

서론
선행연구 및 차별성
분석방법론 : 구조방정식모델(SEM)
자료수집 및 기초통계분석
1. 설문조사 개요
2. 기초 통계분석
자율주행차량의 선호 분석
1. 분석의 개요
2. 자율주행차량 선호에 대한 모형
결론 및 향후과제
서론
자동차 산업은 기존의 정통적인 자동차에서 ICT(Information & Communication Technologies)기술 등이 집약된 자율주행차량으로 빠르게 진화 중이다. 자율주행차량(Autonomus Driving Vehicle)이란 운전자는 탑승을 하지만 운전자는 목표지점을 설정한 뒤 차량에 대한 조작 없이 목표지점까지 스스로 주행환경을 인식하여 운행할 수 있는 차량을 말한다. 이에 운전자들은 자율주행차량이 발전을 하면 할수록 운전자에서 탑승자로 변화를 하고 있으며 자율주행시스템으로 인해 운전자의 부주의로 인한 교통사고와 운전으로 피로도와 스트레스에서 벗어나며, 운전자들은 자율주행차량으로 인한 편의 및 안전의 향상을 기대하고있다.
하지만, 미국자동차협회(AAA)에서 2018년도에 실시한 자율주행차량에 관한 설문조사에 따르면, 운전자의 개입이 필요하지 않은 완전 자율주행차량의 탑승 여부에 대해 73%의 응답자들이 “탑승하기에 두렵다”라고 응답을 하였다. 이는 완전 자율주행차량의 잇따른 사고로 인한 완전 자율주행차량에 대한 신뢰도가 대폭 하락하였기 때문이다(Bea 2018).
또한, Litman(2022)에 의하면, 자율주행차량에 대해 2030년부터 운전자를 대체할 만큼 안전에 대한 신뢰성이 높아지며, 적정한 가격의 자율주행차량이 2040년대에서 2060년대에 걸쳐 보급될 것을 예측하였다. 하지만, 자율주행차의 기술개발, 편익과 자율주행차량으로 인한 통행의 영향, 비용과 소비자의 수요 등 고려해야 할 사항이 많음을 지적하였다. 즉 차량을 개발하는 산업계에서는 이를 반기는 한편 사회기반시설을 다루어야 하는 측면에서는 예상치 못한 환경에서의 신뢰할만한 자율주행 능력이 보장이 되어야한다. 예를 들어 복잡한 도심지역 교통상황이나, 악천후로 인한 자율주행 시스템의 안정성, 정밀지도의 신규 구축과 정확성을 유지하여야 한다. 또한, 자율주행차량에 대한 운전자가 느끼는 실질적인 편익에 대한 비용에 대한 분석과 자율주행차량의 안전성 부분의 신뢰도와 편익에 따른 자율주행차량의 구매의사 관계, 자율주행차량의 보급이 이루어지면서 일반차량과의 혼재 등 자율주행차량으로 인한 통행 행태의 변화에 따른 면밀한 연구가 필요하다.
이와 같은 배경으로 본 연구에서는 자율주행차량의 상용화에 앞서 시민들의 의식을 조사하여 자율주행차량에 대한 선호의식을 분석하고자 한다. 이를 위해 본 연구는 설문조사의 개요와 기초 통계분석 후 응답자들의 선호의식을 모형화하기 위한 구조방정식모델의 기본개념과 분석 결과들을 제시하였으며 연구의 결과 및 향후 연구방향에 대해 기술하였다.
선행연구 및 차별성
자율주행차량 관련 연구는 국내·외에서 활발하게 진행이 되고 있다. 주로 자율주행차량의 기술에 관한 연구가 이루어지고 있으며, 그 외에는 자율주행차량의 안전한 운행을 위한 도로 네트워크 및 V2X통신시스템에 관한 연구(Kang, 2021; Han et al., 2016; Park et al., 2021) 자율주행차량의 도입으로 인해 발생하는 법·제도에 관한 연구(Lee and Hwang, 2019; Yoon, 2017)와 자율주행차량을 위한 도로의 인프라에 대한 연구(So and Moon, 2018), 자율주행차량의 선호 요인에 대한 연구(Lee and Jung, 2018)등 다양한 연구가 이루어졌다.
본 연구와 관련하여 최근 수행된 자율주행차량에 대한 선호 요인에 관한 연구들이 있다. Lee and Jung(2018)은 FAV(Fully AV)의 상용화 상황을 가정하고 하여 SBFAV(Share-based FAV)에 대한 개인의 선호 요인을 다항로짓모형을 활용하여 분석하였다. 소득이 낮으며 AV에 대한 기대감이 높으면서 주 교통수단이 자가용이 아닌 경우에 AV가 아닌 SBFAV를 선호할 확률이 높은 것으로 분석을 하였다. Li et al.(2021)은 단순한 도로, 일반적인 도로, 복잡한 도로의 시나리오에서 자율주행차량에 대한 사용자의 만족도에 영향을 미치는 요인을 구조방정식모델을 이용하여 분석하였다. 자율주행차량에 대한 이익과 위험은 단순한 도로와 일반적인 도로에서 각각 유의한 결과의 긍정적인 영향과 부정적인 영향을 보였으며 복잡한 도로에서는 유의하지 않은 결과를 보였다. 또한, 자율주행차량 탑승을 경험한 운전자는 자율주행차량에 대한 이익보단 위험을 더욱 중요시하는 경향을 보였으며, 인프라에 대한 적응성은 자기효능감에 긍정적인 영향을 보이지만 도로가 복잡해질수록 끼치는 영향이 줄어드는 것으로 분석을 하였다. Wang and Zhao(2019)은 경제적 지위 및 자율주행차량의 위험에 대한 인식이 자율주행차량에 대한 연관성을 분석하였다. 위험에 따른 매개변수는 사화 경제적 변수와 유의한 관계를 가지고 있었으며, 고령자, 빈곤층, 여성 및 실업자들은 더욱 위험에 대해서 기피를 하는 성향을 나타냈다.
So(2018)는 자율주행차량의 확대 보급과 함께 자율주행차량에 의한 교통사고가 증가함에 따라 현재의 자율주행차량의 센서만으로는 인지능력의 한계와 V2X 무선통신과 정밀도로지도 등 디지털 시스템의 개발 및 표준동향에 대한 연구를 실시하였다. Bae et al.(2018)은 자율협력주행 도로시스템의 도로인프라에서 자율주행차량에 제공하는 서비스의 품질을 확인하기 위한 수단으로 현장 환경에서 적용 가능한 평가시스템과 평가방법을 제안하였다. Baek et al.(2021)은 도심로 교차로 상황에서 V2X를 활용한 자율주행차량의 시나리오를 제시하여 도심 신호 교차로의 시나리오로부터 기능에 대한 오작동 정의를 수행하고 차량 수준의 위험원을 도출, 시뮬레이션을 통해 고장의 유형별 차량의 거동을 확인하고 위험성을 평가하였다. Jung et el.(2018)은 자율협력주행 차량에 적용되는 V2X 보안통신의 신뢰성을 검증하기 위한 절차와 시나리오를 제시하였다.
본 연구의 주제인 자율주행차량과 관련된 선행연구들을 검토한 결과 자율주행차량에 대한 시민들의 인식에 대한 중요성과 또한 자율주행차량의 보급률과 도로인프라의 첨단화의 필요성이 강조되고 있다. 하지만, 본 연구와 같이 자율주행차량에 대한 시민들의 의식과 자율주행차량의 보급률 및 도로인프라의 첨단화요인을 같이 고려한 연구는 드믄 실정이다. 따라서 본 연구에서는 선행연구을 바탕으로 자율주행차량의 보급률 및 도로 인프라의 첨단화가 자율주행차량의 선호의향에 어떠한 영향을 미치는가를 변수들 상호 간의 인과관계와 유의성을 검증할 수 있는 구조방정식모델(SEM)을 이용하여 분석하고자 한다.
분석방법론 : 구조방정식모델(SEM)
구조방정식모델은 변수들 상호 간의 인과관계와 그 유의성을 검증하기위한 방법론중 하나이다. 주로 사회현상이나 경제 현상 연구에서 사용되며, 각 요인들 또는 변수들 간의 복잡한 인과관계를 파악하기 위해서 이용된다.
구조방정식모델은 확인적 요인분석과 경로분석이 결합된 형태이며, 모형 형태의 관점에서 보면 요인분석은 측정모형에 해당하고, 경로분석은 구조모형에 해당된다. 구조방정식 모형에서 사용되어지는 변수는 잠재변수, 관측변수, 외생변수, 내생변수, 측정오차, 구조오차가 있다.
잠재변수는 구조방정식모델에서만 사용되는 변수로서 직접 관측되지 않고 관측변수에 의해서 간접적으로 추정된다. 여기에서 관측변수는 실제 조사나 측정을 통해서 직접적으로 얻어지는 변수를 말한다. 외생변수는 독립변수의 개념에 해당하며 다른 변수에 영향을 주는 변수이고 내생변수는 종속변수의 개념에 해당하며 다른 변수로부터 한 번 이상 직간접적으로 영향을 받는 변수이다. 측정오차는 잠재변수가 관측변수를 설명하고 난 나머지 부분, 즉 관측변수만으로 설명하지 못하는 부분을 의미한다. 구조오차의 경우 내생변수가 다른 변수들에 의해 설명이 되고 난 나머지 부분을 뜻한다.
기존의 상관분석, 회귀분석 등 다양한 통계분석 방법들은 독립변수의 측정오차를 고려하지 않지만, 구조방정식모델에서는 이를 포함시켜 측정오차 및 구조오차의 포함을 통하여 추정 값들의 신뢰 및 조정이 좀 더 가능하여 정확한 분석에 접근할 수 있다. 또한 구조방정식모델은 종속변수에 여러개의 독립변수들을 동시에 분석하여 변수 간 인과관계를 파악할 수 있으며, 개별적이지만 상호 종속적인 관계를 갖는 모델을 동시에 추정할 수 있다. 또한 각 변수들 간의 직접효과와 간접효과, 총 효과들을 추정할 수 있는 장점을 가지고 있다.
하지만 연구자의 주관이 많이 개입이 되어 연구의 객관성이 흐려질 수 있기 때문에 구조방정식모델에는 많은 평가지표들이 이를 보안하기 위해 존재하며, 적어도 Relative fit index와 Absolute fit index에서 한 개 이상의 적합도를 만족시켜야 모형이 설정된 모델이 자료에 적합하다고 볼 수 있다. 본 연구에서 사용될 지표는 Table 1과 같다. (Hong, 2000; Kang, 2013)
Table 1.
Model fit to used
자료수집 및 기초통계분석
1. 설문조사 개요
본 연구에서는 자율주행차량에 대한 운전자들의 인식 분석을 목적으로 설문조사를 실시하였다. 조사는 온라인 조사방식으로 하였으며 기간은 2021년 09월 27일부터 2021년 10월 22일 동안 500명을 표본으로 하여 진행하였다. 설문의 대상은 운전면허증을 소유하고 최근 1년간 운전경험이 있는 수도권을 포함한 광역도시의 거주자들을 대상으로 선정하였다. 이는 주로 C-ITS(차세대 지능형 교통시스템)이 수도권과 광역시와 같은 주로 대도시를 중심으로 사업이 이루어지고 있는 것을 고려하였으며, 주요 설문 항목으로는 응답자들의 개인속성과 보유중인 차량의 정보 자율주행차량에 대한 지식 그리고, 자율주행차량에 기대하고 있는 편익과 자율주행차량에 대한 우려사항에 대해 조사를 하였으며, 자율주행차량의 보급률과 도로인프라의 첨단화에 따라서 자율주행차량의 안전성과 편의성의 향상에 대한 응답자들의 인식을 조사하였다. 마지막으로 SP조사를 통한 자율주행차량에 대한 선호를 조사하였다.
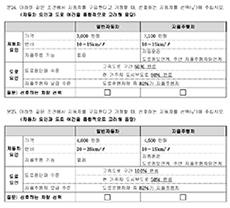
먼저 자율주행차량에 대한 기대 편익과 우려에 대한 조사는 미래에 응답자가 자율주행차량에 탑승을 하였을 때를 가정하여 발생할 수 있는 편익과 우려에 대해 5점 척도로 응답을 하도록 하였으며, 편익은 총 6개(교통사고 감소, 교통사고 심각도 감소 등), 우려는 총 7개(자율주행시스템의 오류, 자율주행시스템의 보안 등)에 대해 조사를 하였다. 또한, 자율주행차량의 보급률과 도로인프라의 첨단화에 따라서 자율주행차량의 안전성과 편의성의 향상에 대해 5점 척도로 응답을 하도록 하였으며, SP조사로 이루어진 자율주행차량에 대한 조사는 비자율주행차량과 자율주행차량의 가격, 연비, 고속도로의 첨단화, 도시부도로의 첨단화, 자율주행차량의 보급률을 변수로 설정하여 응답자들이 이항선택을 할 수 있도록 하였으며, 설문의 예시는 Table 2에 나타내었다.
Table 2.
Outline for the survevy


2. 기초 통계분석
1) 응답자 개인 속성분석
Figure 1은 설문에 응답한 500명에 대한 개인속성 및 자율주행차량에 대한 지식수준을 단순 집계한 것이며, Table 3은 개인속성에 대한 요인을 나타낸 것이다. 성별과 연령 월 소득은 비교적 균일하게 분포되어있음을 확인할 수 있으며, 자율주행차량에 대한 지식은 모르고 있는 경우가 52.4%로 알고 있는 경우보다 더 높은 것으로 나타났다.
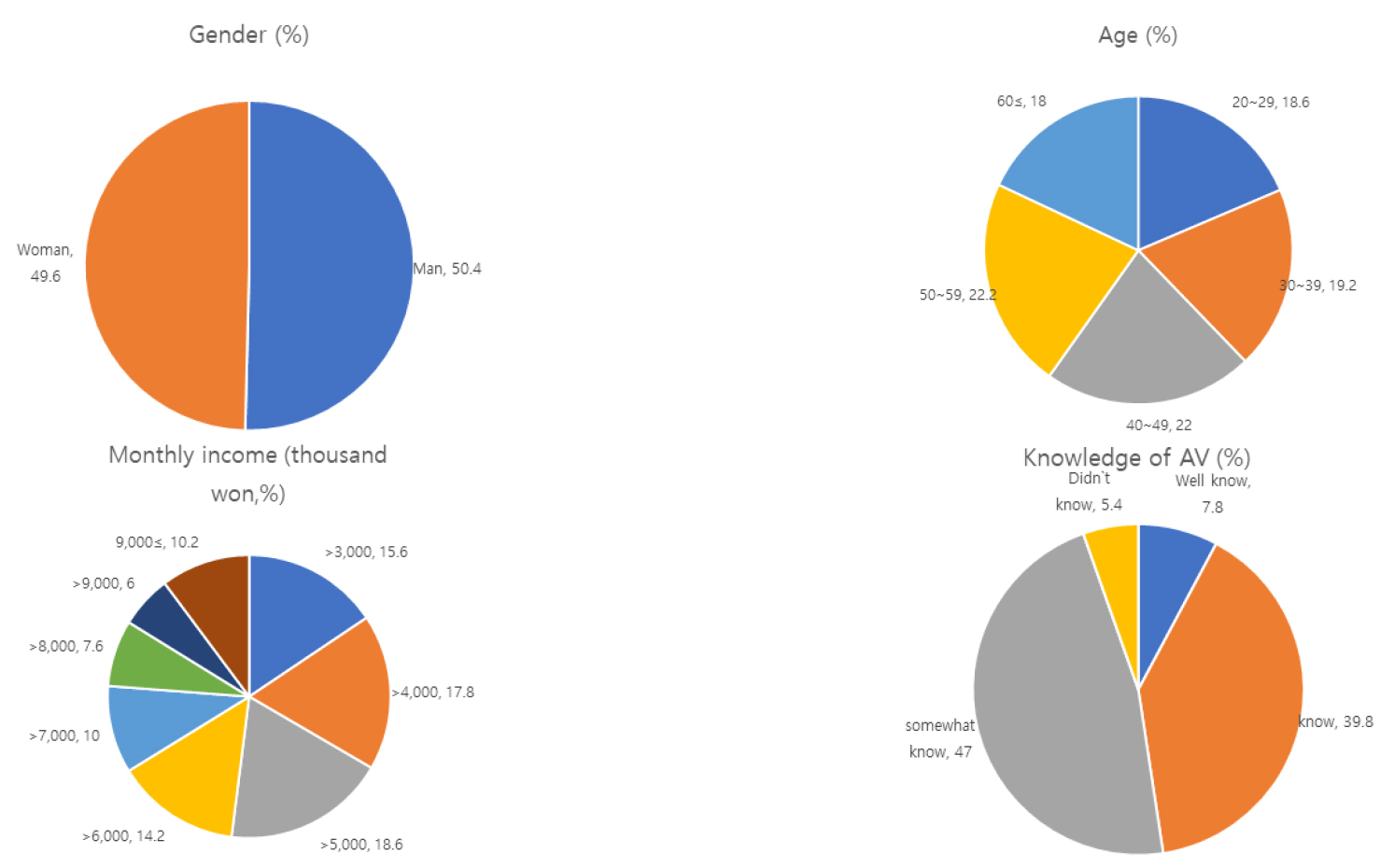
Table 3.
Personal attribute factor
| Factor | Items | |
|
Personal attribute (PA) | PA1 | Gender |
| PA2 | Age | |
| PA3 | Monthly income | |
| PA4 | Knowledge AV | |
2) 자율주행차량에 대한 인식
Table 4는 자율주행차량에 대한 편익과 우려 사항에 대한 조사항목 및 편익과 우려에 관한 인식을 5점 척도로 조사한 결과이다. 자율주행차에 대한 응답자들의 편익에 대한 전체 평균은 3.19이며 응답자들의 우려에 대한 전체 평균은 3.39이다. 상대적으로 우려에 대한 부정적인 인식이 높았으나 유의한 차이는 없는 것으로 보인다. 편익의 경우는 운전으로 인한 피로도 감소에 대한 인식이 높게 나타났으며, 다음으로는 자율주행차량에 탑승하여 운행하는 중 기타 활동이나 여가 활동이 가능한 점, 사고 건수의 감소, 사고의 심각도 감소 순으로 나타났다. 다음으로 자율주행차량에 대한 우려에 대한 부분은 일반차량과의 시스템의 보안에 대한 우려가 가장 높게 나타났으며, 자율주행시스템의 에러, 돌발상황에 대한 우려, 기상 악화 시 자율주행차량의 성능 악화 및 보행자 및 자전거와의 사고가능성, 개인정보의 유출에 관한 순으로 나타났으며, 일반차량과의 사고가 가장 낮게 나타났다.
Table 4.
Factor, their items and respondents perception about AV
3) 자율주행차량의 보급률과 도로인프라의 첨단화에 대한 인식
현재 자율주행차량은 주로 차량에 부착된 센서들에 의지하여 자율주행시스템을 실현하고 있다. 하지만 많은 연구들에서 보다 안전하고 편리한 자율주행차량의 운행을 위해서는 V2X 통신의 뒷받침이 필요하다고 한다. V2X 통신이란 자율주행차량과 다른 대상과의 통신이며, V2V 통신은 자율주행차량과 자율주행차량끼리의 통신, V2I 통신은 자율주행차량과 인프라 간의 통신을 의미한다. 여기에서 V2V 통신이 이루어지려면 자율주행차량의 보급이 이루어져야 하며, V2I 통신의 경우 도로 인프라의 첨단화가 필수적이다. 이에 본 연구에서는 자율주행차량의 보급률과 도로 인프라에 따른 자율주행차량의 안전성과 편의성 향상에 대한 인식을 조사하였으며 결과는 Table 5와 같다.
Table 5.
Improvement of safety and convenience of AV through the penetration rate of AV and advanced road infrastructure
자율주행차량의 보급률과 도로 인프라의 첨단화에 대한 자율주행차량의 안전성 및 편의성 향상에 대한 인식은 자율주행차량의 보급률에 따른 안전성 향상에 대한 인식이 가장 높게 나타났지만, 모든 항목이 낮은 결과 값을 보여 응답자들이 V2X 통신에 관한 인지 수준이 낮아서 나타난 결과라고 생각된다.
자율주행차량의 선호 분석
1. 분석의 개요
본 연구에서는 자율주행차량으로 인한 편익에 대한 요소와 우려에 대한 요소, 자율주행차량의 보급률과 도로 인프라의 첨단화로 인한 자율주행차량의 안전성 및 편의성 향상 그리고 고속도로 인프라의 첨단화와 도시부 도로 인프라의 첨단화와 자율주행차량의 보급률을 달리한 SP조사를 통해 자율주행차량에 대한 선호에 대한 모형을 구축하였다. 먼저 설문조사를 통해 조사된 자율주행차량에 대한 편익과 우려에 대해 요인분석을 통해 다양한 편익과 우려에 질문항목들에 공통적인 잠재변수들 한 후 구조방정식모델(SEM)을 적용하여 모형화를 시도하였다.
2. 자율주행차량 선호에 대한 모형
1) 분석 개념도
응답자들의 선호의식에 대한 모형화를 위하여 Figure 2와 같이 개념도를 나타내었으며.
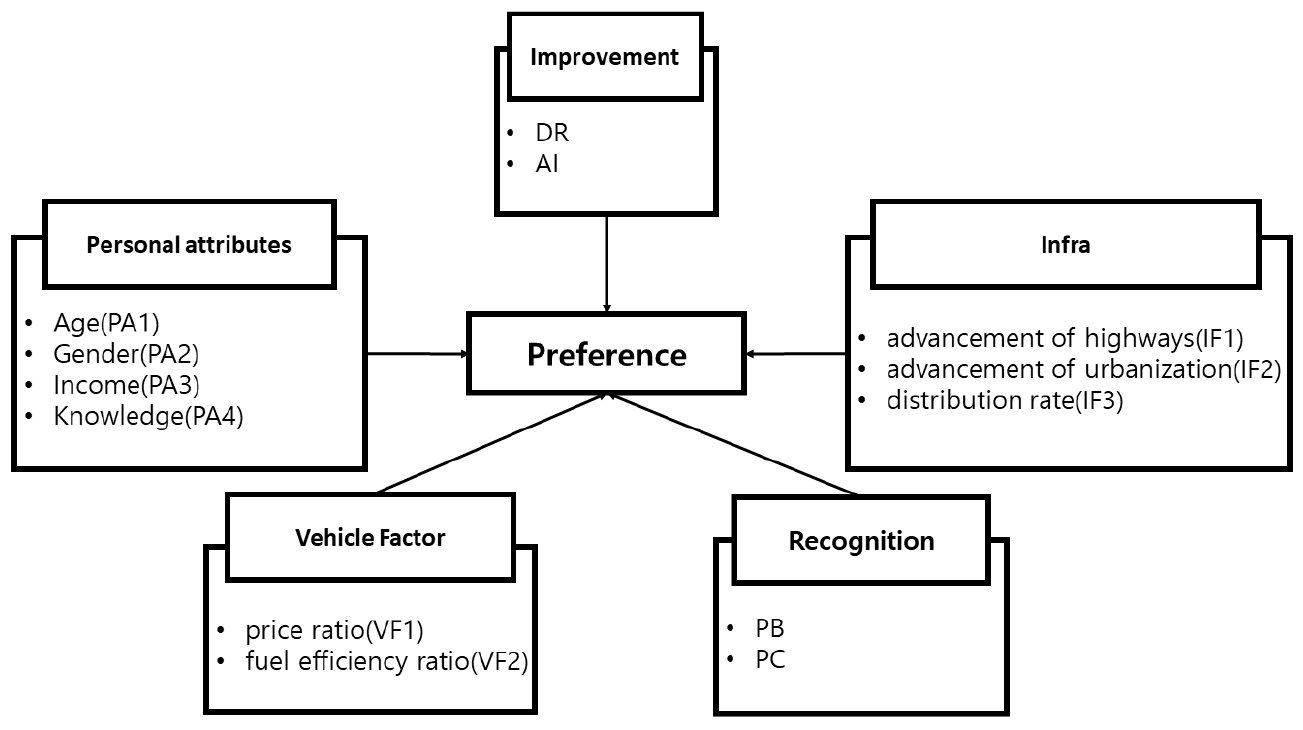
다음과 같이 가정하였다.
H1 : AV의 편익에 대한 응답자들의 인식은 AV의 선호에 긍정적인 영향을 나타낼 것이다.
H2 : AV의 우려에 대한 응답자들의 인식은 AV의 선호에 부정적인 영향을 나타낼 것이다.
H3 : 도로 인프라의 첨단화가 이루어질수록 AV의 선호에 긍정적인 영향을 나타낼 것이다.
H4 : AV의 보급률이 높아짐에 따라 AV의 선호에 긍정적인 영향을 나타낼 것이다.
경로의 경우 자율주행차량에 대한 편익과 우려에 대한 인식이 자율주행차량의 선호에 영향을 끼친다고 선행연구에서는 이야기하고 있다. 본 연구에서는 자율주행차량의 보급률과 도로 인프라의 첨단화에 따른 자율주행차량의 안정성과 편의성의 향상 됨에 따라 자율주행차량의 선호에 어떠한 영향을 미치는지를 분석하기 위하여 H3, H4와 같이 가정하였다.
2) 분석 결과
본 연구에서는 자율주행차량으로 인한 편익과 우려 그리고 도로 인프라의 첨단화와 자율주행차량의 보급률에 따른 자율주행차량의 안전성과 편의성에 대한 응답자들의 인식이 자율주행차량에 대한 선호를 분석하기 위하여 Figure 3과 같이 모델을 구축하였으며, 모델의 적합도는 Table 6과 같다.
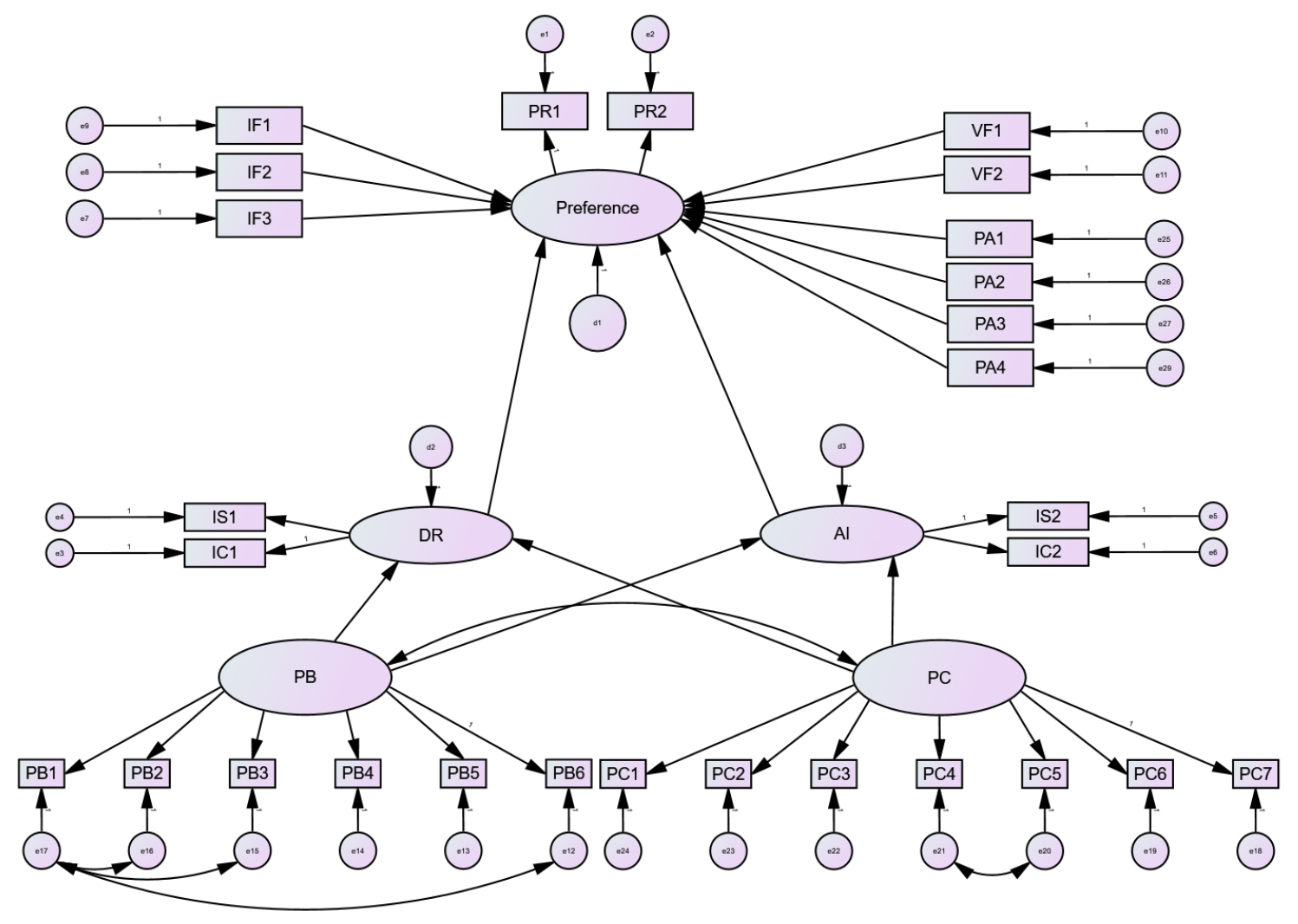
Table 6.
Model 1 fit
Absolute fit index의 경우 AGFI를 제외한 GFI와 RMSEA가 적합한 결과를 보였지만, Relative fit index의 경우 기준에 못 미치는 결과를 보여 위 모델를 수용할 수는 없으며, 모델의 비표준화 계수와 표준화 계수는 Table 7에 나타내었다. 분석의 결과는 자율주행차량에 대한 기대편익은 도로인프라의 첨단화와 자율주행차량 보급률에 따른 주행안전성과 편의성에 긍정적(+)인 영향을 미쳤으며, 우려요인의 경우 기대편익과 반대인 부정적(-)인 영향을 미치는 것으로 결과가 나타났다. 또한 도로인프라의 첨단화와 자율주행차량의 보급률에 따라서 자율주행차량에 대한 선호는 긍정적(+)인 영향을 미치는 결과를 보였으며, SP문항에서 제시된 인프라에 대한 요인들은 긍정적(+)인 영향을 미쳤지만 유의하지 않은 결과를 나타내었다. 또한 일반차량에 대한 자율주행차량의 금액에 대해서는 차량의 가격이 저렴할수록 선호에 부정적(-)인 영향을 미치는 것으로 나타났으며, 이는 자율주행차량의 금액이 낮을수록 자율주행차량을 선호한다는 결과를 보이며, 일반차량에 대한 자율주행차량의 연비의 경우 긍정적(+)인 영향을 미쳤다. 이는 자율주행차량의 연비가 좋을수록 자율주행차량을 선호한다고 할 수 있다. 또한, 개인 속성별로 여성일수록 자율주행차량에 대해 인지수준이 낮을수록 자율주행차량을 선호하는 것으로 나타났으며, 소득의 경우 자율주행차량에 대한 선호에 긍정적(+)인 영향을 미치며, 높은 소득의 응답자가 자율주행차량을 더욱 선호하는 결과를 보였다. 연령의 경우 부정적(-)인 영향을 보여 나이가 어릴수록 선호를 하지만 유의하지 않은 결과를 보였다.
Table 7.
Model1 estimate
|
Unstandardized estimate | P |
Standardized estimate | |||
| DR | ← | PB | 1.035 | *** | 0.854 |
| AI | ← | PB | 0.893 | *** | 0.698 |
| AI | ← | PC | -0.244 | *** | -0.235 |
| DR | ← | PC | -0.102 | *** | -0.104 |
| Preference | ← | IF1 | 0.071 | 0.145 | 0.039 |
| Preference | ← | IF2 | 0.010 | 0.870 | 0.004 |
| Preference | ← | IF3 | 0.023 | 0.732 | 0.009 |
| Preference | ← | VF1 | -0.544 | 0.039 | -0.056 |
| Preference | ← | VF2 | 0.099 | 0.030 | 0.059 |
| Preference | ← | DR | 0.069 | 0.133 | 0.095 |
| Preference | ← | AI | 0.169 | *** | 0.245 |
| Preference | ← | PA1 | -0.062 | 0.040 | -0.056 |
| Preference | ← | PA2 | -0.001 | 0.200 | -0.034 |
| Preference | ← | PA3 | 0.012 | 0.035 | 0.057 |
| Preference | ← | PA4 | -0.046 | 0.028 | -0.060 |
| IC1 | ← | DR | 1.000 | 0.791 | |
| IS1 | ← | DR | 0.921 | *** | 0.760 |
| IS2 | ← | AI | 1.000 | 0.831 | |
| IC2 | ← | AI | 1.023 | *** | 0.846 |
| PB6 | ← | PB | 1.000 | 0.613 | |
| PB5 | ← | PB | 1.038 | *** | 0.664 |
| PB4 | ← | PB | 0.703 | *** | 0.455 |
| PB3 | ← | PB | 1.245 | *** | 0.753 |
| PB2 | ← | PB | 0.830 | *** | 0.528 |
| PB1 | ← | PB | 0.872 | *** | 0.558 |
| PC7 | ← | PC | 1.000 | 0.755 | |
| PC6 | ← | PC | 0.923 | *** | 0.739 |
| PC5 | ← | PC | 0.903 | *** | 0.702 |
| PC4 | ← | PC | 0.846 | *** | 0.709 |
| PC3 | ← | PC | 0.841 | *** | 0.651 |
| PC2 | ← | PC | 0.985 | *** | 0.743 |
| PC1 | ← | PC | 1.063 | *** | 0.789 |
| PR1 | ← | Preference | 1.000 | 0.512 | |
| PR2 | ← | Preference | 1.610 | *** | 0.780 |
위의 모델에서 유의하지 않은 결과 값과 모델의 적합도 부족으로 인하여 모델을 Figure 4와 같이 수정하였으며, 모델의 적합도는 Table 8과 같다.
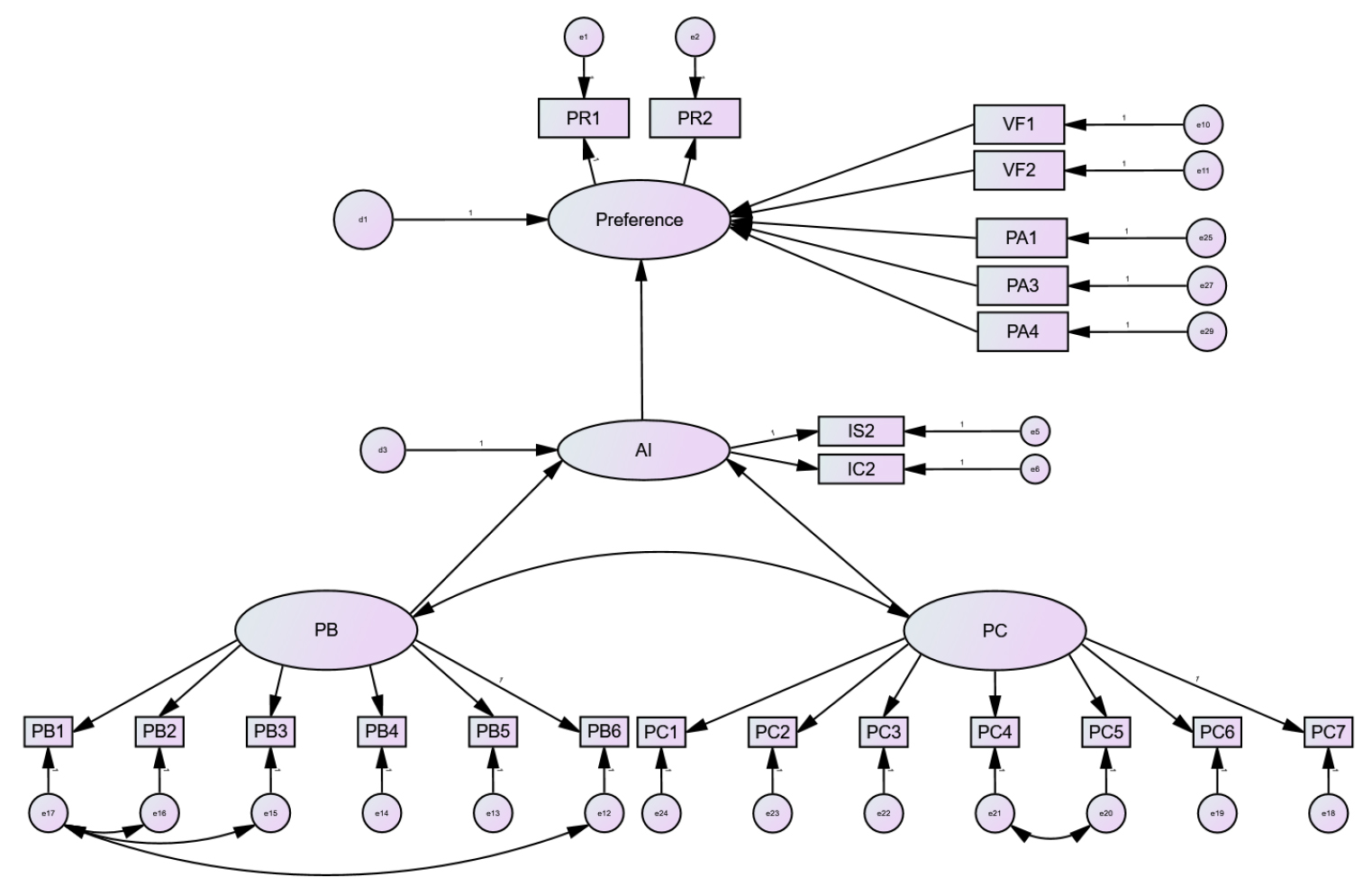
Table 8.
Model 2 fit
모든 모델의 적합도를 만족하지 못하였지만, Absolute fit index의 경우는 모든 적합도를 만족시켰으며, Relative fit index의 경우에 CFI가 적합한 결과 값을 나타내어 위 모델은 수용이 가능하다고 할 수 있다. 위 모델의 분석 결과는 Table 9에 나타내었다.
Table 9.
Model 2 estimate
|
Unstandardized estimate | P |
Standardized estimate | |||
| AI | ← | PB | 0.584 | *** | 0.503 |
| AI | ← | PC | -0.381 | *** | -0.363 |
| Preference | ← | VF1 | -0.584 | 0.030 | -0.059 |
| Preference | ← | VF2 | 0.094 | 0.044 | 0.055 |
| Preference | ← | AI | 0.233 | *** | 0.336 |
| Preference | ← | PA1 | -0.058 | 0.058 | -0.052 |
| Preference | ← | PA3 | 0.013 | 0.019 | 0.065 |
| Preference | ← | PA4 | -0.047 | 0.028 | -0.060 |
| IS2 | ← | AI | 1.000 | 0.841 | |
| IC2 | ← | AI | 0.999 | *** | 0.836 |
| PB6 | ← | PB | 1.000 | 0.685 | |
| PB5 | ← | PB | 1.055 | *** | 0.753 |
| PB4 | ← | PB | 0.642 | *** | 0.464 |
| PB3 | ← | PB | 1.109 | *** | 0.750 |
| PB2 | ← | PB | 0.727 | *** | 0.517 |
| PB1 | ← | PB | 0.752 | *** | 0.537 |
| PC7 | ← | PC | 1.000 | 0.756 | |
| PC6 | ← | PC | 0.921 | *** | 0.738 |
| PC5 | ← | PC | 0.903 | *** | 0.703 |
| PC4 | ← | PC | 0.846 | *** | 0.709 |
| PC3 | ← | PC | 0.843 | *** | 0.653 |
| PC2 | ← | PC | 0.983 | *** | 0.742 |
| PC1 | ← | PC | 1.061 | *** | 0.789 |
| PR1 | ← | Preference | 1.000 | 0.520 | |
| PR2 | ← | Preference | 1.569 | *** | 0.771 |
| PC7 | ← | PC | 1.000 | 0.755 | |
Table 9에서 보는 바와 같이 PA1(P<0.1로 유의함)을 제외한 모든 계수가 P<0.05로 모두 유의한 결과를 보였다. 자율주행차량의 기대 편익은 자율주행차량을 이용하면서 기타 업무 가능, 도로의 혼잡도 감소, 자율주행차량을 이용하면서 여가 활동 가능, 사고 건수의 감소, 사고의 심각도 감소, 피로도 감소 순으로 설명력을 보였으며. 우려 사항의 경우 시스템의 오류, 돌발상황시 대처, 시스템의 보안, 기상악화 시 자율주행기능의 저하, 일반차량과의 사고, 보행자 및 자전거와의 사고, 개인정보의 유출 순으로 설명력을 보였다. 자율주행차량에 대한 기대편익은 도로의 인프라의 첨단화로 인한 자율주행차량의 주행 안전성과 편의성 향상에 긍정적(+)인 영향을 미치며, 우려사항의 경우 부정적(-)인 영향을 미치는 것으로 나타났다. 또한 자율주행차량에 대한 선호에 대해서는 일반차량에 대한 자율주행차량의 금액의 경우 부정적(-)인 결과를 나타내어 자율주행차량의 가격이 저렴할수록 자율주행차량의 선호에 긍정적인 영향을 미치며, 일반차량에 대한 자율주행차량의 연비의 경우 긍정적(+)인 영향을 보여 자율주행차량의 연비가 좋을수록 자율주행차량에 대한 선호에 긍정적인 영향을 미치는 것으로 나타났다. 또한, 도로 인프라의 첨단화로 인한 자율주행차량의 주행 안전성과 편의성 향상요인은 긍정적(+)인 영향을 미쳤으며, 개인속성중에는 성별과 자율주행차량에 대한 인지정도의 경우 부정적(-)인 영향을 미치는 것으로 나타났으며 이는 여성, 자율주행차량에 대한 인지의 정도가 낮을수록 자율주행차량을 선호한다는 것을 나타낸다. 마지막으로 월 소득의 경우 긍정적(+)인 영향을 미치며 소득이 높을수록 자율주행차량을 선호한다는 것으로 나타났다.
결론 및 향후과제
본 연구는 응답자들이 자율주행차량에 대한 편익과 우려 그리고 자율주행차량의 보급률과 도로 인프라의 첨단화로 인한 자율주행차량의 안전성과 편의성의 향상에 대한 응답자들의 인식을 조사하여 자율주행차량의 선호의향에 대해 구조방정식모델을 이용하여 분석하였다.
개인 속성에 따라서는 성별과 자율주행차량에 대한 인지 정도가 부정적인 영향을 미쳤으며, 소득은 긍정적인 영향을 미쳤으며, 이는 남성일수록 자율주행차량에 대해 잘 모를수록, 월 평균 소득이 고소득일수록 자율주행차량을 선호한다고 할 수 있다.
자율주행차량을 이용했을 때 기대하는 편익에 대한 응답자들의 인식은 도로 인프라의 첨단화에 따른 자율주행차량의 안전성 및 편의성 향상에 유의한 긍정적인 결과를 보였으며, 우려의 경우는 부정적인 결과를 보였다.
자율주행차량의 선호 의향에 대해 도로 인프라의 첨단화에 따른 자율주행차량의 안전성 및 편의성 향상은 긍정적인 유의한 결과가 나타났으며, 차량의 가격은 부정적이며, 차량의 연비는 긍정적인 유의한 결과를 나타내었다.
위 결과를 보게 되면 오히려 자율주행차량에 대해 잘 알고 있는 경우 자율주행차량에 대해 선호도가 떨어진다는 결과를 보였다. 이는, 과거 자율주행차량을 이용한 서비스들의 사고로 인한 응답자들의 자율주행차량에 대한 신뢰도가 낮아 나타난 결과로 생각한다.
또한 자율주행차량의 선호에 있어서 우려보단 편익이 자율주행차량을 선호하는 데에 더 큰 영향을 미쳤으며 선행연구에서의 자율주행차량으로 인한 편익보단 우려가 자율주행차량을 선호하는 데에 더 큰 영향 미친다는 연구의(Li et al., 2021) 결과와는 반대의 결과를 보였다. 이는 자율주행차량에 대해 인지에 따라 잘 알고있는 경우에는 자율주행차량에 대한 편익보단 우려에 큰 영향을 미치는 반면 자율주행차량에 대해 잘 알지 못할수록 자율주행차량에 대한 우려보단 편익이 큰 영향을 미쳤다. 하지만 자율주행차량에 대해 잘 모르고 있는 응답자가 더 많은 비중을 차지하여 나타난 결과로 생각한다.
본 연구는 자율주행차량의 상용화에 앞서 자율주행차량에 대한 인식 및 자율주행차량의 보급률과 도로 인프라에 대한 응답자들의 선호의향을 분석하였으며, 자율주행차량의 본격적인 보급이 이루어지려면 자율주행차량에 대한 신뢰도를 상승시켜야 하며, 또한 자율주행차량을 위한 인프라의 첨단화가 이루어져야 한다.
본 연구는 시민들의 자율주행차량의 보급률과 도로 인프라의 첨단화에 인식요인에 의한 자율주행차량의 선호의향을 분석한 연구로서의 선도 역할을 할 것으로 기대한다. 단, 본 연구에는 한계점이 존재한다. 첫 번째로 온라인을 통한 설문조사를 통해 조사가 진행되어 응답자들이 문항에 대한 이해의 어려움이 있을 수 있으며, 이로 인해 설문 응답에 어려움이 있었을 것으로 판단된다. 두 번째로 자율주행차량의 선호에 대해서 응답자들의 개인 속성에 따라 차이를 고려할 필요가 있지만 본 연구에서는 통계적으로 유의하지 않아 고려하지 못하였다. 향후 연구에서는 자율주행차량에 대한 시뮬레이션을 통한 연구를 통해 자율주행차량의 인식에 대한 연구를 수행할 예정이다.
