

서론
선행연구
1. 자율주행자동차의 모빌리티관련 연구
2. ADAS관련 연구
3. 시뮬레이션기법을 이용한 자율주행자동차관련 연구
ADAS를 이용한 자율주행자동차 모빌리티 서비스의 개발
1. 동적 교통정보의 수집방식
2. V2I 통신환경
3. 교통정보 데이터베이스의 관리
4. 동적 경로탐색 알고리즘
5. 성능강화 기능
ADAS를 이용한 자율주행자동차 모빌리티 서비스의 평가
1. 시뮬레이션기법을 이용한 자율주행자동차 모빌리티 서비스의 구현
2. 자율주행자동차 Mobility 서비스의 효과 분석
결론
서론
4차 산업혁명 시대 스마트 시티에서 구현될 수 있는 궁극의 모빌리티 수단은 자율주행자동차(AV)라고 할 수 있다. 정보통신기술(ICT)의 발전에 따라 차량이나 외부 인프라를 양방향 통신으로 연결하는 협력형 자율주행자동차에 대한 관심이 증가하고 있으며 무엇보다도 최근 들어 시민들의 운전편의에 대한 욕구가 크게 증가하여 자율주행자동차의 필요성 또한 증가하고 있는 실정이다(Jeong and Gang, 2017).
자율주행 기술 분야의 특성 상 신호체계, 도로 교통 인프라 등 지속적인 연구와 투자가 요구되며 정부에서는 자율주행자동차 상용화를 위해 2018년 약 1,652억을 투자하였고 투자규모는 연평균 57.3%의 성장률에 달한다(Park and Kim, 2019). 또한, 미국의 연방교통부는 자율주행자동차를 실생활에 도입하기 위한 파일럿 프로젝트에 10년간 약 5조 원을 투자하고 있어 국내외로 자율주행 분야가 미래에 중요한 산업으로 급부상하고 있는 상황이다(Cha, 2016).
도시부 도로에서 자율주행자동차의 운행은 차량에 장착되어 있는 카메라 및 레이더와 같은 첨단 운전자 보조 시스템(ADAS)을 통해 차량이나 보행자 및 주변 인프라를 인식하고 차량 스스로 제어하여 목적지까지 이용자를 안전하게 이동시킬 수 있어야 한다. 이와 더불어 협력 지능형교통체계(C-ITS)의 요소기술인 V2X와 같은 통신기술을 활용하여 주변차량 혹은 교통관제센터와 현재 교통상황이나 사고 위험 정보를 공유할 수 있어야지만 도로망 전체적인 안전과 이동성의 개선을 기대할 수 있다(Lee, 2016).
대부분의 자율주행자동차관련 연구들은 주변 사물에 대한 정확한 인식(Song and Lee, 2014; Lee et al., 2019b)과 인공지능(AI) 학습을 통해 인간의 개입이 최소가 되게 하는 안전한 주행에 집중하고 있다(Nastro, 2008; Kim et al., 2013). 이에 반해, 자율주행자동차를 이용한 동적 교통정보수집방식과 자율주행자동차의 모빌리티 서비스 즉 출발지에서 목적지까지의 최적 경로탐색의 구현방식에 대한 연구는 부족한 편이다.
따라서 본 연구는 자율주행자동차의 안전한 주행을 위해 기본적으로 설치되는 ADAS 장치의 시공간 정보를 이용하여 링크 통행시간과 같은 동적 교통정보를 수집하고, 차량과 노변기지국 간의 C-ITS 통신환경(V2I)에서 구현이 가능한 중앙집중식 자율주행자동차 모빌리티 서비스를 개발한다. 미시적 시뮬레이션 모델인 VISSIM을 이용하여 도시부 격자형 도로망에서 교통수요, 자율주행자동차의 점유율, 돌발상황의 발생 유무 등으로 구성된 시나리오의 분석을 통해 중앙집중식 자율주행자동차 모빌리티 서비스를 평가하고 시사점을 도출한다.
선행연구
1. 자율주행자동차의 모빌리티관련 연구
Wang et al.(2017)은 노변기지국을 통해 교차로로 진입하는 교통량으로 접근로의 사고를 파악하고 V2I 통신 방식을 적용하여 해당 경로를 주행하는 차량들에게 우회경로를 제공하는 연구를 수행하였다. 또한 Davis(2017)는 교통량을 이용하여 자율주행자동차의 기종점에 대한 최적의 경로를 탐색하고 평가하였다. 그 결과 교통량은 자율주행자동차의 모빌리티 서비스를 개선하기 위한 변수로 적합하지 않은 것으로 나타났다. Seo et al.(2020)은 다양한 파라미터와 교통상황을 반영하는 자율주행자동차의 최적 경로 탐색시스템을 제시하고 시뮬레이션기법을 통해 그 시스템이 운전자에게 미치는 영향을 분석하였다. Kim(2010)은 VISSIM을 통해 V2V 통신환경에서 구현되는 동적 첨단 운전자정보시스템(ATIS)을 개발하고 평가하였다. 이 시스템은 차량 간 통신, 차량 내 통행시간 데이터베이스, 동적 경로안내시스템(DRGS) 등 세 가지 핵심 모듈로 구성되었다. Bucsan et al.(2017)은 시뮬레이션 환경에서 중앙제어 자율주행 전기자동차의 성능모델과 결합된 지능형 경로탐색 알고리즘을 개발하였다. 통행시간을 링크의 통행비용으로 사용하였으며 시뮬레이션 결과로부터 얻은 비용함수 값을 기반으로 새로운 경로를 탐색하였다.
2. ADAS관련 연구
ADAS는 기본적으로 주변 상황을 인지하고 주변 차량과 형성되는 돌발상황 정보를 사전에 제공하여 운전자의 반응을 유도하거나 차량 스스로 대응함으로써 운전자의 안전을 확보하기 위한 시스템이다(Van der Heijden and Marchau, 2005). 교통안전에 대한 ADAS의 효과분석을 위하여 Jeon and Daimon(2009)은 교통상황의 위험 정도에 따라 충돌방지정보를 단계화시켜 운전자에게 제공한 후 운전행동에 미치는 영향을 분석 하였다. Jeong and Oh(2013)는 ADAS 차선이탈경고(LDWS)와 자동비상제동(AEBS) 기능의 교통사고 감소효과를 추정하였으며, Lee et al.(2019a)은 종방향 충돌상황에서 ADAS 자동비상제동(AEBS), 전방충돌경고(FCWS) 및 적응형 순향제어(ACC) 기능의 대응능력에 대하여 분석하였다.
이와 더불어 고정식 검지기의 공간적인 한계를 극복하기 위해 ADAS를 장착한 차량을 이용하는 새로운 교통류(교통량, 속도, 밀도) 추정방법이 최근 시도되고 있다. Seo and Kusakabe(2015)와 Seo et al.(2015)은 특정 시공간 검지영역에서 주행하는 ADAS 차량의 통행시간과 통행거리를 도출하고, ADAS 차량과 선행 차량 간의 차두거리를 시간축으로 연장한 면적의 관계를 통해 밀도를 추정하였다. 또한, Kim et al.(2019)은 실험도로에서 관측된 ADAS 카메라의 오차를 반영하여 ADAS 차량을 이용한 교통류 추정방법의 신뢰성을 시뮬레이션 기법을 통해 평가하였다.
3. 시뮬레이션기법을 이용한 자율주행자동차관련 연구
자율주행자동차관련 연구를 실제 도로에서 수행하는 것은 상당한 위험부담이 따른다. 따라서 자율주행자동차를 주제로 하는 다수의 연구자들은 NETSIM, AIMSUN, VISSIM 등과 같은 미시적 시뮬레이션 모델에 의존하는 경우가 많다. Seo et al.(2020)은 효과적이고 원활한 자율주행자동차의 운영을 위해서는 다양한 교통상황별 시뮬레이션 시나리오 분석 및 테스트베드 구축이 필요하다고 정의하였다. Yook et al.(2018)은 VISSIM을 통하여 주행관련 변수 중 자율주행과 사람의 주행을 차별화할 수 있는 주행 관련 변수를 선정하였다. Kang et al.(2019)은 미국 자동차공학회(SAE)에서 제시한 Level 4 수준의 자율주행관련 파라미터들을 VISSIM의 운전자 행태모형에 적용하여 분석하였다.
또한, Jeong et al.(2020)은 자율주행버스가 전용차로로 진입하기 위한 영향권의 길이를 제시하는 과정에서 시뮬레이션 기법을 이용하여 영향권의 안전성을 평가하였다. Wang and Wang(2017)은 VISSIM을 이용하여 한 차로에서 주행이 가능한 자율주행자동차의 주행 알고리즘을 개발하고 분석한 결과, 사람이 운전하는 것보다 도로의 용량이 개선되는 것을 보였다. Chai et al.(2017)은 좀 더 현실적인 자율주행자동차 연구를 위하여 도로망, 차량운영, 객체의 무작위성, 표출의 과정으로 구성된 다층시뮬레이션 플랫폼을 개발하고 시뮬레이션 결과와 이론적인 차량지체를 비교하여 그 신뢰성을 검증하였다. Li et al.(2019)은 VISSIM을 이용하여 자율주행자동차가 사람이 운전하는 차량에 지나치게 접근해서 주행한다거나 지나치게 근접해서 차선변경을 하는 등의 운전행태가 교통에 미치는 영향을 분석하였다.
ADAS를 이용한 자율주행자동차 모빌리티 서비스의 개발
본 연구는 자율주행자동차를 이용하여 도로망의 교통상황을 파악하고 이를 기반으로 자율주행자동차 모빌리티 서비스를 개발하고 있다. 이 서비스를 위해 구현되어야하는 기본적인 네 가지 모듈은 동적 교통정보의 수집방식, 교통정보의 송수신을 위한 V2I 통신환경, 교통정보 데이터베이스의 관리, 동적 경로탐색알고리즘으로 정의할 수 있다. 그리고 좀 더 현실적인 서비스의 구현과 효율을 개선하기 위한 추가 기능들까지 제시하고 있다.
1. 동적 교통정보의 수집방식
본 연구는 ADAS 장비를 장착한 자율주행자동차가 격자형의 도시부도로를 주행하는 과정에서 상류부 교차로에서 특정 링크를 진입하는 시점부터 하류부 교차로를 통과하여 또 다른 링크에 진입하는 시점까지를 해당 링크의 통행시간으로 정의한다. 링크의 통행시간은 하나의 링크를 대상으로 상류부와 하류부 교차로에서의 행해지는 회전(좌회전, 직진, 우회전)을 고려하여 아홉 가지로 산정할 수 있으며, 본 연구는 우회전 차량의 적색신호 우회전(RTOR)을 허용하지 않아 직진 신호시간동안 하류부 링크를 우회전으로 진입하는 시점을 우회전 차량의 통행시간으로 산정하고 있다.
2. V2I 통신환경
본 연구는 교통정보 수집 차량의 점유율과 차량의 통신반경에 따라 교통정보 공유의 공간적인 한계를 보이는 V2V 통신방식 대신 차량이 새로운 링크를 진입하는 이벤트가 발생할 때마다 실시간으로 링크 통행시간 정보를 교통관제센터로 전송하는 V2I 통신방식을 채택하고 있다. 이를 통해 도로망 전체의 동적 교통상황의 파악이 가능한 중앙집중식 자율주행자동차 모빌리티 서비스의 구축이 가능하다. 또한 V2I 통신방식을 통해 교통관제센터로부터 도로망 내 주행 중인 모든 자율주행자동차를 대상으로 목적까지 최적 경로정보를 빠짐없이 전송할 수 있어 체계최적(system optimum) 교통운영이 가능한 시스템이라고 할 수 있다. 단, 본 연구는 V2I 통신을 담당하는 노변기지국이 모든 교차로에 설치되어 있고 통신반경에 대한 제약이 없는 것으로 설정하였다.
3. 교통정보 데이터베이스의 관리
자율주행자동차의 주행을 통해 수집되는 링크별 통행시간은 V2I 통신방식을 통해 실시간으로 교통관제센터로 전송되어 시공간 데이터베이스에 저장된다. 동일한 링크에서 상류부와 하류부 교차로에서의 회전 유형에 따라 상이한 통행시간 정보도 차별적으로 수용할 수 있도록 데이터베이스가 설계되어야 한다.
전체 도로망의 실시간 교통상황의 파악을 위해서는 최신 정보가 시공간 데이터베이스에 충분히 수집되어야하지만 링크 통행시간을 수집하는 자율주행자동차의 점유율이 충분하지 않을 경우 도로망을 구성하는 모든 링크의 통행시간을 확보할 수 없는 문제가 발생한다. 따라서 해당 도로망을 장시간 주행하여 이력통행시간 데이터베이스를 사전에 구축한 후, 자율주행자동차가 주행하지 않은 링크의 통행시간 정보를 이 이력정보로 대체할 수 있어야 한다. 교통관제센터의 통행시간 데이터베이스는 수집된 링크별 통행시간을 일정한 갱신주기마다 취합하여 해당 링크의 통행시간으로 정의하고 동적 경로탐색알고리즘의 입력 값으로 활용한다.
4. 동적 경로탐색 알고리즘
교통관제센터 시공간 데이터베이스에 축적된 링크 통행시간 정보를 이용하여 개별 자율주행자동차들의 현재 위치에서 목적지까지의 동적 최적 경로를 탐색한다. 경로탐색 후 V2I 통식방식으로 경로정보를 전달하기 위해서는 차량들의 기종점(OD) 정보가 사전에 교통관제센터와 공유되어야 한다. 또한 격자형 도시부도로를 고려하여 모든 차량들의 기종점(OD) 경로는 정적 교통정보인 거리를 기준으로 최단거리 경로로 정의하며 최적의 경로를 탐색하더라도 기종점(OD) 경로를 구성하는 링크의 수는 동일하도록 설정하였다. 단, 자율주행자동차는 도로망에 진입한 시점을 기준으로 원하는 시점에 최적의 경로를 제공받아야 하지만 본 연구에서 개발하는 중앙집중식 자율주행자동차 모빌리티 서비스는 전체 도로망에 대한 정기적인 갱신주기마다 최적 경로를 탐색하고 V2I 통신방식을 통해 자율주행자동차들에게 경로 정보를 전달하는 방식으로 운영된다.
5. 성능강화 기능
본 연구는 보다 현실적이고 효과적인 중앙집중식 자율주행자동차 모빌리티 서비스의 개발을 위하여 세 가지 성능강화기능을 구현하고 있다. 첫째는 목적지에 가까이 위치한 차량들을 대상으로 불필요한 경로변경 최소화, 둘째는 최적 경로가 기존 경로보다 일정 비율 이상으로 통행시간을 단축하면 경로 우회, 그리고 셋째는 교통사고와 같은 돌발상황의 신속한 파악이다.
격자형의 도시부도로에서 목적지까지 일정 거리 내에서의 경로 변경은 통행시간의 단축효과가 미미할 것으로 판단되며 또한 최적 경로가 기존 경로의 통행시간보다 일정 비율 이상의 통행시간을 단축시키지 못 하는 경우도 경로를 변경할 이유가 없다. 특히, 현 지점에서 목적지까지 현재 교통상황을 근거로 경로를 탐색한 결과이므로 목적지를 도착할 시점에 기존 경로와의 통행시간 차이는 확신할 수가 없다. 기존의 연구에 의하면 20% 이상의 통행시간 차이에서 경로를 변경하는 경향이 강한 것으로 나타났다(Mahmassani and Jayakrishnan, 1991). 마지막으로 돌발상황이 발생한 경로로 주행해야 하는 차량들에게 새로운 경로를 제공하지 못 한다면 다수의 차량들이 불필요한 정체를 경험하게 된다. 따라서 서비스의 효율을 개선하기 위해서는 최대한 신속하게 교통상황의 파악이 가능해야한다.
ADAS를 이용한 자율주행자동차 모빌리티 서비스의 평가
1. 시뮬레이션기법을 이용한 자율주행자동차 모빌리티 서비스의 구현
본 연구는 미시적 시뮬레이션 모델인 VISSIM과 VISSIM COM을 활용하여 자율주행자동차의 주행환경을 구현하고 중앙집중식 자율주행자동차 모빌리티 서비스의 효과를 평가하고 있다.
1) 시뮬레이션 구현 방식
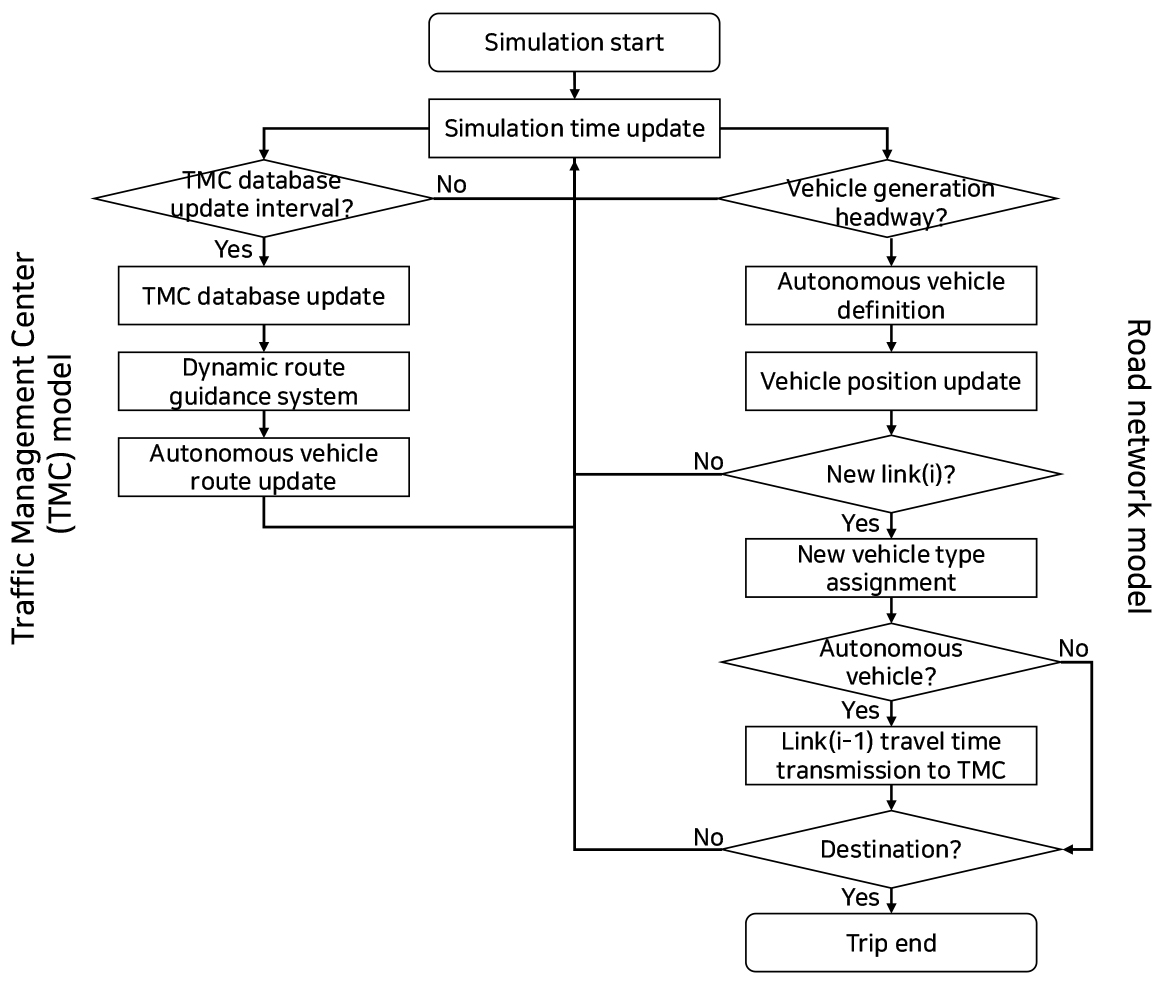
본 연구에서 개발한 중앙집중식 자율주행자동차 모빌리티 서비스의 시뮬레이션 모델은 Figure 1에서와 같이 크게 도로망 모델과 교통관제센터 모델로 정의할 수 있다. 도로망 모델은 차량을 발생시켜 자율주행자동차와 일반차량으로 정의하고 자율주행자동차를 대상으로 새로운 링크를 진입할 때마다 상류부 링크의 통행시간을 교통관제센터로 전송하는 기능을 한다. 반면, 교통관제센터 모델은 도로망 모델에서 전송되는 통행시간 정보를 시공간 데이터베이스에 저장하고 데이터베이스의 갱신주기마다 개별차량별 최적 경로를 탐색한다. 서비스 성능강화 기능들의 조건을 만족하는 차량들을 대상으로 최적 경로 정보를 전송하는 과정을 담당한다.
2) 동적 경로탐색 시스템
본 연구는 교통관제센터의 시공간 데이터베이스 갱신주기마다 집계되는 링크별 통행시간을 입력받아 다익스트라 알고리즘을 이용하여 최적 경로를 탐색한다. 모든 차량들은 사전에 기종점(OD)과 주행경로가 배정되어 있으며 데이터베이스 갱신주기마다 현재 위치에서 기존의 경로와 최적 경로의 통행시간을 비교하여 서비스 성능강화 기능의 첫 번째와 두 번째를 만족하는 자율주행자동차들만 경로를 우회하도록 한다.
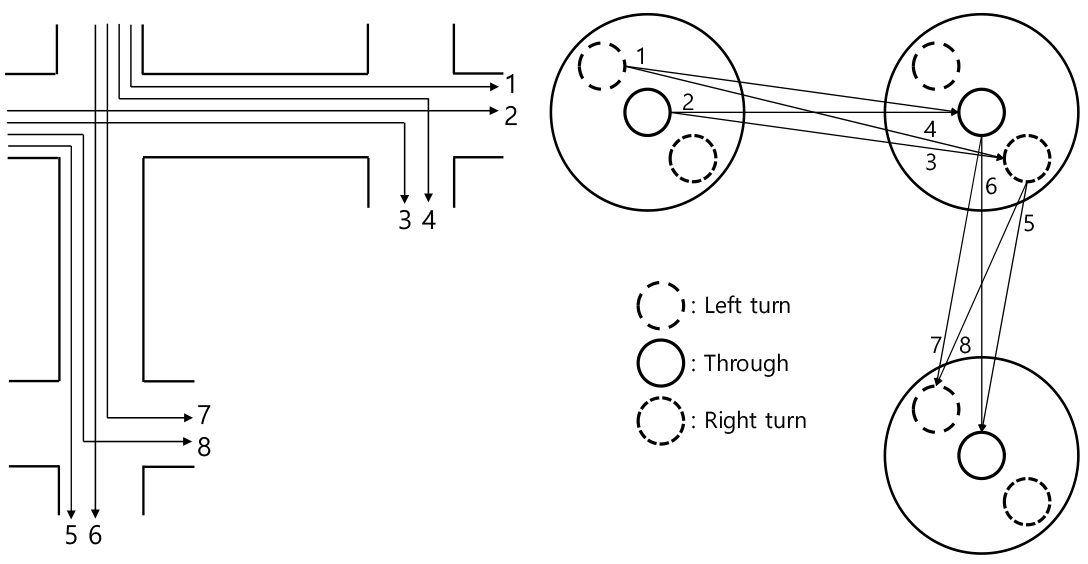
Figure 2는 다익스트라 알고리즘을 구동하기 위해 격자형 도시부도로를 방향 그래프(directed graph)로 변형하는 과정이며 효율적인 경로 탐색을 위하여 모든 차량들의 기종점(OD) 경로를 네 가지 방향 그래프로 정의하였다.
3) 경로전환 구현 과정
기존 VISSIM 모델은 개별 교차로에서 정의된 회전비율과 난수를 반영하여 차량회전을 제어하지만 본 연구는 개별 차량에 대해서 사전에 기종점(OD)과 경로를 정의한 후 VISSIM COM을 이용하여 Figure 3과 같은 방식으로 차량 회전을 제어하였다. 다시 말해, 새로운 링크에 차량이 진입할 때 사전에 정의된 차량유형(vehicle type)을 할당(①)한다. 차량유형(vehicle type)은 회전 방식에 따라 특정한 값을 가진다. 하류부 교차로에서 차량회전을 결정하는 세 개의 경로결정지점(route decision point)을 동일한 위치에 정의(②)한다. 개별 경로결정지점(route decision point)은 특정 차량유형(vehicle type)에만 작용하도록 설정한다. 따라서 개별 차량이 경로결정지점(route decision point)을 통과할 때, 할당된 차량유형(vehicle type)에 따라 하류부 교차로에서 지정된 방향으로 회전(③)하게 된다. 이와 같은 과정을 거쳐 모든 차량들이 목적지까지 정의된 경로를 통해 주행하게 된다. 최적 경로알고리즘에 의해 도출된 경로가 기존 경로와 다를 경우 목적지까지의 경로에 대한 링크별 차량유형(vehicle type)을 갱신하고 새로운 경로를 통해서 Figure 3과 같은 방식으로 목적지까지 주행하게 된다.

2. 자율주행자동차 Mobility 서비스의 효과 분석
1) 시뮬레이션 파라미터
본 연구에서 고려하는 시뮬레이션 파라미터들은 Table 1에 제시되고 있다. 대상 도로망은 7×7 격자형 신호교차로로 구성(i.e., 4.5km×4.5km)되어 있으며 접근로마다 직진차로는 2차로 500m 그리고 좌회전차로는 1차로 150m이다. 신호는 120초 고정 주기로 직진 37초와 좌회전 17초로 모든 교차로에서 같은 현시로 운영된다. 교통량은 28개의 차량 진입 링크를 통해 300vph(전체 8,700대)와 600vph(전체 17,400대)를 발생시키고 차량의 속도는 50kph로 정의하였다. 차량의 기본 회전 비율은 좌회전 15%, 직진 70%. 그리고 우회전 15%로 설정하였다.
Table 1.
Simulation parameters of autonomous vehicle mobility service
본 연구는 교통사고와 같은 돌발상황의 발생 유무에 따른 중앙집중식 자율주행자동차 모빌리티 서비스의 효과를 평가하기 위하여 비사고 모형과 사고 모형으로 구분하여 분석하였다. 사고 모형의 경우 도로망의 중앙에 위치한 특정 링크에 시뮬레이션 시간 1,200초와 2,400초 동안 교통사고를 발생시켜 해당 링크의 두 차로를 전면통제하였다. 자율주행자동차는 전체 차량의 10%에서 최대 50%까지 10% 단위로 정의하였다. 비사고 모형과 사고 모형에서 시스템 갱신 주기인 3분마다 자율주행자동차의 현 지점에서 목적지까지의 최적 경로를 다익스트라 알고리즘으로 탐색한 후, 본 연구에서 정의한 시스템 성능강화 기능들을 만족하는 자율주행자동차들에 대해서 경로를 우회하도록 하였다.
2) 통행시간 단축효과
시뮬레이션 구동 후 도로망에 차량들을 충분히 위치시키기 위해 시뮬레이션 시간 1,000초까지 도로망을 빠져나간 차량들은 분석에서 제외시켰다. 본 연구는 중앙집중식 자율주행자동차 모빌리티 서비스가 제공되지 않는 기본 모형과 해당 서비스가 제공되는 비사고와 사고 모형을 대상으로 모형들 간에 경로 통행시간을 비교할 수 있는 차량들을 대상으로 통행시간 단축효과를 분석하였다. 다시 말해, 기본 모형은 경로변경을 하지 못 하며 비사고와 사고 모형은 경로변경이 가능하여 중앙집중식 자율주행자동차 모빌리티 서비스를 통행시간 단축의 관점에서 평가하고 있다.
Figure 4는 사고의 유무와 교통량에 따른 경로 변경 자율주행자동차들의 전체 단축 통행시간(Figure 4 left)과 차량별 평균 단축 통행시간(Figure 4 right)을 나타낸다. 전체 단축 통행시간에서 자율주행자동차의 경로변경으로 인해 비사고 모형보다 사고 모형에서 더 큰 통행시간을 단축시켰으며 그 정도는 교통량이 큰 600vph에서 훨씬 크게 나타났다. 또한, 자율주행자동차의 점유율이 커질수록 사고경로를 우회할 수 있는 차량들이 늘어나 더 큰 통행시간이 단축되는 것을 알 수 있다.
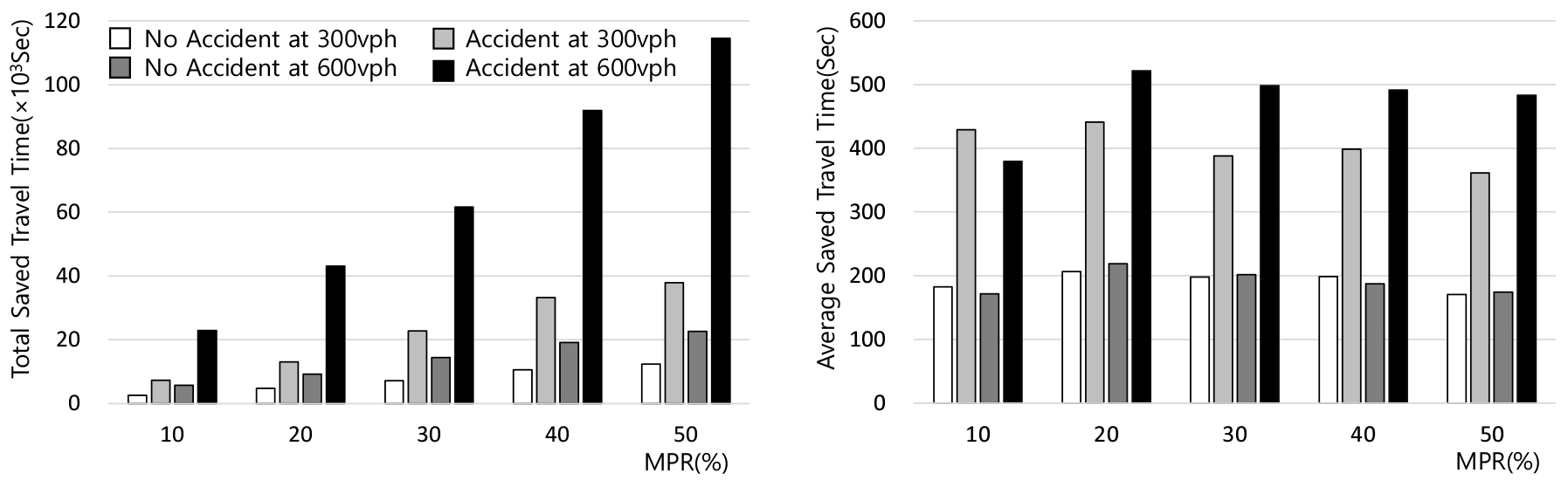
차량별 평균 단축 통행시간은 비사고 모형보다 사고 모형에서 두 배 이상의 수준으로 크게 나타나고 있다. 비사고 모형에서는 교통량이나 자율주행자동차의 점유율에 관계없이 거의 유사한 단축 통행시간을 나타내는 반면, 사고 모형 600vph의 경우 사고경로를 위회하는 자율주행자동차가 상대적으로 많아져 차량별 통행시간이 300vph보다 평균적으로 더 크게 단축되는 것으로 나타났다. 단, 자율주행자동차가 600vph의 10% 수준에서 경로를 우회하는 경우, 사고로 인한 경로변경뿐만 아니라 일상적인 경로변경까지 다수 포함되어 300vph의 10% 수준보다 상대적으로 통행시간이 적게 단축되는 것으로 나타났다.
3) 차량별 통행시간 단축효과
Figure 5와 Figure 6은 600vph 비사고와 사고 모형에서 자율주행자동차의 점유율에 따른 차량별 단축 통행시간을 나타내고 있다. 비사고 모형에서도 시스템 효율강화 기능들을 만족하는 자율주행자동차들은 경로를 변경하여 통행시간을 단축시킬 수 있지만 교통사고 경로를 우회하는 수준의 통행시간 단축은 나타나지 않는다. 그리고 자율주행자동차의 점유율이 커질수록 경로를 우회하는 차량들이 늘어남에 따라 전체 단축 통행시간은 커지지만 평균 단축 통행시간은 크게 차이를 보이지 않는다. 300vph의 결과도 이와 유사한 것으로 나타났다.
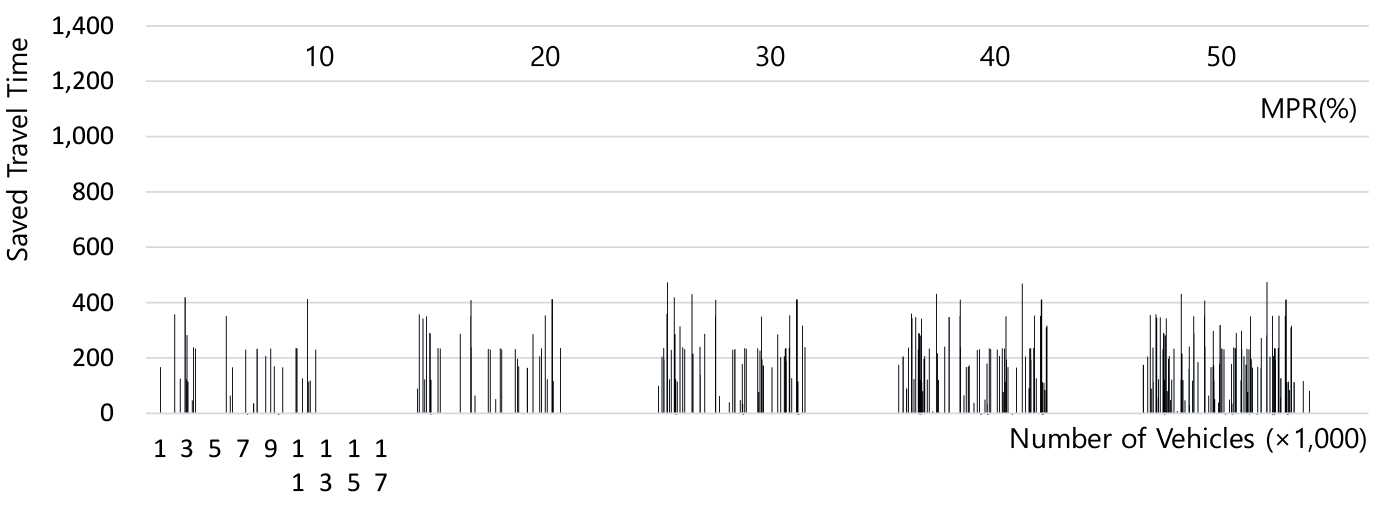
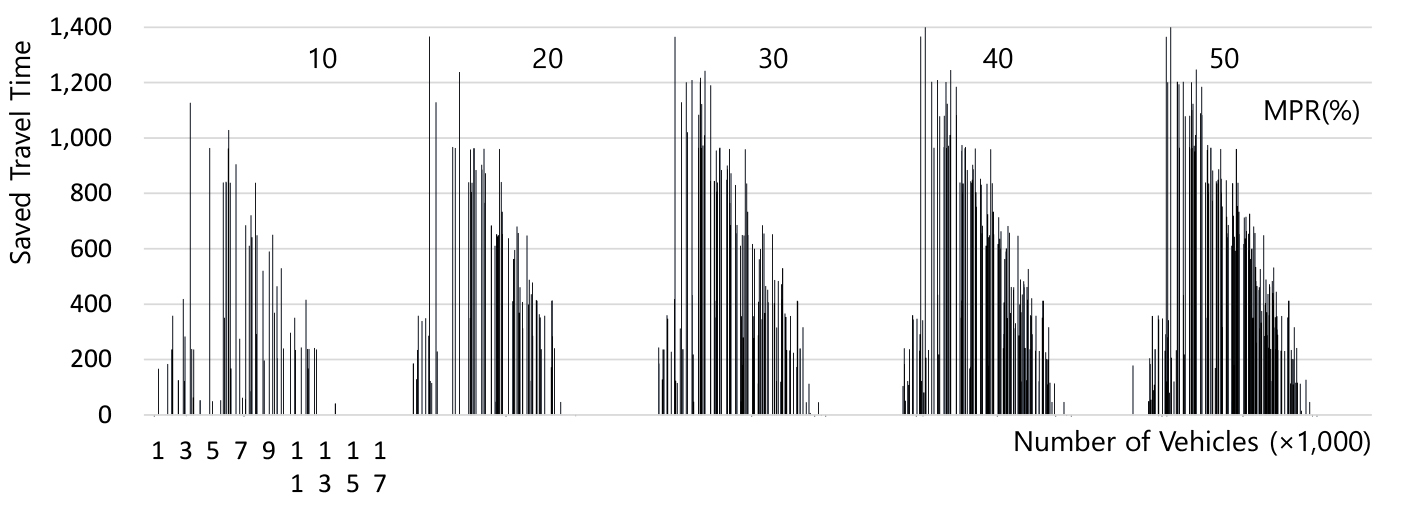
Figure 6 600vph 사고 모형에서 자율주행자동차의 점유율에 관계없이 차량번호가 커질수록 단축 통행시간이 줄어드는 것은 시뮬레이션 시간 1,200초에 사고가 발생하고 2,400초에 해소되면서 사고발생 초기와 해소 시점에 사고경로를 우회하는 차량들 간에 단축되는 통행시간이 상이하기 때문이다. 다시 말해, 교통사고 상황을 최대한 빠르게 파악하고 자율주행자동차의 경로를 안내하는 것이 중앙집중식 자율주행자동차 모빌리티 서비스의 효율성을 높일 수 있는 방법이라고 할 수 있다.
결론
스마트 시대의 궁극적인 모빌리티 수단은 자율주행자동차라고 할 수 있다. 자율주행자동차와 관련한 연구는 주로 사물에 대한 정확한 인식이나 인공지능(AI) 학습을 통해 인간이 운전에 개입하지 않는 상황에서 안전하게 주행하는 것을 목표로 하고 있다. 이에 반해 자율주행자동차를 이용하여 교통상황정보를 동적으로 수집하고 이를 기반으로 자율주행자동차의 최적의 경로를 탐색하고 제공하는 모빌리티 서비스에 관한 연구는 부족한 편이다.
본 연구는 자율주행자동차에 기본적으로 탑재되는 ADAS 장비의 시공간 데이터를 통해 교통상황 정보를 동적으로 수집하고 C-ITS 환경(V2I)에서 수집된 정보를 교통관제센터로 전송하는 중앙집중식 자율주행자동차 모빌리티 서비스를 개발하였다. 이 시스템은 동적 교통정보의 수집, V2I 통신환경, 교통정보 데이터베이스 관리, 그리고 동적 경로탐색알고리즘으로 크게 네 가지 모듈로 구성되어 있고 시스템의 효율을 개선하기 위해 세 가지 추가 기능을 포함하여 운영된다.
본 연구는 VISSIM에서 7×7 격자형 신호교차로 도로망에 300vph(전체 8,700대)와 600vph(전체 17,400대)의 차량을 발생시키고, 중앙집중식 자율주행자동차 모빌리티 서비스의 효과를 평가하기 위해 비사고와 사고 모형으로 구분하여 분석하였다. 비사고 모형과 사고 모형에서 시스템 갱신 주기인 3분마다 자율주행자동차의 현 지점에서 목적지까지의 최적 경로를 다익스트라 알고리즘으로 탐색한 후, 본 연구에서 정의한 시스템 성능강화 기능들을 만족하는 자율주행자동차들에 대해서 경로를 우회하도록 하였다.
자율주행자동차의 경로변경으로 인해 발생하는 전체 단축 통행시간은 비사고 모형보다 사고 모형에서 더 크게 나타났으며 그 정도는 교통량이 큰 600vph에서 훨씬 크게 나타났다. 또한, 자율주행자동차의 점유율이 커질수록 사고경로를 우회하는 차량들이 늘어나 더 큰 통행시간이 단축되는 것을 알 수 있다.
자율주행자동차별 평균 단축 통행시간은 비사고 모형보다 사고 모형에서 두 배 이상의 수준으로 크게 나타나고 있다. 비사고 모형에서는 교통량이나 자율주행자동차의 점유율에 관계없이 거의 유사한 평균 단축 통행시간을 나타내는 반면, 사고 모형에서는 600vph의 경우 사고경로를 위회하는 자율주행자동차가 상대적으로 많아져 차량별 통행시간이 300vph보다 평균적으로 더 크게 단축되는 것으로 나타났다.
또한 사고발생 초기와 해소 시점에 사고경로를 우회하는 차량들 간에 단축되는 통행시간이 상이하기 때문에 자율주행자동차의 점유율에 관계없이 차량번호가 커질수록 단축 통행시간이 줄어드는 것을 알 수 있다. 따라서 교통사고 상황을 최대한 신속하게 파악해야지만 중앙집중식 자율주행자동차 모빌리티 서비스의 효율을 극대화할 수 있는 것으로 나타났다.
본 연구는 특별한 장치의 추가 없이 ADAS와 같이 자율주행자동차의 운행에 필요한 기본적인 장비만으로 동적 교통상황 정보의 수집(data provider)이 가능하며 이를 이용한 중앙집중식 첨단 운전자정보시스템의 개발과 자율주행자동차의 모빌리티 서비스(data consumer)로의 활용가능성을 보였다.
향후 연구로는 자율주행자동차를 위한 중앙집중식 자율주행자동차 모빌리티 서비스와 더불어 V2V C-ITS 환경에서 구현이 가능한 분산식 자율주행자동차 모빌리티 서비스의 개발과 평가가 필요하다고 할 수 있다. 또한 본 연구는 노변기지국의 통신반경에 대한 고려가 부족하지만 향후 연구에서는 V2V나 V2I C-ITS 구현을 위한 실질적인 통신반경을 반영할 필요가 있다.
