

서론
선행연구 검토
1. 자율주행 대중교통 모빌리티와 전기차
2. 빅데이터 및 교통계획 측면에서의 전기차 효율 향상 연구
3. DEM(Digital Elevation Model)을 사용한 연구
4. 시사점
방법론
1. DEM을 이용한 경사도 산정
2. Electric Vehicle(EV) 에너지 소비 모델
3. 경사 가중치 계수의 적용
4. 최단거리 경로 탐색 알고리즘
결과
1. DEM 기반의 경사 속성 부여
2. 경사도 기반의 알고리즘 평가
결론
서론
2050 탄소 중립을 달성하기 위해 친환경 교통수단 도입의 필요성이 증가하고 있다. 탄소배출에서 교통부문은 큰 비중을 차지하고 있다. 서울시는 전체 탄소배출의 약 19.2%가 교통부문에서 발생하고 있으며, 이 문제를 해결하기 위해 다양한 친환경 교통수요관리 정책을 시행, 계획하고 있다(Bencekri et al., 2021). 구체적으로 서울시는 2025년부터 산하기관을 통해 전기차를 의무적으로 구매할 예정이며, 2040년까지 모든 택시를 전기차로 대체, 2050년부터는 현재 시행 중인 한양도성 내 5등급 차량 제한을 서울시 전체의 내연기관차 운행 제한으로 확대하고자 한다(Oh, 2021).
친환경 교통정책 측면에서 전기차 도입과 자율주행 대중교통 모빌리티는 밀접한 관련이 있다. 우선, 자율주행 기술은 레이다를 비롯한 다양한 장비 부착이 필요하여 많은 공간이 필요한데, 전기차는 내연기관차 대비 부품 수가 40-50% 수준이므로 자율주행차량의 제어, 내부공간 활용, 데이터 분석 등에 효과적이다(Jeong et al., 2018). 두 번째로, 군집주행과 같은 자율주행의 부가적인 효과 또한 탄소저감효과가 있다(Yoon and Hong, 2021). 세 번째로, 심각한 운영적자인 대중교통 서비스에 자율주행을 도입하여 인건비 등의 비용감소와 대중교통 활성화를 통한 교통수요관리가 가능하다(Yoon, 2020). 이러한 효과를 바탕으로 전기차와 자율주행 기술을 접목한 수요응답형 교통체계(DRT), 자율주행 로보택시(Robo Taxi) 등의 친환경 교통서비스를 통해 탄소배출을 줄이는 계획이 추진되고 있다(Cha, 2020).
전기차는 내연차와 다르게 구동 시작점부터 최대토크를 발휘하여 평지에서 우월한 가속 능력을 보여주고 있다. 하지만 전기차는 내연기관 대비 장시간의 충전 시간이 필요하며, 충전 인프라도 부족한 이유로 인해 경쟁력을 확보하지 못하고 있다(Dündar et al., 2022). 추가로 난방, 경사등판 등과 같은 차량의 내적, 외적 요인들에 의해 배터리의 효율이 떨어지게 된다. 이러한 상황에서 다양한 제어에 추가적인 소요 전력이 필요한 자율주행 기술이 도입되면 경쟁력을 더욱 떨어뜨릴 수 있다(Kim et al., 2022a). 실제로 우리의 법적 도로 최대 경사도는 약 17% 수준이지만, 1999년 관련법이 제정되기 이전에 만들어진 도로의 경우 경사도 17%를 넘는 경우가 많으며, 특히 자율주행 대중교통 서비스가 우선적으로 제공되어야 하는 last mile 지역인 주택가 주변 이면도로의 경사도에 대한 정보를 전혀 알 수 없는 상황에서 전기차 기반의 자율주행 대중교통 서비스가 제공된다면 운행효율 측면이나 안전성 측면에서 상당히 취약한 운행이 될 수밖에 없는 실정이다.
현재 내연기관은 점점 전기차로 대체되고 있으며 일반 승용차뿐만 아니라 대중교통 등 사회 곳곳에 전기 플랫폼이 활성화되고 있다. 이러한 플랫폼이 늘어남과 함께 에너지 효율성을 올릴 수 있는 알고리즘의 필요성이 대두되고 있다. 향후 전기차, 자율주행 미래를 아우를 수 있는 알고리즘의 개발을 위한 연구가 지속적으로 필요하다. 앞서 전기차 에너지 효율성을 활성화하기 위해 Pusztai et al.(2022)는 Genetic 알고리즘의 응용을 통해 에너지 소비를 줄이는 연구를 진행하였다. 앞으로도 전기차, 자율주행 등의 미래기술의 최적 에너지효율을 찾기 위한 알고리즘 개발 연구는 계속되어야 한다.
선행연구에서는 오픈된 고도 데이터를 활용하여, 경사까지 고려한 네트워크 생성을 통해 특정 경로에서의 전기차의 효율성을 확인하고자 하였다(Yoo et al., 2020; Ku et al., 2021). 여기에, 본 연구는 고도 데이터에 대한 추가 검증과 전체 네트워크까지 고려한 비교검증을 추가한 연구를 수행하려고 한다. 본 연구는 교통계획 측면에서 이러한 전기차 기반 자율주행 모빌리티의 한계를 개선하기 위해 경사로에서의 전기차 효율을 고려하여 자율주행 대중교통 모빌리티 경로를 산정하였다. 구체적으로 Digital elevation model(DEM)을 이용하여 위성사진의 음영을 바탕으로 현재 네트워크 속성에 없는 경사 속성을 부여하였다. 다음으로 경사에 따른 전기차 효율 실제값을 고려한 Generalized cost function(GCF)을 개발하였다. 이 연구는 네트워크에 경사 속성을 부여하는 데이터 융합과 특정 특성을 고려한 경로 산정 알고리즘을 개발한다는 점에서 의의가 있다. 마지막으로 본 연구가 전기차의 활성화를 통한 자율주행 대중교통 모빌리티 도입에 이바지하기를 기대한다.
선행연구 검토
본 연구는 연구의 목적에 따라 자율주행 대중교통 모빌리티와 전기차와의 관계, 빅데이터 및 교통계획 측면에서 전기차 효율 향상을 위한 연구를 검토하여 시사점을 도출하고자 한다.
1. 자율주행 대중교통 모빌리티와 전기차
자율주행 대중교통 모빌리티의 도입은 탄소배출 저감, 교통약자의 이동권 보장, 대중교통 사각지대 해소 등에 효과적이다(Kim, 2019). 대중교통 운영 관점에서 자율주행이 도입된다면 차량 구매비, 보조 인프라 구축 등 초기 비용이 많이 발생하지만, 인건비, 유류비, 사고감소로 인한 보험료 인하 등 운영비를 감소시킬 수 있고, 사고감소, 탄소배출 감소 등의 편익을 증대시켜 경제적 타당성이 있을 것으로 판단된다(Quarles et al., 2020). 자율주행 대중교통 차량의 소형화가 이루어지면 대중교통이 취약한 출·도착지의 접근성을 단축할 수 있다(Bhin et al., 2020). Fagnant et al.(2014)은 자율주행차량 도입을 통한 가·감속의 자동화 효과로 연료비의 효율성 증대를 제시하였으며, Choi(2022)는 전기차 기반의 자율주행 대중교통이 생산부터 폐차까지 내연차 대비 약 40% 수준의 소량의 탄소를 배출할 것으로 예측하였다. Jeong(2018)은 소음감소, 제어성 향상, 내부공간 활용, 적은 진동, 고장진단과 데이터 분석에 유리함을 가진다고 제시하였고 Yang and Lee(2022)는 소음감소에 이점이 있다고 주장하였다. 또한 자율주행차량의 무선 충전이 가능해지면 사용자는 이제는 주유나 충전기에 신경 쓸 필요가 없으며 차량이 스스로 충전하고 움직일 수 있게 되어 사용성을 크게 높일 수 있다(Hao et al., 2022). 이를 통해 자율주행 전기차가 도입되었을 때의 네트워크 구축, 통행 경로 배정, 모빌리티 허브 구축 등의 자율주행 대중교통 모빌리티 도입 증진을 위한 연구가 중요해질 예정이다(Ku et al., 2022). 다만, 자율주행 대중교통(DTO, Driverless Transit Operation) 도입을 위해 전기차 기반의 10인승 내외로 운영되는 Omiho 등이 자율주행 시범지구에 운영되고 있지만, 일부 경사로 등판능력이 없는 문제로 대부분 평지를 한정영역(ODD, Operational Design Domain)으로 설정하고 있다 (Kim et al., 2022b). 본 연구는 향후 전기차 자율주행 대중교통 서비스가 등판능력을 갖춘 상황을 가정하여 수행하고자 한다.
2. 빅데이터 및 교통계획 측면에서의 전기차 효율 향상 연구
전기차는 교통배출량과 에너지 소비를 줄이는 데 효과적이다(Ramli et al., 2020). 하지만 내연차에 비해 장거리 운행에 어려움이 있다(Ko et al., 2020). 전기차의 효율을 증가시키는 방법은 ‘배터리 용량’ 개선과 ‘배터리 효율’ 개선으로 구분된다. 전기차의 보급 초급에는 1회 충전시 200km의 짧은 주행거리를 가지고 있었지만, 구동 배터리 용량이 증가함에 따라 500km 이상 증가하며(Rho and Noh, 2022) 내연차의 1회 충전 주행거리 700-800km에 가까워지고 있다(Kim et al., 2020). 배터리 효율은 직접적인 구동장치의 개선과 간접적인 서비스의 개선이 있다. 직접적인 구동장치에서는 전방 예측형 파워트레인 제어기술과 같이 전동화와 지능화를 통해 배터리 소모 에너지를 최소화하는 연구를 진행하고 있다(Jeon, 2022). 간접적으로는 배터리 효율의 주변 환경으로 인한 영향 최소화가 있다. Rahman et al.(2022)은 전기차 주변의 온도가 배터리 소모량에 영향을 미치는 것을 확인하였다. Liu et al.(2017)는 연료 소비율에 공격적인 운전과 경사가 영향을 주는 것을 확인하고 경사에서의 소비예측을 개선하고자 하였다. 비슷하게 Choi et al.(2022)는 Personal Mobility(PM) 전용도로를 건설하여 전기에너지의 효율성을 높이고자 하였다.
다음으로 장거리 운행을 가능하게 하기 위한 보조적인 서비스 개선이다. 본 연구에서는 보조적인 서비스 개선에 대해 경사를 고려한 알고리즘 개발을 검토하였다. Lam et al.(2022)는 개미군집 알고리즘을 기반으로 교통 네트워크와 충전소를 고려한 전기차의 최적경로 알고리즘을 개발하였다. Kim et al.(2022c)는 머신러닝 기반의 교통 네트워크와 교통소통 정보, 배터리 효율을 고려한 주행가능거리를 예측하였다. Dündar et al.(2022)는 도로의 경사각이 급해질수록 전기차의 소비전력이 증가함을 확인하였다. 현재 개발되는 수요응답형 버스는 대중교통 취약 지역인 산지와 농촌에 우선 도입될 예정이며 특히 우리나라는 72% 이상이 산지로 이루어져 있어 전기차 기반의 수요응답형 버스 도입에 치명적이다(Ko et al., 2020). 즉, 전기차의 효율적인 장거리 운행을 위해 경사도의 정보가 필요함을 확인할 수 있다.
자율주행을 위해 주행이 이루어지는 환경에서는 동적지도(Local dynamic map; LDM)의 중요성이 주목받고 있다. 민간회사는 동적지도 개발을 위해 실시간 검지보다 판단이 빠른 레이어를 사용하여 고화질(High-definition; HD) 맵과 Advanced driver assistance systems(ADAS) 맵 구축에 힘쓰고 있다. 현재 도로의 공간정보는 한국교통연구원의 KTDB, 도로교통공단 TAAS, 한국시설안전공단DB를 통하여 운영관리하고 있다. 그 중 도로설계 및 예측을 수행하는 KTDB의 도로교통분석 시 도로의 경사도는 고려되지 않고 있다.
3. DEM(Digital Elevation Model)을 사용한 연구
사진 측량, 간섭 측정, 지상 레이저 및 기타 기술을 사용하여 구축되는 디지털표고모델(DEM)은 지형을 나타내는 고도 데이터로 지구과학 및 수문 응용에 중요하게 사용되고 있다. 교통 분야에서는 도로의 경사도가 연료 소비모델이 정확한 추정치를 결정하기 어렵기 때문에 간과되는 경향이 있다(Zhou et al., 2016; Wang et al., 2015). 이를 개선하고자 Magrath(2017)는 첨단버스운송시스템에 적합한 도로를 결정하기 위해서 DEM을 사용하여 대규모 도로 경사 자료를 수집하였다. Ziemke et al.(2017)는 DEM을 통해 경사를 판별하고 경사뿐만 아니라 통행시간, 시설, 도로 포장상태를 고려하여 자전거 최적화 도로를 선정하였다. Jeon and Kwon(2019)은 한국의 도로 공간 데이터를 한국교통연구원, 국토정보공사, 교통안전공단에서 분산되어 각기 서로 다른 방식으로 수집하는 방법의 불편성과 활용의 어려움을 설명하며 DEM을 포함한 공간정보를 통합하고자 하였다. Han et al.(2021)은 서울시 경사도는 DEM 정보를 1m 단위로 설정하여 산출하였지만, 해발고도를 사용하여 DEM으로 계산하였을 경우, 터널과 교량 등 입체적 도로의 종단경사를 고려하지 못하는 단점을 확인하여 개별 경사도를 산출하는 기술적인 방법의 필요성을 제시하였다.
4. 시사점
선행연구 검토 결과, 전기차의 효율증가는 대부분 전기차로 운영될 예정인 신교통수단을 활성화할 수 있음을 확인했다. 또한, 전기차는 배터리 효율 측면에서 아직 미완성이며, 이런 상황에서 전기차의 경사 등판능력을 고려한 경로 산정 연구의 시기 적절성을 확인하였다. 이를 통해 전기차의 경사효율을 고려한 통행 경로 알고리즘을 개발하는 본 연구가 산지 비중이 높은 한국형 지형에 전기차 기반의 수요응답형 대중교통 서비스를 도입하는데 경로 선택의 효율 측면, 사고감소 측면에서 효과적인 것을 확인하였다. 그러나 현재 경로 산정 연구에 활용할 수 있는 대표적인 KTDB 네트워크 자료는 경사 속성이 없으므로 본 연구와 같이 경사를 고려한 경로 알고리즘을 개발하기 위해선 경사 속성을 부여해야 한다. 따라서 본 연구는 DEM을 활용하여 위성사진 기반의 경사 속성을 생성, 기존의 KTDB 네트워크 자료와 융합하여 경사 속성이 부여된 네트워크를 먼저 개발하고, 다음으로 부여된 경사 속성과 전기차의 경사에 따른 효율이 본 연구의 경로 산정 알고리즘에 핵심 요소로 반영하는 점에서 연구의 차별점이 있다.
방법론
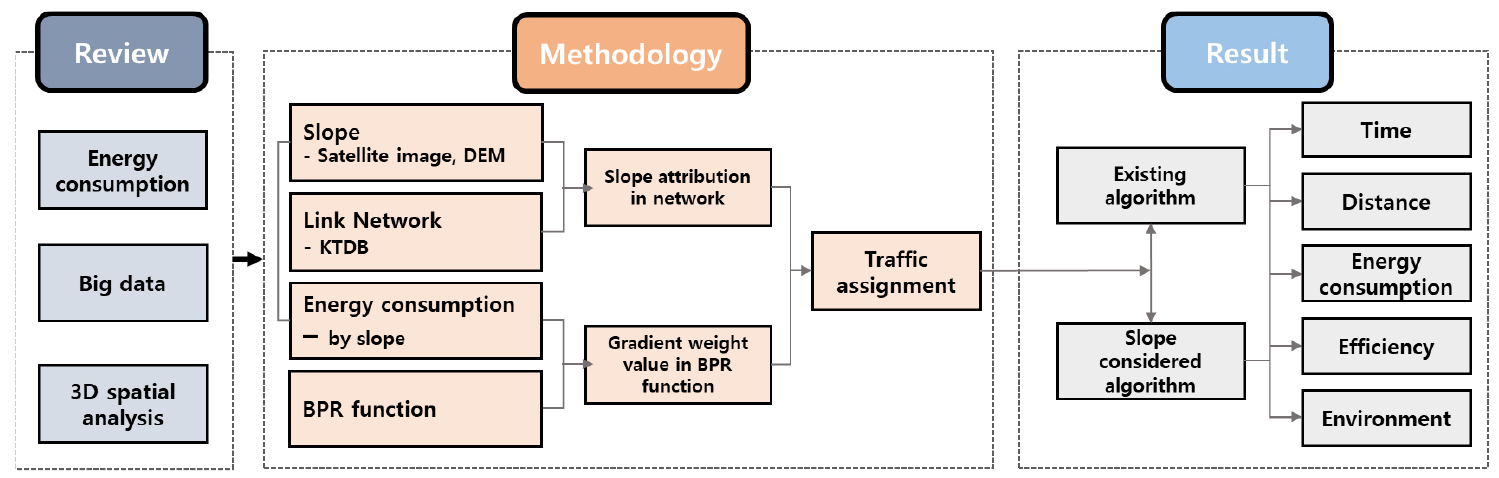
연구의 흐름은 다음 Figure 1과 같이, 기존 교통 빅데이터에 경사 속성 부여, 전기차 효율 검토, 전기차 효율과 경사 속성 정보 기반의 경로 산정 가중치 산출로 진행되며, 그 효과는 총통행시간, 총 통행거리, 에너지효율 변화, 환경측면에서의 효과로 제시한다.
1. DEM을 이용한 경사도 산정
DEM은 다양한 모델이 있으며, 각각의 모델은 좌표체계, 지형 레이어의 설정 기준에 따라 구분된다. 본 연구에서는 국토지리정보원에서 제공한 WGS84 체계의 영상정보를 활용하고 해당 좌표체계의 수직 데이터를 분석, 경사를 계산할 수 있는 Cartosat DEM 모델을 활용하였다. 타원체의 높이(h)는 직교 높이인 지오이드 표면 위의 높이(H)에 지오이드 높이/지오이드 기복(N)을 이용하여 아래 Equation 1과 같이 계산된다(Mukherjee et al., 2013).
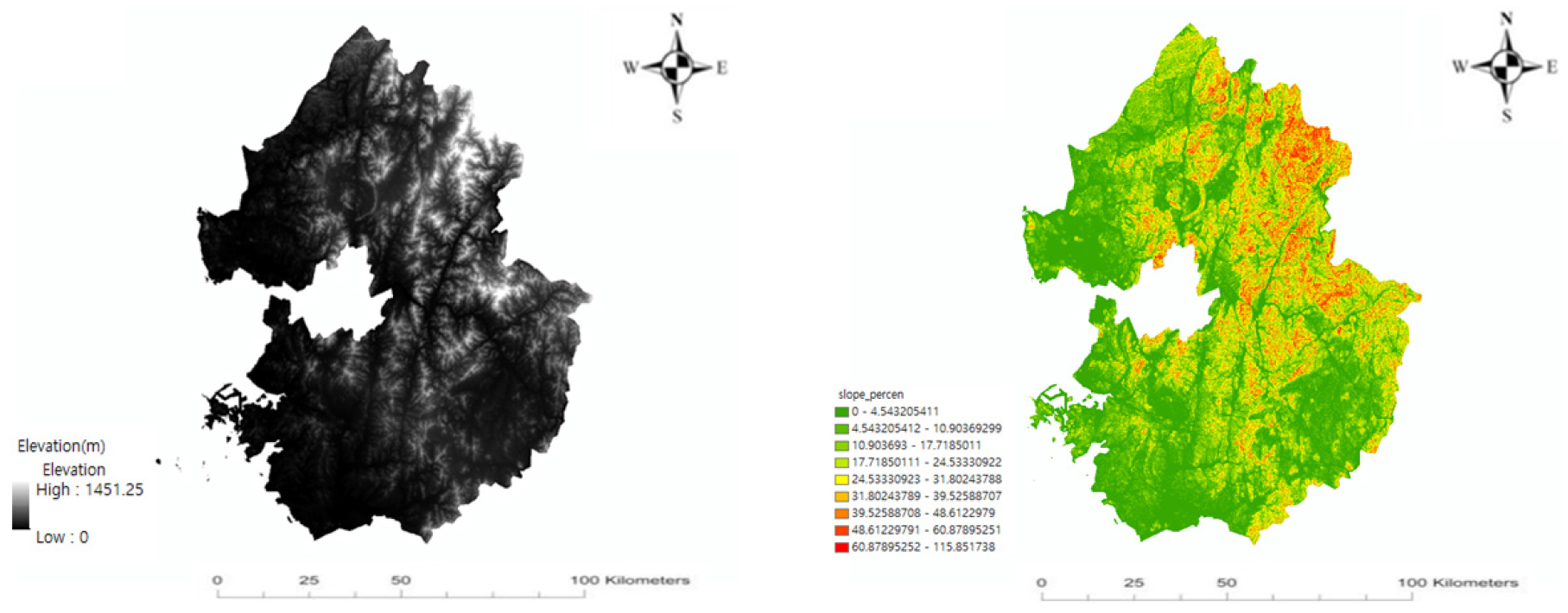
경사는 고도의 변화율을 설명하는 1차 도함수로 표면의 주어진 지점에서 기울기에 대한 높이 값의 함수이다. Equation 2와 같이 x 선상에서의 기울기와 y 선상에서의 기울기는 표면의 기울기 벡터를 정의한다. 이때 x, y 기울기는 3차원 높이 z 방향에 의해 미분을 통해 정의한다. 본 연구는 기울기의 두 가지 직교 구성요소인 x 및 y 방향을 고려하는 Four Closet Neighbor(FCN) 알고리즘을 사용하여 기울기 계산하였다. 오르막 영역에서 Maximum adjacent gradient, Multiple downhill neighbours, Eight neighbours unweighted, Four diaglonal neighbours, One over distance square, 그리고 Maximum downhill gradient 알고리즘 중 현재까지 연구에서 FCN 알고리즘의 오류가 제일 낮아 해당 알고리즘을 선정하였다(Raaflaub and Collins, 2006). 알고리즘은 2차 유한 차분 관계를 나타내는 동서남북 4개의 중요 방향에 대해 다음 Equation 3과 같이 계산하였다. Figure 2(left)와 Figure 2(right)는 각각 타원체고에서의 지오이드(geoid)와 경사도(gradient) 계산의 예시이다.

DEM의 해상도가 높을수록 표면이 잘 표현되지만, 데이터 오류의 영향도 동시에 증가하여 해상도 차이가 경사도에 주는 영향이 미미함을 파악했다. 따라서 알고리즘의 오류를 배제한다면 알려진 평균 기울기와 DEM 오류를 고려하여, 적합한 DEM 해상도를 아래 Equation 4와 같이 결정할 수 있다(Zhou and Liu, 2004).
여기서, 는 그리드 해상도, b는 m에 대한 계수, m은 DEM 오류, 는 얻어진 경사도의 평균 제곱근 오차, 는 평균 경사를 의미한다.
DEM의 경사도 정확성에 영향을 주는 요인은 DEM 값의 정확성이다. Han et al.(2021)은 서울시의 경사도 산출을 위해 1m 단위의 DEM 자료를 통해 계산하였다. 하지만 해발고도를 기준으로 계산되는 특성으로 인해 터널과 교량의 종단경사가 부합되지 않게 계산되어 개별 경사도를 산출하는 기술적인 방법의 필요성을 제시하였다. 서울시 DEM 데이터를 사용하여 경사도를 파악한 후 터널, 교량 등과 같은 구조물 등의 올바른 높이와 경사도를 도입함으로써 오차를 줄일 수 있다.
2. Electric Vehicle(EV) 에너지 소비 모델
전기차의 배터리 소비량은 주변 환경에 큰 영향을 받는다(Al-Wreikat et al., 2022). 주변 온도, 에어콘 설정, 배터리 효율 등 다양한 변수를 통해 전기를 소비하고 이에 따라 배터리의 소비되는 양이 달라진다. 배터리 소비량의 변화에 따라 1회당 주행할 수 있는 주행거리와 전력소비량, 탄소 배출량에도 변화가 생긴다(Rahman et al., 2022). 이러한 환경적 요인 중 도로의 경사도는 전기차의 에너지 소비를 변화시키는 큰 요소 중 하나이다(Faria et al., 2019). 경사도의 변화에 따라 전기차의 에너지 소비는 양의 선형적인 영향을 받아 경사가 높을수록 손실이 크다(Liu et al., 2017). 한국은 70% 이상이 산악지형으로 경사의 변화가 자주 발생한다. 본 연구는 이러한 경사도에 따른 에너지 소비모델을 제작하여 배터리 사용 효율을 상승시키려고 한다.
선행연구에서 전기차의 에너지 소비량을 측정하기 위해서 거리, 고도 등 여러 변수를 기반으로 한 종단 모델이 연구되었다(Ehsani et al., 2018). 전기차가 경사로를 등반하기 위해서는 전기모터가 차량 가속을 위해 추가 견인력이 필요하다. Equation 5는 EV의 견인력 Force of Traction()을 정의한 것이다.
여기서, 은 EV의 저항을 나타내며, a는 차량의 가속도, 는 회전 부품의 질량 계수 그리고 은 차량 질량을 의미한다. 다음으로 차량이 주행할 때 적용되는 저항력은 경사, 구름 그리고 공기 저항력으로 구성된다. EV의 저항은 이러한 3가지를 고려하여 다음과 같이 Equation 6를 통해 계산한다.
여기서, 은 경사저항, 는 구름 저항, 은 공기저항, 는 중력가속도, 는 도로의 경사각, 는 도로의 마찰계수, 는 EV의 속도, 는 공기의 밀도, 는 차량 전면 면적 그리고 는 공기저항계수를 의미한다.
EV 배터리에 연결된 모터는 차량 이동을 위한 견인력을 제공한다. Equation 7은 에너지효율에 의해 기본전력소비 시 발생하는 추가적인 에너지 손실 값, EV의 배터리 전력 소비()를 나타낸다.
여기서, 은 전력 소비와 모터 그리고 변속기의 에너지효율, 는 전기동력의 기본소비량이자 주 소비량이다. 에서는 자동차의 보조부품으로 인한 추가적인 전력 소비도 포함한다.
전기에너지 소비모델인 은 Equation 8과 같이 나타낼 수 있다.
3. 경사 가중치 계수의 적용
출발지에서 목적지까지 도착하기 위해 주로 최적 최단 경로 알고리즘이 사용된다. 알고리즘은 차량의 속도와 도로의 용량을 기반으로 하여 효율적인 이동을 수행하기 위해서 VDF(Volume Delay Function) 값의 할당이 필요하다. VDF 함수는 정의된 도로 링크의 교통량에 따라 이동시간을 예측하는 함수로서, 교통수요추정, 통행발생 및 도착, 교통 네트워크 분석 등 다양한 방면에 적용되고 있다. 최근에는 통행에 필요한 정확한 시간과 속도를 계산하기 위해 VDF를 개선하려는 노력이 다양한 방면으로 등장하고 있다. Fernandes(2021)는 사람이 운전하는 차량과 자동화된 차량이 섞일 때 발생하는 교통혼잡을 고려하기 위해 VDF의 개선방향을 제시했다. Paszkowski(2021)는 비디오 궤적분석과 미시적 관점으로 VDF 모델링을 통해 불확실성을 고려하여 차량의 경로 배정을 개선하고자 하였다. Lazar et al.(2020)은 도로의 전체 흐름을 고려하여 용량을 매개 변수화하여 혼합 자율교통 분석 기능을 확장하는 VDF 개선을 제안하였다.
하지만 현재 통행배정에 적용되는 VDF는 기본적으로 모든 도로의 구간의 종단선형을 고려하지 않고 있다. 즉, 전기차 기반의 자율주행 대중교통 서비스 제공 시 경사로에 따른 주행성능의 변화, 이로 인한 이동시간의 증가 혹은 등판능력 이상의 경사로에서 이동할 수 없음을 고려할 수 없다. 따라서 본 연구에서는 VDF의 최단경로 탐색방법의 정확도 향상을 위하여 전기차 기반 자율주행 통행의 특성을 반영하는 경사가중치를 추가하였다. 가중치는 도로에서 용량제약 없이 주행할 수 있다는 가정을 통해 자유교통류에 필요한 가중계수를 계산하고 경사면에서 전기차 소모량을 고려하였다(Equations 9 and 10).
여기서, 는 link 의 통행시간(일반화비용, 분), 는 link 의 자유통행속도, 는 교통량 대 용량 비율(passenger car unit per hour, pcu/h로 제작), 와 는 매개변수(=0.15, =4), 는 경사를 포함한 링크 길이, 그리고 는 링크 i의 경사의 가중치이다.
Liu et al.(2017)는 Equations 5, 6, 7, 8까지의 공식들을 사용하여 속도와 경사도에 의해 배터리 효율이 선형임을 확인하고 경사각에 따른 에너지효율 방정식을 산출했다. 본 연구는 에너지효율 방정식을 응용하여 구체적인 경사각, 속도에 따른 에너지 가중치()를 산정하였고 Table 1과 같이 정리하였고 에너지 가중치를 통해 새로운 VDF 시스템과 네트워크를 개발하였다. 이를 통해 EV가 경사진 도로를 주행하면서 경사가 EV 배터리 소모 및 속도에 미치는 영향을 분석하였다.
이러한 전기차 기반 자율주행의 속도로 인한 배터리 소비량 변화와 경사도를 연결하는 선행모델은 가중치, 속도, 경사와의 관계를 분석하기 위해 표현되었다. 가중치는 일반화 비용으로 경사가 0일 때 추가로 반영하지 않았다. 가중치의 증가는 전체 경로 할당에 영향을 미치며 시속 20km의 전기차를 대상으로 한 분석을 바탕으로 가중치 기준이 설정되었으며 이를 통해 배터리 효율과 경사도의 관련성을 검증하였다. 위의 내용을 바탕으로 기존연구(Graser et al., 2015)에서 제안한 바와 같이 속도 대비 소모량 변화율을 가중하여 자유통행속도 및 경사도에 따른 EV 배터리 소모량을 확인하였다. EV가 같은 20km/h의 속도로 주행할 때 가중치를 적용한 결과, 에너지 소비량이 증가하는 것을 확인할 수 있었다. (1% 기울기에서 약 0.064 더 높았으며, 2%의 기울기에서 0.083, 3% 기울기에서 0.093 더 높았다) 또한 10km/h의 속도로 주행할 때 에너지 소비가 약 10-15% 증가하는 것을 확인할 수 있다. 전기자동차의 에너지 소비량에 대한 선행연구(Liu et al., 2017)와 반대로, 본 연구에서는 자유통행속도와 경사도에 따른 에너지 소비량은 경사도 가중치 인자의 추가에 따라 영향을 받는다는 것을 확인하였다.
Table 1.
Weighted value of travel time and energy consumption according to gradient and free flow speed
4. 최단거리 경로 탐색 알고리즘
최단거리 통행배정은 주어진 시작, 종점 간 통행량을 교통 네트워크에 배정하는 과정이다. 통행배정은 교통의 수요와 공급의 균형에 기본원리를 두고 있다. 통행배정에서는 주로 이용자균형(User Equilibrium)이 사용되고 있으며, 이번 연구에서는 이용자균형 통행배정 기법을 사용하여 결과를 도출하였다. 통행배정은 각 시작, 종점 간에 비용이 최소가 되는 경로를 탐색하는 부분과 통행량을 교통네트워크에 배정하는 부분으로 나뉜다. 이용자균형 통행배정은 Wardrop(1952)의 첫 번째 통행경로 선택에 기반을 두고 있으며, 통행자는 통행시간을 최소화하는 통행경로를 선택한다는 가정에서 시작한다(Equation 11).
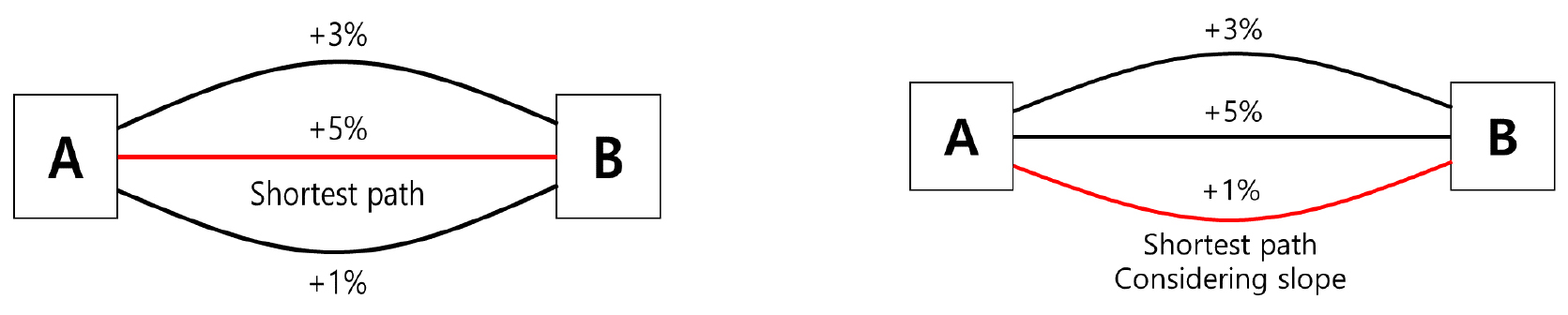
여기서, 는 각 구간이며, 는 통행비용, , 는 각 구간 교통량이다. 이때 는 일반화비용으로 Equation 9의 와 동일하다. 이용자균형 통행배정이 여러 존을 연결하고 각 경로를 여러 구간으로 구성된 교통 네트워크로 일반화한다고 가정하면, Equation 12와 같은 식을 얻을 수 있다. 이번 연구에서는 최단거리로 통행하는 Figure 3(left)의 경우에 경사도를 반영한 링크함수를 적용하여, Figure 3(right)과 같이 최단경로가 변경되는지에 대한 분석을 수행하고자 한다.
여기서, 는 출발지 존, 는 도착지 존, 은 경로, 은 출발지 와 도착지 사이의 경로 의 교통량이며, 는 출발지 i와 도착지 j 사이의 통행배분, 는 i에서 j까지의 경로 r에 구간 a가 포함되어 있으면 1, 없으면 0인 계수이다.
결과
1. DEM 기반의 경사 속성 부여
본 연구는 경기도 전역을 공간적 범위로, 2019년을 시간적 범위로 산정하였다. 경사도 분석에 적용한 위성사진은 가장 최신 자료인 2014년 자료를 적용하였다. 다만, 경사도는 단기간에 변화가 없을 것으로 판단하였다. 항공위성사진은 국토교통부 국토지리정보원에서 제공하는 수치표고 기본메타데이터를 사용하였다.
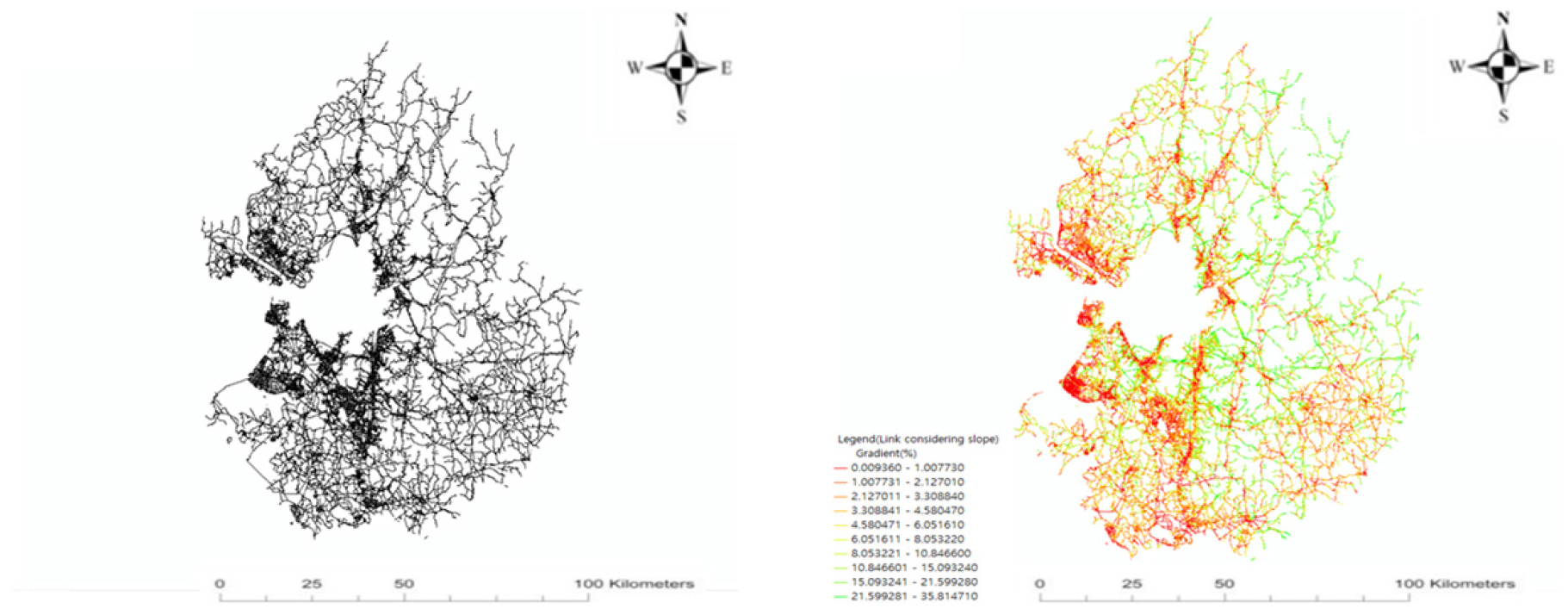
제공받은 수치표고 데이터를 Equations 1, 2, 3, 4를 사용하여 아래 Figures 4, 5와 같이 표현하였다. 경기도 지역의 3차원 정보를 얻어 고도에 따라 Figure 4(Left)과 같이 표현하였으며, DEM 기반의 지역별 경사를 Figure 4(Right)과 같이 확인하였다. 경기도 도로망 데이터는 ITS 국가교통정보센터에서 제공하는 정보를 사용하여 네트워크 링크를 Figure 5(Left)와 같이 산출했다. 이후 폴리곤 단위로 변환하여 네트워크 링크 정보와 매칭시켜 Figure 5(Right)과 같이 도로 네트워크에서의 경사도 자료를 산출하였다. 이를 통해 차로별 평균거리, 도로 폭, 최대통행속도, 밀도 등의 정보를 확인하였다.
결과에 대해 두 가지 다른 형태의 분포를 사용하여 시각화하였다. 각 차선당 경사의 분포도를 Box plot 형태로 Figure 6(Left)와 같이 시각화하였으며, 이를 통해 1, 2차선에서 경사도가 높은 비율을 차지하는 것을 확인할 수 있다. Figure 6(Right)는 차선당 경사와 링크 거리의 비율을 보여주면서 차선 수가 증가함에 따라 노선의 길이가 감소함을 식별하였다.
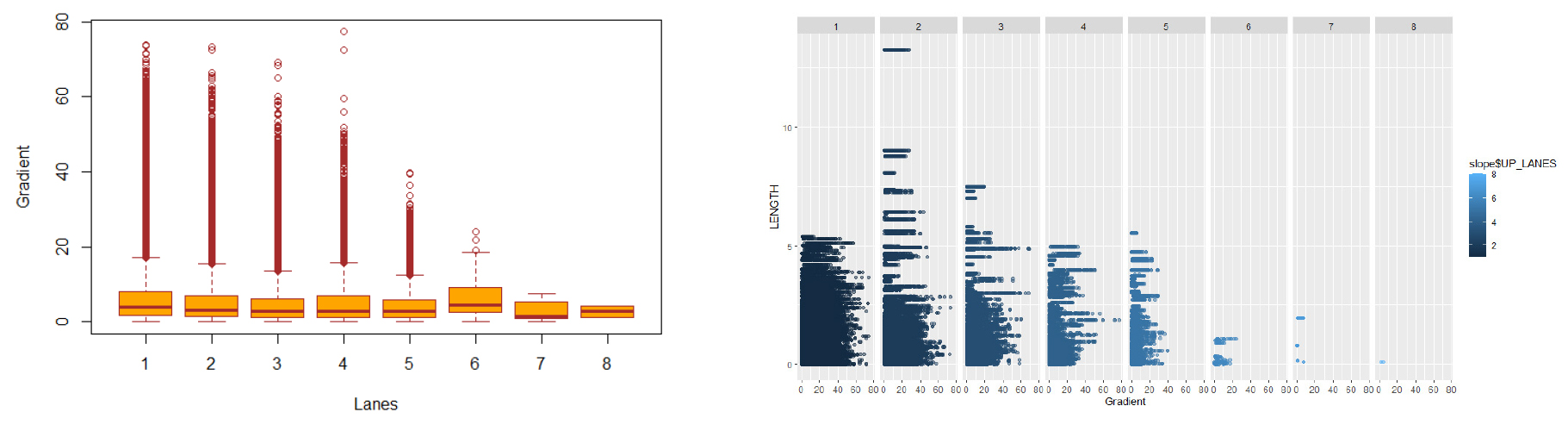
이어서 차선별 총길이, 경사의 평균과 최대경사, 표준편차를 Table 2와 같이 산출하였다. Table 2의 결과를 통해서 2개 혹은 3개의 차선이 있는 좁은 링크에 높은 기울기들이 분포함을 확인하였다. 이 기울기 데이터를 사용하여 특정 기울기에서의 지형 가중치 계수와 에너지효율을 계산할 수 있다.
Table 2.
Average and maximum gradient according to the number of lanes
2. 경사도 기반의 알고리즘 평가
전국 네트워크 노선에서 속도를 네트워크 속성에 맞춰 고정한 경우와 에너지 소비를 일률적으로 고정한 경우, 2가지 방법을 통해 Vehicle Kilometer Traveled(VKT), Vehicle Hours Traveled(VHT)를 분석하였다. 이때 전체 승용차통행량 중에 전기차의 비율은 Weibull 분석을 통해 예상되는 2030년 비율인 7.6%를 사용하였다(Choi et al., 2020). 두 경우 모두 통행시간은 감소, 통행거리는 증가하였으며 이에 따라 VKT는 증가, VHT는 감소하였다. 두 경우 중 에너지소비를 고정하였을 경우가 더 효과적으로 나타났으며 각 VKT, VHT의 값은 아래 Tables 3, 4와 같다. 알고리즘으로 인해 전기차들이 우회하면서 거리는 증가하였지만, 링크 전체적인 관점에서는 우회를 통해 부하가 낮아져 전체적인 통행속도 증가로 이어져 최종적으로 통행시간이 감소되는 것으로 분석되었다.
Table 3.
Speed fixed though network properties in entire route
| Before (Shortest path) |
After (Lowest energy consumption) | Difference | Difference ratio | |
| VKT | 786,098,205 | 815,576,888 | 20,988,822 | 2.67% |
| VHT | 19,427,643 | 18,285,298 | -615,856 | -3.17% |
Table 4.
Energy efficiency fixed though network properties in entire route
| Before (Shortest path) |
After (Lowest energy consumption) | Difference | Difference ratio | |
| VKT | 786,098,205 | 815,576,888 | 29,478,683 | 3.75% |
| VHT | 19,427,643 | 18,285,298 | -1,142,345 | -5.88% |
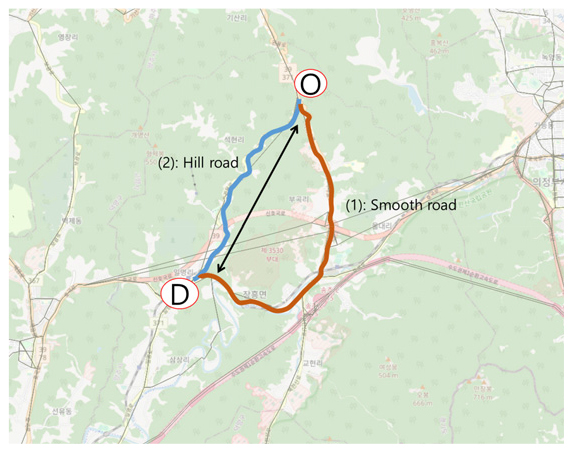
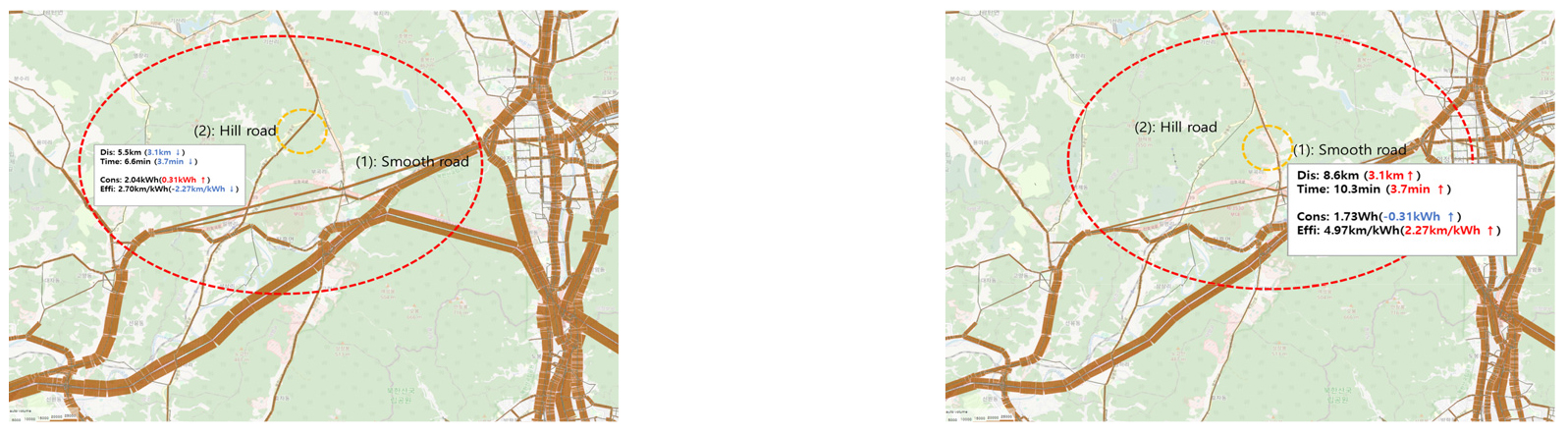
본 연구는 전국 네트워크 분석 이후 Case study를 통해 알고리즘을 통한 경로 변경이 이루어지는지 확인하고자 하였다. Case study에서도 위의 전체 네트워크 분석과 같은 전기차 비율과 두 가지 알고리즘을 적용하여 경기도 노선을 예시로 표현하였다. Figure 7과 같이 경기도 시범지역으로 정한 부곡리의 경사가 높은 언덕노선과 평지노선을 비교하였다. Figure 8(Left)은 기존 알고리즘을 통해 선택된 언덕노선을 주행했을 때 나타나는 데이터들을 나타내었고, Figure 8(Right)은 새롭게 적용한 알고리즘을 통해 선택된 평지노선을 주행했을 때 나타나는 데이터들을 보여주었다. 이를 정리하여 Table 5와 같이 알고리즘별 이동거리, 이동시간, 에너지소비량, 에너지효율을 비교하였다. “Before” 열은 최단거리 알고리즘 데이터를 나타내고 “After” 열은 가장 낮은 에너지 소비 알고리즘 데이터를 표현한다. 동일한 사양의 EV, 전기차 기반 자율주행 모빌리티가 50km/h의 속도로 주행했을 때, 두 번째 알고리즘의 이동거리는 5.5km에서 8.6km로 3.1km 증가하였으며 이동시간은 6.6분에서 10.3분으로 3.7분 증가하였다. 에너지 소비는 2.04kWh에서 1.73kWh으로 0.31kWh만큼 감소하였으며 에너지효율은 2.70km/kWh에서 4.97km/kWh으로 2.27km/kWh 증가하였다. 이를 통해 운전자에게 에너지 효율성이 높은 경로를 제공할 수 있다. 위와 같은 방법을 통해 전기차의 최적경로를 새롭게 할당한다면 이전 노선보다 에너지소비가 적은 운행이 가능하다.
Table 6에는 동일한 에너지 소비에서의 이동거리, 이동시간, 평균속도 및 에너지효율의 차이를 나타내고 있다. 2.5kWh의 에너지 소비로 주행하였을 때 이동시간이 약 0.47분 단축되었다. 이 결과는 기울기에 따라 달라지는 주행성능에 따른 속도의 차이 때문이었다. 이 방법으로 도출한 경로를 사용하면 동일한 에너지의 소비를 통해 더 짧은 시간 안에 목적지에 도달할 수 있다.
결론
탄소중립 달성을 위해 친환경 교통수단이 요구되는 실정에서, 전기차와 자율주행 기술을 접목한 수요응답형 교통체계(DRT) 도입을 위해서 전기차의 배터리 효율을 증가시키고 사고위험을 감소할 수 있는 경로 제공 방법이 필수적으로 요구된다. 전기차 기반의 자율주행 대중교통 서비스 제공에 있어 수요에 따른 실시간 경로 산정 시 경사도에 대한 정보를 전혀 구득할 수 없는 상황에서 등판능력을 고려하지 않은 경로를 활용하여 서비스가 제공될 경우 배터리 효율 감소와 안전사고의 위험성을 포함하게 된다. 특히 수요응답형 교통체계(DRT)의 주된 수요 타겟이 last mile에 존재하는 승객층임을 고려할 때 우리나라와 같이 이면도로 등 오르막 구간이 많은 한국형 지형에서 전기차의 등판능력을 고려한 경로 제공 방법은 배터리 효율성의 증대 효과뿐만 아니라 교통사고 위험을 감소시켜준다는 측면에서 매우 중요하다. 따라서 본 연구는 DEM을 활용하여 경사도 속성을 포함한 경로 산정 모델을 구현하고, 이를 토대로 전기차 기반의 대중교통 서비스 운행 시 경사도를 고려한 최적경로의 효율성을 측정하는 연구를 수행하였다. 즉, 새로운 변수인 경사 데이터를 사용하여 전기차 기반 자율주행 모빌리티의 경로 탐색 과정에 경사 속성을 고려한 알고리즘을 개발하였으며, 이를 통해 보다 효율적인 전기차 기반 자율주행 모빌리티 운행이 가능하도록 하였다. 이러한 개선된 알고리즘을 기반으로 경사도가 높은 산악 지역에서는 최적 경로의 거리가 증가하더라도 에너지효율을 최적화할 수 있도록 계산되어 배터리 효율이 향상되는 것을 확인하였다.
기존 알고리즘과 개선된 알고리즘의 두 가지 다른 방법을 사용하여 이동시간과 에너지 소비량을 도출하여 에너지효율을 비교ㆍ검증한 결과, 제시한 알고리즘에 의해 경사도를 고려한 경로를 이용함으로써 통행거리가 증가하더라도 에너지 소비량이 줄어 효율성이 높아지고, 경사로에 따른 주행성능 차이에 의해 통행시간은 오히려 단축되는 효과를 보임을 입증하였다. 이는 본 연구의 핵심인 전기차 기반의 자율주행 대중교통 서비스 제공에 있어 실시간 수요에 따른 최적경로 산정 시 활용될 수 있다. 그리고 제안된 알고리즘에 의해 효율적인 운행이 가능하며, 전기차의 등판능력을 고려하기 때문에 안전사고 방지에 기여할 것으로 판단된다. 현재 경로산정을 위한 네트워크 데이터에 경사도 정보가 없는 상황에서 제시된 알고리즘과 기존 구글 지도의 경로 탐색 서비스를 결합하고 도로 경사도를 고려하면 전기차 기반의 수요응답형 교통(DRT)의 안전하고, 에너지효율을 고려한 최적의 경로를 선택할 수 있을 것으로 기대된다. 이는 사용자의 교통 편의성과 전기 자동차의 에너지 효율성 향상에 긍정적인 영향을 미칠 것이다. 이 과정을 통해, 친환경 교통수단의 활성화와 전기차 교통량 증가에 따른 탄소배출량 저감이 가능하다.
하지만 본 연구에서는 음(-)경사에서 발생하는 회생제동 기능에 대한 고려하지 못한 한계점이 존재한다. 회생제동은 내리막길에서 엑셀을 누르지 않을 경우 에너지를 얻게 되며 이를 통한 에너지 효율증가를 가져온다(Qiu and Wang, 2016). 하지만 각 차종별, 단계별 에너지 회복량이 다르며, 엑셀을 통한 가속, 혹은 사용자의 설정에 따라 회생제동 기능을 사용하지 않는 경우도 발생한다. 따라서 본 연구에선 반영하지 않았다.
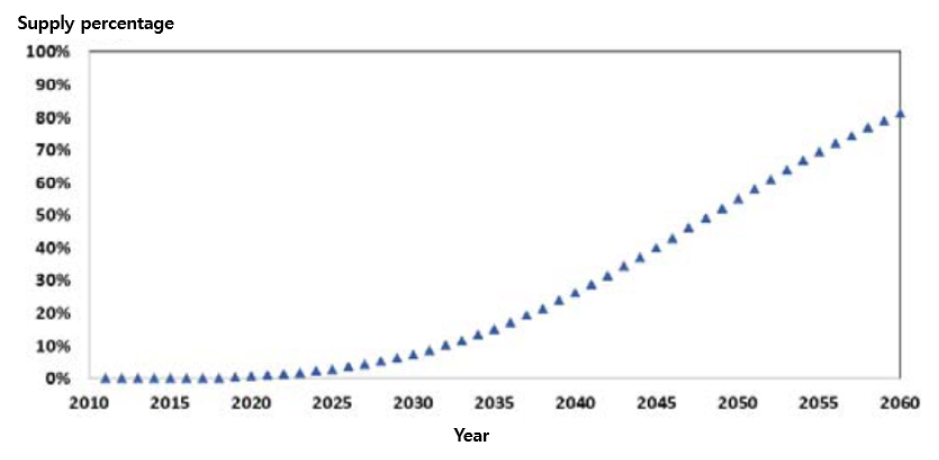
또 다른 한계점으로는 전기차 보급률 증가로 생기는 새로운 혼잡구간으로 인해 시간이 늘어나는 미시적 분석 결과의 부족이다. 전기차의 보급은 꾸준히 증가해왔으며, 지속적으로 증가한 전기차의 보급률은 향후 Figure 9와 같이 Weibull 분석을 통해 2030년에는 보급률이 전체차량의 7.6%를 넘을 것으로 보인다(Choi et al., 2020). 변화하는 전기차 보급률에 따라 전체 네트워크에 미치는 영향들이 달라질 것이다. 기존 내연차 경로와 다르게 경사를 우회하는 차량이 많아져 혼잡구간 해소가 이루어지는 반면, 전기차 추가할당으로 인한 새로운 혼잡구간이 생길 것으로 예상된다. 전기차의 우회로 인해 새롭게 생기는 혼잡은 오히려 에너지 효율성의 절감을 가져올 것으로 예상된다. 하지만 해당 부분에 대한 연구결과가 부족하며 차후 보완이 필요하다.
마지막으로, 현재 자율주행 대중교통은 전기 기반으로 자율주행 시범지구에서 운영되고 있지만, 경사등판의 문제로 평지를 대상으로 ODD 영역을 포괄하고 있다. 다만, 해당 자율주행 대중교통은 10인승 내외의 시범차이다. 향후 효율이 향상된 전기차 기반의 자율주행 대중교통 모빌리티가 상용화된다면 연구 결과는 다르게 도출될 수 있다.
향후 연구는 교통상황을 실시간으로 반영할 수 있는 환경에 알고리즘을 적용할 수 있도록 연구해야 한다. 다양한 도로 환경의 반영을 위해 전기차의 회생제동과 지형뿐만 아니라 친환경 교통 효율성에 영향을 미치는 요인을 분석하고 변수로 추가한다면 더욱 개선된 알고리즘이 도출될 것이다.
