

서론
정부는 「2050 탄소중립 시나리오」를 마련하여 국가 온실가스 총 배출량의 약 13%(2018년 기준)를 차지하는 수송부문의 온실가스를 2018년 대비 2030년까지 37.8% 감축하고, 2050년까지 90.6% 또는 97.1% 감축을 위해 기존 석유 연료 기반의 수송 시스템을 친환경과 자율주행시스템 중심으로 전환할 계획이다. 또한, 지역 간 균형을 고려한 대중교통 인프라 확대, 교통 수요 관리 강화, 공유차 · 자율주행자동차 · 도심항공교통 등 모빌리티 혁신을 통한 이동 효율화 방안을 마련하였다.
특히, 도로상에 자율주행자동차(Autonomous Vehicle, 이하 AV)의 혼입률(Market Penetration Rate, 이하 MPR)이 증가하면 에너지 소비와 온실 가스 배출이 감소하여, 잠재적 및 환경적으로 큰 이익이 있을 것으로 예측된다(Massar et al., 2021).
더불어, AV의 상용화 시대에는 광역 통행이 증가하고, 주차 수요가 감소하여 도시 공간의 혁신을 촉진하고 도로 수용 능력에 영향을 미칠 것이며(Gruel and Stanford, 2016; Ribeiro-Pimenta et al., 2023), 교통비 절감으로 저소득 가구와 이동성에 제약이 있는 그룹들의 접근성을 높일 수 있을 것으로 예상하는 연구 결과도 다수 존재한다(Bagloee et al., 2016).
한편, AV의 MPR 증가에 따라 기존 도로 공간에 대한 재구조화의 필요성에 대한 연구도 활발하게 이루어지고 있으며, 완전도로(Complete streets) 혹은 Flex Zone의 건설 및 운영을 위한 연구가 대표적이다. 여기서, 완전도로란 자동차뿐만 아니라 대중교통, 자전거, 보행자를 포함한 모든 도로 교통수단 이용자가 안전하게 이용할 수 있는 도로로, 기존의 자동차 중심의 도로를 불완전한 도로로 해석하고 이와 상반되는 뜻으로 설정한 개념이다(Jeong et al., 2011). 향후 개인형 이동수단(Personal Mobility) 등 새로운 교통수단의 이동 편의성도 고려하면서 AV의 수용 능력 향상을 위한 도로 공간의 재구조화 등을 고려한 개념으로, 주로 도심지의 연석 공간을 대상으로 한 Multi-modal & Multi-use가 가능하도록 배치하는 것이 목적인 Flex Zone의 개념과는 다소 상이하다.
나아가, Hui et al.(2018)는 한정된 도로 공간은 모든 요소를 수용할 수 없기에 완전도로를 설계할 때 각 요소의 중요성에 대한 우선순위를 식별하여 설계해야 하며, 완전도로의 목적은 모든 이용자가 도로를 안전하게 이용할 수 있도록 하는 것이지만, 어떤 이용자가 어떻게, 어느 정도까지의 서비스를 받을지는 도로의 맥락에 따라 달라지며, 특정 상황에서는 모든 이동 수단을 수용할 필요가 없을 수 있다고 주장하고 있다. 이는 다양한 유형의 사용자 요구를 균형 있게 맞추는 것이 어려운 문제이며, 한 교통수단 서비스를 개선하면 다른 교통수단의 이용 환경은 열악해질 수 있고, 서비스수준(Level Of Service, 이하 LOS)도 낮아질 수 있다는 의미이다. 따라서, 자동차, 대중교통, 보행자, 자전거 이용자 각각의 교통수단을 고려한 LOS 평가 방법의 적용과 완전도로의 설계 및 평가 시 도로 유형에 따른 우선순위와 성과기준을 설정할 필요가 있다.
본 연구에서는 연속류와 단속류 특성을 가지는 대전-세종간 BRT 도로구간을 대상으로 대중교통 수단전환율과 AV의 MPR 변화에 따른 잉여차로 발생 가능성을 분석하고 동시에 잉여공간에 대한 자산가치를 산정하는 방안 제시를 목적으로 한다. 나아가 전문가 설문조사를 통해 잉여차로에 대한 활용방안도 제안하고자 한다.
선행연구 고찰
AV의 MPR 증가에 따른 교통 환경 변화에 관한 다양한 연구가 국내외에서 이루어지고 있다. AV는 일반자동차에 비해 선두 차량의 제동 및 가 · 감속에 대한 제어 시간과 주행 중의 차간간격을 단축할 수 있으며, 실시간 운행 정보를 통해 군집 주행이 가능함에 따라 지금보다 고밀, 고용량의 환경에서 차량 운행이 가능할 것으로 기대된다(Bagloee et al., 2016; Patel et al., 2016).
나아가, 운전 기술이 필요하지 않기 때문에 신체적, 연령적 제약이 있는 사람들도 이동성을 확보할 수 있으며, 이동 중에 다른 활동을 동시에 수행할 수 있는 장점에 관한 연구(Kolarova et al., 2019; Trommer et al., 2016)와 AV의 통행시간 감소 효과 산정에 대한 연구(Kolarova et al., 2019)도 있으며, 통행 접근성 향상으로 현재보다 더 많은 사용자 그룹이 자동차를 이용하게 됨으로써 발생하는 차량의 통행 거리와 관련된 연구도 있다(Harper et al., 2016; Trommer et al., 2016).
Do and Jeong(2024)은 AV의 MPR 증가에 따른 효과를 분석하기 위하여 VISSIM을 활용하여 AV의 MPR 증가와 교통량 증가에 따라 단속류와 연속류의 환경에서 모두 한계대체율 체감의 법칙(Law of diminishing MRS)이 성립함을 도출하였다. 동시에 MPR 증가에 따라 통행시간이 감소하며, 통행속도는 증가하는 패턴으로, AV의 MPR 증가에 따라 도로 네트워크 성능이 개선되며, 기존 도로의 용량 증가로 인해 잉여차로의 발생 가능성을 제시하였다. Abdeen et al.(2022)는 AV의 MPR 0%를 기준으로 25%, 50%, 75%, 100%로 증가시키면서 평균 통행시간의 차이(Average Vehicle Delay)를 분석하였다. 그 결과, AV의 MPR이 증가할수록 통행지연이 감소하며, AV의 MPR이 증가할수록 통행지연 감소율이 커지는 것을 확인하였다. Do and Chae(2024)는 교통류 특성이 다른 연속류와 단속류 환경을 대상으로 한 AV의 MPR별 효과를 분석하였고, 연속류가 MPR 증가에 따라 통행시간의 감소 및 통행속도의 증가 효과가 점차 증가하는 반면, 단속류는 신호 운영 등의 제약조건으로 인해 MPR 증가에도 불구하고 통행시간 감소 효과는 점차적으로 감소하는 것으로 나타났다.
또한, Kim et al.(2023)는 CAV(Connected and automated vehicles)와 사람이 운전하는 차량(Human-driven vehicles, 이하 HDV)이 혼재된 도로 환경에서 CAV 전용차선(Dedicated lanes, 이하 DL)이 교통 효율성과 안전성에 미치는 영향 평가를 위해 세 가지 시나리오를 설정하였다. 시나리오는 CAV 전용 DL, CAV 및 버스 공유 DL, 기존 버스 전용 DL로 나뉘며, VISSIM의 Wiedemann 99 모델을 활용해 CAV와 HDV의 운전 행동을 차별화해 분석하였다. 각 시나리오에서 CAV MPR에 따른 교통 성능(평균 속도, 평균 주행 시간)과 안전성(Time exposed time- to-collision, TET 및 Time-Integrated Time, TIT)을 분석하였다. 연구 결과, 초기 도입 단계인 MPR 10-30%에서는 CAV와 버스 공유 DL이 가장 효율적이었으며, MPR(40-80%)이 높아지는 혼합 교통 상황에서는 CAV 전용 DL이 더 적합하다는 결론을 도출하였다.
한편, 선진국을 시작으로 세계 여러 국가에서 기존의 자동차 중심 설계로 인해 발생하고 있는 문제를 해결하기 위해, 모든 도로 이용자가 혜택을 받을 수 있는 개념인 완전도로를 정책에 도입하고 있다(Hui et al., 2018; Nordstrom, 2022). 미국 의회에서는 보행자, 자전거 및 대중교통 이용자들이 안전하고 편리하게 이동할 수 있도록 완전도로법 「Complete Street Act of 2009」을 처음 도입했으며, 이는 전통적인 자동차 중심도로 설계 방식의 근본적인 변화를 목적으로 한다(Gregg and Hess, 2019). 여기서 완전도로의 정의는 모든 연령의 보행자, 운전자, 자전거 및 대중교통 이용자가 도로와 가로를 안전하게 이동할 수 있도록 설계, 건설, 운영되는 도로로 모든 잠재적 사용자를 수용하도록 설계된 거리를 의미하며, 특정 교통수단에 우선권을 주지 않고 모든 교통수단에 동등한 접근을 제공하는 도로를 의미한다(Gregg and Hess, 2019; Calloway and Faghri, 2020).
도로의 폭을 줄인 도로 다이어트 등의 도로 재설계를 통해 완전도로 설계에 따라 이동성, 경제성, 공동체 등과 같은 다양한 기능 제공이 가능하며(Nordstrom, 2022), 완전도로의 설계 요소에는 보행 공간 확장, 대기 공간이 있는 횡단보도, 물리적으로 분리된 자전거 및 버스전용도로, 주차 공간, 낮은 주행속도, 조경 등이 포함된다(Nordstrom, 2022). 한편, 시애틀 도시종합계획에서 처음 등장한 Flex zone은 도로 연석공간(Curb Space)의 사용 목적이 시간대와 통과교통량 그리고 주변의 토지이용에 따라 동적으로 변화할 수 있다는 개념으로 제시되었으며, AV 환경 하에서 공간 활용의 효율화를 도모한다는 의미에서는 완전도로와 유사하지만 단속류를 주 대상으로 한다는 의미에서는 차이가 있다(Seattle, 2020; Park et al., 2022).
나아가, 완전도로의 운영으로 도시 지역 경제 활성화, 환경 보호, 공공 공간 창출뿐만 아니라 개인의 이동성, 안전성, 편리성 확보 및 건강 등의 복지 향상에도 이바지한다는 연구(Pursley, 2018)와 샌프란시스코와 LA 등지에서 자전거와 보도 공간이 확보된 완전도로를 구현함으로써 자전거 이용량의 증가와 보행자 관련 사고가 감소하였다는 연구 결과가 있다. 또한, 캘리포니아 교통국(Caltrans)에서는 완전도로를 통해 1인당 포장도로 사용을 감소시킴으로써 인프라 비용과 유지보수비용을 줄일 수 있다는 연구 결과도 있다(National Complete Streets Coalition, Local Government Commission, 2012).
선행연구와의 차별성
대다수의 도로의 자산가치 선행연구는 도로 성능에 대한 가치평가를 주를 이루고 있으며, 최근 모빌리티 기술의 발전 및 정책의 변화로 인해 발생할 수 있는 도로의 잉여 공간을 대상으로 한 자산가치 평가와 활용성에 관한 연구는 거의 없는 것으로 파악되었다.
따라서, 본 연구는 도로용량 증가에 따라 발생할 수 있는 잉여도로 구간의 가치를 산정하는 방법론을 비교하였으며, 이 과정에서 「일반유형자산과 사회기반시설 회계처리지침」의 사회기반시설 토지의 대체적 평가 방법과 Do and Song(2021)의 연구에서 제안한 분석대상지의 도로구간 양측에 위치한 인근 토지의 공시지가를 산술평균하여 계산된 단위면적 당 지가 원단위 값과 토지가격비준표를 이용해 토지 자산가치를 산정하는 방법(Nearly Land Price & Ratio based Method)을 적용하였다. 또한, 국유지의 용도폐지의 경우 감정평가가 수행될 수 있음에 따라 감정평가 지침을 준용한 토지 평가 방법도 적용하여 각각 도출된 값을 비교·분석하였다.
한편, 잉여도로 구간의 활용성에 관한 연구는 단속류 환경을 대상으로 한 도로 연석공간을 토지이용 특성에 따라 동적으로 변화시켜 효율성을 제고하는 Flex Zone에 대한 연구는 일부 있지만, 완전도로를 대상으로 한 활용 방안 연구는 거의 없는 실정이다(Seattle, 2020; Park et al., 2022).
본 연구는 레벨 4이상의 AV의 MPR과 BRT 전용차로로 인한 대중교통 수요 변화를 반영해 BRT 전용차로 구간의 교통 흐름 변화를 분석해 향후 자산가치 산정과 활용 가능한 도로 기능을 제안하고자 한다. 이는 잉여차로 분석 및 도로 공간에 대한 자산가치 산정을 통해 향후 AV 상용화 시대의 도로 기능 활용에 기초자료가 될 것으로 기대된다.
잉여차로 분석과 자산가치 산정
1. 분석 대상지
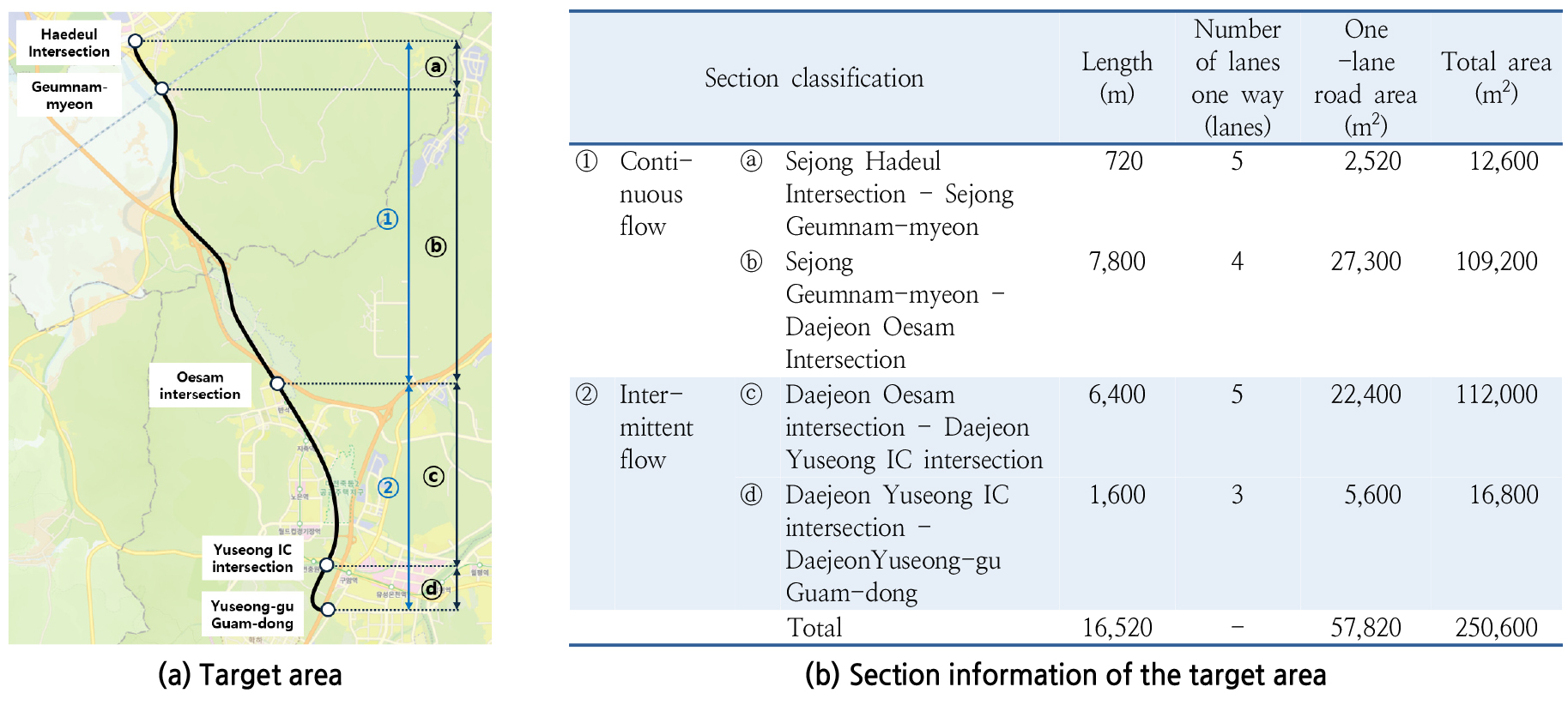
본 연구의 분석대상지는 세종특별자치시 해들교차로-대전광역시 유성구 외삼네거리의 연속류 구간과 대전광역시 유성구 외삼네거리-유성복합터미널(유성생명과학고삼거리)의 단속류 구간을 포함한 대전-세종 구간으로 선정하였다. 2024년 6월 현재 BRT 전용차로는 해들교차로부터 외삼네거리까지 운영 중에 있으며, 2025년 외삼네거리부터 유성IC삼거리를 지나 유성구 구암동까지 BRT전용차로가 연결도로로 준공될 예정이다.
AV 환경에서의 교통류 특성 변화에 관련된 기존 연구가 대부분 연속류와 단속류로 분리된 도로 공간에서 이루어진 한계를 극복하기 위해 단속류 구간과 연속류 구간이 연결되어 있는 환경에서 AV의 MPR 영향을 비교 분석하기 위함이며, 분석 대상 구간의 특성은 Figure 1과 같이 연속류 8.5km 구간과 단속류 8.0km 구간으로 구성되어 있다.
따라서, 본 연구에서는 AV의 MPR과 대중교통 수단전환율에 따른 연속류와 단속류의 잉여차로 발생 조건에 대하여 살펴보기로 한다.
한편, 분석대상지는 대체적으로 부정형지로, 지목은 대부분 ‘도로’ 로 이용 중이며, 일부 ‘전, 답’으로 이용 중이며, 「국토의 계획 및 이용에 관한 법률」 상 용도지역은 ‘도시지역, 제1종 일반주거지역, 제2종 일반주거지역, 생산녹지지역, 자연녹지지역, 보전녹지지역, 계획관리지역, 생산관리지역, 보전관리지역’ 이며, 분석대상지의 대부분의 용도지역은 ‘자연녹지’로 이용 중이며, 대전시 일부 지역의 경우 ‘제1종 일반주거지역, 제2종 일반주거지역, 준주거용지, 상업지역’으로 이용 중이다.
2. 잉여차로 개념과 분석
1) 잉여차로의 개념
본 절에서는 레벨 4 이상 환경에서 AV의 MPR 변화에 따른 잉여차로 발생 가능성을 분석하기 위해 다양한 시뮬레이션을 실시하는 시나리오에 대해 살펴보기로 한다. 여기서 잉여차로(Surplus lane or road section)란 ‘쓰고 난 후 남은 것’이라는 ‘잉여(剩餘)’의 사전적 의미와 ‘사람이 다니는 길 따위와 구분하여 자동차만 다니게 한 길’의 의미인 ‘차로’가 결합된 단어로, AV의 혼입으로 도로 네트워크의 용량이 증가하여 더 이상 도로로 이용하지 않아도 되는 남는 도로 공간을 의미한다. 앞선 선행연구에서 살펴보았듯이 AV는 군집주행으로 짧은 차두거리 유지로 도로용량 극대화를 통한 도로 효율성이 증대할 것이며, AV의 MPR이 증가로 도로용량이 비례적으로 향상되며(Chang and Chen, 2024), AV의 도입으로 용량이 증가하면 적은 차로 수로 많은 교통량을 처리할 수 있을 것으로 예상된다. 따라서, 도로의 통행처리 용량증가는 현재의 도로 공간 내 잉여공간이 발생하게 되어 다른 용도로 활용될 수 있는 공간 확보가 가능할 것으로 판단된다.
2) 장래 교통수요 추정 및 시뮬레이션
분석대상지의 BRT 운영 기반 교통류 특성 변화 모델링에 현실성을 반영하기 위하여 장래 교통수요를 반영하였으며, 이를 위해 거시적 교통수요 프로그램인 TransCAD를 기반으로 분석대상지 주변 장래 개발계획이 반영된 2030년의 장래 교통수요를 분석하였다. 또한, BRT 구간의 AV MPR 및 대중교통 전환수요를 반영하기 위해 미시적 교통 시뮬레이션 프로그램인 VISSIM을 활용하여 구간의 통행시간, 통행속도 및 LOS를 산정하여 잉여차로가 발생할 수 있는 적정 MPR을 도출하였다.
장래 교통수요를 추정하기 위해 한국교통연구원 국가교통DB센터의 대전세종충청권 O/D 및 네트워크 자료를 기반으로 분석을 수행하였다. 통행배정 기본 시간은 교통시설 투자평가지침에서 제시하고 있는 지역별 첨두 및 비첨두 지속시간과 집중률 원단위를 적용해 첨두시 교통량을 도출하였으며, 통행배정은 교통수단을 승용차, 버스, 화물차로 구분하여 다차종으로 배정하는 Multi-class 통행배정방법을 기반으로 수요를 추출하였다.
더불어, 추출된 장래 교통수요를 VISSIM에 적용해 AV 환경을 구현할 수 있는 파라미터를 설정한 후, AV MPR을 25%씩 증가시키면서 시뮬레이션을 실시하였다. 또한, BRT 운영 상태를 기준으로 물리적으로 편도 1차로가 감소되는 시나리오로 설정하였으며, 이를 통해 BRT 도입으로 인해 1차로가 물리적으로 감소하더라도 AV 도입이 가져오는 교통 개선 효과를 평가하고자 하였다.
나아가, 적정 대중교통 수단전환율 설정을 위해 선행연구(Do and Chae, 2024)를 통해 대중교통 수단전환율(Modal Shift)을 5%, 10%로 세분화하여 설정하여, 대중교통으로 수단전환이 발생했을 경우 교통 혼잡 해소 효과 및 AV 도입에 미치는 영향을 파악하기 위해 설정하였다. 따라서, 본 시나리오는 Table 1과 같이 BRT 도입, 물리적 차로 감소, 대중교통으로 수요 전환의 단계적 변화를 통해 자율주행 혼입률(AV MPR)의 증가에 따른 교통 개선 효과를 비교 분석하고자 설정하였다.
Table 1.
Analysis scenario
현재의 교통 특성을 기반으로 AV의 MPR 및 대중교통 수단전환율 변화를 통해 차로 감소 없이 BRT 구간만 운행하였을 때의 LOS와 동일한 효과가 발휘되는 AV의 MPR 및 대중교통 수단전환 수준을 기준 대안(base alternative)으로 먼저 도출하였다.
한편, 본 분석에서 활용된 VISSIM의 Wiedemann 차량 추종 모델은 운전자의 자유 주행, 접근, 추종, 제동의 네 가지 주행 모드를 기반으로 동작한다(Espejel-Garcia et al., 2017). 이 모델은 특정 교통 환경을 반영하기 위해 차두 간격, 속도 등과 같은 중요한 요소를 조정함으로써 모델의 정확성을 높일 수 있으며(Higgs et al., 2011), 다양한 교통 밀도와 운전자 행동 변화를 분석하는 데 유용하다(Motamedidehkordi et al., 2016).
또한, Wiedemann99 모델은 Wiedemann74 모델과 비교해 더욱 세분화된 매개변수 설정이 가능해 차량의 주행 행동을 보다 구체적으로 반영할 수 있다(Aghabayk et al., 2013; Motamedidehkordi et al., 2016).
이에 본 연구에서는 자율주행차의 운전 행태를 구현하기 위해 Wiedemann99 모델을 기반으로 분석을 진행하였다. Wiedemann99 모델은 차량 추종 매개변수(CC0-CC9)를 통해 세부적인 임계값을 설정하며, 주요 매개변수로는 운전자가 전방 차량의 움직임에 반응하는 최소 및 최대 거리, 뒤따르는 차량이 반응하는 거리, 선행 차량에 대한 반응 확률 및 지속 시간, 정적 장애물 접근 시 부드러운 감속 여부, 정적 장애물에 대한 정지거리, 차선 변경 시 정의된 매개변수를 통해 공격성과 협력 여부를 설정할 수 있다(Aghabayk et al., 2013).
따라서, 본 연구에서는 AV가 일반차량보다 외부 반응 환경에 더 민첩하게 대응하여 도로 효율을 높일 수 있는 환경을 구현하기 위해 다음과 같이 설정하였다.
AV의 정지거리는 0.5m로, 선행 및 후행 차량 간 차두 시간은 0.6s로 설정하였으며, 이는 일반차량의 평균차두거리 1.5m와 평균차두시간 0.9s 보다 더 짧게 설정된 값이다. 또한, 돌발 상황 감지 시 후행 차량의 감속 시점은 –6.0m로 정의하였으며, 속도 차이에 대한 허용 범위는 각각 –0.1kps 및 0.1kps로 설정하였고, 추종 과정에서의 실제 가속도는 0.4m/s2, 정지 상태에서 시작 시 원하는 가속도는 3.8m/s2, 그리고 80km/h에서의 원하는 가속도는 1.8m/s2로 설정하였다. 이러한 매개변수를 바탕으로 미래 교통 수요 추정 및 미시적 시뮬레이션 방법론에 대한 분석을 수행하였으며, 구체적인 방법론과 결과는 기존 연구를 참고하기 바란다(Do and Chae, 2024).
3) 잉여차로 산정과 분석
기존 도로 공간에서 잉여차로 혹은 구간이 생성되기 위해서는 AV 기술의 발달로 동일한 교통량을 처리할 수 있는 수용 능력의 향상 및 대중교통으로의 전환 비율의 높아질 경우 가능하다. 다만, 연속류와 단속류와 같이 도로 환경이 상이할 경우 잉여차로가 발생할 수 있는 조건은 달라질 수 있다. 따라서 현재의 용량 및 교통량 등 교통 특성과 연도 특성 등의 환경 하에서 LOS(기준 대안, base line)를 산정하고 잉여차로의 생성 조건에 대한 다양한 시나리오 분석을 통해 살펴보기로 한다.
먼저, 연속류와 단속류 환경에서의 통행속도 특성을 살펴보기로 한다. 연속류 구간(Continuous Flow Section, 이하 CFS)인 해들교차로-외삼네거리의 경우 현재 BRT(중앙전용차로제)로 운영 중이며, 전 구간의 평균 통행속도는 58.4km/h로 LOS B에 해당한다. Figure 2(a)에서 알 수 있는 바와 같이, 동일한 조건에서 MPR을 0%부터 25%씩 증가시킨 시뮬레이션의 결과로 MPR 25%, 50%, 75%, 100%에서 각각 60.16km/h, 65.30km/h, 74.44km/h, 90.95km/h로 통행속도가 증가함을 알 수 있다. 동시에 LOS 기준으로 분석하면 MPR이 50% 이하에서는 B 수준을 유지하지만 75% 이상 조건에서는 A로 향상됨을 알 수 있다.
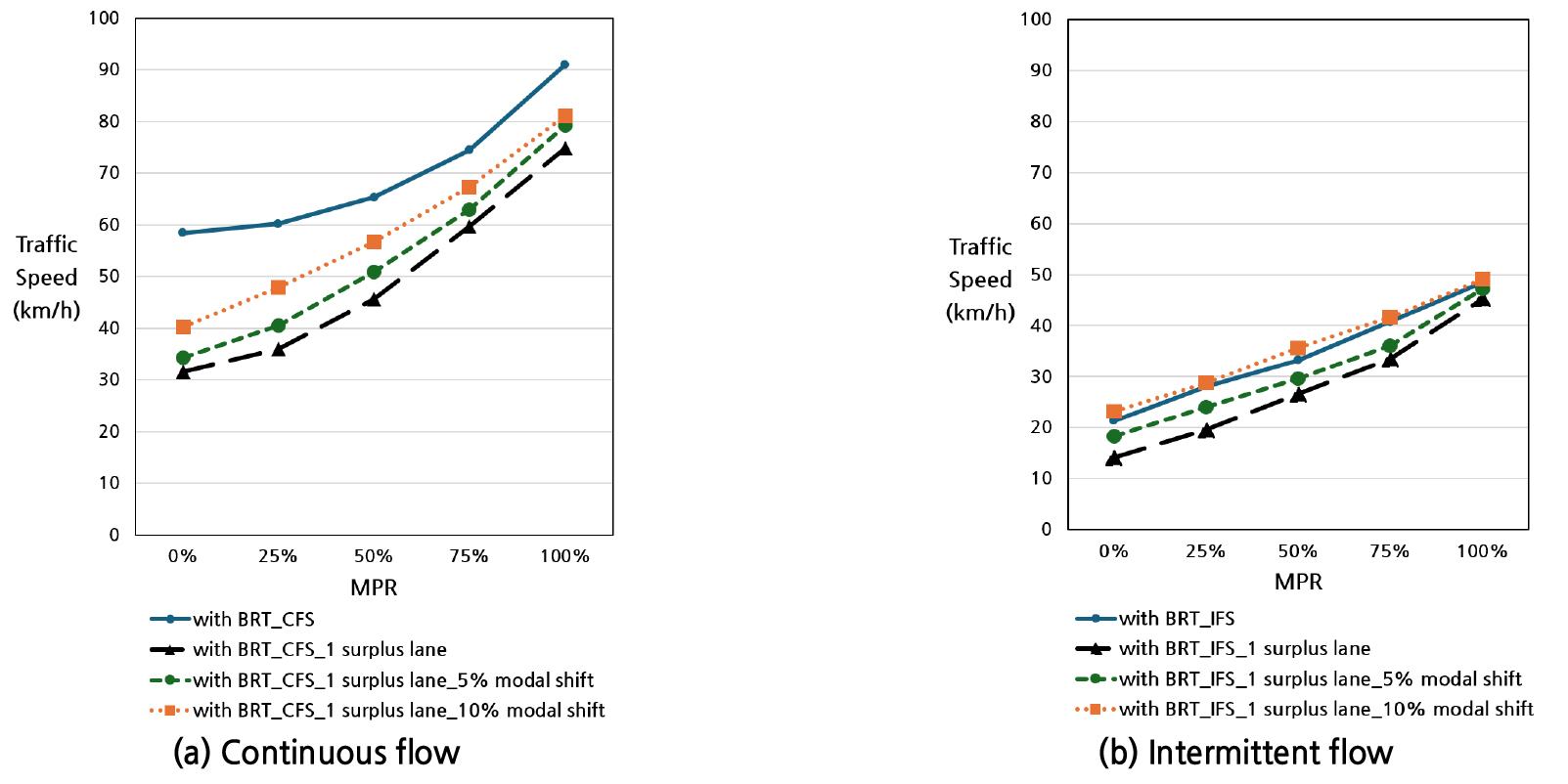
여기서 잉여차로로 1차로를 할당해야 하는 경우(with BRT & 1 lane surplus road)를 가정한 시뮬레이션에서는 AV의 MPR 0%일 때, 31.60km/h로 기준 대안에 비해 45.9%의 통행속도 감소가 발생하며, MPR 75%일 때, 통행속도는 59.71km/h로 LOS B로 회복됨을 알 수 있다.
그리고 잉여차로 1차로 확보와 BRT로 수단전환율이 5%인 경우(with BRT & 1 surplus lane & 5% modal shift)에는 MPR 75%에서 통행속도가 62.89km/h로 LOS B에 도달하여 기준 대안과 동일한 환경으로 복귀함을 확인할 수 있다. 추가로, 수단전환율이 10%일 경우에는 MPR 50%에서 56.66km/h LOS B에 도달함을 알 수 있다.
한편, 단속류 구간(Intermittent flow section, 이하 IFS)인 외삼네거리-유성복합터미널 구간을 BRT로 운영할 경우, 전 구간의 평균 통행속도는 21.36km/h로 LOS D(기준 대안)에 해당한다. Figure 2(b)에서 알 수 있는 바와 같이, 동일한 조건에서 MPR을 0%에서 25%씩 증가시키면서 시뮬레이션을 할 경우, MPR 25%, 50%, 75%, 100%에서 각각 38.08km/h, 33.25km/h, 40.73km/h, 48.56km/h로 통행속도가 증가함을 알 수 있다. 동시에 LOS을 기준으로 분석하면 MPR이 25%이하에서는 D 수준을 유지하지만 50%에서는 LOS가 D, 70% 이상에서는 B로 향상됨을 알 수 있다.
여기서 잉여차로로 1차로를 할당해야 하는 경우(with BRT & 1 surplus lane)를 가정한 시뮬레이션에서는 AV의 MPR 0%일 때, 14.12km/h로 LOS가 D 수준으로 악화되지만 MPR 50%일 때, 통행속도 기준으로 LOS가 D로 회복됨을 알 수 있다.
그리고 잉여차로 1차로 확보와 BRT로의 수단전환율이 5%인 경우(with BRT & 1 surplus lane & 5% modal shift)에는 MPR 25%에서 통행속도가 24.06km/h로 LOS D에 도달하여 기준 대안과 동일한 환경으로 복귀함을 확인할 수 있으며, 수단전환율이 10%일 경우에는 MPR 0%에서도 기준 대안과 동일한 LOS에 도달함을 알 수 있다.
이어서 연속류와 단속류 구간을 대상으로 한 잉여차로 1차로 확보로 인한 통행시간에 미치는 영향을 살펴보기로 한다. 먼저, 연속류 구간에서의 통행시간의 경우, Figure 3(a)에서 알 수 있는 바와 같이, 1차로가 감소하게 된다면, AV의 MPR이 0%일 때, 531.03초에서 971.80초로 약 83% 통행시간이 증가하며, MPR이 증가할수록 통행시간의 증가율은 점점 감소하여 MPR 100%일 때, 339.59초에서 410.26초로 20.8%가 감소하는 것을 알 수 있다. 즉, MPR이 증가할수록 한 차로 폐쇄의 영향이 급격하게 감소함을 확인할 수 있다.
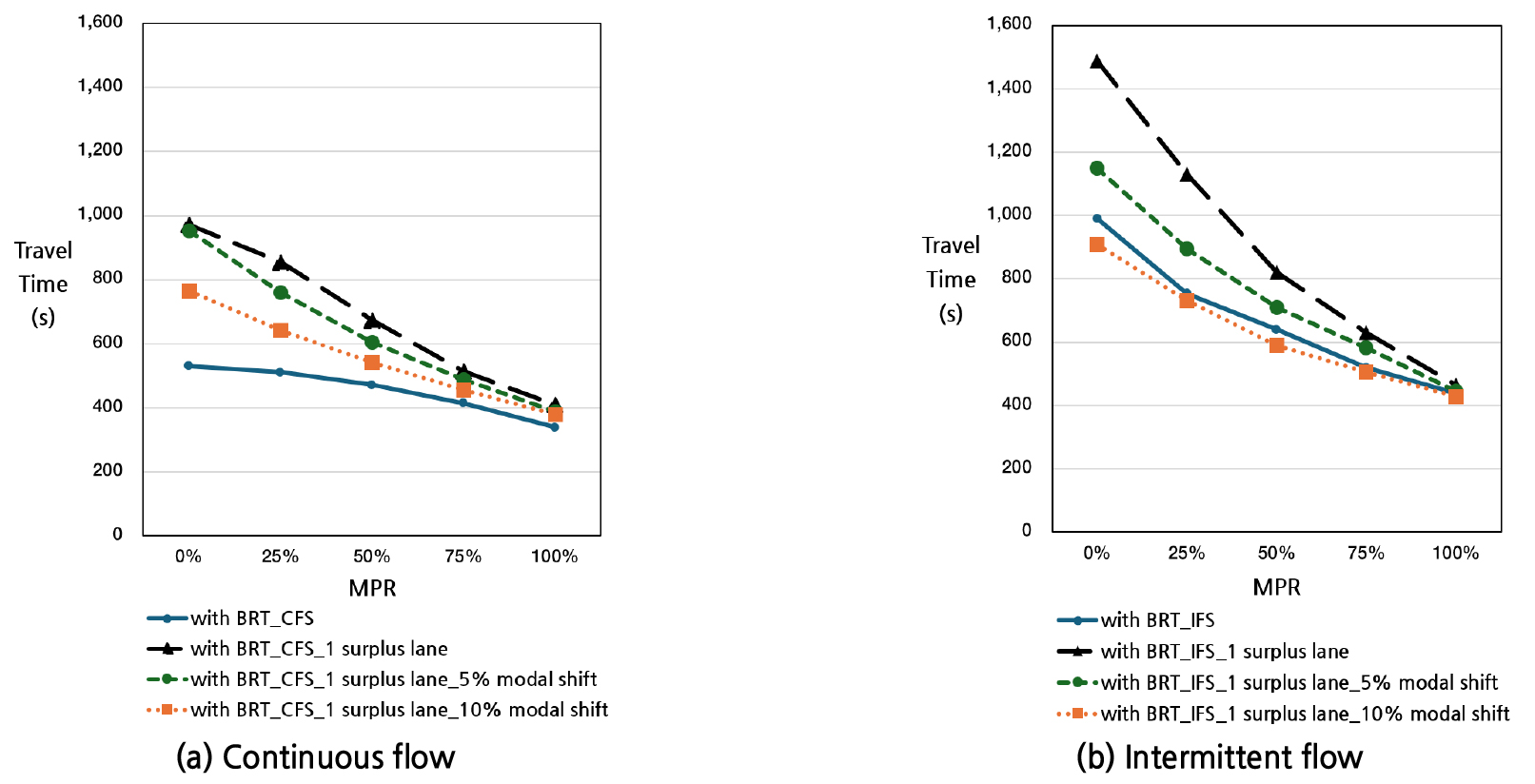
마찬가지로 1차로 감소에 따른 영향이 승용차에서 BRT로의 수단전환율이 5%의 경우에는, MPR 0%에서 기준 대안보다 79%의 통행시간이 증가하지만, MPR이 100%가 되면 기존보다 14.2%의 통행시간 증가에 그쳤다. 수단전환율이 10%인 경우, MPR 0%에서 통행시간은 기준 대안보다 44% 감소하게 되고, MPR 100%가 되었을 때는 통행시간이 11%가 증가하면서 통행시간 증가율까지 감소함을 확인할 수 있다.
다음으로 단속류 구간의 통행시간 변화를 요약하면 Figure 3(b)과 같다. 잉여차로를 위해 1차로가 감소할 경우, 기준 대안이 AV의 MPR 0%일 때, 990.97초와 비교하면 약 50%의 통행시간이 증가하며, 이는 MPR이 증가할수록 증가율은 점점 감소하여 MPR 100%일 때, 437.70초에서 464.79초로 6.18%까지 감소함을 알 수 있다. 그리고, 1차로 감소에 승용차에서 BRT로의 교통수단 전환율이 5%인 경우, 기준 대안보다 16.1%의 통행시간이 증가하지만, MPR이 100%가 되면 기준 대안보다 1.6%의 통행시간 증가에 그치며, MPR이 10%인 경우에는 통행시간이 기준 대안보다 9% 감소하며, MPR이 100%가 되었을 때는 2%의 통행시간이 감소하는 것을 알 수 있다.
연속류와 단속류를 대상으로 한 AV의 영향을 상대 평가하기에는 해당 구간의 최고 및 최적 속도 등의 설정에 크게 좌우되며, 본 연구에서는 기존 연속류 구간과 단속류 구간의 실제 최고 속도가 100km/h와 60km/h의 환경을 반영하여 시뮬레이션 환경을 설정하였음을 밝힌다.
Table 2에는 다양한 시나리오별 AV의 MPR과 잉여차로를 위한 한 차로 배정의 영향을 평균 통행속도 기반으로 연속류와 단속류를 대상으로 분석한 결과를 요약한 것이다. 본 연구에서 수행한 시나리오에서 얻고자 하는 정보는 각 기준 대안(현재의 조건에서의 통행속도 LOS)을 유지하기 위해서 최소 얼마만큼의 MPR 비율과 BRT로의 수단전환이 필요할 것인가라고 할 수 있다.
Table 2.
Results of surplus lane analysis for intermittent and continuous flow (unit : km/h (LOS))
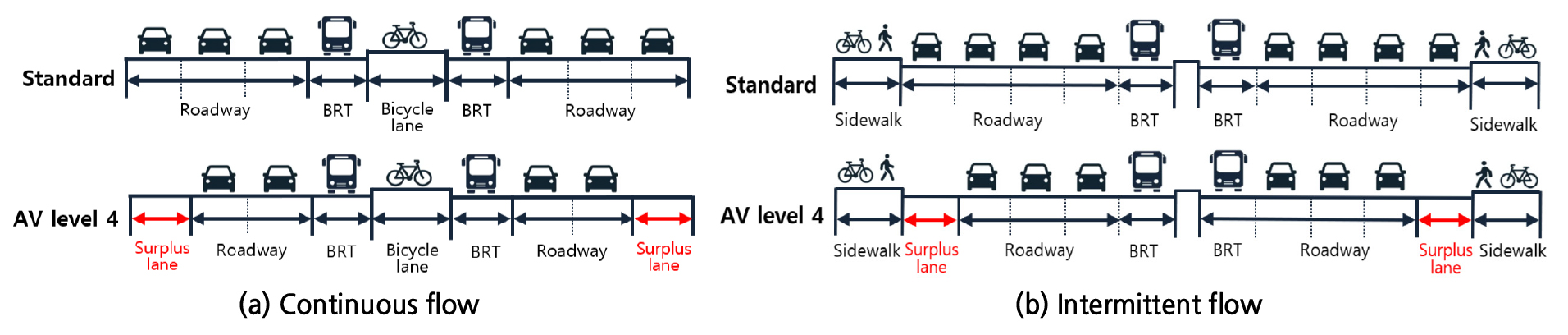
먼저 해들교차로-외삼네거리의 연속류 구간은 현재의 환경에서 즉, MPR 0%에서 구간 평균 통행속도인 58.40km/h(LOS B)를 기준 대안으로 설정하면 잉여차로를 위해 한 차로 감소가 되었을 경우 기준을 만족하는 대안은 1) MPR 75%, 2) MPR 75% & BRT로 수단전환 5%, 3) MPR 50% & 수단전환 10%인 경우로 나타났다. 즉, Figure 4(a)의 도로 단면도에서 알 수 있는 바와 같이 기존 BRT 차로 이외에 3차로 가운데 잉여차로 한 차로를 할당하기 위해서는 위의 조건을 만족해야 함을 의미한다.
한편, 단속류 구간인 외삼네거리-유성복합터미널 구간의 분석 결과, 기준 대안인 통행속도 21.36km/h(LOS D)로 설정하면 잉여차로를 위해 한 차로를 추가 감소시키는 조건을 만족하는 대안은 1) MPR 50%, 2) MPR 25% & BRT로 수단전환 5%, 3) MPR 0% & 수단전환 10%인 경우로 나타났다. 즉, Figure 4(b)의 도로 단면에서 BRT 1차로 이외에 방향별 4차로에서 잉여차로를 운영하기 위해서는 위의 조건을 만족해야 함을 의미한다.
3. 잉여차로의 자산가치 산정
본 절에서는 레벨 4의 AV 환경의 대상 도로구간에서 MPR과 BRT로의 전환비율의 조합에서 잉여차로가 생성되기 위한 조합에 대해 살펴본 결과를 기반으로 Figure 4와 같이 연속류와 단속류의 특성을 보이는 구간에서의 도로 공간의 자산가치를 산정하는 방안을 제시하고자 한다.
「도로법」에 따르면 도로는 차도, 보도, 자전거도로, 측도, 터널, 교량, 육교 등 대통령령으로 정하는 시설로 구성되며, 도로의 부속물을 포함한다. 도로관리청은 도로의 원활한 건설 및 도로의 유지ㆍ관리를 위하여 5년마다 도로의 재산적 가치를 조사ㆍ평가하여 이를 건설ㆍ관리계획에 반영하여야 하고, 관련 자료를 체계적으로 관리하여야 한다. 이 경우, “도로의 재산적 가치에 대한 조사ㆍ평가는 「국가회계법」 제11조에 따른 국가회계기준에 적합하여야 한다” 라고 명시되어 있으며, 「국가회계기준에 관한 규칙」에 따라 사회기반시설로 분류되는 도로는 국가의 기반을 형성하기 위해 대규모 투자로 건설되며, 장기적인 경제적 효과를 나타내는 자산이다.
또한, 「일반유형자산과 사회기반시설 회계처리지침」에 따르면 사회기반시설은 토지, 건물, 구축물, 기타로 구분하며, 토지의 대체적 평가 방법은 본 지침에 기재된 방법을 순차적으로 적용하도록 규정되어 있다. 더불어, 「지방세법」 제109조 제1항에서는 “국가, 지방자치단체, 지방자치단체조합, 외국 정부 및 주한국제기구의 소유에 속하는 재산에 대하여는 재산세를 부과하지 아니한다” 라고 규정하고 있으며, 특정 공유재산에는 재산세가 부과되지 않으며, 도로 및 기타 정부 소유의 재산에도 재산세 부과가 면제된다.
한편, Do and Song(2021)은 대전광역시의 토지 자산가치에 대해 국가회계기준을 적용한 현행 자산평가방법의 한계를 분석하고, 새로운 토지 평가 방법을 제안하였다. 이 연구에서는 도로구간 인근 토지의 공시지가를 산술 평균하여 토지의 자산가치를 산정하는 방법을 제시한 바 있다.
나아가, 도로가 포함된 국유재산이 행정 목적으로 더 이상 사용되지 않는 경우, 「공유재산 및 물품관리법」에 따라 용도폐지로 매각이 가능하며, 이때, 토지가 산정은 「국유재산법 시행령」 제42조에 따라 감정평가법인의 평가액을 기준으로 결정된다. 이때 「감정평가 실무기준」 토지의 감정평가방법은 공시지가기준법을 적용하도록 규정하고 있다. 이를 위해 비교표준지를 선정하며, 적용공시지가를 선택해 지가변동률, 생산자물가상승률, 지역요인과 개별요인 등의 시점수정을 통해 토지의 단가를 결정하도록 규정하고 있다.
분석대상지는 대부분 지목이 ‘도로’로 설정된 부정형지이며, 용도는 ‘자연녹지’로 이용되고 있다. Figure 4와 같이 맨 바깥 차로에 할당될 잉여차로에 대한 자산가치 산정에 관한 연구는 거의 수행되지 않았지만, 회계학 혹은 토지 보상 등의 분야에서 일부 이루어지고 있는 실정이다. 그러나 AV 시대에 공간의 재구조화 등에 대비한 가치평가 연구는 필요성이 대두되고 있으며, 고속도로의 잉여부지 혹은 차로 등의 재활용 등과 관련된 연구도 국내외에서 이루어지고 있지만 평가 방법에 따라 가치의 정량적인 값의 크기에는 상당한 차이가 있다.
본 연구에서는 4가지 방법을 이용하여 도로구간의 자산가치를 산정하고 그 값의 의미에 대해 살펴보기로 한다. 먼저, 1) 공시지가를 기반으로 재평가하는 방법으로 토지가격 산정을 회계처리지침의 대체적 토지 자산가치에서 제시하고 있는 재평가기준일 현재 결정ㆍ공시된 「부동산 가격공시에 관한 법률」에 의한 공시지가를 재평가금액으로 산정하는 방법인데 도로의 경우 재평가 아니할 수 있다는 지침에 의해 대부분 도로의 경우 공시지가를 산정하지 않고 있어 분석에서 제외하였다.
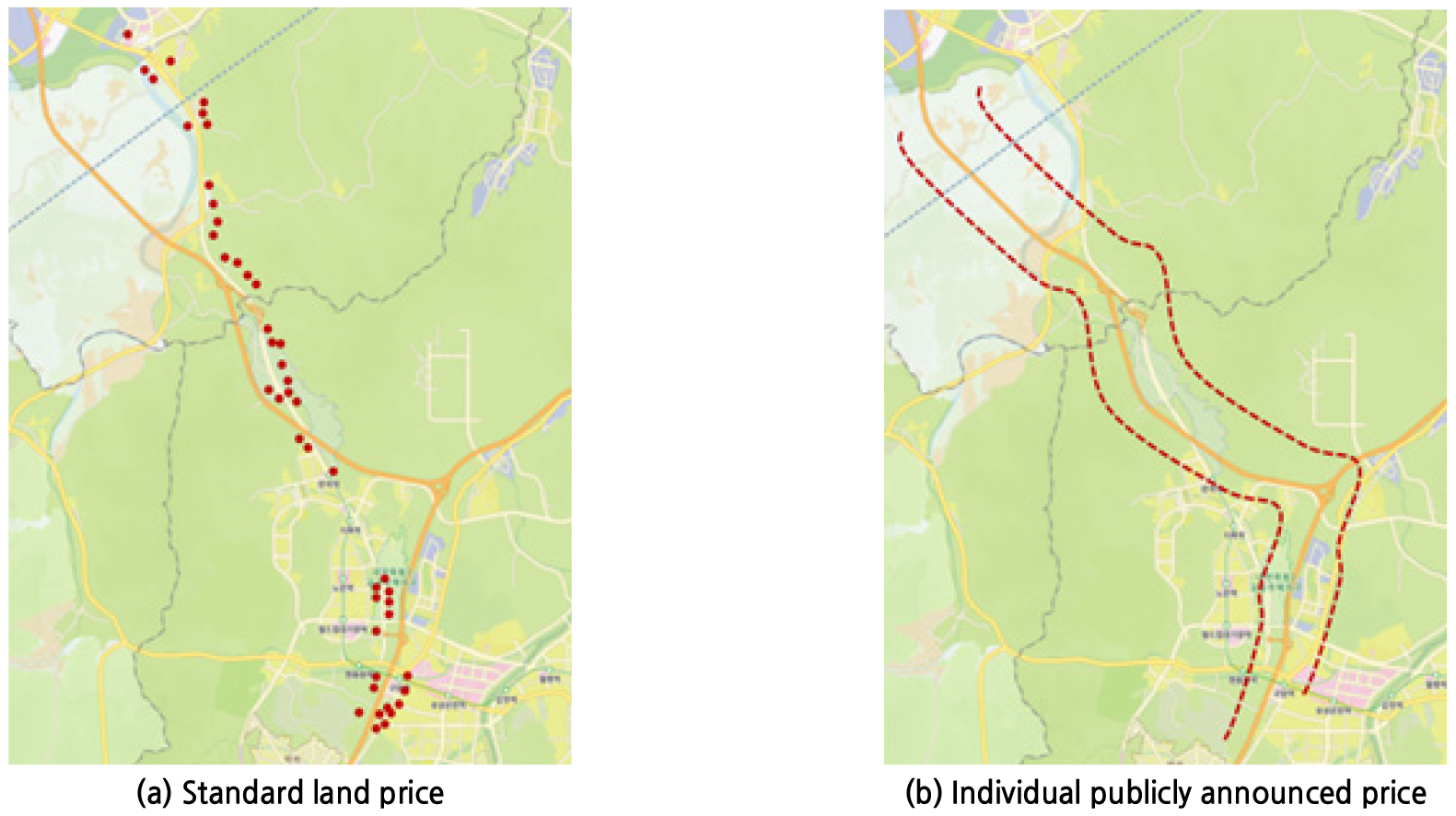
2) 두 번째 방법은 재평가기준일에 공시지가가 없는 경우, 토지 인근 표준지공시지가에 토지가격비준표를 적용할 수 있으며, 토지가격비준표는 Table 3과 같다. Figure 5(a)에서 알 수 있는 바와 같이, 대상 도로구간의 경우 46개 표준지 공시지가의 데이터 활용이 가능하였으며, 표준지 공시지가의 평균 금액인 732,369원/m2에 Table 3의 가격배율 ‘일반’에 해당하는 0.33을 적용할 경우, 대상지 도로에 적용되는 공시지 원단위는 241,682원/m2로 도출되었다. 따라서 대상 구간의 1차로당 면적은 57,820m2로 1차로 잉여차로의 자산가치 산정 결과 약 139억 원으로 산정되었다.
3) 세 번째 방법은 기존 연구인 Do and Song(2021)에서 제안하고 있는 대상지 인근 개별공시지가 산술평균한 방법을 적용할 경우 분석대상지 도로 양측 토지의 82개 토지의 개별공시지가를 산술평균한 지가는 594,879원/m2로 Table 3의 주거 및 상업지역의 가격배율인 ‘일반’인 0.33을 적용한 결과, 대상지 도로에 적용되는 공시지가 원단위는 196,310원/m2로 나타났다. 따라서 원단위를 적용한 1차로 잉여차로 자산가치는 약 113억 원으로 도출되었다.
마지막으로 4) 「감정평가 실무기준」 토지의 감정평가방법의 경우, 분석대상지의 형상 및 이용 상황, 토지이용계획사항을 파악해 비교표준지를 선정해야 하며, 해당 과정을 산식으로 표현하면 Equation 1과 Equation 2와 같다.
Table 3.
Land price standard
따라서, 「감정평가에 관한 규칙」 제14조에 따라 인근지역에 있는 표준지 중에서 대상토지와 용도지역·이용 상황·주변 환경 등이 같거나 비슷한 비교표준지의 공시지가를 기준으로 공시기준일로부터 기준시점까지의 지가변동률로 세종과 대전의 시점수정한 후, 분석대상토지와 표준지의 지역요인, 개별요인 및 그 밖의 요인 등에 대한 분석 후 필요한 조정을 하여 대상토지의 가액을 산정하는 공시지가기준법을 적용하였다. 또한, 비교표준지는 분석대상지의 인근지역에 위치하여 지역요인은 상호 대등하며, 개별요인 또한 비교표준지 인근으로 대등하다고 판단하여 이를 적용하여 산정하였다. 이에 관한 결과, 약 343억 원으로 산정되어 회계처리지침의 토지의 대체적 평가방법으로 산정된 약 139억 원과 113억 원에 비해 다소 높게 산정됐음을 알 수 있었다.
이와 같은 결과는 「공익사업을 위한 토지 등의 취득 및 보상에 관한 법률 시행규칙」 제68조 제1항에 의하면 2인 이상 감정평가업자에게 감정평가를 의뢰하게 되어 있으며, 제2항에 의해 토지소유자가 요청하는 경우에는 그 외 1명의 감정평가업자를 추가하도록 되어있는데, 이는 3명의 감정평가업자가 동일한 부동산에 대해 감정평가를 시행하도록 규정하고 있기 때문에 평가자의 주관적 의견 및 감정평가 절차의 신뢰성 등의 이슈가 있다(Kim, 2008).
따라서, 기존 도로로 활용되는 공간을 대상으로 한 자산가치의 평가는 그 방법에 따라 상이하게 평가되며, 기존 회계처리지침의 토지의 대체적 평가방법에 비해 보상을 위한 목적으로 재평가하는 경우에는 다소 주관적인 의견이 반영될 소지가 있으며, 무엇보다도 감정평가는 해당 용지가 도로로 이용되는 토지를 용도폐지하고 다른 용도지역으로 변경할 때 감정하는 평가 방법임을 감안하면 상대적으로 과대 추정될 가능성이 있음을 알 수 있다. 요약하면, 잉여차로의 경우 그 공간의 활용성과 목적에 따라 자산의 가치는 상이해질 수 있다는 점을 감안하여 정책수립에 활용할 것을 제안한다.
잉여차로 활용방안
본 절에서는 AV와 대중교통 수단전환율에 따라 발생한 잉여차로의 활용방안 및 우선순위 도출을 위한 과정 및 결과를 제시하고자 한다. 먼저, 도시교통 및 건설환경 분야 전문가 18명을 대상으로 잉여차로의 정의와 도출 과정을 설명하고 활용방안 및 우선순위 산정을 위한 순위형 설문조사를 수행하였다. 이때 설문조사는 연속류와 단속류 환경에서 활용 가능한 도로 기능 및 활용성의 우선순위를 파악하기 위함이므로 설문 항목도 연속류와 단속류로 구분하여 평가할 수 있도록 설계하였다.
또한, 잉여차로 활용의 우선순위 평가 항목은 AV의 도입으로 도로 용량이 증가해 발생한 잉여차로를 완전도로 개념을 적용해 공간을 재구성할 수 있으므로, 완전도로 설계 지침에서 제시하는 활용 방안을 바탕으로 평가 항목을 구성하였다. 완전도로 설계 지침은 미국, 영국, 캐나다 등 여러 국가에서 제시하는 설계 매뉴얼 및 가이드라인으로, 승용차 운전자, 대중교통 이용자, 자전거 이용자, 보행자 등 다양한 도로 이용자가 안전하고 효율적으로 도로를 사용할 수 있도록 가로 설계 방법을 제안하고 있다(Hamliton, 2022; London, 2018). 주요 설계 요소로는 보행자 및 자전거를 위한 물리적으로 분리된 안전한 공간(London, 2018), 가로수 및 조경 등 녹지 공간(Los Angeles, 2018; New Haven, 2010) 등이 있으며, 필요에 따라 탄력적으로 주·정차가 허용된 Flex Zone(플렉스 존)으로 활용할 수 있다고 제안하고 있다(Park et al., 2022). 따라서, 완전도로의 취지에 부합하는 잉여차로의 용도에 대한 설문 항목은 Table 4와 같이 용도를 구분하였으며, 1) 탄력적인 주/정차 공간, 2) 자전거 및 개인형 이동장치(Personal Mobility, PM)를 위한 공간, 3) 보행 공간, 그리고 4) 녹지 공간으로 구분하여 4점 척도로 우선순위를 파악하였다.
여기서, 탄력적인 주/정차 공간은 단속류 구간의 경우 연석 공간의 Flex zone과 유사한 개념의 용도로 활용 가능한 공간이며, 연속류 구간의 경우 공유 AV들, 공사 및 조업 차량들의 임시 주/정차 공간으로 활용을 염두에 둔 공간이라 할 수 있다.
설문조사의 결과를 간단하게 요약하면 연속류의 경우, 전체 응답자의 33%가 자전거 및 개인형 이동장치 전용차로를 가장 높은 우선순위로 응답하였으며, 탄력적 주/정차 공간, 녹지 공간(24%) 및 보행 공간(18%)이 그 뒤를 이었다. 한편, 단속류의 환경에서는 자전거 및 개인형 이동장치를 위한 공간이 전체의 32%로 가장 높게 집계되었으며, 탄력적 주/정차 공간(28%), 보행 공간(27%), 녹지 공간(13%) 순으로 응답되었다.
Table 4.
Classification and detailed description of possible uses for surplus roads
잉여차로의 활용성을 묻는 전문가 설문에서 연속류와 단속류의 환경에서 도두 자전거 및 개인형 이동장치를 위한 전용 공간으로 활용하자고 나타났는데 이는 향후 개인형 이동장치의 비율이 증가할 것이라는 예상도 반영되었지만, 차량뿐만 아니라 보행자와 PM의 공간 분리를 통해 안전성을 제고하자는 의견이 반영되었다고 판단된다.
연속류와 단속류 모두 탄력적 주/정차 공간으로 활용이 두 번째로 높은 순위로 응답된 것은 향후 공유자율주행자동차의 임시 주/정차 및 환승 대기 공간, 공사 차량 및 조업 주차 공간 등으로 활용해 미래의 공유자율주행시대를 대비하는 공간이 필요하다는 점을 시사한다.
반면, 단속류에 비해 연속류에서는 녹지 공간이 보행 공간보다 더 중요하다고 응답하였으며, 단속류의 환경에는 녹지 공간보다 보행 공간의 추가 확보가 더 중요하다고 응답하였음을 알 수 있으며, 이는 다양한 토지이용이 혼재하고 있는 단속류의 환경에서는 보행 공간의 추가 확보를 통해 차량으로부터의 안전성을 확보하는 것이 중요하다는 점을 시사하고 있으며, 연속류의 환경에서는 상대적으로 높은 차량 속도로 인해 발생할 수 있는 사고에 대비한 차량의 안전성 향상과 개인형 이동수단과의 분리를 위한 녹지 공간이 더 중요하다고 응답하였다고 판단된다.
향후 전문가의 의견을 고려하여 완전도로의 공간 배분을 위한 공간 재구조화 설계 및 잉여차로의 활용 방안 마련 기초자료로 활용할 수 있을 것으로 판단된다.
결론 및 향후 연구
본 연구는 BRT 전용차로 구간에서 레벨 4이상의 AV의 MPR 및 BRT로의 수단전환율의 변화에 따른 잉여차로 확보의 조건을 다양한 시나리오 분석을 통해 분석하였으며, 이렇게 확보된 잉여차로 공간을 대상으로 한 회계학적 개념 기반의 자산가치 산정 및 해석하는 방안을 제시하였다. 나아가 전문가 설문조사를 통해 단속류와 연속류의 잉여차로 공간의 활용성에 대해 검토하였다.
먼저, AV의 MPR이 증가할수록 통행속도와 통행시간 등 교통류의 개선이 이루어짐을 확인하였으며, 이 결과는 기존 연구성과와도 정합성을 가진다. 동시에 BRT로의 수단전환이 이루어지게 되면, AV의 MPR이 다소 낮은 수준이라도 잉여차로의 확보에 기여할 수 있다는 것을 확인하였다.
분석 대상 도로 구간을 특정한 장래 수요 추정과 시뮬레이션에 한정된 결과임을 감안하더라도 연속류 구간에서는 AV의 MPR 50%와 BRT로의 10% 수단전환으로 한 차로의 잉여차로가 확보됨을 확인하였으며, MPR 75% 단독으로도 현재의 LOS과 동일한 효과를 볼 수 있음을 확인하였다.
한편, 단속류 구간을 대상으로 한 연구에서는 AV의 MPR 50% 혹은 MPR 25%와 10%의 수단전환율, 혹은 수단전환율이 10%이면 MPR이 0%의 조건에서도 현재 수준의 LOS를 유지하면서 한 차로의 잉여차로를 확보할 수 있음을 알 수 있었다.
한편, 추가로 확보된 잉여차로 공간에 대한 자산가치 평가를 위해 본 연구에서 제시한 방법에 의하면, 표준지공시지가를 활용한 잉여차로 토지가치산정 결과는 약136억 원으로 산정되었으며, 개별공시지가를 활용한 토지가치산정 결과는 약 113억 원 산정되었다. 또한, 감정평가 실무기준에 의한 토지가 산정 결과 343억 원으로 다소 과대 추정되었지만 기존 도로로 이용되는 토지를 다른 용도지역으로 변경할 때 감정하는 평가 방법임을 감안하여 해석할 수 있다.
마지막으로 잉여차로로 재구조화가 가능한 공간을 대상으로 한 완전도로 개념을 기반으로 활용방안 및 우선순위 도출을 위해 전문가 설문조사를 수행한 결과, 연속류와 단속류 모두 자전거 및 개인형 이동장치를 위한 공간으로 활용하는 것이 가장 적합하다고 응답되었으며, 그 다음은 공유자율주행자동차 시대의 대비를 위한 공간으로 탄력적 주/정차 공간으로 운영하는 것이 적절하다는 응답을 확보하였다. 반면, 단속류의 경우 보행공간이 녹지공간보다 중요도가 높게 분석되었으며, 연속류는 녹지공간이 보행공간보다 상대적으로 중요하다고 분석되었다.
이러한 AV 관련 기술발달로 인해 추가로 확보할 수 있는 도로 공간은 미래의 교통류 환경에서 모든 수단 이용자들에 안전하고 효율적인 공간의 배분이 이루어지도록 재구조화되어야 하며, 이렇게 추가로 확보된 공간의 자산가치의 평가는 교통계획 분야의 경제성 분석, 환경성 평가 등에 활용될 수 있을 것으로 기대된다.
향후 연구는 BRT 전용차로 도입에 따른 단속류 구간의 신호교차로에서의 신호연동의 영향과 BRT로의 수단전환에 대한 잠재 수요를 도출하는 분석이 필요하다고 판단된다.
또한, 본 연구에서는 AV 도입의 명확한 효과를 파악하기 위해 시뮬레이션 분석에서 협력주행의 특성인 통신거리, 군집크기, 통신 오류율 등을 고려하지 않았다. 따라서 향후 연구에서는 차량 간 통신 기술의 발전과 교통 관리 시스템 등을 시뮬레이션 파라미터에 포함시켜 적용 범위를 확대할 필요가 있다. 또한, 통신 오류율과 같은 변수를 실험적으로 조정하여 그 영향을 분석하는 것이 중요할 것으로 판단된다.
