

서론
현재 한국에서 운행 중인 자율주행차는 지정된 시범운행지구 내에서만 주행이 가능하며, 전문 교육을 이수한 Safety Driver가 운전석에 탑승한다. 자율주행 중 주행이 어려운 상황이 발생하면, 차량 또는 Safety Driver가 이를 감지하여 통제권을 차량에서 Safety Driver에게 넘기며, 이러한 과정을 제어권전환(take-over)이라 부른다. Safety Driver는 자율주행이 재개될 수 있을 때까지 차량을 수동으로 조작한다. 미국자동차공학회(SAE)는 국제 표준 J3016에 따라 자율주행 단계를 Level 0에서 Level 5까지 6단계로 구분하며, 제어권전환은 Level 3이상의 단계에서 발생한다.
제어권전환의 주요 요인은 크게 운전자, 차량, 환경으로 나눌 수 있으며, 한국의 경우 법적 요인도 추가적으로 작용한다. 자동차관리법 시행규칙 제26조에 따라 자율주행차는 어린이, 노인, 장애인 보호구역에서 제어권 전환을 의무적으로 수행해야 한다. 이는 교통약자의 안전을 보장하기 위한 규정으로, 해당 보호구역에서는 자율주행 모드에서 수동 모드로 전환하는 절차가 필수적으로 요구된다.
제어권전환에 관한 연구는 전 세계적으로 활발히 진행되고 있으며, 주요 연구 분야로는 운전자의 반응 및 행동 분석, 안전성 향상, 모니터링 및 알림 방식, 비주행 활동 분석, 환경 요인 평가 등 있다. 이러한 연구는 안전하고 효율적인 제어권전환 시스템을 구축을 목표로 하고 있지만, 많은 연구가 여전히 시뮬레이터 실험이나 가상 환경을 중심으로 이루어져, 실제 도로 환경의 다양한 요인을 충분히 반영하지 못하는 한계를 지니고 있다. 실제 도로에서는 횡단보도 위 보행자, 진출입로, U턴 차로, 승하차 지점 등의 요소가 자율주행 운행에 영향을 미칠 수 있으며, 어떠한 요인이 제어권전환에 영향을 미치고 있는지에 대한 연구가 필요하다.
이러한 한계를 보완하기 위해, 본 연구는 자율주행차가 실제 도로에서 운행할 때 발생하는 제어권 전환의 환경적 요인을 분석하고자 한다. 이를 통해 자율주행차 제어권 전환 발생을 줄이고, 안정적이고 효율적인 제어권 전환 시스템을 구축할 방안을 제시하고자 한다.
본 연구에서는 자율주행 운행데이터를 활용하여 제어권 전환이 빈번히 발생하는 구간을 제어권 전환 다발구간으로 정의하고, 이러한 구간을 데이터 분석을 통해 선정한다. 또한, 다발구간의 환경적 특성을 분석하여 자율주행 운행의 안정성을 높이고, 제어권 전환 빈도를 줄이기 위한 방안을 모색한다.
연구의 공간적 범위는 서울 상암 자율주행 시범운행지구 내 자율주행 수요응답형 서비스 노선이 운행되는 구간이다. 상암 자율주행 시범운행지구는 2020년 11월에 국내 최초로 지정된 자율주행차 시범운행지구 중 하나로, 면적은 약 6.6km2이며 도로 길이는 32.9㎞이다. 주요 지역으로는 상암DMC, 노을공원, 하늘공원, 난지천공원, 한강공원, 평화의 공원이 포함되며, 이 지역의 유동인구는 약 20만 명에 이른다. 이 지구에서는 2022년 2월부터 자율주행 수요응답형 서비스가 제공되고 있으며, 본 연구는 A01, A02, A21의 3개 노선에 대한 운행데이터를 분석하였다.
시간적 범위는 2022년 5월부터 2023년 2월까지 총 10개월로 설정하였다. 자율주행차의 유상 운송은 2022년 2월부터 시작되었으나, 데이터 수집 항목이 5월에 변경되었기 때문에 일관된 데이터 분석을 위해 5월 이후의 데이터를 활용하였다.
본 연구는 이러한 자율주행 운행데이터를 기반으로 제어권 전환이 빈번하게 발생하는 다발구간을 정의하고, 해당 구간을 선정하는 방법론을 제시함으로써 자율주행 시스템의 운행 안정성을 향상시키고 제어권 전환의 빈도를 줄일 수 있는 방안을 도출하고자 한다.
선행연구
자율주행 제어권 전환 연구는 크게 세 가지 방식으로 진행되어 왔으며, 이들은 각각 자율주행차 운행 특성 파악을 위한 자료로 사용되고 있다. 첫 번째는 캘리포니아 자동차관리국의 자율차 사고 보고서를 활용하는 방법이다. 이 데이터는 사고 발생 시 운전자와 자율주행 시스템 간의 반응을 비교·분석할 수 있어, 실제 사고 상황에서 제어권 전환 실패나 안전성 문제를 진단하는 데 유용하다. 그러나 이 방법은 사고 상황에서만 데이터를 제공하므로, 다양한 주행 상황에서의 제어권 전환 특성을 파악하는 데 한계가 있다.
두 번째는 시뮬레이션을 통해 자율주행차의 거동 특성을 분석하는 방식이다. Namkung et al.(2020), Kwon (2022), Jang et al.(2023), Hwang et al.(2023) 등의 연구는 시뮬레이션 환경에서 제어권 전환 요청 방식과 알림 디자인이 운전자에게 미치는 영향을 분석하여, 작업 부하 감소와 상황 인식 개선을 위한 최적의 알림 방식을 설계하고자 했다. 또한, Kim et al.(2018), Han et al.(2019), Oh(2022), Kim(2020), Lee et al.(2023), Lim et al.(2021), Hong et al.(2022)은 시뮬레이션 환경에서 운전자 모니터링 기술을 활용하여 제어권 전환 시 운전자의 상태를 평가하고, 수면 및 비주행 과제 수행이 제어권 전환 능력에 미치는 영향을 분석하였다. 이들 연구는 운전자의 주의력과 상태를 실시간으로 모니터링하여, 제어권 전환 성공률을 높이기 위한 실시간 상태 반영 시스템의 필요성을 강조하였다. 시뮬레이션은 다양한 주행 시나리오를 재현할 수 있으나, 실제 도로 환경과의 차이로 인해 한계가 있다. 이러한 연구는 초기 단계의 검증이나 위험성이 높은 시나리오에 유용하지만, 현실적인 주행 상황을 완전히 반영하지는 못한다.
세 번째로 실제 자율주행 운행데이터를 활용하는 연구가 있으며, 이는 자율주행차가 실제 운행 환경에서 수집된 데이터를 통해 더 현실적인 운행 특성을 반영할 수 있다. 예를 들어, Lee et al.(2024)은 Level 3 자율주행 버스의 실제 주행 데이터를 이용해 제어권 전환에 영향을 미치는 요인을 분석하였으며, Kim et al.(2023)은 자율주행 ODD(Operational Design Domain) 구성 요소에 따른 공간적 요인이 자율주행 안전성에 미치는 영향을 연구하였다. 또한, Lim et al.(2021)과 Lee et al.(2023)은 판교제로시티 등 실제 도시 환경에서의 운행데이터를 활용하여 자율주행차 운행 안전성을 위한 모니터링 지표를 개발하였다. 이와 같은 실제 데이터 기반 연구들은 시뮬레이션의 한계를 극복하고, 실제 도로 환경에서 자율주행차의 제어권 전환 빈도와 특성을 더 정확히 파악할 수 있도록 돕는다.
이러한 기존 연구를 바탕으로, Table 1에서는 각 분석 방식별 대표 연구와 그에 따른 주요 발견 및 시사점을 요약하여 제시하였다.
Table 1.
Key implications from previous studies
본 연구는 국내 Lv.3 자율주행차의 실제 운행데이터를 기반으로 제어권 전환 지점의 분포, 빈도, 그리고 변화 추이를 파악하고, 자율주행 운행 환경에서의 제어권 전환 다발 구간을 도출하고자 한다는 점에서 차별성을 지닌다. 기존 연구들은 주로 시뮬레이션 환경이나 해외 데이터를 활용하여 제어권 전환의 효과를 확인하는 데 중점을 두었으나, 본 연구는 실제 도로 환경에서 수집된 데이터를 사용하여 제어권 전환이 자주 발생하는 구간을 분석하고 해당 구간의 환경적 요인을 조사한다.
특히 본 연구는 제어권 전환 다발 구간의 특성을 분석하여, 자율주행 중 예상되는 제어권 전환 지점을 미리 알려줌으로써 Safety Driver가 사전에 대비할 수 있는 정보를 제공하고자 한다. 이는 자율주행의 운행 안정성을 높이는 데에 기여할 수 있으며, 다발 구간의 환경적 요인을 분석하여 향후 제어권 전환 발생 가능성이 높은 구간을 예측하고 예방할 수 있는 자료로 활용될 것이다. 따라서 본 연구는 기존 시뮬레이션 중심 연구의 한계를 보완하고, 자율주행차 상용화와 안전성을 높이는 데 필요한 현실적 자료와 방안을 제시한다는 점에서 의의가 있다.
자율주행 서비스 소개
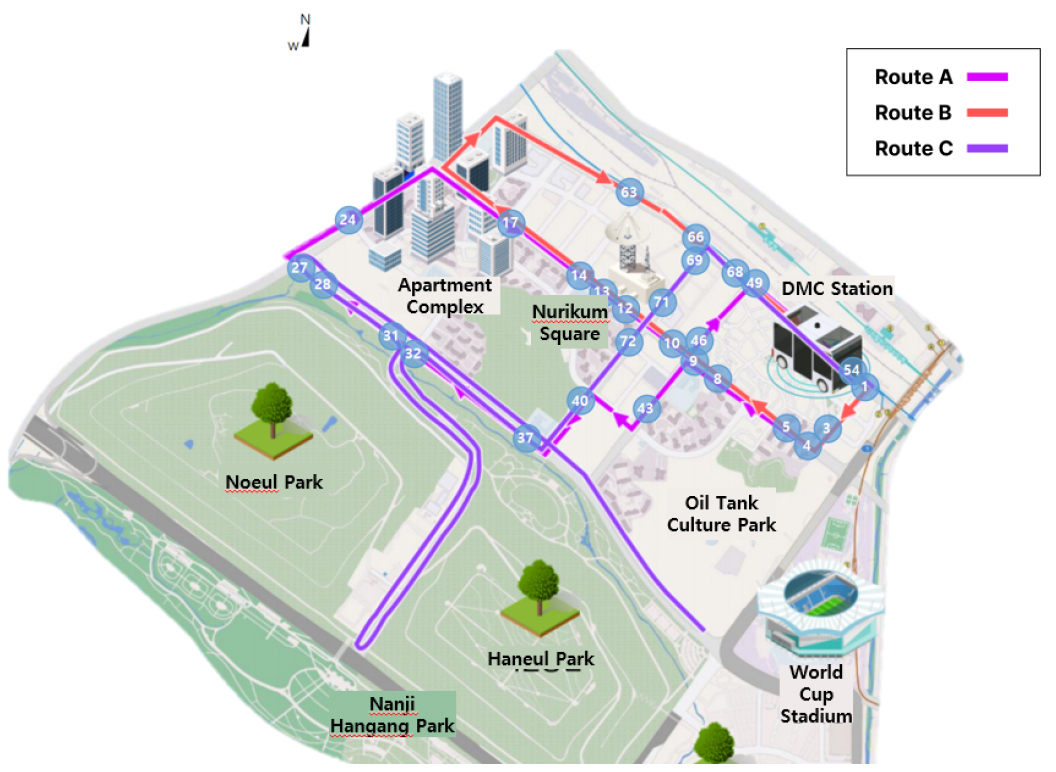
분석 데이터는 상암 자율주행차 시범운행지구 내 자율주행차의 운행데이터이다. 이 자율주행차는 수요응답형 서비스를 제공하며, 2022년 2월부터 유상 운송으로 전환되어 상암 곳곳에서 시민의 교통수단으로서 역할을 하고 있다. 본 연구에서는 분석의 일관성을 유지하고 실제 노선명을 보호하기 위해, 해당 지구 내 노선을 A, B, C 노선으로 표기하여 분석에 활용하였다. Figure 1에 상암 자율주행차 시범운행지구 내 각 노선를 나타냈다.
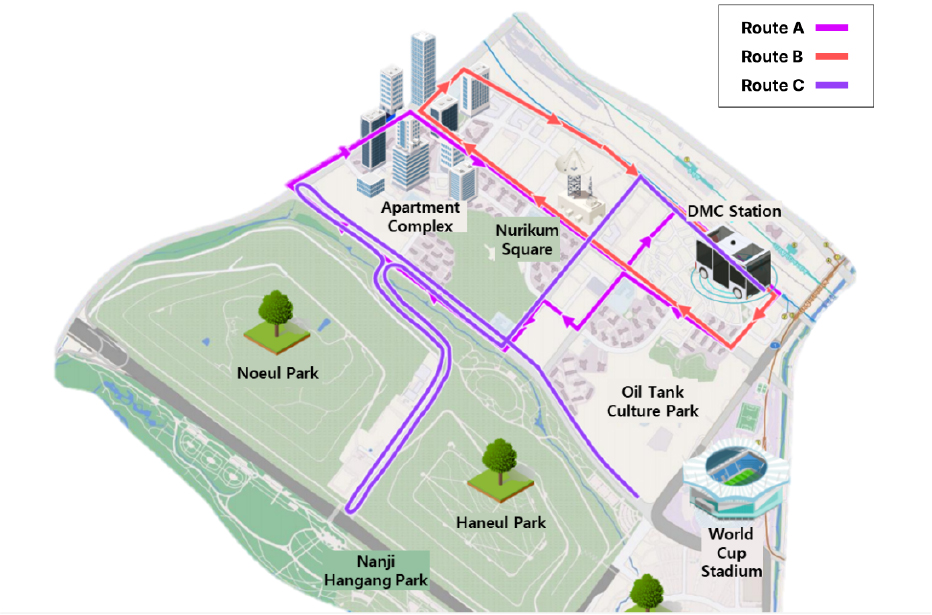
A 노선은 14개 정류장으로 구성되며, 지하철역과 아파트를 연결하는 수요응답형 서비스로 운영된다. 총 3대의 차량이 월요일부터 토요일 오전 9시 30분부터 오후 3시 30분까지 운행되며, 요금은 2,000원이다. 이 노선은 교차로 간격과 차로 수가 중간 수준으로 비교적 안정적인 주행 환경을 제공한다.
B 노선은 15개 정류장으로 지하철역과 오피스를 연결하며, 총 2대가 월요일부터 금요일 오전 9시 30분부터 오후 4시 30분까지 운행된다. 요금은 2,000원이다. 주요 교차로 간격이 가장 짧고 운행 거리가 가장 짧아 교차로 밀집 환경에서 운행된다.
C 노선은 10개 정류장으로 지하철역과 공원을 연결하며, 화요일부터 금요일 오전 10시부터 오후 4시 30분까지, 토요일은 오전 11시부터 오후 3시 30분까지 1대의 차량이 운행된다. 요금은 1,200원이며, 차로 수가 적고 교차로 간격이 길며 운행 거리가 가장 긴 특징을 가진다.
위 서비스는 TAP! 앱을 통해 예약 가능하며, A 노선은 최대 2인 탑승 가능한 기아 니로 EV, B 노선은 휠체어 탑승 가능한 기아 카니발(최대 6인), C 노선은 최대 10인 탑승 가능한 현대 쏠라티 차량이 운행된다.
분석 방법론
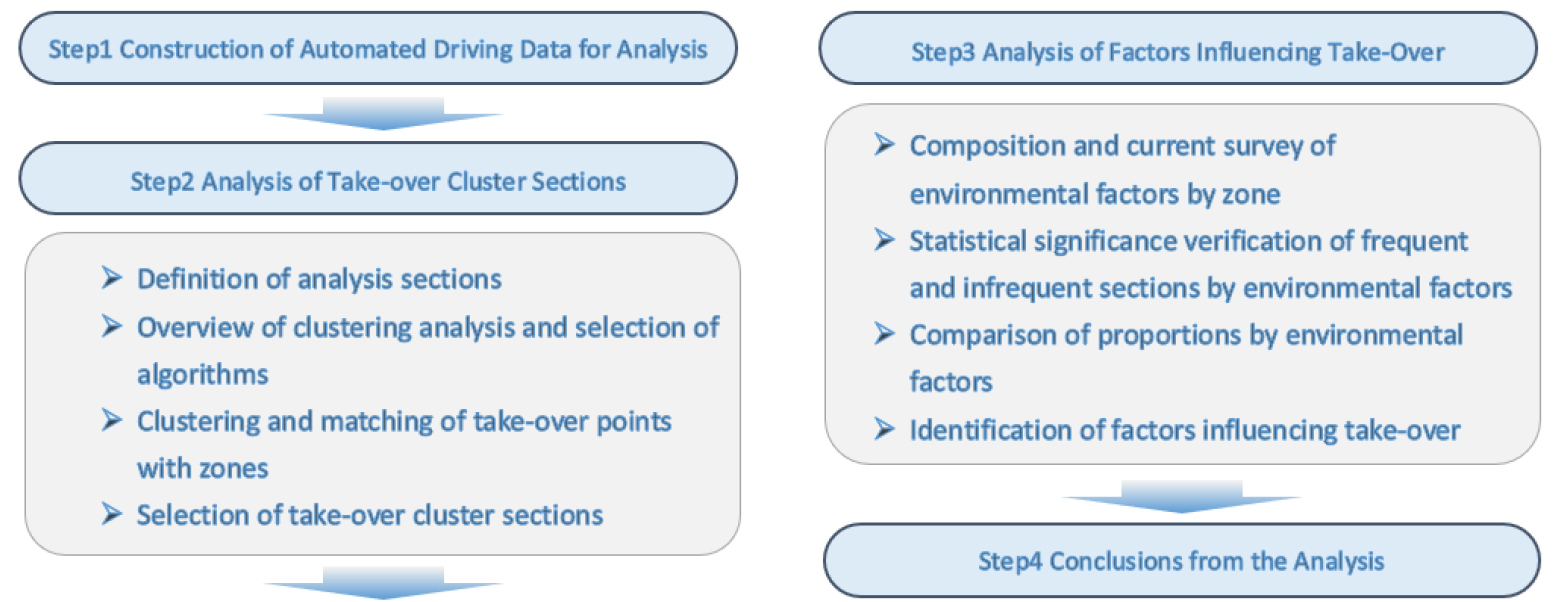
먼저, 운행데이터를 분석에 적합한 형태로 가공하기 위해 전처리 과정을 수행하고, 제어권 전환의 월별 및 노선별 빈도 특징을 살펴봄으로써 데이터에 대한 이해를 높인다. 이후 분석은 제어권 전환 다발구간 분석과 제어권 전환 요인 분석으로 구분된다.
제어권 전환 다발구간은 운행 구간 내에서 제어권 전환이 자주 발생하는 특정 지점을 의미한다. 이러한 다발구간을 파악하기 위해 전체 운행 구간을 분석 존으로 세분화한다. 제어권 전환이 자주 발생하는 지점을 찾기 위해 제어권 전환 지점을 밀도 기반의 군집화 기법을 통해 클러스터링하며, 군집화되지 않은 제어권 전환 지점은 제외하여 유효한 군집만을 생성한다. 마지막으로, 생성된 군집과 분석 존을 매칭하여 제어권 전환 다발구간을 선정한다.
선정된 제어권 전환 다발구간과 비다발구간을 비교하여 제어권 전환 요인을 분석한다. 먼저, 제어권 전환에 영향을 미칠 것으로 예상되는 요인을 선정하고, 모든 분석 존에서 각 요인의 환경적 특성을 조사한다. 이후 다발구간과 비다발구간 간의 각 환경 요인에 대해 통계적 유의성을 검증하고, 요인별 비율을 비교하여 제어권 전환에 영향을 미치는 주요 요인을 도출한다. Figure 2에서 분석 절차를 도식화하여 나타냈다.
1. 운행데이터
1) 운행데이터 전처리
분석 데이터는 2022년 5월부터 이듬해 2월까지 수집하였다. 데이터는 1초 단위로 수집된 운행데이터이며 날짜, 시간, 차량번호, 위도, 경도, 주행 방법, 통신 상태, 이 수집되었다. Table 2에 수집된 데이터 항목을 정리 하였다.
Table 2.
Field specification table
차량 운행데이터의 주행 방법은 수동주행과 자율주행으로 구분된다. 자율주행 중 어떤 이유로 제어권전환을 하게 되었는지에 대한 기록 데이터와 승객 탑승 유무는 수집되지 않았다. 본 연구에서 제어권전환 지점은 자율주행에서 수동주행으로 제어권전환 지점의 데이터를 추출하여 사용하였다. 수집된 운행데이터는 총 23,205,549행으로, 제어권전환 지점 추출 시 4,968,794행으로 분석되었다. 이 값은 총 데이터가 23,205,549초(약 6,445시간) 동안 수집되었다는 의미이며, 운행 중 제어권전환을 4,968,794회 했다는 의미다.
각 노선의 자율주행차는 운행을 시작하기 전 차고지에서 시범운행지구까지 수동 주행으로 이동한다. 또한 승차지점에서 출발하는 경우와 하차지점에서 정지하는 경우 모두 수동으로 주행하였다.
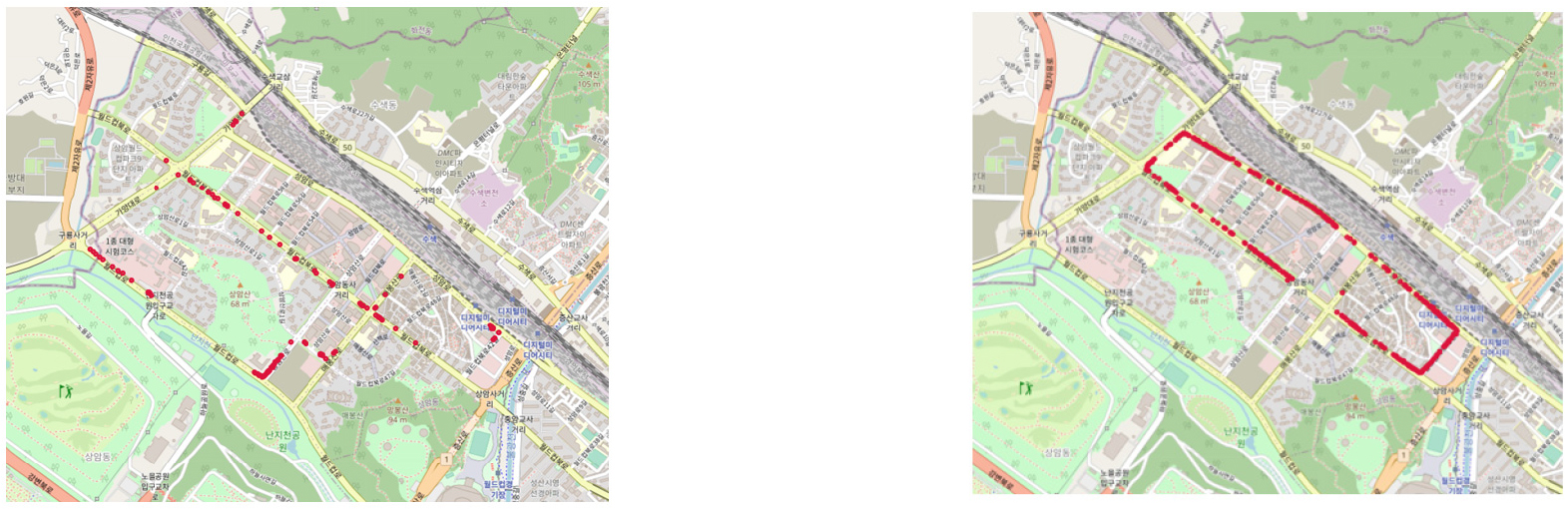
Figure 3은 수집된 제어권전환 지점의 위치를 해당 맵 상에 나타낸 예시이다.
운행데이터로 분석을 시작하기에 앞서, 본 연구에서는 Python을 이용해 제어권 전환 데이터를 전처리 과정을 수행하였다. 먼저 데이터를 월별, 시간대별, 노선별로 분류하여 제어권전환 패턴을 비교할 수 있는 기반을 마련하였다. 각 파일에서 수동 주행에서 자율주행으로 전환 후 다시 수동 주행으로 돌아가는 제어권 전환 지점을 추출하였으며, 상암지구 경계를 벗어난 지점은 분석에서 제외하였다. 이후, 각 파일 내 제어권 전환 지점이 30개 이하인 경우에는 데이터의 신뢰성을 위해 해당 파일을 삭제하였다. 이러한 전처리를 통해 군집화에 적합한 데이터셋을 구성하여 제어권전환 지점의 특성을 분석할 수 있었다. Figure 4는 분석에 활용한 상암지구의 위경도 값을 보여준다.

2) 운행데이터 변화 패턴
이후 대략적인 제어권전환의 변화 패턴을 살펴보았다. 먼저, 월별로 주행시간과 제어권전환 수가 어떻게 변화하는지 살펴보았다. Table 3과 Figure 5에 나타난 추이를 보면 하절기와 동절기에 주행시간과 제어권전환 수가 감소했음을 알 수 있다.
Table 3.
Monthly driving time and number of take-overs

이를 통해 자율주행차가 하절기에는 강수의 영향을, 동절기에는 도로 상황의 영향을 받는 것을 유추해볼 수 있었다. 이에 더해 노선별로 제어권전환이 어떻게 일어나고 있는지는 알기 위해 빈도 분석을 수행했다. 제어권전환 빈도는 주행시간 당 제어권전환이 얼마나 자주 발생했는지를 나타내는 값이다. 해당 빈도 분석은 월별, 노선별로 나누어 진행하였고 결과 값은 Table 4, Figure 6에서 확인할 수 있다. 계산식은 Equation 1과 같다.
Table 4.
Route-specific take-over frequency
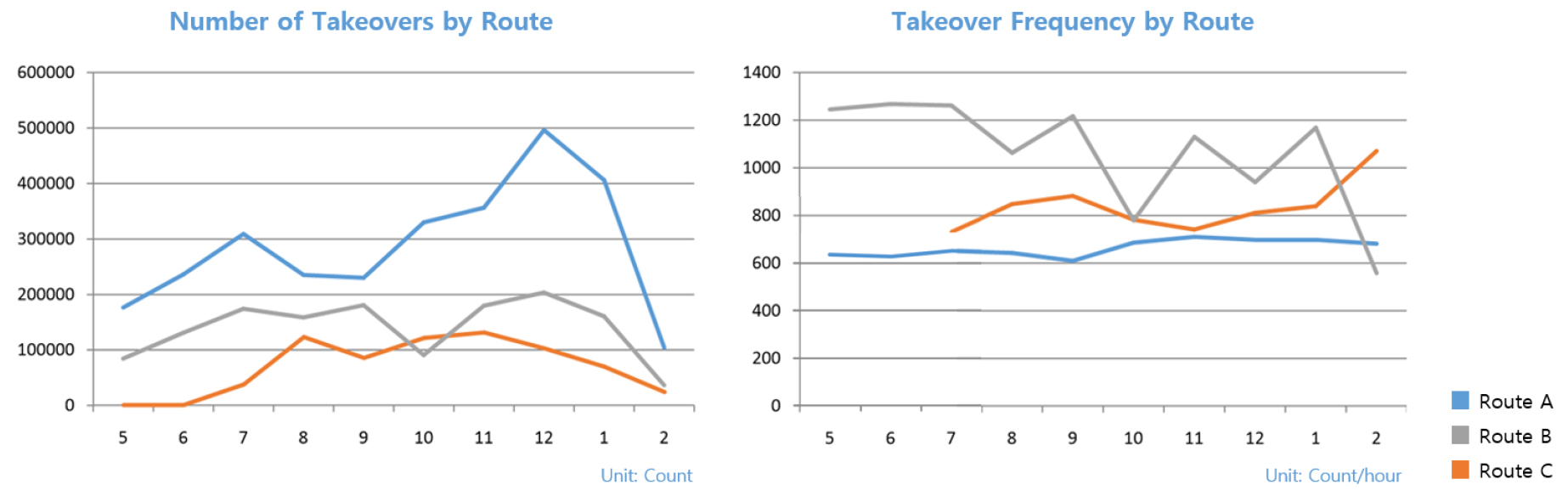
위 표는 노선별로 월별 제어권 전환의 수와 빈도를 비교한 것이다. 각 노선은 서로 다른 업체가 운영하며, 각 업체는 시범운행지구 내에서 자사가 보유한 자율주행 기술을 활용해 차량을 운행하고 있다. 운영 과정에서 수집된 데이터를 바탕으로 기술을 지속적으로 수정·보완하며 고도화 작업을 수행하고 있다.
A 노선은 주행 시간이 가장 긴 노선임에도 불구하고 제어권 전환 빈도가 지속적으로 낮고, 편차 또한 적게 나타났다. 반면 B 노선은 서비스 초기 제어권 전환 빈도가 가장 높았으나, 시간이 지남에 따라 점차 감소하여 2023년 2월에는 제어권 전환 빈도가 가장 낮아졌다. C 노선은 가장 늦게 서비스를 시작했으며, 주행 시간이 점차 감소하는데도 불구하고 제어권 전환 빈도는 증가하는 경향을 보였다.
2. 제어권전환 다발구간 분석
1) 분석구간 정의
제어권전환 다발구간을 분석하기 위해서는 먼저 분석 구간의 정의가 필요하다. 정의한 후에는 운행 구간을 분석 존으로 나눈다. 제어권전환 발생이 자주 일어나는 지점을 찾기 위해서는 군집화를 수행한다. 대표적인 군집화 알고리즘을 비교하여 선택 후 제어권전환 지점을 군집화하여 해당 군집과 분석 구간을 매칭시킴으로서 제어권전환 다발구간을 선정한다.
제어권전환 다발구간을 선정하기에 앞서, 자주 발생하는 구간에 대한 기준 빈도와 공간적 범위 기준을 세우기 위해 관련 선행 연구를 검토했다. 이 중 한국교통안전공단(Korea Transportation Safety Authority, 2011)에서 사고가 자주 발생하는 구간을 관리하고 개선하기 위해 사용하는 사고다발지점의 기준이 제어권전환 다발구간에 활용하기에 적절하다고 판단하여 해당 기준을 사용하였다.
사고다발지점은 기준년도를 포함한 과거 3년간 반경 50m이내에 5건 이상 사고가 발생한 지점을 말한다. 이에 따라 제어권전환 다발구간의 반경은 50m로 설정하였다. A, B, C 노선 전체 운행 구간을 반경 50m 구간으로 나누어 총 97개의 존으로 구분하였으며, 1번부터 97번까지 번호를 명명하여 분석에 활용하였다.
해당 단위 반경이 본 연구에 적절한지 검토하기 위해 주요 교차로의 평균 간격을 측정하였다. 상암 시범운행지구 내 자율주행차가 운행하는 경로에 위치하고 있는 주요 교차로는 총 33곳이고, 측정된 교차로 간격 값은 28개이다. 계산 결과, 교차로 간의 평균 거리는 178.7m로, 설정한 50m 반경 설정이 교차로를 적절히 포함함을 확인하였다. Figure 7에서는 지도 위에 주요 교차로 지점과 97개의 존을 나타냈다

2) 군집화 모형 선택
운행 구간 내 제어권전환 발생이 자주 일어난 지점을 찾기 위해서 제어권전환 지점을 군집화하여 군집화 되지 않은 제어권전환 지점을 삭제할 수 있는 군집화 알고리즘을 찾는다.
K-means Clustering 알고리즘은 데이터를 K개의 군집으로 나누는데 사용되는 가장 일반적인 알고리즘 중 하나이다. 이 알고리즘은 각 데이터 포인트를 가장 가까운 중심에 할당하고 중심을 업데이트하여 군집을 형성한다. 군집의 개수 K를 사전에 정의해야한다.
DBSCAN 알고리즘은 밀도 기반 군집화 알고리즘으로, 밀도가 높은 지역을 군집화하고 더 낮은 밀도의 지역을 노이즈로 처리한다. 군집의 개수를 미리 정의할 필요가 없고, 군집의 밀도와 모양에 대한 제약이 적다.
Hierarchical Clustering 알고리즘은 데이터를 트리 구조로 군집화하는 방법이다. 이 트리는 데이터를 서로 다른 수준의 세분화로 표현하여 원하는 수준의 군집화로 줄일 수 있다.
위 3가지의 대표적인 군집화 알고리즘의 방법론을 비교하여 본 연구의 해당 작업을 적절하게 수행하기 위한 군집화 알고리즘은 DBSCAN으로 선정하였다. DBSCAN은 군집의 개수를 사전에 정의할 필요가 없어, 불규칙하게 발생하는 제어권전환 지점을 유연하게 군집화할 수 있다. 또한 밀도가 낮은 지역을 노이즈로 처리하여 주요 다발구간만을 추출할 수 있어, 불필요한 데이터를 제거하고 분석의 정확성을 높일 수 있다. 마지막으로, DBSCAN은 군집의 모양에 제한이 없으므로, 자율주행차 운행 경로를 따라 다양한 형태로 분포된 제어권전환 지점을 효과적으로 군집화할 수 있다. 이처럼 DBSCAN의 특성은 본 연구의 목적에 부합하여, 주요 다발구간을 식별하는 데 적합하다고 판단하였다.
3) 제어권전환 다발구간 분석 및 결과
전처리를 마친 데이터는 Python의 sklearn.preprocessing 라이브러리의 StandardScaler 함수를 사용해 정규화 작업을 하고, sklearn.cluster 라이브러리의 DBSCAN 함수를 이용해 군집화를 수행한다.
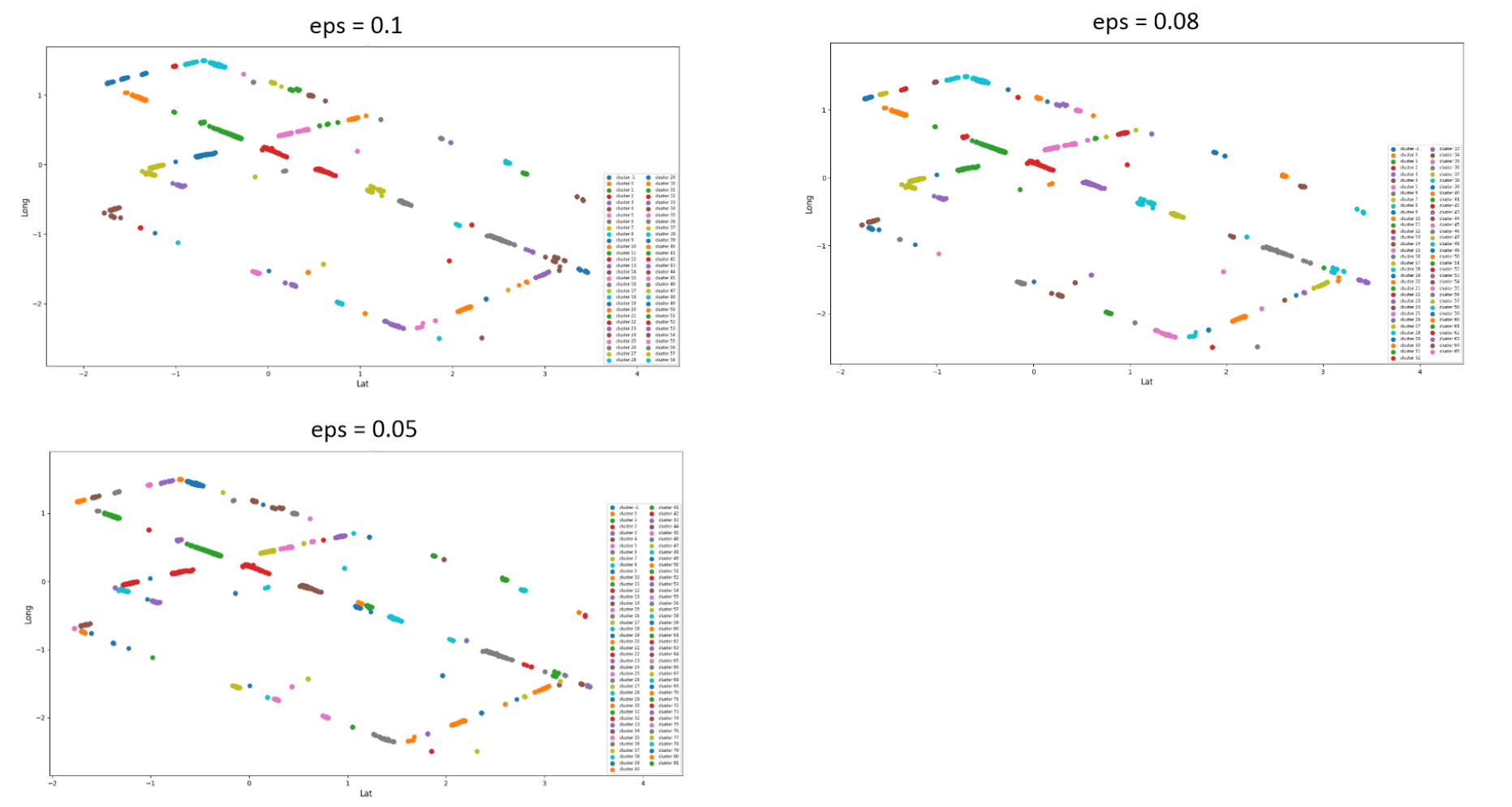
Python에서 DBSCAN 알고리즘을 수행할 때는 eps와 min_samples 값을 지정해주어야 한다. 여기서 eps값은 군집의 반경을 뜻하며, min_samples는 군집 내 최소 샘플수를 뜻한다. 기본값은 eps=0.5, min_samples=5이다. 본 연구의 경우 분석 구간을 반경 50m로 설정했으므로 군집화 알고리즘 수행 시 군집의 크기가 반경 50m에 가깝도록 eps값을 조정하여 eps=0.08이라는 값을 사용하였다.
min_samples 값은 제어권전환 지점이 일정한 밀도로 분포하는 구간에서 군집화의 신뢰성을 확보하기 위해 기본값 min_samples=5로 설정하였다. 만약 min_samples 값을 높이거나 낮추면 일부 지점이 노이즈로 분류되거나 작은 군집이 더 많이 형성될 수 있지만, 기본값인 min_samples=5가 본 연구의 목적에 적합하다고 판단했다. Figure 8에서 eps 값에 따른 군집 모양을 확인할 수 있다.
분석은 Python의 sklearn.cluster 라이브러리의 DBSCAN 함수와 sklearn.preprocessing 라이브러리의 StandardScaler 함수를 이용하여 군집분석을 수행했다. 이렇게 군집분석을 진행한 후에 도출된 Plot은 해당 노선에 맞는 존과 매칭하여 counting 작업을 진행하였다. Figure 9은 해당 절차의 예시이다.
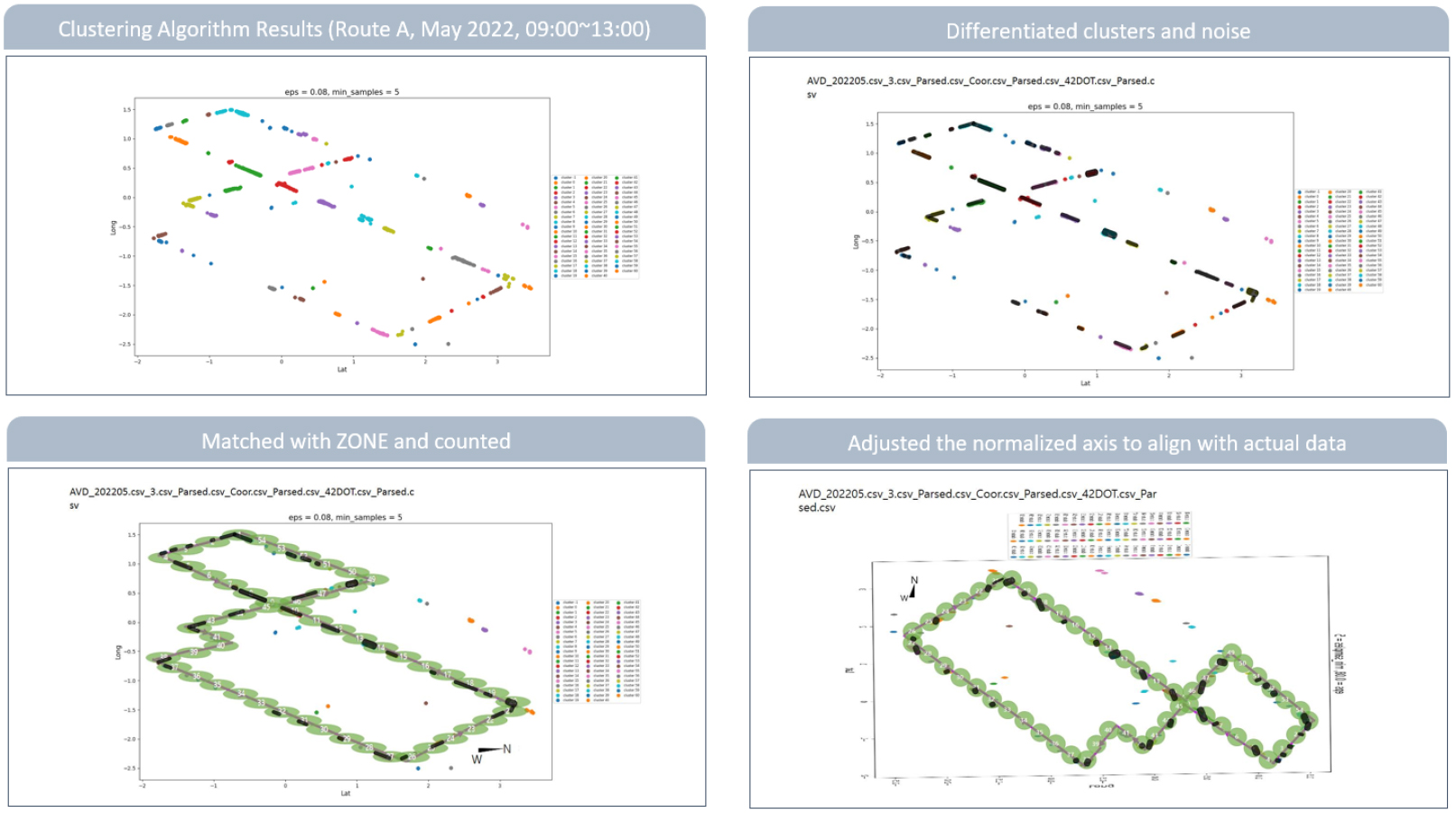
제어권전환 군집과 존과의 매칭에 따라 도출한 제어권전환 다발구간을 선정한다. 분석 결과, 제어권전환이 자주 발생하는 구간은 운행 지역 97개 존 중, 28개 존으로 나타났다. 해당 다발구간에는 규제에 따라 필연적으로 제어권전환이 발생하는 어린이보호구역과 승하차 지점이 포함되어 있어 제어권전환이 자주 발생하는 지점이 선정되었음을 확인할 수 있었다. Figure 10에서 제어권전환 다발구간 위치를 나타냈다.
3. 제어권전환 요인 분석
1) 환경 요인 구성
본 연구에서는 관련 선행연구를 바탕으로, 제어권전환에 영향을 미칠 수 있는 잠재적인 환경적 요인을 선정하였다. Kim et al.(2023)은 정적 ODD 구성요소 중 자율주행 안전성에 영향을 미치는 공간적 요인을 분석하였다. 분석 결과, 횡단보도, 신호등, 교차로, 자전거도로, 포켓차로, 주의표지판, 중앙분리대가 영향을 미치는 것으로 나타났다.
Lee et al.(2024)은 자율주행버스 실주행 데이터를 활용하여 제어권전환 영향 요인을 분석하였다. 분석 결과, 제어권전환 발생 비율을 높이는 환경 요인으로는 교차로와 버스정류장, 횡단보도 수, 진출입로, 안개와 비로 나타났다.
이를 통해 본 연구는 교차로 형태, 진입로 개수, 왕복 차로수, U턴 차로 개수, 횡단보도 개수, 어린이보호구역, 승하차 지점, 버스정류장 개수 총 8가지 환경 요인을 선정하였다. 이러한 정적 요인의 선정은 Lv.4 자율주행 상용화 시 제어권전환 가능성에 대한 정보 제공, 우회경로 생성 등 안전을 보장하는 기능 도출에 활용될 수 있을 것으로 보인다.
2) 환경 요인 조사 및 통계적 유의성 분석
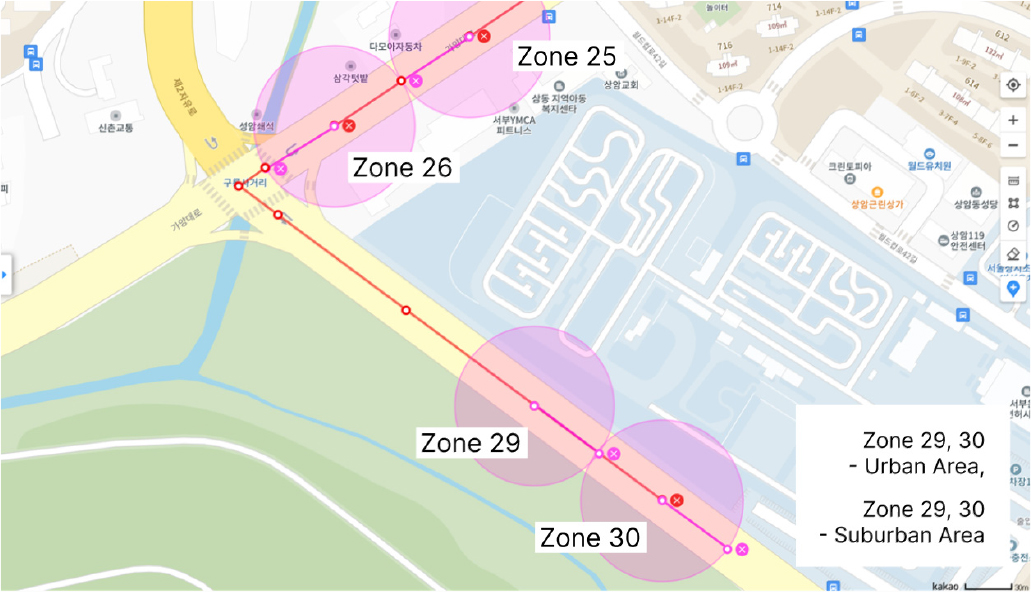
본 연구는 A, B, C 노선의 전체 운행 구간을 반경 50m 단위로 세분화하여 총 97개의 존으로 구분한 뒤, 각 존의 환경 요인 현황을 조사하였다. 환경 요인은 교차로 형태, 진입로 개수, 왕복 차로수, U턴 차로 개수, 횡단보도 개수, 어린이보호구역 유무, 승하차 지점 유무, 버스정류장 개수 총 8가지로 구성되었다. 이 데이터는 카카오맵의 일반·위성지도, 로드뷰, 거리재기, 반경재기 기능을 활용하여 수집되었다. Figure 11은 해당 작업의 예시다.
다발구간과 비다발구간의 환경 요인 차이를 평가하기 위해 독립표본 t-검정을 수행하였다. 다발구간은 제어권 전환이 자주 발생한 구간, 비다발구간은 제어권 전환 빈도가 낮은 구간으로 정의되었다. 각 구간에서 평균은 해당 환경 요인의 수 또는 존재 여부를 나타낸다. 예를 들어, 교차로 여부는 0(없음)과 1(있음)으로 정의되고, 횡단보도 개수는 각 구간에서 실제 개수로 측정되었다.
귀무가설() : 다발구간과 비다발구간의 평균은 유의미한 차이가 없음
대립가설() : 다발구간과 비다발구간의 평균은 유의미한 차이가 있음
Equation 2에서 과 는 각각 첫 번째와 두 번째 집단의 평균을 나타낸다. 와 는 각 집단의 표준편차이며, 과 은 각 집단의 샘플 크기이다. t-검정은 Python의 scipy.stats 라이브러리의 ttest_ind 함수를 사용하였으며, 유의수준은 5%로 설정하였다.
전체 노선에 대한 t-검정 결과, 승하차 장소 유무, 교차로 유무, 횡단보도 1개, 횡단보도 3개, 횡단보도 4개에서 통계적으로 유의미한 차이가 있는 것으로 나타났다. 노선별 특징을 파악하기 위해 추가로 실시한 t-검정 결과는 다음과 같다. A 노선에서는 다발구간과 비다발구간 간 통계적으로 유의미한 요인을 확인할 수 없었다. B 노선에서는 어린이보호구역 유무에서 유의미한 차이가 나타났다. C 노선에서는 승하차 장소, 교차로 유무, 왕복 차로수, 횡단보도 1개, 횡단보도 4개 요인에서 통계적으로 유의미한 차이가 확인되었으며, 나머지 요인에서는 유의미한 차이가 나타나지 않았다.
본 연구에서는 연구의 핵심적인 결과를 보다 효과적으로 전달하기 위해 Table 5에서는 통계적으로 유의미한 차이가 확인된 요인에 대해서만 검정통계량 값을 제시하였다.
Table 5.
T-Test results for statistically significant factors by route
3) 환경 요인 빈도 분석
본 연구에서는 비다발구간에 비해 다발구간에서 높은 빈도로 존재하는 환경 요인을 식별하기 위해 각 환경 요인이 다발구간과 비다발구간에서 나타나는 빈도를 비교하였다. 이 빈도는 각 환경 요인이 각 구간 내에서 관찰되는 빈도를 나타낸다.
비교한 항목은 어린이보호구역, 승하차장소, 교차로 유무, 3지 교차로, 4지 교차로, 진출입로 유무, 진출입로 1개, 진출입로 2개, 진출입로 3개, 왕복차로수, U턴 차로 유무, U턴 차로 1개, U턴 차로 2개, U턴 차로 3개, 횡단보도 유무, 횡단보도 1개, 횡단보도 2개, 횡단보도 3개, 횡단보도 4개, 버스정류장 유무, 버스정류장 1개소, 버스정류장 2개소, 버스정류장 3개소로 총 23개 항목이다. 왕복 차로수의 경우에는 비다발구간에 비해 다발구간에서 평균 차로수 값이 큰 경우 차로수가 제어권전환에 영향을 미치는 것으로 보았다.
Table 6에서 해당 분석 결과를 표로 정리하였다.
Table 6.
Factors with higher proportion in frequent accident areas
4) 환경 요인 선정
제어권전환에 영향을 미치는 환경요인을 선정하기 위해 통계적으로 유의미한 차이가 있으면서 다발구간에서 많이 나타나고 있는 요인을 선정하는 단계를 거쳤다. 전체 노선에는 교차로유무, 횡단보도 3개, 횡단보도 4개의 요인이 제어권전환에 영향을 미치는 것으로 나타났다. A 노선과 B 노선에는 제어권전환에 영향을 미치는 요인이 나타나지 않았다. C 노선에서는 교차로 유무와 왕복 차로수가 제어권전환에 영향을 미치는 요인으로 나타났다.
결과적으로 교차로가 있는 구간과 왕복 차로수가 많은 구간, 횡단보도가 3개 이상 있는 구간에서 제어권전환이 자주 발생하고 있음을 알 수 있었다.
연구 결론
본 연구는 실제 운행데이터를 활용하여 제어권 전환 다발구간을 도출하고, 제어권전환에 영향을 미치는 주요 요인을 분석함으로써 자율주행 서비스의 운영을 개선하기 위한 방안을 제시하였다.
우선, 제어권전환 지점을 군집화하여 총 28개의 제어권 전환 다발구간을 선정하였다. 이러한 다발구간 정보는 자율주행차 운전자에게 제공할 경우 제어권 전환 준비를 가능하게 하여 운행 안전성과 효율성을 향상시킬 수 있을 것으로 기대된다. 또한, 자율주행 기술 개발자에게 해당 정보를 제공함으로써 기술 고도화와 서비스 품질 개선에 기여할 수 있을 것으로 보인다.
다발구간과 비다발구간의 환경적 요인을 비교한 결과, 제어권 전환에 영향을 미치는 주요 요인을 도출하였다. 분석에 따르면, 교차로가 있는 구간, 왕복 차로 수가 많은 구간, 횡단보도가 3개 이상인 구간에서 제어권 전환이 빈번하게 발생하는 것으로 나타났다. 특히, C 노선에서는 교차로와 왕복 차로 수가 많은 구간에서 제어권 전환 빈도가 높은 경향을 보였다.
결론적으로, 교차로가 있는 구간은 교차로가 없는 구간보다 제어권 전환이 더 자주 발생하며, 왕복 차로 수가 많은 구간 역시 제어권 전환 빈도가 높다는 점이 확인되었다. 이를 바탕으로, 제어권 전환 다발구간 정보를 활용하여 다른 운행지구에서도 잠재적인 다발구간을 사전에 예측하고 대응 전략을 마련함으로써 자율주행 서비스의 안정성과 효율성을 높이는 데 기여할 수 있을 것이다.
향후 연구과제
본 연구는 데이터의 한계로 인해 제어권 전환의 구체적인 원인을 직접 분석하지 못했다. 운행 데이터만을 활용하여 주행 경로와 상태를 분석했으나, 제어권 전환 원인을 포함한 리포트 데이터를 추가로 활용한다면 보다 심층적인 분석이 가능할 것이다.
또한, 연구의 공간적 범위가 상암 자율주행 시범운행지구로 한정되어 다른 시범운행지구의 도로 환경 요인을 반영하지 못했다는 점도 한계로 지적된다. 다양한 시범운행지구를 포함한 추가 연구를 통해 지역별 도로 환경과 제어권 전환 간의 상관관계를 분석함으로써 일반화된 결과를 도출할 수 있을 것이다.
운행 데이터 변화 패턴에 대한 추가 분석도 필요하다. 요일별 제어권 전환 빈도와 출퇴근 시간대의 패턴 변화를 분석하고, 구간별 제어권 전환 빈도와 차종별(승용차, SUV, 버스 등) 제어권 전환 경향을 비교하는 방식으로 데이터의 세부적인 특성을 파악할 수 있다.
공휴일과 축제 기간, 날씨(맑음, 비, 눈, 안개 등)와 같은 조건에서 제어권 전환 빈도와 구간 차이를 분석해 환경 요인의 영향을 평가할 필요가 있다. 이는 자율주행 운행 안정성을 높이는 데 기여할 것이다.
도로 구간 특성이 ODD(Operational Design Domain)에 미치는 영향을 분석하여, 교차로 밀집 구간이나 차로 수 변화와 같은 요소가 제어권 전환에 미치는 영향을 평가하는 것도 필요하다.
마지막으로, I2V(인프라-차량 간 통신) 기술을 활용한 제어권 전환 알림 서비스가 개발될 경우, 본 연구에서 도출한 제어권 전환 다발구간 정보를 효과적으로 전달하는 방안과, 요인 간 상호작용이 제어권 전환 빈도에 미치는 영향을 검증하는 후속 연구가 요구된다.
