

서론
신호교차로에서 교차로의 용량 부족 및 운영 효율성 저하는 차량의 추가적인 통행시간으로 나타난다. 여러 차량의 추가적인 통행시간을 정량적인 하나의 값으로 나타내는 평균 제어 지체는 교차로 신호 운영의 서비스 수준을 결정하는 주요 지표이다. 평균 제어 지체는 신호교차로에서 한 차량이 겪는 평균적인 시간 손실을 나타내며, 차량의 교차로 도착 시점과 진출 시점에 따라 결정된다. 지체 분석 모형에서 신호교차로의 차량의 도착 시점을 결정하는 도착 분포는 균일, 랜덤, 군집의 형태로 나누어지며, 대부분의 지체 분석 모형은 균일한 도착 환경을 가정하여 분석을 수행한다. 이때, 동일한 포화도에서 차량의 도착 시점에 따라 지체가 달라지므로, 이를 보완하기 위하여 보정 과정을 거친다(Roger et al., 2018).
Ministry of Land, Infrastructure and Transport(2021)의 ‘스마트 신호운영 시스템’ 구축 사업을 통해 신호교차로에 영상 검지기 설치가 확대되었다. 이에 따라 주요 교차로에서 영상 검지기의 설치가 이루어졌으며, 영상 구간 내에 차로별로 존재하는 차량을 인식하여 실제 차량의 검지 정보를 생성한다. 단위 시간당 통과 교통량, 차량 속도, 대기행렬 길이 등을 수집하며, 동시에 매 순간 화면에 인식되고 있는 차량 대수도 측정할 수 있다.
이에 본 연구는 영상 검지를 바탕으로 차량 대수를 차량 점유율로 활용하여 점유율 기반의 신호 교차로의 지체 산정 방법을 제시하였다. 차량이 접근로 내 영상 검지 범위에 진입할 때 생성되는 차량 점유율을 통하여 개별 차량의 통행시간의 합인 총 통행시간을 산출한다. 차량의 도착 분포에 대한 별도의 가정 없이 영상 검지 데이터를 기반으로 산출되어 차량의 도착 시점에 대한 영향을 반영할 수 있다. 이후 교차로 통과 차량 수를 통하여 신호의 영향을 받지 않은 상태에서의 통행시간을 통해 평균 지체를 계산할 수 있도록 하였다. 제안된 방법의 정확성을 판단하기 위하여 연속된 두 개의 교차로 상황에서 지체 산정 결과를 확인하였다.
선행연구
전통적인 신호 교차로에서의 지체 산정 방법은 지체 모형을 이용한 방법과 개별 차량의 움직임을 모사하는 미시적 시뮬레이션 또는 시간에 따른 도로 변화를 수식으로 반영하는 수치적 모형 방법이 있다. 최근에는 머신러닝을 바탕으로 교통 변수들간의 관계를 학습하여 지체를 산정하는 방법이 등장하였다.
지체 산정 모형
도로와 교차로의 운영 상태를 분석하고 평가하기 위하여 사용되는 지침서 중 미국의 Highway Capacity Manual(HCM)의 경우, 신호교차로의 지체 산출 시 분석 대상 교차로의 도착 분포를 균일하다고 가정하여 분석을 진행한다. 이후 전체 도착 차량 중 녹색 시간 도착 차량의 비율을 통해 연동 보정 계수(Progression Adjustment Factor, PF)를 산출하여 이를 보정한다(Transportation Research Board National Academies of Sciences et al., 2022). 국내 도로 분석 지침서인 도로용량편람은 연동 보정 계수를 교차로의 신호 및 구간 거리에 의한 옵셋편의율을 통해 산출하여 보정한다(Ministry of Land, Infrastructure and Transport, 2013). Dion(2004)은 지체를 실제 교차로를 통과하는 데 걸리는 시간과 교통 신호 제어가 없는 경우 예상되는 주행 시간의 차이로 정의하고 그에 대한 신호교차로 지체 산정 방법으로 대기행렬 모형, 충격파 모형, 확률적 모형 및 미시적 시뮬레이션 모형에 대하여 동일한 교통 상황에 대하여 결과를 비교하였다. 1개 차선 및 독립 교차로 환경에서, 하나의 교통 상황에 대해 유사한 지체 결과를 보였다. Wu(2014)는 기존 HCM 지체 모델에서 상류 교차로의 영향으로 인한 차량 분포를 반영하는 연동 계수에 대하여 일반화된 모델을 제시하여 기존 방법보다 더 정확한 지체 산정 방법을 제시하였다.
미시적 시뮬레이션은 개별 차량의 움직임을 모사하여 개별 차량의 주행 결과를 바탕으로 지체를 산정한다. Yun et al.(2014)은 실제 현장 조사에 따른 지체 산정 결과를 바탕으로 KHCM 지체 산정식과 다양한 미시적 시뮬레이션 모델에서의 지체 산정 결과를 비교하였다. 이때, 실제 관측값과 분석 도구를 이용해 산출된 값의 정확도는 선택한 시뮬레이션 모델의 유형과 종류에 따라 다를 수 있는 것을 확인하였다.
수치적 모형 방법은 이산화된 시간과 공간 단위에서 교통 흐름의 동적 변화를 근사적으로 계산하는 방법으로, Srivastava et al.(2015)은 기존 Cell Transmission Model(CTM)에서 신호가 녹색으로 바뀐 후 대기행렬이 소거되는 과정에서 차량들의 가속을 반영하여 보다 현실을 잘 모사하도록 수정한 CTM을 제시했고, 이를 바탕으로 더 정확한 지체 시간 예측이 가능하도록 하였다. Lee et al.(2020)은 독립 교차로 상황에서 Kinematic Wave 모형을 기반으로 충격파 전이를 표현하며 교차로에서 직진과 좌회전 분리 상황 시 방향별 이동류간 영향을 반영한 지체 모형을 제시하였다.
신호교차로에서 산출할 수 있는 교통 변수에 따른 모형적인 접근 방법 이외에도, 1950년대부터 등장한 머신러닝 개념에 대하여 향상된 컴퓨터의 연산 능력에 따라 방대한 데이터를 처리할 수 있게 되어 이와 관련된 지체 산정 방법이 개발되었다. Bagdatli(2020)은 유전 알고리즘과 유전 프로그래밍을 혼합한 유전자 발현 프로그래밍(GEP)을 통해 다양한 비선형 변수들 간의 관계를 표현하여 차량의 지체를 모델링하고 예측하는 방법을 제시했으며, Bagdatli and Dokuz(2021)은 네 가지의 머신러닝 알고리즘을 각각 적용하여 차량 지체를 예측하여 결과를 비교하였고, 랜덤 포레스트(Random Forest,RF) 방법과 XGBoost 방법이 우수한 결과를 보였다. Subramaniyan(2022)는 HRNN 모델을 이용해 신호 시간과 같은 선형 요소와 교통량 및 이전 지체 시간과 같은 비선형 요소를 결합하여 교차로에서의 지체 시간을 예측하는 방법을 제시하였고, 시간 변화에 따른 패턴과 추세를 학습하여 교통 상황을 예측하여 지체를 산출하도록 하였다.
앞선 방법들을 비교한 Table 1과 같이 정확한 지체 산정을 위해 도로 운영 평가 지침서와 다양한 지체 모형, 최근 머신러닝에 이르기까지 다양한 방법이 제시되었지만, 연동 상태에 따라 상류부 교차로로부터 유입되는 차량의 도착 시점을 관측 데이터 기반으로 반영하는 방법은 많지 않았다. 차량의 교차로 도착 시점이 지체 산정 시 크게 영향을 미침에 따라, 기존의 지체 모형과 달리 영상 검지기를 통해 차량의 도착 시점을 반영하는 모형의 개발이 필요하다.
Table 1.
Summary of studies (delay model)
| Classification | Authors | Year | Description | Strengths | Limitations |
| Delay model | MOLIT | 2013 | ∙Assumes uniform arrival distribution and applies progression adjustment | ∙Applicable to local traffic conditions |
∙Does not reflect actual arrival patterns and individual vehicle arrival/departure times ∙Based on aggregate data |
| TRBNAS | 2022 | ∙Provides standardized guidelines | |||
| Dion | 2004 | ∙Compares various delay estimation models | ∙Comparison of multiple models and accuracy verification | ||
| Wu | 2014 | ∙Suggests delay estimation considering upstream signal impacts | ∙Reflects influence of upstream intersections | ||
| Microscopic simulation | Yun et al. | 2014 | ∙Compares field-observed delay with KHCM and various micro-simulation models | ∙Provides vehicle-level travel results | ∙Results vary depending on simulation tools |
| Traffic flow model | Srivastava et al. | 2015 | ∙Improves CTM by incorporating acceleration during queue discharge | ∙Realistic representation of traffic flow dynamics | ∙Complex model setup and calibration required |
| Lee et al. | 2020 | ∙Proposes a delay model reflecting shockwave dynamics using the Kinematic Wave theory | |||
|
Machine learning | Bagdatli | 2020 | ∙Proposes delay model using Gene Expression Programming (GEP) | ∙Learns complex nonlinear relationships and temporal patterns |
∙Black-box nature ∙Limited generalization |
| Bagdatli and Dokuz | 2021 | ∙Compares four ML algorithms (e.g., RF, XGBoost) for delay prediction | |||
| Subramaniyan | 2022 | ∙Suggests delay estimation using HRNN combining linear and nonlinear factors |
영상 기반 지체 산정
최근 컴퓨터 비전 분야의 발전으로 지점에 대한 정보 수집이 아닌 영상 정보를 기반으로 한 특정 영역의 정보를 수집할 수 있으며, 이를 반영하는 지체 산정이 가능해졌다. 영상 속 개별 차량의 궤적을 바탕으로 지체를 산출하는 방법에 대하여 Erdagi et al.(2023)는 교차로로 진입하는 개별 차량을 구분할 수 있는 영상을 모사한 시뮬레이션 데이터를 통해 교차로의 제어 지체를 산정하는 방법을 제시하였다. 영상 검지기에 검지된 차량은 검지 구간을 벗어날 때까지 하나의 ID를 부여받고, 이렇게 관측된 차량의 궤적 데이터로부터 MGGP 알고리즘을 통해 교차로 지체 시간에 대한 비선형 방정식을 생성하여 이를 지체 시간 계산에 활용하는 방법을 제시하였다. 이처럼 교차로 영상을 통한 관련 연구는 딥러닝의 성능이 확인된 이래로 활발히 진행되고 있다. 차량 궤적은 다중 객체 추적(Multi Object Tracking, MOT)으로부터 생성되며, 기본적으로 차량 탐지 이후 객체의 추적 단계로 이루어진다. Park et al.(2020)은 YOLOv3 알고리즘을 통해 차량 탐지를 진행하고, 차량의 추적을 위해서 영상 전체에 대한 광류 흐름을 Farneback의 방법을 이용하여 계산한다. 이때, 차량 탐지 및 추적에 사용되는 각 모듈의 작동 시간은 29 ms, 6 ms가 소요된다. Kumar et al.(2023)은 실시간 모니터링을 위해 차량 탐지 및 추적을 위해서 YOLOv5 알고리즘과 Deep SORT 알고리즘을 이용하였다. 이러한 방법을 적용했을 때 91.25%의 정밀도(Precision)와 93.52%의 재현율(Recall)을 기록하였다. 차량의 궤적을 얻을 수 있는 다중 객체 추적 알고리즘은 차량의 탐지 이후의 추적 과정으로 두 단계에 걸쳐서 진행된다. 이때 추적 과정에서 추가적인 연산 시간과 정확도의 하락이 발생할 수 있다. 차량의 궤적을 정상적으로 만들어내기 위해서 차량이 구간을 주행하는 동안 하나의 ID로 유지되어야 하지만 선행 차량 및 장애물로 인한 가려짐 문제로 ID가 유지되지 않을 수 있으며, 이를 보정하기 위한 별도의 처리가 필요하다.
Table 2에 정리된 영상 기반 방법과 달리, 본 연구는 정확한 교차로의 지체 시간을 산정하기 위해서 개별 차량의 추적을 거치지 않고, 차량 탐지 단계에서 생성할 수 있어 데이터 처리가 더 가볍고 높은 정확도를 가지는 차량 점유율을 바탕으로 구간 검지 체계에서 차량의 도착 분포를 반영하는 지체 산정 방법을 제시한다. 영상 내 차량 점유율 정보만을 활용해 개별 차량 추적 없이 평균 지체를 산정할 수 있는 경량화된 접근을 제시함으로써, 기존 궤적 기반 방법론 대비 연산 부담이 낮고 실시간 적용 가능성이 높다는 점에서 기술적 차별성이 있다.
Table 2.
Summary of studies (video-based methodology)
| Classification | Authors | Year | Description | Strengths | Limitations |
| Video trajectory | Erdagi et al. | 2023 | ∙Estimated delay using simulated videos and MGGP-based trajectory modeling | ∙Vehicle-level delay modeling |
∙Requires full tracking ∙Vulnerable to ID loss and occlusion |
| Mot-based tracking | Park et al. | 2020 | ∙Applied YOLOv3 and optical flow for tracking |
∙Provides vehicle-level travel results ∙Real-time feasible |
∙Sensitive to occlusion ∙ID switching issues ∙Moderate computation demand |
| Kumar et al. | 2023 | ∙Used YOLOv5 and Deep SORT for real-time tracking |
차량 점유율 기반의 지체 산정
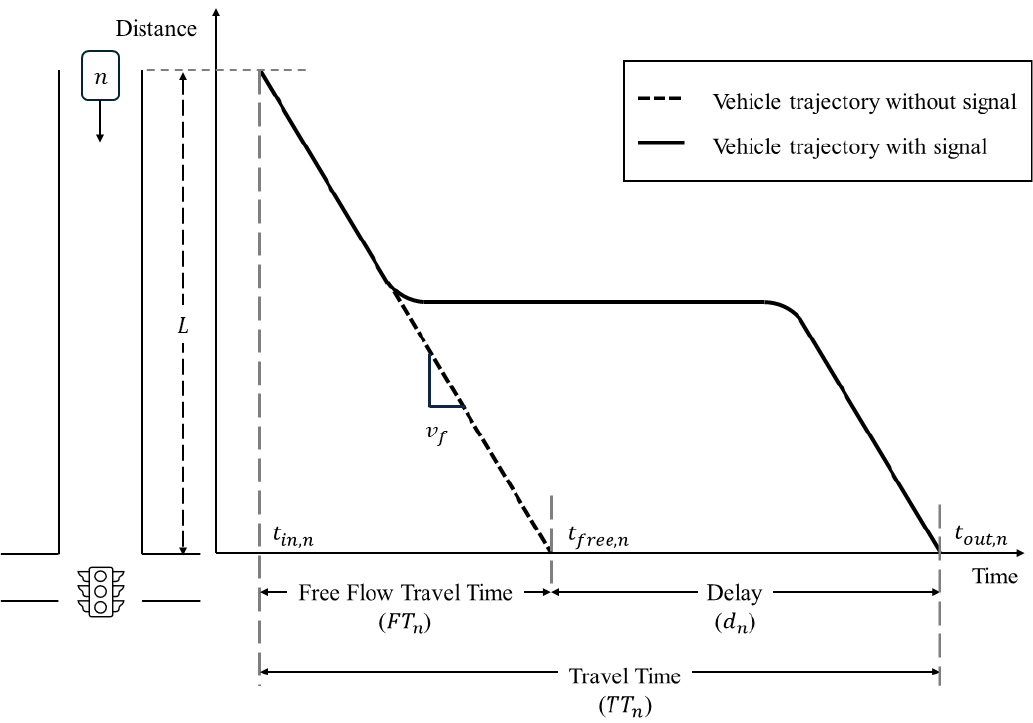
본 연구의 지체 산정 방법론의 최소 단위는 이동류 단위의 평균 제어 지체 이다. 이동류 단위의 평균 제어 지체는 Figure 1에 나타난 것처럼 같은 이동류를 주행한 개별 차량이 경험한 지체 의 평균으로 계산된다. 이때, Roger (2018)는 개별 차량의 제어 지체를 해당 차량의 통행시간 과 신호에 영향을 받지 않았을 때의 통행시간 의 차로 Equation 1과 같이 정의하였다.은 차량이 교차로를 통과한 시점 과 교차로에 진입한 시점 의 차이며, 는 차량이 신호에 의한 영향 없이 통과했을 때의 시점 과 의 차이다. Equation 2와 같이 은 구간의 길이와 속도에 의해 결정되는 와 같으므로, Equation 3에 따라 이동류 단위의 평균 제어 지체는 평균 통행시간과 자유 통행시간의 차로 계산할 수 있다.
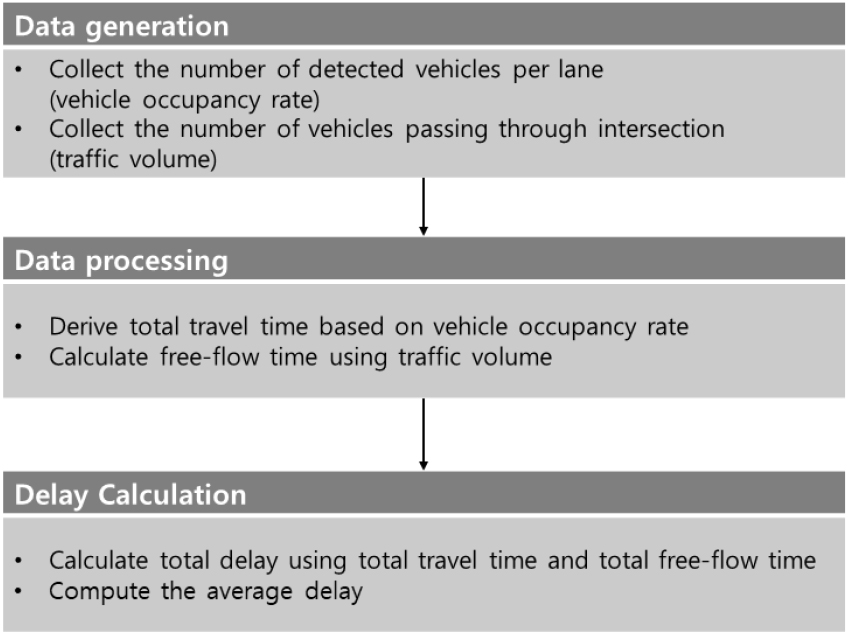
평균 지체를 산출하기 위하여 본 연구에서 제안하는 영상 검지 기반의 지체 산정은 Figure 2에 표현된 단계대로 진행된다. 우선 입력 자료로써 영상 검지로 차량 점유율과 통과 교통량 생성한다. 이후 차량 점유율을 통해 차량의 총 통행시간을 산정하고, 통과 교통량을 통해 자유 통행시간 산정을 진행한다. 산정된 두 통행시간은 Equation 3에 따라 평균 지체로 계산될 수 있다.
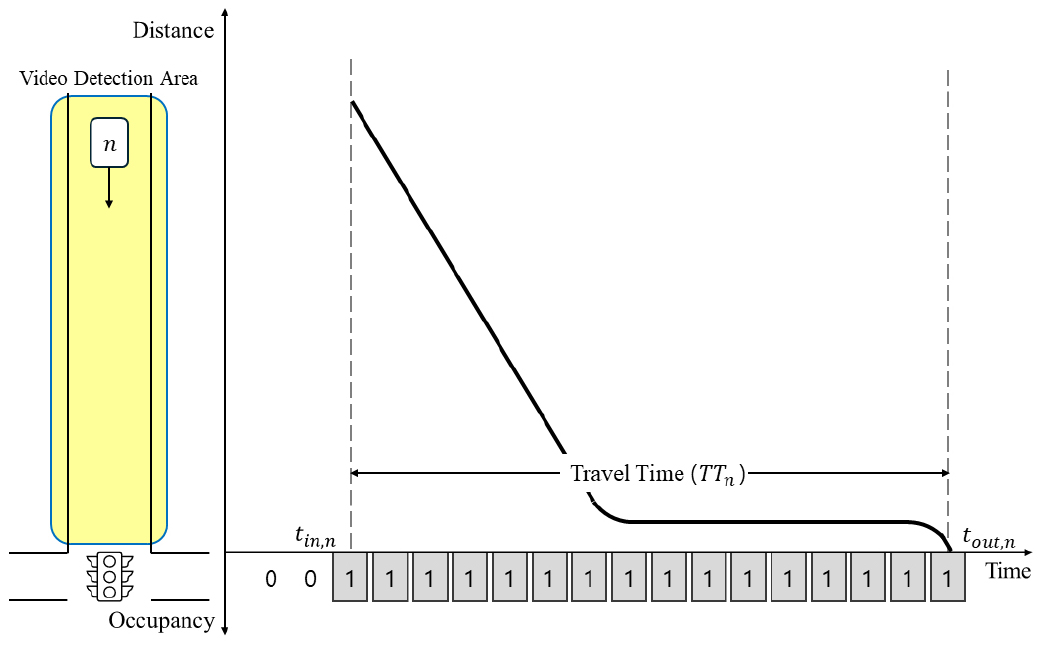
개별 차량의 통행시간은 통행 구간에서 차량이 존재한 순간의 수로 표현될 수 있다. 이러한 통행시간의 합을 산정하기 위하여 영상 검지기를 통해 생성되는 정보인 차량 점유율를 이용할 수 있다. 매초 기록되는 차량 점유율은 각 시점에 몇 대의 차량이 영상 검지기의 범위 안에 존재하였는지 나타낸다. 한 대의 차량 이 검지 범위를 지나는 경우, Figure 3과 같은 궤적으로 주행했을 때 차량의 통행시간은 시점에 진입하여 진출하는 시점까지의 이다. 같은 시간 동안 차량 이 주행하며 영상 검지 영역 내로 진입해 차량점유율이 발생하며, 은 Equation 4와 같이 교차로 접근로 구간에 1초 단위로 검지된 차량점유율의 합과 같다.
영상 검지기에서 차량 점유율이 생성되는 과정을 여러 대의 차량 궤적과 함께 Figure 4를 통해 나타내었다. a 시점에 신호주기가 시작되고, 첫 번째 차량이 구간 내로 진입하여 차량 점유율이 증가하였다. 이후 d 시점에 이르기까지 신호교차로의 적색 시간 동안 진입한 차량이 대기행렬을 형성하며 차량 점유율이 점차 증가하였다. 이후 녹색 신호가 켜진 e 시점부터 신호주기가 종료되는 f 시점까지 차량 점유율이 감소하는 모습을 보인다. 이때, 첫 번째 차량이 시점에 검지 범위에 진입하여 진출하기 직전인 시점까지 첫 번째 차량에 의해 차량 점유율이 유지되었다가, 시점에 첫 번째 차량이 빠져나가며 차량 점유율이 하락하게 된다. 이는 첫 번째 차량의 통행시간이 시점의 시간부터 시점의 시간 동안 구간에 존재하였고, 동시에 차량이 해당 시간 동안 구간을 주행한 것을 나타낸다. 같은 방식으로, 신호주기가 시작되는 시점부터 종료 시점인 시점까지 생성된 차량 점유율은 개별 차량의 통행시간에 대한 정보를 내재하고 있다. 집계된 정보가 아닌 매초 차량 점유율을 바탕으로 지체 시간 산정 시 차량의 도착 시점 분포가 반영되며, 구간 내 차량의 차선 변경과 같은 세부 지체 요인을 간접적으로 포함할 수 있다.
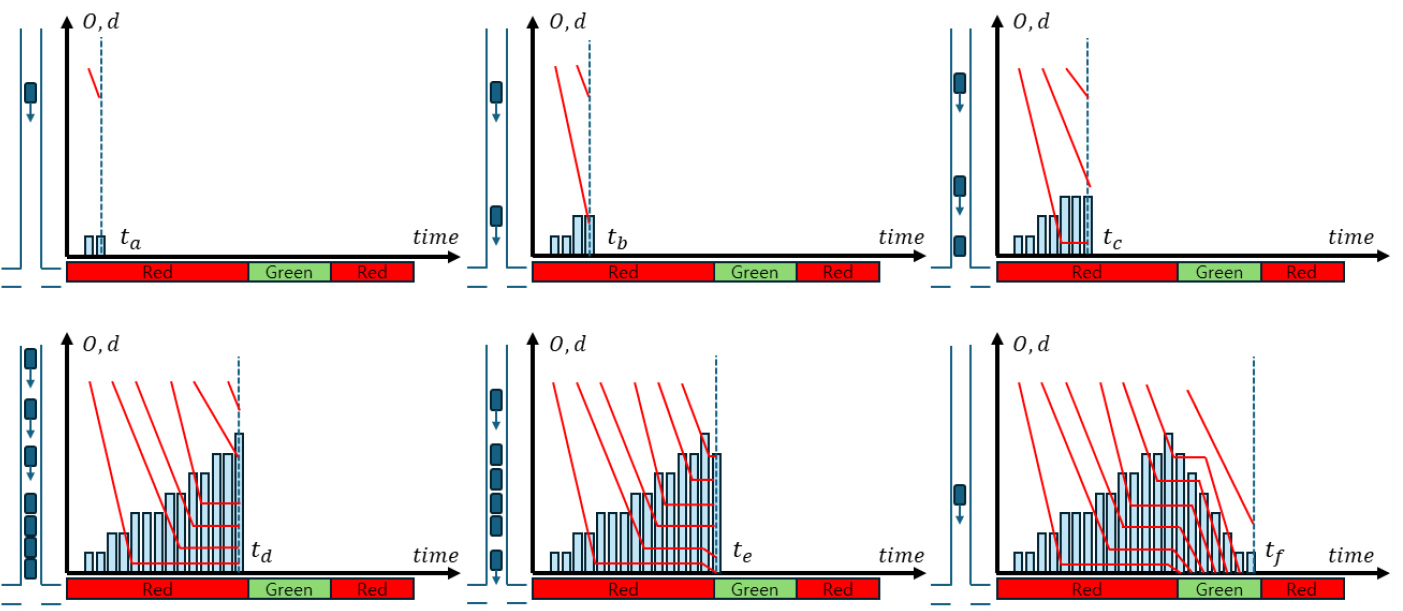
Figure 5는 실제 영상 검지기를 통해 차량 점유율을 나타내었다. 시점은 교차로의 이전 녹색 신호가 종료되며 이전 주기 차량이 대부분 통과하여 낮은 차량 점유율을 보인다. 이후 신호교차로의 적색 시간 동안 상류부에서 유입되는 차량에 의해 녹색 시간 직전의 시점까지 높은 차량 점유율이 형성되었다. 시점은 녹색 신호에 따라 차량이 교차로를 통과하며 차량 점유율이 낮아지다가, 이후 다시 상류부 유입으로 인해 증가하는 것을 확인할 수 있다.
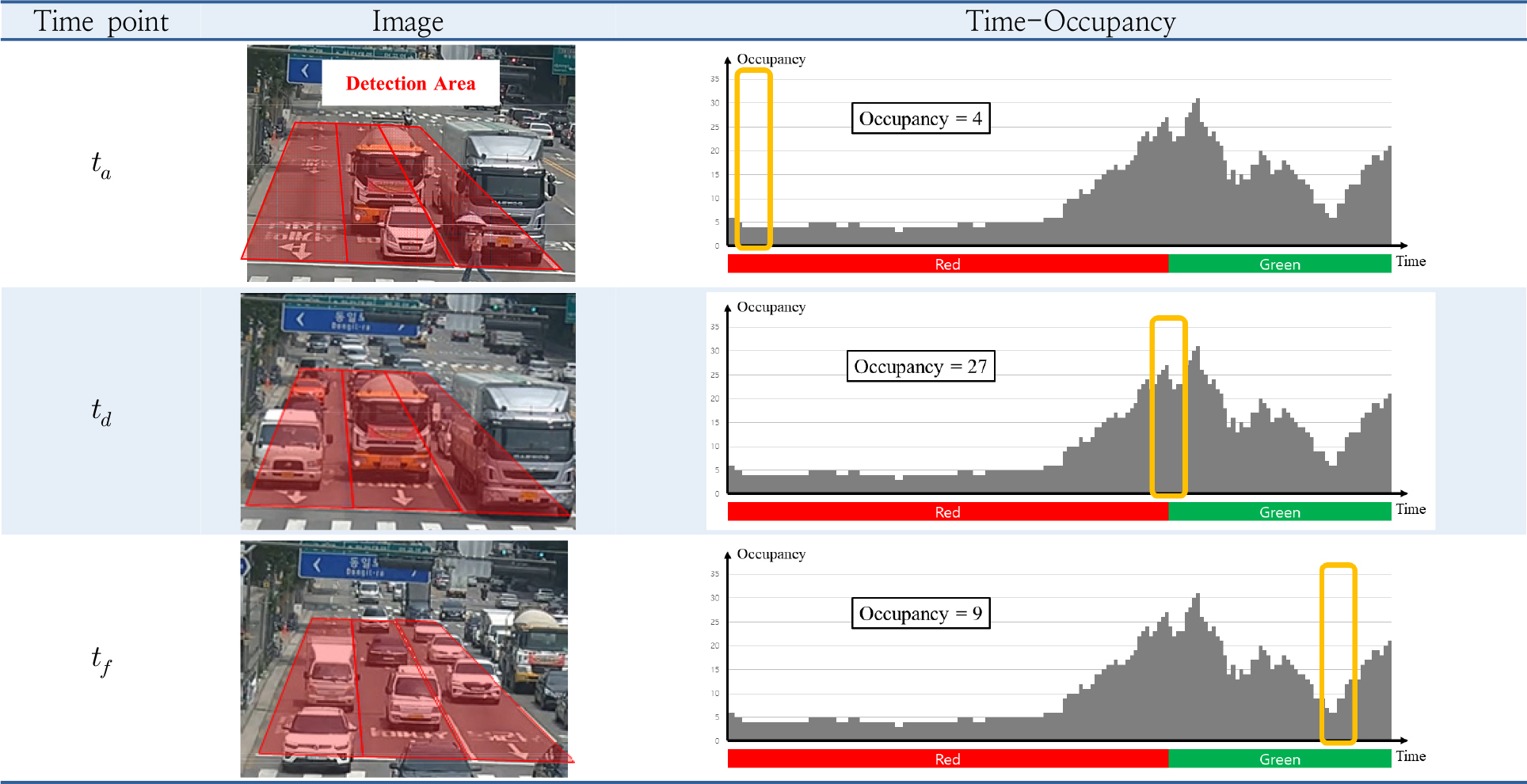
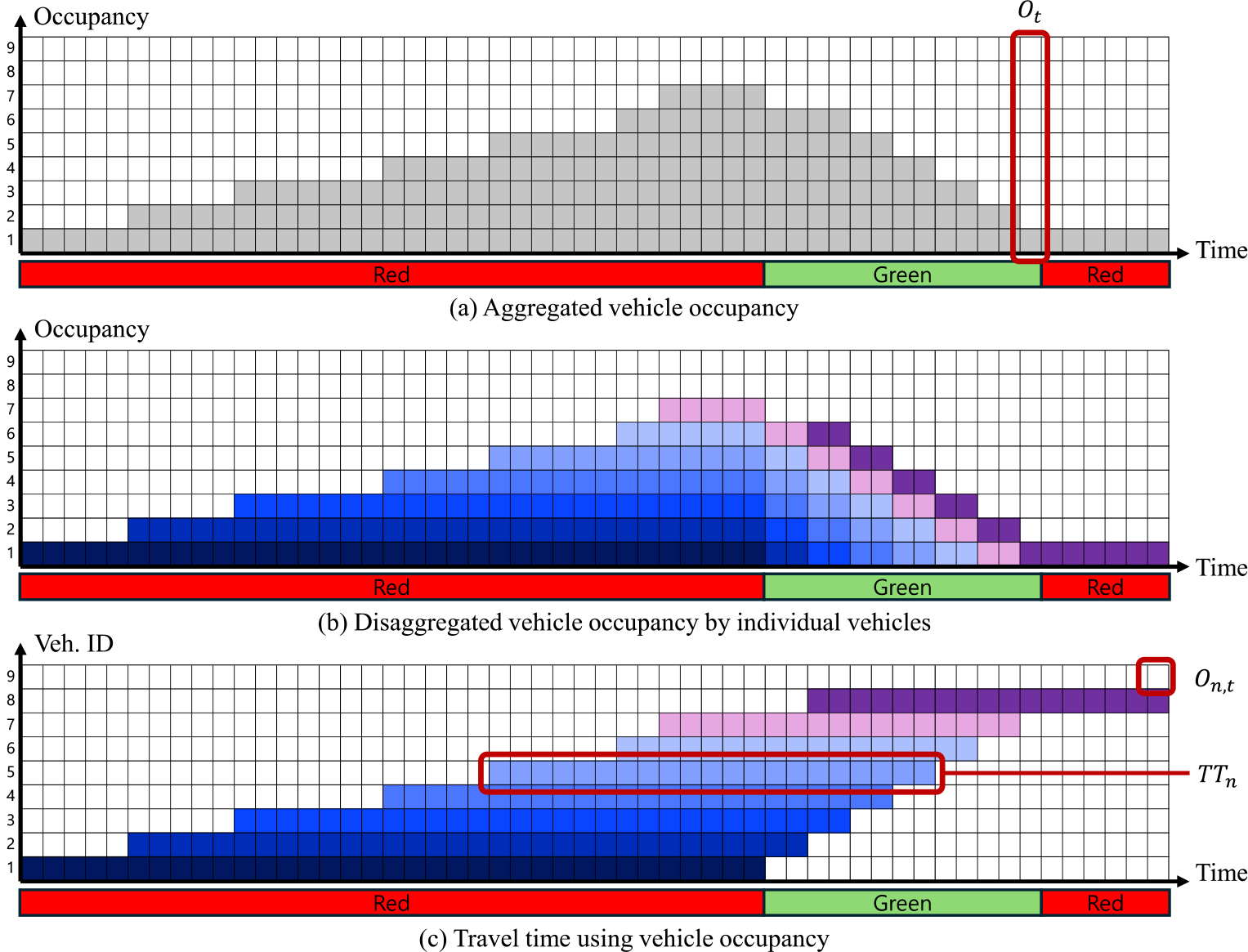
Figure 6(a)는 Figure 4의 시점을 나타내었다. 이때 시간에 대한 차량 점유율의 합()이 영상 검지기를 통해 기록된다. Figure 6(b)는 같은 그래프에 대하여 차량별로 차량 점유율에 영향을 미치는 수치를 구분하였다. Figure 6(c)는 Figure 6(b)에서 구분된 차량의 ID를 기준으로 검지 영역 내의 존재 여부를 나타내었다. 이때 하나의 칸은 한 시점에 대하여 특정 차량의 존재 여부()를 나타내며, 차량의 ID에 따른 합은 해당 차량의 통행시간()을, 시간에 따른 합은 차량 점유율의 합을 나타낸다. Figure 6(a), (b), (c)에서의 면적은 모두 같으며, 그 면적은 개별 차량의 통행시간의 합을 나타낸다. 따라서, 영상 검지기를 통해 검지된 차량 점유율의 합은 Equation 5와 같이 단위 시간 동안 주행한 개별 차량 통행시간의 합과 같다.
개별 차량의 자유 통행시간은 구간의 길이()와 자유 통행속도()에 따라 산출되며, 자유 통행시간의 합()은 교차로를 통과한 차량의 수()를 통해 계산할 수 있다. 따라서, 총 통행시간과 총 자유 통행시간을 개별 차량의 추적 없이 생성할 수 있는 영상 검지 정보인 차량 점유율과 통과 차량 수를 통해 구할 수 있고, Equation 7을 통해 이동류 평균 제어 지체를 산정할 수 있다.
실측 데이터 적용
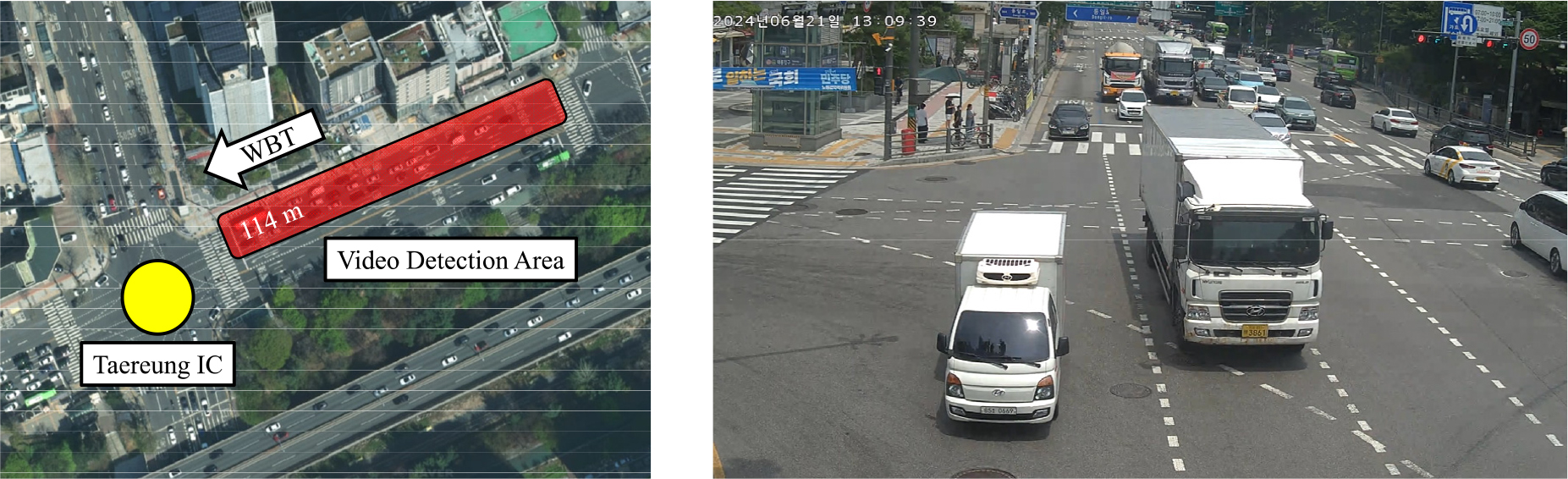
본 연구에서는 제안한 영상 기반 지체 산정 모델의 타당성을 확인하기 위하여 HCM에서 제시한 신호교차로 지체 산정식과 비교 분석을 수행하였다. 비교 분석에 사용된 실측 자료는 서울시 태릉입구역 교차로 서쪽 방향의 3, 4, 5차로 구간에서 2024년 6월 21일 13시 11분부터 3개 신호주기 동안 스마트교차로 카메라를 통해 수집된 영상과 인식 결과를 기반으로 하였다. 해당 시간 동안의 교차로 신호는 170초의 신호주기, 54초의 유효녹색시간으로 운영되었다. Figure 7을 통해 검지 영역에 대한 위치와 영상을 확인할 수 있다.
실측 지체 시간을 산정하기 위하여 녹화된 영상을 통해 개별 차량의 교차로 진입, 진출 시점을 특정해 총 주행 시간을 기록하였으며, 총 주행 시간 중 서울시 혼잡 경계 속도(27km/h)를 기준으로 교차로 통행시간을 제외하여 지체 시간을 계산하였다. 개별 차량별로 기록한 진입, 진출 시점을 바탕으로 통행시간과 지체 시간을 나타내면 Table 3과 같다.
Table 3.
Vehicle travel times calculations
| ID | In-time | Out-time | Travel time (sec) | Delay (sec) | |
| 1 |  | 13:09:37 | 13:11:38 | 122 | 107 |
| 2 |  | 13:09:37 | 13:11:42 | 126 | 111 |
| 3 |  | 13:11:09 | 13:11:47 | 39 | 24 |
| ... | |||||
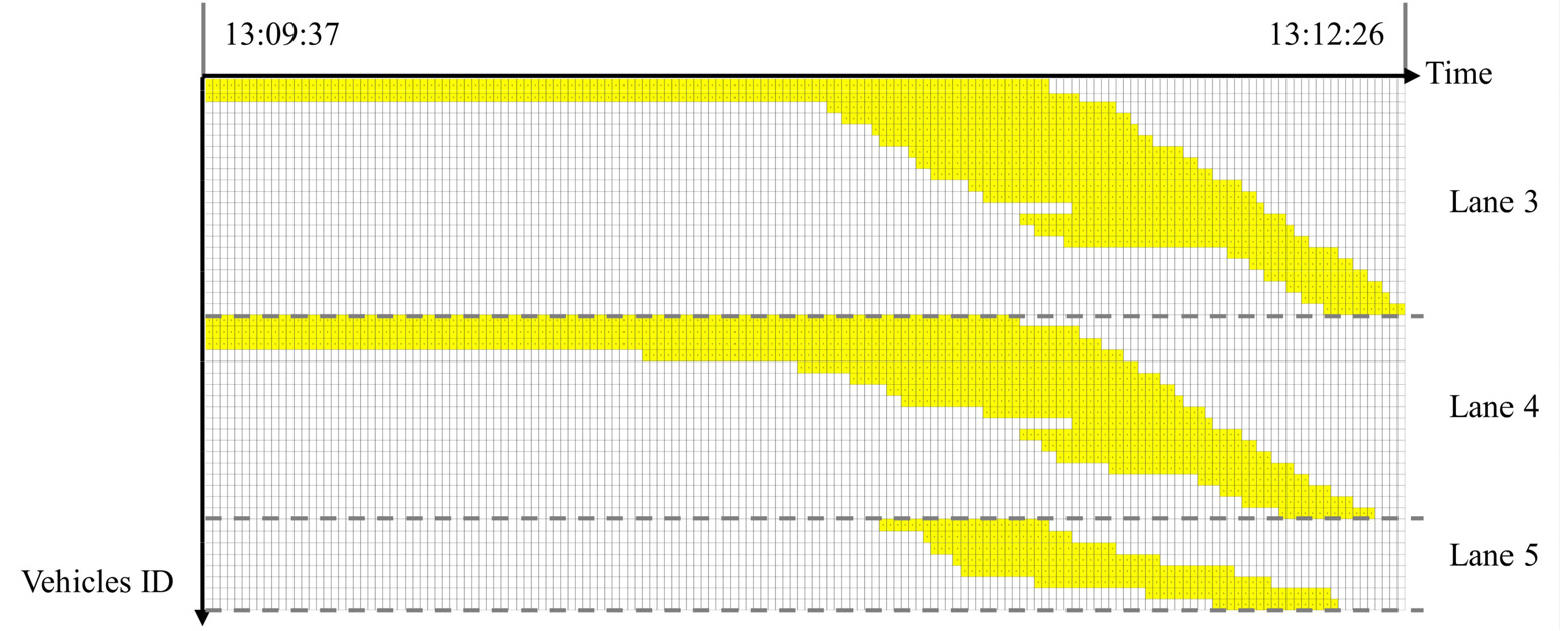
Figure 8은 영상을 통해 기록한 개별 차량의 진입, 진출 시점을 바탕으로 교차로 접근로에서의 존재 여부를 나타낸 그림으로, 하나의 노란색 영역은 해당 시점에 차량이 접근로에 존재했음을 나타내며, 차량 ID 별로 가로축의 합은 개별 차량의 통행시간을, 시점별로 세로축의 합은 전체 차로의 차량 점유율을 나타낸다.
실측 데이터를 바탕으로 만들어낸 차량 점유율과 실제 영상 인식에 의한 차량 점유율을 비교하면 Figure 9와 같으며, A 시점에 궤적 기반의 차량 점유율과 차이가 나타난다. A 시점은 녹색 신호가 시작되어 많은 차량이 이동 중임에 따라 영상 인식의 정확도가 낮아지는 요인과 대형 차량으로 인해 후행 차량이 가려지는 문제로 발생하였다.
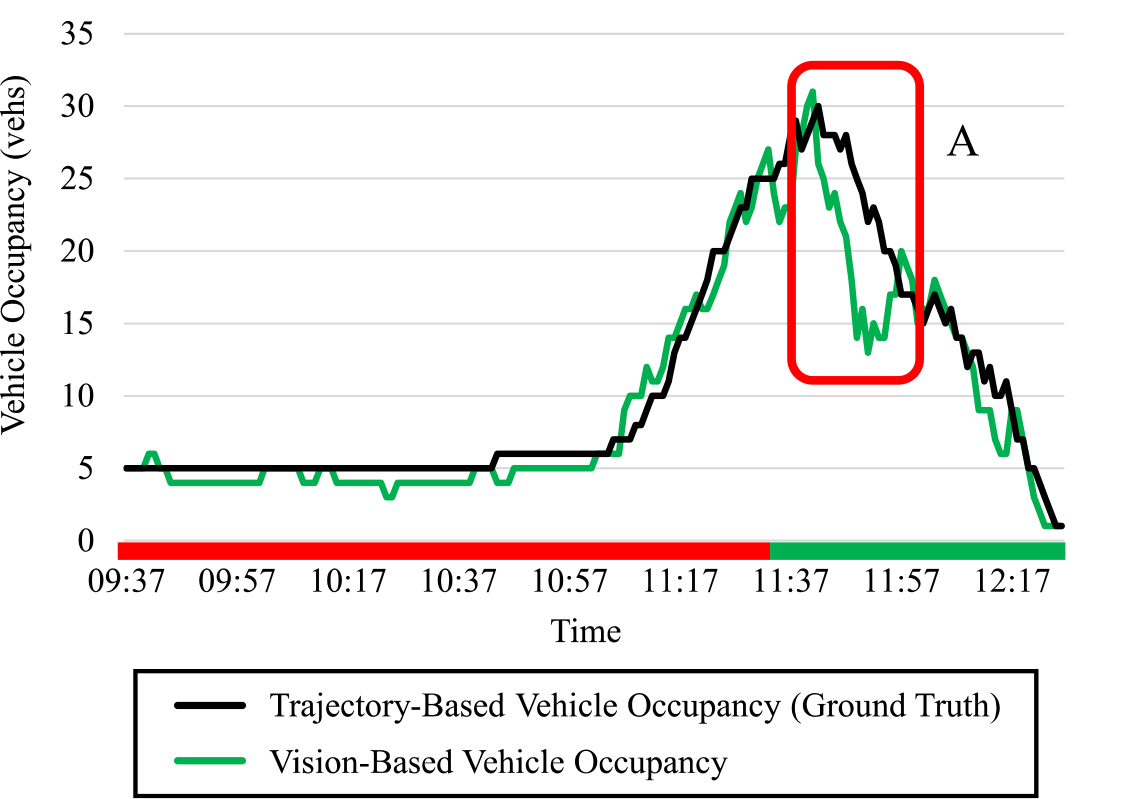
Table 4를 통해 실제 지체와 HCM 지체 산정식과 제안된 방법론을 비교하였다. 영상을 통해 분석한 3개 주기에서 제안된 방법론에 의한 지체 산정 결과가 HCM보다 높은 정확도를 나타냈지만, 실제 지체보다 과소 추정된 결과를 보인다. 그 원인은 앞서 언급한 Figure 9의 정확도 문제가 발생하며 인식된 차량 수가 실제보다 작아짐에 따라, 총 주행시간 산정이 과소 추정되었기 때문이다.
시뮬레이션 분석 환경 구축
본 연구에서 제안한 영상 기반 지체 산정 방법의 정확도를 다양한 교통량 환경에서 판단하기 위해 시뮬레이션 상의 교차로 환경에서 직진 이동류만을 고려하여 시뮬레이션의 개별 차량으로부터 직접적으로 산출된 지체 시간을 참값으로 두고, HCM 지체 모형을 통해 산정한 결과와 비교분석하였다. 분석 시뮬레이션으로는 SUMO를 사용하여 분석 대상 교차로와 상류부 교차로를 구축하였다. SUMO 내의 시뮬레이션 제어 모듈인 TRACI를 활용하여 영상 검지기 모사 모듈 프로그램을 생성하였고, 실제 영상 검지와 동일하게 작동시켜 검지 데이터를 생성하였다. 시뮬레이션 분석 시에는 실제 데이터와 달리 높은 인식 정확도를 가지고 있으나, Figure 10에 나타난 범위처럼 접근로 구간보다 짧은 영상 인식 거리를 설정하였다. 시뮬레이션 환경에 적용된 사항은 Table 5와 같다.
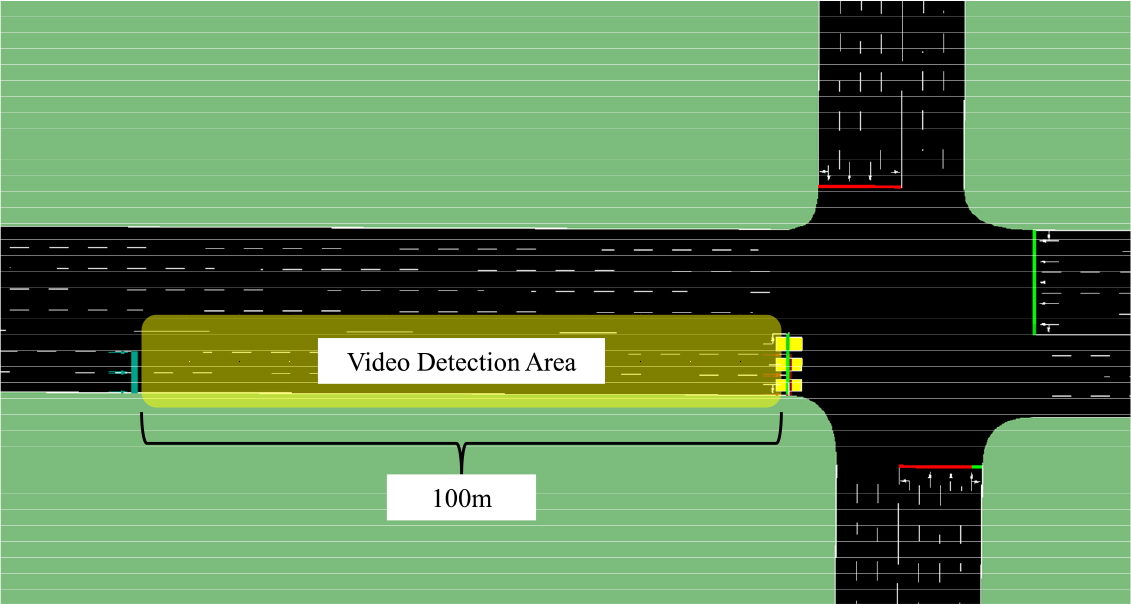
Table 5.
Parameters for simulation environment
발생한 교통량과 그에 따라 형성되는 대기행렬 길이에 대하여 방법론 적용 시 정확도를 분석하기 위하여 Table 6에 제시된 6가지 시나리오에 대해 시뮬레이션을 수행하였다. 각 시나리오는 동일한 신호 환경에서 낮은 교통량 수준으로부터 교통량을 증가시켜 다양한 포화도 환경을 구성하였다. 분석 교차로의 목표 포화도 수준과 상류부 교차로의 신호 비율에 따라 좌회전, 직진, 우회전으로 유입되는 교통량을 2,100초간 확률적으로 발생시켜 주기별로 불확실성이 존재하는 환경을 구현하였다. 전체 시뮬레이션 중 초기 시간 300초를 고려하여 1,800초 동안의 18개 주기에 대한 대상 교차로에서의 지체 산정 결과를 분석하였다.
Table 6.
Input traffic data of each scenario
시뮬레이션 분석 결과
시뮬레이션에 구축한 영상 검지 환경으로부터 생성된 데이터를 적용하여 15분 단위의 평균 지체 산정 결과와 주기별 평균 지체 산정 결과를 Table 7과 같이 비교하였다.
Table 7.
Result of each scenario

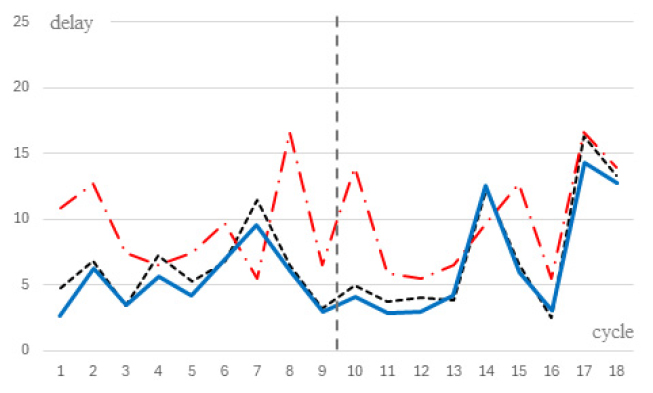
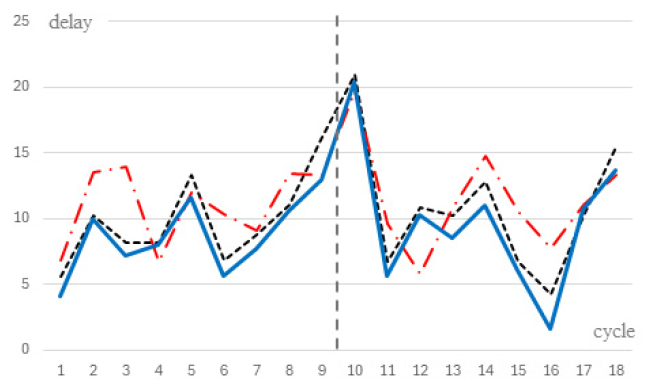
시나리오 1과 시나리오 2는 비포화 상황으로, 낮은 교통량 수준과 확률적인 차량 진입에 따라 차량들의 교차로 진입 시점이 크게 달라졌다. HCM의 경우, 교통량을 기반으로 균일한 차량의 흐름을 가정하여 실제 대기행렬의 형성을 충분히 반영하지 못하며 15분 단위의 평균 지체의 정확도가 낮게 나타났고, 주기별 평균 지체 오차가 크게 나타났다. 이에 반해 제안된 방법론을 적용 시, 영상을 통해 생성된 차량 점유율을 기반으로 차량의 교차로 진입 시점에 따라 형성되는 대기행렬의 양상을 반영하며 15분 단위 평균 지체가 더 높은 정확도를 보였고 주기별 지체 산정 결과의 차이가 낮게 나타났다.
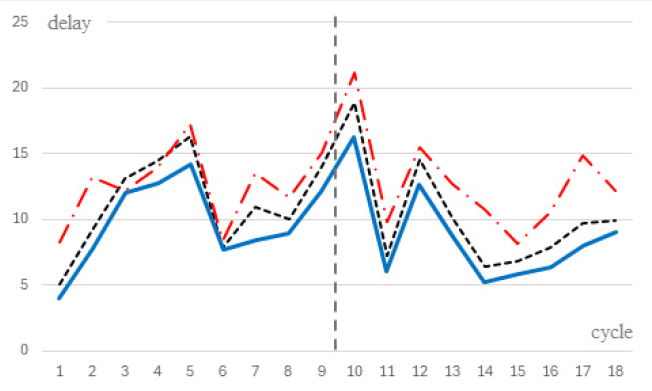
시나리오 3과 시나리오 4의 경우 근포화 상황에서 일정 수준의 교통량이 상류부 교차로의 신호에 의해 비교적 균일하게 진입하며 30분 단위의 평균 지체 산정 시 HCM의 정확도가 상승하였다. 그러나 주기 단위의 평균 지체 산정 시 주기별로 과대 추정된 결과와 과소 추정된 결과가 번갈아 나타나며 지체 변화의 추이를 따라가지 못하는 모습을 보였다. 이에 반해 제안된 방법론은 비포화 상황과 마찬가지로 안정적인 정확도를 보이며, 주기별 지체 산정 결과 또한 기준되는 SUMO 지체의 양상과 근접하게 나타내고 있다.
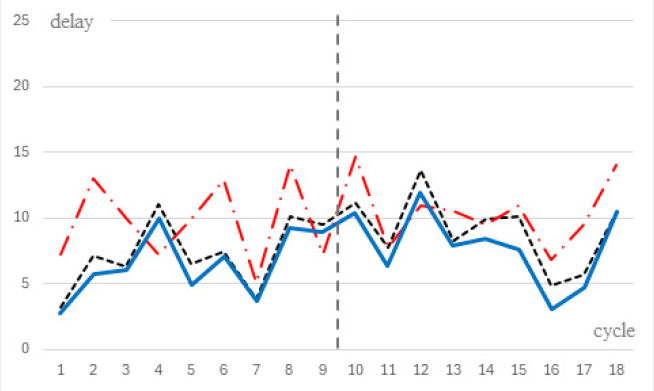
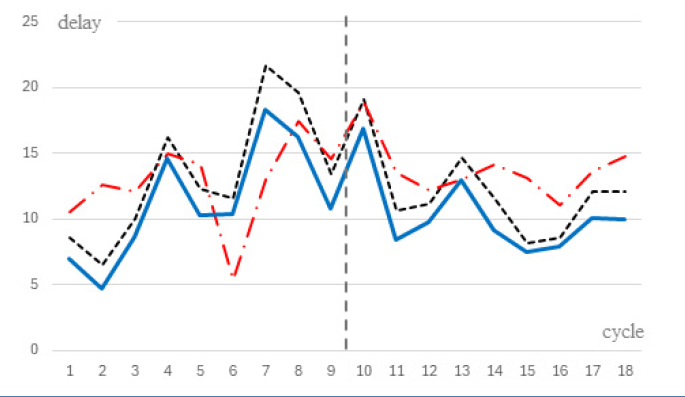
시나리오 5의 경우 15분 단위 평균 지체 산정 시 HCM의 정확도가 제안된 방법론에 비해 높은 정확도를 보인다. 이는 포화도가 증가함에 따라 교통량이 일정하게 진입하며 균일 도착 분포와 비슷한 환경이 만들어진 영향으로 판단된다. 그러나 여전히 주기 단위의 지체 산정 시, 높은 MAE 값이 나타나며 실제 지체가 형성되는 양상과 차이가 나타난다. 제안된 방법론의 15분 단위 평균 지체 산정 결과는 다른 시나리오들과 마찬가지로 준수한 정확도를 보였으며, 주기별 지체 산정 결과의 경우 과소 추정되는 경향이 나타나지만 평균 지체 시간의 추이를 잘 나타내고 있다.
HCM 방법은 차량 도착의 불확실성이 증가할수록 낮은 정확도를 보이고, 주기 단위의 지체 산정에는 불안정한 모습을 보인다. 이에 반해 제안된 방법론은 영상 검지기로부터의 차량 점유율을 통해 지체를 산정함에 따라, 차량의 도착 시점을 반영하여 15분 단위와 주기 단위의 지체 산정에서 안정적인 모습을 보이나, 전체적으로 과소 추정된 지체를 산출하는 경향이 있다. 이는 전체 접근로 길이 중 영상 검지 범위 내에서 발생한 지체만을 산출하게 되기 때문으로 판단된다.
결론 및 향후 연구
본 연구에서는 영상 검지 환경에서 수집되는 정보를 바탕으로 지체 산정 방법을 개발하였다. 신호교차로에 설치된 영상 인식 카메라를 기반으로 영상을 통해 수집된 매초 차량 점유율을 통해 교차로에 진입한 차량의 실제 움직임을 반영하였다. 특정 지역의 실측 데이터 및 미시적 시뮬레이션 프로그램인 SUMO를 통한 제한된 환경에서, 본 연구의 지체 산정 방법론을 적용하였을 때, HCM 지체 산정 방식보다 상대적으로 높은 정확도를 보였다. 시뮬레이션 분석 중 15분 단위의 지체 산정의 경우, 제안한 모델은 SUMO에서 직접 산출한 평균 지체에 대하여 16% 미만의 오차를 보였다. 주기 단위의 지체 산정 결과는 HCM 지체 산정 방법과 비교했을 때, 실제 지체의 추세를 본 연구의 방법론이 더 효과적으로 나타내는 것을 확인하였다. 이를 바탕으로 영상 내 개별 차량의 추적 없이 차량 점유율만을 통해 주기 단위의 지체 변화를 모니터링할 수 있게 함으로써 신호교차로의 효율적인 운영에 도움을 줄 수 있다.
본 연구의 한계로써 보완될 부분은 향후 연구 과제로 남긴다. 첫째, 영상 검지 시 정확도에 영향을 미치는 정보를 반영할 필요가 있다. 본 연구의 결과에서 확인된 오차는 영상 검지기가 가지는 검지 영역 외부에서 발생한 지체를 반영하지 못하여 발생하였거나, 이동 중인 차량에 대한 인식 정확도, 대형 차량 등에 의해 후행 차량을 인식하지 못함에 따라 전체적인 지체 산정 결과가 과소 추정되었다. 이를 반영하기 위하여 실제 구간 거리와 영상 인식 거리의 차이, 대형 차량 존재 비율에 따라 보정한다면 더욱 다양한 환경에서 정확한 지체 산정이 가능할 것으로 기대된다. 둘째, 본 연구에서는 범위를 직진 차량에 한정하였으나, 다른 이동류와 혼재된 환경에 적용할 필요성이 있다. 이 경우 좌회전 베이 이전의 직진과 좌회전 혼용 구간에 대한 차량 점유율의 처리에 대한 고려가 필요하다.
