(2008)은 초고속주행(160km/h) 환경에서 사고를 유발할 수 있는 사건 혹은 상황이 발생하였을 때의 파급효과와 위험도가 현재의 고속도로보다 증가할 것으로 예상되므로 초고속주행 시의 안전성을 분석할 필요가 있다고 하였다. 의무적인 제한속도가 없는 독일의 아우토반의 경우 교통량이 증가함에 따라 사고 빈도가 증가할 수 있으므로 사고발생 요인과 사고발생률에 대한 영향을 분석하였으며 사고 빈도에 영향을 미치는 주요 변수는 일평균 교통량이고 평면곡선 반지름도 사고 빈도에 영향을 미치는 것으로 나타났다(Garnowski and Manner, 2011). 장래의 제한속도 상향에 대비하여 초고속주행 시의 교통안전성 측면에 대한 연구가 필요하다.
2. 고속도로 곡선부 주행안전성 연구
고속도로 곡선부의 주행안전성에 대하여 분석한 연구를 고찰하였다. Findley et al.(2012)은 고속도로 곡선부 주행 시 차량에 원심력이 가해지고 운전자에게 어려운 주행 능력이 요구되므로 운전자 측면에서 위험한 구간이라고 하였다. 고속도로에서 발생하는 교통사고 중 비교적 높은 비율의 사고가 평면곡선부에서 발생하고 특히 평면곡선 반지름이 저규격인 구간에서 종단경사가 내리막 경사인 경우에 운전자의 차량 제어 능력이 저조한 것으로 나타났다(Eftekharzadeh and Khodabakhshi, 2014). 평면곡선 반지름이 주행안전성에 미치는 영향 혹은 상관관계 등에 연구한 문헌을 고찰하였다. Jeong et al.(2017)은 평면곡선 반지름이 주행 성능에 미치는 영향을 분석하였으며 분석 결과는 평면곡선 반지름이 평균 주행속도와 차로 유지 성능에 영향을 미치는 것으로 나타났다. 평면곡선 반지름과 종단경사가 복합적으로 적용된 곡선부에 대하여 사고 심각도 등급별 충격파에 대한 예측 모형을 분석한 연구에서는 평면곡선 반지름이 감소함에 따라 사고 빈도가 증가하는 것으로 나타났다(Bauer et al., 2013). 평면곡선 반지름이 증가함에 따라 사고 빈도가 감소하는 음의 상관관계가 나타나고 평면곡선 반지름이 고규격일수록 평면곡선 반지름 증가에 따른 사고 빈도 감소 추세가 완만하게 나타났다(Gooch et al., 2016; Xin et al., 2017). 고속도로 곡선부의 주행안전성에 대하여 연구한 관련 문헌을 고찰한 결과, 곡선부 주행 시 차량에 가해지는 원심력과 운전자에게 요구되는 주행 능력으로 인해 고속도로 곡선부에서 운전자의 주행안전성이 비교적 저하되고 평면곡선 반지름이 곡선부 주행안전성에 영향을 미치는 요소인 것으로 나타났다.
3. 고령 운전자 관련 연구
고령 운전자는 시력 저하 및 시야 축소와 같은 신체적 노화로 인해 비고령 운전자보다 급제동 시 제동거리가 증가하거나 인지・판단 동작의 정확성이 저하하는 등 신체적 정신적 능력이 저조하다(Ministry of Land, Infrastructure and Transport, 2014). 인지 능력의 저하는 사고 위험성에 영향을 미치는 주요 변수이고 운전자가 안전운전을 수행하기 위해서는 운전자 스스로의 자율규제 능력이 필요하나 인지 능력이 저조한 고령 운전자의 경우 자율규제가 이루어지지 않을 수 있다(Gaines et al., 2011; Wong et al., 2012). 시력 저하, 시야 축소와 같은 고령 운전자의 시각적 능력의 노화로 인해 교통사고 위험성이 증가한다(David and Prateek, 2020). 기존 문헌에서의 고령 운전자의 고속도로 교통사고 특성을 고찰한 결과 고령 운전자는 타 연령대에 비하여 사고율이 높고 사망 및 부상사고 비율 중 최대 비율인 것으로 나타났고 직선부 대비 곡선부에서 발생한 교통사고의 사고 심각도가 높은 것으로 나타났다(Rakotonirainy et al., 2012; Khattak et al., 2002). 고령 운전자는 심각도 등급이 높은 사고의 발생 비율이 높아 고령 운전자의 주행안전성 개선은 사고 심각도를 감소시키는데 영향을 미칠 것이므로 고령 운전자의 주행안전성에 대한 연구의 필요성이 있다(Koppel et al., 2011).
4. 본 연구의 의의
초고속주행 환경에서는 사고 발생 시 치사율과 같은 심각도가 제한속도 110km/h 혹은 120km/h인 고속도로보다 증가할 수 있으므로 운전자의 행태를 이해하고 안전성 향상을 위한 대안 마련을 위한 다양한 연구가 필요하다. 특히 곡선부 주행은 차량에 원심력이 가해지고 직선부에 비하여 차량 제어를 위한 추가적인 핸들 조절 작업부하가 요구된다. 고령 운전자의 경우 비고령 운전자보다 신속한 상황 판단을 위한 인지 ‧ 반응 능력이 떨어지므로 타 연령대와 비교하였을 때 동일한 교통 환경을 주행하더라도 비교적 불안전한 횡방향 주행행태가 나타날 수 있다. 따라서 본 연구의 의의는 국내 최초의 초대형 시뮬레이터를 이용하여 고령 운전자가 포함된 대규모 인원 대상의 주행 실험을 수행하고 수집된 분석자료를 이용하여 초고속주행 시 곡선부에서의 횡방향 주행안전성을 연구한 것이다.
연구방법론
본 연구의 단계별 분석방법을 제시한 연구흐름도를 Figure 1에 제시하였다. Step 1은 주행자료를 수집하기 위한 분석범위, 실험 참가자 모집 인원, 주행 방법 및 시나리오를 제시하였다. Step 2는 각 연령층 간의 통계분석을 통해 고령 운전자의 주행안전성을 나타낼 수 있는 대표 평가지표를 선정하였다. Step 3에서는 선정된 대표 평가지표를 통해 분석범위 내의 주행안전성 취약구간을 도출하고 취약구간의 특성을 분석하였다. Step 4는 고령 운전자의 주행안전성 취약구간을 개선하기 위한 대책방안을 제시하였다.
1. 분석범위
서울-세종 고속도로 내 안성-용인 구간은 장래 도로 인프라 기술의 발전과 차량 성능의 향상 시 제한속도 상향이 가능한 설계제원 적용구간으로 선정되었으며 설계속도 140km/h에서도 안전한 기하구조 설계기준을 적용하였다(Korea Expressway Corporation, 2020). 안성-용인 구간의 연장은 32km이고 구간 내에 다양한 도로선형이 존재한다. 도로선형에 따른 설계구간을 구분하기 위해 평면곡선 반지름과 종단경사 범례를 설정하였다. Ministry of Land, Infrastructure and Transport(2015)는 평면곡선 반지름 3,000m를 기준으로 운전자 주행행태가 상이하게 나타난다고 하였다. 3,000m를 평면곡선 반지름 범례의 구분 기준으로 설정하여 3개의 범례를 구분하였고 종단경사는 내리막, 오르막, 오목, 볼록으로 구분하여 4개의 범례로 구분하였으며 설계구간 범례 구분을 Table 1에 나타냈다.
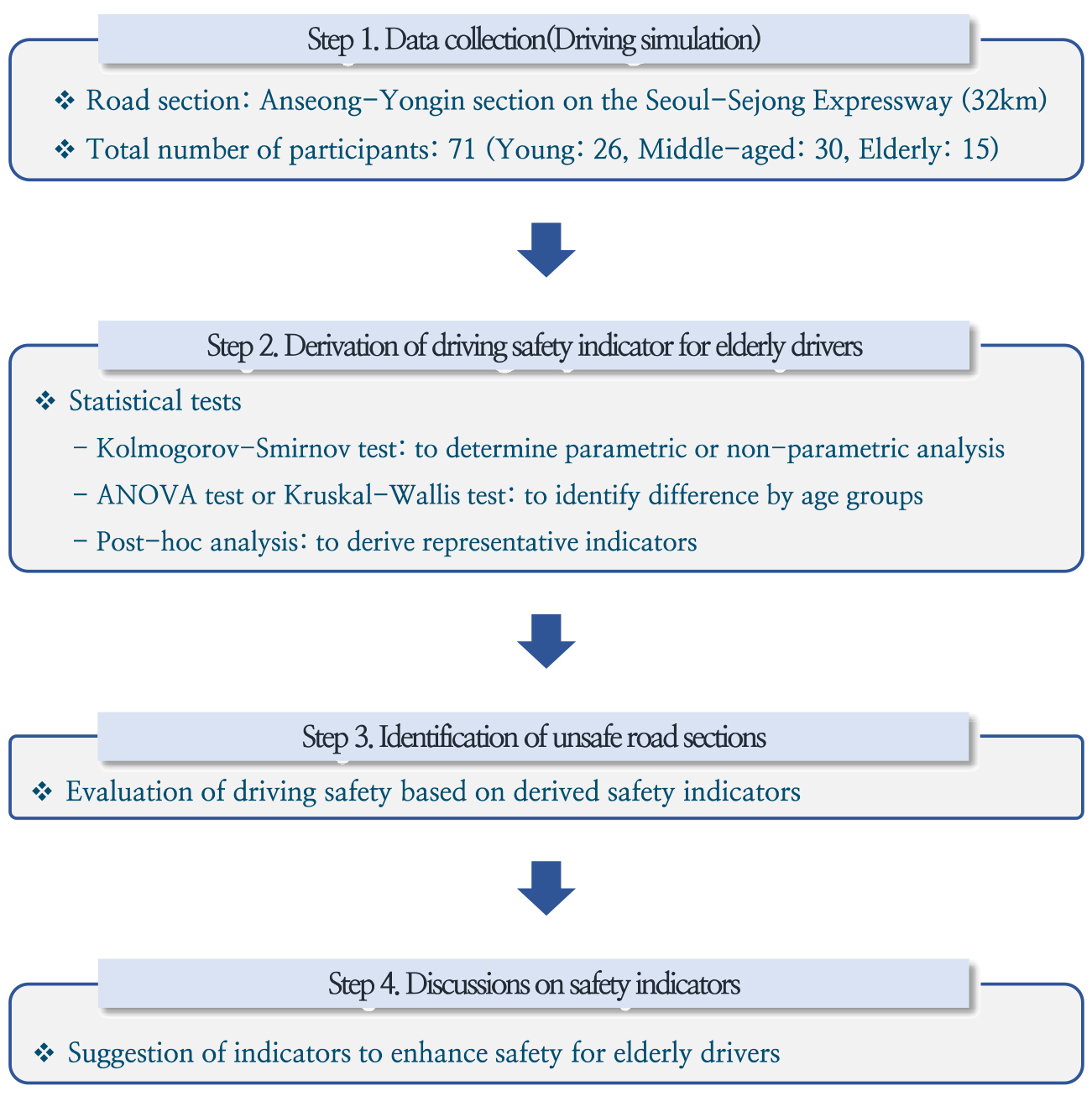
Table 1.
Class of road alignment
| Curve radius | Grade | ||
| Class | Details | Class | Details |
| A | 3,500m≤R<4,000m | 1 | Downhill |
| 2 | Uphill | ||
| B | 3,000m≤R<3,500m | ||
| 3 | Concave | ||
| C | R<3,000m | ||
| 4 | Convex | ||
2. 실험 참가자 모집
실험 참가자는 연령이 만 20세 이상이고 운전경력이 1년 이상인 운전면허 소유자를 대상으로 모집하였으며 시간적 ‧ 비용적 조건 내에서 연령 및 성별을 고려하여 실험 참가자 인원을 구성하여 Table 2에 제시하였다. 실험 참가자는 총 71명을 모집하였으며 연령에 따라 청년층, 중장년층, 고령층으로 운전자 그룹을 구분하여 각 그룹별 연령 분포와 인원을 Table 3에 나타냈다. 고령 운전자 사고는 가해자 연령이 만 65세 이상인 사고를 의미하므로 이를 차용하여 본 연구에서도 고령층 기준을 만 65세 이상으로 설정하였다(KoROAD, 2020). 2018년의 고령자의 운전면허 소지자 비율은 9.63%이고 2014-2018년(5년) 동안의 고령 운전자의 면허소지자 증가율은 약 2.5%이다(TAAS). 이러한 증가추세를 고려하여 고령 운전자의 면허소지자 비율은 향후 10년 뒤 약 10%가 증가한 15%에 도달할 것으로 예측된다. 따라서 본 연구에서의 고령 운전자 비율은 71명의 15%인 11명을 산정하였다. 실험 중 시뮬레이터 부적응 등으로 인한 실험 중도 포기자가 발생하는 것을 대비하기 위하여 최종 고령 운전자 모집 인원은 15명으로 산정하였다.
Table 2.
Characteristics of participants
| 20s | 30s | 40s | 50s | 60s | Total | ||||||
| 20-24 | 25-29 | 30-34 | 35-39 | 40-44 | 45-49 | 50-54 | 55-59 | 60-64 | 65- | ||
| Male | 2 | 4 | 3 | 4 | 4 | 4 | 3 | 3 | 0 | 8 | 35 |
| Female | 2 | 4 | 3 | 4 | 4 | 3 | 4 | 4 | 1 | 7 | 36 |
| Total | 4 | 8 | 6 | 8 | 8 | 7 | 7 | 7 | 1 | 15 | 71 |
Table 3.
Classification of age groups
| Group | Distribution of age | Number of people |
| Young | 20-39 | 26 |
| Middle-aged | 40-63 | 30 |
| Elderly | 65-73 | 15 |
3. 주행실험 및 주행자료 수집
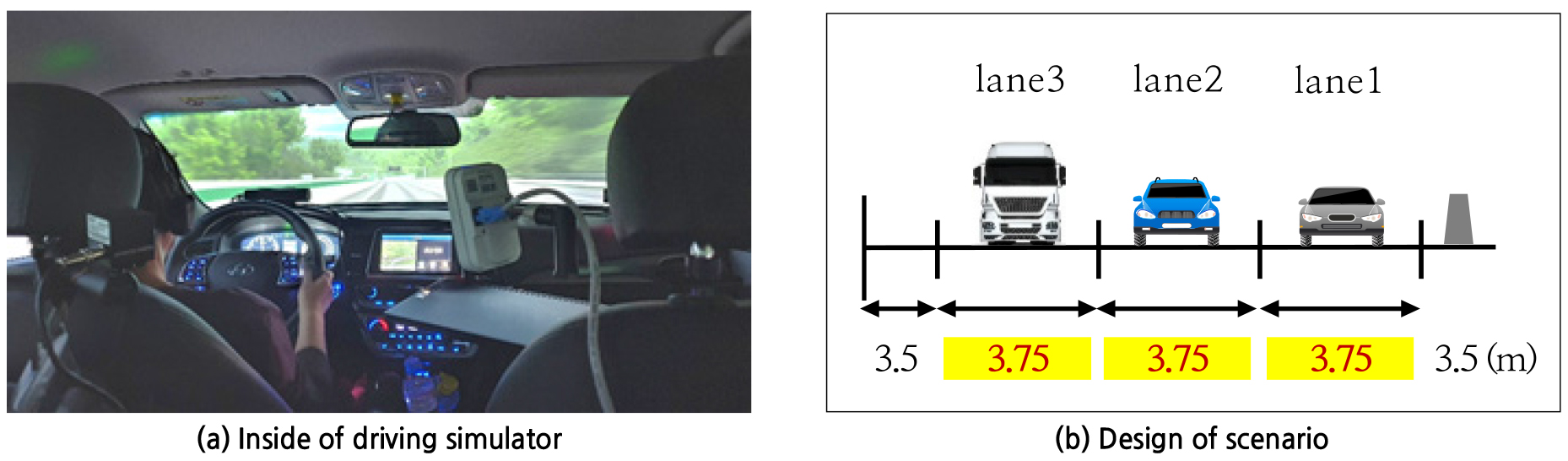
본 연구의 분석범위는 공용전의 고속도로이므로 실제 주행이 불가하고 실제 주행이 가능하더라도 불가피한 사고가 발생할 수 있는 안전상의 문제가 있다. 또한 기상상황과 같이 주행환경에 영향을 미칠 수 있는 요소를 차단하기 위하여 시뮬레이터를 이용하였다. 본 연구의 주행실험은 Figure 2에 나타낸 한국도로공사의 초대형 도로주행 시뮬레이터를 이용하였으며 2020년 6월 15일-7월 4일, 2020년 8월 18일-8월 29일 두 차례에 걸쳐 모의주행 실험을 진행하였다.

한국도로공사 도로주행 시뮬레이터는 국내 최대 규모와 최고 성능의 도로주행 시뮬레이터 시설로 Robert Bosch 사의 부품으로 운동 시스템이 구축되었으며, AVSimulation 사의 SCANeRTM Studio 소프트웨어로 시스템을 운영한다. 시뮬레이터 장비는 크게 운동시스템, 영상시스템, 음향시스템, 승용차캐빈으로 구성되어 있으며 각 시스템의 구성 및 특징은 다음과 같다. 먼저 운동 시스템은 X(20m)-Y(7m)레일, 6방향 모션축, 360도 회전 테이블(Yaw), 20Hz 진동 서스펜션으로 구성되있다. X(20m)-Y(7m)레일은 리니어모터 방식으로 0.7g 중력가속도 까지 순간 움직임이 가능하며, 6방향 모션축은 횡방향/종방향 구배를 자연스럽게 구현 가능하다. 360도 회전 테이블은 급커브구간 주행시 원심가속도를 만들어내며, 20Hz의 서스펜션은 도로노면 상태에 따른 진동을 구현한다. 영상 시스템은 고해상도(QXGA급) 시뮬레이터 전용 프로젝트 6개가 360도로 구축되어 운전자가 주변환경 영상정보를 전방뿐만 아니라, 주변창, 룸미러/사이드미러로 봤을 때 실제 주행환경에 있는 것처럼 느낄 수 있도록 현실감 높게 재현해준다. 음향시스템은 차량 내외부에 8채널로 구성되어 시동음, 엔진음, 노면마찰소리, 바람소리 등 차량 주행시 발생되는 음향을 실시간으로 생성해준다. 마지막으로 캐빈시스템은 차량조작 입력을 현실적으로 구현하기 위해 중형세단 실차 캐빈으로 구축하였다. 실차 캐빈내 조향, 페달, 방향지시등, 라디오, 공조시설 등 조작 입력이 가능하여 운전자가 실제 차량에 탑승한 것처럼 느낄 수 있으며 실차 캐빈에 대한 사진을 Figure 3(a)에 제시하였다. 가상 주행환경 재현성이 매우 높아 피실험자가 실제 주행을 하는 것과 같이 느낄 수 있기 때문에, 실험을 통해 수집된 피실험자 모의주행 실험 데이터의 신뢰성을 제고할 수 있을 것으로 판단된다.
Ministry of Land, Infrastructure and Transport(2016a)는 설계속도 140km/h 기준의 설계제원으로 주행차로의 차로폭은 3.75m이고 중앙분리대 폭과 우측 길어깨폭은 3.5m를 제시하였으며 이를 Figure 3(b)에 나타냈다. 3차로는 화물차 지정차로이기 때문에 제한속도가 90km/h 수준으로 140km/h 주행이 불가하므로 1차로를 주행차로로 설정하였다. 주변 교통량 배치 시 주변 차량의 영향으로 인해 운전자가 주행속도 140km/h까지 충분히 도달하지 못할 수 있으므로 주변 차량에 의한 영향을 배제하고 평면선형에 따른 설계구간별 주행안전성을 평가하기 위해 교통량을 배치하지 않았다. 주행 네트워크 구축 시 가상주행과 현실과의 이질감을 최소화하기 위해 도로이정표지, 교통안전표지, 교량, 터널 등의 도로 부속 시설물을 배치하고 수목을 포함한 주변 지형을 구현하였다. 그리고 강우, 강설이 없는 맑은 날의 주간 상황을 주행환경으로 설정하였다.
실험절차는 주행 전 설문조사, 사전 안내 및 안전 교육, 연습 주행, 본 주행 실험 순으로 진행하였다. 주행 전 설문조사는 운전자의 사회인구학적 특성을 조사하기 위해 연령, 성별, 연소득 등과 같은 설문을 수행하였다. 사전 안내 및 안전교육에서는 실험에 소요되는 시간을 사전에 공지하고 시뮬레이터 기기 조작방법, 주행방법 및 안전교육을 진행하였다. 모의주행에 대한 부적응을 최소화하기 위해 실험 참가자 당 최소 5분 이상의 연습주행을 수행하여 실험 참가자의 시뮬레이터에 대한 적응 수준을 향상시켰다. 주행 시나리오 시작 시 실험 참가자에게 안내방송을 통해 제한속도 정보를 제공하였으며 실험 참가자 당 총 주행시간은 약 20분이 소요되었다.
4. 횡방향 주행안전성 평가지표 선정 및 산출
횡방향 주행안전성을 평가하기 위해 관련 문헌에서 사용한 평가지표를 검토하여 본 연구에서의 횡방향 주행안전성 평가지표를 선정하였다. Liu et al.(2016)은 주행행태에 대한 차로폭, 길어깨폭의 영향을 분석하기 위한 지표로 Lane position 표준편차를 사용하였다. Chang et al.(2001)은 곡선부의 평면곡선 반지름에 따른 운전자의 시각행태에 대해 연구하였으며 곡선부를 주행하는 차량의 차선이탈률(차량이탈수/차량수)을 사용하여 안전성을 분석하였다. Wang et al.(2015)은 고속도로에서 평면곡선 반지름과 종단경사가 동시에 존재하는 복합선형 구간이 안전성에 미치는 영향 분석을 위해 횡방향 가속도 표준편차를 평가지표로 사용하였으며 횡방향 가속도가 평면곡선 반지름과 차량의 주행속도에 영향을 받는 지표라고 하였다. Choudhari and Maji(2019)는 평면곡선부에서 운전자의 사회인구학적 특성과 운전경험에 대한 요인이 차로이탈 위험성에 미치는 영향을 분석하였고 평가지표로 등가임계 횡방향 가속도()를 사용하였다. Jo et al.(2006)은 Yaw 각속도 제어를 통해 횡방향 및 롤방향 안전성이 향상됨을 확인하였다. 관련 문헌을 통해 선정한 5개의 평가지표인 Lane position 표준편차, 차로이탈횟수, 횡방향 가속도 표준편차, 등가임계 횡방향 가속도, 각속도에 대한 설명은 Table 4에 나타냈다. 관련 문헌에서 평가지표를 참고하였으나 본 연구에서의 연구범위에 따라 평가지표 산출 방법을 응용할 필요가 있다. 차로이탈횟수의 경우 도로선형에 따라 구분한 설계구간별 차로이탈횟수를 산출할 수 있으나 본 연구에서는 설계구간별 길이가 모두 다르기 때문에 차로이탈횟수를 설계구간의 길이로 나누어 차로이탈률을 평가지표로 사용하였다. 또한 각속도의 경우 차량의 급선회 정도를 알 수 있으나 차량의 주행속도를 반영하고 있지 않고 동일한 각속도 값이더라도 차량의 주행속도에 따라 안전성이 다르게 해석되어야 하므로 본 연구에서는 각속도에 주행속도를 곱한 RMPSS(Rad meter per second square)를 평가지표로 사용하였다. 모든 평가지표는 산출 값이 증가할수록 횡방향 주행안전성이 저하하는 것을 의미한다.
Table 4.
Measurements for lateral driving safety
| Existing studies | Measurements | Descriptions | Measurement of this study |
| Liu et al. (2016) |
Standard deviation of lane position |
Variable values from the center of the lane | - |
| Chang et al. (2001) |
Rate of run-off the lane |
(Number of run-off the lane / Number of vehicle) |
(Number of run-off the lane / Length of section) |
| Wang et al. (2015) |
Standard deviation of lateral acceleration |
Acceleration variation values in both directions of the vehicle | - |
| Choudhari and Maji (2019) |
Equivalent ciritical lateral acceleration |
Area exceeding ciritcal lateral acceleration | - |
| Jo et al. (2006) | Yaw rate |
The rate at which the angle of yaw angle changes around the verical line | RMPSS (=Yaw rate×Speed) |
수집된 주행 데이터를 검토한 결과, 차로를 완전히 벗어난 실험 참가자는 존재하지 않았으며 이상치로 판단할 수 있는 데이터가 나타나지 않았으므로 이상치 제거 과정은 별도로 수행하지 않았다. 본 연구에서는 분석범위인 32km를 5m씩 보간하여 운전자 당 6,400개의 데이터를 도출하였으며 도로선형 특성에 따라 설계구간을 구분하였으므로 각 운전자별, 설계구간별로 평가지표 산출 값을 도출하였다. Lane position은 차로 중심으로부터 차량 중심까지의 거리(m)를 의미한다. Lane position 표준편차는 차로 중심으로부터 차량의 위치 변동값을 의미하며 수식은 Equation 1에 제시하였다. 는 71명의 각 운전자를 나타내고 은 46개의 각 설계구간을 나타낸다. 는 각 설계구간의 연장이고 은 설계구간 내에서의 차량의 위치를 나타내고 32km를 5m씩 보간하였으므로 의 값은 0m부터 5m씩 증가한다. 은 운전자 의 설계구간 에서 차량 위치 일 때의 Lane position을 의미하고 은 운전자 의 설계구간 에서의 Lane position 평균을 의미한다.
where, : Std.deviation of lane position for driving , section (m)
: Driver ID
: Section ID
: Length of section (m)
: Vehicle position in section (=0, 5, 10, 15m…)
: Lane position for driver , section , vehicle position (m)
: Mean of lane position for driver , section (m)
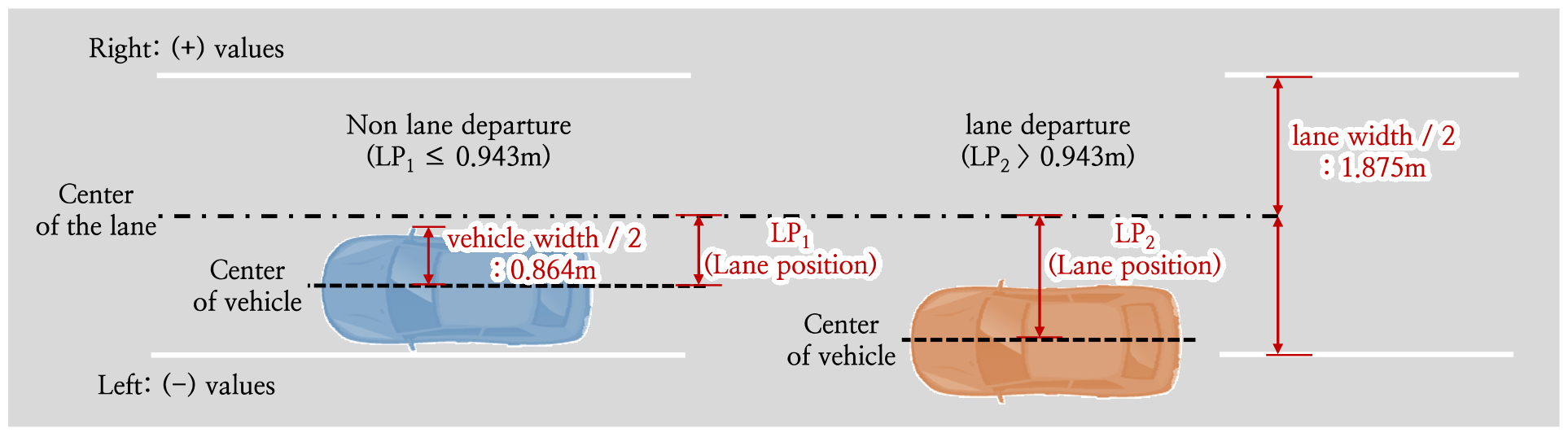
도로선형 특성에 따라 설계구간을 구분하였으므로 평가지표를 각 운전자별, 설계구간별로 산출하였다. 차로이탈률을 산출하기 위해 차로이탈 판단기준을 정의하였고 이를 수식 Equation 2에 나타냈다. 본 연구에서는 차량폭의 끝과 주행차로의 차선이 일치한 경우가 차로이탈 직전 상태로 판단하고 이 때의 Lane position 값이 차로이탈 판단 기준 값으로 정의하였다. 차량폭의 좌측 끝이 주행차로의 좌측 차선과 일치하는 경우를 기준으로 Lane position이 차로이탈 판단기준값을 초과한다면 차로이탈로 판단하고 기준값 이하라면 차로이탈로 판단하지 않으며 이를 Figure 4에 나타냈다. 차로이탈 직전 상태인 경우에 차로폭의 절반인 1.875m에서 차량폭의 절반인 0.864m를 제한 0.943m가 차로이탈 판단기준이 되는 Lane position 값으로 정의하였다. 차로이탈 판단 여부에 대한 수식은 Equation 3에 나타냈으며 차로이탈 판단기준에 따른 운전자 의 설계구간 에서의 차로이탈횟수는 Equation 4에 나타냈다.
where, : Width of vehicle(m)
: Width of the lane(m)
: Run-off the lane whether for driver , section , vehicle position
: Number of run-off the lane for driver , section
운전자 의 설계구간 에서 차로이탈률은 설계구간 에서의 차로이탈횟수를 설계구간별 연장으로 나눈 것으로 수식은 Equation 5에 제시하였다.
where, : Rate of run-off the lane for driver , section
: Length of section
횡방향 가속도는 시뮬레이터로부터 수집되는 원시 자료에서 수집하는 것이 가능하고 횡방향 가속도 표준편차는 주행차량의 양측 방향으로의 가속도 변동값을 의미하며 수식은 Equation 6에 나타냈다.
where, : Std.deviation of lateral acceleration for driver , section
: Lateral acceleration for drvier , section , vehicle position
: Mean of lateral acceleration for driver , section , vehicle position
등가임계 횡방향 가속도는 임계 횡방향 가속도를 초과하는 면적으로 곡선부 주행 시의 횡방향 주행안전성을 나타내는 평가지표이다(Choudhari and Maji, 2019). 등가임계 횡방향 가속도에 대한 수식은 Equation 7에 제시하였다. Equation 8은 임계 횡방향 가속도로 곡선부의 편경사와 횡방향 미끄럼 마찰계수 및 중력가속도를 이용하여 산출하고 Equation 9는 임계 횡방향 가속도 초과 여부를 나타낸 수식이다.
where, : Equivalent area of lateral acceleration above threshold for driver , section (m/s2)
: Curve length above threshold for section (m)
: Lateral acceleration of curve above threshold(m/s2)
: Treshold lateral accelearation(m/s2)
: Width of curve above threshold(5m)
: Above threshold whther for curve
: Superelevation
: Lateral slip friction coefficient
: Acceleration of gravity
횡방향 주행안전도를 의미하는 RMPSS는 각속도(Yaw rate)에 주행속도를 곱한 값으로 본 연구에서 자체적으로 정의한 평가지표로 수식은 Equation 10에 제시하였다. RMPSS는 운전자 가 설계속도 에서 차량 위치 일 때의 각속도에 주행속도를 곱한 값으로 산출 값이 증가할수록 급진로변경을 의미하므로 주행안전성의 저하를 의미한다.
where, : Lateral driving safety for driver , section (Rad×m/s2)
: Yaw rate for driver , section , vehicle position (Rad/s)
: Driving speed for driver , section , vehicle position (m/s)
5. 분석절차
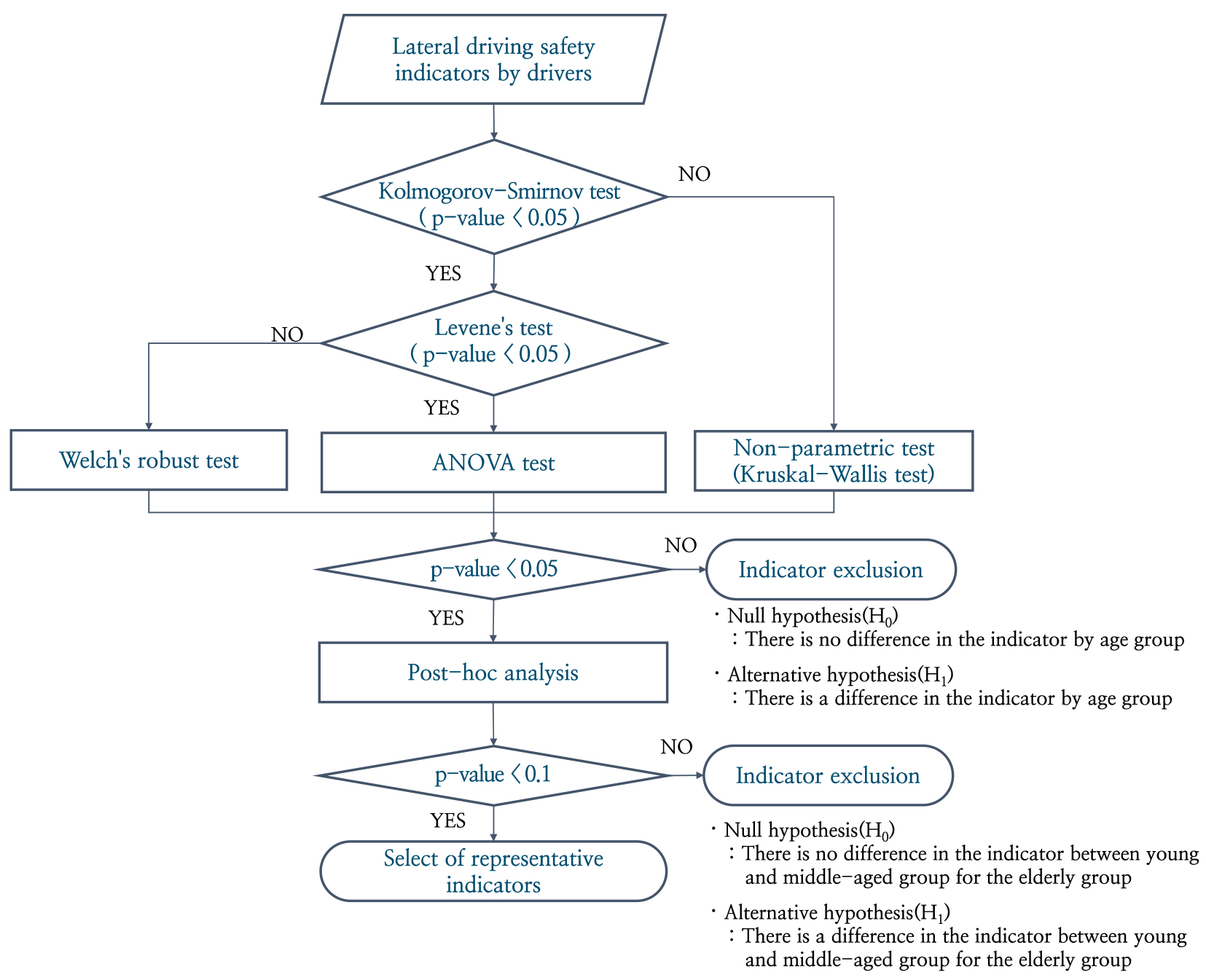
본 연구의 분석절차는 Figure 5에 나타냈다. 분산분석 시 평가지표에 대해 독립성, 정규성 검정이 수행되어야 하며 검정 결과에 따라 상이한 분석방법을 적용하였다. 본 연구에서는 분석자료의 독립성이 있다고 가정하고 정규성 검정을 수행하였다. 각 횡방향 주행안전성 평가지표가 정규분포 형태인지 확인하기 위하여 정규성검정(Kolmogorov-Smirnov test)을 수행하여 정규성이 있는 지표와 정규성이 없는 지표를 구분하였다. 정규성이 없는 지표의 경우 비모수 검정(Kruskal-Wallis test) 방법을 이용하여 비모수적 분산분석을 수행하였다. 정규성이 있는 지표의 경우 분산의 동질성 검정 유무에 따라 상이한 분석방법을 수행하였다. 분산의 동질성 검정 결과, 동질성이 있는 평가지표의 경우 ANOVA를 수행하고 동질성이 없는 평가지표의 경우 Welch의 로버스트 검정을 수행하였다. ANOVA, Welch의 로버스트 검정 및 비모수 검정(Kruskal-Wallis test) 수행 결과 5개의 평가지표 중 유의확률(p)이 유의수준 범위 내에 해당하는 경우, 연령층에 따른 횡방향 주행안전성 평가지표의 통계적인 평균 차이가 있고 유의확률이 유의수준 범위 내에 해당하지 않는 경우, 연령층에 따른 횡방향 주행안전성 평가지표의 평균 차이가 없다고 해석하였다. 각 연령층 중에서 고령 운전자와 청년층 및 중장년층 간의 횡방향 주행안전성 평가지표의 평균 차이를 검정하기 위해 사후분석을 수행하였다. 사후분석을 수행하여 유의확률이 신뢰수준 미만인 평가지표를 고령 운전자의 주행안전성을 나타낼 수 있는 대표 평가지표로 선정하였다.
분석결과
1. 운전자 주행속도 분포 분석
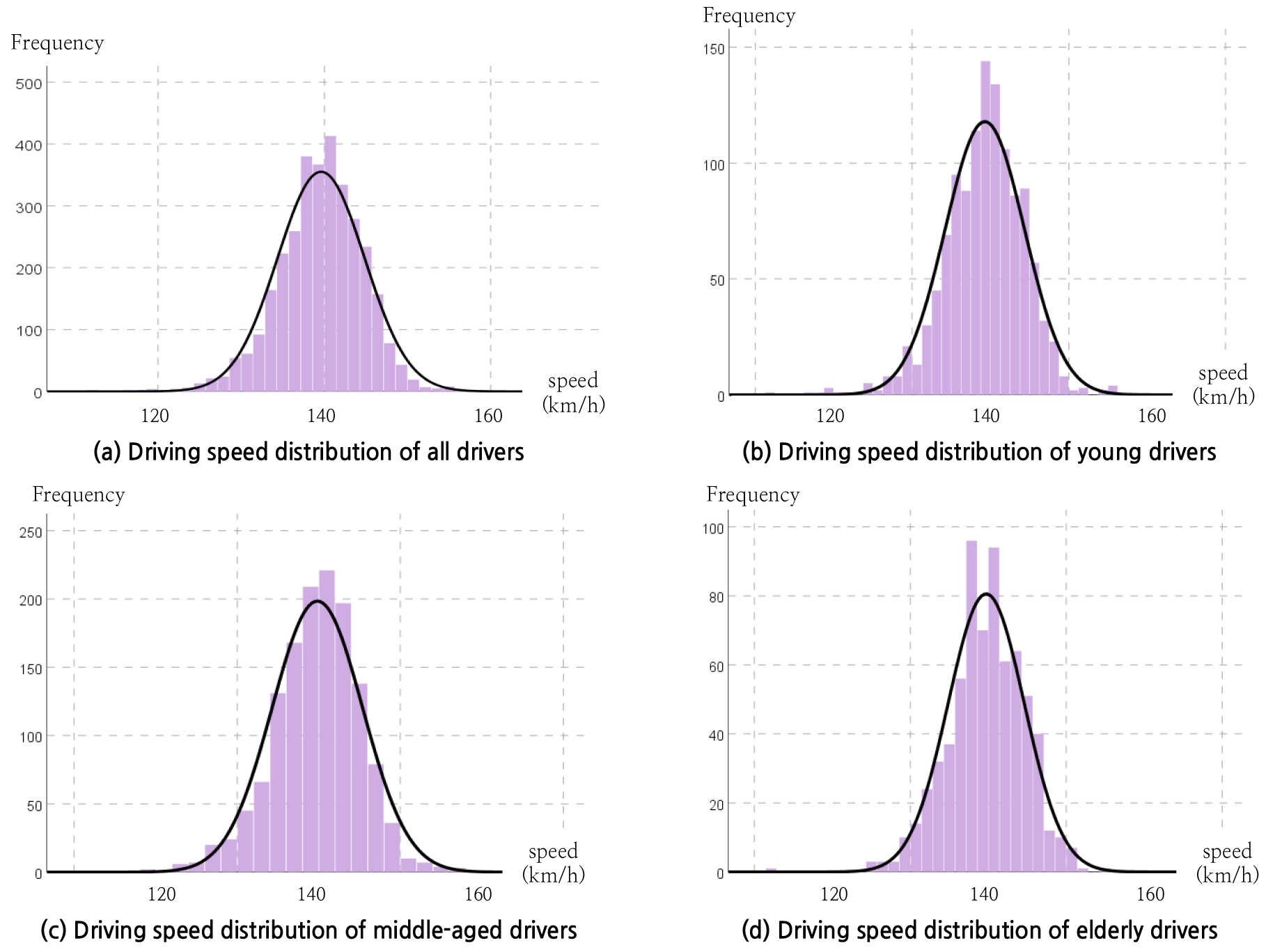
실험에 참가한 모든 운전자가 초고속주행을 수행하였는지 확인하기 위해 설계구간별 주행속도 분포를 Figure 6에 나타냈다. Figure 6(a)는 모든 운전자의 주행속도 분포로 평균 속도는 139.6km/h, 표준편차는 5.24km/h로 나타났다. Figure 6(b)는 청년층 운전자의 주행속도 분포로 평균 속도는 139.3km/h, 표준편차는 5.06km/h, Figure 6(c)는 중장년층 운전자의 주행속도 분포로 평균 속도는 139.8km/h, 표준편차는 5.55km/h, Figure 6(d)는 고령층 운전자의 주행속도 분포로 평균 속도는 139.7km/h, 표준편차는 4.88km/h로 나타났다. 각 연령층 그룹 및 모든 운전자는 주행실험 시 주행속도 140km/h 수준에서 주행한 것으로 나타났다.
2. 고령 운전자 대표 평가지표 선정
고령 운전자의 주행안전성을 대표할 수 있는 평가지표를 선정하기 위하여 연령층에 따른 각 운전자 그룹별 평가지표 산출 값의 평균 차이를 통계적으로 분석하였다. 분석자료가 정규분포를 따르는 모집단에서 취해졌는지 확인하기 위하여 5개의 평가지표에 대해 정규성 검정(Kolmogorov-Smirnov test)을 수행하였으며 정규성 검정 결과를 Table 5에 나타냈다. 정규성 검정 결과는 유의수준 0.05를 기준으로 해석하며 유의확률 값이 0.05 이상인 경우 정규성이 있고, 유의확률 값이 0.05 미만인 경우 정규성이 없는 것으로 나타냈다. 5개의 평가지표 중 차로이탈률, Lane position 표준편차, 횡방향 가속도 표준편차, RMPSS 평균의 유의확률 값은 0.05 미만으로 나타나 정규성이 없고 등가임계 횡방향 가속도 평균의 유의확률 값이 0.05 이상이므로 정규성이 나타났다. 정규성이 없는 평가지표의 경우 비모수검정 방법을 수행하고 정규성이 나타난 평가지표의 경우 ANOVA 분석을 수행하였다. 각 연령층별 주행안전성 차이가 나타나는 횡방향 주행안전성 지표를 선정하기 위하여 연령층별 주행안전성 평가지표의 평균 차이가 통계적으로 유의한지 확인하기 위하여 모수적 방법인 ANOVA 분석과 비모수적 방법인 Kruskal-Wallis를 수행하여 Table 6과 Table 7에 나타냈다. 귀무가설은 연령층에 따른 평가지표 산출 값의 평균 차이가 통계적으로 유의하지 않는 것이다. 등가임계 횡방향 가속도에 대하여 모수적 방법인 ANOVA를 수행하였으며 유의확률이 0.003으로 나타나 유의수준인 0.05 미만이므로 연령층에 따른 평가지표 산출 값의 통계적인 평균 차이가 나타났다. 비모수적 방법인 Kruskal-Wallis 방법을 수행한 결과 차로이탈률, Lane position 표준편차, 횡방향 가속도 표준편차의 유의확률이 0.05 미만이므로 연령층에 따른 평가지표 산출 값의 통계적인 평균 차이가 나타났다. RMPSS 평균의 경우 유의확률이 0.05 이상이므로 연령층에 따른 통계적인 평균 차이가 나타나지 않았다. 이는 모든 운전자의 주행속도가 140km/h 수준으로 편차가 크지 않았고 차로를 완전히 벗어나는 정도의 경우가 없었으므로 본 연구의 실험 환경에서 RMPSS 평균 값은 주행안전성 평가지표로 적절치 않은 것으로 판단된다.
Table 5.
Result of Kolmogorov-Smirnov test
Table 6.
Result of ANOVA test
| Sum of squares | df | Mean square | F | Sig. | |
| Between groups | 0.002 | 2 | 0.001 | 6.491 | 0.003 |
| Within groups | 0.009 | 68 | 0.000 | ||
| Total | 0.010 | 70 |
Table 7.
Result of Kruskal-wallis test
|
Rate of run-off the lane |
Std.deviation of lane position |
Std.deviation of lateral acceleration | Mean of RMPSS | |
| Kruskal-wallis H | 6.103 | 14.373 | 14.052 | 1.717 |
| df | 2 | 2 | 2 | 2 |
| Sig. | 0.047 | 0.001 | 0.001 | 0.424 |
고령 운전자의 주행안전성을 대표할 수 있는 평가지표를 선정하기 위하여 사후분석을 통해 연령층별 평균 차이가 통계적으로 나타나는 평가지표 중에서 고령층과 청년 및 중장년층 간의 평가지표 산출 값의 평균 차이가 통계적으로 나타나는 평가지표를 선정하였다. 사후분석은 차로이탈률, 등가임계 횡방향 가속도, Lane position 표준편차, 횡방향 가속도 표준편차 4가지의 평가지표에 대해 수행하였다. 유의수준 0.1을 기준으로 유의확률이 0.1 미만인 경우 고령층과 청년 및 중장년층 간의 평가지표 산출 값의 평균 차이가 통계적으로 나타나고, 0.1 이상인 경우 통계적으로 평균 차이가 나타나지 않는 것으로 해석하였으며 결과는 Table 8에 제시하였다. 사후분석을 수행한 결과, 등가임계 횡방향 가속도와 Lane position 표준편차의 경우 고령층과 청년층 간의 유의확률이 0.1 미만으로 평가지표 산출 값의 평균 차이가 통계적으로 유의한 것으로 나타났으나, 고령층과 중장년층 간의 유의확률이 0.1 이상으로 평가지표 산출 값의 평균 차이가 통계적으로 유의하지 않는 것으로 나타났다. 차로이탈률과 횡방향 가속도 표준편차의 경우 고령층과 청년 및 중장년층 간의 유의확률이 모두 0.1 미만으로 나타났으므로 고령 운전자의 주행안전성을 나타낼 수 있는 평가지표로 차로이탈률 및 횡방향 가속도 표준편차를 선정하였다.
Table 8.
Result of ANOVA test (post hoc analysis)
3. 주행안전성 취약구간 도출
횡방향 주행안전성 평가지표 산출 값이 증가할수록 주행안전성의 저하를 의미하므로 주행안전성 취약구간을 나타내기 위하여 설계구간별 대표 평가지표의 최대값부터 상위 5개 구간을 도출하여 Table 9와 Table 10에 나타냈다. Table 9는 차로이탈률에 대한 주행안전성 취약구간을 나타냈으며 5개 구간 중 4개 구간의 평면곡선 반지름이 3,000m 미만으로 나타났으며 종단경사는 볼록 혹은 내리막 경사인 구간이 나타났다. Table 10은 횡방향 가속도 표준편차에 대한 주행안전성 취약구간을 나타냈으며 평면곡선 반지름이 3,000m 미만이고 종단경사가 내리막 구간이며 연속터널 구간에 해당하는 설계구간인 C-1 구간이 횡방향 주행안전성이 가장 저조한 구간으로 나타났다. 평면곡선 반지름 범례 중 고규격인 3,500m 이상 4,000m 미만인 구간의 경우, 종단경사가 내리막이고 연속터널 구간에 해당하는 A-1 설계구간이 주행안전성 취약구간으로 나타났다.
Table 9.
Unsafe road section (indicator: rate of run-off the lane)
Table 10.
Unsafe road section (indicator: Std.deviation of lateral acceleration)
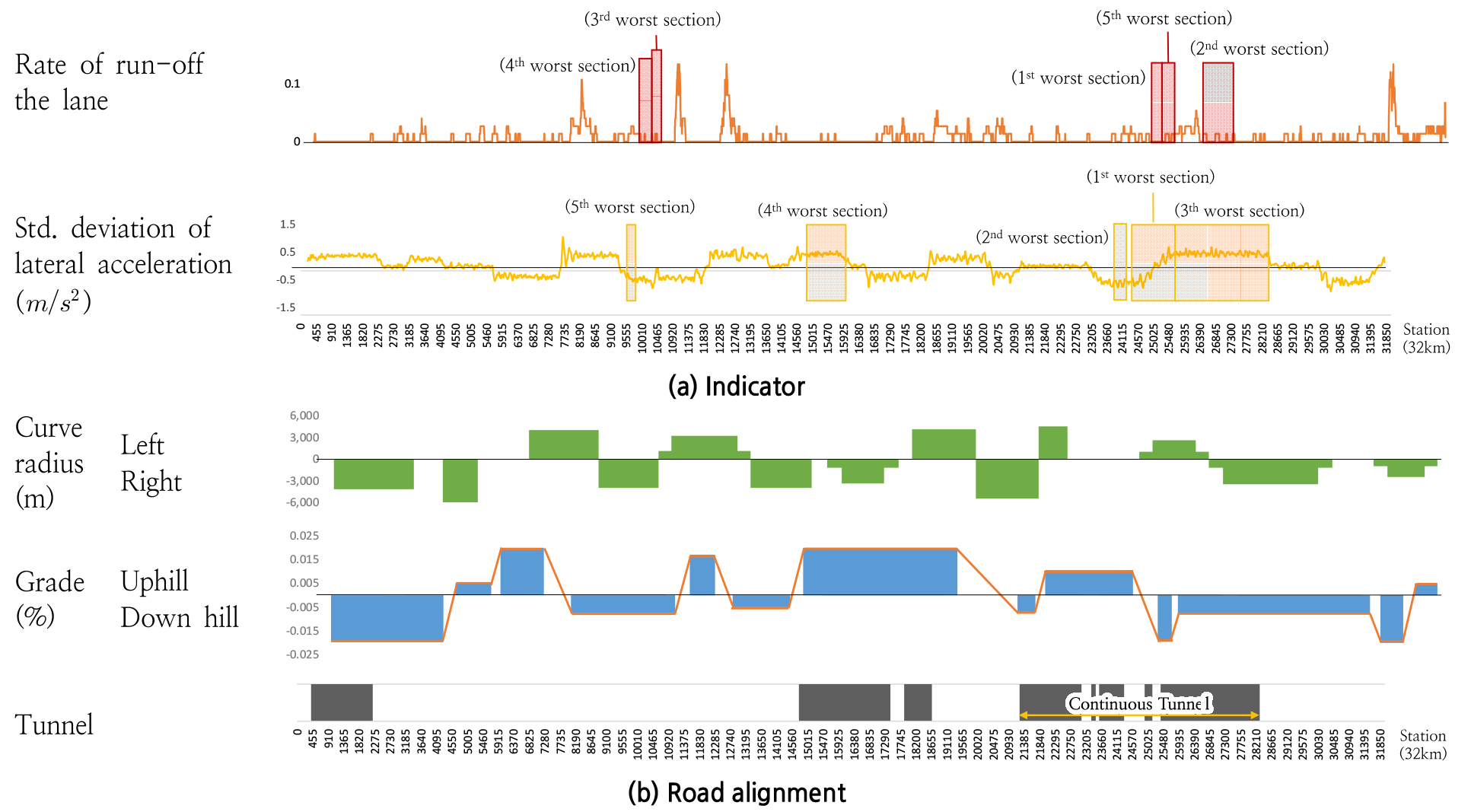
본 연구의 분석범위인 안성-용인 구간에 대하여 고령 운전자의 횡방향 주행안전성 대표 평가지표인 차로이탈률, 횡방향 가속도 표준편차의 프로파일과 도로선형 특성인 평면곡선 반지름, 종단경사, 터널구간의 프로파일을 Figure 7에 나타냈다. 연속터널 구간의 중-후반부에서 차로이탈률과 횡방향 가속도 표준편차에 따른 고령 운전자의 횡방향 주행안전성 취약구간이 나타났고 횡방향 가속도 표준편차에 따른 취약 4구간 또한 터널 구간에 해당하는 구간으로 나타났다.
고령 운전자 횡방향 주행안전성 취약구간 개선대책
본 장에서는 고령 운전자의 횡방향 주행안전성 취약구간 특성 분석결과를 반영한 초고속주행 환경에서 고령 운전자의 곡선부 주행 시 차로이탈률과 횡방향 가속도 표준편차 감소를 위한 방안을 제시하였다. 특히, 운영 및 시설 관점에서 차로이탈 및 과속방지를 위한 개선대책을 제시하였다.
PT-bar(Peripheral transverse bar)는 운전자에게 시각적으로 차로가 좁아보이도록 하여 차로이탈 방지 및 주행속도 감속의 효과가 있다(Agent., 1980; Noh et al., 2010; Hong, 2013). 따라서 노면에 PT-bar를 설치하여 운전자의 선형에 대한 인지 수준을 향상시키고 핸들 조작에 집중하도록 유도할 수 있으며 이를 통해 차로이탈 사고 및 근접 차로를 주행하고 있는 주변 차량과의 측면 충돌 사고를 방지할 수 있을 것으로 예상된다. 또한 가변제한속도(Variable speed limit, VSL)를 운영하여 운전자에게 적정 주행속도 정보를 제공하거나, 구간 혹은 지점 과속단속을 운영하여 주행 속도를 조정하고 사고 가능성을 줄일 수 있다(Choi and Oh, 2016).
차로이탈률에 대한 주행안전성 취약 3, 4순위 구간과 횡방향 가속도 표준편차에 대한 주행안전성 취약 5구간의 경우 우커브와 내리막 경사 구간에 속해있다. 내리막 경사는 중력에 의한 가속이 발생할 가능성이 있으며 강설, 강우 시 수막 현상이 발생할 수 있다. 따라서 타이어와 노면사이의 마찰력을 증가시켜 횡방향 미끄럼을 방지할 수 있는 종방향 그루빙 설치하여 운전자의 가감속 조절을 보완할 필요가 있다(Ministry of Land, Infrastructure and Transport, 2016b). 특히 저규격의 평면곡선 반지름으로 설계한 곡선부 도로에 종방향 그루빙을 설치하여 노면과 타이어 간의 마찰저항을 증가시킨다면 과속 방지를 유도할 수 있을 뿐만 아니라, 차량에 전해지는 진동의 변화로 인해 운전자의 주의를 환기할 수 있다.
10개의 주행안전성 취약 구간 중 6개의 구간이 속해있는 연속터널 구간의 경우 계속적인 터널 진출입에 따라 반복되는 명 ‧ 암순응으로 인한 선 ‧ 후행 차량 간 추돌 사고가 발생할 수 있다. 초지향성 스피커는 소리의 방향성을 이용해 장거리 경고정보를 효과적으로 제공할 수 있어 안전개선에 잠재적으로 효과적인 방안으로 제시되었다(Phanomchoeng et al., 2010; Moon et al., 2016). 따라서 초지향성 스피커(Super directional speaker) 혹은 VMS(Variable message system) 운영을 통해 운전자에게 경고정보 또는 적정 주행속도 정보를 제공하여 운전자의 안전운전 및 감속을 유도하여 추돌사고를 예방할 수 있다. 초지향성 스피커는 일반 스피커 대비 송출하는 소리의 방향성과 직진성이 우수하여 목표하고자 하는 방향으로 정보 송출이 가능하며 VMS의 경우 운전자에게 경고 정보 제공을 통한 안전 운전을 유도할 수 있다(Lee et al., 2018). 터널 내의 휘도 수준을 증가시키면 운전자의 속도 변화에 대한 민감도 수준을 증가시켜 과속을 방지할 수 있으므로 터널 내부 조명 설치 시 고휘도의 조명을 설치하여 운전자의 속도 변화에 대한 민감도 수준을 증가시켜 과속에 대한 운전자의 주의를 환기시키고 과속을 방지할 수 있다(Wan et al., 2015).
결론
본 연구는 초고속주행 환경에서 고령 운전자의 횡방향 주행안전성 취약구간의 특성을 분석하고 취약구간에 대한 개선대책을 마련하였다. 운전자 주행속도 분포를 분석한 결과, 모든 운전자는 본 연구의 실험 환경에서140km/h 수준으로 주행한 것으로 나타났다. 정규성 검정을 통해 연령층별 평가지표 산출 값의 통계적인 평균 차이를 분석하기 위한 분석방법을 구분하였다. 5개의 평가지표 중 등가임계 횡방향 가속도의 평균은 ANOVA 분석을 수행하고 나머지 4개의 평가지표는 Kruskal-Wallis 검정을 통해 각 연령층 간의 평가지표 산출 값의 통계적인 평균 차이를 분석하였다. 각 연령층 중에서도 고령 운전자의 횡방향 주행안전성을 나타낼 수 있는 대표 평가지표를 선정하기 위해 사후분석을 통해 차로이탈률과 횡방향 가속도 표준편차를 대표 평가지표로 선정하였다. 대표 평가지표에 따라 횡방향 주행안전성 취약구간과 취약구간의 특성을 도출하였다. 차로이탈률에 따른 상위 5개의 횡방향 주행안전성 취약구간의 특성은 평면곡선 반지름의 경우 주로 3,000m 미만인 것으로 나타났고, 종단경사의 경우 볼록 혹은 내리막 경사로 나타났으며 연속터널 구간에 해당하는 것으로 나타났다. 횡방향 가속도 표준편차에 따른 상위 5개의 횡방향 주행안전성 취약구간의 특성은 평면곡선 반지름의 경우 모든 평면곡선 반지름 범례의 특성이 나타났고, 종단경사의 경우 주로 내리막 경사가 나타났으며 연속터널 구간에 해당하는 것으로 나타났다. 횡방향 주행안전성 평가지표와 도로선형을 주행구간인 안성-용인 구간에 대하여 프로파일로 나타낸 결과, 주행안전성 취약구간은 10개 중 6개의 구간이 연속터널 구간의 중-후반부에서 나타났다. 고령 운전자는 초고속주행 환경에서 곡선부 주행 시 평면곡선 반지름이 비교적 저규격인 구간과 내리막 경사인 구간 그리고 연속터널 구간에 의해 횡방향 주행안전성에 영향을 받는 것으로 나타났다. 이는 운전자의 평면선형에 대한 인지 수준이 저하되고 반복되는 명 ‧ 암순응이 주행행태에 영향을 미친 것으로 예상된다.
따라서 초고속도로 설계 또는 기존 고속도로에서의 제한속도 상향 시 고령 운전자의 횡방향 주행안전성을 고려한 개선대책이 필요하다. 본 연구에서는 곡선부 주행 시 횡방향 가속도 표준편차와 차로이탈률의 감소를 위해 운영 및 시설 관점에서 과속 및 차로이탈 방지를 위한 개선대책을 제시하였다. 과속방지를 위한 개선대책으로는 가변제한속도 및 구간 단속을 운영하거나 종방향 그루빙과 같은 미끄럼방지포장이 있으며, 이를 통해 운전자의 감속을 유도할 수 있다. 차로이탈 방지 개선대책으로는 노면 상에 PT-bar를 표시할 수 있으며, 이를 통해 운전자에게 주의환기와 선형에 대한 인지 수준을 향상시킬 수 있다. 연속터널 구간에 대한 개선대책으로는 송출된 소리의 방향성과 직진성이 우수한 초지향성 스피커 혹은 VMS를 활용할 수 있으며, 이를 통해 적정 주행속도 및 경고정보 제공을 통해 운전자의 안전운전을 유도할 수 있다. 또한 고휘도의 조명을 설치하여 운전자에게 속도 변화에 대한 민감 수준을 향상시켜 과속을 예방할 수 있다. 본 연구 결과는 초고속도로 설계 및 기존 고속도로의 제한속도를 상향하거나 초고속도로의 안전관리지침 마련 시의 기초자료로 활용할 수 있을 것으로 기대된다.
다만 초고속주행은 도로의 이동성을 향상시키고자 하는 목적이 있으나 본 연구에서는 안전성 평가만을 수행하였다. 본 연구를 발전시키기 위해서는 현 고속도로의 최고 설계속도인 120km/h에 대한 속도 시나리오를 추가하여 설계속도 140km/h에서의 이동성 및 안전성을 비교 평가하여 이동성 향상률 대비 안전성의 저하율을 평가할 필요가 있다. 시뮬레이션 자료로부터 도출한 분석결과의 신뢰성 제고를 위해 향후 서울-세종 고속도로 개통 후 안성-용인 구간의 주행자료를 수집하여 실제 주행안전성 분석 결과와 시뮬레이션 자료 기반의 주행안전성을 비교할 수 있다. 또한 고령 운전자의 경우 비고령 운전자에 비해 인지 ‧ 판단 능력이 저조하므로 고령 운전자의 안전한 합류를 위해서는 고속도로 가속차로의 유입연결로 길이의 증대를 고려해볼 수 있다(Jung et al., 2020). 따라서 초고속주행 환경에서 고령 운전자의 주행행태를 고려한 적정 가속차로 길이 평가 연구를 수행할 필요가 있다.
본 연구의 주행안전성 취약 구간 도출 시 각 평가지표에 대하여 고령 운전자 주행안전성 취약구간을 선정하였으나 향후 연구에서는 2개의 횡방향 주행안전성 평가지표를 하나의 지표로 통합하여 종합적인 주행안전성 취약구간을 선정할 필요가 있다. 「고용상 연령차별금지 및 고령자고용촉진에 관한 법률 시행령」에서 정의하는 준고령자는 50세 이상 55세 미만인 사람이고 고령자는 55세 이상인 사람을 의미한다. 운전자의 근무 여부와 같은 사회인구학적 특성은 주행행태 영향을 미칠 수 있으므로 고용법에서 정의하는 고령자 연령을 고려하여 고령 운전자의 연령 기준을 재정의하여 주행안전성을 분석할 필요가 있다.
