

서론
선행연구 고찰
1. 운전과 운전자 정의에서 바라보는 자율주행자동차 이슈
2. 자율주행자동차 기술수준에 따른 운전면허
3. 자율주행자동차 관련 수용성
연구방법
1. 가설모형
2. 자료수집
3. 변수의 정의
분석결과
1. 자료의 타당도
2. 가설모형의 검정
3. MIMIC 모형 해석
결론
서론
자동차의 자동화기술이 세계적으로 활발하게 진행되어, 현재 자동화 레벨2 또는 레벨31)의 부분자율주행이 상용화되어 일부 서비스 되고 있다(Samjong KPMG, 2020). 또한, 고도 자율주행자동차 기술의 보급 및 확산을 목표로 지난 3월 산업통상자원부와 과학기술정보통신부, 국토교통부, 경찰청 등 4개 부처가 자율주행기술개발혁신사업단을 출범시켜 레벨4 이상의 상용화를 앞당기기 위해 노력하고 있다.
고도화된 자율주행자동차(레벨4/5)의 도입은 교통사고 감소와 같은 안전 향상, 고령자 및 장애인과 같은 교통약자에 대한 모빌리티 향상, 자동차 제조의 경쟁력 제고 등 사회 경제적으로 막대한 편익을 가져다줄 것으로 예상하고 있다(Taeihagh and Lim, 2019). 그러나 자율주행 차량(레벨4/5)은 사람이 아닌 자율주행시스템2)이 운전 주체가 됨에 따라 운전자를 사람에 한정한 현행 체계와의 불일치 문제가 떠오르고 있다(Kim and Park, 2020).
자율주행차량의 상용화는 곧 공공도로에서의 주행이 본격적으로 실시되는 것을 의미하며 자율주행차량으로 인한 도로교통의 위험과 장애 요소를 방지하기 위해 무엇보다도 도로교통법의 개정이 반드시 필요하다(Kim, 2018b). 특히, 자율주행자동차(레벨4/5)는 운전 주체가 사람이 아닌 자율주행시스템으로, 도로교통 환경과 조화롭게 스며들 수 있는 능력(예를 들어, 도로교통법 준수와 사람운전자와 소통, 그리고 형사적 책임)을 갖추어야 한다. 자율주행자동차가 공공도로 상에서 주행하기 위해서는 이용자인 국민들과 조화롭게 스며들 수 있는 능력에 대한 합의가 형성되고 폭넓게 수용될 수 있어야 한다. 그러나 사고 예방과 발생 시 안전을 담보할 수 있는 자율주행시스템 대상으로 한 법 ‧ 제도의 정비와 형사 책임 방식은 아직 명확하게 정의되어있지 않다.
운전면허는 도로 주행 시 법규의 준수 능력뿐만 아니라 형사 책임 규정과 연관된다는 점에서 자율주행시스템의 운전면허 도입에 대한 수용성 및 합의에 대해 검토되어야 할 필요성이 있다. 따라서 본 연구는 대중 관점에서 자율주행시스템의 운전 면허제도에 관한 수용성을 논의하고자 한다.
선행연구 고찰
1. 운전과 운전자 정의에서 바라보는 자율주행자동차 이슈
자율주행자동차에 대해 논의하기 위해서는 먼저 운전자의 정의와 운전면허에 대한 개념 정립이 필요하다. 현행 도로교통법에서는 명시적으로 ‘운전자’가 사람으로 규정되어 있지 않지만 도로교통법 제2조 제27호의 ‘초보운전자’의 정의와 벌칙에 대한 규정에서 그 대상이 ‘사람’을 지칭함을 알 수 있다(Kim, 2016b).
국제 규약에 의해 자동차의 운전자는 일정 수준 이상의 운전기능과 교통규칙을 준수할 수 있는 능력을 갖춘 자에게만 운전을 할 수 있도록 하고 있다(UNECE, 1968; UNECE WP.29, 2016). 이는 세계적으로 도로교통법으로 정한 운전면허를 구비한 운전자에 대한 인적 규제를 하는 것으로 운전면허제도에 근거하여 운전자에게 교통규칙 준수 의무를 부과하고 이를 위반한 경우 운전자에게 벌칙을 강제하고 있다. 따라서 자율주행자동차가 도로 상을 운행하는 경우 운전자의 정의에 대해 법적인 문제가 발생한다(Kim and Kim, 2021).
자율주행자동차는 “운전자 조작 없이 스스로 운행하는 것”으로 정의되어 있고, 이는 구체적으로 자동차 제어 소프트웨어 등을 포함한 자율주행시스템에 대해 운전자 개념으로 대체할 수 있는지에 대한 문제를 제기하고 있다(Bradshaw-Martin and Easton, 2014). 운전면허제도는 운전면허 부여를 통하여 면허자에게 운전이라는 이익을 부여하고 각종 행위 제한이라는 교통규칙 준수 의무를 부과하고, 이를 위반한 경우 벌칙으로 강제하는 구조로 되어 있다. 특히 면허 없는 자의 운전을 금지하는 이유는 사람의 생명과 재산을 침해하는 문제가 높기 때문이다(Hwang and Lee, 2016). 따라서 자율주행자동차의 운전과 운전자에 대한 규제가 필요하며, 규제 방법은 도로교통법에 근거한 운전면허 제도와 자동차관리법에 근거한 자동차 등록요건으로 논의 중에 있다(Lee and Kim, 2015).
2. 자율주행자동차 기술수준에 따른 운전면허
레벨3의 부분자율자동차에 대해서는 일부의 상황이나 조건 하에서 자율주행시스템에 의존한다고 하더라도 비상시에는 결국 운전자의 운전이 필요하다. 레벨3의 자율주행자동차는 현행 운전과는 조금 다르다고 해도 면허를 부여하는 것에 대해서는 법리적으로 문제가 되지 않는다(Lee, 2017b; Kim, 2018b). 또한 긴급 상황에서 운전자 개입을 필요로 하고 자율주행자동차의 운행 및 조작은 결국 사람에 의하여 이루어진다는 것을 고려하였을 때 면허 부여의 필요성이 존재한다(Kim, 2016b, 2017, 2020).
하지만 자율주행자동차 레벨4 부터는 운전의 주체가 사람이 아닌 자율주행시스템이 해당되므로 현행 운전면허체계는 운전자를 사람으로 전제한 인적 규제라는 점에서 도로 위에서 자율주행자동차의 운행을 어떻게 규제하여야 하는가에 대해 논란이 될 수 있다. 이런 이슈와 관련하여 Kim(2016c)은 자율주행자동차의 운행을 위해서는 운전면허제도의 근본적인 변화가 필요함을 지적하였고, Kim(2016a)도 자율주행자동차의 운행에서 운전면허 제도가 그대로 적용될 수 있는지에 대한 검토가 필요함을 지적하고 있다. Kim(2016a)은 특히 교통약자들이 수동운전이 아닌 자율주행시스템을 이용한 운전을 전제로 안전한 개인교통으로 활용할 수 있도록 운전면허 제도 정비를 주장하였다. Kim(2018b)는 자율주행자동차에 관련한 운전면허는 부분자율주행자동차와 완전자율주행자동차로 나누어 접근해야 함을 주장하고, 이에 따라 운전의 행위를 수행하는 주체가 달라지기 때문에 도로교통법에 근거한 운전면허를 사람에게 줄 것인지 또는 자율주행시스템에게 줄 것인지에 대한 논의를 전개하였다. 부분자율주행자동차의 경우 운전자의 개입이 필요하므로 운전면허 취득이 필요한 것은 분명함을 주장하면서도, 완전자율주행자동차의 경우에 인간이 운전 행위로부터는 해방될 수 있으나 자율주행자동차를 이용 혹은 운행하기 위한 면허는 필요하다고 주장하고 있다. 뿐만 아니라 자율주행시스템에게 운전자 요소가 존재하기 때문에 주행 중 발생하는 사건에 대한 대응, 교통법규 준수 등 규범 준수에 필요한 판단적인 조작이 가능한 평가가 필요하지만, 면허의 법률적 정의를 고려하였을 때 면허라는 표현을 사용하는 것은 적절하지 않을 수 있음을 지적하고 있다.
또한 Kim(2020)은 도로교통법의 운전면허 규정이 자동차의 사용 조작 행위만을 평가하는 것이 아니라 도로교통법 준수능력을 함께 평가하고 있는 바, 자율주행자동차에게도 운전면허를 부여할 필요가 있음을 주장하고 있다. 또한 자율주행자동차 역시 운전자와는 별개로 주행 중 도로교통법 준수 의무가 있어야 함을 지적하고, 위반 시 처벌과 관련한 사항의 정립이 필요함을 주장하였다. 도로교통법상 준수와 관련한 사항은 형사 처벌과 관련된 사항이 존재하지만 자율주행자동차는 자연인이 아니므로 이를 그대로 적용하기 어렵기 때문에 이에 대한 대안이 필요함을 제시하였다. 이는, 자율주행자동차에게도 운전을 담당하고 있는 자율주행시스템 대상으로 면허와 같이 법규 준수 능력에 대한 시험을 통해 자격을 부여할 필요성을 주장한 것이라고 생각할 수 있다.
자율주행차의 운전면허에 대한 국제표준은 정해져 있지 않지만 도로교통통행규칙을 논의하고 개정하는 국제연합 유럽경제이사회(UNECE)의 실무그룹(이하, WP.1)에서는 자율주행시스템에 의한 자율주행자동차의 운행을 가능하게 하기 위한 논의를 진행하고 있다. WP.1에서는 자율주행자동차의 운행에 대응하기 위한 국제협약의 개정 논의를 꾸준히 진행하고 있다. 기존 비엔나 및 제네바 국제협약 제8조에서는 모든 자동차는 언제든지 차량을 통제할 수 있는 운전자의 탑승을 요구하고 있다(Park, 2020). 자율주행자동차의 운행을 허용하기 위해 “누가 운전자인가”, “누가 차량을 통제하고 있는가” 등의 내용이 개정되어야 할 필요가 있으며, 이미 일부 내용이 개정되었거나 제정 또는 개정될 것이므로 국내 도로교통법에도 영향을 줄 것으로 예상된다. 특히 2014년에 개정된 비엔나 협약 제8조5항의2에서는 국제법적 문서(WP.29에 의한 기술기준)의 기준에 따르는 경우 자율주행시스템을 운전자로 간주할 수 있음을 규정하고 있어 자율주행시스템에 대한 운전자 지위 인정에 대한 논의가 상당히 진행되어있음을 알 수 있다. 제네바 협약(Park, 2020)과 비엔나협약(Lee and Hwang, 2017; Kim, 2018a)에서의 자율주행자동차 관련 개정 논의, 국내동향과 국내 도로교통법 관련 논점은 Korea National University of Transportation(2021)에 제시되어 있다. 운전자의 정의에 관한 논의와 함께 운전 외 행위 허용에 관해서도 WP.1(UNECE WP.1, 2020a; 2020b)에서 논의가 이루어지고 있으며 자율주행자동차의 자율주행시스템 운전에 따른 사람 운전자의 운전행위 이외 행동을 허용하는 주의의무 완화방안을 2022년 3월에 공표할 예정이다(UNECE WP.1, 2021a; 2021b; 2021c). 또한 WP.29(World Forum for Harmonisation of Vehicle Regulation: 차량 규칙의 통일화를 위한 세계 포럼)에서는 자율주행자동차의 상용화를 위한 각종 기술규칙에 대한 논의가 주로 이루어지고 있으며(UNECE WP.29, 2019; 2021a; 2021b; 2021c; 2021d) 자율주행자동차 관련 기술규칙을 발전시키기 위한 기초 원칙을 마련하기 위하여 2019년 “자율 차량 프레임워크 문서”를 2019년에 채택하였다(Park, 2020). 또한 2020년 6월 WP.29는 운전자의 추가 명령 없이도 장기간 동안 차량의 횡적 ‧ 종적 이동을 통제하는 자동차로유지시스템에 대한 규칙인 “UN 자동차로유지시스템규칙”을 채택하였고, 이는 자동차로유지시스템과 관련한 차량 형식 승인에 관한 단일 규정을 수립하고자 만들어졌다. 이 규칙은 레벨 3 자율주행자동차의 형식 승인을 위한 최초의 구속력 있는 국제 규칙이라는 점에서 의의를 가지며, 2021년 1월 발효되었다(Park, 2020). 국제협약과 국제기술규칙에 대한 논의는 향후 국내 관련법과 체계에도 영향을 줄 것이므로 국내법과 체계의 제 ‧ 개정 시에도 상기 논점에 대하여 논의가 이루어질 것으로 예상할 수 있다.
3. 자율주행자동차 관련 수용성
자율주행자동차의 수용성에 관한 연구는 기술수용모델(Technology Acceptance Model, TAM) 기반의 이론적 연구들(e.g., Davis, 1989; Venkatesh et al., 2003; Adell, 2009; Lee et al., 2018; Panagiotopoulos and Dimitrakopoulos, 2018; Shin, 2020; Zhang et al., 2020)이 자율주행자동차의 이용 경험에 근거한 기술수용성(Madigan et al., 2016, 2017; Cho et al., 2017; Kapser and Abdelrahman, 2020; Bernhard et al., 2020)과 자율주행자동차의 기술수준별 구매의향 연구 등의 실증적 연구(Yang, 2018; Lee, 2019; Hewitt et al., 2019)로 이어지고 있다.
TAM은 정보기술의 수용과정을 설명하는 이론으로서 기술수용에 대한 사람들의 행동의도는 지각된 유용성과 지각된 용이성에 의해 결정되고, 행위의도에 대한 외부적인 변수들의 영향이 지각된 유용성과 지각된 용이성에 의해 매개된다(Davis, 1989). 이후 많은 연구자들(Venkatesh et al., 2003; Yang, 2018; Lee, 2019; Hewitt et al., 2019; Shin, 2020)은 TAM을 포함한 외부 변수들과 구성요소를 통합한 UTAUT(Unified Theory of Acceptance and User of Technology)모델을 적용하였다. 한편 CTAM(Car Technology Acceptance Model)은 UTAUT 모델을 수정 및 확장한 것으로 자동차 내에서의 정보기술 수용성을 측정하는 모델이다(Osswald et al., 2012). 이 연구는 대부분의 TAM이 성공적인 기술정보 구현에 초점이 맞춰져 있으며, 외부 상황을 고려한 요인들이 무시되고 있는 점을 지적하면서 차량 내 기술의 운전자 수용성을 설명하기 위해 기존 UTAUT 모델에 Perceived Safety와 Anxiety, Self-Efficacy, Attitude Towards Using Technology를 추가한 모델로 발전하였다.
Nordhoff et al.(2016)의 연구는 자동화 차량이 대중에게 공개되는 방식이 차량이 수용되고 사용되는 범위에 영향을 미칠 것임을 주장하고 있다. 실증연구 중 프랑스의 라로셸과 스위스 로잔에서 시범 운행 중인 자율주행셔틀시스템(City Mobil2) 대상으로 한 연구에서는 UTAUT 모델에 따른 수용성 분석 성과기대, 노력기대, 사회적 영향력을 독립변수로 설정하였다(Madigan et al., 2016). 또한 Madigan et al.(2017)은 그리스에서 운행되는 CityMobil2를 대상으로 2016년의 UTAUT 모델을 확장하여 수용성 분석을 실시하고, 사회적 영향력과 함께 촉진 조건과 오락적 동기(Hedonic Motivation)를 독립변수로 추가하였다. 또한 Kapser and Abdelrahman(2020)은 독일의 자율주행배달차량을 대상으로 확장된 UTAUT 모델을 사용하여 수용성 분석을 실시하였으며 Madigan et al.(2017)에서 설정된 다섯 가지 독립변수에 가격 민감도(Price Sensitivity)와 인지된 위험(Perceived Risk)을 추가하였다.
자율주행자동차의 기술수준별 구매의향 연구 등의 실증적 연구에서는 국내 소비자를 대상으로 UTAUT 모델(Yang, 2018)을 이용해 오락성과 안전성을 독립변수로 하고 성과기대와 노력기대, 촉진조건, 사회적 영향, 가격가치를 매개변수로 설정하여 분석한 결과, 사용자 수용의도에서 오락성 요인이 촉진 조건으로 가장 많은 영향을 미치는 것으로 나타났으나 안전성에 대해서는 사회적 영향이 높은 경우 부정적 영향을 미치는 것으로 나타났다. 또한 Lee(2019)는 UTAUT를 확장하여 성과기대와 노력기대, 촉진조건, 사회적 영향에 불안감, 비용, 개인의 혁신성을 추가하였다. 마지막으로 Hewitt et al.(2019)은 UTAUT와 CTAM을 결합한 자율주행자동차 수용성 모델(AVAM: Autonomous Vehicle Acceptance Model)을 제안하였으며 성과기대, 노력기대, 사회적 영향력, 촉진조건, 기술사용에 대한 태도, 자기효용성, 불안감, 인지된 안전성을 독립변수로 설정하였다. Lee et al.(2018)은 자율주행자동차를 부분자율주행자동차와 완전자율주행자동차로 나누고, 각 분류에 따른 자율주행자동차의 수용에 영향을 미치는 요인 분석을 CTAM에 의해 수행하였고, 인지된 안전성, 노력 기대, 불안감, 기술사용에 대한 태도, 운전교육, 환경적합성, 차량유지비용으로 독립변수를 구성하였다.
연구방법
1. 가설모형
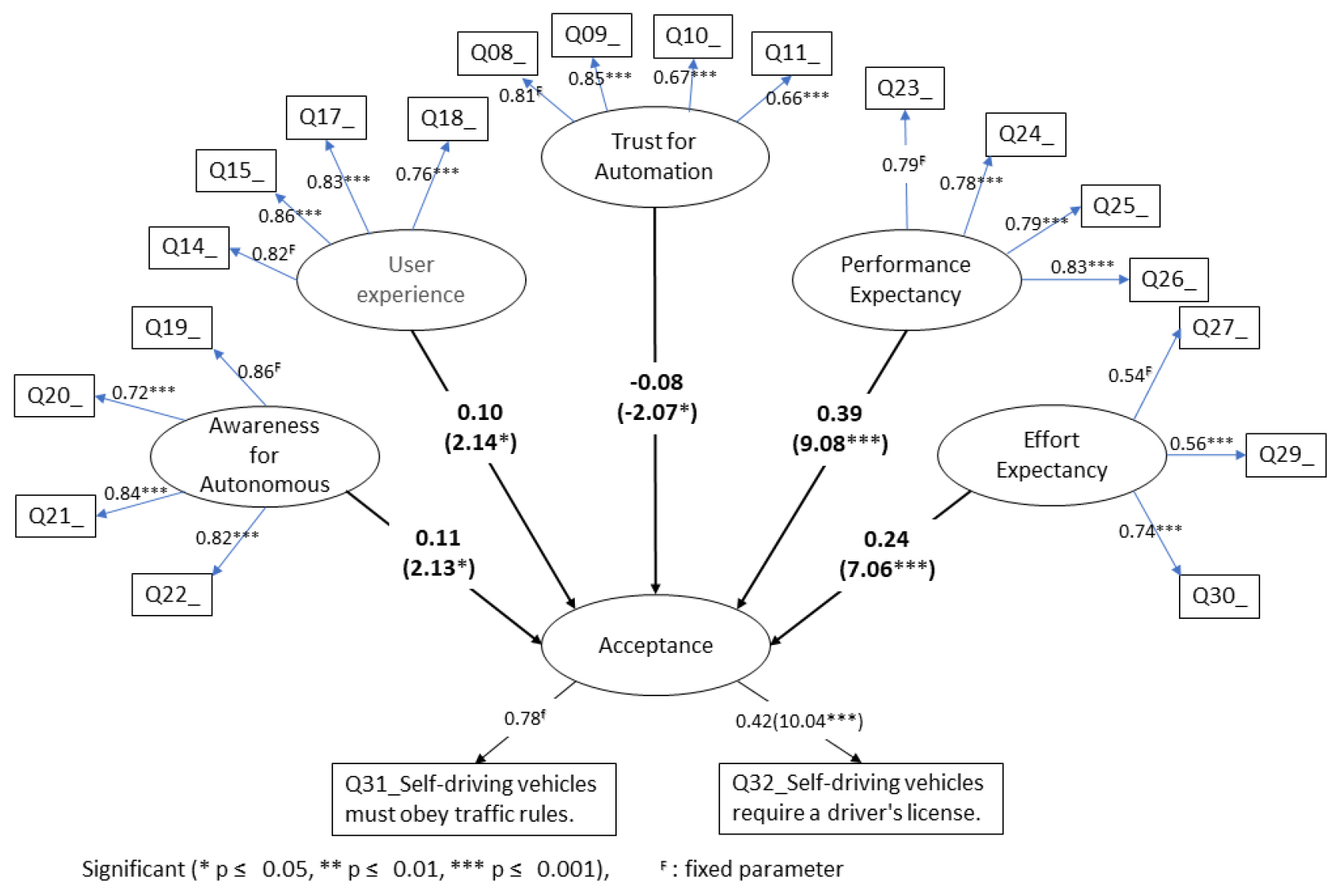
본 연구는 선행연구의 UTAUT모델에 기반 하여 “자동화 신뢰성(Automation Trust), 기대성과(Performance Expectancy)와 기대 노력(Effort Expectancy), 그리고 자율주행자동차의 사용자 경험(Experience) 및 인지도(Awareness) 등을 독립변수로 구성한 자율주행시스템 운전면허에 대한 수용성 분석”의 가설모형이며, 구조방정식의 한 형태인 다중지표 다중원인(Multiple Indicator Multiple Cause, MIMIC)모형으로 설정하였다(Figure 1 참조).
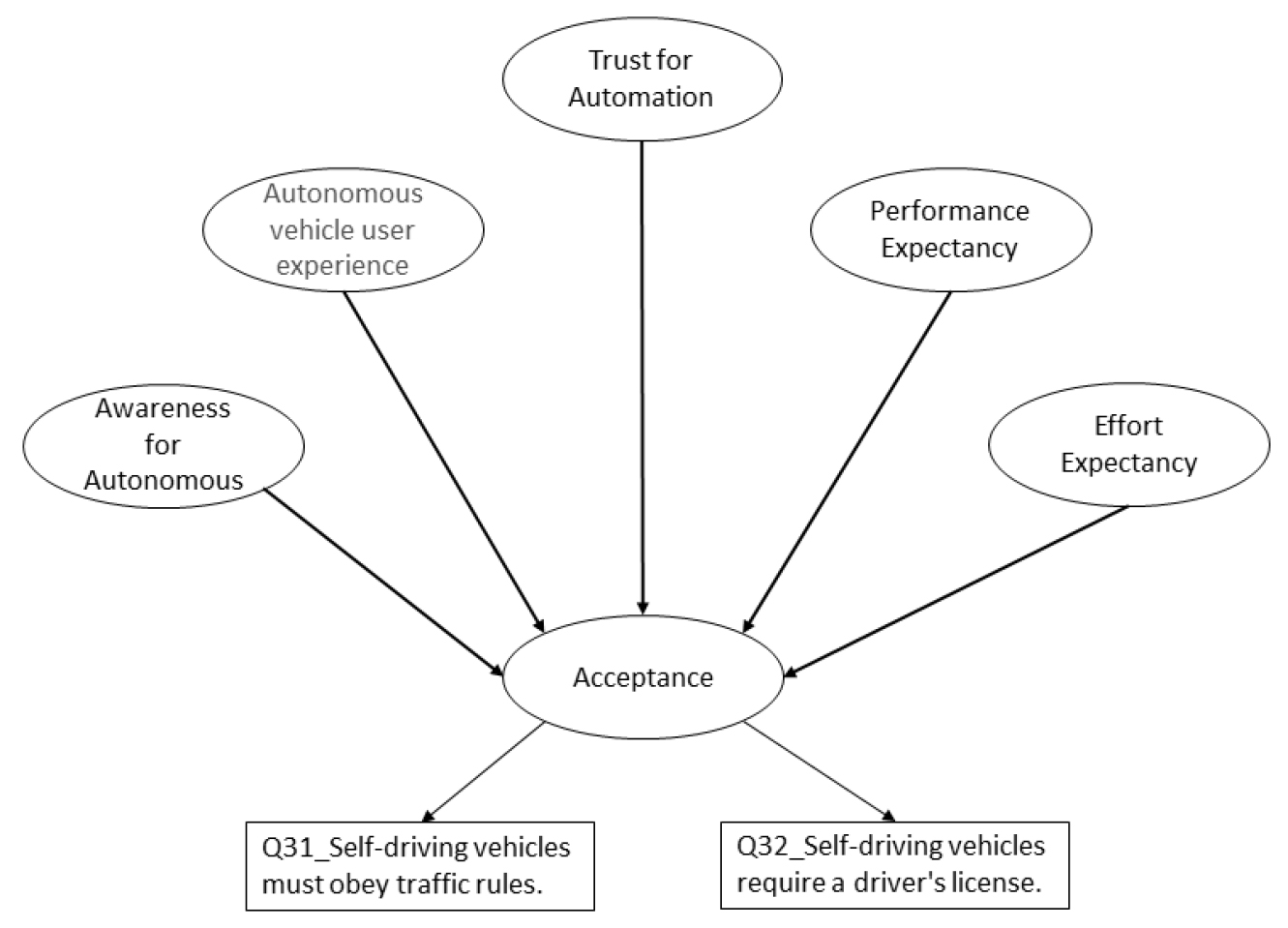
다중 지표 다중 원인(MIMIC) 모델링 접근 방식은 자율주행자동차의 접근성(예: 자동화 신뢰성에 대한 의식 수준과 자율주행자동차의 인지도 및 사용자 경험, 기대 성능과 기대 노력)의 영향을 제어하는 잠재적인 이론적 구성을 조사하는 데 다음과 같은 기여를 한다. 첫째, 본 연구는 신뢰(Trust)가 자율주행시스템의 면허제도의 수용성에 미치는 영향을 조사한다. 둘째, ADAS((Advanced Driver Assistance Systems)에 대한 사용자 체험에 대한 빈도가 자율주행시스템 면허 수용성에 미치는 영향을 연구한다. 마지막으로, UTAUT와 CTAM(Osswald et al., 2012; Cho et al., 2017)에서 바라보는 신기술이 가져오는 성능과 노력에 대한 이해도와 그리고 자율주행자동차에 관한 인지도가 자율주행 시스템의 면허제도 수용성에 도움이 되는지에 대한 관리적 함의를 검토하고자 한다.
2. 자료수집
1) 표본설계
본 연구에서는 Figure 1에 대한 가설모형을 분석하기 위해 전국 만19세 이상 국민 대상으로 “자율주행자동차에 대한 국민의식조사”를 설계하여 구글 온라인 설문조사로 수행하였다. 본 설문조사의 표본규모는 1,945명으로 신뢰구간은 95%(표준오차±2.2)에 해당된다.
2) 인구통계학적 특성
자율주행자동차 국민의식 수용성 설문조사의 총 응답자는 1,945명이다. 인구통계학적 특성은 Table 1에 제시하고 있으며, 권역별 응답자 비율은 수도권(49.7%), 동남권(16.5%), 충청권(12.6%), 대경권(9.7%), 호남권(9.0%), 강원권(2.5%) 순으로 분포되어 있다. 응답자 중 1,449명(74.5%)가 남성이고, 496명(25.5%)은 여성이었다. 연령분포를 보면 20대 약10%, 30대 21%, 40대 36.5%, 50대 26.8%, 60대 이상은 5.7%였다. 응답자의 약 95%는 운전경험이 있고, 또한 최근 5년 이내 도로교통사고 경험자 비율은 약 43%였다.
Table 1.
Sample details
3. 변수의 정의
1) 자율주행시스템의 면허제도 도입에 관한 수용성(Acceptance)
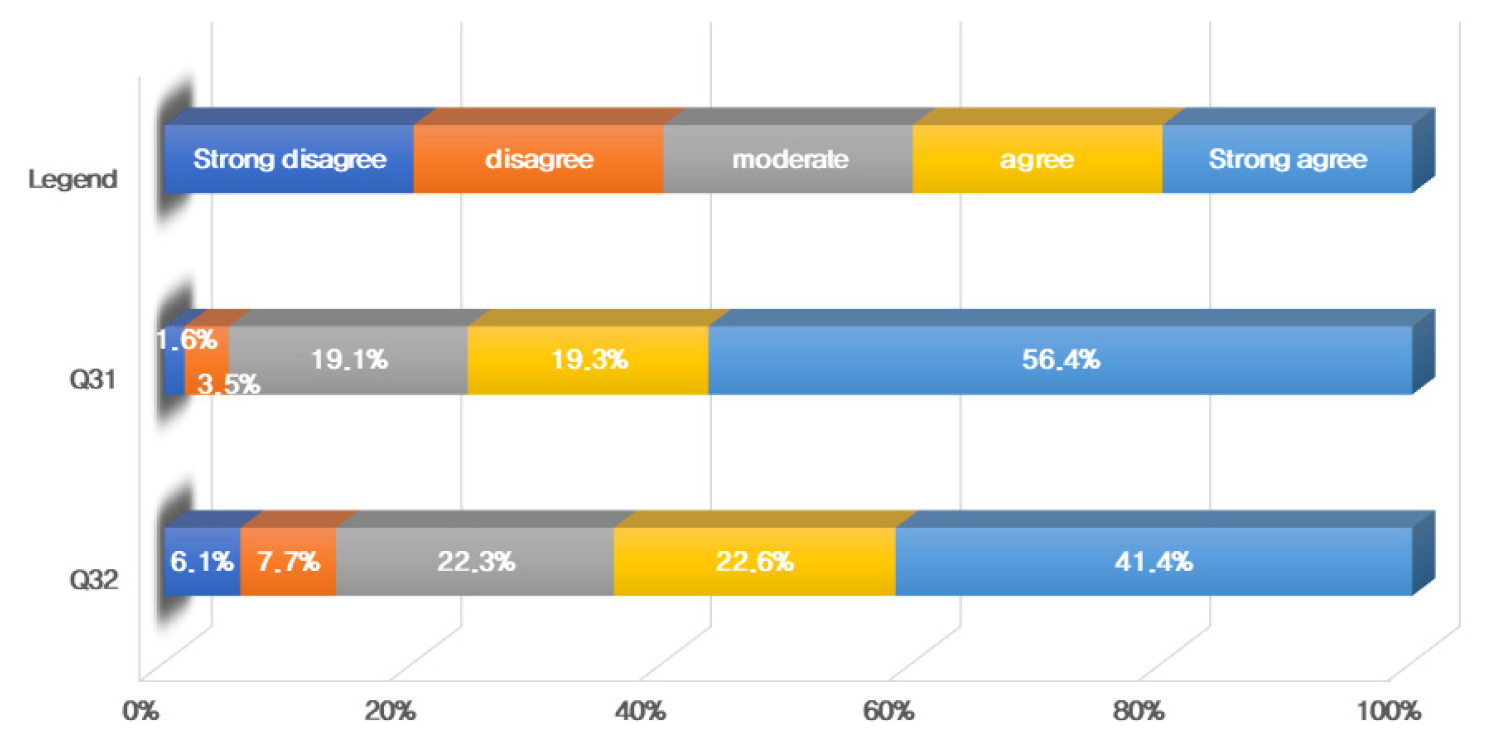
먼저, 종속변수에 해당하는 자율주행시스템 수용성에 대한 잠재변수는 다음과 같은 2개 측정변수로 정의하였다. 이는 자동차 자체에 관한 것으로 도로교통법에 따른 형사 책임 문제로, 인간과 자율주행시스템과의 관계에서 운전면허 이슈(e.g., Lee and Kim, 2015; Kim, 2016b, 2017, 2020; Hwang and Lee, 2016)에 대한 것이다. 본 연구의 수용성 가설모형에 명시된 자율주행시스템에 대한 운전면허 수용성(Acceptance)는 다음 두 항목 설문에 대해 “「전혀 아니다(1점)」에서 「매우 그렇다(5점)」까지 5점 척도로 설계하였다.
• Q31_도로의 통행규칙 및 규제에 대한 운전 능력을 갖추어야 한다.
• Q32_자율주행시스템은 운전면허를 취득해야 한다.
설문 결과를 Figure 2에서 보면 “자율주행시스템이 도로교통의 통행규칙 및 규제에 대한 능력(Q31)을 갖추어야 한다.”에 약 76%가 동의하고 있다. 또한, 자율주행시스템이 운전면허를 취득해야 한다(Q32)에 약 64%가 찬성하고 있다. 이는 자율주행시스템의 운전면허제도(Kim, 2020)에서 주장하고 있는 내용과 일치하며 대중 관점에서 자율주행시스템의 운전면허에 대한 수용성이 높은 수준에 있다고 할 수 있다.
2) 자동화에 대한 신뢰성 (Trust for Automation)
신뢰성은 자율주행자동차 수용성에 영향을 미친다(Helldin et al., 2013; Choi and Ji, 2015; Marthin, 2020; Zhang et al., 2020). 본 연구의 가설모형에 명시된 자동화에 대한 신뢰(Trust for Automation)는 자율주행자동차가 상용화 이전인 점을 고려하여 일상생활에서 경험하고 있는 “교통수단의 자동화에 대해 신뢰하고 있다”에 대해 설문하였다. 그 결과 자동운영 철도(약52%)와 자동항법 항공(43%) 대비 자율주행시스템(32%)과 인공지능(약38%)에 대한 신뢰성이 낮게 형성되어 있었다(Figure 3 참조).
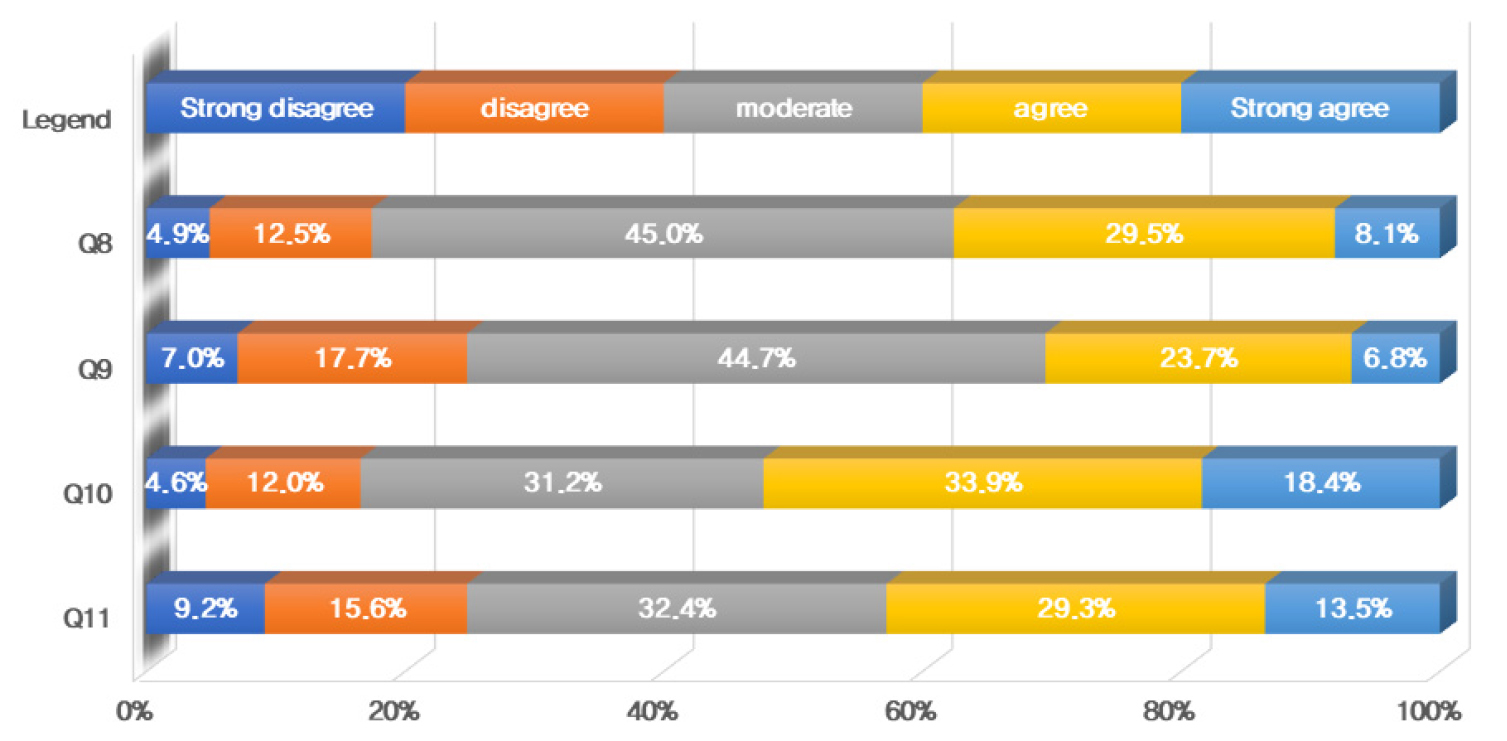
• Q08_인공지능에 대해 신뢰(Trust in artificial intelligence)
• Q09_자율주행자동차에 대한 신뢰(Trust in self-driving vehicles)
• Q10_자동운영 철도에 대한 신뢰(Trust in automated train operation)
• Q11_항공기 자동항법에 대한 신뢰(Trust in aircraft autopilot)
3) 기대성능(Performance Expectancy)
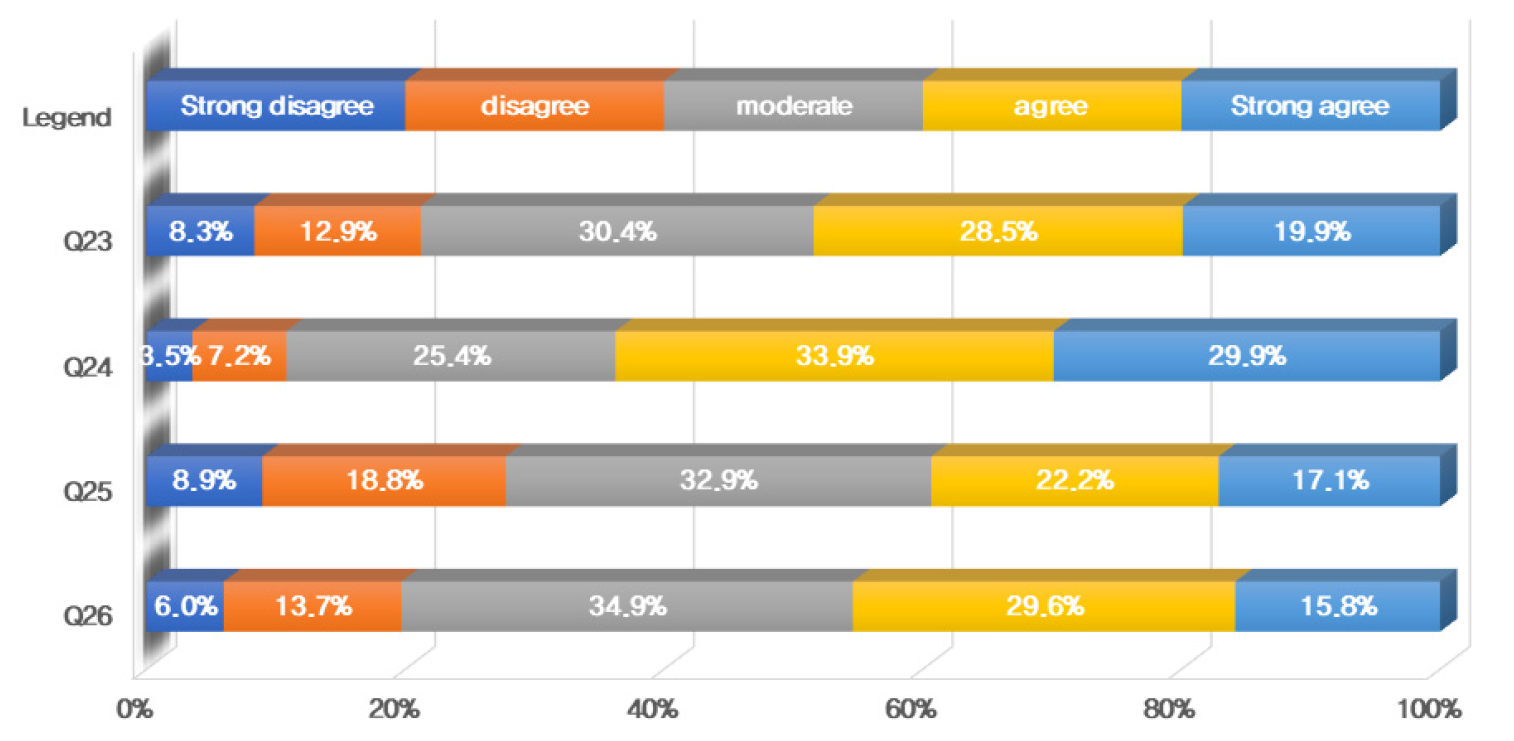
자율주행자동차 보급은 교통 혼잡, 에너지 의존, 주차, 공해, 소음, 안전 등과 같은 교통문제들을 해결할 수 있는 잠재력이 높다(Alessandrini et al., 2014; Lee, 2017a; Lee, 2019). 기대성능은 자율주행자동차의 사용에 대한 수용성에 매우 중요한 영향을 미친다(Nordhoff et al., 2016). 본 가설모형에서는 완전자율주행자동차(레벨5)가 가져 올 사회적 파급효과에 대한 설문으로 설계하였다. 기대성능에 대해서는 Q24_교통약자의 이동성 확대(약 64%), Q23_이동 중 생산 활동(약 48%), Q26_자동차 사고 감소(45%), Q25_교통 혼잡 감소(39%) 순으로 긍정적인 의식을 가지고 있는 것으로 나타났다(Figure 4).
• Q23_운전 업무로부터 해방과 생산 활동이 가능하다. (Free from driving and activities will be possible.)
• Q24_고령자 ‧ 교통약자 등에게 이동성이 확대된다. (Mobility will be expanded to the vulnerable user.)
• Q25_교통 혼잡이 감소된다. (Traffic congestion will be reduced.)
• Q26_자동차 사고가 감소된다. (Car accidents are reduced.)
4) 기대노력(Effort Expectancy)
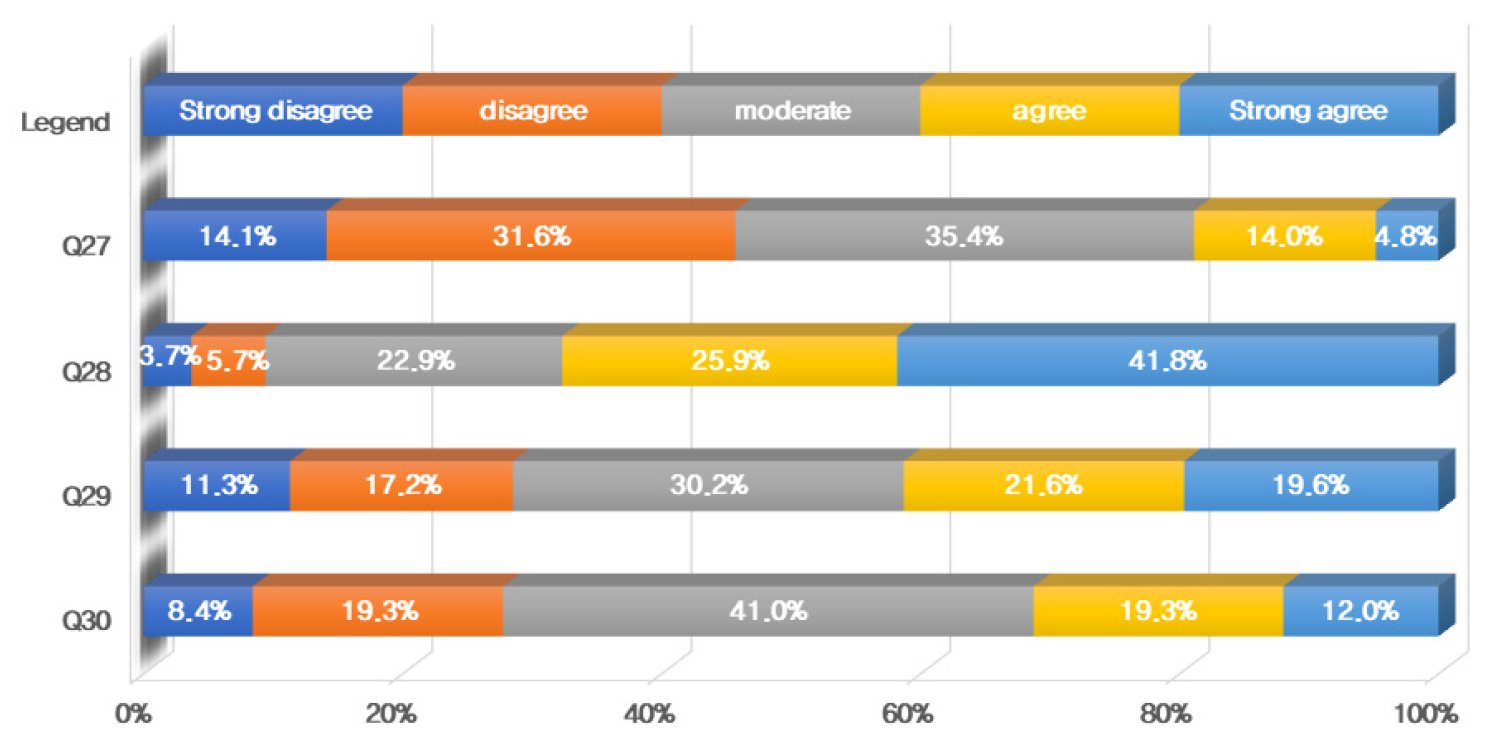
자율주행자동차가 가져 올 기대성과를 누리기 위해 필요한 기대노력으로 조작방법의 접근성이 영향을 미친다(Osswald et al., 2012; Cho et al., 2017). 본 가설모형에서 기대 노력은 Cho et al.(2017)이 고려한 변수(Q_27: 사용방법의 용이성)와, 추가로 완전자율주행자동차(레벨5)가 새로운 교통수단으로 자리매김하는데 필요한 항목에 대해 문항을 설계하였다. 또한 기대 노력에 대한 의식은 Figure 5에 제시하고 있다.
• Q27_사용방법이 어렵다. (It will be difficult to use this function.)
• Q28_자동차 번호판의 구별이 필요하다. (It will be required to distinguish vehicle license plates.)
• Q29_전용차로 또는 전용도로의 사용이 필요하다. (It will be necessary to use an exclusive lane/road.)
• Q30_구호조치가 어렵다. (It will be difficult to take measures for first aid to an accident.)
5) 운전자 경험(User Experience)
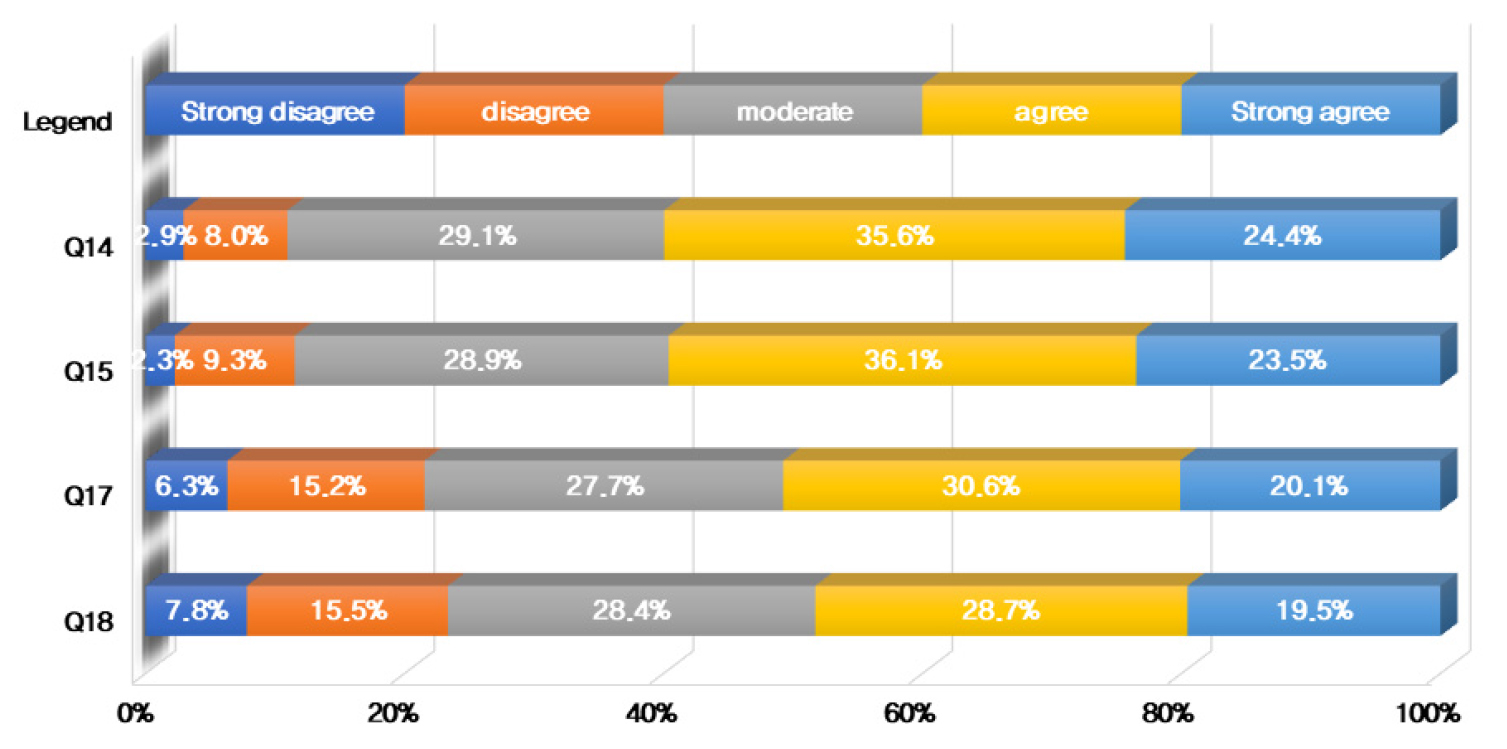
SEA 기준 자동화 레벨 2단계에서 운전자의 안전 및 편의성 보조시스템(ADAS)이 이미 상용화되었다. ADAS에 대한 사용자 경험은 자율주행자동차 수용성에 영향을 미친다(Lindgren et al., 2020; Kempapidis et al., 2020). 이에 근거하여 Figure 6에 다음 4개 기능에 대한 사용자 경험을 「사용경험이 없다(1점)」에서 「매우 자주 사용한다(5점)」까지 5점 척도로 설계하였다. ADAS의 각 기능의 사용 수준은 Figure 6에서와 같이 BCA가 약 48%, ACC가 약 51%, AEB와 LDWS가 약 60% 수준인 것으로 나타났다.
• Q14_차선유지 및 이탈경고 시스템(Lane Departure Warning System, LDWS)
• Q15_긴급제동 시스템(Autonomous Emergency Braking, AEB).
• Q17_능동형 크루즈 컨트롤(Adaptive Cruise Control, ACC)
• Q18_후측방충돌방지보조(Blind-spot Collision-Avoidance assist, BCA)
6) 자율주행자동차 관련 인지도(Awareness of Autonomous Vehicles)
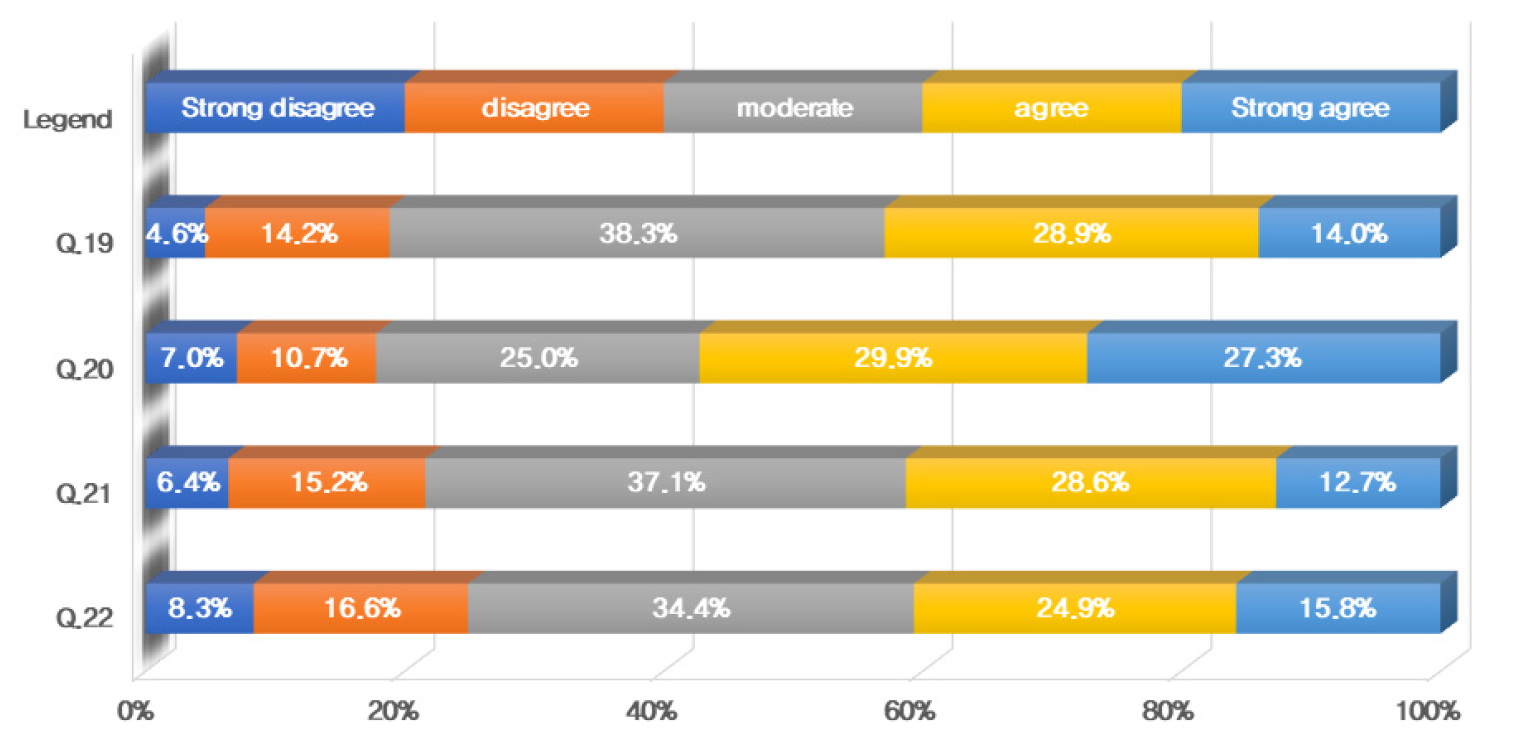
자율주행시스템의 면허제도 도입과 같은 새로운 교통정책의 수용성은 자동차의 자동화 수준과 같은 관련 사항에 대한 인지도가 긍정적인 영향을 미친다(Chung and Kim, 2015). 본 연구에서는 다음 항목에 대해 「전혀 아니다(1점)」에서 「매우 그렇다(5점)」까지 5점 척도로 설계하였다.
• Q19_SAE 기준 자동화수준(Level of Automation according to SAE J3016)
• Q20_ADAS 사용에 따른 운전자 책임(Driver Responsibilities for ADAS Use).
• Q21_조건부 자율주행자동차(Level 3 according to SAE J3016)
• Q22_완전 자율주행자동차(Level 4/5 according to SAE J3016)
자율주행자동차의 자동화 수준에 대한 인지도(Q19, Q21, Q22)는 약57%, 자동화 기능 사용에 따른 운전자 책임에 대한 인지도는 약 40-42% 수준으로 나타났다. 이는 Figure 7에 제시한 바와 같이 ADAS가 상용화되어 사용자 경험이 갖추어져 있기 때문으로 이해할 수 있다.
분석결과
1. 자료의 타당도
Table 2는 설문내용과 요인분석에서의 요인 적재량과 Cronbach’s alpha 값을 나타낸 것이다. 측정값에 대한 신뢰도는 Cronbach’s alpha를 통해 검토한다. Tavakol and Dennick(2011)에 따르면 타당성 권장 기준은 Cronbach’s alpha가 0.60 이상으로 간주되지만, Cronbach’s alpha는 소수의 항목에 의해 편향된 것으로 가정된다(Hair et al., 2006). 따라서 확인적 요인 분석(Confirmatory factor analysis, CFA)이 Figure 1에서 도입한 6개 잠재변수에 대한 이론적 구성을 하고 있는 측정 모델의 판별 타당성을 검증하기 위해 실행되었다. 모든 구조적 경로(예: 모델의 특정 인과경로 또는 공변량)는 건전한 측정 모델을 기반으로 하기때문에 측정 모델은 우수한 수렴 및 판별 유효성을 확보해야 한다.
먼저 측정 설문항에 대한 내적 일관성은 Cronbach’s alpha 값이 0.6 이상으로 적절한 신뢰도를 확보하고 있다. 또한 CFA를 통해 기대노력에서 척도 Q28의 요인 적재량이 낮아 제거하였다. 그 이외의 척도들은 요인 적재량이 모두 0.5 이상으로 적정한 요인 타당도를 갖고 있는 것을 확인하였다.
Table 2.
Questions for the survey and descriptive statistics
2. 가설모형의 검정
1) 통계량 기준
유효한 측정 모델을 설정한 후 MIMIC모델링 접근 방식을 사용하여 잠재적인 이론적 구성(Figure 1 참조)에서 경로의 방향과 강도에 대한 가설을 검정한다. MIMIC 모델링은 SEM(Structural Equation Modeling)의 특정 사례에 해당하며, 측정 모델(즉, 잠재 이론적 구성체와 지표 간의 관계)과 구조적 모델(즉, 잠재 이론적 구성체 간의 우연적 관계)로 구성된다(Jöreskog and Sörbom, 1996). MIMIC 모델은 잠재 이론 구성에 영향을 미치는 것으로 가정되는 추가 변수 또는 공변량을 통합하는 동시에 이러한 잠재적 구성 간의 영향을 미치는 효과에 대한 가설검정을 한다(Proitsi et al., 2011).
LISREL은 MIMIC 모델링을 수행하는 데 사용되었다. 또한 무응답을 처리하기 위해 Full information maximum likelihood estimation(FIML)이 적용되었다. FIML은 사용 가능한 모든 데이터에서 모델의 파라미터 추정이 가능하다(Peyre et al., 2011). 따라서 FIML은 정보 및 통계적 검정력에 대한 손실을 최소화할 뿐만 아니라 비정규 데이터의 경우에도 편향되지 않은 파라미터 추정을 유도한다(Arbuckle et al., 1996).
측정 모델과 MIMIC 모델에 대해 적합성 평가에는 몇 가지 기준이 사용된다. 일반적으로 자유도와 관련하여 χ2통계량은 표본 크기에 민감하다(Barrett, 2007). 따라서 모형의 적합도 평가는 CFI(Comparative Fit Index)와 AGFI(Adjusted Goodness of Fit Index), 그리고 RMSEA(Root Mean Squared Error of Approximation)를 사용하여 평가한다. CFI는 0.95 이상의 값은 매우 좋은 적합도(Hu and Bentler, 1999)를 보이고, AGFI 값은 0.90 이상, RMSEA 값은 0.05 미만인 기준을 만족할 경우 우수한 적합성을 나타낸다(Jöreskog and Sörbom, 1996).
2) MIMIC 모형 결과
자율주행 시스템 운전면허 제도에 대한 수용성은 각 타당성 지표 값이 우수한 적합도를 보이고 있다(χ2=1,760.25, df=172, p<.001; CFI=0.97; RMSEA=0.069). 따라서 Figure 1의 가설 모형에 대해 통계적으로 귀무가설을 채택할 수 있다. 또한 가설모형에 대한 잠재변수 및 측정변수 등 구성에 대한 경로계수들이 신뢰구간 95% 이상에서 우수한 t-통계량을 확보하고 있다. Figure 8에서는 잠재변수의 파라미터와 t-통계량, 그리고 잠재변수에 대한 측정변수의 파라미터와 t-통계량의 신뢰구간을 제시하고 있다.
3. MIMIC 모형 해석
자율주행시스템의 운전면허에 관한 대중수용성은 MIMIC의 5개의 잠재변수 관점의 수용성에 대한 해석 및 시사점은 다음과 같다.
1) 자율주행자동차에 대한 기대성능
자율주행자동차에 대한 기대성능이 높을수록 자율주행시스템의 운전면허제도 수용성에 긍정적인 영향을 미치고 있다(β=0.39). 본 연구의 설문항목 Q23_운전업무 해방(γ=0.79)과 Q24_교통약자에 대한 이동성 확대(γ=0.78), Q25_교통사고 감소(γ=0.79), Q26_교통혼잡 감소(γ=0.83) 등은 자율주행시스템의 운전면허의 수용성에 긍정적인 영향을 미치고 있다.
결론적으로 자율주행자동차가 우리들에게 편안함의 수준을 높이고(Othman, 2020a), 생산성을 개선하고(Bansal et al., 2016; Othman, 2020b), 교통약자 ‧ 고령자 등 제한된 사람들의 이동성 개선에 기여(Antov et al., 2012)하고, 궁극적으로 인적 오류를 제거 하여 교통안전 90% 이상 향상(Securing America’s Future Energy, 2018) 등의 기대성능은 자율주행 시스템의 운전면허 제도 수용성에 긍정적인 요인이었다.
2) 자율주행자동차에 대한 기대 노력
자율주행자동차에 대한 노력이 필요하다는 의식이 높을수록 자율주행시스템의 운전면허제도 수용성에 긍정적인 영향을 미치고 있다(β=0.24). 설문항목에 해당하는 Q30_구호조치가 어렵다(γ=0.74), Q29_전용차로 또는 전용도로 사용(γ=0.56), Q27_사용방법의 용이성(γ=0.54) 순으로 자율주행시스템의 운전면허제도에 대한 수용성이 긍정적이다. 이를 통해 구호조치가 어렵다는 인식이 다른 요인보다 크게 자율주행시스템에 대한 운전면허의 필요성에 영향을 미친다고 할 수 있다. 이는 이용자인 국민들이 자율주행자동차의 기대효과들을 누리기 위해서는 사람운전자가 대응할 수 있었던 구호 활동에 대한 대응이 필요하다는 것을 인식하고 있다는 것을 의미하고, 사고 발생 이후 자율주행시스템의 구호활동이 사람 운전자와 동일할 수 없다고 생각하고 있다는 것을 의미한다. 따라서, 이러한 인식이 사고 발생에 따른 형사 책임 관점에서 사고 발생 이후 형사 책임 소재에 대한 분쟁을 명확히 하고 안전 운전을 위한 도로 법규의 준수 능력을 평가하는 자율주행시스템의 면허 제도 필요성에 영향을 미치고 있다.
3) 자율주행자동차에 대한 이해도
새로운 교통정책에 대한 수용성은 그 정책의 인지도에 긍정적으로 영향을 받는다(Chung and Kim, 2015). 본 연구결과에서도 자율주행자동차에 대한 이해도가 높을수록 자율주행시스템의 운전면허제도 수용성에 긍정적인 영향을 미치고 있다(β=0.11). 본 연구의 자율주행자동차 이해도는 Q19_SAE 기준 자동화수준(γ=0.86), Q21_조건부 자율주행자동차(γ=0.84), Q22_완전 자율주행자동차(γ=0.82), Q20_ADAS 사용에 따른 운전자 책임(γ=0.72) 순으로 자율주행시스템의 운전면허제도에 대한 수용성에 긍정적으로 영향을 미치고 있다. 특히, SAE 기준 자율주행자동차의 자동화 수준에 대한 이해도가 높을수록 면허제도가 필요하다고 생각하는 것으로 나타났다. 따라서 자율주행시스템의 운전면허 제도 수용성은 해당 기술수준에 따른 기능과 그 한계에 대한 이해도가 중요하다는 점이 확인되었다. 이는 면허제도의 수용성을 높이기 위해서는 대중을 대상으로 하여 자동화 기술기준에 대해 충분히 홍보해야 한다는 의미로, 도로교통법 기반 자율주행시스템의 면허에 대한 거버넌스 구축에 매우 중요한 요인으로 해석된다.
4) 자동화 차량의 사용경험
자동화 자동차의 사용경험은 많을수록 자율주행시스템의 운전면허제도 수용성에 긍정적인 영향을 미치고 있다(β=0.10). 자동화 차량의 사용경험은 Q15_AEB(γ=0.86), Q17_ACC(γ=0.83), Q14_LDWS(γ=0.82), Q18_BCA(γ=0.76) 순으로 자율주행시스템 면허의 수용성에 긍정적이지만, 대중 수용성에 대한 자율주행자동차 사용경험은 긍정적으로 작용한다는 연구(Piao et al., 2016; Wintersberger et al., 2016)와 부정적인 작용한다는 연구(Richardson and Davies, 2018)가 있다. 따라서 본 분석결과 만으로 사용자 경험은 반드시 자율주행시스템의 운전면허 수용성에 긍정적인 영향만을 미치는 것으로 단정하기는 어렵다.
5) 자동화에 대한 신뢰성
위에서 검토한 4개의 잠재변수와 다르게 자동화 신뢰성은 자동화에 대한 신뢰도가 높을수록 자율주행시스템의 운전면허가 필요 없다는 부정적인 수용의식이 나타났다(β=-0.08). 자동화의 신뢰성을 설명하는 관측변수들은 Q09_자율주행자동차의 신뢰(γ=0.85), Q08_인공지능의 신뢰(γ=0.81), Q10_철도 ATO의 신뢰(γ=0.67), Q11_자동항법의 신뢰(γ=0.61) 순으로 부정적 영향을 미치고 있었다. 이는 자율주행자동차에 대한 신뢰성이 갖추어질 경우 자율주행자동차에 대한 면허가 필요하지 않다고 인식하는 것으로 해석된다. 즉 자율주행자동차가 자동차관리법에 근거하여 성능인증 범위에 포함된다는 점을 전제로 성능에 대한 신뢰성이 갖춰질 경우 도로교통법에 따른 별도 자율주행시스템 면허에 대한 수용성에는 부정적으로 작용할 수 있다고 생각할 수 있다.
결론
선행 연구에서는 법률적으로 자율주행자동차의 운행에도 운전면허 제도가 필요함을 지적하고 나아가 현행 체계로 대응하기에는 어려움이 있음을 지적하고 있다. 또한 사람이 아닌 자율주행시스템이 운전 기능을 수행하는 것을 고려했을 때, 자율주행시스템의 법규 준수 능력을 평가하고 위반 시 처벌과 관련된 사항을 정립하여야 한다. 그러나 현행 법 체계 상 “면허” 개념을 도로교통법 그대로 적용하기 어려우므로 이에 맞는 개념과 제도에 관한 정비의 필요성도 지적하고 있다. 이처럼 자율주행자동차 도입 시 자동차에 대해 “면허” 개념의 자격을 부여하는 제도 개편의 가능성과 필요성을 충분히 인지하고 법률 이론 측면에서의 논의는 활발히 진행되어 왔다.
한편, 자율주행자동차 관련 수용성 연구에서는 시범 운행 중인 자율주행차량이나 향후 도입될 것을 전제로 하여 수용성을 측정하기 위한 종속변수인 행동의도를 향후 자율주행자동차를 이용할 것인가라는 이용 의향으로 설정한 연구들이 다수 있었다. 수용성은 도입 시스템의 종류, 자율주행자동차의 레벨, 국가 등에 따라 영향을 미치는 요인과 그 영향력이 각각 다르게 나타나는 것을 알 수 있었다. 그러나 대부분의 연구는 자율주행자동차에 사용된 기술 및 상품 그 자체의 수용성을 분석한 것으로, 자율주행차량의 도입과 함께 변화될 가능성이 큰 법적 제도적 수용성에 미치는 영향을 분석한 실증 연구는 거의 존재하지 않는다고 볼 수 있다. 하지만 상술한 바와 같이 자율주행자동차가 본격적으로 도입되면 지금까지와는 다른 법 ‧ 제도적 측면의 변화가 발생할 것으로 예상되므로 이용자의 법 ‧ 제도적 수용성 또한 분석되어야 할 필요성이 있다.
본 연구는 자율주행자동차 레벨3-5에게 부여될 가능성이 있는 자율주행시스템의 운전면허에 관한 수용성 분석을 수행하였다. 우리나라는 일본 및 중국과 같이 도로교통법을 경찰이 담당하는 거버넌스를 갖추고 있다. 이는 유럽과 미국 등의 많은 국가에서 교통국에서 도로교통법과 자동차관리법을 일원화하고 있는 거버넌스와 다른 환경에서 형성된 대중 관점의 교통문화 측면에서 자율주행자동차의 운전면허 제도 수용성을 논의한 결과로, 한국형 교통문화 기반의 자율주행시스템에 대한 운전능력 평가의 거버넌스에 대한 새로운 함의를 부여할 수 있을 것으로 기대된다. 특히 자율주행자동차 상용화에 따른 도로주행으로 발생할 수도 있는 국민의 생명과 재산 침해에 대한 주체가 될 국민들이 자율주행자동차 면허제도에 대해 어떻게 인식하고 받아들일지에 관한 수용성 분석에 초점을 두었다. 본 연구는 일반 대중을 대상으로 한 자율주행시스템(레벨4/5)의 운전면허제도 수용성에 대해 UTAUT 모델을 기반으로 하여 자동화 신뢰성, 기대성과, 기대 노력, 자율주행자동차의 사용자 경험과 인지도 등을 독립변수로 한 인과구조(MIMIC) 모델을 분석하였다. 그 결과는 다음과 같다.
첫째, 수용성 조사 결과는 전국 일반인(신뢰수준 95%±2.2) 대상 기준으로 자율주행시스템의 운전면허 취득(Q32)에 대해 찬성이 약 64% 수준에 있었다. 이는 레벨(4/5)의 자율주행시스템에 대한 운전면허제도 도입을 주장하고 있는 Kim(2020) 연구와 일관성 있는 결과일뿐만 아니라 일반 대중도 그 필요성을 인지하고 있다고 볼 수 있다. 자율주행시스템의 운전면허는 도로 주행 시 법규의 준수 능력에 해당하는 형사 책임 규정과 연관된다. 이는 자동차 자체에 관한 안전성 확보와 결함 등 민사책임에 해당하는 자동차관리법이 아닌 도로교통법에 따른 형사 책임 문제이기 때문에 인간과 자율주행시스템과의 운전 이슈(Lee and Kim, 2015; Kim, 2016b, 2017, 2020; Hwang and Lee, 2016)에 대한 해결 관점에서 깊이 있는 숙의가 필요하다.
둘째, 자율주행시스템 운전면허 수용성의 인과구조는 잠재변수에 해당하는 자율주행자동차의 기대효과(β=0.39, p≤0.001), 기대노력(β=0.24, p≤0.001), 자율주행자동차의 이해도(β=0.11, p≤0.05), 자동화 차량의 이용경험(β=0.10, p≤0.05) 순으로 긍정적인 영향을 미치고 있지만, 자동화 신뢰성(β=-0.08, p≤0.05)이 부정적인 영향을 미치고 있다는 것을 확인할 수 있었다. 따라서 자율주행자동차와 같은 새로운 기술의 수용성은 UTAUT 모델과 수정 모델 등에서 확인한 것과 동일하게 본 연구에서도 기대성과, 기대 노력, 자율주행자동차의 사용자 경험과 인지도 자동화 신뢰성 등이 자율주행시스템의 운전면허 수용성에도 유의한 영향을 미치고 있다는 점이 확인되었다.
셋째, 다섯 개의 잠재 변수 중 자동화에 대한 신뢰가 자율주행시스템에 대한 운전면허 제도의 수용성에 부정적 요인으로 작용하고 있음을 주목할 필요가 있다. Jeferson and Mcdonald(2019)가 2019년 발생한 자율주행자동차 사고 이후 트위터의 반응을 데이터로 사용하여 자율주행자동차 사고가 대중의 신뢰에 미치는 영향에 대해 정량 분석을 실시한 결과, 사고 이후 자율주행자동차에 대한 대중의 반응은 긍정에서 부정으로 변화하였음을 밝혔다. 또한, Othman(2021)은 자율주행자동차의 사고발생 건수가 증가함에 따라 사람들은 자율주행자동차를 더 무서워하게 되었고 자율주행자동차의 사고 건수가 감소하면 자율주행자동차를 두려워하는 사람들의 비율도 감소함을 분석하였다. 비록 신뢰에 대한 본 연구에서의 설문에서는 사고발생 건수와 그 피해에 대한 감정을 반영하지 못하고 있지만, 자율주행자동차에 대한 신뢰도는 안전과 밀접한 관계가 있음을 알 수 있다.
본 연구의 분석 결과와 선행 연구에서의 논의를 종합했을 때, 이용자들에게 자율주행자동차 차량이 도로교통 규칙에 부합하여 사람이 운전하는 차량들과 조화를 이루며 안전하게 주행할 수 있다는 신뢰를 줄 수 없다면 자율주행자동차가 가져오는 편익에 관계없이 선호도가 현저히 떨어진다는 것을 생각할 수 있다. 따라서 자율주행자동차 제조사가 자율주행자동차의 안전성과 성능을 담보하는 것과 동시에 자율주행자동차가 도로교통에 조화롭게 흡수될 수 있다는 점을 대중에게 입증할 수 있는 방안을 마련하여야 한다. 나아가 신뢰도 이외의 기대성능, 기대노력, 이해도, 사용경험 등의 변수가 자율주행시스템의 운전면허 수용성에 대해 긍정적 요인으로 작용한 점을 고려했을 때, 자율주행기술에 대한 이해도를 높이고 자율주행자동차 이용에 따른 편익을 올바로 홍보할 수 있도록 담당 부처와 이해 관계자의 거버넌스 융합 및 협업을 통해 국민에 대한 자율주행시스템 면허에 대한 인식 재고를 위해 노력해야 할 것이다.
