

서론
연구 방법론
기존 연구 고찰
1. 자율주행 평가 관련 선행 연구
2. 자율주행 평가 관련 국제표준
3. 기존 연구문헌과의 차별성
제협약 및 운전면허시험
1. 도로교통에 관한 국제협약
2. 운전면허시스템 도로주행 시험항목
도로교통법 구조화를 통한 평가 항목 도출
1. 출발 규칙
2. 주행 규칙
3. 객체 대응
4. 종료 규칙
5. 고속도로 등에서 특별 규칙
6. 교통사고 조치에 대한 규칙
결론 및 향후 연구과제
서론
현재 자율주행 기술은 유럽과 미국이라는 두 개의 축을 중심으로 국제표준이 만들어지고 있으며, 이 중 유럽은 국제연합 경제사회이사회 산하 지역위원회 성격인 유럽경제위원회(ECE, Economic Commission for Europe) 작업 그룹(WP.29) 내의 GRVA(Automated/Autonomous and Connected Vehicles)를 중심으로 UNECE Regulation 157(2021)과 같은 국제표준들이 제정되어 실제 자동차의 형식승인에 적용되고 있다. 우리나라에서도 자동차관리법에서 자율주행자동차 종류를 A, B, C형으로 구분하여 임시운행 허가 시 차로유지, 차로변경, 교통정체, 충돌방지, 최고속도제한 등의 요건에 대해 확인하도록 규정하고 있고 이는 SAE(Society of Automotive Engineers) Level 2&3에 속하는 자율주행에 해당된다.
Christian et al.(2021)의 자율주행차 중요도 분석(Criticality Analysis) 및 검증에서는 자율주행이 SAE Lv.2&3의 비교적 단순한 고속도로 기능에서 Lv.4&5의 고도화된 도시 내 기능 단계로 발전하고 있으며 평가 시나리오 클래스를 정의하기 위해 개방형 컨텍스트를 체계적으로 구성해야 한다고 기술하고 있다.
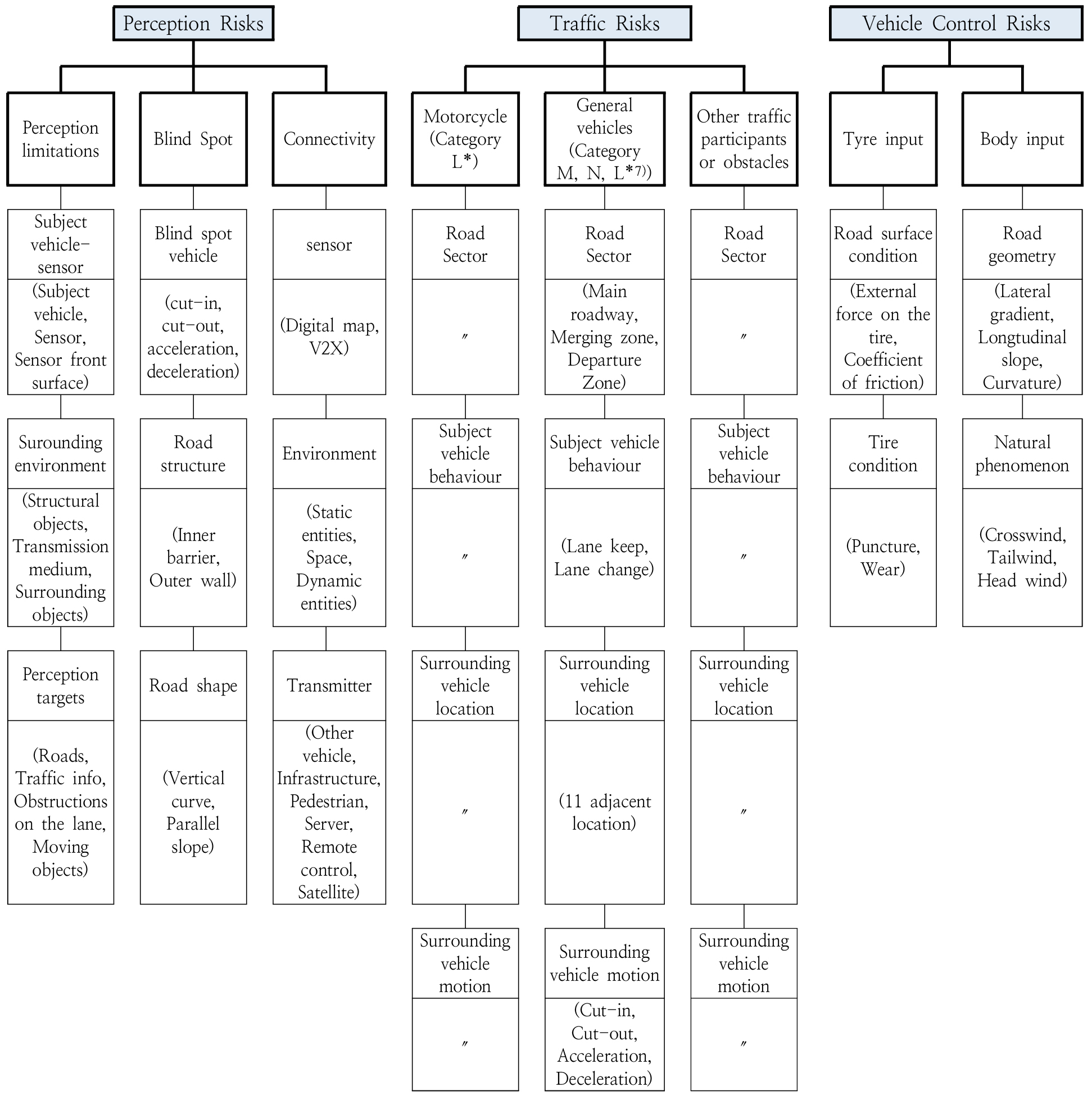
또한, 시나리오 기반 안전 평가 프레임워크에 대한 국제표준인 ISO 34502(2022)에서는 물리적 위험 요인에 대한 시나리오 구조화를 위해 인지, 교통, 차량 제어 세 가지로 분류하여 각각의 평가내용에 상세하게 기술하고 있다. 반면 교통법규와 관련이 높은 동작안전평가에서는 일반적인 통행규칙에 해당하는 안전거리 유지, 충돌 회피, 충돌 완화를 준수하는지 여부로 국한하고 있어 법규 각각의 조항을 바탕으로 하는 세부 평가가 필요한 실정이다. 교통 법규는 국제연합(UN)에서 국가 간 도로교통의 통일성을 위해 1949년, 1968년 두 차례에 걸쳐 만들어진 “도로교통에 관한 국제협약”을 통해 대부분의 국가들이 준수하도록 요구하고 있어 자율주행이 점차 고도화됨에 따라 앞에서 살펴본 자율주행차량의 「위험 기반 안전 평가」와 더불어 「법규 기반 안전 평가」도 중요하게 요구될 수 있기 때문에 이를 위해 선제적으로 물리적 위험 요소와 같은 교통 법규의 준수 요소에 대한 평가항목을 구조화하여 제시하고자 한다.
연구 방법론
자율주행자동차의 교통 법규 준수에 대한 평가를 도입하기 위해 도로교통법에 대한 이해와 구조화를 통한 평가 항목 도출이 필요하다. 우선적으로 기존의 자율주행자동차에 대한 평가와 관련하여 독일의 Lv.3를 위한 PEGASUS 프로젝트의 후속 프로젝트인 Lv.4&5를 위한 VVM(Verification and Validation Methods) 연구 프로젝트 결과물인 Christian et al.(2021) 논문과 이를 바탕으로 제정된 ISO 34502의 방법론을 검토하였다. 또한 기존 위험 요인 중심의 평가와 달리 교통 법규에 대한 평가 방법에 대한 독일 PRORETA5 프로젝트 결과물인 Felix(2023)의 박사 학위 논문을 검토하였다.1)
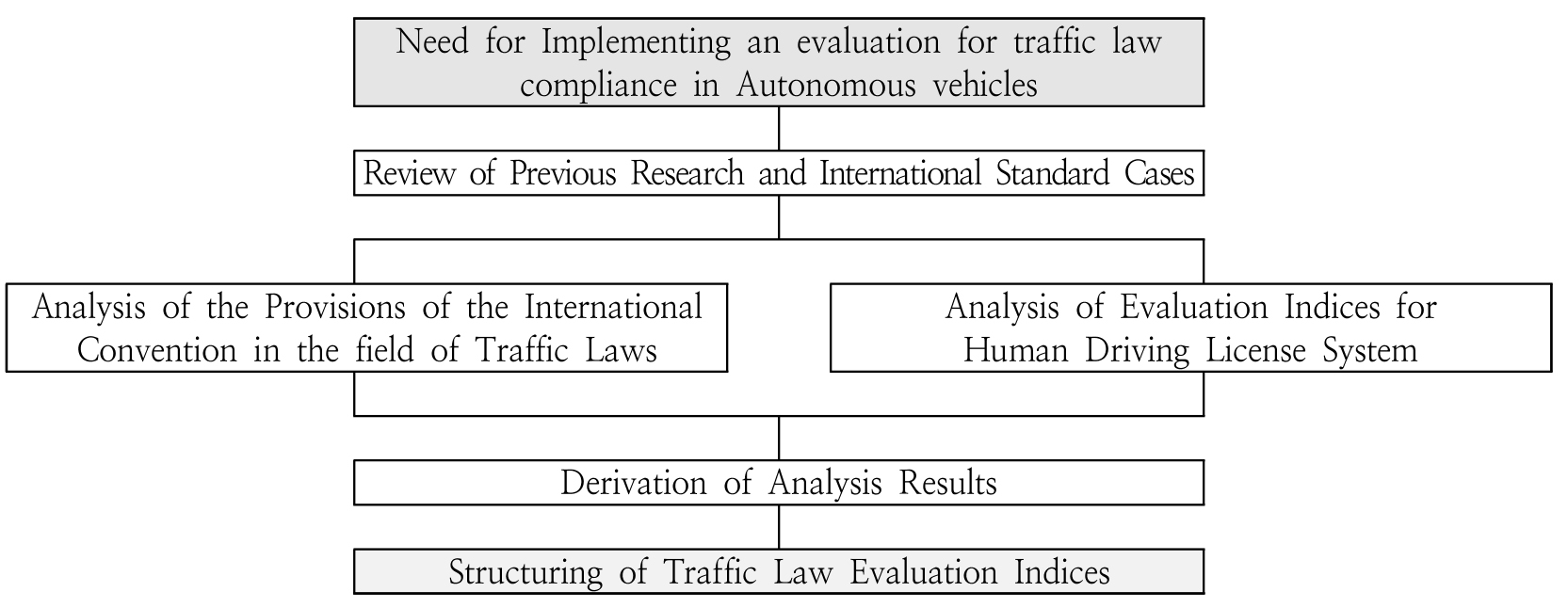
기존 문헌고찰 결과 ISO 34502의 물리적 위험 요인에 대한 구조화가 안전 평가에 대한 전체적인 지침을 제공하는 것과 마찬가지로 교통 법규 준수를 위한 평가항목 구조화를 위해 도로교통법과 국제협약 조항을 분석하여 차이점을 제시하였고, 우리나라에서 시행되고 있는 운전면허시스템의 도로주행시험 평가항목이 직관적으로 이해하기 쉬운 출발, 주행, 종료와 같은 개념을 적용하고 있는 것을 착안하여 구조화를 도출하였다. 연구수행을 위한 방법론은 Figure 1과 같다.
기존 연구 고찰
1. 자율주행 평가 관련 선행 연구
1) Christian et al.(2021):중요도 분석(Criticality analysis)2)
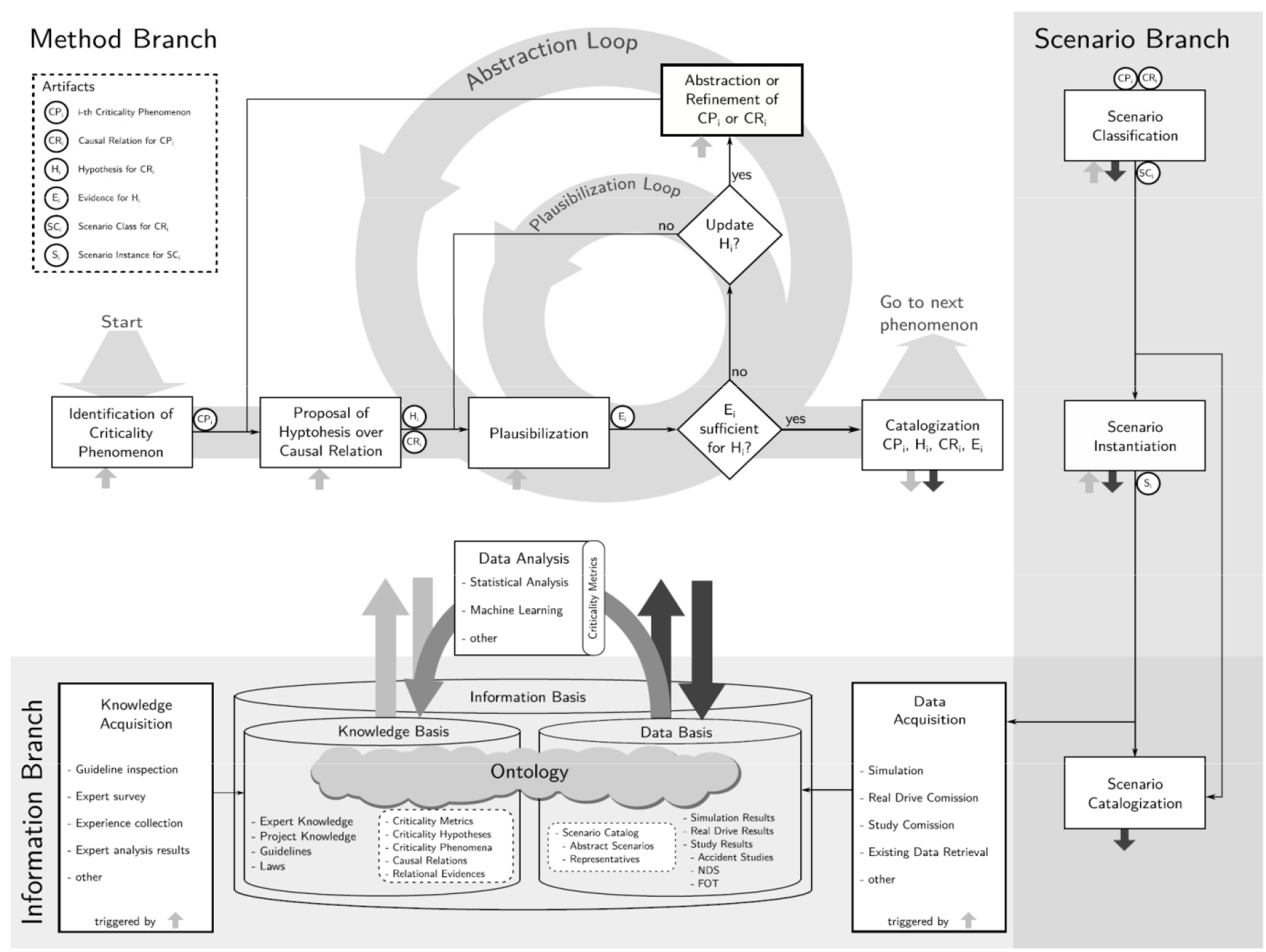
중요도(Criticality)는 교통 상황이 계속될 때 관련 교통 참가자들의 결합된 위험으로 정의되며 중요도 분석에서 제안된 방법은 SAE Lv. 4&5에서 자율주행의 안전한 작동을 목표로 개방형 컨텍스트(open context)3)를 구성하기 위한 청사진을 제공한다. 중요도 분석은 Figure 2와 같이 방법, 정보, 시나리오 분기 등 세 가지 분기로 나뉘며 각 분기는 여러 프로세스 단계로 구성된다. 이 방법을 통해 분석가는 교통 시스템에서 중요도가 발생하는 경우를 식별한 다음 이러한 경우에 대한 안전 원칙과 완화 매커니즘을 설정하기 위해 근본적인 설명을 제공할 수 있다고 기술하고 있다.
중요도 분석의 목표는 기본 구조를 분석하여 자율주행이 운영되는 무한한(∞) 차원의 개방형 컨텍스트를 중요도 현상, 인과 관계, 시나리오 카탈로그 등과 같은 유한한(n) 아티팩트4) 집합에 맵핑하는 것이다.
또한, 이러한 중요도 분석은 국제 표준인 ISO 34502(2022) 시나리오 기반 안전 평가에 반영되어 물리적 원리에 따른 접근법과 더불어 자율주행과 관련된 위험 요소를 식별하는데 사용되고 있다.
2) Felix(2023):교통 법규 준수에 대한 시험 방법론
고도화된 자율주행 도입으로 안전성과 편의성이 향상될 것으로 전망되지만 안전 평가는 여전히 해결되지 않는 과제로 남아 있다. 자율주행자동차도 기존 교통 규칙을 준수해야 하며 교통 법규 준수 여부를 자동으로 테스트 할 수 있는 방법론을 제시하고 있다.
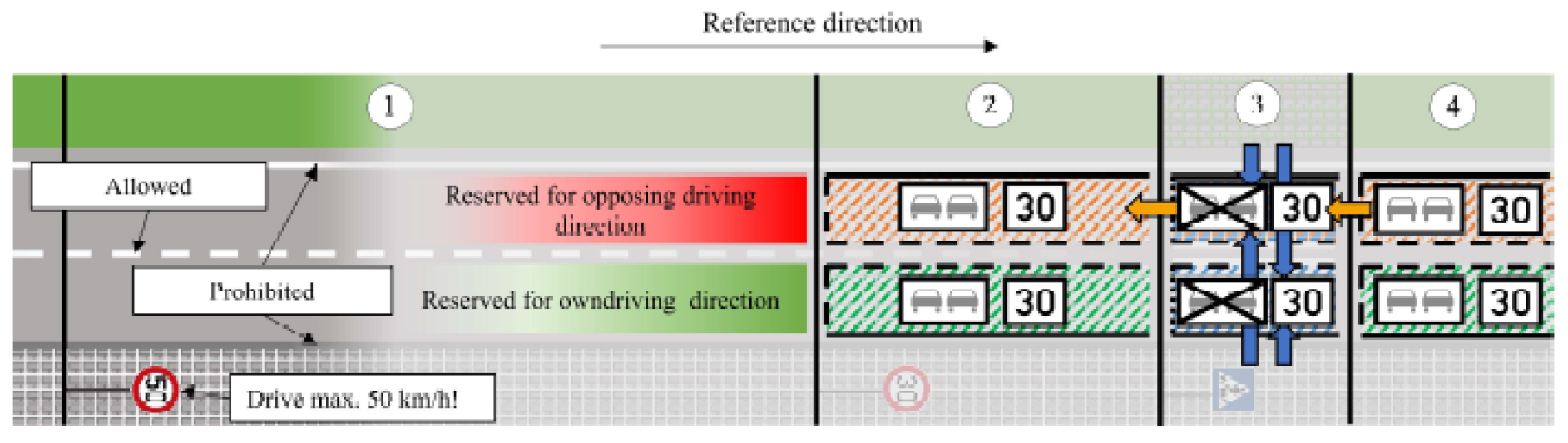
해당 학위 논문에서는 교통 법규 준수 보장하기 위한 행동 규칙 추상화 및 범용성을 다루고 있으며, 속도(A, speed limit), 경계(B, boundary), 예약(C, reservation), 추월(D, overtake) 등 4가지 행동 속성을 공식화하여 교통 환경과의 의미론적 설명이 가능하고, 이러한 행동 속성은 정밀지도(HD)에서 행동 요구사항에 대한 행동-의미론적 풍경 기술(BSSD, Behavior-Semantic Scenery Description)5)을 가능하게 하여 교통법규 준수를 자동 테스트 할 수 있으나, 속도 위반, 비신호 교차로 통행우선권, 횡단보도 정지 여부 등 부분적 교통 법규 사례 중심으로 제시되고 있어 향후 관련 연구의 확대가 필요하다고 생각된다.
Figure 3에서 보는 바와 같이 교통 법규 대부분이 4가지 행동속성으로 표현될 수 있다는 전제하에 인공지능에서 사용되는 지식 표현인 규칙, 논리식 등을 적용하여 공식화 하였고6), 이러한 공식은 자율주행 지도에 4가지 행동속성 정보가 추가된 BSSD 맵을 바탕으로 적용되어 자율주행자동차가 교통 법규를 위반할 경우 자동으로 위반 여부를 판단할 수 있다. 이는 현재 운전면허 시험인 수동채점 방식의 도로주행시험이 자동채점 방식으로 전환될 수 있는 하나의 방법론으로도 제시될 수 있다.
3) Kim et al.(2024):자율주행 운전능력 평가를 위한 시뮬레이션 기반 ODD 및 평가지표 분석
현재 자율주행 운전능력 평가에 대한 연구는 특정 조건하에서 자율주행차의 성능의 초점에 맞춰 연구가 주로 수행되고 있으며, 다양한 조건하에서 ADS의 성능을 검증하는 것은 중요하나, 인지 및 성능에 따라 혼잡교통류에 미치는 영향을 분석하여 교통류 측면의 안전성을 검증하는 것은 매우 중요하다. 이에 Kim et al.(2024)은 특정 ODD를 구현한 교통 시뮬레이션 환경에서 자율주행의 운전능력을 검증하는 방법론을 개발하고, 이를 통해 ODD별 자율주행의 운전능력을 평가하는데 적합한 평가지표를 선정하였다. 도출된 평가지표를 기반으로 ODD간 위험성을 비교하여 자율주행의 운전능력을 평가함에 있어 새로운 접근 방식을 제시하였다. 다만 연구에서 활용된 ODD는 시범운행지구라는 특수한 교통상황에서 분석된 결과이며, 실제 자율주행에 영향을 미칠 수 있는 ODD는 일부 국한되어 있는 상황으로 운전능력의 평가기준의 기초자료로 활용이 가능할 것으로 판단된다.
2. 자율주행 평가 관련 국제표준
1) ISO 34502(2022):시나리오 기반 안전 평가 프레임워크
도로 상의 기존 자동차의 기능 안전은 잘 알려진 표준 ISO 26262에 의해 포괄적으로 다루어지며, 전기/전자(Electric/Electronic) 하드웨어 구성 요소의 고장 및 결함뿐만 아니라 위험에 대한 식별 및 정량화를 위한 위험 분석 및 위험 평가 방법에 중점을 두고 있으며, 물리적 원리에 따른 중요(critical) 시나리오 구조화는 Figure 4과 같다.
그리고 자율주행 SAE Lv.2에 해당하는 첨단운전자지원시스템(ADAS, Advanced Driver Assistance System)의 등장은 자동차 산업에서 의도된 기능 안전(SOTIF, Safety Of The Intended Functionality)에 대한 보완적 측면을 볼 수 있게 하였다. 개방형 컨텍스트에서 센서 입력에 대한 이러한 시스템 의존성은 고전적인 하드웨어 오류가 없는 경우에도 다양한 위험 상황에 대한 문을 열게 되었다. SOTIF 문제는 표준 ISO/PAS(Publicly Available Spectification) 21448에서 다루어지지만 SAE Lv.2 까지만 해당된다.
기능 안전(ISO 26262 시리즈)과 SOTIF(ISO/PAS 21448)는 안전 측면에서 구별되고 필수적으로 상호 보완적이다. ISO 34502 표준은 의도된 기능에 영향을 미치는 위험 요소와 관련된 중요 시나리오를 식별하는 시나리오 기반 안전 평가 프로세스를 통합하고 이를 적용하여 자율주행에 불합리한 위험이 없는지 평가함으로써 SOTIF를 준수하고 그 내용에 특수성을 더한다(Table 1).
Table 1.
ISO standards related to autonomous driving risk-based safety assessment
| No | Standard number | Content |
| ISO 26262 (2018) | Functional safety |
Functional safety refers to the absence of unreasonable risks resulting from malfunction of electrical/electronic (E/E) systems defined as. The part 1-12 series is a risk source analysis to determine vehicle level risk sources and risk assessment, which allows assessing potential risks from system malfunction behavior and defining top-level safety objectives needed to mitigate risks. |
| ISO/PAS 21448 (2019) |
Functional safety as intended (SOTIF) |
For some E/E systems that rely on environmental sensing for awareness, potentially hazardous behavior may occur due to or within the intended function. Examples of causes of these operational hazards include the inability of a function to properly determine the situation and operate safely or lack of robustness of a function, system, or algorithm. Safety Of The Intended Functionality (SOTIF) is defined as the case where there is no unreasonable risk due to dangerous movements related to functional insufficiency. |
| ISO 34502 (2022) |
Scenario-based safety assessment framework |
Autonomous driving systems can be used in critical situations such as safety goals, identification of critical* scenarios, derivation of test scenarios based on scenario space, derivation of concrete scenarios, and testing and evaluation structuring physical critical scenarios along with a Nario-based safety assessment framework, Methodologies such as road analysis are presented, but they are applied to highways with limited access it is limited to. |
실제 교통에서 자율주행이 직면할 수 있는 안전 관련 위험 요소의 수는 일반적으로 무한한 것으로 가주된다. 이와 대조적으로 시나리오 기반 안전 평가에서 자율주행이 의존할 수 있는 물리적 원리의 수는 제한적이다. 자율주행의 동적주행작업(DDT, Dynamic Driving Task)을 인지, 판단, 제어로 세분화하여 각 하위 작업에서 하나 또는 여러 개의 특정 물리적 원리와 연관될 수 있다. 예를 들면, 인지와 관련하여 가시광선, 전파 및 레이저를 설명하는 물리적 원리에 의존하는 카메라, 레이더 및 라이다 기반 시스템에 의해 처리된다. 추가적으로 이러한 시스템에 특수 인지 센서로 간주 될 수 있는 V2X와 디지털 지도 또한 포함된다. 판단과 관련해서는 교통 참가자의 상대 운동학에 따른 경로 및 속도 계획에 의해 처리되며, 이는 운동의 원인을 참조하지 않고 점, 객체 및 객체 그룹 시스템의 운동을 설명하는 물리학의 한 분야이다. 마지막으로 제어와 관련하여 차량은 액츄에이션 명령에 의해 처리되므로 힘과 힘이 운동에 미치는 영향에 대한 연구와 관련된 물리학의 한 분야인 차량 동역학을 통해 목표 경로, 속도 및 안정성을 달성할 수 있다.
따라서 위험 요소와 그에 해당하는 중요 시나리오가 자율주행자동차의 물리적 원리에 따라 분해되고 논리적으로 구조화되면 주어진 DDT 관련 모든 합리적으로 예측 가능한 위험 원인에 대해 제공할 수 있다고 가정한다고 기술하고 있다.
3. 기존 연구문헌과의 차별성
자율주행기술의 발전으로 인해 시나리오를 기반으로 한 연구가 점진적으로 수행되고 있는 상황에서 모든 교통 법규 조항에서 요구하는 행동 요구 사항에 대한 연구가 미흡한 상황이다. 먼저 Christian et al.(2021) 중요도 분석은 국제표준 ISO 34502 에서 반영되어 물리적 요인과 더불어 자율주행자동차의 위험 요소에 대한 안전 평가에 활용되고 있으나, 교통 법규 사항에 대해서는 중요도 분석의 정보 분기에서 온톨로지(Ontology)8) 지식 베이스의 “laws” 고려 요소로만 제시되어 있어 세부적인 평가 내용으로는 다루어지지 않고 있다. 또한, Felix(2023)는 교통 법규에 대한 자율주행자동차의 준수 여부를 테스트하기 위해 기존 위험 요소 중심의 시나리오 안전평가인 ISO 34502 방법론은 시간과 비용이 많이 소요되기 때문에 다른 새로운 접근 방식이 필요하다고 기술하였다. 관련 학위 논문에서는 모든 교통 법규 조항이 4가지 행동 속성으로 표현될 수 있다는 가정 하에 교통 법규 행동 요구사항에 대한 의미론적 정량화 가능성을 보여주고 있으나, 앞에서 언급된 바와 같이 교통 법규 일부 조항에 대한 사례만을 제시하고 있어 모든 교통 법규 조항에 대해 4가지 행동 속성으로 표현할 수 있다는 의미론적 정량화에 대한 연구 확대가 필요한 실정이다. 이에 모든 교통 법규 조항에 대한 정량화를 위해 각각의 조항에서 요구하는 행동 요구 사항 파악이 필요한 실정으로 본 연구에서는 ISO 34502의 모든 물리적 위험 요인에 대한 시나리오 구조화와 같이 도로교통법을 바탕으로 모든 교통 법규에 대한 행동 요구사항을 구조화하고, 이러한 요구 사항에 대한 구조화를 위해 우리나라 도로교통법을 바탕으로 국제협약과의 비교를 통해 구조화 연구를 수행하였으며, 또한 Korea National Police Agency(2022)의 자율주행자동차 통행규칙에 대한 가이드라인 연구에 국제협약 비교를 추가하여 일부 수정을 통한 업그레이드가 가능 할 것으로 판단된다.
제협약 및 운전면허시험
1. 도로교통에 관한 국제협약
국가 간 교통 규칙의 통일성을 확립하여 국제교통의 발전과 교통안전을 제고하고자 1949년 제네바에서 도로교통에 관한 국제협약이 제정되었고 1968년 비엔나에서 개정 발전되었으며, 이러한 두 가지 협약의 효력 여부는 최근 협약을 신규 가입할 경우 그 이전의 협약은 종료되고 새로운 협약으로 대체된다.
현재 우리나라는 「1. 도로교통에 관한 국제협약(1949, 제네바)」에 가입하여 그에 따른 통행규칙, 운전면허, 자동차 등에 관한 사항을 도로교통법과 자동차관리법에서 운영 중에 있으며 외교부의 다자간 협약 효력에 대한 해석을 볼 때 국회의 비준을 받은 조약은 국내 현행법과 동일한 효력을 지니는 것으로 해석되며 이에 대한 지속적인 준수가 필요하다고 할 수 있다.9)(Ministry of Foreign Affairs, 2006) 또한 두 번째 개정판인 「19.도로교통에 관한 국제협약(1968, 비엔나)」도 전쟁 후 제정된 첫 번째 협약을 발전시킨 내용으로 우리나라 교통체계 선진화를 위해 지속적인 개선 노력이 병행되어야 할 것으로 사료된다(Table 2).
더불어, 신호기, 안전표지, 노면표시, 도로 안내표지 등을 규정하고 있는 도로 표지 및 신호에 관한 국제협약은 제네바 및 비엔나 모두 미 가입된 상태이지만 모두 도로교통 안전을 위한 중요한 시설물로써 도로교통법(Ministry of Government Legislation, 2022)과 밀접한 관계가 있기 때문에 국제 기준에 부합되는 교통안전시설의 관리도 필요한 실정이다.
Table 2.
Status of international conventions related to road traffic
| Chapter Ⅺ | B | Year | Treaties |
Member country2) |
Koera membership |
|
Transport and communications |
Road traffic |
1949 (Geneva) |
1. Convention on road traffic3) 3. Protocol on road signs and signals4) |
102 46 |
○ × |
|
1968 (Vienna) |
19. Convention on road traffic5) 20. Convention on road signs and signals6) |
84 68 |
× × |
1) UN(2023), “UN Treaty Collection”, https://treaties.un.org / 2023.04.28.
2) UNECE(2020), “UN Transport agreements / and conventions served by ECE”.
3) United Nations(1949a), Convention on Road Traffic, Geneva, 19 September 1949.
4) United Nations(1949b), Protocol on Road Signs and Signals, Geneva, 19 September 1949.
5) United Nations(1968a), Convention on Road Signs and Signals, Vienna, 8 November 1968.
6) United Nations(1968b), Convention on Road Traffic, Vienna, 8 November 1968.
자율주행이 SAE Lv. 4&5로 고도화됨에 따라 교통 법규(통행규칙) 준수에 대한 요구가 대두될 것으로 전망되는 바 도로교통에 관한 국제협약을 우선적으로 검토하였다. 주요 내용으로는 Table 3과 같이 통행규칙이 5조-34조로 대부분을 차지하고 기타 조항으로 자동차에 대한 승인 규정, 운전면허(국제면허 포함)에 대한 사항이 명시되어 있다.
Table 3.
Contents of convention on road traffic(1968, Vienna)
2. 운전면허시스템 도로주행 시험항목
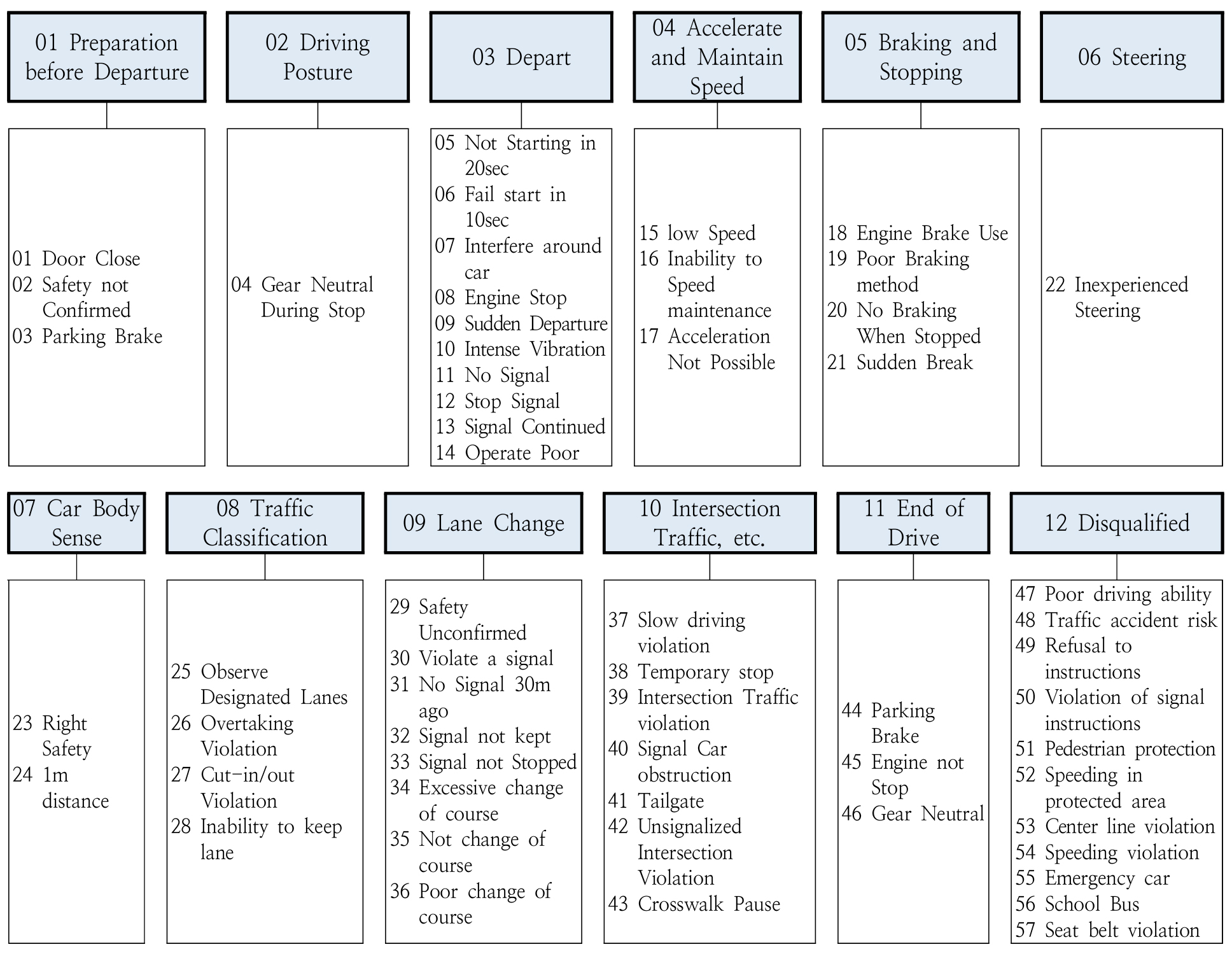
우리나라 운전면허 취득을 위한 도로주행시험은 도로교통법 시행규칙10)에 따라 2012년 도입 되어 전자채점방식을 채택하고 있으나 아직 시험 감독관에 의한 수동 채점이 대부분을 차지하고 있으며 대분류 12개, 중분류 57개 항목으로 구성되어 각 평가항목은 해당 교통 법규를 바탕으로 하고 있다(Kang et al., 2022).
현재 도로주행시험은 Figure 5와 같이 기본적으로 출발, 주행, 종료와 같이 직관적으로 이해할 수 있는 구조를 가지고 있어 이를 반영할 필요가 있으나 대분류에 있어 추가적인 기타 항목들이 너무 많아 이에 대한 조정이 필요할 것으로 사료된다. 또한 사람 운전자를 대상으로 하고 있어 주차 브레이크 미해제 같은 사람이기 때문에 실수할 수 있는 항목들을 자율주행자동차에 적용하는 것은 다소 무리가 있다고 본다.
도로교통법 구조화를 통한 평가 항목 도출
자율주행자동차의 통행규칙과 관련하여 도로교통법 조항11)에 대한 체계적 분류가 필요하여 “Korea National Police Agency(2022), 자율주행자동차 통행규칙 가이드라인 연구”에서는 ① 통행규칙, ② 고속도로 통행규칙, ③ 사고발생시 조치와 같이 대분류하여 그 각각에서 세부조항들을 명시하고 있으나, 가이드라인 성격으로 다소 직관적이지 못한 사항이 있어, 도로교통법 시행규칙 [별표26] 운전면허 도로주행시험의 시험항목 채점기준 및 합격기준에서 명시하고 있는 출발전 준비, …, 진로변경, 교차로 통행, 종료 등 실제 도로에서 차량을 주행하는 것을 가정한 분류방법을 적용하고자 한다.
도로교통법은 제1장-제5장까지는 통행 규칙과 관련된 내용이며 제6장-제14장은 운전면허, 안전교육, 운전학원, 벌칙 등에 관한 사항으로 구성되어 있다. 제6장-제14장은 통행 규칙과 직접적인 관련이 없는 조항으로 제외하였고, 제1장-제5장까지 총 67개 조항 중 용어 정의 등을 제외한 자율주행 자동차 통행 규칙과 관련된 47개 조항(Tables 4,5,6,7,8,9)을 국제협약 조항과 비교하여 구조화하였다.
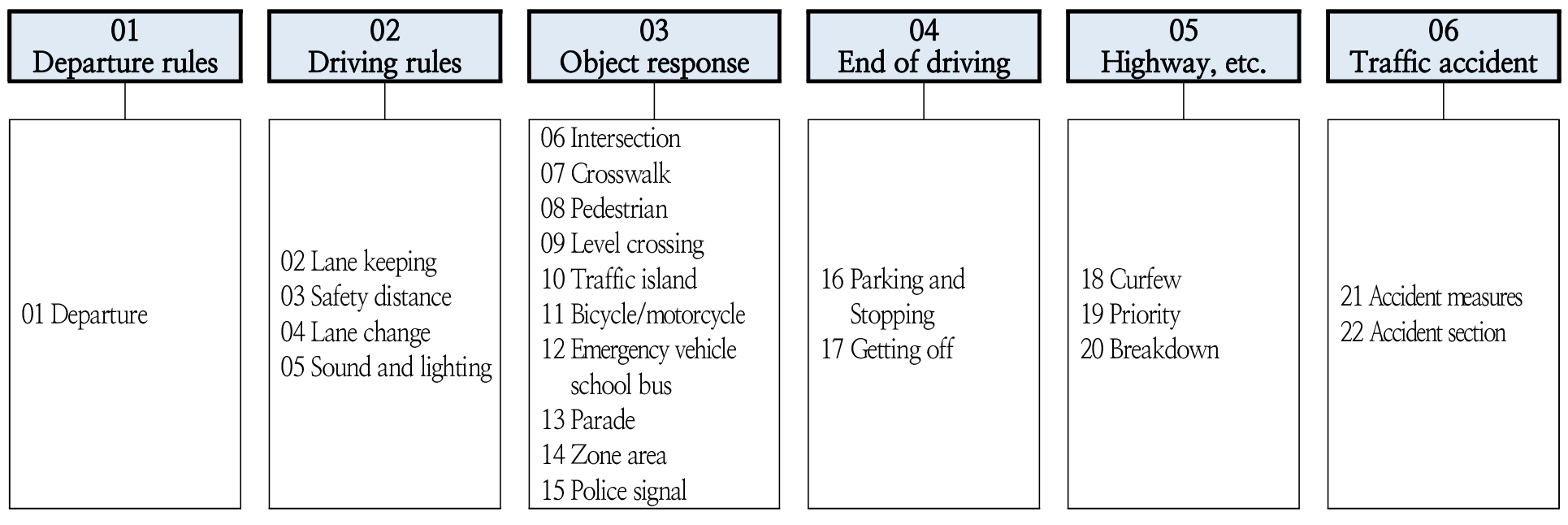
국제협약과 비교 분석한 결과 Figure 6과 같이 ① 출발, ② 주행, ③ 객체 대응, ④ 종료, ⑤ 고속도로, ⑥ 교통사고등 6개 대분류(L)와 22개의 중분류(M)로 구분하였고, 그에 따른 각각 84개의 소분류(S) 평가 항목을 도출하였으며, 도출한 항목은 아래 표와 같다.
1. 출발 규칙
본 연구를 통해 도출한 출발 규칙(L01)은 출발하기 전 모든 운전자에게 요구되는 준수사항에 대한 내용으로 출발준수(M01)을 포함하고 있다. 출발준수는 사람 운전자의 준수사항을 명시한 것으로 승차 또는 적책, 좌석안전띠, 급출발 등의 준수에 대한 조항이나, 국제협약에서는 명시되지 않은 조항이 많다(Table 4).
Table 4.
Compliance with autonomous driving traffic laws regarding departure rules
2. 주행 규칙
대분류 주행 규칙(L02)은 차로유지, 차간거리, 차로변경, 조명 및 음향 등 기본적인 주행능력에 대한 내용으로 구성된다. 중분류 차로유지(M02)은 차량의 차로를 벗어나지 않고 주행할 것을 요구하며 그 외 우측통행, 교행, 지정차로, 전용도로 통행금지 조항 등이 있다. 차간거리(M03)은 차간 안전거리 확보 여부와 제한속도 준수, 장애물에 대한 대응 등에 대한 조항이고 차로변경(M04)은 방향전환을 위한 차로변경과 추월, 국제협약에서 없는 끼어들기에 대한 조항이 포함되어 있다. 조명 및 음향(M05)은 야간, 악천후, 교행 시에 전조등에 대한 등화 의무와 경음기 사용 금지에 해당되는 조항이다(Table 5).
Table 5.
Compliance with autonomous driving traffic laws regarding driving rules
3. 객체 대응
대분류 객체대응(L03)은 주행 시 만나는 객체에 대한 인식과 대응에 대한 내용을 포함하고 있다. 중분류 교차로(M06)은 신호, 비신호, 회전교차로 통행방법에 대한 항목으로 구분될 수 있으며, 횡단보도(M07)은 보행자 보호를 위한 횡단보도 접근 서행과 일시정지에 대한 내용이다. 보행자(M08)은 무단 횡단 보행자, 보도 횡단 보행자, 좁은 도로에서의 보행자 보호에 대한 조항을 포함하고 있으며, 건널목(M09)은 철도와 교차되는 건널목의 통행 방법에 대한 조항이다. 교통섬(M10)은 교통류 흐름을 유도하는 교통섬에서 통행방법으로 우리나라에서는 없는 조항이다. 자전거 및 이륜차(M11)은 자전거 등의 지날 때 안전거리 1미터 확보에 대한 조항이고, 긴급차량 및 통학버스(M12)은 국제협약에서는 긴급차량 양보는 있으나 통학버스에 대한 조항은 없는 것이 차이점이다. 행렬(M)13)은 차로를 이용하는 행렬이 있을 경우 1미터 간격 유지 등 보행자 보호에 대한 조항에 해당한다고 할 수 있다. 보호구역(M14)은 어린이, 장애인, 노인 보호구역에 대한 내용으로 국제협약에는 장애인에 대한 조항만 있다. 경찰수신호(M15)은 경찰, 헌병, 소방공무원, 모범운전자 등의 교통정리 수신호에 대한 준수 의무 조항이다(Table 6).
Table 6.
Compliance with autonomous driving traffic laws regarding object response rules
4. 종료 규칙
대분류 종료 규칙(L04)은 주행 종료 후 주‧정차와 하차 안전에 대한 조항을 포함하고 있다. 중분류 주정차(M16)은 주정차 금지 장소, 방법, 시간 제한 및 고임목 등 미끄럼 방지 의무에 대한 준수 조항이고 하차안전(M17)은 차량을 떠날 때 준수 사항 및 문열기 하차 시 위험 야기 방지 조치 준수 조항이다(Table 7).
Table 7.
Compliance with autonomous driving traffic laws regarding driving end rules
5. 고속도로 등에서 특별 규칙
대분류 고속도로등(L05)은 보행자 통행이 금지되는 고속도로 등에서의 특별 요구사항을 포함하고 있다. 중분류 통행금지(M18)은 갓길, 버스전용차로, 다인승전용차로, 횡단, 정차 및 주차 금지에 대한 조항이고 우선순위(M19)은 고속도로 등 램프 진입 시 양보 의무에 대한 조항이며, 고장조치(M20)은 도로 가장자리 이동과, 안전삼각대, 불꽃신호에 대한 고속도로 고장조치에 대한 내용이다(Table 8).
Table 8.
Compliance with autonomous driving traffic laws regarding highway, etc. rules
6. 교통사고 조치에 대한 규칙
대분류 교통사고(L06)은 교통사고 발생 시 조치와 조치 방해 금지에 대한 내용이다. 중분류 사고조치(M21)은 교통사고 발생 시 조치와 경찰 신호 의무 준수에 대한 조항이고, 사고구간(M22)은 교통사고 구간에서의 조치 방해 금지와 차로변경 등 대응에 대한 조항을 포함하고 있다(Table 9).
Table 9.
Compliance with Autonomous Driving Traffic Laws Regarding Trffic Accident Rules
결론 및 향후 연구과제
앞에서 살펴본 자율주행 위험 기반 안전 평가와 관련된 국제표준들은 전제를 SAE Lv. 2&3 이하에서 적용하는 것을 명시하고 있으며, 최근 2022년에 제정된 ISO 34502에서도 서두 부분에서 접근이 제한된 고속도로에서 적용하는 것으로 규정하고 있다.12)
자율주행이 아직 SAE Lv. 2&3의 고속도로 기능 위주에서 Lv. 4&5의 도시 내 기능으로 전환이 요구되는 시점에서 기존의 위험 기반 안전 평가 부문에서 중요도 분석(Criticality Analysis), ISO 26262 기기(E/E) 오류, ISO/PAS 21448 SOTIF(기능 한계), ISO 34502 시나리오 기반 안전평가 프레임워크(물리적 요인) 등을 검토하였다.
본 연구에서는 자율주행의 위험 기반 안전 평가와 더불어 자율주행자동차도 교통 법규를 준수하여야 하기 때문에 법규 기반의 안전 평가 도입을 위한 기초 단계로 ISO 34502에서 제시된 물리적 요인에 따른 위험 시나리오 구조화 사례와 같은 방식으로 도로교통법을 국제협약과 비교하여 직관적 이해를 위해 ① 출발 규칙, ② 주행 규칙, ③ 객체 대응 규칙, ④ 종료 규칙 등 4가지 대분류와 기타 ⑤ 고속도로 등, ⑥ 교통사고 처리 등 2가지 대분류로 구조화하여 각각의 하위 항목으로 중분류 총 22개, 소분류 총 84개의 통행 규칙에 대한 평가 항목으로 구성하였다. 또한 도로교통에 관한 국제협약(1968, 비엔나)과 비교하여 해당 있음(◯), 일부 해당(△), 해당 없음(×)으로 구분하여 제시하였다.
본 연구 결과는 자율주행 개발 시 고려되어야 할 모든 교통 법규 조항에 대한 시나리오 구조화에 대한 연구로 ISO 34502 물리적 위험 요인에 대한 구조화를 제시한 것처럼 우리나라 도로교통법을 분해하고 논리적으로 구조화하여 자율주행자동차가 준수하여야 교통 법규에 대한 전체 커버리지를 제공할 수 있을 것으로 기대한다. 또한 이러한 구조화가 교통 법규에 대한 컴퓨터 인공지능을 위한 학습, 추론, 인지 등의 온톨로지 방식 등의 지식 표현으로 역할하기 위한 기초 연구로도 활용될 수 있을 것으로 볼 수 있다.
향후 자율주행의 법규 기반 안전 평가를 위해서 보완되어야 할 추가적으로 필요한 연구 2가지를 제시하고자 한다. 첫 번째는 우리나라 도로교통법을 국제협약과 비교하여 세부 평가 항목을 제시하였지만 이러한 세부 평가 항목들에 대한 세부 평가 내용과 정량화에 대한 추가적인 연구가 필요하다. 교통 법규에 대한 세부 평가 내용과 정량화에 대한 연구는 아직 초기 단계이지만 앞에서 살펴본 ISO 34502 물리적 위험 요인과 Felix(2023) 교통법규 준수에 대한 시험방법론은 좋은 예 가 될 수 있으리라고 본다.
추가적으로, 도로교통법상 통행규칙이 모호한 부분과13) 자율주행 평가에 적합한지 여부는 Felix(2023)은 연구범위에서 제외하고 있어 세부 평가내용에 대한 추가적인 연구가 진행되어야 할 것으로 사료되며, 구체적인 평가기준에 대해서는 해당 논문에서 제시된 4가지 행동 속성 위반 관련 정량화(공식화)에 모든 교통 법규 적용이 가능한지에 대한 연구가 필요하다. 또한 사람 운전자 중심의 도로교통법에 근거한 평가방법을 자율주행 AI평가에 적용하는데 있어서는 몇 가지 문제점이 있다고 보는데, 이는 미국 도로교통안전국(NHTSA, National Highway Traffic Safety Adminstration)의 자율주행에 대한 가이드라인 중 하나인 HMI(Human Machine Interface)와도 관련이 있다. 본 연구의 평가 항목으로 제시된 S09 승객 소란행위 방지, S73 미끄럼 방지(고임목 및 조향 조치), S81 고속도로 고장 등의 조치(삼각대 및 불꽃신호), S82 교통사고 발생 시 조치(사상자 구호) 등은 사람 운전자 중심의 조항으로 AI 평가에서는 다른 방식으로 고려되어야 할 것으로 사료된다.
두 번째는 우리나라와 국제협약과의 교통 법규 차이점에 대한 연구가 필요하다. 글로벌 자동차 시장이 전 세계를 대상으로 하고 있어 우리나라에서 만들어진 자율주행자동차가 국제적으로 통일된 교통 법규와 다른 사항이 적용되었을 때 다른 국가에서는 사고 위험 요인으로 작용할 수 있다. 예를 들면 우리나라의 적색신호 시 우회전, 비보호 좌회전, 비신호 교차로에서의 통행 우선권 등은 국제협약에서 규정하고 있는 교통 법규와 다르기 때문에 다른 국가에서 사고를 유발할 수 있어 사전에 운전면허시험과 같이 이를 확인하는 과정이 필요하고, 이와 같은 이유로 국제협약을 바탕으로 교통 법규 차이점에 대한 연구가 수행될 필요가 있다고 사료된다.
