

서론
1. 연구의 배경 및 목적
2. 선행 연구
연구방법론
1. 분석 체계 구축
2. 악의환경 영향 검토
3. 분석 환경 설정
4. 분석 지표
분석 결과
1. 도로 구간별 센서 인지 범위 영향
2. 도로 구간별 통신 지연 시간 영향
3. 도로 구간 전체 분석
결론
서론
1. 연구의 배경 및 목적
자율주행자동차는 4차산업혁명의 신성장동력으로 자동차 기술의 패러다임을 변화시키고 있으며, 현재 전 세계적으로 SAE(Society of Automotive Engineers) 기준 자율주행 기술 3단계 및 4단계(SAE, 2016)의 시스템을 개발하고 있다. 국내에서는 2027년 전국 주요 도로 완전자율주행(SAE 기준 4단계) 세계 최초 상용화를 위하여 2024년까지 법제도 및 인프라를 세계에서 선도적으로 완비하는 계획인 “미래자동차 산업 발전전략, 2030년 국가 로드맵”을 발표하여 추진 중에 있다.
최근 차량에 장착되고 있는 센서 기술과 V2X(vehicle-to-everything) 통신 기술의 발전은 도로교통에서의 자율협력주행 환경 구축을 가속화하고 있다. 자율협력주행은 자율주행 자동차와 통신기술이 결합된 CAV(Connected Autonomous Vehicle)의 안전하고 효율적인 도로 주행을 가능하게 하는 체계로 정의될 수 있다. 도로교통에서 100% 자율협력주행 환경 구축을 위해서는 차량의 센서 및 제어기술, 도로 인프라, 통신환경, 교통정보 등 다양한 구성 요소들이 뒷받침되어야 한다. 이와 같은 자율협력주행 관련 기술들은 개별적으로 발전하고 있으나, 모든 구성 요들을 통합하여 완전 자율주행 시대가 오기까지는 상당한 시간이 걸릴 것으로 전망된다(KOTI, 2021). 특히, 자율주행차량들이 일반차량들과 혼재되어 운영될 시(mixed traffic), 도로교통 운영 측면에서 자율주행의 순기능을 확보하는 것이 최우선 과제라 할 수 있다.
이러한 배경에 따라서 최근에는 자율주행과 비자율주행 차량들이 혼재된 상황이 도로교통 운영에 미칠 수 있는 영향 분석에 대한 국내외 연구들이 진행되어 왔다(Tak et al., 2016; Lee et al., 2018a; Jeong et al., 2020; Zheng et al., 2020; Ko et al., 2021). 이러한 연구들은 혼합 교통 상황(mixed traffic)에서의 차량 추종 행태, 차로변경, 상대속도, 차두시간 등에 대한 미시적인(microscopic) 변화를 기반으로 특정 도로 구간 내 교통류 안전성에 대한 영향을 분석한다는 공통점이 있다. 그러나 이러한 연구들은 차량의 센서와 통신 환경에 문제가 없다는 전제하에 수행된 연구이다. 실제 도로 상황에서는 각종 기상 및 인프라 상황에 따라서 차량 장착 센서들이 주변 환경을 인식하는 도중 오류가 발생하여 인지 범위(sensing range)가 감소할 수 있으며, V2X 단말기(On Board Unit, OBU)도 실시간 교통 상황 데이터를 받는 데에 있어 통신 지연(communication delay)이 발생할 수 있다. 이러한 현상들의 발생은 자율주행차량의 인식 오류를 일으키게 되어 차량의 제어 단계에서 잘못된 판단을 내릴 수 있고, 이에 따라서 개별 차량의 주행위험도가 증가하고 최악의 경우에는 사고로도 이어질 수 있다(Mohammed et al., 2020). 특히, 자율주행차량의 도입률이 증가할수록 단순히 차량 1, 2대만이 아닌 도로 구간 교통류 전체의 안전성에 문제가 될 수 있다. 따라서 센서 인지 범위 또는 통신 지연 범위의 변화가 교통류 안전성에 미치는 영향에 대한 연구가 필요하다.
본 연구의 목적은 안개, 비, 눈 등의 기상적인 악의환경을 가정하고 자율주행차량 센서 인지 및 통신 지연 범위의 변화에 따른 도심로 교통류 안전성을 분석하고자 한다. 이를 위하여 본 연구에서는 VISSIM 시뮬레이션 프로그램(PTV, 2018) 기반의 교통류 안전성 분석 체계를 구축하고, 악의환경에 의하여 변할 수 있는 센서 인지 범위 및 통신 지연 시간의 다양한 변수를 설정하여 이를 시뮬레이션 기반 실험에 적용하고자 한다. 그 이후, 교통류 안전성에 관련된 분석 지표를 선정하여, 시뮬레이션 구현을 통하여 추출한 데이터를 기반으로 분석 지표를 산출하고 다양한 시나리오 결과 간 비교분석을 수행한다. 이러한 분석은 각종 악의환경에서도 교통류 안전성을 유지하기 위한 자율주행 센서 인지 범위 및 통신 지연의 최소 요건에 대한 기본 정보를 제공할 수 있다는 점에 의미가 있다.
2. 선행 연구
자율주행 관련 기술 도입이 도로에서 차량의 미시적 행태 및 교통류에 미칠 수 있는 영향에 대한 선행 연구 사례는 Table 1과 같다. 해당 사례들의 목록을 보면 최근 5년 간 수행된 연구들이 대다수를 차지하며, 이와 같은 추세는 자율주행차량의 도입 단계인 현재 시점에서 해당 연구 주제가 크게 주목받고 있음을 의미한다. 해당 연구 사례들 중 본 연구와 관련이 깊은 것으로 사료되는 대표적 선행 연구는 다음의 설명과 같다.
Table 1.
List of related researches
| No. | Authors | References | Title |
| 1 |
Ko W., Park S., So J., Yun I. | Ko et al. (2021) |
Analysis of effects of autonomous vehicle market share changes on expressway traffic flow using IDM |
| 2 | Jeong J., Park J., Oh C. | Joeng et al. (2020) |
Assessing the safety effects of expressway managed lane for autonomous bus using traffic simulation |
| 3 |
Zheng F., Liu C.,
Jabari S. E., Lu L. | Zheng et al. (2020) |
Analyzing the impact of automated vehicles on uncertainty and stability of the mixed traffic flow |
| 4 |
Ahn D. R., Shin S. G.,
Baek Y. S., Lee H. K. | Ahn et al. (2019) | Hazard analysis of autonomous vehicle due to V2I malfunction |
| 5 |
Lee H., Chae H.,
Seo H., Yi K. | Lee et al. (2018b) |
Quantitative analysis of automotive radar-based perception algorithm for autonomous driving |
| 6 |
Lee S., Oh M.,
Oh C., Jeong E. | Lee et al. (2018a) |
Automated driving aggressiveness for traffic management in automated driving environments |
| 7 |
Park S., Jeong H.,
Kim K. H., Yun I. | Park et al. (2018a) |
Development of safety evaluation scenario for autonomous vehicle take-over at expressways |
| 8 |
Jeong S., Moon Y.,
Lee S. Y., Hwang K. Y. | Jeong et al. (2017) | Impacts of automated vehicles on traffic flow changes |
| 9 |
Kim Y., Tak S., Kim J.,
Yeo H. | Kim et al. (2017) |
Evaluation of accident prevention performance of vision and radar sensor for major accident scenarios in intersection |
| 10 | Park J., Oh C., Yun D. | Park et al. (2017) |
A methodology for evaluating vehicle driving safety based on the analysis of interactions with roads and adjacent vehicles |
| 11 | Tak S., Kim S., Yeo H. | Tak et al. (2016) |
A study on the traffic predictive cruise control strategy with downstream traffic information |
| 12 |
Park I. S., Lee J. D.,
Lee J. Y., Hwang K. Y. | Park et al. (2015) |
Impacts of automated vehicles on freeway traffic-flow
- Focused on Seoul-Singal basic sections of GyeongBu freeway |
| 13 | Kim T. U., Bae S. H. | Kim and Bae (2013) |
Analysis of car following model of adaptive cruise controlled vehicle considering the road conditions according to weather circumstance |
| 14 | Son Y. T., Jeon J. S. | Son and Jeon (2013) |
A study on traffic-flow characteristic changes on expressway by visibility |
| 15 |
Jeong E., Oh C.,
Kang K., Kang Y. | Jeong et al. (2012) |
Development of traffic safety monitoring technique by detection and analysis of hazardous driving events in V2X environment |
| 16 |
Park J. T., Hong J. Y.,
Lee S. B. | Park et al. (2010) |
Development of traffic accident safety index under different weather conditions |
| 17 |
Choi J. S., Son B.,
Choi J. S. | Choi et al. (2009) | The effect of rain on traffic flows in urban freeway basic segments |
| 18 |
Baek S. K., Kim B. J.,
Lim Y. T. | Baek et al. (2008) | Analysis of rain impacts on freeway trip characteristics |
Kim et al.(2017)은 차량 센서 기반 첨단 운전자 지원 시스템(Advanced Driver Assistance System, ADAS)이 도시부 도로에 적용되었을 때의 기대 성능을 분석한 바 있다. 해당 연구에서는 카메라 비전 센서 및 레이더 센서 등 다종 센서 기반의 데이터를 활용하여 센서의 인지 성능별로 도시부 도로에서의 차량 대 차량의 사고 발생 비율을 기준으로 안전성을 분석하였다. Ahn et al.(2019)은 도시부 도로에서 자율주행차량의 V2I(vehicle-to-infrastructure) 통신에 오작동이 발생하였을 경우에 대한 위험성 분석을 수행하였다. V2I 통신의 오류로 인하여 실제 교통 상황 대비 잘못된 정보가 차량에 제공된다면 차량 대 차량 사고 발생 비율이 증가하게 된다는 시사점을 도출하였다. 이와 같이 차량의 센서 또는 통신의 성능에 따른 차량 주행 위험도 분석에 관련된 연구 사례가 있으나, 앞서 언급된 연구들은 특정 도로 구간의 교통류 전체에 미치는 영향에 대한 연구가 아닌, 자율주행 관련 기술을 장착한 차량들의 미시적 행태에 대한 영향을 분석하였다.
특정 도로 구간의 교통류에 미치는 영향에 대한 연구 사례로는 Jeong et al.(2012)이 있다. 해당 연구는 V2I 통신이 가능한 OBU로부터 수집되는 자료를 활용하여 급감속 및 급차로변경 등 안전 모니터링 지표를 개발하여 특정 도로 구간에 대한 안전성 평가기법을 제시한 바 있다. Ko et al.(2021)에서는 VISSIM 시뮬레이션 프로그램을 활용하여 특정 도로 구간에서 자율주행차량의 도입 비율(market penetration rate, MPR)에 따른 급감속과 차로변경 발생 비율 변화로 교통류 안전성에 대한 영향을 분석하였다. 이와 같이 통계적 데이터 또는 시뮬레이션을 활용하여 차량들의 미시적 행태가 아닌 도로 구간 교통류에 대한 영향 분석을 수행한 사례가 몇 있다. 그러나 앞서 언급하였듯이 안개, 비, 눈 등의 기상적인 악의환경이나 인프라의 상태에 따라서 차량의 센서나 통신 기능에 문제가 발생한 경우를 가정하여, 해당 경우들이 발생하였을 때 도로 구간 교통류 안전성에 미치는 영향에 대한 연구는 미흡한 실정이다. 따라서 본 연구에서는 악의환경을 가정하고 자율주행차량 센서 인지 및 통신 지연 범위의 변화에 따른 도심로 교통류 안전성을 분석하고자 한다. 이러한 분석은 각종 악의환경에서도 교통류 안전성을 유지하기 위한 차량 센서의 인지 범위 및 통신 지연의 최소 요건을 찾아가는 데에 필요한 정보를 도출할 수 있다.
연구방법론
1. 분석 체계 구축
본 연구에서는 자율주행차량이 악의환경에서 주행할 때의 교통류 안전성을 분석하기 위하여, 악의환경으로 인해 발생할 수 있는 센서 인지 범위의 변화, 통신 지연 시간 변화 등의 변수 입력이 가능한 VISSIM 시뮬레이션 프로그램을 활용하였다. VISSIM은 1992년 독일 PTV Group에서 개발된 미시적 교통 시뮬레이션 프로그램으로, 각종 차량 및 보행자의 통행과 대중교통 운영 등을 모형화하기 위해 개발되었다.
본 연구에서는 동일 교통 시나리오에 대하여 다양한 환경의 변수들을 입력하여 특정 도로 구간의 교통류 안전성을 분석하고자 한다. 본 연구의 전반적인 구성은 Figure 1과 같다. 우선, 분석 대상인 환경적 요소로는 1) 일반차량(비자율주행)을 포함한 전체 교통량 대비 자율주행차량의 도입 비율(MPR), 2)자율주행차량의 센서 인지 범위의 변화, 3)자율주행차량의 통신 지연 시간 변화로 구분하여 정의하였다. 테스트 대상인 도로 구간을 VISSIM에 적용한 후, 앞서 정의한 환경적 변수를 다양하게 적용한 시나리오들을 해당 도로 구간에 구현하게 된다. 각 시나리오 구현을 통하여 분석에 필요한 데이터를 추출할 수 있는 체계를 구축하였으며, 추출된 시뮬레이션 데이터는 해당 도로 구간에 대한 교통류 안전성을 분석에 활용되는 것으로 전반적인 프로세스를 정리하였다.

2. 악의환경 영향 검토
자율주행차는 레이더, 라이다, 카메라 등의 센서를 이용해 주변 상황을 탐지하여 해당 정보를 기반으로 차량 제어를 자율적으로 수행한다. 최근에 발생한 해외의 자율주행차량 관련 사고 사례들을 보면(Roh, 2020), 야간, 비, 눈, 안개 등의 악의환경 속에서의 센서의 인지 범위가 현저하게 감소할 수 있다. 이에 따라서 센서 기반의 정보만으로는 신호등이나 장애물 및 보행자 등의 주행 중 주변 상황을 정확하게 인식하는 데에 한계가 발생하여 차량 사고로 이어지기도 한다. 또한, 일반 차량의 운전자와는 달리 비교적 먼 거리나(250m 이상) 사각지대에 대한 상황 정보를 인지할 수 없는 한계도 있다. 자율주행차량에 장착된 센서의 성능 기술도 중요하나 센서가 인지할 수 없는 부분은 주변 차량과의 통신을 통해 얻는 정보로 보완이 가능하다. V2I 또는 V2V(vehicle-to-vehicle) 통신으로 주변 차량들의 위치, 속도, 방향 등 다양한 데이터를 다른 차량과 상호 교환하며 차량에 장착된 센서가 인지하지 못할 수도 있는 상황을 파악해야 한다. 그러나 무선통신 또한 차량이 주행 경로를 따라 이동할 때 다양한 경로를 통해 이동하므로 다양한 주행 환경이 발생하여 통신 성능이 저하될 가능성이 높아진다. 통신 차량이 고밀집되어 통신 채널 사용이 높아질 경우, 고층 건물에 의한 인식 저하, 기상악화로 인한 통신 산란 등이 발생하였을 때 통신이 불가한 상황까지 발생할 수도 있다. Tak et al.(2016) 연구결과에 의하면, 추종 상황인 2대의 자율주행차량간 0.1초의 통신 지연이 발생하면, 두 차량의 상대속도 변화를 기반으로 도출한 주행 안정성은 1.5배 감소하는 것으로 나타났다.
이와 같이 자율주행차량에서는 다양한 악의환경에서 센서 인지 범위의 저하와 통신 지연이 발생하여 차량 간 사고위험도가 증가하고 나아가서는 도로 구간 교통류 안전성에 영향을 미치게 될 것으로 예상된다. 이러한 영향에 대한 분석을 위하여 본 연구에서는 자율주행차량의 센서 인지 범위 변화 및 통신 지연에 대한 변수를 기존 자료를 검토하여 설정하였다. 본 연구에서 실험을 수행할 센서의 인지 범위는 자율주행자동차 핵심기술개발사업의 일환인 한국산업기술평가관리원의 “자동차전용도로/도심로 자율주행 시스템 개발 및 성능평가” 사업(KATECH, 2020)에서 수행한 연구를 통하여 도출한 결과를 기반으로 (15m, 25m, 50m, 100m, 150m)로 설정하였다. 통신 지연에 대한 실험 설정은 KT(2018)에서 도출한 연구 결과를 참고하여 (0.2초, 0.4초, 0.6초, 0.8초, 1.0초)로 설정하였다. 또한, 향후 도로 체계에서 운행될 자율주행차량의 비율이 점진적으로 증가하여 완전자율주행 시대로 나아간다는 점을 가정하여 자율주행차량의 도입 비율(MPR)을 (20%, 40%, 60%, 80%, 100%)로 다양하게 설정하여 실험을 수행하고자 한다.
3. 분석 환경 설정
1) 테스트 지역
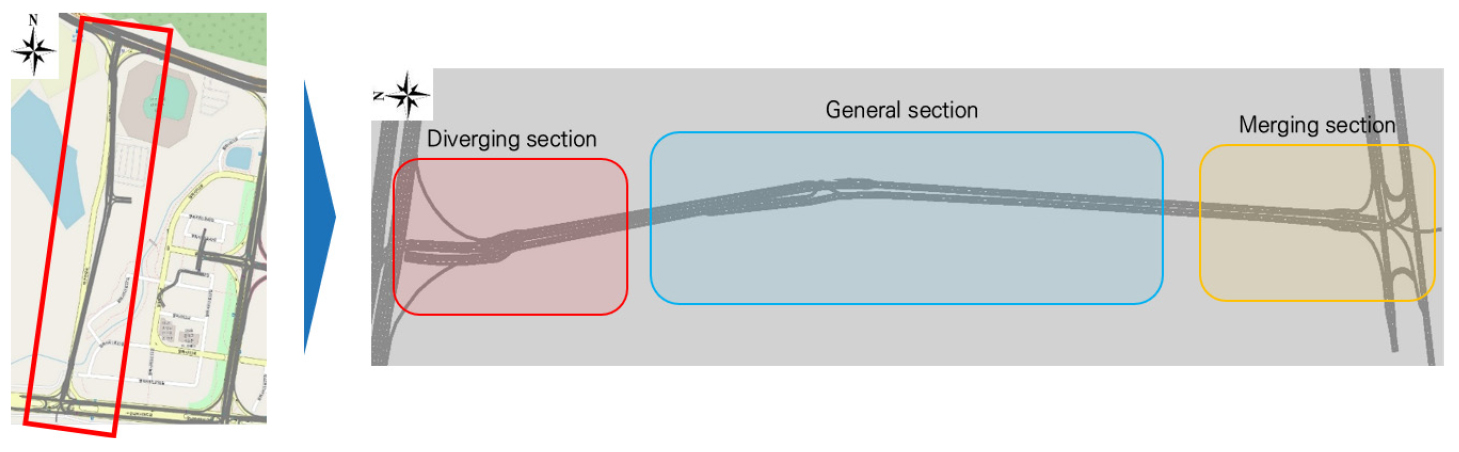
본 연구에서는 자율주행차량 도입 시 다양한 도로 및 교통 상황에서의 교통류 안전성 분석을 위하여 Figure 2와 같이 실제 대구광역시의 자율주행 테스트베드 구역인 수성알파시티 야구전설로를 실험 대상 도로 구간으로 선정하였다. 해당 도로 구간에는 분류 구간(diverging section), 합류 구간(merging section), 일반 구간(general section)이 존재하여, 각기 다른 도로 인프라 구조별로 다르게 나타날 수 있는 mixed traffic 행태에 대한 분석이 가능하다. 해당 도로 구간 전체의 길이는 대략 1km이며, 시뮬레이션에서의 도로 제한 속도는 50km/h로 설정하였다.
2) 시나리오 설정
악의환경에서의 센서 인지 범위와 통신 지연이 미치는 영향을 분석하기 위하여, 앞서 설정한 센서의 인지 범위(15m, 25m, 50m, 100m, 150m)와 통신 지연(0.2초, 0.4초, 0.6초, 0.8초, 1.0초), 자율주행차량 MPR(20%, 40%, 60%, 80%, 100%)에 따라서 Table 2와 같이 시뮬레이션 시나리오를 구성하였다.
Table 2.
Simulation scenarios
각 시나리오는 큰 범위에서 자율주행을 하지 않는 비자율주행 상황, 센서 인지 범위의 변화가 발생한 상황, 통신 지연이 발생한 상황 총 3종류로 구분하였다. 우선 비자율주행 상황은 도로의 차량들이 모두 일반차량임을 가정하고, 일반차량은 센서 및 통신 기술의 지원을 받지 않기 때문에 센서 인지 범위를 운전자의 시각으로 맞추어 250m로 설정하였으며 통신 지연은 0초로 설정하였다. 센서 인지 범위 변수는 5개이며, 각 인지 범위별로 5개의 AV(autonomous vehicle) MPR 변수가 설정되기 때문에 이에 대한 총 시나리오의 개수는 25개이다. 센서 인지 범위 자체에 대한 영향만을 보기 위하여 해당 시나리오들에서는 통신 지연이 없음을 가정한다. 통신 지연의 변수도 역시 5개이며, 각 지연 범위별로 5개의 MPR 변수가 설정되기 때문에 이에 대한 총 시나리오의 개수도 25개이다. 통신 지연 자체에 대한 영향만을 보기 위하여 해당 시나리오들에서는 센서 인지 범위 변화가 없음을 가정한다. 따라서 본 연구에서의 분석하는 시뮬레이션 시나리오의 개수는 총 51개이다.
개별 시나리오에 대한 상세 설정은 Table 3과 같다. 앞서 설명한 바와 같이 각 시나리오에는 동일한 교통량(3,000vph)이 적용되나 각기 다른 MPR, 센서 인지 범위, 통신 지연의 변수가 적용된다. VISSIM 시뮬레이션에서 센서 인지 범위 변화는 해당 프로그램의 “Driving Behavior”를 설정하는 모듈에서 “Look ahead distance” 변수를 조정하여 적용하였으며, 통신 지연 시간 변화는 동일 모듈에서 “Temporary lack of attention” 변수를 조정하여 적용하였다. 본 연구에서는 센서 인지 범위의 저하와 통신 지연 각각의 성능 저하 발생이 모든 자율협력주행 차량에 동일하게 발생하는 것으로 가정(발생 확률 100%)하여 시뮬레이션 실험을 수행하였다.
Table 3.
Details of each simulation scenario
시뮬레이션에서 구현하는 구간의 도로 환경은 일방향(북향) 2차로로 구성되며, 주행 구간은 합류 구간, 일반 구간, 분류 구간의 순서로 진행하게 된다. 참고로, 해당 구간 하류부에 위치한 분류 구간에서는 구간 끝에 존재하는 신호등 때문에 신호 대기가 발생하여 정체가 주로 발생한다. 해당 구간 상류부에 위치한 합류 구간의 시작점에는 직진으로 진입하는 타 도로는 없고 우회전 또는 좌회전을 통한 진입로만 존재하기 때문에 교통 상태가 대체적으로 원활하다. 해당 구간 중간에 위치한 일반 구간에서는 하류부의 정체 상황에 따라 교통 상태가 원활 또는 정체를 오가는 행태를 보인다. 따라서 본 연구에서는 교통이 정체인 상태와 원활한 상태 모두에 대한 분석이 가능토록 설정되었다.
3) 추출 데이터
본 연구의 분석을 위하여 VISSIM 시뮬레이션에서 추출한 데이터에 대한 설명은 다음과 같다. 시뮬레이션 데이터는 총 600초(10분)간의 교통 시나리오를 구현한 결과를 추출하였으며, 이 중 시뮬레이션 warming-up 시간인 0-120초 사이의 데이터는 제외하였다. 120초부터 600초까지 480초간 0.1초 단위로 기록된 데이터를 유효데이터로 활용하였다.
VISSIM에서 추출할 수 있는 다양한 시뮬레이션 데이터 중 본 연구의 분석에 활용한 데이터는 Table 4와 같다. 시뮬레이션에서 구현된 모든 개별 차량의 속도, 가속도, 위치한 차로, 위치한 차로에서의 상세 위치, 차로 변경 여부, 선행 차량과의 차두거리 및 상대속도 등 분석에 필요할 수 있는 요소들을 고려하여 다양한 데이터를 추출하여 활용하였다.
Table 4.
List of extracted data from simulation
4. 분석 지표
1) 도로 구간별 분석 지표
교통류 안전성 분석을 위해 각 구간별 분석을 위한 지표와 전체 구간에 대한 분석지표로 구분하였다. 먼저, 구간별 지표는 대리안전척도(surrogate safety measure, SSM) 중 TTC(time-to-collision)를 활용하여 분석하고자 한다. TTC(단위: sec)는 차량 간 위치와 속도 차이에 의하여 표현되는 대리안전척도이며 해당 값이 작을수록 위험도가 높다고 판단한다. 본 연구에서의 차량 간 추종 상황에 대한 TTC를 다음과 같이 정의한다.
여기서, : Lane where vehicle is actually located
: Location of -th vehicle in lane at time
: Speed of -th vehicle in lane at time
시뮬레이션에서 구현된 모든 차량들의 0.1초 단위 를 산출하면 각종 추종 상황에 따라서 그 범위는 다양할 수 있다. 그러나 모든 값들을 활용하는 것은 안전성 분석에 크게 의미는 없다. 예를 들어 값이 10초 이상인 경우에는 차량 간 추종 상황으로 볼 수 없기 때문에 해당 값을 보유한 차량에 대한 데이터는 교통류 전체의 안전성에 큰 영향이 없다고 볼 수 있기 때문이다. 따라서, 본 연구에서는 Wang et al.(2020)에서 조사한 바와 같이 의 값이 3.0초 이내인 차량들을 추종 상황에서 주행 중인 차량으로 보고, 이들에 대한 데이터를 활용하여 안전성 분석에 활용한다. 본 연구에서 산출된 중 추종 상황에서 주행 중인 차량들의 데이터의 그룹을 로 정의하고 이를 분류하는 조건식은 Equation 2와 같다.
또한 본 연구에서는 사고위험도가 높아 교통류 안전성에 영향을 미친다고 판단되는 기준을 값이 1.5초 이내(Park et al., 2018b)로 설정하여 분석한다. 산출된 중 사고위험도가 높은 1.5초 이하인 데이터의 그룹을 로 정의하고 이를 분류하는 조건식은 Equation 3과 같다.
본 연구에서 제시하는 안전성 지표를 Risk Occurrence Rate(ROR)로 정의하고자 한다. 그리고 차량 추종 상황에 대한 지표인 은 앞서 에서 언급한 과 의 데이터 그룹을 활용하여, 차량 추종 상황에서 주행 중인 차량 수 대비 사고위험도가 높은 차량 수의 비율로 표현한다. 이에 대한 산출식은 Equation 4와 같다.
여기서, : Number of data samples of
: Number of data samples of
차로 변경 상황에 대한 안전성 지표도 기존 TTC의 개념을 활용하여 제시한다. 차로변경에 대한 TTC는 한 대의 차량()이 현재 위치한 차로()에서 옆의 차로()로 위치를 변경한다고 가정하였을 때의 위치()와 기존 위치에서의 속도()가 변경된 위치에서의 속도()가 같다는 가정하에, 변경된 차로의 최근접 후방차량()과의 관계로 산출한다. 본 연구에서의 차로 변경 상황에 대한 TTC를 다음과 같이 정의한다.
여기서, : Lane that vehicle is assumed to change
: Location of vehicle in lane
v _{i,k} (t) : Speed of vehicle in lane
본 연구에서는 차량이 차로를 변경하였을 때, 변경된 차로의 후방차량과의 추종 상황이 발생하고 상충(conflict)에 근접하여 후방차량이 급감속을 할 수도 있는 상황을 위험한 상황으로 간주하여 분석한다. 이에 의 값이 3.0초 이내인 차량들의 데이터 그룹을 로 정의하고 이를 분류하는 조건식은 Equation 6과 같다.
그리고 차로변경 상황에 대한 지표를 로 정의하며, 이에 대한 표현은 전체 차량 수 대비 차로변경 시 위험 상황에 진입한 차량 수의 비율로 표현한다. 이에 대한 산출식은 Equation 7과 같다.
여기서, : number of data samples of
: number of data samples of
이와 같이 본 연구에서는 차량 추종 상황과 차로변경 상황에 대한 안전성을 와 지표를 활용하여 실험 대상인 도로의 구간별로 분석하였다.
2) 도로 전체 구간 분석 지표
도로 구간 전체에 대한 교통류 안전성에 대한 분석을 위해 급감속(harsh braking) 발생에 대한 횟수를 활용하였다. TS(2017)에 따르면 위험 운전 행동에는 과속, 급가속, 급감속, 급회전, 급진로변경, 연속운전 등이 있음을 명시하였다. 본 연구에서는 급감속에 중점을 두어, Dingus et al.(2006)에서 제시한 가속도 –6m/s2 이하로 수집된 데이터 샘플 수를 급감속 발생 횟수로 산출하여 분석에 활용하였다.
이에 더불어 도로 구간에서 발생하는 차량 간 상충(crash) 발생 횟수도 활용하였다. 차량간 상충은 차량 교통사고로 이어지는 위험 상황이므로 다수의 기존 연구 사례(Yun et al., 2011)에서 안전성 분석에 활용된 바 있다. 본 연구에서는 VISSIM에서 생성된 개별차량 경로 자료를 SSAM(Surrogate Safety Assessment Model) 프로그램(FHWA, 2008)에 적용하여 차량 추종 상황 및 차로 변경 상황에서 발생하는 차량 간 상충 횟수를 산출하여 분석에 활용하였다.
분석 결과
1. 도로 구간별 센서 인지 범위 영향
차량 추종 및 차로 변경에 대하여 개별 시나리오에서 추출한 데이터를 기반으로 분류, 합류, 일반 구간별로 구간 지표를 산출하였다. 센서 인지 범위 변화에 의한 각 구간별 영향은 Figure 3과 같다.
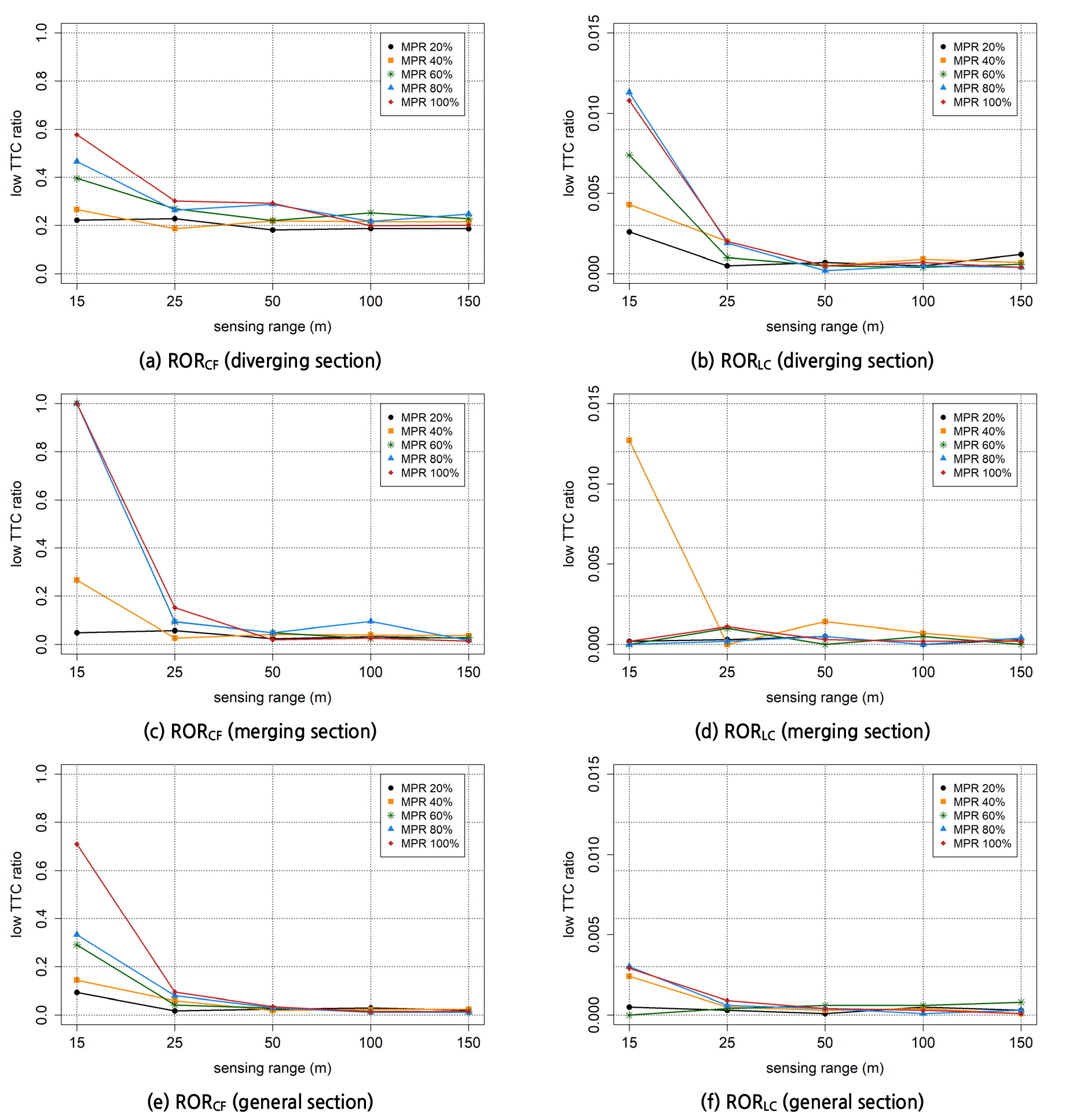
추종 상황에 관련된 지표는 3개 구간 모두에서 센서 인지 범위가 감소할수록 증가하는 것으로 나타났다. 교통이 주로 원활한 합류 구간과 일반 구간에서는 센서 인지 범위가 50m 이상일 때 지표가 0에 가까우나, 주로 정체 상황인 분류 구간에서는 센서 인지 범위가 50m 이상이어도 0.2 수준에 머무르는 것으로 나타났다. 그리고 3개의 구간 모두 센서 인지 범위가 50m인 경우에는 가 소량 증가하였으며, 25m 이하인 경우에는 해당 지표가 급격히 증가하는 것을 볼 수 있다. 또한, MPR별 비교를 보면 센서 인지 범위가 높을 시에는 MPR별 차이는 없으나, 센서의 인지 범위가 낮고 MPR이 높을수록 위험도가 높아지는 것으로 나타났다.
차로 변경에 관련된 지표는 정체 상황인 분류 구간에서 특히 센서 인지 범위의 영향이 큰 것으로 나타났다. 분류 구간에서는 차량들이 좌회전과 우회전을 위한 차로변경을 해야 하고 이에 정체 상태까지 겹쳤기 때문에 타 구간 대비 영향이 큰 것으로 보인다. 해당 구간의 지표는 와 유사하게 25m 이하의 센서 인지 범위에서 급격하게 증가하는 패턴을 보였다. 또한, MPR이 높을수록 위험도가 더욱 높은 것으로 나타났다. 반면, 합류 구간과 일반 구간에서는 원활한 교통 상태인데다가 차로 변경의 필요성인 낮은 구간이어서 차로 변경 상황 자체가 비교적 적게 발생하였다. 따라서 해당 구간들에서의 지표에는 큰 영향이 없는 것으로 보인다.
2. 도로 구간별 통신 지연 시간 영향
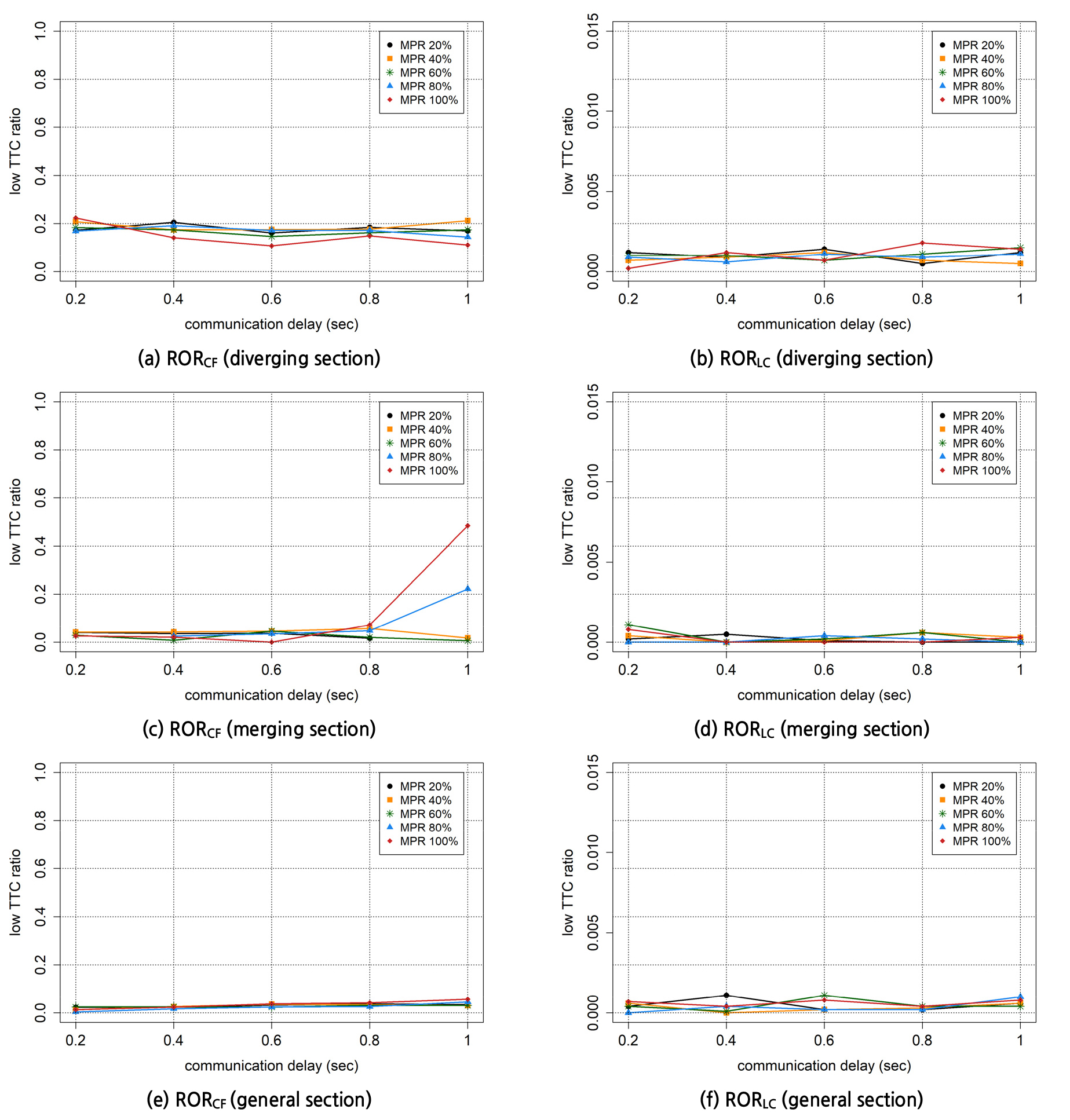
통신 지연 시간 변화에 의한 각 구간별 영향은 Figure 4와 같다. 통신 지연 시간에 따른 구간별 분석 결과, 통신 지연 시간은 센서 인지 범위 변화 영향에 대비하여 와 모두 영향이 미비한 수준이다. 통신 지연 시간과 MPR에 따른 영향은 별다른 패턴을 보이지 않았으며, 이는 자율주행 차량들이 차량의 센서를 기반으로 근거리 상황을 인지하여 주행 판단을 하고, V2X 통신은 중장거리 상황 정보를 사전에 수집하는 보조적인 역할을 하기 때문에 센서 인지 범위에 대비하여 영향이 미비한 것으로 추정된다. 단, 타 구간의 와 가 대체적으로 0에 근접해 있는 반면, 분류 구간의 지표는 0.2 수준에 있으며, 는 0.001 수준으로 타 구간 보다는 다소 높은 결과가 나타났다. 이는 분류 구간의 정체 상황으로 인하여 나온 결과로 볼 수 있다. 또한, 합류 구간의 는 통신 지연 시간이 0.8초 이상일 때 다소 증가하는 추세를 보였다. 합류 구간에서는 도로 진입 이후 차량들의 군집(platoon)이 형성되기 시작하는 구간이며, 이와 같은 결과는 V2X 통신이 차량 간 추종 상황이 발생하여 차량 군집이 안정적으로 형성되는 과정에서 중요도가 높을 수도 있다는 추정을 내릴 수 있다. 이에 대한 사항은 향후 연구에서 더욱 깊게 살펴볼 필요가 있다.
3. 도로 구간 전체 분석
도로 구간 전체에 대해 센서 인지 범위와 통신 지연 시간에 따른 영향 분석은 Figure 5와 같다. 센서 인지 범위가 감소하면서 급감속과 차량 간 상충 횟수 모두 증가하는 것으로 나타났다. 급감속과 상충 횟수 모두 센서 인지 범위 50m 이상에서는 0에 가까우며 인지 범위별 차이는 거의 없으나, 50m 이하에서는 모두 급격히 증가하는 것으로 나타났다. 더욱 자세히 살펴보면 센서의 인지 범위가 25m 이하일 때, 급감속 횟수는 최대 10배 이상, 사고 발생 횟수는 최대 5배 이상 증가하였다. 특히, 센서 인지 범위 15m에서는 급감속 및 사고 발생 횟수가 기하급수적으로 증가하였다. 게다가 분류 구간의 하류부에 있는 적색신호를 사전에 인지하지 못하여 신호 교차로를 그대로 통과하여 타 차량과 상충하는 사례가 빈번히 발생하기도 하였다. MPR별 비교를 보면 센서 인지 범위가 높을 시에는 MPR별 차이는 없으나, 센서의 인지 범위가 낮고 MPR이 높을수록 위험 상황 발생 횟수가 높아지는 것으로 나타났다.
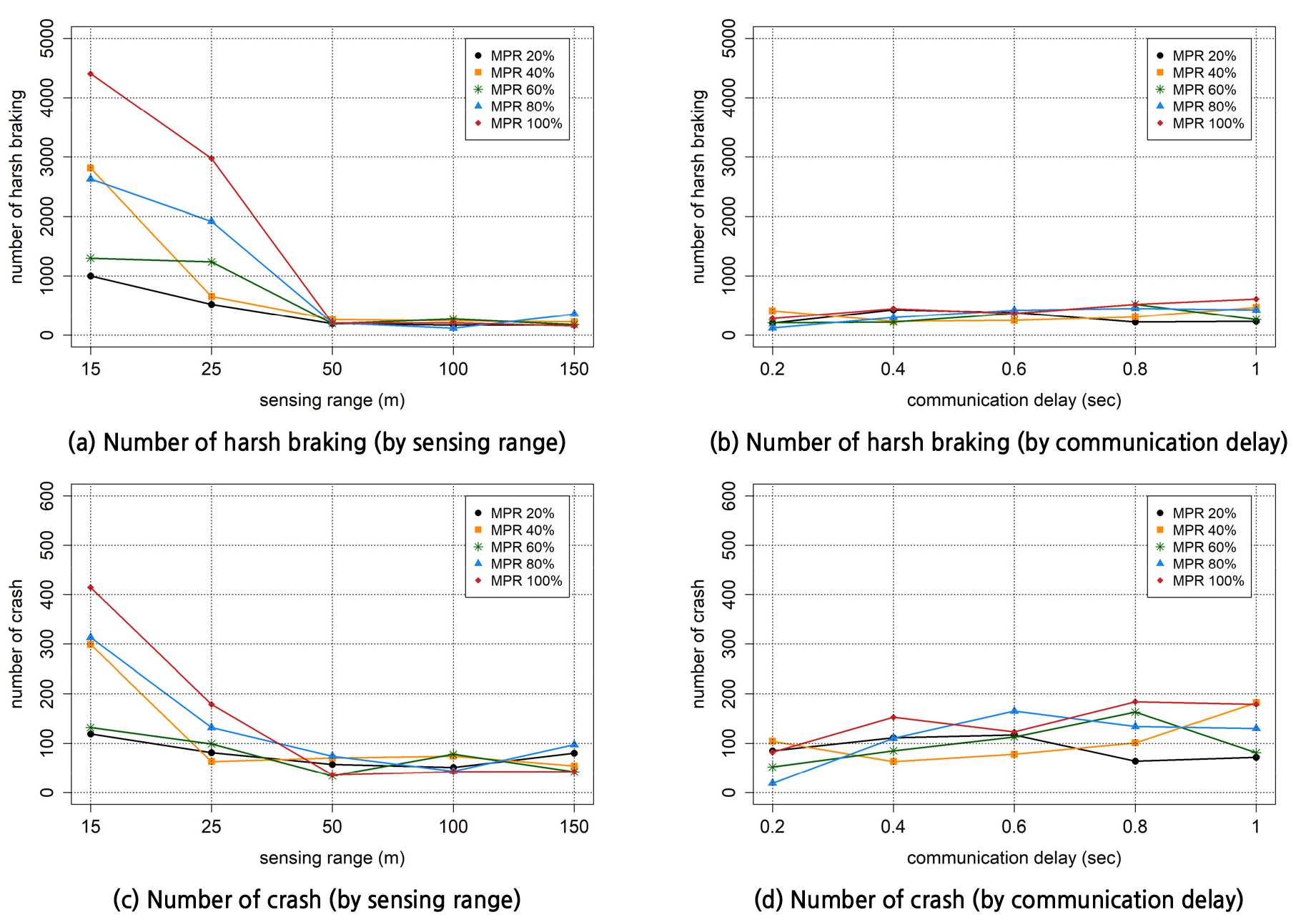
이러한 결과는 이론적으로 당연한 결과이다. 센서의 인지 범위가 감소할수록 위험도는 증가한다. 그러나 본 과제의 목적은 도로교통 운영 측면에서 각종 악의 환경에서도 교통류 안전성 유지를 위하여 자율주행차량 센서 인지 범위의 최소 요건을 찾아가는 데에 필요한 정보를 도출하는 데에 있다. 도로 전체 구간을 보았을 때, 센서의 인지 범위가 25m 이하에서는 급감속 및 사고 발생이 증가하나, 인지 범위 50m 이상에서는 위험 상황 발생이 모든 상황에서 유사한 결과가 나타났다. 도로의 분류, 합류, 일반 구간과 같은 도로의 특성과 차량의 추종 및 차로변경 등 차량의 주행 상황 모두를 종합적으로 따져보았을 때, 이와 같은 결과는 각종 악의 환경에서도 교통류 안전성 유지를 위해서는 자율주행차량 센서 인지 범위는 최소 50m 이상을 유지해야 한다는 점을 시사한다.
반면, 앞서 구간별 분석에서도 보았듯이, V2X 통신 지연 시간은 센서 인지 범위의 영향에 대비하여 급감속과 차량간 상충 횟수에 대한 영향이 미비한 것으로 나타났으며, 통신 지연 시간 변화와 MPR 수준에 의한 일정한 패턴을 보이지 않았다. 본 연구에서 자율주행차량의 행태는 차량의 센서를 기반으로 근거리 상황을 우선적으로 인지하여 주행 판단을 하고, 주변 상황을 인식하는 과정에서 V2X 통신을 기반으로 수집된 정보를 보조적으로 활용하는 것으로 가정하였다. 차량의 센서 인지 성능에 저하가 발생한 경우, 통신 기반 정보 수집에 지연이 없더라도 차량이 최초 주행 판단 시 위험 상황을 인식할 수 있는 범위 자체가 작아 위험 상황에 노출되는 비율이 높다고 할 수 있다. 반대로, 차량 센서의 인지 성능에 저하가 없는 경우에는 통신 기반 주변 상황 정보 수집이 지연이 되더라도 최초 주행 판단 시 위험 상황을 인식하는 범위가 충분하기 때문에 위험 상황 발생 비율이 낮은 편이라 할 수 있다. 따라서 위와 같은 결과는 자율주행차량들이 센서를 기반으로 근거리 상황을 인지하여 우선적으로 주행 판단을 하고, V2X 통신은 주변 상황 정보를 사전에 수집하는 보조적인 역할을 하기 때문에 센서 인지 범위에 대비하여 영향이 미비하게 나타난 것으로 추정된다.
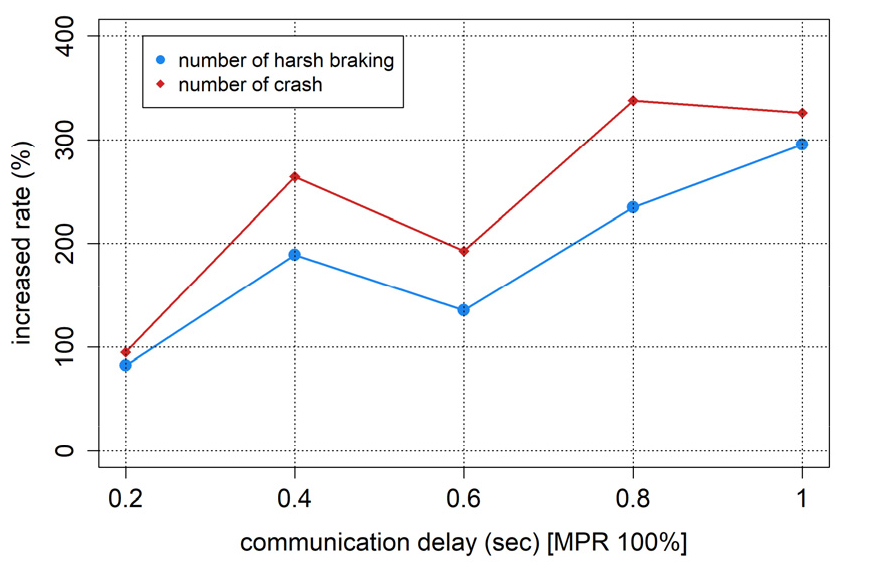
그러나 통신 지연은 센서의 성능에 대비하여 그 영향이 미비할 뿐, 영향이 완전히 없다고 단정 지을 수는 없다. Figure 6은 MPR이 100%이고 차량 센서 인지 범위에 성능 저하가 없을 때(인지 범위 150m) 통신 지연에 의한 급감속 및 차량 간 상충 횟수 증가율을 보여준다. 해당 그래프가 현시하는 바와 같이 통신 지연 시간이 증가할수록 급감속 및 차량 충돌의 발생률이 증가한다. 센서 인지 범위 대비 각 지표에 대한 영향은 미비하나, 통신 지연 자체만으로도 사고 발생의 가능성은 2배 이상인 것으로 나타났다. 따라서 본 연구에서는 통신 지연에 의한 영향에 대한 유의미한 패턴을 도출하지는 못했으나, 해당 영향 자체에 집중한 다양한 추가 연구가 필요할 것으로 보인다.
결론
본 연구는 안개, 비, 눈 등의 기상적인 악의환경을 가정하고 자율주행차량 센서 인지 및 통신 지연 범위의 변화에 따른 도심로 교통류 안전성을 분석하였다. 이를 위하여 VISSIM 시뮬레이션 프로그램 기반의 교통류 안전성 분석 체계를 구축하고, 악의환경에 의하여 변할 수 있는 센서 인지 범위 및 통신 지연의 다양한 변수를 설정하여 이를 해당 시뮬레이션 기반 실험에 적용하였다. 교통류 안전성에 관련된 분석 지표를 제시하고, 시뮬레이션 구현을 통하여 추출한 데이터를 기반으로 분석지표를 산출하고 다양한 시나리오 결과 간 비교분석을 수행하였다.
분석 결과, 센서 인지 범위가 감소할수록 위험도가 증가하는 것으로 나타났다. 실험 대상 도로에서 전반적으로 센서 인지 범위가 50m 이상일 경우에는 위험도가 거의 0에 가까운 것으로 나타났으며, 인지 범위가 25m 이하인 경우에는 위험도가 급격히 증가하는 것을 볼 수 있다. 또한, MPR별 비교를 보면 센서 인지 범위가 높을 시에는 MPR별 차이는 없으나, 센서의 인지 범위가 낮고 MPR이 높을수록 위험도가 높아지는 것으로 나타났다. 이러한 결과는 이론적으로 당연한 결과이나, 본 과제의 목적은 도로교통 운영 측면에서 악의 환경에서도 교통류 안전성 유지를 위하여 자율주행차량 센서 인지 범위의 최소 요건을 찾아가는 데에 필요한 정보를 도출하는 데에 있었다. 도로의 분류, 합류, 일반 구간과 같은 도로의 특성과 차량의 추종 및 차로변경 등 차량의 주행 상황 모두를 종합적으로 따져보았을 때, 이와 같은 결과는 각종 악의 환경에서도 교통류 안전성 유지를 위해서는 자율주행차량 센서 인지 범위는 최소 50m 이상을 유지해야 한다는 점을 시사한다. 이와 같이 본 연구는 도로교통 운영 측면에서 자율주행차량의 센서 인지 범위의 최소 요건에 대한 기본 정보를 찾는 데에 기여도가 있다고 할 수 있다.
그러나 V2X 통신 지연 시간에 의한 영향 분석 결과는 센서 인지 범위의 영향에 대비하여 교통류 안전성에 대한 영향이 미비한 것으로 나타났다. 게다가 통신 지연 시간 변화와 MPR 수준에 의한 뚜렷한 패턴을 보이지 않았다. 이는 자율주행 차량들이 차량의 센서를 기반으로 근거리 상황을 인지하여 주행 판단을 하고, V2X 통신은 중장거리 상황 정보를 사전에 수집하는 보조적인 역할을 하기 때문에 센서 인지 범위에 대비하여 영향이 미비한 것으로 추정된다. 적어도 본 연구에서는 센서 인지 범위 대비 각 지표에 대한 영향은 미비하나, 통신 지연 자체만으로도 사고 발생의 가능성은 2배 이상인 점은 확인하였다. 본 연구에서는 통신 지연에 의한 영향에 대한 유의미한 패턴을 도출하지는 못했으나, 앞으로 통신 지연 발생이 교통류 안전성에 미치는 영향에 대해 심층적인 후속 연구가 필요할 것이며, 센서 인지 성능 저하와 통신 지연이 동시에 발생하는 것을 가정한 복합적 영향에 대한 추가 분석으로 연구 주제를 확장할 필요가 있다.
또한, 본 연구에서는 센서 인지 범위의 저하와 통신 지연의 발생이 모든 자율협력주행 차량에 동일하게 발생하는 것으로 가정하여 시뮬레이션 실험을 수행하였다. 그러나 현실적으로 이와 같은 현상들은 모든 차량에 동시에 발생하지 않고 무작위(random)로 발생하게 된다. 따라서 향후 연구에서는 이와 같은 현실적인 측면을 고려하여, 센서와 통신 성능 저하 상태를 다양하게 구성하고 각종 성능 저하 상황이 차량별로 무작위로 발생하는 시나리오에 대한 실험을 수행하고 그 결과를 분석하여 추가적인 시사점을 도출할 필요가 있다.
