

서론
기존연구고찰
1. 회전교차로 및 곡선구간 안전성 평가 관련 연구
2. 시뮬레이션 기반 혼합교통류 관련 연구
3. 시사점
분석 방법론
1. 분석 과정
2. 시뮬레이션 기반 AV 거동 구현
3. 주행 실험 및 데이터 수집
4. 평가 방법론 개발
분석 결과
1. 기초통계량 및 주행속도 프로파일
2. 슬라이딩 윈도우 기반 단위 구간 평가
3. 공통 안전성 취약 구간 도출
결론
서론
자율주행에 대한 연구와 기술 개발이 활발히 수행됨에 따라 관련 도로 인프라 구축 및 자율주행차량(Autonomous Vehicle, AV) 상용화를 위한 정책이 마련되고 있다. 국제 자동차 기술자 협회(SAE international)는 차량의 운전 자동화 수준에 따라 6단계로 구분하였으며, 현재 국내에서는 Level 4 및 Level 4+에 해당하는 자율주행기술이 실증사업 단계에 있다. 자율차 보급률(Market Penetration Rate, MPR)은 가까운 장래에 크게 증가되지 않을 것으로 예상됨에 따라(Bansal et al., 2017; Talebpour et al., 2017), 자율차와 비자율주행차량(Manually-Driven Vehicle, MV)이 혼재된 교통 상황이 상당 기간 지속될 것으로 판단된다. 자율차는 비자율차 보다 인지반응시간이 짧을 것으로 예상되며, 급격한 가‧감속과 같은 위험주행 행태가 감소할 것으로 보고되었다(Zhu et al., 2020). 이에 따라 자율차와 비자율차 간의 주행특성 차이는 전반적인 교통류에 근본적인 변화를 가져올 것으로 예상된다(Kanagaraj et al., 2018; Zheng et al., 2020). 따라서, 자율차 상용화를 대비하여 자율차와 비자율차가 혼재된 교통환경에서 예상되는 차량 간 상호작용을 선제적으로 파악하여 대응책을 마련할 필요가 있다.
로터리 및 회전교차로는 여러 기존 연구들에서 평면교차로에 비해 교통안전 측면에서 성능이 우수함이 입증되었다. 로터리와 회전교차로의 가장 큰 차이는 통행 우선권으로 로터리는 진입 차량이, 회전교차로는 회전 차량이 통행 우선권을 부여받는다. 그러나, 이와 같은 운영방식의 차이는 혼동을 발생시킬 수 있으며 이에 따라 행정안전부는 ‘2019년 회전교차로 활성화 추진’을 통해 기존 로터리를 회전교차로로 전환한다고 밝혔다. 따라서, 본 연구에서는 로터리와 회전교차로를 구분하지 않고 회전교차로 하나의 교차로 형식으로 고려하였다. 회전교차로를 통과하는 운전자는 저속으로 주행함에 따라 사고 심각도가 감소할 것으로 예상되며(Riccardi et al., 2022; Wang, 2022), Highway Safety Manual(2010)에 따르면 평면교차로를 회전교차로로 전환 시 상해 사고가 82% 및 충돌 사고가 44% 감소한 것으로 분석되었다. 그러나, 대부분의 선행 연구는 회전교차로의 안전성 평가 및 예측 시 도로 기하구조, 교통량 등의 데이터를 활용하는 Safety Performance Function(SPF) 기반의 분석을 수행하였다(Montella, 2011; Chen et al., 2013; Diana et al., 2019). 또한, 회전교차로 안전성 취약 구간 분석 시 사고 이력 및 교통 자료를 활용하여 취약 구간을 식별한 연구가 수행되었다(Montella, 2011; Shawky et al., 2023). 추후 자율차 상용화를 대비하여 회전교차로를 통과하는 자율 및 비자율 차량의 주행패턴을 분석하기 위한 안전성 평가 방법론 개발이 필요하다.
본 연구의 목적은 자율차 도입을 대비하여 회전교차로를 대상으로 자율 및 비자율 차량 추종 상황에서 비자율차의 안전성을 분석하고 최종적으로 회전교차로 내 안전성 취약 구간을 도출하기 위한 방법론을 개발하는 것이다. 본 연구에서는 2대의 주행 시뮬레이터가 실시간으로 연동된 Multi-agent Driving Simulator(MADS)를 활용하였다. 주행 시뮬레이션을 이용하여 실도로 기반 가상의 네트워크를 구축하였으며, 자율 및 비자율 차량 추종 상황을 구현하였다. 회전교차로 내 안전성 취약구간 식별을 위해서는 평면곡선 구간의 안전성을 평가한 연구를 참고하여 3가지의 횡방향 안전성 평가지표를 선정하였다. 최종적으로 슬라이딩 윈도우(Sliding window) 기반의 단위 구간 평가를 통해 평가지표별 안전성 취약 구간 및 공통 안전성 취약 구간을 도출하였다.
본 연구의 구성은 다음과 같다. 2장에서는 시뮬레이션 기반 회전교차로 위험 구간 분석에 관한 기존 연구 동향을 파악하고 본 연구의 시사점을 제시하였다. 3장에서는 MADS를 이용한 회전교차로 안전성 평가 방법론을 제시하였다. 주행 시뮬레이션 기반 자율 및 비자율 차량추종 상황 구현, 데이터 수집, 슬라이딩 윈도우 기반 단위 구간 안전성 평가에 대한 내용을 서술하였다. 4장에서는 본 연구에서 개발한 방법론을 적용하여 회전교차로 내 안전성 취약 구간을 도출하였다. 마지막으로 5장에서는 본 연구의 결과를 요약하고, 연구의 한계점 및 향후 연구 과제에 대해 서술하였다.
기존연구고찰
본 연구에서는 회전교차로에서 자율차를 추종하는 비자율차의 안전성을 평가하고 취약 구간을 식별하고자 한다. 이에 따라, 회전교차로 및 유사한 기하 구조적 특징을 지니는 곡선구간 안전성 평가 관련 연구를 고찰하였다. 또한, 시뮬레이션 실험설계를 위하여 시뮬레이션을 이용한 혼합교통류 환경 안전성 분석 관련 문헌을 검토하였다.
1. 회전교차로 및 곡선구간 안전성 평가 관련 연구
회전교차로 횡방향 안전성을 평가 방법론 개발을 위하여 회전교차로와 기하학적 구조가 유사한 곡선구간 안전성 평가 관련 연구를 조사하였다. Deluka Tibljaš et al.(2018)은 실재하는 회전교차로를 기반으로 미시교통시뮬레이션인 VISSIM을 이용하여 네트워크를 구축하고 위험 구간을 도출하였다. VISSIM으로부터 수집된 개별차량 궤적자료를 활용하여 상충 분석을 수행였다. 분석 결과 회전교차로의 진입부에서의 후미추돌 상충 건수가 가장 높은 것으로 분석되었다. Farahmand and Boroujerdian(2018)은 도로선형별 운전자 각성 수준을 평가하였다. 도로선형 변화에 따른 운전자 각성 수준을 평가하기 위한 지표로 조향각 평균 및 표준편차, Area b/w trajectory and road’s center line(ABTC)이 제안되었다. Kang et al.(2019)는 평면곡선 반지름, 곡선 길이, 교각 등 곡선부가 연속된 구간에서 평면선형 변화에 따른 주행행태 및 작업부하를 분석하였으며, 평가지표로 Lane position을 활용하였다. Mauriello et al.(2018)은 Lateral position 평균 및 표준편차, 횡방향 가속도 최대·최소값을 활용하여 평면곡선 반지름 및 곡선 방향에 따른 운전자 주행행태를 분석하였다. 곡선구간 안전성 평가 관련 연구 고찰 결과 조향각, Lane position, 횡방향 가속도 등이 평가지표로 활용되었으며 평균, 표준편차, 최대·최소값 등 다양한 통계량을 산출하여 분석을 수행한 것으로 보고되었다. 본 연구에서는 기존 연구에서 활용된 평가지표를 대상으로 회전교차로 안전성을 분석하고자 한다.
2. 시뮬레이션 기반 혼합교통류 관련 연구
주행 시뮬레이션을 이용하여 혼합교통류 환경 구현 및 안전성을 평가한 연구를 조사하였다. Rahmati et al.(2019)는 시뮬레이션 상에 혼합교통류 환경을 구현하기 위하여 MV-MV-MV pair, MV-AV-MV pair 두 가지 차량 추종 시나리오에 대해 분석을 수행하였다. 후행 비자율차에 대해 속도, 가속도, 차간간격을 분석한 결과, 선행차량이 비자율차량인 경우보다 자율차인 경우 후행 비자율차의 안전성이 증대되는 것으로 도출되었다. Zhang et al.(2023)은 혼합교통류의 안전성 평가를 위하여 자율차를 추종하는 비자율차의 주행행태를 분석하였다. Calvi et al.(2022)는 혼합교통류 상황에서 비자율차의 안전성 평가를 위하여 주행 시뮬레이션을 활용하였다. 자율 및 비자율 차량 추종 시 일반 주행상황 및 감속 상황에서 자율차가 비자율차에 미치는 영향에 대해 분석하였다. 주행 시뮬레이션 기반 혼합교통류 관련 연구 고찰 결과 대부분의 연구에서 시뮬레이터 상에 혼합교통류 환경을 모사하기 위하여 자율차를 추종하는 비자율차를 구현하였으며, 차량 간 상호작용 안전성을 중점적으로 평가를 진행하였다.
3. 시사점
선행 연구에서 활용된 이력 자료 및 SPF 기반 안전성 평가의 한계를 보완하고자 본 연구에서는 회전교차로와 곡선구간 안전성 평가 관련 연구 및 주행 시뮬레이션 기반의 혼합교통류 안전성 관련 연구를 고찰하였다. 선행 연구 고찰 결과 곡선구간 안전성 평가와 관련한 대부분의 연구에서 횡방향 안전성 평가지표를 활용하였으며, 시뮬레이션 기반 회전교차로 위험 구간 도출과 관련한 대부분의 연구에서 미시적 교통류 시뮬레이션 VISSIM 기반의 위험 구간 도출 관련 연구를 수행하였다. 또한, 주행 시뮬레이션 기반 혼합교통류에 대한 선행연구 고찰 결과 혼합교통류 구현 및 자율차와 비자율차의 상호작용을 분석하기 위하여 AV-MV pair를 설정하여 실험을 설계하였으며, 분석 결과 자율차의 주행행태로 인하여 비자율차의 주행 행태가 변화하는 결과가 나타났다. 본 연구에서는 회전교차로 안전성 평가 및 취약 구간 도출을 위하여 횡방향 안전성 평가지표인 횡방향 가속도 표준편차, 조향각속도 표준편차 및 Lane position 표준편차를 도출하였다. 또한, VISSIM은 차량 추종 모형 및 차로 변경 모형 등 내장된 차량 주행 관련 모형에 의해 시뮬레이션이 수행되므로 횡방향 안전성에 대한 평가는 미흡한 한계가 있다. 이에 따라, 본 연구에서는 혼합교통류 환경 구현 및 차량 간 상호작용을 고려하기 위하여 AV-MV pair를 설정하였으며 주행 시뮬레이션을 활용하여 회전교차로의 안전성을 분석하였다. 따라서, 본 연구의 주안점은 주행 시뮬레이션을 활용하여 자율 및 비자율 차량 추종 상황에서 회전교차로를 대상으로 횡방향 안전성 분석을 통한 도로 주행 취약 구간을 식별하는 것으로 선행 연구와 차별성을 가진다.
분석 방법론
1. 분석 과정
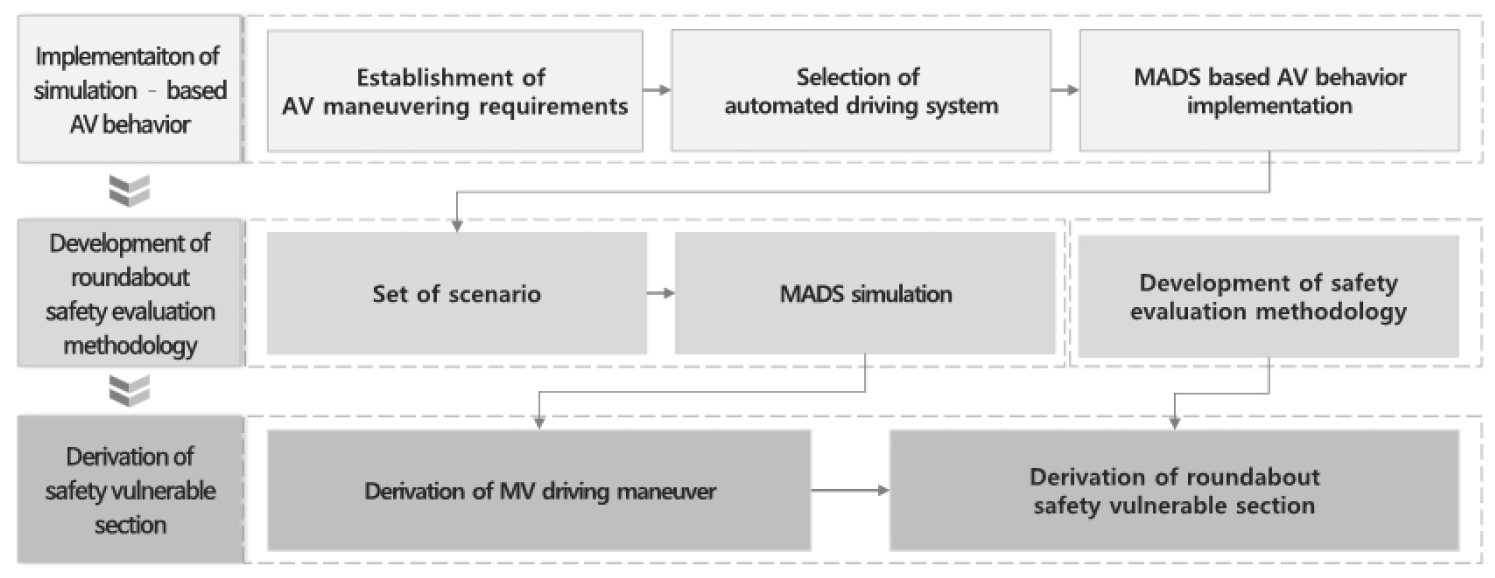
본 연구는 크게 세 가지 절차로 진행되었다. 첫째, 자율차 거동의 요구사항을 정립하고, 자율주행 기능을 선정하였으며 이를 통해 시뮬레이션 기반 자율차 거동을 구현하였다. 둘째, 차량의 횡방향 안전성 관련 평가지표를 조사하여 안전성 평가 방법론을 개발하였으며 평가를 위하여 시뮬레이션 시나리오를 설정하고 실험을 수행하였다. 마지막으로, 실험을 통해 수집된 데이터를 기반으로 안전성 평가지표 통계량과 속도 프로파일 등을 산출하였으며 이를 활용하여 회전교차로 안전성 취약 구간을 도출하였다. 분석 결과를 바탕으로 최종적으로 본 연구에서 제시한 평가 방법론의 활용방안, 한계점 및 향후 연구 방향을 제시하였다. 본 연구의 연구 흐름도는 Figure 1에 제시하였다.
2. 시뮬레이션 기반 AV 거동 구현
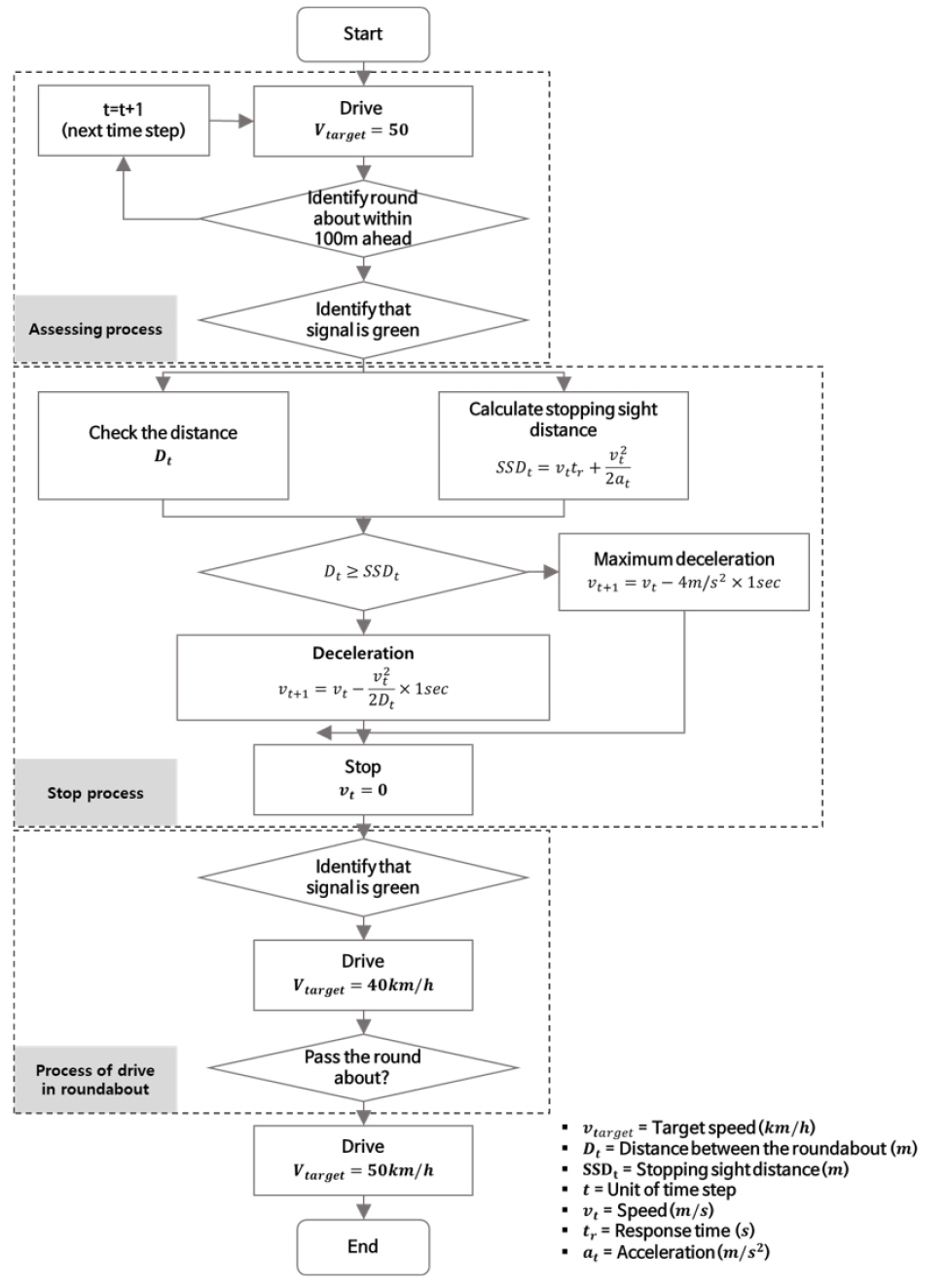
본 연구에서는 시뮬레이션 상에 자율차 거동 구현을 위하여 ‘추상화’개념을 적용하였다. 실제 기능 및 시스템에서 핵심적인 개념만 명확하게 간추려 단순화하는 작업을 추상화라고 하며 자율차 거동 추상화를 통해 과도한 연산 작업으로 인한 작업부하를 줄일 수 있다(Lee et al., 2018a). 자율차 거동 추상화를 위하여 먼저 자율차의 요구사항을 정립하였다. 자율차 설계 제원 중 센서 및 카메라 성능을 검토하여 최소 인식 거리를 기준으로 전방 센서 인지 범위를 설정하였다. 본 연구에서 설정한 전방 센서 인지 범위는 100m로, 이는 자율차 거동 알고리즘의 전방 교차로 인식에 활용되었다. 또한, 문헌 고찰을 통해 자율차와 자율차의 안전성, 안정성, 결정성 측면의 주행행태 차이를 정립하였다. 안전성 측면에서 자율차의 주행행태는 비자율차와 달리 스스로 위험 상황을 발생시킬 수 없는 특성이 존재하며, 적정 속도 및 가감속도를 유지하고 특별한 외부 자극 발생하지 않으면 종·횡방향 거동 변화가 없는 안정성 측면의 특성이 존재한다. 결정성 측면에서 자율차는 비자율차와 달리 동일한 조건에서 항상 일정한 주행행태를 보이는 특성을 나타냈다. 주행행태 차이 정립을 통해 자율차와 비자율차가 혼재하는 혼합교통류 환경의 현실적인 시뮬레이션 환경 구축이 가능하다. 분석 대상 차량은 SAE에서 제시한 Level 4 자율차를 선정하였다. 자율주행 Level 4 기능으로는 미국 도로교통안전국(NHTSA, 2018)에서 제시한 속도 유지, 차량 추종 등의 종방향 제어 기능과 차로변경, 합류 등의 횡방향 제어 기능인 Navigate roundabouts을 선정하였다. 마지막으로 Jo et al.(2022)에서 제안된 자율차 거동 요구사항을 고려하여 회전교차로 통과를 위한 자율차 거동 구현 알고리즘을 작성하였으며, Figure 2에 제시하였다. 작성된 알고리즘은 SCANeR의 Script editor 모듈을 통해 시뮬레이션 상에 구현하였다. 자율차는 회전교차로 진입 전 정지선에서 정지 후 회전교차로를 통과한다. 회전교차로 통과 시 자율차의 목표 주행속도는 40km/h이며, 회전교차로를 완전히 통과한 후 50km/h로 주행하도록 설정하였다. 주행 시뮬레이션 상 자율차는 차로 중심에서 벗어나지 않고 일정한 속도를 유지하며 주행한다.
3. 주행 실험 및 데이터 수집
본 연구의 분석 대상 구간은 경기도 수원시 팔달구에 위치한 팔달문 로터리로 선정하였으며, SCANeR에서 제공하는 Terrain editor를 활용하여 시뮬레이션 네트워크를 구현하였다. 구현된 네트워크의 총 연장은 550m이며, 제한속도는 50km/h이다. 회전구간 및 진입·진출부 곡선반경은 각각 약 40m와 18m이며, 차로폭은 약 3.5m인 4차로 로터리에 대한 네트워크이다. 네트워크 및 분석구간은 Figure 3에 제시하였다. 본 실험에서는 자율차와 피실험자 차량(비자율차) 총 두 대의 차량이 존재하며 주행 시나리오는 다음과 같이 구성된다. 첫째, 자율차와 비자율차 모두 회전교차로 진입 전 정지선에서 정지한다. 둘째, 녹색신호로 변경 시 회전교차로에 진입한다. 마지막으로, 회전교차로 9시 방향으로 진출하며 진출 후 제한속도 50km/h에 도달하기 위하여 가속한다. 실험 진행 중 피실험자는 선행 자율차를 추종하며 추월하지 않고 제한속도, 정지선 등을 준수한다.
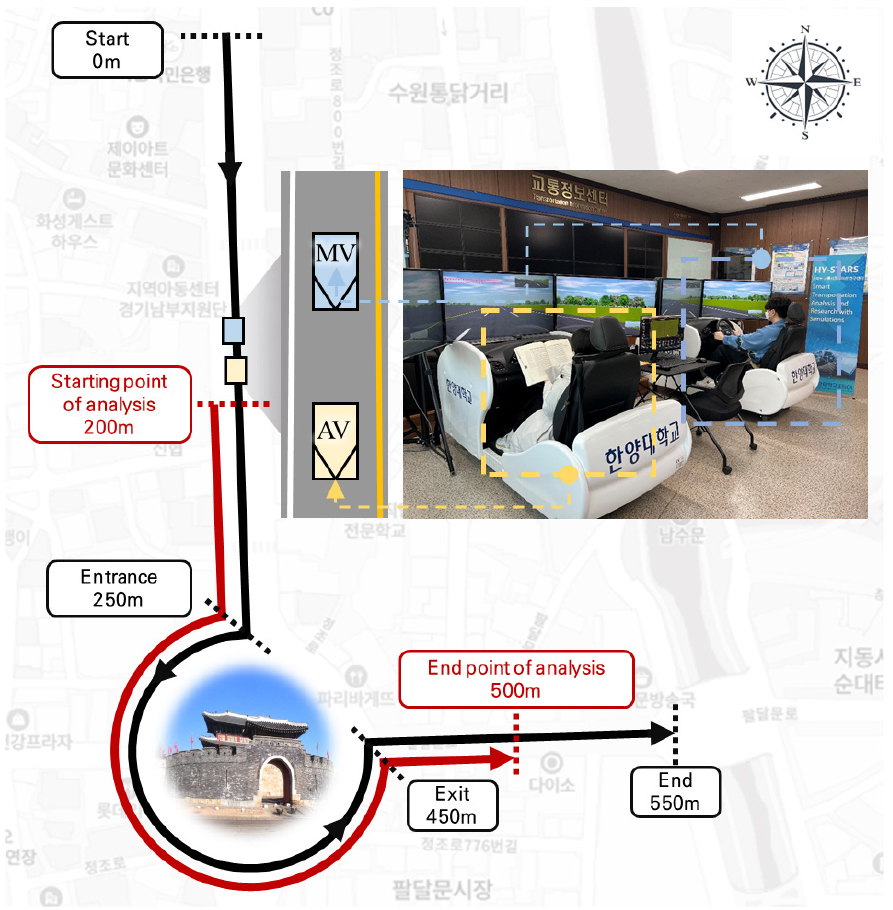
주행 실험 및 데이터 수집은 MADS를 통해 수행되었다. MADS는 차량 간 상호작용 기반 주행행태 및 주행 안전성을 분석할 수 있도록 다수의 주행 시뮬레이션을 실시간 연동한 장비로 개별 차량 데이터수집이 가능하다. 본 연구에서는 선행 차량인 자율차를 추종하는 후행 비자율차의 데이터를 수집하였다. 데이터셋은 속도, 가속도 등 44개의 지표로 구성되며, 운전경력 1년 이상의 피실험자 30인의 실험을 통해 도출된 30개의 데이터셋을 수집하였다. 수집된 데이터는 50m 단위구간별 횡방향 안전성 평가지표를 도출하는데 활용되었다. 수집된 데이터 셋에 대해 오픈소스 통계프로그램인 R studio를 활용한 전처리 과정을 수행했다. 0.1초의 시간 단위로 수집된 원시 데이터를 1m 단위의 주행 거리 기준 데이터로 변환하였다. 주행 거리 별 평균 속도 ±3*(표준편차)를 기준으로 이를 초과한 이상치를 제거하였으며, 제거된 값은 선형보간법을 통해 보간되었다. 선형보간법이란 두 점 사이에 위치한 미상의 값을 추정하기 위해 직선거리에 따라 선형적으로 계산하는 방법으로 대부분의 연구에서 사용되는 결측치 보간법이다.
4. 평가 방법론 개발
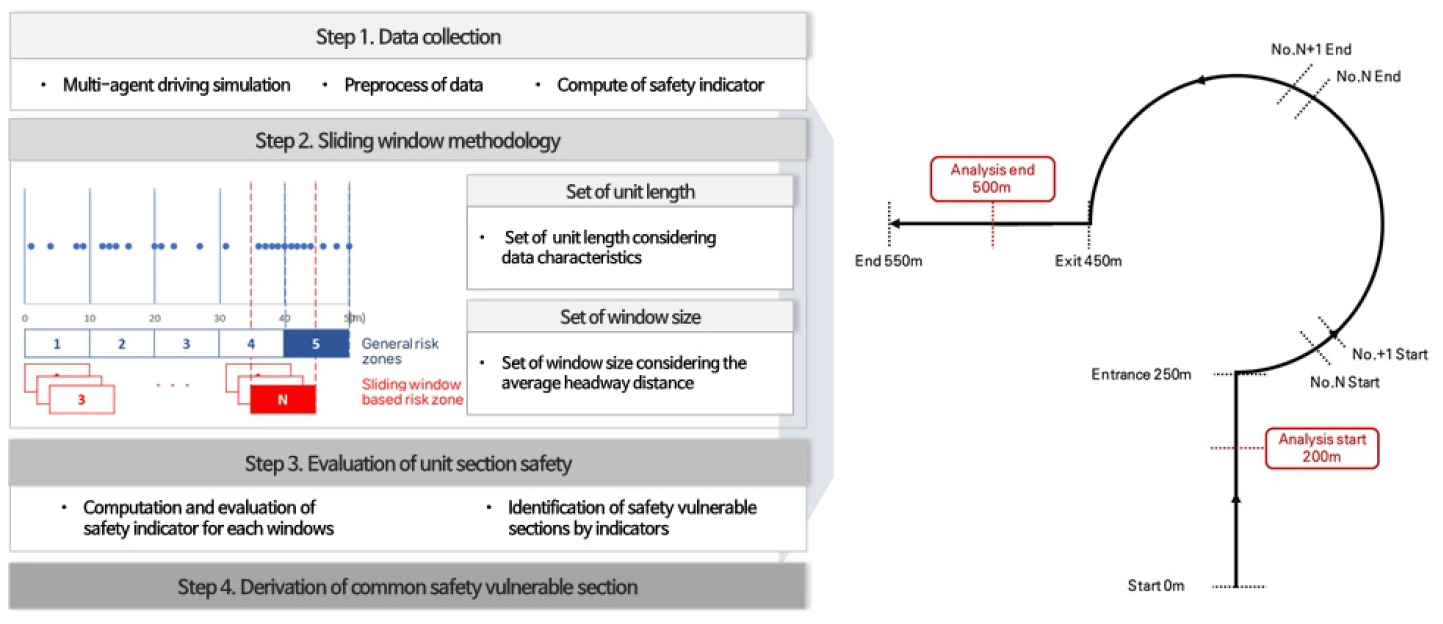
본 연구에서는 슬라이딩 윈도우 기반의 단위 구간별 횡방향 안전성 평가지표를 산출하였다. 산출된 단위 구간별 횡방향 안전성 분석결과는 회전교차로 내 안전성 취약 구간을 식별하는데 활용하였다. 선행 연구에서 제시된 각 안전성 평가지표별 임계값이 존재하지만, 주행 시뮬레이션의 특성상 주변 교통류, 노면 마찰력 등 주행에 영향을 미치는 요소들이 배제되어 해당 임계값을 직접적으로 적용하는 것은 한계가 있을 것으로 판단하였다. 따라서, 본 연구에서는 단위 구간 간 안전성 평가지표 결과의 비교를 통하여 가장 안전성이 취약하다고 판단되는 구간을 도출하였다. 슬라이딩 윈도우 기법이란, 구간 혹은 간격을 의미하는 윈도우를 설정하고 일정한 윈도우를 겹쳐가며 특정 구간을 도출하는 방법으로 사고 다발 구간 선정 등에 사용되는 기법이다. 임의의 간격으로 구분하여 위험 구간을 도출하는 방법에 비해 슬라이딩 윈도우 기법 적용 시 주행 안전성이 가장 낮은 구간 식별이 가능하다. 본 연구에서 개발된 슬라이딩 윈도우 기반 평가 방법론은 Figure 4와 같이 4가지 단계로 구분된다. 첫 번째 단계에서는 MADS 기반 시뮬레이션 수행을 통해 데이터를 수집하고 전처리 과정을 거쳐 속도, 가·감속도, 차간거리의 평균, 최대·최소값 등 기초통계량을 산출한다. 두 번째 단계에서는 슬라이딩 윈도우 기법을 적용한다. 최적 윈도우 길이는 차량간 상호작용을 고려하기 위하여 평균 차간거리 이상의 임의의 값을 선정하며, 슬라이딩 크기는 수집된 데이터의 특성을 고려하여 설정한다. 또한, 슬라이딩 윈도우 기법을 적용을 위하여 설정된 최적 윈도우 길이 및 슬라이딩 크기로 분석구간을 윈도우 단위로 구분한다. 본 연구의 분석구간은 시뮬레이션 네트워크 200m 지점에서 시작되므로 윈도우 No.1은 200m-200+Dm 구간이며, 윈도우 No.N은 200+(N-1)m-200+(N-1)+Dm 구간이다. 이때, D는 단위 구간을 의미한다. 세 번째 단계에서는 구분된 윈도우에 따라 안전성 평가지표를 계산하고 안전성을 평가한다. 각 평가지표 분석 결과 안전성이 가장 취약한 구간, 윈도우를 도출한다. 마지막으로 평가지표별 안전성 취약 구간을 종합하여 공통적으로 안전성이 취약한 구간을 도출한다.
평가지표는 선행 연구 고찰을 통해 선정된 횡방향 가속도 표준편차, 조향각속도 표준편차, Lane position 표준편차를 활용하였다. 횡방향 가속도 표준편차란 차량이 선회운동을 하는 경우 횡방향 움직임에 의한 가속도의 평균으로부터 벗어난 정도를 의미하며, 횡방향 가속도 표준편차가 증가할수록 안전성이 낮음을 의미한다(Choudhari and Maji, 2019; Liu et al., 2021). 횡방향 가속도 표준편차에 대한 산출식은 Equation 1에 제시하였다.
여기서, : 운전자 i의 횡방향 가속도 표준편차(m/s2)
: 위치 n에서 운전자 i의 횡방향 가속도(m/s2)
: 운전자 i의 횡방향 가속도 평균(m/s2)
: 운전자
: 분석구간()
: 분석구간의 연장(m)
: 분석구간 내 차량의 위치(n=0m, 1m, 2m, 3m…)
조향각속도의 표준편차는 조향각이 급격하게 변화하는 정도를 나타내며, 값이 증가할수록 안전성이 낮음을 의미한다. 조향각의 급격한 변화로 과격한 주행임을 알 수 있으며, 이로 인해 주행 안전성이 떨어짐을 나타낼 수 있다(Rossi et al., 2011; Lee et al., 2018b; Cui et al., 2021). 조향각속도에 절대값을 취하여 표준편차를 도출하였으며, 산출식은 Equation 2에 제시하였다.
여기서, : 운전자 i의 조향각속도 표준편차(m/s)
: 위치 n에서 운전자의 조향각속도 절대값(m/s)
: 운전자의 평균 조향각속도 절대값(m/s)
: 운전자
: 분석구간의 연장(m)
: 분석구간 내 차량의 위치(n=0m, 1m, 2m, 3m…)
Lane position은 차로 중심선과 차량 중심선 사이의 간격을 의미하며, Lane position 표준편차가 증가할수록 차량이 차로 중심선에서 멀어지는 안전성이 낮은 상황을 나타낸다(Sohrabi et al., 2023; Wang et al., 2019; Liu et al., 2016). 산출식은 Equation 3에 제시하였다.
여기서, : 운전자 i의 Lane position 표준편차(m)
: 위치 n에서 운전자의 Lane position 절대값(m)
: 운전자의 평균 Lane position 절대값(m)
: 운전자
: 분석구간의 연장(m)
: 분석구간 내 차량의 위치(n=0m, 1m, 2m, 3m…)
분석 결과
1. 기초통계량 및 주행속도 프로파일
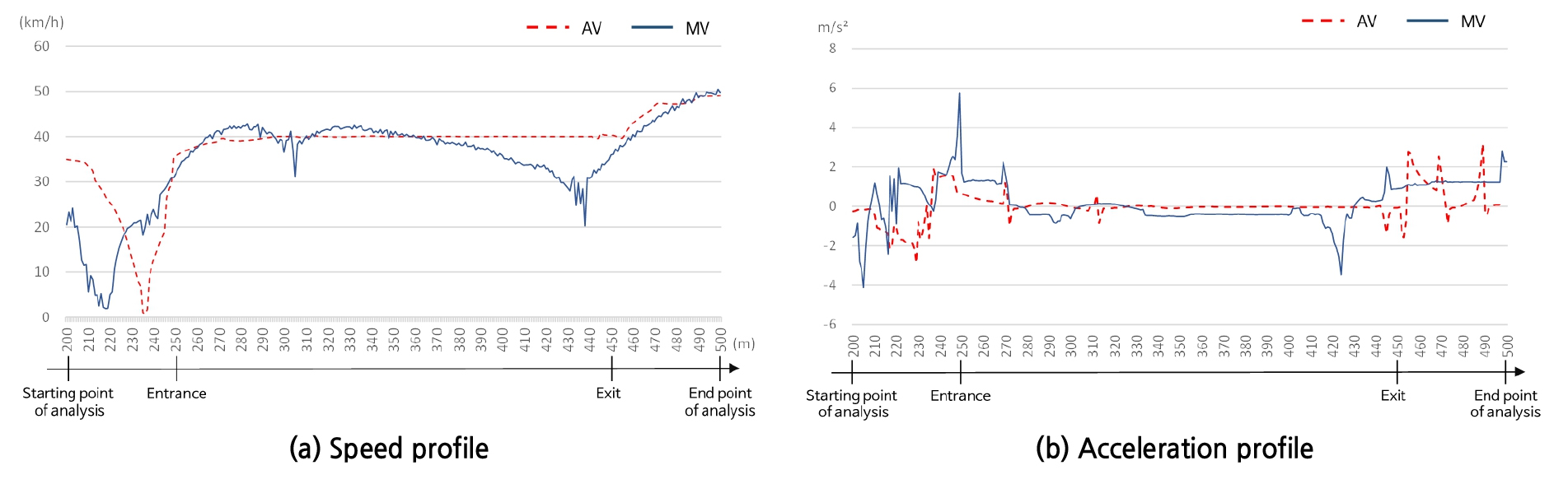
자율차 및 비자율차의 시뮬레이션 구현 및 주행행태를 분석하기 위하여 속도, 가·감속도 및 차간거리의 기초통계량과 프로파일을 도출하였다. 비자율차의 기초통계량 및 속도 프로파일은 30번의 실험 결과의 평균값을 산출하였으며 가속도 프로파일은 30번 실험의 개별 프로파일을 도출하였다. 자율차의 경우 선행 차량이며 사전에 설정된 알고리즘에 의해 주행되므로 30번의 실험에서 일정한 주행행태를 나타내었다. 도출된 기초통계량 및 프로파일은 각각 Table 1과 Figure 5에 제시하였으며, 가속도 프로파일은 30개의 프로파일 중 하나의 예시를 제시하였다. 자율차의 가속도 평균은 0.819m/s2, 표준편차는 0.152m/s2으로 비자율차의 가속도 평균 1.259m/s2, 표준편차 0.164m/s2에 비해 낮은 값이 도출되었으며, 자율차 감속도 평균은 -0.547m/s2, 표준편차는 1.027m/s2으로 비자율차의 감속도 평균 –1.057m/s2, 표준편차 1.424m/s2에 비해 낮은 값이 도출되었다. 속도 프로파일 및 가속도 프로파일 도출 결과 비자율차에 비해 자율차의 프로파일이 일정한 형태로 나타났다. 이는, 자율차가 비자율차에 비해 일정하고 안정하게 주행함을 의미하며 앞서 정립한 자율차의 요구조건이 시뮬레이션 상에 잘 구현되었음을 나타낸다.
Table 1.
Descriptive statistics of driving behavior
2. 슬라이딩 윈도우 기반 단위 구간 평가
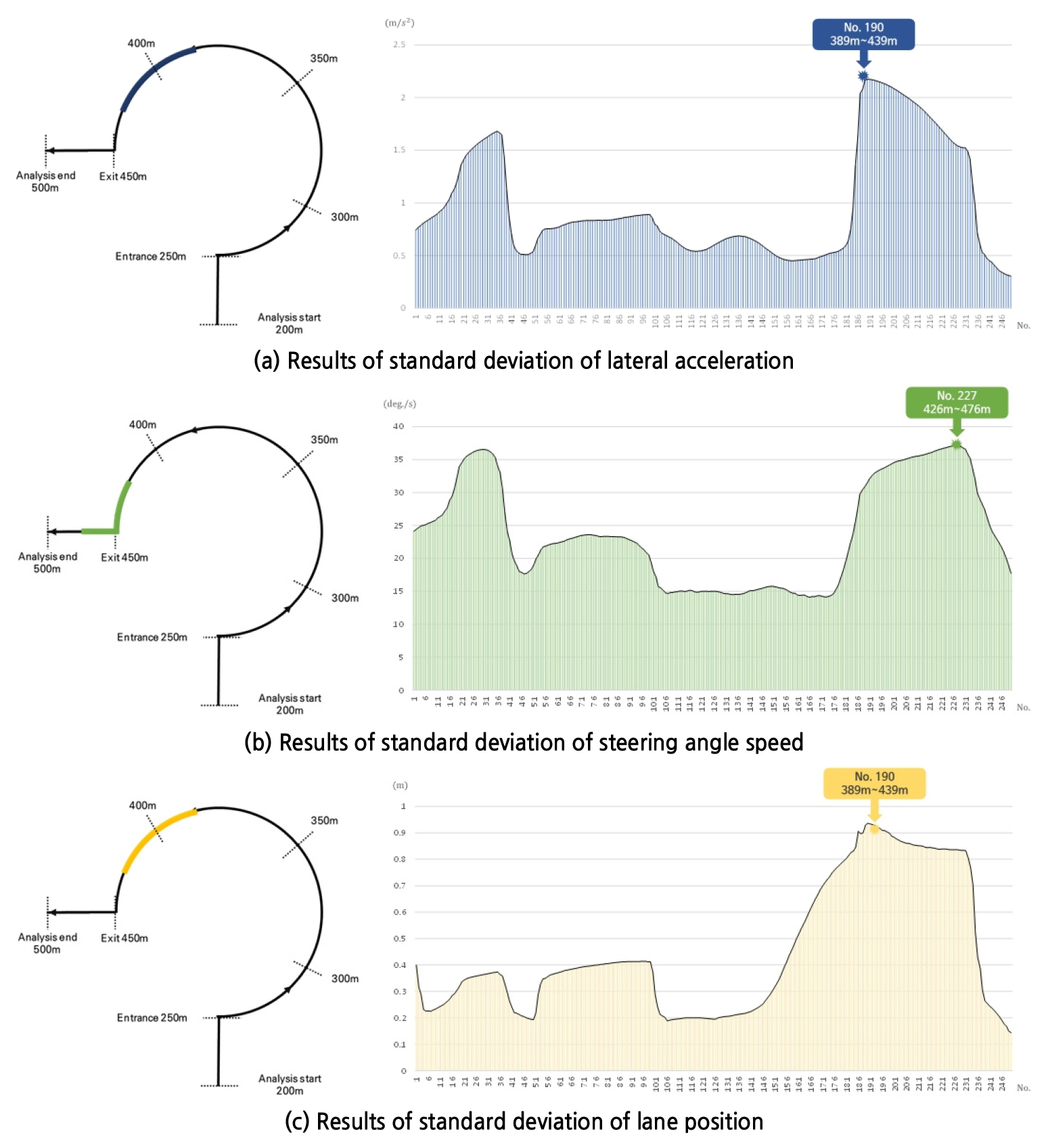
안전성 취약 구간 도출을 위하여 횡방향 가속도 표준편차, 조향각속도 표준편차 및 Lane position 표준편차에 대한 슬라이딩 윈도우 기반 단위 구간 평가를 수행하였다. 윈도우 길이는 평균 차간간격 39.169m를 반영하여 50m로 설정하였으며, SCANeR에서 1m 단위의 데이터가 수집되는 점을 고려하여 슬라이딩 크기는 1m로 설정하였다. 횡방향 가속도 표준편차 분석 결과 윈도우 No.190인 389m-439m 구간에서, 조향각속도 표준편차 분석 결과 윈도우 No.227인 426m-476m 구간에서, Lane position 표준편차 분석 결과 No.190인 389m-439m 구간에서 가장 큰 값이 도출되었다. 각 평가지표별 진입부 No.26 225-275m, 회전구간 No.126 325m-375m, 진출부 No.226 425-475m 및 표준편차가 가장 높은 위험 구간에 대한 평가 결과를 Table 2, Table 3 및 Figure 6에 정리하였다. 분석 결과 세 가지 평가지표에서 공통적으로 회전교차로의 진출부에서 안전성이 낮게 도출됨을 확인할 수 있다. 횡방향 가속도 표준편차 및 Lane position 표준편차 분석 결과 안전성이 가장 낮게 도출된 구간인 No.190 389m-439m 구간은 진출부 450m 지점의 11m-61m 이전 구간이다. 평균 차간거리 약 39m를 고려하였을 때 비자율차가 선행차량인 자율차의 진출을 인지한 후 진출을 위해 의사결정을 내리는 구간으로 판단된다. 조향각속도 표준편차 분석 결과 안전성이 가장 낮게 도출된 구간인 No.227 426m-476m 구간은 비자율차가 회전교차로 회전구간에서 좌회전 후 진출부에서 우회전하는 구간으로 급격한 조향 변화가 요구되는 구간이다.
Table 2.
Results of safety vulnerable sections based on sliding window
| Measure | Safety vulnerable sections | |
| Start (m) | End (m) | |
| Lateral acceleration std. | 389 | 439 |
| Steering wheel speed std. | 426 | 476 |
| Lane position std. | 389 | 439 |
Table 3.
Results of unit sections based on sliding window
3. 공통 안전성 취약 구간 도출
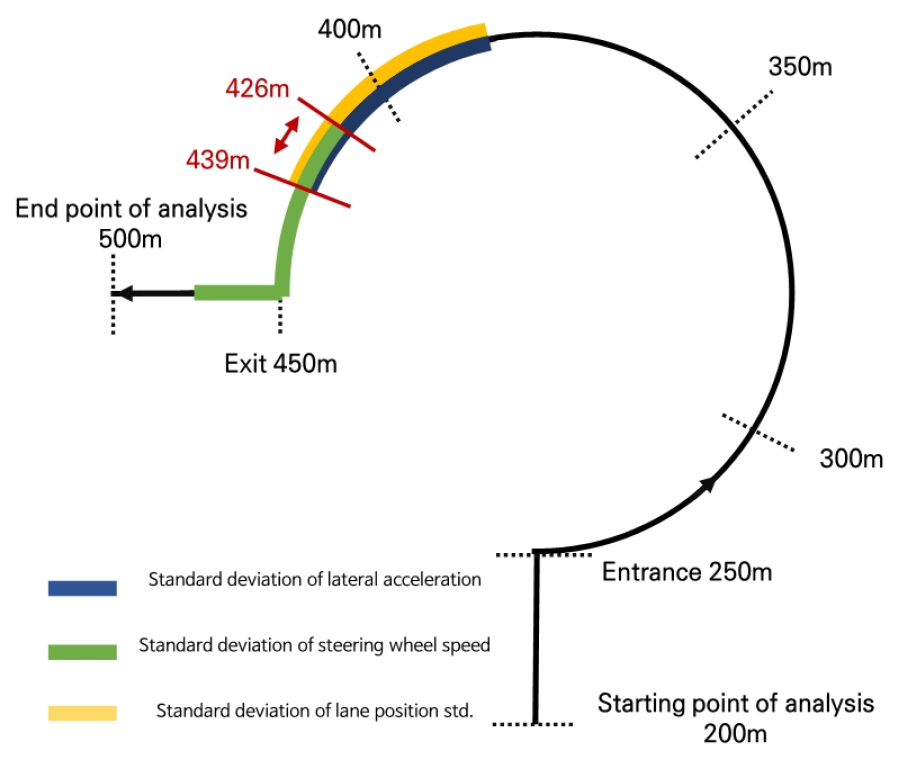
평가지표별 슬라이딩 윈도우 기반 단위 구간 평가 결과를 종합하여 공통적으로 안전성이 취약한 구간을 분석하였다. 분석 결과 횡방향 가속도 표준편차, 조향각속도 표준편차 및 Lane position 표준편차 분석 결과로 도출된 구간인 No.190 389m-439m 구간과 No.227 426m-476m 구간의 공통 구간인 426m-439m 구간이 공통 안전성 취약 구간으로 도출되었다. 분석 결과는 Table 4와 Figure 7에 정리하였다.
결론
본 연구는 차량 주행 행태를 반영하지 못하며 과거 사고 이력 자료를 통해 안전성 평가 및 취약 구간을 도출하는 기존 방법론과 달리 자율차를 추종하는 비자율차 주행 행태를 반영할 수 있는 회전교차로 안전성 평가 방법론을 개발하는 것을 목적으로 하였다. 주행 시뮬레이션 SCANeRTM의 모듈을 이용하여 시뮬레이션 상에 자율차를 구현하였으며 실제 회전교차로를 기반으로 한 가상의 네트워크를 구현하여 시뮬레이션 환경을 구축하였다. 후행 비자율차의 시뮬레이션 데이터를 수집하였으며, R studio를 통해 전처리 과정을 거쳐 데이터셋을 구축하였다. 자율차와 비자율차의 시뮬레이션 구현 및 주행행태를 분석하기 위하여 속도, 가·감속도 및 차간거리의 기초통계량과 프로파일을 도출하였다. 또한, 안전성 취약 구간을 도출하기 위하여 슬라이딩 윈도우 기반의 단위 구간 평가를 수행하였으며, 평가지표는 횡방향 가속도 표준편차, 조향각속도 표준편차 및 Lane position 표준편차를 선정하였다. 최종적으로 세 가지 평가지표의 공통 안전성 취약 구간을 분석하여 회전교차로 안전성 취약 구간을 도출하였다. 기초통계량 분석 결과 자율차는 비자율차에 비해 가·감속도 평균 및 표준편차가 낮았으며, 속도 및 가속도 프로파일 분석 결과 자율차는 일정한 주행 행태를 나타내어 자율차의 요구조건이 잘 구현됨을 확인할 수 있었다. 슬라이딩 윈도우 기반 단위 구간 평가 결과 횡방향 안전성 표준편차 및 Lane position 표준편차는 389m-439m 구간에서, 조향각속도 표준편차는 426m-476m 구간에서 가장 큰 값이 도출되었으며, 이를 종합하여 426m-439m 구간을 공통 안전성 취약 구간으로 도출하였다.
본 연구는 자율차 도입 시 비자율차의 주행행태에 따른 회전교차로 안전성 취약 구간을 도출할 수 있는 방법론을 제시한 점에 의의가 있으며, 제안된 방법론은 회전교차로 안전성 향상을 위한 대안 마련, 변화하는 교통환경에 대한 안전성 평가 기법 개발 및 안전성 취약 구간 도출 등의 연구에 활용될 수 있다. 국토교통부는 회전교차로의 안전성 향상을 위하여 2022년 회전교차로 설계지침 개정안을 마련하였다. 개정된 회전교차로 설계지침(Ministry of Land, Infrastructure and Transport, 2022)에서는 진입 교차로 수, 회전부 설계속도 등 진입부 및 회전구간에 대한 설계기준을 제시하였으며, 본 연구 결과와 상이하게 진출부에 대한 설계기준 정립 및 개선점은 언급되지 않았다. 본 연구에서 제시된 방법론 및 결과를 기반으로 현재의 개별 회전교차로 안전성 취약 구간을 식별하고 이에 대해 PT bar, 갈매기 표지 등의 안전 시설물 설치 시 안전성이 향상될 것으로 예상된다. 또한, 향후 자율차 상용화 시 인프라 가이던스 기반의 선제적 교통정보제공을 통해 혼합교통류 환경에서 비자율차의 안전성을 향상시킬 수 있을 것으로 기대된다.
향후 연구과제는 크게 세 가지를 제시한다. 첫째, 차량 추종 시나리오 개선, 교통류 관점에서의 분석 및 다양한 평가지표 활용 등이 고려될 필요성이 있다. 자율차를 추종하는 비자율차에 대한 분석 결과는 혼합교통류의 환경을 대변할 수 없는 한계점을 보완하기 위하여 AV-AV-MV pair 혹은 MV-AV pair 등 다양한 추종 시나리오를 통해 혼합교통류 환경을 보다 현실적으로 반영한 연구가 필요하다. 또한, 회전교차로는 진입과 진출이 여러 구간에서 발생하고, 차량 추종 상황 외의 여러 상황이 복합적으로 작용하며, 차량별 진·출입 경로도 다양하기 때문에 현재 시나리오를 통해 실제 회전교차로의 안전성을 평가하는 것을 한계가 있다. 이를 보완하기 위하여 MADS 실험을 통해 도출된 차량 주행행태를 반영한 교통류 관점의 혼합교통류 회전교차로 안전성 평가 과정을 추가하여 평가 방법론을 개선할 필요가 있다. 둘째, 본 연구에서는 회전교차로와 로터리를 구분하지 않고 회전교차로 하나의 교차로 형식으로 고려하였다. 실험 시나리오는 차량이 회전교차로 진입 전 정지선에서 정지 후 회전교차로를 진입하며, 자율차와 피실험자 차량 외 주변 교통류는 고려하지 않았다. 따라서, 회전 차량에 통행 우선권을 부여하는 회전교차로와 진입 차량에 우선권을 부여하는 로터리의 특성은 분석 결과에 크게 영향을 미치지 않을 것으로 판단된다. 그러나, 회전교차로는 2차로 이하의 소/중규모 교차로에 설치되고 로터리는 3차로 이상의 대형 교차로에 설치되는 등 기하 구조적 차이를 고려하지 못한 한계점이 존재한다. 따라서, 다양한 교차로 기하구조 및 운영 특성, 교통 조건 등 다양한 회전교차로와 로터리 간의 차이를 유의하여 도로 취약 구간을 도출할 필요가 있다고 판단된다. 마지막으로, 본 연구에서는 횡방향 안전성 평가지표를 활용한 평가 방법론을 개발했지만, 이는 운전자 주행행태를 평가하기에 한계가 있다. 따라서, 종방향 및 차량간 상호작용 안전성 평가지표를 활용하여 평가 방법론을 개선할 필요가 있다.
