

서론
기존문헌고찰
1. 고속도로 차로제어시스템(LCS) 운영 관련
2. 오르막차로 동적차로 운영 관련
3. 고속도로 안전성 평가 관련
4. 기존연구와의 차별성
방법론
1. 시뮬레이션 환경구현
1) 시나리오 구성
2) 대상구간 선정
3) 개별차량 제어방법
4) 정산(Calibration and Validation)
2. 교통안전성 평가 방법
1) 상충분석
2) 심각도분석
시뮬레이션 분석 및 평가
1. 시뮬레이션 구현
1) 시뮬레이션 수행방안
2) 정산결과
3) 속도 및 차두거리 분포
2. 분석결과
1) 상충건수
2) 상충심각도
3. 오르막차로 동적운영 알고리즘
결론 및 향후 연구
1. 결론
2. 향후연구 과제
서론
오르막차로는 오르막경사 구간에서 일반차량과 중차량의 주행성능의 상이함으로 인해 발생하는 운영효율성 저하를 개선하기 위한 시설이다. 초기 오르막차로는 저속 차량을 별도의 차로로 분리시켜 주행하도록 하는 포켓형으로 운영되었다(Kim et al, 2014). 오르막차로의 설치 의도에 따라 저속차량이 우측으로 차로를 변경하여 주행해야 하나, 운전자의 심리상 저속차량이 오르막차로가 아닌 본선에서 그대로 주행하여 고속차량의 주행을 방해하는 등 운영효율성 및 안전성의 문제로 2009년을 전후로 추월차로형으로 전환되었다. 그러나 추월차로형 오르막차로에서 사고건수 및 사망자수 증가로 인하여 다시 포켓형으로 전환하거나 추월차로 형태를 유지한 채 안전시설 등을 보완하는 방안에 대한 검토를 진행중이다(Ko, 2015).
또한, 주말 또는 명절과 같이 교통량이 증가하는 경우, 오히려 불필요한 분․합류로 인하여 운영효율성이 떨어지는 현상이 관측되었으며, 분․합류부에서 갑작스런 끼어들기로 인한 추돌사고가 증가하여, 안전성 측면에서도 문제가 제기되었다(Kim et al, 2014).
이처럼 기존에 설치된 오르막차로의 경우 일부는 교통정체 및 사고위험성 증가 등의 이유로 일시적으로 폐쇄하여 운영되고 있다. 하지만 오르막차로의 개방과 폐쇄를 결정하는 명확한 기준이 없이 운영되고 있어 이에 대한 연구의 필요성이 제기되고 있다. 오르막차로의 개․폐에 따른 운영효율성 측면에 대한 연구는 진행되어, 운영여부 판단 파라미터, 운영기준 등을 제시하고 있지만, 교통안전성을 고려한 운영 기준은 제시되어 있지 않다. 따라서 본 연구에서는 교통 안전성 측면에서의 오르막차로 운영 기준에 대한 분석을 진행하였다.
오르막차로의 교통 안전성 평가지표로 교통상충건수와 상충 심각도를 제시하였으며, 미시적 교통류 시뮬레이션을 이용하여 분석을 실시하였다. 교통상황을 반영하는 변수로 교통량과 중차량비율로 설정하여 시나리오를 구성하였으며, 각 시나리오별 개별차량 주행궤적을 수집하여 상충건수 및 상충 심각도를 도출하였다. 안전성 평가지표를 시나리오별로 비교․분석하여 오르막차로 개․폐 기준 및 탄력적 운영을 위한 알고리즘을 제시하였다.
본 연구의 구성은 다음과 같다. 2장에서는 고속도로 차로제어시스템 운영, 오르막차로 동적차로 운영, 고속도로 안전성 평가와 관련된 국내외 관련 문헌을 고찰하였다. 3장에서는 시뮬레이션 환경 구현 및 분석방법론에 대하여 소개하였으며, 4장에서는 시나리오별 분석결과 및 동적운영 알고리즘을 제시하였으며, 마지막 장에서는 결론을 제시하였다.
기존문헌고찰
1. 고속도로 차로제어시스템(LCS) 운영 관련
Lee et al.(2009)은 고속도로 정체 구간에 LCS(Lane Control System)차로 도입에 대한 효과를 현장조사를 통하여 연구하였다. LCS차로 도입 시, LCS차로 이용률 증가, 도로용량 증대, 평균통행속도 증가, 정체길이 감소, 통행시간 감소 등의 효과가 있는 것으로 분석되었다.
Schaefer et al.(1998)은 시뮬레이션을 이용하여 고속도로 LCS(Lane Control Signing)의 교통량과 운전자 순응도에 따른 운영효과에 대한 분석을 시행하였다. 교통량이 900vphpl 이하일 경우에는 LCS이 운영이 필요 없으나, 교통량이 증가할수록 운전자의 순응도 또한 높아져야 운영효율성이 증가하였다. 그러나 1300vphpl이상에서는 순응도에 관계없이 효과적이지 못하였다.
Mithilesh Jha et al.(1999)은 시뮬레이션을 이용하여 고속도로에서 사고가 발생하였을 경우, LCS(Lane Control Signals)의 영향력에 대한 분석을 엇갈림 구간과 램프상류부 구간을 대상으로 하였다. 구간 길이, 교통량과 차로이용 패턴, 순응도에 따른 LCS의 효과를 통행시간 및 지체 변화율로 평가하였다. 분석결과, 구간길이가 길수록, 엇갈림구간 구간의 경우 효과가 큰 것으로 나타났다.
2. 오르막차로 동적차로 운영 관련
Ko et al.(2012)은 오르막구간에서의 운영효율성측면에서의 동적차로운영의 필요성 및 기준을 제시하였다. 교통량비(v/c)와 중차량 구성비 등을 교통운영변수로 시뮬레이션 분석을 수행하였다. 분석결과, 오르막구간의 평균통행속도가 50kph일 때 오르막차로의 동적운영기준으로 적절하다고 제시하였다.
Choi et al.(2010)은 교통운영측면에서 교통량 및 중차량 구성비의 증가에 따른 오르막차로 일시 폐쇄가 혼잡감소에 미치는 영향을 시뮬레이션을 사용하여 분석하였다. 분석결과, 교통량과 중차량비가 오르막차로의 주요한 기준이 되며, 일반적인 소통상황에서 오르막차로 운영효과가 더 큰 것으로 분석되었다.
3. 고속도로 안전성 평가 관련
Kim et al.(2014)은 비교그룹방법(Comparison Group Method)을 활용하여 추월차로식 오르막차로의 설치 전‧후의 교통사고 자료에 대한 분석을 실시하였다. 분석결과, 추월차로식 오르막차로 구간은 교통사고 위험도가 2배 이상 증가하는 결과를 보였다.
Yoo et al.(2010)은 고속도로 영업소 진출부의 차량속도와 상충발생을 현장조사 및 비디오촬영을 통하여 고속도로 하이패스차로 안전성 개선에 관한 연구를 진행하였다. 분석 결과, 고속도로 영업소 중앙 하이패스 설치 시 하이패스 차량의 급감속 및 감속시간이 큼에 따라 사고위험이 높은 것으로 분석되었다.
4. 기존연구와의 차별성
기존의 고속도로 LCS 운영 및 오르막차로 관련 연구에서는 운영효율성 측면을 고려한 연구가 활발히 이루어져 왔으나, LCS 및 오르막차로와 관련하여 교통 안전성 측면을 고려한 운영기준에 대한 연구는 아직까지 찾아볼 수 없었다. 이에 오르막차로의 안전성 측면을 고려한 운영기준 수립 및 동적운영 알고리즘 개발을 하여 안전하고 효율적인 LCS 교통류 관리 전략을 수립하기 위한 기반을 마련한다는데 기존 연구와 차별성을 가진다. 연구 흐름은 Figure 1에 나타내었다.
먼저 교통 및 기하구조 조건을 고려하여 시뮬레이션 환경을 구현하고, 교통량과 중차량비율을 고려한 시나리오를 작성하였다. 그리고 오르막차로 주행 차량을 제어하기 위한 API를 개발하고, 현장에서 수집된 속도 자료와 시뮬레이션을 통하여 수집된 속도 자료를 이용하여 정산 및 검증과정을 수행하였다. 각각의 시뮬레이션 시나리오별로 수집된 차량의 주행궤적을 이용하여 상충건수와 상충심각도를 도출한 후, 오르막차로의 안전성을 분석하였다. 마지막으로 분석 결과를 활용하여 안전성을 고려한 오르막차로 운영 알고리즘을 제시하였다.
방법론
1. 시뮬레이션 환경구현
1) 시나리오 구성
실제 오르막차로 구간에서의 다양한 교통조건과 오르막차로 개방 및 폐쇄의 기하구조 변경을 적용하는 것은 현실적으로 불가하다. 따라서 본 연구에서는 미시적 교통류 시뮬레이션 프로그램인 VISSIM을 이용하여 분석을 진행하였다.
오르막차로에 유입되는 교통량은 도로용량편람(KHCM)에서 제시한 고속도로 기본구간 서비스 수준 LOS A-E를 고려하였다. LOS F의 경우 혼잡한 상황에서의 차량의 감속이나 막힘으로 인하여 안전성을 평가하는 것이 무의미할 것으로 판단되어 제외하였다. 교통량은 중차량 혼입율에 따라 중차량 보정계수를 적용하여 교통량을 반영하였으며, 중차량 보정계수는 대상구간의 오르막차로 구배 4%와 중차량에 대한 승용차 환산계수를 반영하여 적용하였다. 중차량의 혼입율은 40%이상 혼입 시 중차량에 대한 승용차 환산계수가 동일하게 적용되기 때문에 최대 50%까지 설정하였다. 마지막으로 오르막차로의 개방 및 폐쇄 여부에 따른 안전성을 비교하기 위한 시나리오도 구성하였다.
위의 조건에 따라 다양한 교통 및 기하구조 조건이 고려된 오르막차로 구간의 안전성 분석 시나리오를 Table 1과 같이 구성하였다.
2) 대상구간 선정
분석 대상구간은 오르막차로 운영 여부에 따른 효과를 평가할 수 있는 교통사고가 많이 발생하는 구간이며, 오르막차로 이외의 외부 영향을 받지 않도록 진출입구간 등 기하구조의 변경이 없는 구간으로 선정하였다.
2009-2012년 동안 발생한 교통사고 건수를 이용하여 교통사고율*1)을 산출한 결과, 중앙선 부산방향 단양IC-북단양IC 구간이 0.56으로 가장 높았으나, 오르막차로 구간 사이에 휴게소 진출입 구간이 존재하고 있었다. 따라서, 2번째로 사고율(0.51)이 높은 중앙선 춘천방향 단양IC-북단양IC구간 내의 오르막차로를 분석 대상구간으로 선정하였으며, 총 연장은 2.1km이며 종단경사는 4%이다**2). 분석구간은 인지반응거리***3)와 차로변경거리****4)를 고려하여 대상구간 앞뒤로 400m 연장하였다. 실제 시뮬레이션 구현 구간은 시뮬레이션 차량이 충분히 주행 후 분석구간에 진입할 수 있도록 고려하였으며, 또한 분석구간 통과 후 차량의 영향요인을 최소화하도록 앞뒤로 차로변경거리를 연장하여, 총 3.5km로 설정하였다. 대상구간 구성도를 Figure 2에 제시하였다.
3) 개별차량 제어방법
VISSIM에서는 개별 차량을 제어할 수 있도록 Com-Interface API 환경을 제공하고 있다. 실제 오르막차로 주행특성을 반영하기 위하여 시뮬레이션 차량 유형에 따른 차량제어 Com-API를 개발하였다. 본 연구에서는 차량 유형을 승용차와 중차량으로 구분하여 유형별로 제어하였으며 오르막차로 특성이 반영된 시뮬레이션 구현을 위한 차량 제어 조건은 다음과 같다.
▪ 승용차 : 오르막차로 주행 통제
▪ 중차량 : 추월차로인 본선 1차로 주행 통제
오르막차로 주행 시 추월 불가능, 주행속도 60kph이하인 경우 오르막차로 주행
설계속도가 80-100kph인 경우 중차량의 허용 최저속도는 60kph이며, 최저속도 이하로 주행하는 구간이 200m이상일 경우 오르막차로를 설치하도록 제시하고 있다(국토해양부, 2014). 따라서, 본 연구에서는 분석 대상구간은 설계속도가 100kph이므로 시점부에서 진입속도가 60kph 이하인 중차량을 오르막차로로 주행하도록 제어하였다. 반면, 60kph 이상인 중차량은 오르막차로의 진입을 제어하지 않았다.
4) 정산(Calibration and Validation)
미시적 교통류 시뮬레이션 프로그램을 이용한 분석은 실제 도로를 시뮬레이션 상에 가상의 도로로 구현하여, 분석 및 평가를 수행하는 것이기 때문에 시뮬레이션의 교통상황은 실제 교통상황을 반영할 수 있도록 모사되어야 한다. 따라서 미시적 교통류 시뮬레이션 프로그램을 이용하여 분석을 수행할 경우, 반드시 정산(Calibration) 및 검증(Validation) 과정이 필요하다.
본 연구에서는 실제 대상구간의 지점검지기와 같은 위치에 가상의 지점검지기를 시뮬레이션으로 구현한 도로위에 설치하여, 시뮬레이션의 지점 속도자료를 수집하였다. 분석대상 구간의 서비스 수준이 다양하게 변화 하는 2014년 9월 8일 추석기간에 수집된 자료를 사용하였다. 이날 수집된 교통량과 속도자료를 이용하여 서비스 수준별 대표 교통량과 대표 속도를 도출하였으며, 이를 시뮬레이션 입력교통량으로 사용하였다. 각 서비스 수준별 실제 대상구간의 지점검지기 속도와 시뮬레이션에서 수집된 속도자료를 비교하여 구현의 정확성을 검증하였으며, 정산 파라미터로 희망속도*****5)(Desire Speed)를 사용하였다. 이때 정산평가지표로 MAPE를 사용하였으며, Equation 1과 같다.
 (1)
(1)2. 교통안전성 평가 방법
본 연구에서는 시나리오를 평가하기 위한 교통안전 대체평가 지표(SSM: Surrogate Safety Measure)로 상충건수와 상충심각도를 제시하였다.
1) 상충분석
VISSIM에서 SD(Safety Distance)와 FD(Follow distance)를 얻어 차량간 상충건수를 도출하였다. SD는 차량추종모형에서 주체차량이 전방차량을 추종하는 동안 유지되어야하는 최소 안전거리이며, FD는 시뮬레이션에서 주체차량과 전방차량 간의 실제 측정된 거리이다. 따라서 상충은 SD가 FD보다 클 경우, 즉 안전을 위해 앞차와 유지해야하는 거리가 실제 앞차와의 거리보다 긴 경우를 의미한다. 상충건수 판단식은 식(2)와 같다.
 (2)
(2)본 연구에서는 시뮬레이션 구현하는 동안 매 1초 단위로 분석구간 내의 모든 차량에 대하여 상충여부를 판단하여 상충건수를 계산하였다.
2) 심각도분석
Delta S는 차량 상충이 발생할 때 차량간의 속도차로 사고의 심각도를 나타낼 수 있는 대체 평가지표이다. 본 연구에서는 Delta S(SD>FD)로 표현하여 상충심각도를 나타내는 대체 평가지표로 정의하였으며, Equation 3과 같다.
 (3)
(3) : 주체차량의 속도
: 주체차량의 속도 : 전방차량의 속도
: 전방차량의 속도예를 들어, Equation 3의  는 방향성을 가지는 벡터의 차를 나타내기 때문에 같은 방향으로 진행하는 두 차량의 속도가 같으면 Delta S(SD>FD) = 0이 되어 사고가 발생하지 않는 다고 해석할 수 있다. 그러나 반대방향으로 진행하는 두 차량의 속도가 같다면 Delta S(SD>FD) = 2V 가 되며, 상충발생시 상충 심각도가 높은 것으로 해석 할 수 있다.
는 방향성을 가지는 벡터의 차를 나타내기 때문에 같은 방향으로 진행하는 두 차량의 속도가 같으면 Delta S(SD>FD) = 0이 되어 사고가 발생하지 않는 다고 해석할 수 있다. 그러나 반대방향으로 진행하는 두 차량의 속도가 같다면 Delta S(SD>FD) = 2V 가 되며, 상충발생시 상충 심각도가 높은 것으로 해석 할 수 있다.
본 연구에서는 각 시나리오별 분석구간 내에서 매 1초단위로 상충판단시 발생되는 차량간 Delta S(SD>FD)의 평균을 산출하여 상충심각도를 도출하였다.
시뮬레이션 분석 및 평가
1. 시뮬레이션 구현
1) 시뮬레이션 수행방안
본 연구에서는 시뮬레이션을 통하여 개별차량의 주행궤적 자료를 추출하였다. 개별차량의 주행궤적 자료를 통하여 상충건수와 상충심각도를 각각 산출하였고 50개의 시나리오에 대하여 비교․분석을 수행하였다.
시뮬레이션 결과의 신뢰도를 높이기 위하여 50개의 시나리오에 대해 Random seed값(난수)을 다르게 적용하였다. 이 과정을 총 6회 반복 실시 후, 평균을 산출하여 분석을 실시하였다. 시뮬레이션의 분석시간은 1시간으로 설정하였으며 Warm-up time은 10분, Clearance time을 5분으로 설정하였다. 이는 시뮬레이션 상에 교통량이 고르게 분포되고 난 뒤에 분석을 수행해야 실제 도로환경을 반영하기 위해서이다.
2) 정산결과
현장에서 수집된 교통량과 속도자료를 이용하여 대표 교통량과 대표속도를 도출하였다. 현장 대표교통량은 시뮬레이션의 입력교통량으로 사용되었으며, 현장 대표 속도는 시뮬레이션에서 수집된 속도자료의 비교하여 정산결과를 검증하는데 사용되었다. 분석대상구간의 서비스 수준별 대표 교통량과 속도, 시뮬레이션에서 사용된 서비스 수준별 입력교통량과 수집속도는 Figure 3와 같다. 본 연구에서는 시뮬레이션 정산 파라미터로 희망속도(Desire Speed)를 사용하여 LOS A-E별로 각각 수행하였다. 정산 결과, Table 2와 같이 평균 MAPE 값이 1.40%로 시뮬레이션 환경이 실제 도로를 잘 구현하고 있으며, 차량의 상충건수, 상충심각도, 상충지점을 분석하는데 있어 충분한 신뢰성을 확보한 것으로 판단된다.
3) 속도 및 차두거리 분포
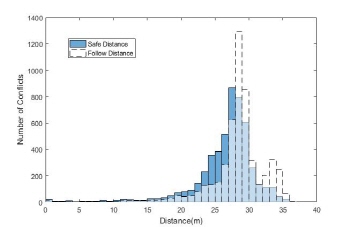
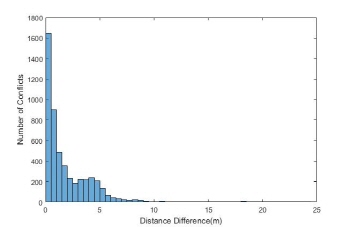
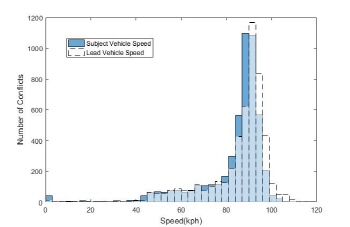
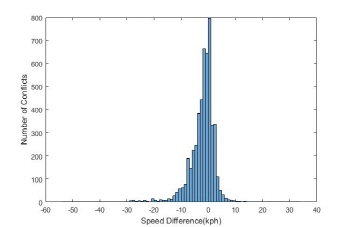
시뮬레이션에서 수집되는 SD와 FD를 이용하여 상충을 판단하였으며, 상충심각도는 상충판단시 두차량의 속도차이 중 가장 큰 값을 이용하였다. 상충심각도 및 상충판단을 위한 속도와 차두거리 분포는 시나리오 별로 다양하기에 서비스 수준 B, 중차량비율 20%일 때를 예시로 Figure 4, 5에 제시하였다. Figure 4의 (a)는 상충시 SD와 FD의 분포로 FD가 SD보다 큰 경향을 보이고 있으며, Figure 4의 (b)는 상충시 SD와 FD 차이의 분포로 그 차이가 대부분 5m 이내로 나타났다. Figure 5의 (a)는 상충시 두 차량의 속도의 분포를 나타내고 있으며, Figure 5의 (b)에 두 차량의 속도 차이의 분포를 나타내고 있으며 대부분 10kph 이내의 속도차이를 보였다.
2. 분석결과
1) 상충건수
오르막차로의 개․폐에 따른 오르막구간 위치 별 상충건수를 일반적인 상황인 LOS B와 혼잡한 상황인 LOS D에 대하여 비교하였으며, 분석결과를 Figure 6과 Figure 7에 제시하였다.
|
|
(a) Distance | (b) Distance Difference |
Figure 4. Distance distributions for conflict events | |
|
|
(a) Speed | (b) Speed Difference |
Figure 5. Speed distributions for conflict events | |
교통량이 적을 때(Figure 6)보다 교통량이 많은 경우(Figure 7), 상충건수가 증가함을 보였다. 특히 교통량이 적은 Figure 6의 경우, Figure 6-(a)의 오르막차로를 개방했을 때보다 Figure 6-(b)의 오르막차로를 폐쇄했을 때, 상충건수가 증가함을 보였다. 반대로 교통량이 많은 Figure 7의 경우, Figure 7-(b)의 오르막차로를 폐쇄했을 때보다 Figure 7-(a)의 오르막차로를 개방했을 때, 상충건수가 증가함을 보였다. 또한, Figure 6-(b), Figure 7-(b)와 같이 오르막차로를 폐쇄하였을 때는 교통량에 관계없이 비교적 고르게 상충이 발생하였으나, Figure 6-(a), Figure 7-(a)와 같이 오르막차로를 개방했을 경우에는 오르막차로의 시‧종점에서 상충건수가 상대적으로 많이 관측되었다.
오르막차로 구간에서 발생하는 상충건수가 교통량 증가의 영향을 받을 수 있다고 판단되어, 상충건수에 교통량을 나누어 줌으로서 차량 한 대당 발생하는 상충건수에 대하여 분석을 실시하였다. 그 결과, Figure 8과 Table 3에 제시한 바와 같이 LOS가 C이며 중차량 비율이 40%이상인 경우와 LOS D, E인 경우 상충건수가 급격히 증가함을 보였다. E의 경우, 교통류의 지나친 혼잡상태로 인하여 상충건수가 D의 경우보다 작게 나타남을 보였다. 따라서, 이 경우에는 오르막차로를 개방할 때보다 폐쇄할 때 상충건수가 낮아 교통안전성 측면에서 효과적인 것으로 판단되었다.
2) 상충심각도
상충심각도 평가지표인 Delta S(SD>FD)를 분석 시나리오 별로 산출한 결과, Figure 9와 같이 오르막차로 운영 여부와 관계없이 교통량이 적을수록, 중차량 비율은 높아질수록 상충심각도는 증가하는 경향을 보였다. 또한 오르막차로를 폐쇄했을 때와 개방했을 때의 차이를 Table 3에 제시하였다. 여기에서 ∆Delta S(SD>FD)는 오르막차로 폐쇄시 Delta S(SD>FD)와 운영시 Delta S(SD>FD)의 차이로, 0이상인 경우는 오르막차로 폐쇄시 상충심각도가 증가하며, 0이하인 경우는 오르막차로 개방시 상충심각도가 증가한다는 것이다. 예를 들어, LOS A이며 중차량 비율이 50%이상일 때 ∆Delta S(SD>FD) 값이 –0.77인데, 이는 오르막차로를 개방시 차량간 상대속도가 0.77kph 증가 하는 것으로 충돌 에너지가 증가한 것으로 해석할 수 있다. 즉, 0이상인 경우는 오르막차로를 개방해야하며, 0이하인 경우는 오르막차로를 폐쇄하는 것이 상충심각도 측면에서 안정성 효과가 높은 것으로 판단할 수 있다.
|
|
(a) Climbing lane closure | (b) Climbing lane open |
Figure 8. Analysis of conflict frequency | |
|
|
(a) Climbing lane closure | (b) Climbing lane open |
Figure 9. Analysis of conflict severity | |


3. 오르막차로 동적운영 알고리즘
다양한 교통조건에 따른 시나리오별 교통 상충건수 분석과 상충심각도 분석을 실시하였으며, 그 결과를 Table 3에 제시하였다. 교통 상충건수 결과에 따라 대각선 빗금쳐진 부분의 교통조건일 경우와 상충심각도 결과에 따라 음영 부분의 교통조건일 경우에 오르막차로를 폐쇄하는 것이 안전성을 향상시킨다. 보다 안전한 오르막차로 운영을 위해서 두가지 조건 중 어느 하나에 해당하더라도 오르막차로를 폐쇄하도록 운영할 필요가 있다고 판단되었다. 따라서, 본 연구에서 제시한 오르막차로 운영여부 기준이 적용된 동적운영 알고리즘을 Figure 10에 제시하였다. 먼저, 지점검지기에서 수집된 교통 자료를 통하여 서비스 수준과 중차량 비율을 추정한다. 그리고 교통량이 증가하고 중차량비율이 증가하면 상충건수 역시 증가한다고 추정되기 때문에 오르막차로를 폐쇄한다. 그리고 교통류 흐름이 좋으면서(LOS A) 중차량의 비율이 높을 경우에 상충 심각도가 높아지는 것으로 추정되기 때문에 이 역시 오르막차로를 폐쇄한다. 기존의 운영효율성 측면을 고려한 오르막차로 운영기준에 대한 연구와 비교한 결과를 Figure 11에 제시하였다. Choi et al.(2010)는 LOS D일 때 중차량 비율이 50%이상인 경우와 LOS E일 때 오르막차로를 폐쇄하는 것이 운영효율성을 높이는 것으로 분석하였다.
 (unit: Number of conflict per vehicle)
(unit: Number of conflict per vehicle) (unit: kilometer per hour)
(unit: kilometer per hour)
이와 유사하게 Ko et al.(2012)는 LOS D일 때 중차량 비율이 50%이상인 경우와 LOS E이며 중차량 비율이 20%이상 일 때 오로막차로를 폐쇄하는 것이 운영효율성을 높이는 것으로 분석하였다. 본 연구에서 제시한 기준과 비교하였을 때, Figure 11과 같이 안전성 측면에서의 오르막차로를 폐쇄해야 하는 것으로 판단된 부분이 운영효율성 측면에서는 개방되어야 하는 부분으로 운영판단 기준이 상반되는 것으로 나타났다. 따라서 오르막차로 운영기준에 운영효율성 측면이 아닌 안전성측면을 고려한다면 폐쇄기준이 확대되어야 한다. 특히, 통행속도가 높으나 중차량 비율이 높은 경우 상충심각도가 높아져 심각한 사고가 발생할 가능성이 높아지기 때문에, 이러한 교통조건에서는 오르막차로를 폐쇄해야하는 것으로 판단된다. 그러나, 무작정 안전성 측면만을 고려하여 운영기준을 판단하기에는 운영효율성 측면 또한 중요하기에 안된다. 따라서, 교통 안전성 측면과 운영효율성 측면을 모두 고려할 수 있는 최적의 오르막차로 운영기준에 대한 연구가 필요할 것으로 판단된다.
결론 및 향후 연구
오르막차로 구간에서 교통량과 중차량 비율이 증가할수록 교통운영효율성이 저하되고, 교통사고가 많이 발생하여 교통안전성 측면에서 문제가 되고 있다. 이에 따라 오르막차로를 일시적으로 폐쇄하여 운영하고 있지만, 명확한 기준이 없는 실정이다. 기존의 연구는 교통운영 측면에서 오르막차로 동적운영기준을 제시하고 있으나, 교통안전 측면에서는 제시된 바가 없는 실정이다. 따라서 본 연구는 교통 안전성을 고려한 오르막차로 운영기준 수립 및 운영 알고리즘을 개발하고자 하였다.
중앙선 춘천방향 단양IC-북단양IC 구간의 오르막차로를 선정하여, v/c비와 중차량 비율에 따른 시나리오를 설정하였다. 미시적 교통시뮬레이션인 VISSIM을 이용하여 분석을 수행하였으며, 다양한 교통조건 및 오르막차로 개․폐여부에 따른 교통 안전성 평가를 위한 지표로 상충건수와 상충심각도를 사용하였다.
본 연구에서 선정한 효과평가지표의 신뢰성 확보를 위하여 실제구간에서 수집된 자료를 이용하여 현실과 유사하도록 구현 및 검증하였다. 그 결과, MAPE가 0.45-4.28%로 현실을 제대로 반영하며 지표의 신뢰성 또한 충분하다고 판단하였다.
상충건수 분석결과, 중차량 비율이 LOS가 C이며 중차량 비율이 40%이상인 경우와 LOS D, E인 경우 오르막차로를 폐쇄하고, 상충심각도 분석결과, LOS A이며 중차량 비율이 50%이상일 때 오르막차로를 폐쇄하는 것이 교통 안전측면에서 효과적인 것으로 분석되었다. 이를 바탕으로 교통 안전성 측면을 고려한 오르막차로 개․폐 기준 및 탄력적 운영을 위한 알고리즘을 제시하였다.
본 연구결과를 활용할 경우, 기존의 운영효율성 측면만 고려한 연구와 달리 오르막차로 동적운영기준의 안전성 측면을 고려한 운영이 가능할 것이며, 이에 따라 교통사고 감소 효과도 기대할 수 있을 것이다. 또한 LCS의 경우도 운영효율성 측면만 고려된 연구가 진행되었는데, 갓길차로, 공사구간관리 등 LCS 운영시 안전성 측면을 고려한 전략적 운영 또한 가능 할 것으로 판단된다.
그러나 본 연구를 발전시키기 위해서는 다음의 사항에 대한 추가 연구가 필요하다.
첫째, 본 연구에서는 교통안전성 측면을 고려하여 오르막차로 동적운영 기준을 수립하였다. 오르막차로에 대하여 안전성 측면을 연구한 사례를 찾아볼 수 없는 점을 고려하면 충분히 가치가 있다고 판단되나, 좀 더 객관적이고 신뢰성 있는 오르막차로 동적운영 기준 수립을 위해서는 반드시 운영효율성 측면도 함께 고려되어야 될 것이다. 따라서 교통 안전성 측면과 운영효율성 측면을 모두 고려한 최적의 오르막차로 운영기준에 대한 연구가 필요할 것으로 판단된다.
둘째, 시뮬레이션 시간을 한 시간으로 설정하여 서비스 수준별로 분석을 수행하였다. 이는 실제 오르막차로 구간에서의 교통상황을 반영하기엔 분석시간이 짧아 재현수준의 한계가 있다. 또한, 교통조건은 시간에 따라 변화하는데 대표 교통량을 입력자료로 사용하였기에 현실을 정확히 반영하기에는 한계가 있다. 따라서 향후 연구에는 재현수준의 신뢰성 향상을 위하여 분석시간을 보다 늘리고 입력 교통량은 시간대별로 변화하도록 설정하여 보다 현실성 있게 시뮬레이션을 구현할 필요가 있다.
셋째, 실제 오르막차로의 길이와 구배에 따라 속도의 변화가 다양하게 나타난다. 그러나 본 연구에서는 단일 구간을 대상으로 시뮬레이션을 수행하였기 때문에 이러한 기하구조적 환경 변화에 따른 상충분석이 부족하다. 따라서 다양한 기하구조 환경을 고려한 시나리오작성 및 분석을 진행한 후, 알고리즘을 발전시킬 필요가 있다.
넷째, 시뮬레이션 분석결과는 상대적인 비교ㆍ분석이 가능하나 보다 신뢰성 높은 분석결과를 도출하기 위해서는 정산 및 검증과정이 반드시 필요하다. 본 연구에서는 시뮬레이션 연구결과의 신뢰성 확보를 위하여 지점검지기를 통해 수집된 자료로 시뮬레이션 정산 및 검증 과정을 수행하였다. 보다 객관적인 결과를 도출하기 위해서는 현장에서 수집된 개별차량 주행궤적 자료를 활용하여 정산 및 검증 과정을 수행할 필요가 있다.
마지막으로 본 연구에서는 시뮬레이션 도로 환경에서 개별차량 주행궤적을 수집하여 상충건수 및 상충심각도를 이용한 교통 안전성 분석을 수행하였다. 아직까지 현실에서는 지점검지기 기반의 자료만 수집이 가능하기 때문에 시뮬레이션 분석결과를 현실에 적용하기엔 한계가 있다. 따라서 이러한 수집자료에 대한 한계를 극복하기 위한 방안이 필요하다. 현재 영상검지기 기반의 차량주행궤적 자료를 수집하는 연구가 활발히 진행 중이기 때문에 향후 이를 활용하여 오르막차로 구간의 차량주행궤적 자료를 수집할 수 있을 것으로 판단된다. 따라서 현장에서 수집된 차량주행궤적자료와 시뮬레이션에서 수집된 차량주행궤적자료를 이용하여 상충건수 및 상충심각도에 대한 비교분석이 수행된다면 보다 현실성 있는 분석결과를 얻을 수 있을 것이다.
*) 교통사고율 : [(1,000,000)ⅹ분석기간 교통사고건수]/[365ⅹ분석기간ⅹAADTⅹ구간연장]
**) 중앙선 춘천방향 단양IC-북단양IC구간 오르막차로 이정 : 255.9-258.0(km)
***) 인지반응거리 = 설계속도 인지반응시간(4s)
인지반응시간(4s)
****) 차로변경거리 = 설계속도 차로변경시간(10s)
차로변경시간(10s)
*****) Vissim의 운전자 Behavior 파라미터중 하나
