

서론
기존문헌 고찰
1. 자율주행차 안전성 평가
2. EEG 기반 휴먼팩터(심리·생리 반응) 분석
3. 차량–보행자 상호작용
방법론
1. Driving simulation 실험 환경 구축
2. 상호작용 분석 기법 개발
3. 휴먼팩터를 고려한 PET 임계값 도출
분석결과
1. AVD 분석 결과
2. ANI-PET 분석 결과
결론
서론
자율주행차(Autonomous Vehicles, AVs)는 교통안전·효율·접근성 제고를 선도할 차세대 모빌리티로 주목받고 있으며, 표준화된 자동화 단계(레벨 0–5) 체계가 기술 성숙과 평가의 표준으로 자리 잡고 있다(SAE International, 2021). 완전 자율화까지는 상당 기간 혼재교통(mixed traffic) 이 지속될 것으로 전망되며, 이에 따라 AVs는 도로이용자(보행자·비자율주행차)와의 상호작용을 안전하게 관리하는 정책·인프라 준비가 요구된다(NHTSA, 2017; ITF, 2023). 이러한 흐름은 운행 설계 영역(Operational Design Domains, ODDs) 개념이 포함된 SAE J3016의 정의와 미국 교통당국의 Autonomous Driving System(ADS) 안전 비전, 경제협력개발기구(Organisation for Economic Co-operation and Development, OECD), 국제교통포럼(International Transport Forum, ITF)의 인프라 준비 보고서 등에서 일관되게 보고되고 있다(SAE International, 2021; NHTSA, 2017; ITF, 2023).
AVs와 기존 도로 이용자간의 안전한 상호작용을 위해 다양한 ODDs에서의 위험성을 평가하고 안전하게 관리하는 연구가 진행중이다. 혼재상황에서 교차로·횡단부는 상호작용이 집중되는 대표적 ODDs로서 위험이 특히 높은 것으로 나타났으며, 캘리포니아 등 실증자료 분석에 따르면 AVs 충돌은 교차로 집중 경향이 뚜렷하고, 후미추돌(rear-end) 사례가 빈번하게 보고된다(Pokorny and Hurni, 2022; Lee et al., 2023). 이러한 결과는 교차로·횡단부 상호작용의 정밀한 위험관리가 AVs 신뢰성 제고의 선결 과제임을 시사한다. 또한, 교차로·횡단부 특성상 교통약자(Vulnerable Road Users, VRUs)와의 상호작용이 빈번하게 발생한다는 특징이 있다. 특히 교통약자 중 보행자는 차체 보호가 전무한 대표적 교통약자로, 전 세계 도로 사고 사상자의 약 23%를 차지하며, 청소년·청년층의 주요 사망 요인과도 맞물려 공중보건 관점에서 핵심 과제로 지목된다(WHO, 2023). WHO 「Global Status Report on Road Safety 2023」는 2021년 연간 도로 사고 사상자를 119만 명으로 추정하고, 보행자·자전거·이륜차 이용자의 구조적 취약성을 강조하고 있다(WHO, 2023). 이는 불안정한 AVs 과도기 시대의 안전 정책에서 보행자 상호작용을 최우선 고려대상으로 삼아야 함을 시사한다.
AVs와 보행자의 상호작용은 일반적인 차대차 상호작용에 비해 암묵적 소통(시선·제스처·감속 신호)에 크게 의존한다는 특징이 있다. ADS는 보행자 보호를 위해 보수적 회피·양보 거동을 수행할 수 있으나, 이러한 급감속·궤적 변화는 AV 탑승자에게 불안감을 유발하고 전두 알파 비대칭, 각성 관련 심리 생리적 지표 변화를 야기한다(Beggiato et al., 2019). 심리생리적 작업부하는 지각–판단–조작 전 과정에 걸쳐 행동을 매개하며, 주행 맥락에서 뇌파(Electroencephalogram, EEG) 스펙트럼 중 알파·베타 대역 및 비율은 이러한 변화를 민감하게 반영하는 평가지표로 활용되고 있다(Di Flumeri et al., 2018; Wang et al., 2018; Ma et al., 2024).
이러한 배경에서 본 연구는 보행자와의 상호작용을 주요 도로이용자로 선정하여, AV 탑승자와 보행자간 상호작용 분석기법을 개발하고 적용 방안을 제시하였다. 본 연구는 AV 탑승자의 휴먼팩터를 고려하기 위해 불안감이 유의하게 상승하는 post-encroachment time(PET) 구간을 규명하는 것을 목적으로 한다. 이는 교차로·횡단부 등 ODD 핵심 상황에서 시간 여유와 휴먼 팩터간의 연계를 밝혀, 혼재교통 환경의 안전·수용성 향상을 위한 경험적 근거를 모색하고자 한다. 본 논문의 구성은 다음과 같다. 제2장에서는 EEG 기반 심리생리적 작업부하 분석, 보행자-차량 상호작용 평가에 관한 선행연구를 정리한다. 제3장에서는 실험설계와 분석방법을 제시하고, 제4장에서는 AVs-보행자 상호작용 분석기법을 통해 도출된 분석결과를 서술한다. 마지막으로 제5장에서는 결론과 시사점 및 향후 연구에 대해 논의한다.
기존문헌 고찰
본 연구는 주행 시뮬레이션(Driving Simulation, DS)과 뇌파를 활용하여 도심내 보행자와 상호작용이 발생할 수 있는 ODD를 대상으로 AVs-보행자 상호작용 시 AV 탑승자의 휴먼팩터를 고려한 AV의 거동 요구사항 도출을 목적으로 수행하였다. 따라서, 자율주행차의 안전성 평가 측면의 연구를 검토하고 EEG 기반 휴먼팩터(심리·생리 반응) 분석과 차량–보행자 상호작용에 대해 분석한 기존 문헌을 고찰함으로써 본 연구의 차별점과 시사점을 제시하였다.
1. 자율주행차 안전성 평가
자율주행차의 안전성 평가 측면의 연구는 실도로 주행 데이터를 활용한 거동 패턴 분석, surrogate safety 지표에 기반한 상충 위험 정량화, 그리고 시스템 데이터로 보는 성능·신뢰성 진단이 서로 보완적으로 결합되어 AVs 안전성 평가가 고도화되는 추세다. Seo et al.(2025)는 실제 주행 데이터에서 속도·가감속·차로변경을 패턴 단위로 추출해 이상 주행행태와 위험 구간을 자동 식별하는 프레임워크를 제시하였으며, 동일 구역이라도 교통흐름, 기하구조, 주행행태에 따라 위험 패턴이 달라짐을 보였다. Lee et al.(2024)는 도시부 실도로에서 모니터링 지표 체계를 구성해 위험도로 구간을 실증 추출하고 현장 점검과의 일치도를 통해 지표의 현장 적합성을 확인했다. Lim et al.(2025)는 도로 유형·기하별 시나리오를 시뮬레이터로 재현하여 도로환경 적합도 평가 절차를 제안하고, 곡선부·교차로·협소부 등에서 AVs 반응 특성이 일관되게 달라지는 양상을 정량화해 시나리오 설계의 기준선을 제시했다. Bin-Nun et al.(2024)는 경미한 상충에서 중대 사고로 이어지는 과정을 정량적으로 입증하며 surrogate safety 지표의 이론적 정합성을 강화했다. Do et al.(2024)는 신호교차로 추종 상황에서 AVs의 짧은 차두시간 특성으로 인해 TTC와 PET 등 일부 전통 지표가 정상 거동을 과대위험으로 분류할 수 있음을 보이며 AVs 특화 지표와 임계값 재설계가 필요함을 제시하였다. Abdel-Aty and Ding(2024)은 대규모 실제 사고를 비교하여 전반적으로 AVs의 사고위험이 낮음을 보였으나 조도 변화나 좌·우회전과 같은 특정 조건에서는 상대적 취약성이 나타남을 제시했다.
2. EEG 기반 휴먼팩터(심리·생리 반응) 분석
교통 측면에서 주행에 따른 작업부하와 각성/피로를 EEG로 정량화하여 휴먼팩터를 고려하는 시도는 지속되어 왔다. 초기 연구들은 주행 피로·졸음 탐지를 중심으로 전두/두정 영역의 θ(4–7Hz) 증가와 α(8–12Hz) 감소가 주행 난이도 및 주의집중 증감과 일관되게 연동된다는 근거를 마련하였으며, 성분분석 등 신호처리로 실시간 운전상태 판별의 가능성을 제시했다(Lin et al., 2005; Zhao et al., 2012; Wascher et al., 2016). 이러한 연구 결과는 웨어러블 전극에서도 반복적으로 확인되었다(Wascher et al., 2019; Getzmann et al., 2021). 주행 난이도·주의 전환과 EEG 주파수 지표의 연계에 대한 연구도 진행되었다. 특히 α–θ 대역비(α/θ, θ/α)는 주관적 작업부하 분류에 유효한 특성으로 검증되었고, 주의 분할·방해 과제에서 전두 θ 증가·후두 α 감소 패턴이 반복 관찰되었다(Raufi and Longo, 2022; Wang et al., 2018; Di Flumeri et al., 2018). 다양한 주행환경에서 유사한 경향을 보고한 연구도 다수 진행되었으며, 이는 EEG 기반 작업부하 분류의 일반화 가능성을 방증한다(Ahn et al., 2016; Liu et al., 2023; Wascher, 2023; Getzmann et al., 2021).
자율주행 맥락에서 AV 탑승자의 반응에 주목한 연구도 수행되었다. 실도로 수준의 자율주행 탑승 실험에서 탑승자의 전두 α 비대칭과 각성 지표가 자동 및 수동 주행 조건에 따라 상이하게 나타났고, 개인 특성이 체감 신뢰·수용성과 연관되는 것으로 분석되었다(Palatinus et al., 2022). 또한 운전자의 자율차 신뢰도를 EEG로 추정하거나, 조건부 자동화 탑승 상황에서 정신적 피로가 심화되는 생리학적 단서의 증거도 축적 중이다(Zhang et al., 2024). 주행 환경 고유의 특성이 EEG에 노이즈와 스트레스 반응을 유발할 수 있어 실도로에 적용하기 위한 보정 및 해석 방법에 관한 논의도 수행되고 있다(Song et al., 2024). Jang et al.(2023)은 주행 시뮬레이션에서 도로 선형 조건별 주행 데이터를 수집하고, EEG 기반 작업부하 지식을 참조한 예측모형을 구성하여 도로선형별 안전성 평가로 연결함으로써, EEG 계측 없이 작업부하의 변화를 운전행태 신호로 추정할 수 있음을 보였다. 이러한 접근은 본 연구가 도출할 PET–EEG 연계 기반 불안 임계 영역을 실제 차량 제어·경고 로직에 내재화할 때, EEG 미계측 환경에서도 차량 동역학 신호로 작업부하 정도를 추정하여 현장 적용성을 높일 수 있다는 점에서 시사점을 제공한다.
3. 차량–보행자 상호작용
보행자와의 상호작용에서는 AVs가 양보 또는 회피를 위해 짧은 시간 내에 감속을 실행하는 경우가 잦다. 이때 가·감속도와 jerk 프로파일은 탑승자의 불안감을 크게 좌우한다. 최근 연구들은 승차감 불편이 차량 가속도·jerk의 함수로 체계적으로 증가하며, 종방향 평가지표의 파형에 따라서도 달라짐을 보였다(de Winkel et al., 2023; Genser et al., 2022). 예기치 않은 상황에서 자율주행 모드보다 수동운전 모드에서 승객의 불안 수준이 낮은 결과가 도출되었다(Palatinus et al., 2025).
한편, 보행자 접근 또는 횡단 상황에서의 보수적 감속은 후방 Manual Vehicles(MVs)의 추돌 위험을 높일 수 있고, 이는 MV 운전자 측의 인지부하·불안을 유발한다. 캘리포니아 데이터를 기술통계로 정리한 연구는 교차로에서 AVs가 정지/감속 후 후미추돌 당하는 패턴이 빈번하게 발생하고 있음을 제시하였다(Pokorny and Hurni, 2022). 이러한 맥락에서, 긴급 회피 단계에서 운전자의 EEG 대역(델타·세타·알파·베타) 활동이 유의하게 변화한다는 실험 결과와, 자율주행차가 탑승자의 주관적 부담을 낮추더라도 객관적 인지부하는 오히려 증가할 수 있다는 결과는 AV 탑승자의 EEG 기반 불안감 측정의 타당성을 뒷받침한다(Li et al., 2022; Stapel et al., 2019).
기존 연구는 보행자 안전성 지표와 사람의 생리반응을 분리하여 분석을 진행하였거나, 단일 주체만을 중점적으로 분석을 진행한 연구가 주를 이루었다. 대리안전지표 중 PET는 차량–보행자 상충의 시간 여유를 민감하게 포착해, 교차로 등 다양한 ODD에서 상충 심각도 분류·위험 분석에 사용되어 왔다(Ni et al., 2016; Zhang et al., 2020; Ankunda et al., 2024). 그러나 대부분의 연구는 사고 저감의 물리적 측면에 초점을 두어, 동일 공간 및 시간상에서 PET와 차량 탑승자의 불안감 신호를 동시 정합해 불안 임계 PET 구간을 제시한 연구는 미비했다. 이에 비해 본 연구는 AVs와 보행자의 상호작용 시나리오를 구체적으로 제시하였다는 점과 대리 안전 지표와 심리 생리적 작업부하 지표를 동일한 시간과 공간상에 정합하여 분석을 수행하였다는 점에서 기존 연구와 차별성을 가진다. 최근에는 비신호 횡단부에서 보행자의 안전과 교통 운영의 효율성 간 균형을 최적화하려는 AVs 거동 설계 연구가 나타나지만(Chen et al., 2025), AV 탑승자의 생체반응까지 포함한 다목적 설계 기준은 여전히 연구적 공백으로 남아 있다. 본 연구는 보행자와 AVs의 상호작용 시나리오에서 EEG 기반 불안감 상승이 유의하게 나타나는 PET 영역을 도출함으로써 기존 연구와 현실의 간극을 메우고 인간공학적 기준을 제시한다.
방법론
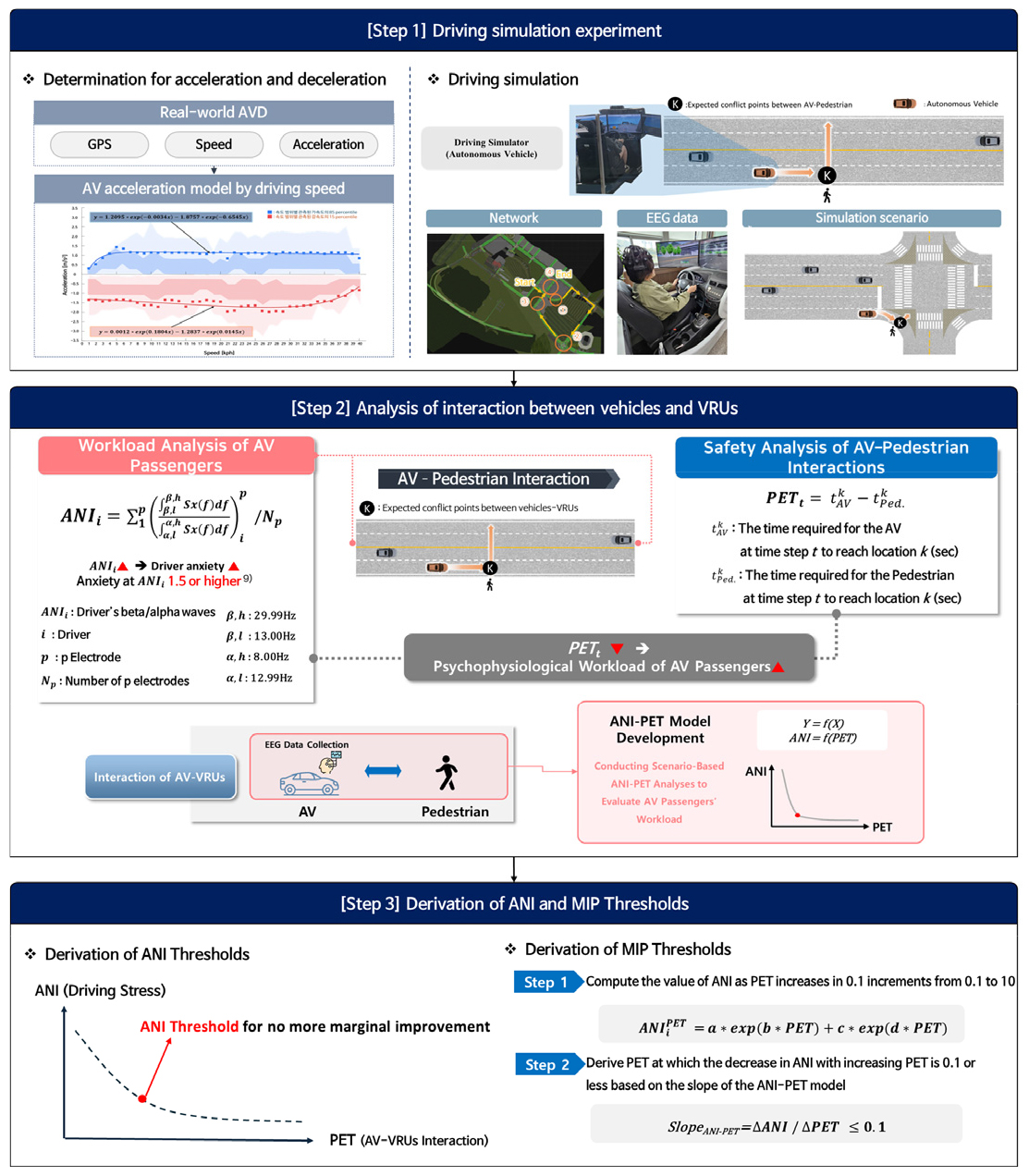
본 연구는 driving simulator를 활용하여 보행자의 상호작용 상황 자율차 탑승자의 휴먼팩터를 고려한 자율차 거동 요구사항을 도출하기 위해 총 3단계의 과정을 수행하였다. 전체적인 연구흐름도는 Figure 1에 제시하였다. Step 1에서는 실제 자율주행차 데이터를 활용하여 시뮬레이션 환경에서 자율차의 거동을 구현하고 시뮬레이션 환경에서 피실험자를 모집하고 실험을 수행하였다. 본 연구의 핵심에 해당하는 Step 2의 경우 자율차 탑승자를 대상으로 뇌파 수집 장비를 착용하고 뇌파를 수집하였으며, 불안감 및 스트레스 정도를 의미하는 anxiety & nervousness index(ANI)를 산출하였다. 또한 주행 시뮬레이션 자체적으로 수집되는 자율차의 주행 데이터, 보행자의 이동 궤적 데이터를 활용하여 PET를 산출함으로써 ANI-PET의 최적 함수식을 선정하였다. 마지막으로 도출한 함수식을 통해 불안감이 발생하지 않는 ANI 기반 PET 임계값과 PET 증가에 따른 유의미한 ANI 감소가 발생하지 않는 한계 개선지점을 도출하였다.
1. Driving simulation 실험 환경 구축
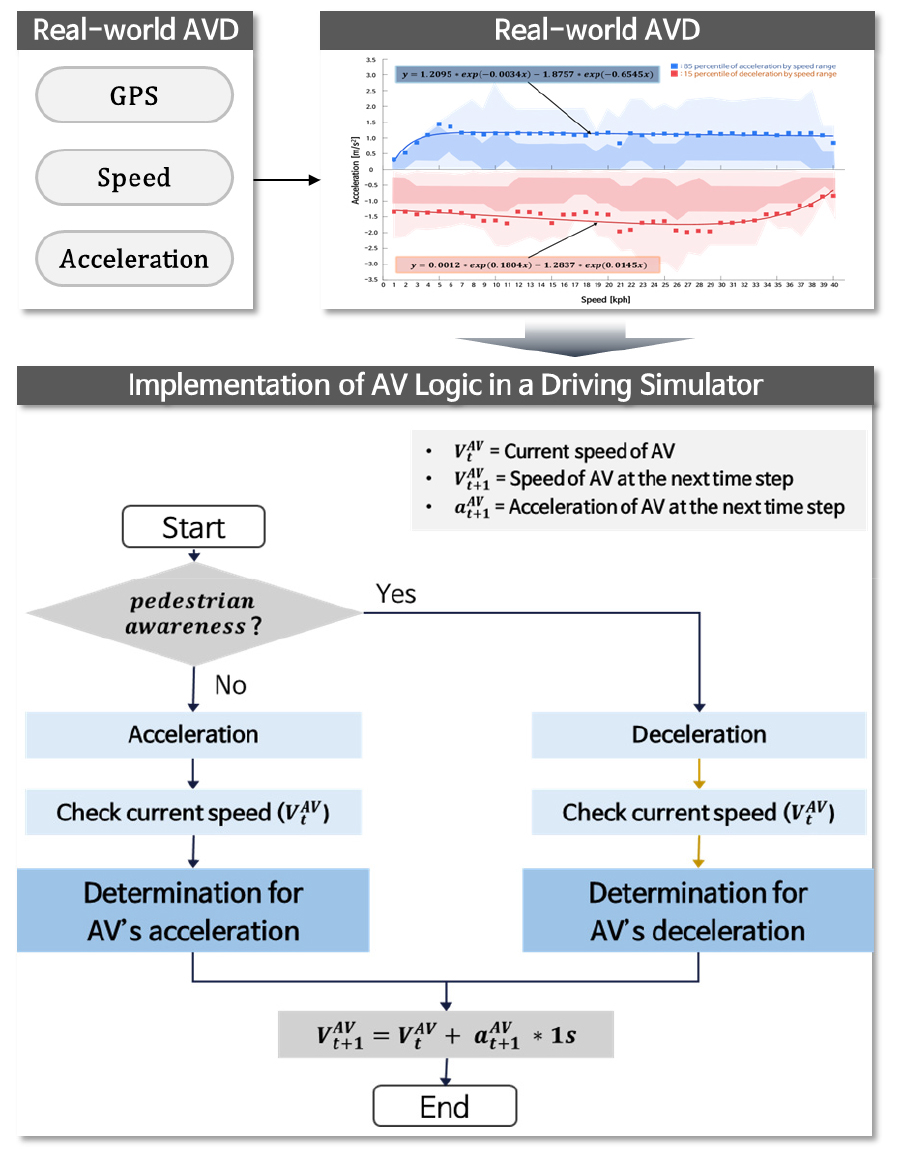
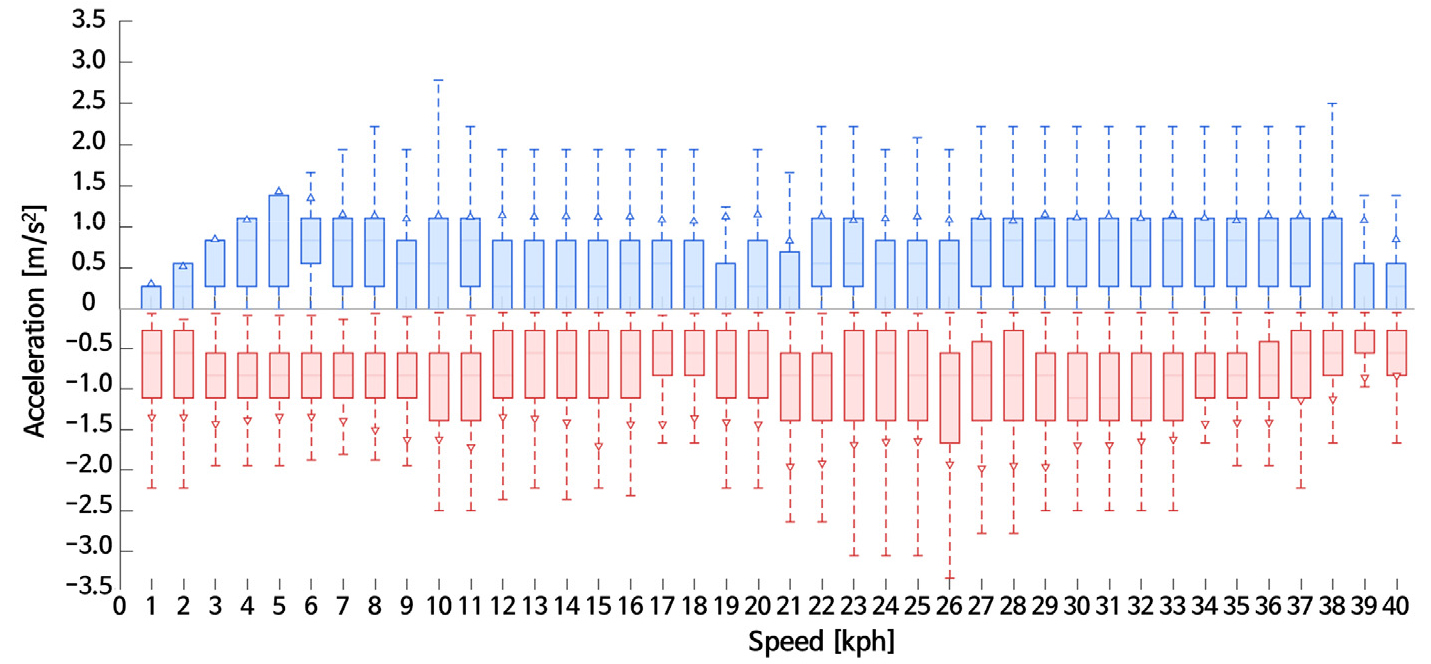
본 연구에서는 DS 환경에서 AVs의 거동구현을 위해 서울 상암 자율주행차 시범운행지구에서 주행하는 자율주행차의 거동 데이터인 Autonomous Vehicle Data(AVD)를 활용한 주행행태 분석결과를 활용하였다. AVD는 Table 1에 제시한 바와 같이 2022년 2월 10일부터 2022년 10월 31일 동안 총 5대의 AVs로부터 수집되었으며, 위치 좌표, 속도, 수집시간, 주행모드 등의 정보가 포함되어 있다. AVs의 주행행태 분석을 통해 속도에 따른 가속도의 분포와 감속도의 분포를 도출하였으며, 가속도의 85 percentile과 감속도의 15 percentile의 값을 활용하여 최적의 함수식을 도출하였다. 최적의 함수식을 DS 환경의 자율차 거동 로직에 반영하였다.
Table 1.
Characteristics of the AVD
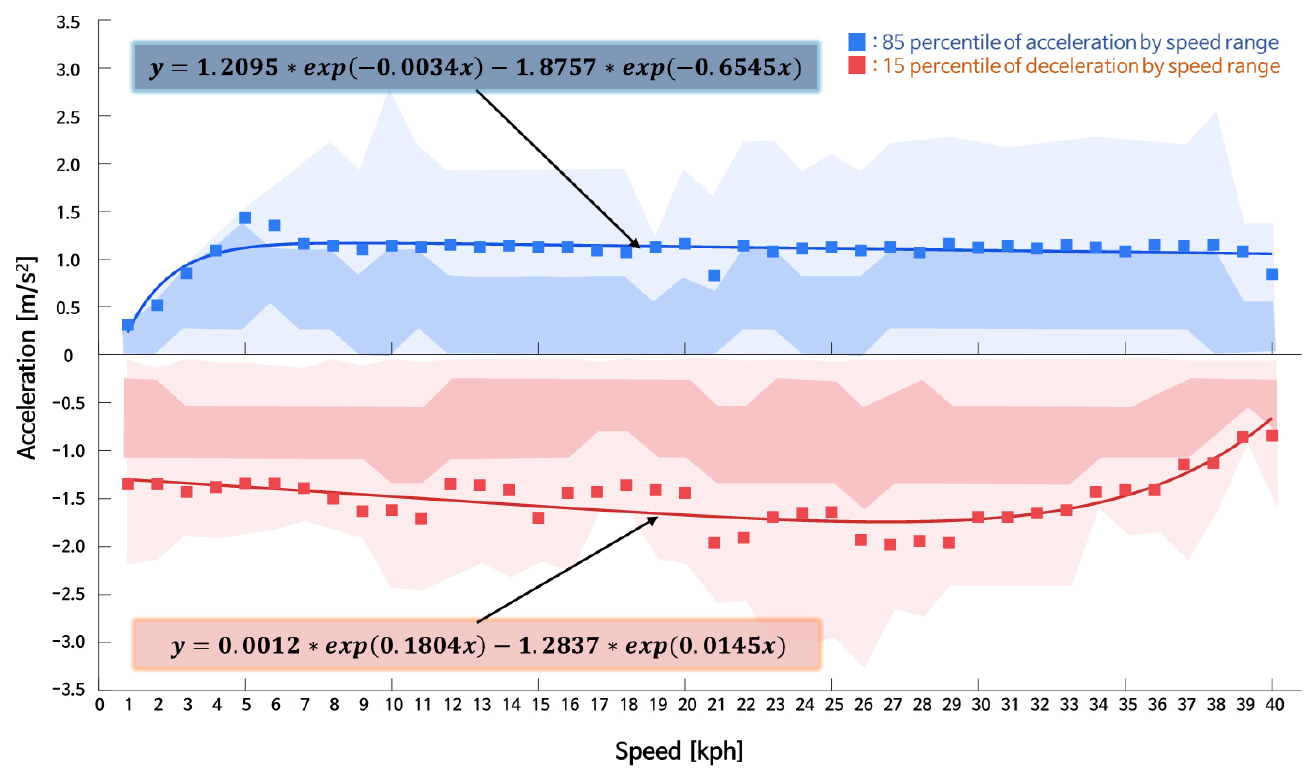
본 연구에서는 기존문헌 고찰을 통해 기존 AVs의 주행 알고리즘을 검토하고 AVD 주행행태 분석결과에 적용함으로써 DS 환경에 적용할 수 있는 AVs의 거동 제어 로직을 개발하였다(Jo et al., 2024; Jo and Oh, 2024). 기존문헌에서 제시한 자율차의 가감속 알고리즘의 경우 AVs의 차두시간이 목표 차두시간 내에 존재할 경우 선행차량의 속도와 비교하여 가속과 감속을 판단한다. 본 연구는 Figure 2와 같이 real-world AVD실험 데이터를 기반으로, 속도에 따른 AVs의 가속도 및 감속도 관계를 정량화하여 속도–가속도 모형을 도출하였다. 해당 모형은 단순한 의사결정 규칙이 아닌, Driving Simulation 환경에서 차량의 거동을 재현하기 위한 파라미터 도구로 활용되었다. 즉, 실도로에서 관측된 자율차 감속도의 15 percentile과 가속도의 85 percentile 기반의 가·감속 주행행태를 반영하여, 속도 영역별 허용 감속 경계와 기본 감속 프로파일을 DS 내 차량 거동 파라미터로 설정하였으며, 이를 통해 주행 시뮬레이션 실험 환경에서 주행 특성의 일관성과 재현성을 확보하였다. 또한, 무단횡단과 같은 돌발 상황에서는 별도의 급정지 규칙을 적용하여 감속 모델과 의사결정 로직을 분리함으로써, 자율차 제어 알고리즘의 안정적 비교가 가능하도록 하였다.
본 연구에서는 시뮬레이션 환경 구축이 가능한 SCANeR 소프트웨어 사용하여 Figure 3과 같이 도심부 도로에서 주간의 맑고 건조한 날씨를 환경조건으로 적용하여 실험을 진행하였으며, 시나리오별 AVs와 상호작용하는 보행자는 2~3명으로 구성하였다. 시나리오 선정은 캘리포니아 DMV의 자율차 관련 사고에서 반복적으로 확인되는 교차·회전·보행자 상호작용 구간, 도시부 혼합교통에서 자율차의 양보·정지 의사결정이 집중되는 환경, 상충예상지점이 명확하여 PET–ANI를 동시 분석하기 적합한 구조라는 기준으로 선정하였다. 캘리포니아 DMV의 자율주행차 충돌 보고는 교차로·회전 상황과 보행자 관련 상호작용이 빈번히 발생하는 도로 환경 및 기하 구조를 제공하며(California DMV, Autonomous Vehicle Collision Reports), 이러한 ODD는 횡단 보행자–차량 교차 경로와 회전 차량–보행자가 전형적 고위험 유형으로 규정되는 점과 부합한다(Liu et al., 2021). 더불어, 실제 사고의 매칭 사례–대조군 비교에서는 자율차가 전반적으로 낮은 위험을 보이더라도 회전 동작이나 조도 변화 등 특정 조건에서 상대적 취약성이 관찰되어, 교차로 우회전·교통섬 맥락의 우선적 평가 필요성을 뒷받침한다(Abdel-Aty and Ding, 2024). 이와 같은 자율주행차의 실제 사고 사례를 종합하여 본 연구는 무단횡단, 교통섬 횡단 보행자, mid-block 횡단 보행자를 대표 위험 시나리오로 설정하였다. 선정한 시나리오는 보행자와의 상호작용 시 AVs의 거동 계획에 핵심인 감속 및 정지의 거동이 요구되며, 동시에 탑승자의 불안/작업부하 변화를 유발한다(Rasouli and Tsotsos, 2019).
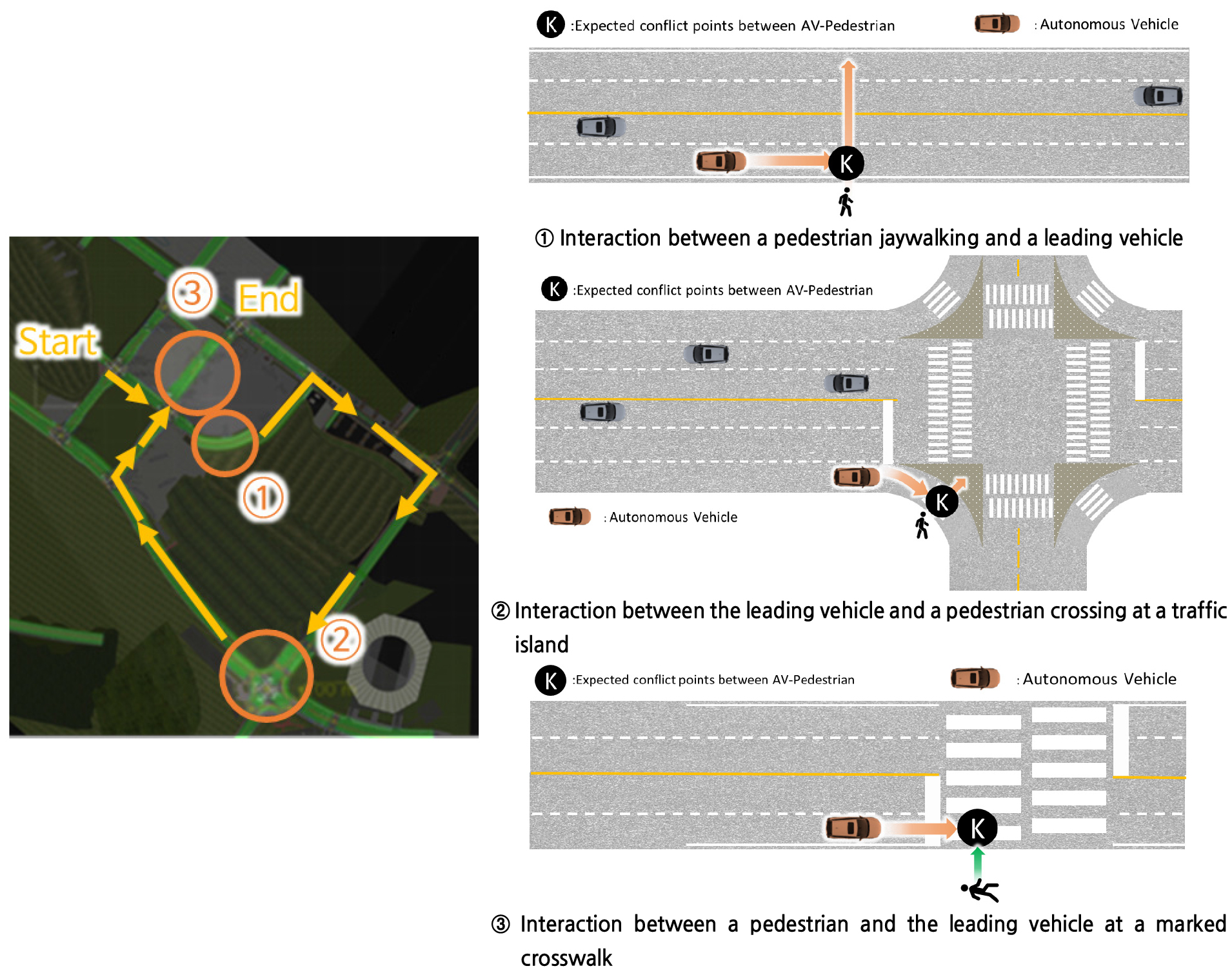
예측 불확실성이 큰 보행자의 무단횡단은 AVs와 MVs 모두에게 보행자 충돌위험 증가를 유발하며(Anik et al., 2021; Khuzam et al., 2025), 이는 AVs의 선제 감속/회피 전략과 인지부하 발생여부를 분석하기에 적합한 시나리오이다. 교통섬은 비신호 구간의 상호작용을 야기하고, 곡선 형태의 기하구조로 시거가 상대적으로 확보되지 않아 보행자 충돌 위험을 높일 수 있다(Jiang et al., 2020). 따라서 교통섬 횡단 시나리오는 보행자 보호와 더불어 탑승자 승차감과 안전성을 함께 고려하기에 적합한 ODD이다. 교차로 횡단 시나리오는 보행자-차량 상충이 집중되는 환경이며, 특히 PET가 상충 심각도와 근접위험을 민감하게 포착하는 것으로 확인된 상호작용 시나리오이다(Zhang et al., 2020; Ni et al., 2016). 본 연구는 이러한 장면에서 보행자와 차량의 데이터를 통해 산출한 PET에 따라 심리생리적 작업부하가 발생하는 정도를 분석하여 불안감이 유의하게 상승하는 PET 구간을 도출한다. 주행 시뮬레이션 실험을 수행하기 위해 실제 운전 경력이 1년 이상인 만 20세 이상 운전자를 대상으로 총 15명의 피실험자를 모집하였다. 주행 실험 네트워크는 서울 상암 자율주행차 시범운행지구에 위치한 무단횡단, 교통섬, 횡단보도를 통과하는 경로로 설정하였다. 네트워크 내 차량의 제한속도는 서울 상암 자율주행차 시범운행지구 실제 제한속도와 동일하게 50km/h로 설정하였다.
2. 상호작용 분석 기법 개발
본 연구에서는 Figure 4에 제시한 바와 같이 보행자와 상호작용하는 AVs에 대한 DS 실험을 수행하여 수집한 데이터를 활용하여 AV 탑승자가 보행자와 상호작용할 시 심리생리적 작업부하가 발생하지 않는 PET 구간을 도출하는 기법을 개발하였다. 뇌파(Electoencephalogram, EEG)는 뇌 내 신경 활동으로 발생하는 전기적 신호를 수집한 것으로 뇌전도라고도 한다. 뇌파는 심리적 상태, 의식 상태, 수면 장애 등을 판단할 수 있다. Table 2와 같이 뇌파는 주파수로 구분 가능하며, β파는 운전자의 불안감이나 스트레스를 평가하기 위해 다수 활용되었다(Zhao et al., 2012; Kim et al., 2013; Kang et al., 2019). 센서 기술의 발전에 따라 다수의 주행행태 연구에서 심리생리적 작업부하 평가를 위해 활용되고 있다(Lin et al., 2014; Haufe et al., 2014; Rahman et al., 2020). 따라서, 보행자와 차량의 상호작용 분석에 ANI와 PET의 관계식을 기반으로 휴먼팩터를 고려한 보행자-자율차 상호작용 분석기법을 개발하였다. PET의 경우 작을수록 사고 발생 가능성이 증가하는 것으로 판단할 수 있다.
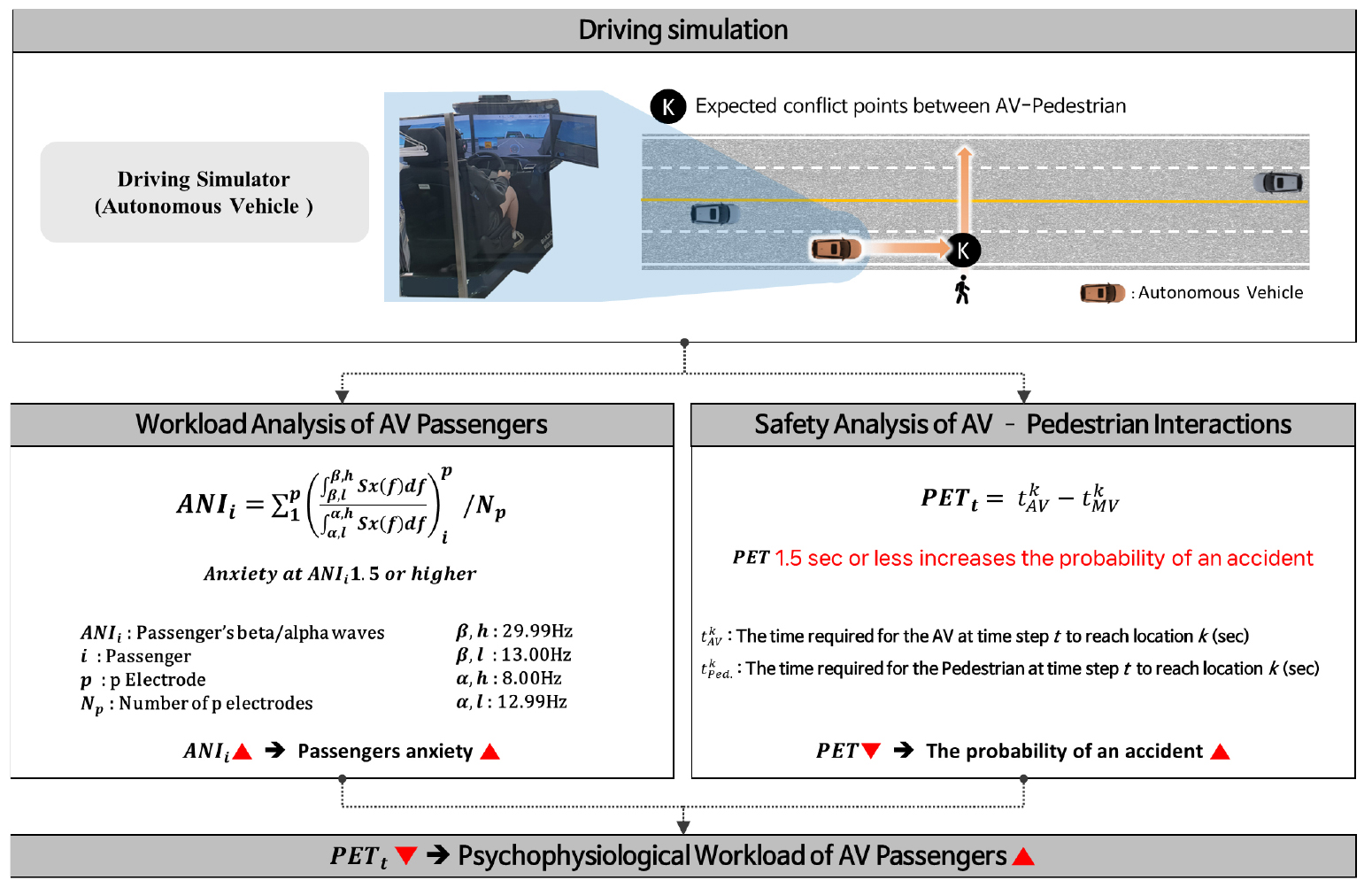
Table 2.
Information extractable from EEG analysis
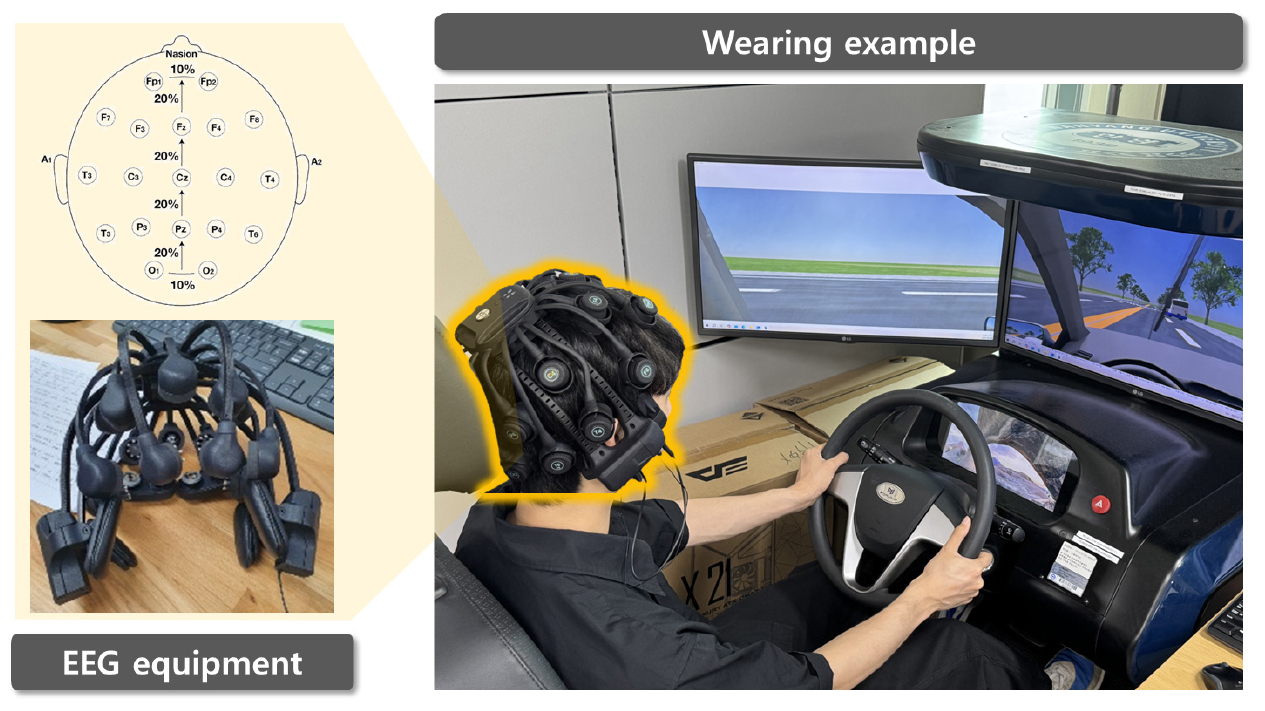
본 연구에서는 주행 시 보행자와의 상호작용에 따른 AV 탑승자의 불안감을 정량적으로 분석하기 위해 Figure 5에 제시된 Cognionics, Inc. 사의 뇌파 수집 장비를 이용하였다. 수집된 뇌파는 CGX Acquisition 프로그램을 이용하여 실시간으로 확인 가능하다. EEG 데이터 특성상 개인차가 존재하며, 개인차의 간극을 줄이기 위한 전처리 단계가 필수적이다. 본 연구에서는 기준선 보정 방법을 통해 EEG 데이터 전처리를 수행하였다. CGX Acquisition program을 이용해 1–40Hz 대역 통과 필터링을 적용하여 저주파 드리프트, 근전도 아티팩트, 고주파 잡음을 제거하였다(Delorme and Makeig, 2004). 또한, 안정적인 EEG 데이터 수집을 위해 모든 피실험자는 주행 시뮬레이터 탑승전에 10분간의 휴식 상태 뇌파를 기록하였으며, 휴식 상태에서 수집된 주파수 대역의 평균 전력 스펙트럼을 산출하고 주행 중 측정된 스펙트럼 값에서 소거하는 방식으로 개인 간 기저 차이를 고려하였다(Luck, 2014). 본 연구에서 심리생리적 작업부하는 피실험자의 불안감과 스트레스 정도를 의미하며, 피실험자의 α–β 대역의 상대적 활성에 기반하여 정량화한 수치를 ANI로 정의하였다. ANI의 값이 클수록 스트레스 수준이 높은 상태로 해석한다. Equation 1과 같이 전처리 된 beta(13–29Hz)와 alpha(8–12Hz) 전력값을 추출한 뒤 beta/alpha 비율을 계산하였다. 다양한 선행연구(Kang et al., 2024; Dasari et al., 2025)에서 베타파 대비 알파파의 세기가 클수록 심리 생리적 작업부하가 유의하게 증가하는 것으로 관찰되었다. 특히 Yusuf et al.(2019)의 연구에서는 β/α 비율이 1.5 이상일 시 뚜렷한 스트레스 상태를 의미함을 실험적으로 밝혀냈다.
여기서,
: Passenger
: p Electrode
: Number of p electrodes
: 29.99Hz
: 13.00Hz
: 12.99Hz
: 8.00Hz
차량과 보행자 상호작용 안전성 분석의 경우 본 연구에서는 DS로 수집한 AVs와 보행자 좌표, 각 객체의 속도, 상충 예상 지점의 좌표로 PET를 산출하였다. PET는 보행자와 차량 간의 충돌을 예측하는데 적절한 지표로 간주된다(Ismail et al., 2009). PET는 첫 번째 객체가 한 지점을 점유한 시간과 두 번째 객체가 연이어 도착한 시간의 차이를 의미한다. 본 연구에서는 t 시점에서 상충 예상 지점 k까지 두 객체의 예측 도달 시간의 차이로 현재 속도와 거리를 기반으로 예측된 PET를 산출하였다. 예측된 PET는 Equation 2와 같이 산출할 수 있으며, 상충 예상 지점에 도달하기까지 소요되는 차량과 보행자의 시간의 차를 의미한다(Johnsson et al., 2018; Mohamed and Saunier, 2013). PET의 사고발생 개연성의 기준이 되는 임계값을 도출한 연구를 Table 3에 제시하였으며, PET와 사고발생 개연성과의 관계를 검토하였다. 검토한 결과 surrogate safety assessment model(SSAM)의 경우 5초 미만을 사고 발생으로 간주하였으나(Gettman et al., 2008), 최근 연구의 결과로는 1~2초 범위에서 사고 발생 개연성이 증가하는 것으로 분석되었다. 본 연구에서는 뇌파 및 주행 시뮬레이션 수집 데이터를 활용하여 보행자와 상호작용 시 AV 탑승자의 작업부하를 나타내는 ANI-PET 관계를 나타내는 모델을 수립하였다. 모델 수립 시 PET는 ANI 범위에 따른 PET 값의 평균을 활용하였다.
여기서,
: The time required for the AV at time step t to reach location k(sec)
: The time required for the Pedestrian at time step t to reach location k(sec)
Table 3.
PET thresholds proposed by prior research
| Author & Year | Highlights | PET Threshold |
| Journal | ||
| Peesapati et al.(2018) |
•Feasibility analysis of PET utilization as a surrogate safety measure for intersection safety evaluation •Evaluation for the crash prediction by developing a generalized linear model (GLM) that integrates PET and intersection characteristics |
1.5s 1.0s |
| Safety Research | ||
| Qi, Weiwei, et al.(2020) |
•Proposal of modified PET models that account for lane changes at urban merges •Verification of model reliability through comparative analysis with PET datasets |
PET < 0.7 : Severe conflict 0.7 ≤ PET < 1.31 : Typical conflict 1.31 ≤PET < 2.25 : Minor conflict |
| IEEE Acccess | ||
| Paul, M., & Ghosh, I. (2020) |
•Collection and analysis of right-turn-related accident data and crossing-related accident data •Analysis of the conflict-accident correlation based on various PET thresholds | 1.0s |
| ICSP | ||
| Peesapati, L. N. et al.(2013) |
•Collection of PET data through video recording at 18 traffic signal intersections •Correlation analysis between accidents and PET thresholds |
3.0s : Low correlation with accident 1.0s : Highest correlation |
| TRR |
3. 휴먼팩터를 고려한 PET 임계값 도출
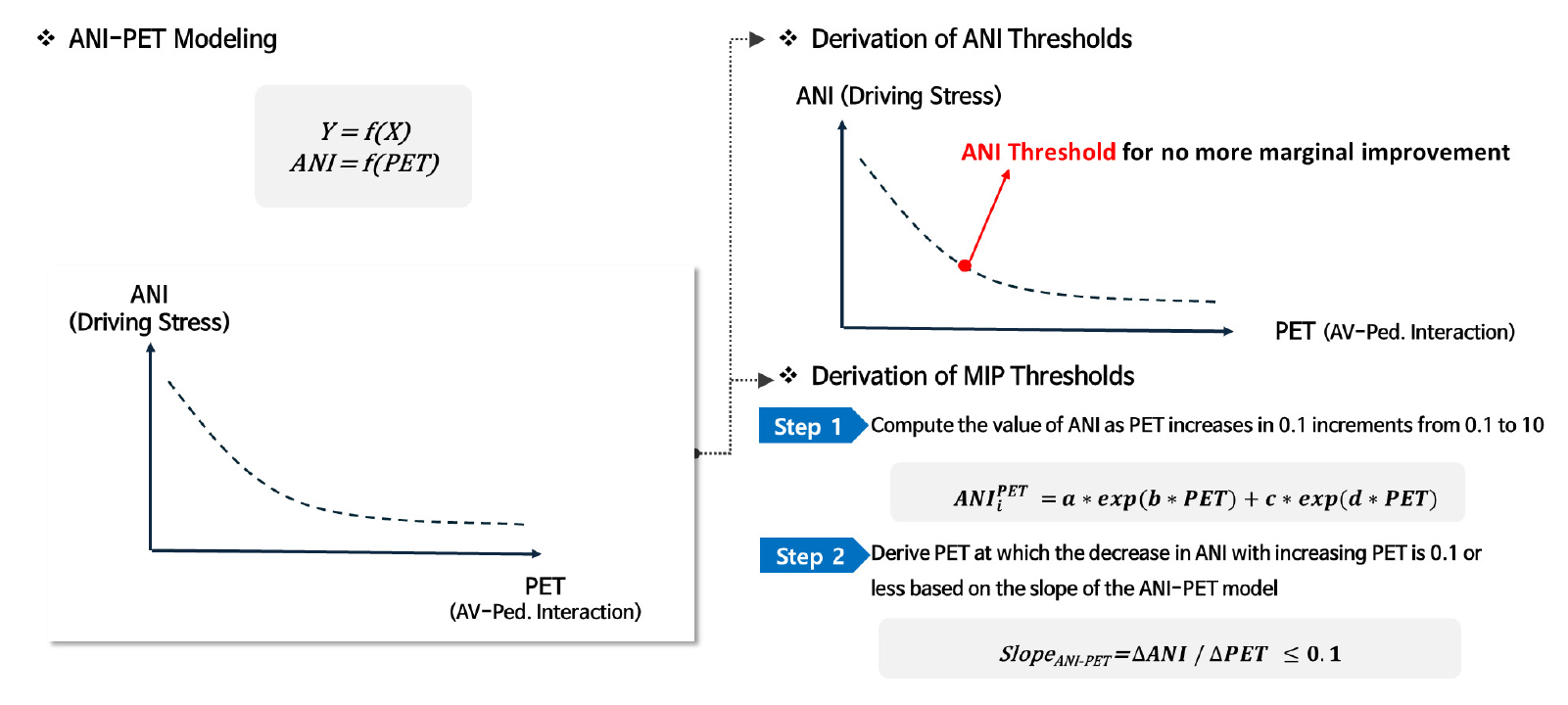
ANI와 PET의 관계를 기반으로 최적의 모형을 도출하고 AV 탑승자가 작업부하가 발생하지 않는 시점의 PET를 도출하여 휴먼팩터를 고려한 임계 PET 도출 기법을 설명한다. PET-ANI 최적 모형 도출을 위해 PET 범위에 따른 ANI의 평균을 활용하였다. 최적 모형 선정에 활용한 모형식은 총 5개로 지수(항개수:1), 지수(항개수:2), 가우스, 다항식(항개수:2), 사인 모형으로 구성되어 있다. 최적 모형의 경우 산출된 모형식별 Adj. R-squared 값을 확인하여 가장 높은 값이 산출된 함수식으로 선정하였다. 본 연구에서는 산출된 함수식을 기반으로 ANI가 1.5 이하로 내려가는 시점의 PET를 ANI 기반 PET 임계값으로 정의하였다, 또한, 보편적으로 PET가 증가할수록 ANI의 값은 감소할 것으로 예측되나, 특정 PET부터는 유의미한 ANI 감소가 발견되지 않을 것으로 판단된다. 따라서 더 이상의 유의미한 ANI 감소가 발견되지 않는 PET를 한계 개선 지점(Marginal Improvement Point, MIP)으로 정의하였다. MIP를 도출하기 위해 ANI-PET 관계식을 기반으로 PET의 값을 0.1부터 10까지 0.1씩 증가시켜 ANI의 값을 산출하였다. 산출된 ANI 값을 확인하여 PET 증가에 따른 ANI의 감소량이 0.01 이하로 유지되는 PET를 MIP 기반 PET 임계값으로 판단한다. 궁극적으로 분석을 통해 도출된 ANI 및 MIP 임계값을 활용하여 보행자와 상호작용할 시 AV 탑승자의 심리생리적 작업부하를 고려한 자율차 거동로직 설계에 반영할 수 있다. ANI 및 MIP 임계값 도출 방법은 Figure 6에 제시하였다.
본 연구에서는 시나리오별 PET-ANI의 관계를 기반으로 군집분석을 수행하여 PET의 임계값을 도출하였다. 각 시나리오에서 수집된 PET와 ANI 데이터를 활용하여 두 변수의 결합분포에 대해 혼합가우시안 모형(Gaussian Mixture Model, GMM) 기반의 군집화를 수행하였다. GMM은 PET-ANI 간의 비선형적 특성을 효과적으로 포착할 수 있어, 단순 거리기반 군집화보다 군집 간 경계를 명확히 구분할 수 있다(Patel and Kushwaha, 2020). 군집의 수는 탑승자의 불안 수준이 Anxious(불안), Relief(완화), Stable(안정)의 세 단계로 구분된다는 휴먼팩터 이론적 가정을 반영하여 k=3으로 설정하였다(Wickens et al., 2021; Hu and Hu, 2024; Kabilmiharbi et al., 2022). 각 시나리오에 대한 PET와 ANI는 표준화 후 GMM에 입력하였으며, 30회 이상의 반복 추정을 통해 최적의 모수를 추정하였다. 군집분석을 통해 구분된 군집 각각에 대해 PET의 평균값은 각 군집을 대표하는 전형적인 PET 수준을 의미하며, 군집 간 상대적 위험도 구분에 활용하였다. 또한, 본 연구에서는 Relief(완화) 단계의 군집에서 산출된 PET 평균을 해당 시나리오의 군집 기반 임계값으로 설정하였다. 군집 간 PET과 ANI의 통계적 차이는 Welch t-검정을 통해 평균 차이의 유의성을 검증하였다.
분석결과
1. AVD 분석 결과
본 연구에서는 선행연구에서 활용한 자율주행 거동 알고리즘에 실제 자율차의 주행행태 분석 결과를 기반으로 다음 time step의 가속도 및 감속도를 예측하는 거동 제어 로직을 수정하였다. 상암 자율주행차로부터 수집된 실제 AVs 주행데이터 기반 가속도 및 감속도의 기술통계량과 속도 범위에 따라 관측된 가속도의 85 percentile, 감속도의 15 percentile 값을 산출하였다. 산출한 속도별 가속도와 감속도의 결과는 Table 4에 제시하였다. 본 연구에서는 실제 AVs 속도와 가속도의 85 percentile 및 감속도의 15 percentile 간의 관계를 가장 효과적으로 설명할 수 있는 함수를 각각 도출하였다. 도출된 관계식은 가속도 및 감속도 모형 모두 항개수가 2개인 지수 함수로 속도-가속도 모형의 경우 72.56%의 설명력을 나타내고, 속도-감속도 모형의 경우 68.02%의 설명력을 나타낸다. 도출된 함수식은 Equation 3과 4에 제시하였으며, 함수식을 기반으로 시각화한 그래프는 Figure 7에 제시하였다.
Table 4.
Acceleration/deceleration results derived from AVD data
1) 속도-가속도 모형
2) 속도-감속도 모형
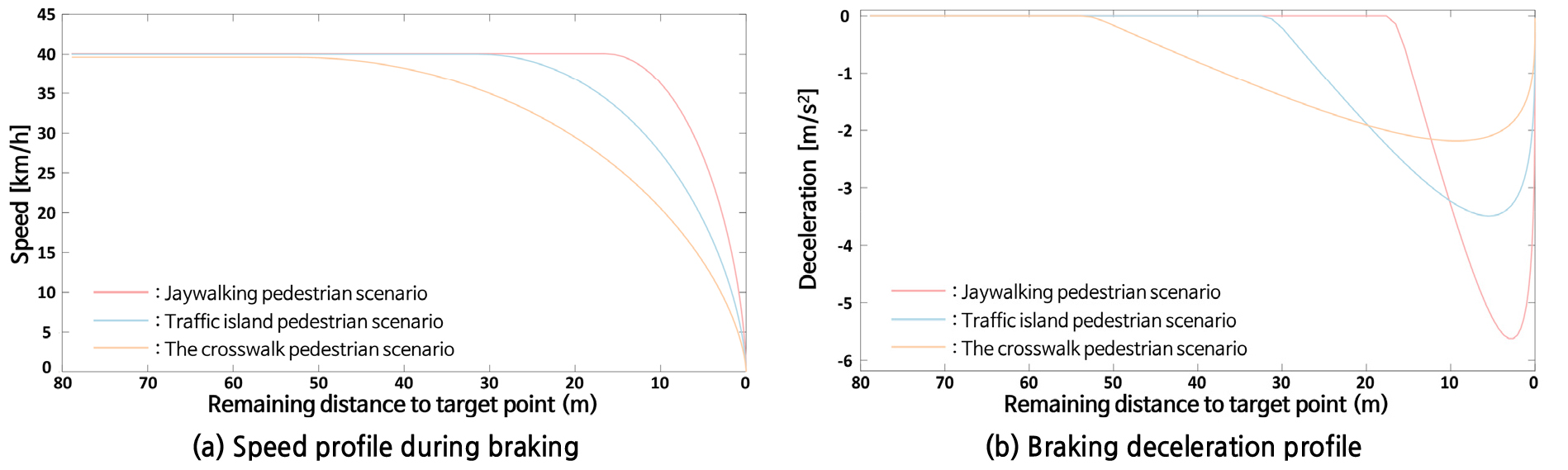
도출된 속도–가속도 모형은 주행 시뮬레이션 환경에서 자율주행차의 종방향 거동을 재현하기 위한 운동학적 파라미터로 활용하였다. 해당 모형은 의사결정 규칙이 아닌 차량의 물리적 감속 특성을 반영하였으며, 모델이 적용된 시나리오별 감속 프로파일과 감속도는 Figure 8에 제시하였다. 무단횡단 시나리오는 상대적으로 짧은 거리 내에서 급감속이 필요한 환경이다. 정지선 근처에서 감속도가 −4.5m/s2 수준까지 증가하며 짧은 구간 내 완전 정지를 달성하는 특성을 보인다. 교통섬 횡단 시나리오는 중간 수준의 접근 거리(약 30m)에서 감속을 시작하는 경우로, 보행자 인지 이후 점진적 감속 구간이 확대되어 −3m/s2 수준의 완만한 감속 후 정지에 도달한다. mid-block 횡단 시나리오는 약 50m 이상의 여유 거리를 두고 감속을 시작하는 장거리 감속 유형으로, 감속 초기에 −1.5m/s2 내외의 완만한 감속을 유지하다가 정지선 인근에서 점진적으로 감속 강도가 증가하는 형태를 나타낸다.
2. ANI-PET 분석 결과
본 연구에서 도출한 시나리오별 ANI-PET 평균 기반 최적 함수의 결과를 Table 5에 제시하였으며, 보행자-AVs 상호작용 시나리오에 대해 ANI–PET 평균 기반 최적 모형과 설명력(Adjusted R2)을 요약하였다. 모형 후보(1항 지수, 2항 지수, 가우스, 2항 다항, 사인) 중 무단횡단 상황과 mid-block 횡단 상황에서는 2항 지수 함수가 ANI-PET 평균 간의 관계를 가장 효과적으로 설명할 수 있는 것으로 도출되었다. 보행자가 교통섬으로 횡단하는 상호작용 상황의 경우는 가우스 함수가 최적의 함수로 도출되었다. 설명력은 무단횡단(0.968), 교통섬(0.982), mid-block (0.960)으로 전반적으로 높은 것으로 나타났다. 이러한 결과는 도출된 시나리오별 최적모형이 PET 증가에 따른 ANI 변화가 비선형 감소 패턴인 것을 의미한다. 상충 위험 예측이 시간적인 여유의 증가에 따라 급격히 감소하되 일정 구간 이후에는 감소하는 경향이 미비해지는 결과는 여러 연구의 결과와 정합한다(Chaudhari et al., 2021; Zhang et al., 2020; Zheng et al., 2021; Peesapati et al., 2018). 따라서, 본 연구의 목적인 AV 탑승자의 심리생리적 작업부하가 발생하지 않는 PET 임계값 도출에 최적 함수를 활용하여 신뢰도 높은 분석이 가능함을 의미한다.
Table 5.
Optimal model derivation results by scenario
1) Second-Order Exponential Function(exp2)
2) Gaussian Function(gauss)
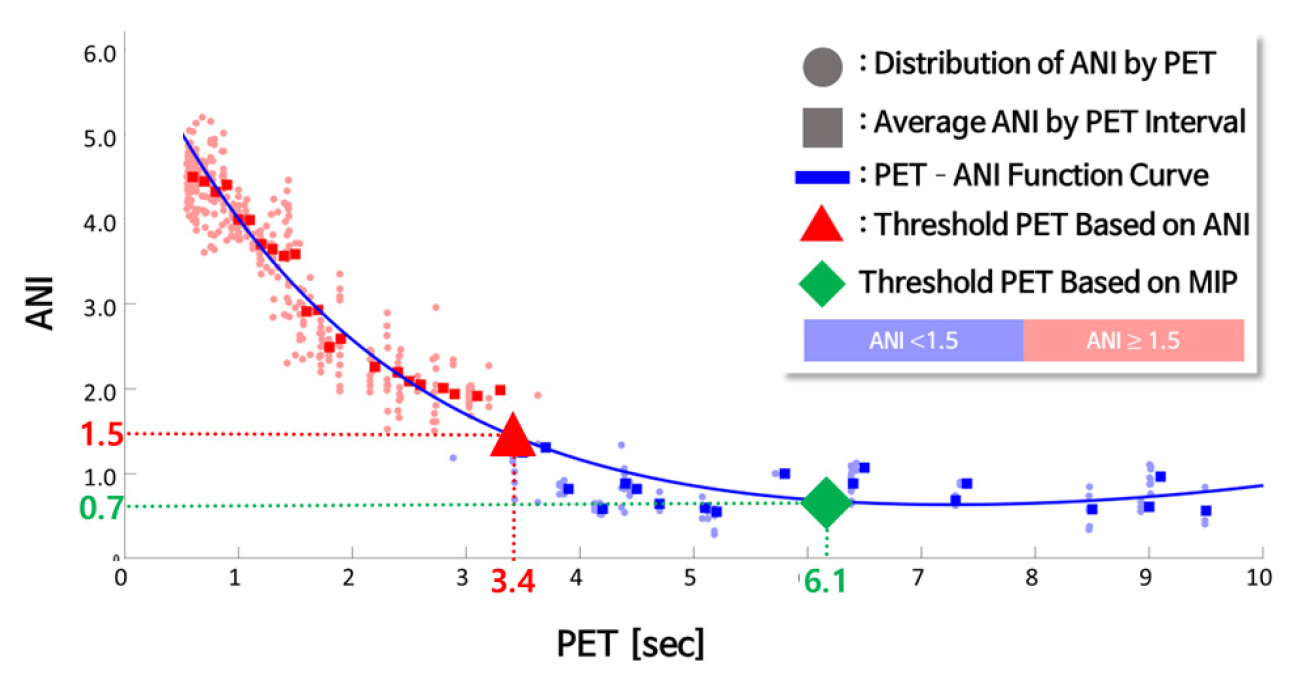
무단횡단 시나리오의 경우 예측 불확실성이 크다는 특성으로 인해 운전자에게 신속한 반응을 요구하고 상충 위험의 정도가 급격히 증대하는 것이 특징이다(Khuzam et al., 2025). 본 연구에서는 무단횡단 보행자–AVs 상호작용의 분석 결과를 Figure 9에 제시하였다. ANI 임계값을 기준으로 PET가 3.4초를 초과할 시 AV 탑승자의 심리생리적 작업부하가 발생하지 않는것으로 도출되었다. 또한, PET 증가에 따른 ANI의 감소가 유의미하게 관찰되지 않는 지점을 의미하는 MIP 기반 PET는 6.1초로 도출되었다. 본 연구에서 도출된 결과는 기존 PET의 임계값인 1.5초보다 시간적 여유가 충분하더라도 탑승자의 작업부하가 발생하는 것을 의미한다. 직접 제어권이 없는 AV 탑승자는 보행자가 무단횡단할 가능성에 의해 제어권 전환을 준비하는 과정에서 작업부하가 증대하는 것으로 판단된다. 이는 예기치 않은 돌발 상황에서 AV 탑승자의 심리 생리적 지표 변동이 불안할 수 있음을 보고한 실험과 합치하며(Palatinus et al., 2025), 자동화 상태에서의 감시·개입 의무가 객관적 인지부하를 증가시킬 수 있다는 결과와도 유사한 결과이다(Stapel et al., 2019).
무단횡단 시나리오에서 ANI-PET의 관계를 기반으로 수행한 군집분석 결과를 Figure 10에 제시하였다. 군집분석 결과 ANI-PET 결합분포는 명확히 세 개의 군집으로 구분되는 것으로 나타났다. Anxious Cluster는 PET 평균이 약 0.8초, ANI 평균이 약 4.9로 짧은 여유시간과 높은 불안 수준이 동반된 고위험 군집으로 해석된다. Relief Cluster는 PET 평균 약 2.3 초, ANI 평균이 약 2.5로 불안이 완화되며 안정으로 전이되는 완화 구간으로 나타났으며, 본 연구에서는 해당 구간의 평균 PET를 무단횡단 시나리오의 군집 기반 임계값으로 정의하였다. Stable Cluster는 PET 평균 약 5.2초, ANI 약 0.9로 PET가 높은 상황에서 탑승자의 심리적 안정이 유지되는 구간에 해당한다. 군집 간 t-검정 결과는 Table 6에 제시하였으며, 군집 간 PET와 ANI의 평균 차이가 모두 유의수준(p<0.001)에서 통계적으로 유의한 것으로 나타났다. 무단횡단 상황에서는 돌발적인 보행자 진입으로 인해 탑승자의 불안이 급격히 상승하나, 평균 2.3초 이상의 PET 부터는 심리적 안정으로 완화되는 것으로 판단 가능하다.
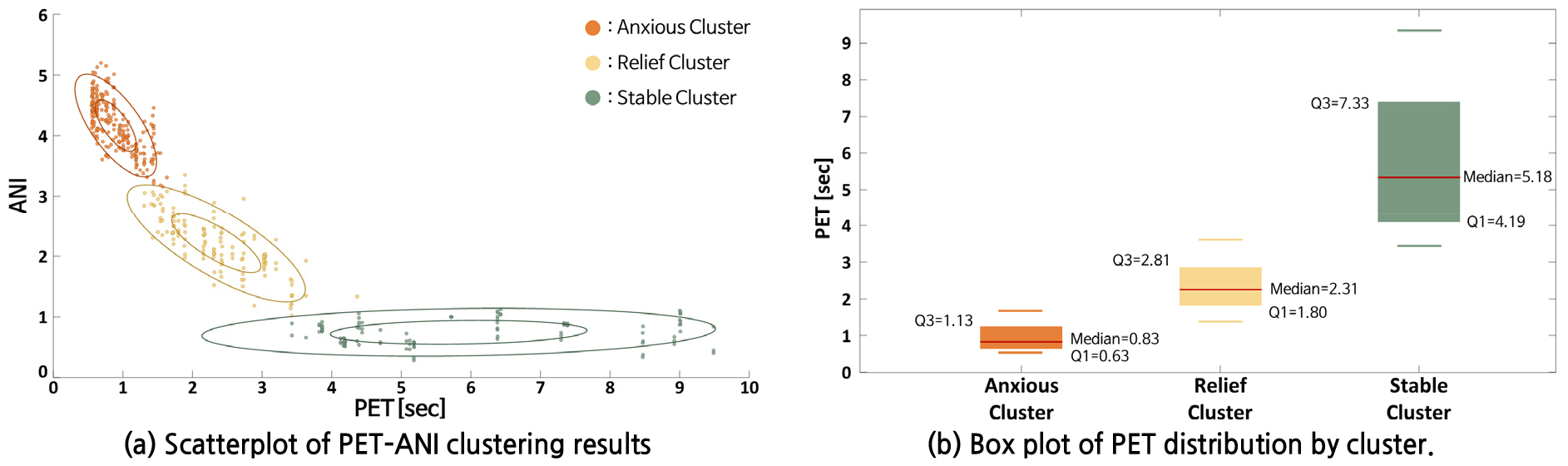
Table 6.
Cluster-wise t-test results for the jaywalking scenario
| Indicator | Cluster 1 | Cluster 2 |
Mean of Cluster 1 |
Mean of Cluster 2 | Mean diff | t | df | p-value |
| PET |
Anxious (N=237) |
Relief (N=136) | 0.897 | 2.351 | -1.444 | -24.792 | 164.964 | 0.000*** |
|
Relief (N=136) |
Stable (N=107) | 2.351 | 5.825 | -3.484 | -18.589 | 126.091 | 0.000*** | |
| ANI |
Anxious (N=237) |
Relief (N=136) | 4.167 | 2.216 | 1.951 | 38.926 | 251.243 | 0.000*** |
|
Relief (N=136) |
Stable (N=107) | 2.216 | 0.748 | 1.468 | 31.929 | 187.346 | 0.000*** |
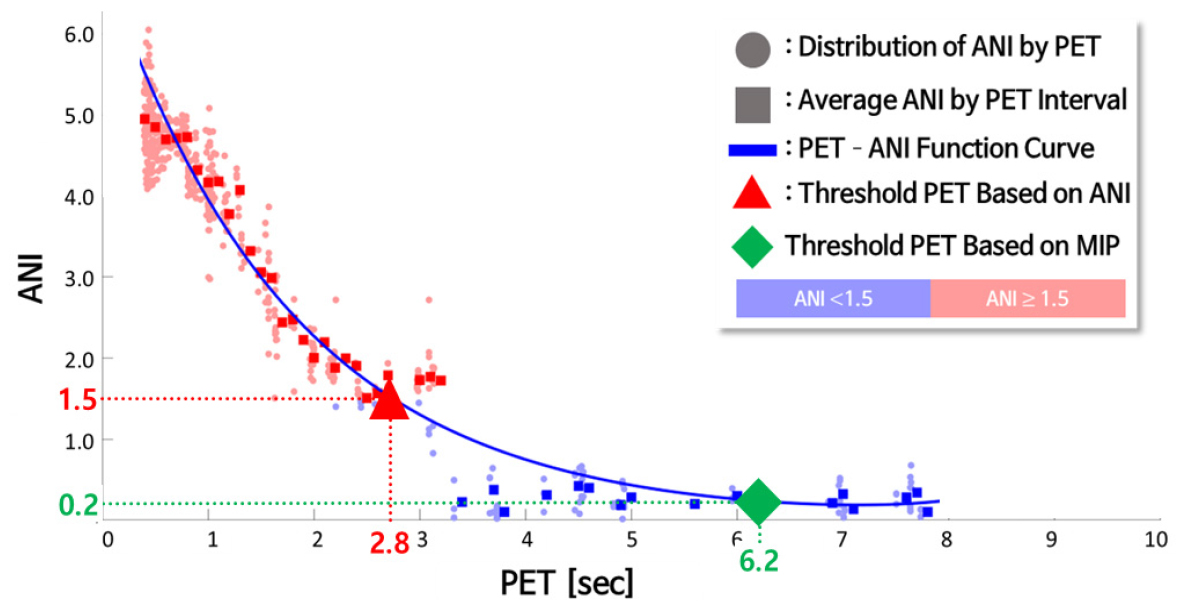
교통섬은 비보호 우회전 차량과 교통섬으로 횡단하는 보행자의 상호작용이 발생하는 구간이다. 차량은 진입 전에 미리 감속하는 패턴이 형성되지만, 곡선부·수목·시설물 등에 의해 제약을 받아 일반적인 보행자 상호작용 구간에 비해 보행자 인지가 지체될 수 있다는 환경적 요인이 함께 존재한다. 이러한 특성으로 인해 Figure 11에 제시한 분석결과와 같이 PET가 작은 구간에서 ANI가 빠르게 낮아졌다가, 약 3초에서 감소가 완만해지고, 5.7초 전후에서 확연한 감소가 보이지 않는 한계 개선 지점이 나타났다. 즉, 교통섬에서는 우회전을 위한 선제 감속을 유도하므로 탑승자의 불안감이 상당 부분 해소되지만, 간헐적 시거 제약이 남아 있어 완전한 안심에 이르기까지 일정한 여유시간이 추가로 요구되는 곡선의 형태가 도출된 것으로 판단된다(Schroeder and Rouphail, 2011; Jiang et al., 2020; Li and Fernie, 2010).
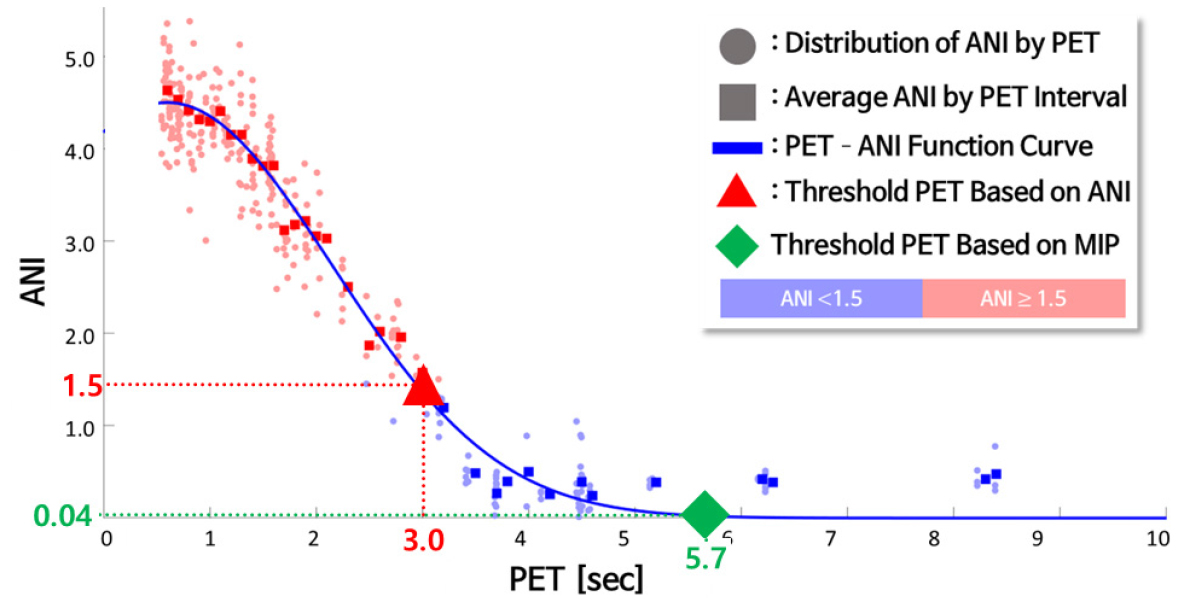
본 연구의 ANI 기반 PET 임계값은 3.0초로 산출되었으며, MIP 기반의 경우 5.7초로 도출되었다. 교통섬의 시거 제약과 곡선 진입 특성에서 AV 탑승자는 직접 제어권이 없는 상태로 주변 환경을 인지하고 제어권 전환을 대비를 위해, PET 3.0초 미만은 불안감 감소를 위한 시간으로 체감되지 않기 때문으로 판단된다.
교통섬 횡단 시나리오에서 ANI–PET의 관계를 기반으로 수행한 군집분석 결과를 Figure 12에 제시하였다. 군집분석 결과, ANI–PET 결합분포는 명확히 세 개의 군집으로 구분되는 것으로 나타났다. Anxious Cluster는 PET 평균이 약 0.9초, ANI 평균이 약 4.7로, 짧은 여유시간과 높은 불안 수준이 동반된 고위험 군집으로 해석된다. Relief Cluster는 PET 평균이 약 2.3초, ANI 평균이 약 2.4로, 불안이 완화되며 안정으로 전이되는 완화 구간으로 나타났으며, 본 연구에서는 해당 구간의 평균 PET을 교통섬 횡단 시나리오의 군집 기반 임계값으로 정의하였다. Stable Cluster는 PET 평균이 약 4.5초, ANI 평균이 약 1.0으로, PET가 충분히 확보되어 탑승자의 심리적 안정이 유지되는 구간으로 분류된다. 군집 간 t-검정 결과는 Table 7에 제시하였다. PET과 ANI 모두 군집 간 평균 차이가 유의수준(p < 0.001)에서 통계적으로 유의한 것으로 나타났다. 교통섬 횡단 시나리오의 경우 시야 제약으로 인해 보행자 인지 및 차량 반응이 지연되는 특성이 탑승자의 불안 완화 시점을 지연시키는 주요 요인임을 실증적으로 뒷받침한다.
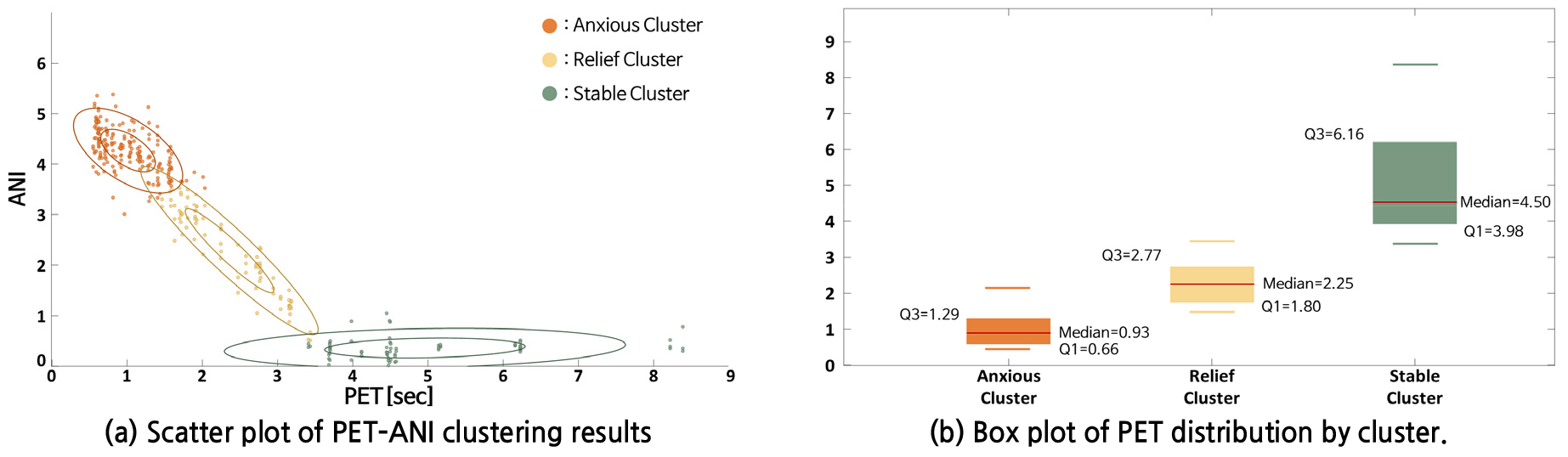
Table 7.
Cluster-wise t-test results for traffic island pedestrian scenario
| Indicator | Cluster 1 | Cluster 2 |
Mean of Cluster 1 |
Mean of Cluster 2 | Mean diff | t | df | p-value |
| PET |
Anxious (N=210) |
Relief (N=87) | 1.012 | 2.361 | -1.349 | -19.754 | 113.803 | 0.000*** |
|
Relief (N=87) |
Stable (N=69) | 2.361 | 4.959 | -2.598 | -14.953 | 88.936 | 0.000*** | |
| ANI |
Anxious (N=210) |
Relief (N=87) | 4.269 | 2.286 | 1.982 | 21.049 | 104.682 | 0.000*** |
|
Relief (N=87) |
Stable (N=69) | 2.286 | 0.361 | 1.926 | 20.784 | 97.874 | 0.000*** |
Mid-block 횡단보도는 차로 직선부에서 표지·표시로 보행 우선이 비교적 명확하다는 특성이 존재하며, AV는 접근 단계에서 조기 감속·양보 여부를 판단한다. 현장·시뮬레이션 연구에서도 mid-block에서는 차량의 조기 감속/양보가 상대적으로 잘 나타나고(Guo et al., 2022; Elsayyad et al., 2024), 시간 여유가 커질수록 상충 위험이 급감 후 완만해지는 패턴이 도출된다(Anwari et al., 2023; Ahsan et al., 2024; Angulo et al., 2024). Figure 13에 제시한 횡단보도 보행자-차량의 상호작용 분석결과가 유사한 패턴을 가지고 있음을 알 수 있다. ANI 임계값 1.5에 도달하는 PET는 2.8초, MIP는 6.2초로 나타났다. mid-block에서는 우선권의 명시성과 직선 시거·조기 감속 단서가 공통으로 작동해, PET가 2.8초 미만에서 탑승자의 작업부하 정도가 임계 이하로 안정화된다.
mid-block 횡단 시나리오에서 ANI–PET의 관계를 기반으로 수행한 군집분석 결과를 Figure 14에 제시하였다. 군집분석 결과, ANI–PET 결합분포는 명확히 세 개의 군집으로 구분되는 것으로 나타났다. Anxious Cluster는 PET 평균이 약 0.7초, ANI 평균이 약 4.8로, 짧은 여유시간과 높은 불안 수준이 함께 나타나는 고위험 군집으로 해석된다. Relief Cluster는 PET 평균이 약 2.2초, ANI 평균이 약 2.3으로, 불안이 완화되며 안정으로 전이되는 완화 구간으로 확인되었으며, 본 연구에서는 해당 구간의 평균 PET을 mid-block 횡단 시나리오의 군집 기반 임계값으로 정의하였다. Stable Cluster는 PET 평균이 약 4.9초, ANI 평균이 약 1.0으로, 충분한 여유시간이 확보되어 탑승자의 심리적 안정이 유지되는 구간에 해당한다. 군집 간 t-검정 결과는 Table 8에 제시하였다. PET과 ANI 모두에서 모든 군집 쌍의 평균 차이가 통계적으로 유의수준(p < 0.001)에서 유의하게 나타났으며, PET 기준으로 Anxious–Relief 간 평균 차이는 약 1.5초, Relief–Stable 간 평균 차이는 약 3.2초로 나타났다.
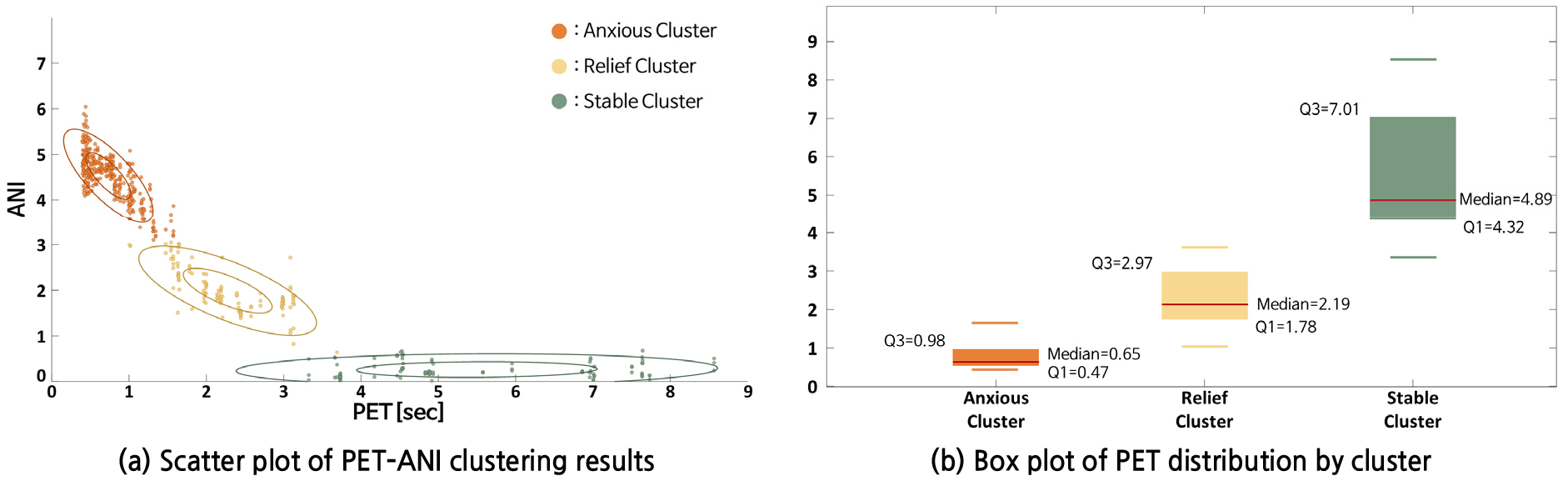
Table 8.
Cluster-wise t-test results for traffic island pedestrian scenario
본 연구의 종합 결과는 Table 9에 제시하였다. ANI 기반 예측 PET 임계값(3.4 s, 3.0 s, 2.8 s)은 기존 물리적 PET 임계값(약 1.0–1.5 s)에 비해 더 크게 나타났다. 이는 물리적 충돌 회피를 위한 최소 시간과 달리, 탑승자의 심리적 불안이 완화되는 데 필요한 시간적 여유가 더 길기 때문으로 해석된다. 즉, 예측 PET가 일정 수준 이상 확보될 때 탑승자의 ANI가 안정화되며, 이는 기존 물리적 기준만으로는 설명할 수 없는 휴먼팩터 기반 안전성의 차이를 보여준다. 세부적으로 ANI 기반 PET의 임계값은 상충 예측 가능성이 낮을수록 충분한 시간이 필요한 것으로 도출되었다. 무단횡단과 같이 돌발상황이 발생하는 시나리오의 경우 직접 제어권이 없는 AV 탑승자가 기존 PET의 임계값보다 더 큰 PET인 3.4초에서 불안감이 안정화되는 것으로 나타났다. 반면 구조와 단서가 명확한 mid-block에서는 ANI 기반 PET의 임계값이 2.8 초로 도출되었다. MIP 기반 PET의 임계값은 약 5.7~6.2 초에서 수렴하는 것으로 도출되었다. 이는 PET가 6.2초 이상일 시 추가적인 시간적 여유 확보에 상관없이 불안감 개선의 실질 한계가 유사한 것을 의미한다. 또한, PET가 2~3 초 부근에서 작업부하가 사라지는 핵심 구간으로 확인됨에 따라 자율주행차의 알고리즘 개발 시 본 연구에서 도출된 결과를 반영하여 개발할 필요성을 시사한다.
Table 9.
Derived PET thresholds for each scenario
결론
본 연구는 실제 자율주행차 주행데이터를 반영해 시뮬레이션 환경에서 자율차 거동을 구현하고, DS를 활용하여 AV 탑승자와 보행자간 상호작용을 세 가지 ODDs(무단횡단, 교통섬, mid-block 횡단) 시나리오를 대상으로 분석을 수행하였다. AV 탑승자의 휴먼팩터 고려하기 위해 ANI를 산출하고, 주행 시뮬레이터로부터 수집된 PET 비교분석하여 시나리오별 ANI–PET 최적 함수와 PET 임계값 도출하였다. 최적 함수는 교통섬 횡단 보행자-AV 탑승자 시나리오의 경우 gauss 함수로 도출되었으며, 이 외 다른 시나리오의 경우 2항 지수함수가 최적 함수가 높은 설명력으로 공통된 비선형 감소 패턴을 보이는 것으로 도출되었다.
본 연구에서 제시한 PET의 임계값은 예측이 어려운 상황일 수록 더 높은 PET에서 AV 탑승자의 불안감이 해소되는 것으로 확인되었다(무단횡단 : 3.4 sec, 교통섬: 3.0 sec, 횡단보도: 2.8 sec). 이러한 결과는 통제권이 없는 AV 탑승자가 예측이 어려운 상황에서 더 큰 PET가 필요하며, 구조적으로 예측이 쉬운 mid-block에서는 2.8초로 도출되었다. MIP는 시나리오·역할과 무관하게 약 5.7–6.2초의 범위로 수렴했다(무단횡단 : 6.1 sec , 교통섬: 5.7 sec, 횡단보도: 6.2 sec). 이는 임계 PET 이상에서 조기·완만 감속으로 불안을 신속히 낮추고, MIP 부근에서는 자율차가 추가적인 PET를 확보하더라도 더 이상 작업부하의 정도를 감소시키지 않는다는 해석이 가능하다. 마지막으로 군집분석을 통해 Relief Cluster의 평균값을 기반으로 PET의 임계값을 도출하였다. 분석 결과 상대적으로 예측이 가능한 Mid-block 횡단 시나리오의 PET 임계값은 2.3초로 도출되었으며, 그 외 시나리오의 경우 2.4초로 도출되었다. 이는 약 2.4초 PET부터 AV 탑승자의 불안감이 불안에서 안정으로 전환되는 것을 의미한다. 본 연구에서 제시한 3개의 PET 임계값을 통해 교통상황과 탑승자의 안전을 위한 자율차 알고리즘 고도화의 기준을 수립할 수 있을 것으로 판단된다. 또한, 본 연구의 결과는 기존 충돌회피만을 고려한 상호작용 평가지표의 임계값인 1.5초보다 높은 것으로 도출되었다. 이는 자율주행 시스템 설계 시 기술적 성능뿐만 아니라 상호작용하는 탑승자의 인지적, 심리적 특성을 고려하여 알고리즘을 개발할 필요가 있으며, 혼재 교통상황에서는 기존의 안전기준을 넘어선 새로운 기준 정립이 요구된다는 것을 방증한다.
본 연구 결과는 다양한 측면에서 활용될 수 있다. 첫째, 자율차 안전성 평가 기준 수립 측면에서 시나리오·역할별로 도출한 ANI 기반 및 MIP 기반 PET 임계값을 활용하여 AVs 성능 평가의 정량적 기준으로 활용할 수 있다. 둘째, 자율차 알고리즘 개선 측면에서 ODDs별 안전 진입 조건을 로직화할 수 있다. ANI 기반 PET 임계값을 기준으로 탑승자가 불안감을 느끼는 PET 범위에서 정지 및 양보를 통해 안전을 확보할 수 있다. 또한, ANI 임계값과 MIP 임계값 사이에 PET가 산출될 시 선제적인 감속을 수행하고, PET가 MIP 임계값 이상으로 산출될 시 추가적인 감속을 억제함으로써 혼재교통 안전성과 효율을 동시에 높이는 전략을 수립할 수 있다. 마지막으로, 교통 정책·교육 측면에서 본 결과는 혼재교통 환경의 보행자 안전 정책과 AV 탑승자 교육 프로그램의 기초자료로 활용가능하다.
본 연구는 주행 시뮬레이션을 활용하여 분석을 진행하였다는 한계로 인해 실도로의 결과와 차이가 있을 수 있다. 따라서, 향후 실도로 데이터 수집을 통해 본 연구의 신뢰도를 향상시킬 필요가 있다. 또한 교통량, 주야간, 강우와 같은 기상조건, 현장의 시거와 기하조건 등 다양한 외적 환경에 따라 상이한 PET 임계값이 도출될 수 있다. 따라서 다양한 외부환경이 자율차와 보행자의 상호작용에 미치는 영향을 분석하여 PET 임계값을 보정하는 연구가 향후 진행되어야 한다. 본 연구는 총 15명의 성인으로 구성된 실험자를 대상으로 실험을 진행하였다. 따라서, 향후 다양한 피실험자 집단을 구성하고 동일한 분석을 수행할 필요가 있다. 또한, 가상 환경에 구현한 보행자는 성인으로 통일되어 있으나 보행자의 경우 성별, 나이 등에 따라 보행행태와 인지 거리에 차이가 있다. 향후 다양한 보행자를 구성하고 보행자 특성에 따른 실험 결과 비교를 통해 어린이 보호구역, 노인 보호구역과 같은 특수 환경에서의 PET 임계값을 도출할 필요가 있다.
본 연구는 자율주행 기술이 발전함에 따라 혼재교통환경이 장기간 지속될 것으로 예상되는 상황에서, AV 탑승자의 휴먼팩터를 고려한 자율차 거동 요구사항을 도출했다는 점에서 큰 의의가 있다. 특히 뇌파 측정을 통한 AV 탑승자의 불안감 정량화와 이를 객관적 안전 지표와 연계한 분석 방법론은 향후 자율주행차 연구에 있어 인간 중심적 접근의 중요한 토대가 될 것으로 기대된다.
