

서론
선행연구
1. 주차로봇 경로생성 알고리즘 산정에 관한 연구
2. 격자 단위 설정 및 경로 생성 시간 단축 방법
3. 모델 검증 시나리오
연구방법론 및 분석모형 설정
1. 연구 방법론
2. Hybrid A-star과 RRT 알고리즘의 혼합 모델 구조
Step 1: RRT 알고리즘을 사용하여 초기경로 생성
Step 2: 초기 경로 주변 복도 생성
Step 3: 복도기반 Hybrid A-star 알고리즘 경로 생성
모형 적용 및 분석 결과
1. 실험 및 모델 검증을 위한 시나리오 구성
2. 모델 검증 결과
결론
서론
현대 도시에서 수요·공급의 불균형에 따른 주차 공간의 부족과 비효율적인 주차 문제는 교통 혼잡을 가중시키는 중요한 요인으로 작용하고 있다(Sin et al., 2020). 또한, 주차 공간 부족에 따른 불법주차는 보행권 침해하고 교통사고를 유발한다(Lee et al., 2014). 이러한 문제를 해결하기 위한 혁신적인 기술로 주차로봇이 주목받고 있으며, 이를 구현하기 위해서는 효율적인 주차 경로 계획이 필수적이다. 현재 주차로봇의 경로 생성에는 A-star 알고리즘이 가장 많이 사용되는데, 이는 단순성과 효율성, 빠른 경로 탐색 능력으로 실시간 응용에 적합하기 때문이다(Cui et al., 2019). 그러나 A-star는 차량의 조향각 및 회전반경 같은 동적 특성을 충분히 반영하지 못해, 실제 주차 상황에서 경로 계획의 현실성과 효율성에 한계가 있다.
이러한 한계를 보완하기 위해, A-star 알고리즘의 강화 버전인 Hybrid A-star 알고리즘을 사용한다. Hybrid A-star 알고리즘은 차량의 회전 반경, 속도, 가속도 등 동역학적 제약을 고려할 수 있다는 장점이 있으며, 차량의 동적 특성을 휴리스틱 계산에 반영하여 현실적이고 실행 가능한 경로를 생성할 수 있다. 이러한 특성 덕분에, Hybrid A-star 알고리즘은 자율주행 차량 및 로봇의 경로 계획에 적합한 선택이다(Tiangen et al., 2024).
그러나, Hybrid A-star 알고리즘은 각 노드의 비용 함수에 차량의 회전반경 및 조향각을 반영하므로 계산이 복잡하고, 경로 생성 시간이 길어진다는 단점이 있다. 계산에 사용되는 기본단위인 격자(grid) 크기의 선택은 주차환경의 복잡성, 차량의 크기, 정확도 그리고 계산 시간을 고려하여 결정되는데, 격자의 크기가 작을수록 차량의 크기와 정확도가 올라가지만 계산의 복잡성과 경로 생성 시간이 증가한다.
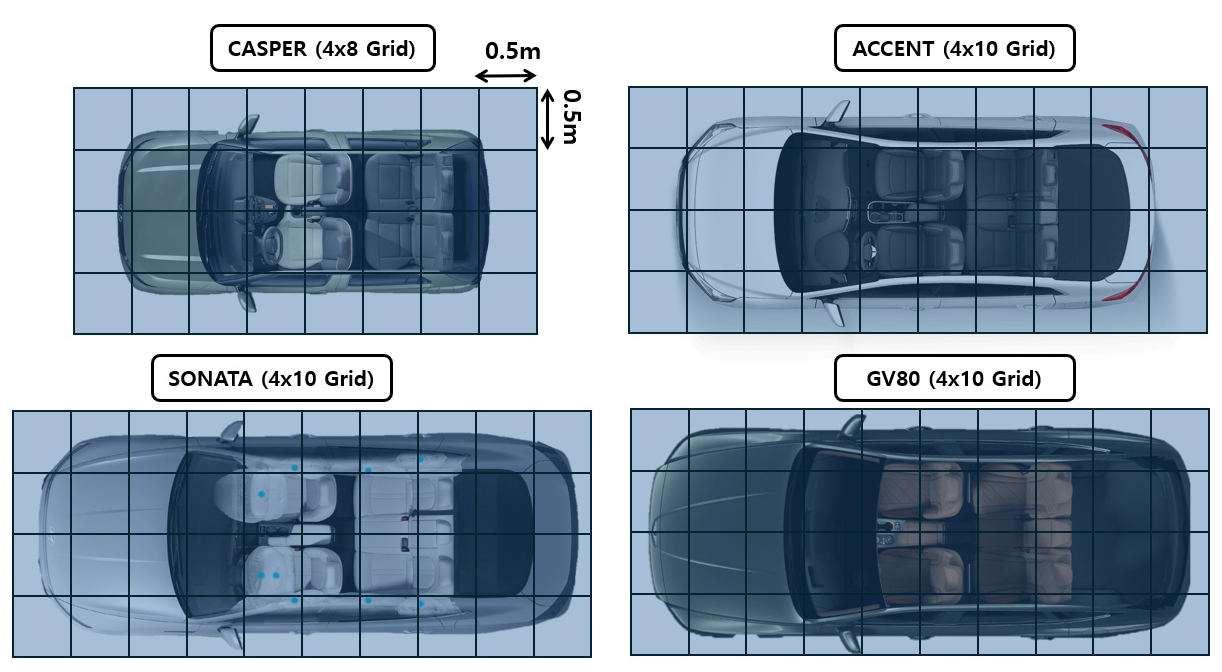
일반적으로 Hybrid A-star 알고리즘을 사용하여 주차로봇 주차경로 탐색 시 사용되는 격자의 크기는 경로 생성 시간을 고려하여 0.5m-1.0m로 설정하는데, 이는 주차 경로 계획에서 차량 및 장애물의 크기를 정확하게 반영하기에는 부족하다(Nguyen et al., 2023). 예를 들어, Table 1에서 0.5m 격자를 기준으로 전장 3,595mm, 전폭 1,595mm의 크기인 현대의 캐스퍼 차량은 8grid×4grid(4,000mm×2,000m)로 표현되는데, 이 경우 경로 생성 시 차량의 크기가 Figure 1처럼 과도하게 반영된다. 또한 0.5m 격자를 기준으로 하였을 때 소형 차량인 엑센트와 준대형 차량인 GV80이 동일한 크기로 반영된다. 또한, 주차장 내 장애물 역시 최소 0.5m 단위로 표현되어 장애물 회피에 있어도 정확도가 저하된다.
Table 1.
Actual VS refected with a grid setting of 0.5m
따라서 차량의 크기를 정확히 반영하기 위해서는 격자의 크기를 최소한 0.1m 단위로 해야 구분 가능하다. 이는 차량의 크기 차이를 구분할 수 있는 최소 단위이기 때문이다. 그러나 0.1m 단위로 격자를 세분화할 경우, 계산량이 크게 증가하게 되며, 이로 인해 경로 생성 시간이 지나치게 길어지는 한계가 존재한다. 이러한 문제를 해결하기 위해, 본 연구는 격자의 크기를 줄이면서도 경로 생성 시간을 단축할 수 있는 기존 Hybrid A-star에 RRT 알고리즘을 혼합한 새로운 경로 탐색 방법론을 제시하고 라이다(LiDAR) 센서를 이용하여 실시간으로 차량의 크기를 인식하여 이에 적용한 결과를 제시한다. 이를 통해 실시간으로 입차 하는 차량 크기와 주차장 내 장애물의 크기를 더욱 정확히 반영하고, 경로의 정확도를 향상시키는 동시에 경로 생성 시간을 최소화하여 실시간 경로 계획에 적합한 효율적인 모델을 구축하는 것을 목표로 한다.
선행연구
1. 주차로봇 경로생성 알고리즘 산정에 관한 연구
자동 주차에 사용되는 주차로봇 경로 생성 알고리즘에 대한 연구와 다양한 알고리즘을 비교하여 주차 경로의 효율성을 높이기 위한 연구는 여러 시도가 있었다. A-star, RRT, KPP와 같은 대표적인 경로 생성 알고리즘은 각기 다른 장단점을 가지고 있어, 차량형 자율주행 로봇의 자동 주차 시스템에 적합한 경로 계획법을 선택하는 데 중요한 기준이 된다. 특히, A-star 알고리즘은 범용성과 효율성 측면에서 널리 사용되지만, 차량의 동역학적 특성을 반영하지 못해 실제 주차 상황에서 한계를 드러낸다. RRT 알고리즘은 빠른 계산 속도로 복잡한 환경에 적합하지만, 랜덤 샘플링에 의존하여 좁은 공간에서의 경로 탐색에 한계가 있다. 따라서, 다양한 연구들이 이러한 알고리즘의 장단점을 비교 분석하여 주차로봇의 경로 계획 성능을 향상시키기 위한 개선 방안을 제안한다.
Kwon et al.(2012)은 자동 주차를 위한 차량형 자율주행 로봇에 적합한 경로 계획법으로 A-star, RRT, KPP 알고리즘을 비교하였으며, A-star 알고리즘이 범용성, 제어 용이성, 최적화의 측면에서 높은 평가를 받았으나, 차량의 실제 움직임을 적절히 반영하지 못한다는 한계를 지적하였다. RRT 알고리즘은 계산 속도가 빠르고 복잡한 환경에 적합하지만, 랜덤 샘플링 방식으로 인해 좁은 공간에서 경로를 생성하는 데 어려움이 있었다. KPP 알고리즘은 좁은 주차 공간에서 경로 탐색이 용이하지만, 계산량이 많아질수록 처리 시간이 증가하는 문제가 있었고 지적했다.
Paden et al.(2016)은 자율주행차의 다양한 경로 계획 알고리즘들을 검토하였다. A 알고리즘이 최적 경로를 찾는 데 매우 효율적이고, 실시간 응용에 적합한 반면, 비홀로노믹(nonholonomic) 제약 조건을 고려하지 않아 차량의 조향 각도나 동적 특성을 반영하지 못하는 문제가 발생할 수 있음을 지적하였다. 이로 인해 실제 차량이 경로를 따라갈 수 없는 경우가 생길 수 있음을 강조하였다.
Guruji et al.(2016)는 연구에서 A-star 알고리즘을 개선하여 로봇의 경로 계획 성능을 높이는 모델을 제안하였다. 특히, 알고리즘의 과정을 일부 병렬 처리하여 계산 속도를 증가시키고 시간 효율성을 높였으나, 이 연구 역시 차량의 동역학적 특성을 반영하지 못했다는 한계가 있었다.
본 연구는 이러한 기존 알고리즘의 한계를 극복하고자 A-star 알고리즘의 강화 버전인 Hybrid A-star 알고리즘과 RRT 알고리즘을 혼합한 모델을 제안한다. Hybrid A-star 알고리즘은 차량의 동역학적 특성을 반영할 수 있어 현실적이고 실행 가능한 경로를 생성할 수 있으며, RRT 알고리즘은 계산 속도가 빠르고 복잡한 환경에서 경로 탐색이 유리하다. 두 알고리즘을 결합하여 차량 크기와 동적 특성을 고려한 유연하고 효율적인 경로 생성 모델을 구축하고자 한다.
2. 격자 단위 설정 및 경로 생성 시간 단축 방법
기존 경로 생성 시간을 단축하는 방법에 대한 연구에서는 계산량을 줄이기 위한 다양한 접근법이 제시되었다. 대표적인 방법으로는 격자의 크기를 늘리거나 시나리오의 크기를 줄이는 방식이 있다. 격자의 크기를 늘리면 경로 탐색 시 계산해야 하는 셀의 수가 줄어들어 경로 생성 속도가 빨라지는 반면, 경로의 정밀도가 낮아지는 문제가 발생할 수 있다. 반대로 시나리오의 크기를 줄이는 것은 탐색해야 할 전체 공간의 범위를 줄이는 방법으로 탐색 공간이 작아져 계산량이 감소하지만, 실제 상황을 반영하기에는 어려움이 있다. 이 외에도 경로 탐색에 필요한 휴리스틱 계산을 최적화하거나, 알고리즘의 일부를 병렬 처리하여 성능을 높이는 방법, 더 효율적인 데이터 구조를 사용하는 방법 등이 사용되고 있다. 이러한 방법들은 계산량을 줄이면서도 경로 생성의 정확성을 유지하는 데 중점을 두고 있다.
Park et al.(2014)은 주차공간에서의 자동 주차 경로계획 알고리즘에 대하여 연구하였으며, 해당 연구는 격자 크기를 0.2m로 설정함으로써 차량의 이동 경로를 보다 세밀하게 계획하였다. 0.2m 격자 크기를 사용함으로써 알고리즘은 더 많은 경로 선택지를 고려할 수 있으며, 이는 최적의 주차 경로를 찾는데 유리하여 기존의 방법들에 비해 주차 성공률이 높은 결과를 보였지만 해당 연구는 경로 생성 시간을 고려하지 않았다.
Sheng et al.(2021)은 자율 주행 차량이 좁은 공간에서 주차할 수 있도록 경로를 계획하는 방법을 제안하였고, 이 연구는 Hybrid A-star 알고리즘과 수치 최적 제어 기업을 결합하여 복잡한 환경에서도 효율적이고 안전한 주차 경로를 생성하는 방안을 제시하였다. 해당 연구에선 효율적인 경로 생성 시간을 고려하여 시나리오 맵의 크기를 50m×50m로 제한하여 시간을 단축하였다.
Kim et al.(2022)은 자율주차을 위한 제약적인 주차 공간에서의 경로 계획 문제를 해결하고자 Reeds-Shepp Curve 과 Hybrid A-star 알고리즘을 사용하여 기존 알고리즘보다 효율적으로 경로를 생성할 수 있는 방법을 제시하였고 딥러닝 기술을 사용을 더하여 모델의 정확도를 향상시켰다. 해당 연구에서 Grid의 크기를 2m와 0.5m로 설정하여 분석하였는데, 2m 대비 0.5m로 설정하였을 때 경로 생성 시간이 4배가 증가하였지만 이동거리가 약 12.3% 감소하는 것으로 분석되었고 2m로 설정 시 경로 생성이 되지 않는 문제도 발생하였다.
Dang et al.(2022)은 비홀로노믹 로봇의 경로 계획에서 경로 생성 시 Reeds-Shepp 곡선을 사용하여 로봇의 이동 가능성을 고려하였고 Hybrid A-star 알고리즘을 사용하여 경로의 정확성과 효율성을 높였다. 로봇이 이동할 수 있는 공간을 세분화하여 경로계획의 정확성을 높이기 위해 격자의 크기를 1.0m로 구성하였고 시나리오 맵의 크기도 50m×30m으로 제한하여 분석하였다.
이에 본 연구는 Hybrid A-star 알고리즘을 기반으로 RRT 알고리즘을 결합하여, 기존의 경로 생성 알고리즘들이 가지고 있는 계산량 증가 문제를 해결하고자 한다. 이를 통해 격자의 크기를 줄이면서도 경로 생성 시간을 최소화하는 모델을 제시하고, 차량의 크기와 장애물을 보다 정밀하게 반영하여 주차 경로의 정확성과 효율성을 동시에 향상시키는 방법을 제안한다.
3. 모델 검증 시나리오
기존 연구들은 모델 검증 시, 계산량 증대 및 경로 생성 시간 증가 문제를 해결하기 위해 시나리오 크기를 제한하거나 축소하여 분석을 진행하였다. 이러한 제한된 시나리오 환경은 알고리즘의 성능을 평가하는데 효율적이지만, 실제 상황을 충분히 반영하지 못할 수 있다.
Kim et al.(2022)은 Hybrid A-star 알고리즘과 Reeds-Shepp Curve를 혼합한 모델을 제안하였고, 모델 검증 시 계산량과 데이터 처리 용량을 고려하여 시나리오를 구성하였다. 그는 주차 구획 수를 8개로 제한하고 시나리오 맵의 크기를 18m × 27m로 설정하였고 차량은 현대의 그랜저HG 차량을 대상으로 하여 모델의 성능을 검증하였다. 이를 통해 제한된 상황에서 경로 생성 속도와 주차 성공률 간의 상관관계를 확인할 수 있었다.
Kim et al.(2024)은 딥러닝을 활용한 주차 경로 생성 모델을 연구하면서, 이진 맵을 사용한 시나리오 환경을 구축하였다. 이때 지나치게 큰 맵은 메모리 요구량을 증가시키고 가시성을 떨어뜨릴 수 있어, 시나리오 맵 크기를 50m x 50m로 통일하였으며, 차량의 크기는 길이 4.8m, 너비 1.8m로 고정하여 검증을 진행하였다. 이는 주차 환경에서의 경로 생성 성능을 평가하기 위해 시나리오 맵의 크기 제한하였다.
그러나, 기존 연구들은 실험 시 차량의 크기를 고정된 값으로 설정하여 경로 생성 모델을 검증하였다. 차량 크기에 따라 경로가 달라질 수 있음에도 불구하고, 고정된 차량 크기는 다양한 차량 모델에 대한 유연성을 검토하기엔 한계가 있다. 본 연구는 이러한 한계를 보완하고자 실시간으로 차량의 크기를 측정한 후, 해당 차량 크기에 맞춘 맞춤형 경로를 생성하는 방식을 도입하였다. 이 방식은 차량의 크기와 주차장의 제약 조건을 더욱 정확하게 반영하여, 다양한 크기의 차량이 효율적으로 경로를 탐색할 수 있도록 한다. 라이다(LiDAR) 센서를 이용하여 실시간으로 차량 크기를 측정함으로써, 기존 연구들의 고정된 차량 크기를 기반으로 한 경로 생성의 한계를 극복하고자 한다.
본 연구에서는 기존 연구들의 한계를 보완하기 위해 시나리오 크기를 제한하거나 축소하지 않고, 실제 운영 중인 공영주차장의 크기를 기반으로 주차장의 크기와 통로 폭은 『주차장법 시행규칙』에 따라 각각 2.6m × 5.2m와 5.5m로 설정하여 검증을 진행하였다. 특히, 차량이나 보행자 등 장애물이 존재하는 제한된 시나리오도 구축하여, 경로 생성 모델의 유연성과 장애물 회피 성능을 평가할 예정이다. 이를 통해 더 현실적인 주차 환경에서 모델의 실효성을 검토하고, 다양한 주차 상황에 대응할 수 있는 경로 생성 방법론을 제시하고자 한다.
연구방법론 및 분석모형 설정
1. 연구 방법론
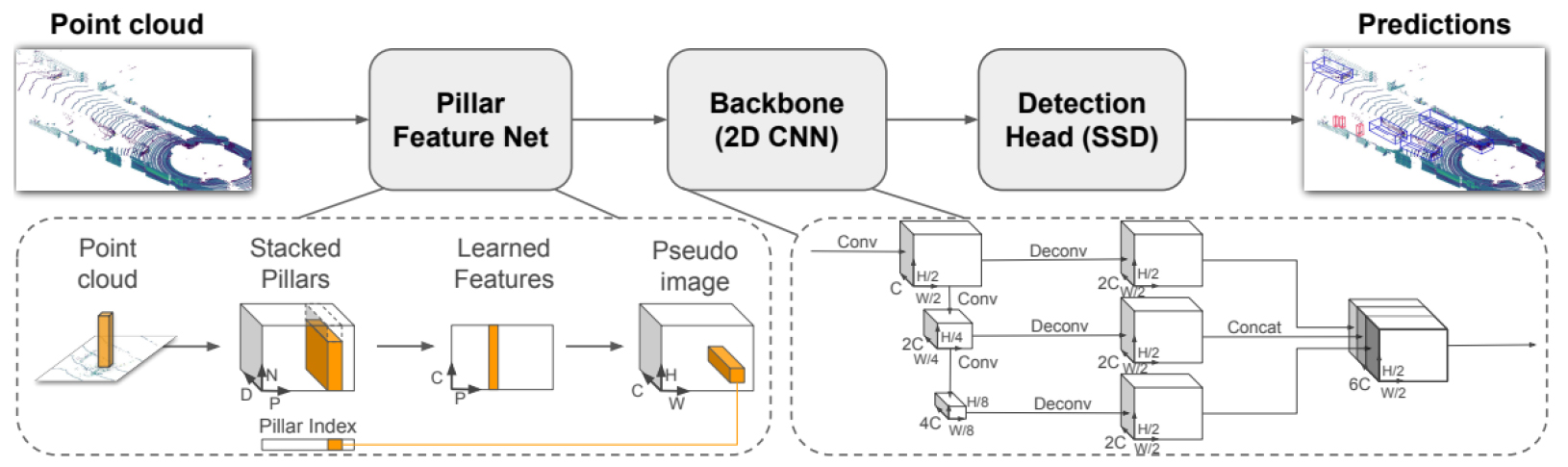
본 연구에서는 라이다(LiDAR) 센서를 사용하여 차량의 크기를 검출하기 위해 Lang et al.(2019)가 제시한 딥러닝을 이용하여 PointPillars 방식을 통해 효율적으로 물체 크기 측정한다. PointPillars 방식은 3D 점 구름 데이터를 처리하기 위해 "Pillars" 개념을 도입하여 각 크기를 격자로 나누어 점들을 집합한다. 각 Pillars에 포함된 점들은 위치와 반사 강도와 같은 특징을 기반으로 벡터 형태로 변환되며, 이러한 특징 벡터는 딥러닝 모델에서 활용되며 해당 과정은 Figure 2에 절차와 같다.
이후, 점 구름 데이터로부터 생성된 2D 텐서를 딥러닝 모델인 2D 컨볼루션 신경망(CNN)에 입력하여 물체를 감지한다. 이 과정에서 생성된 2D 특징 맵은 빠르고 정확하게 물체를 인식하는 데 기여하며, 감지된 차량에 대한 바운딩 박스를 생성한다. 바운딩 박스는 차량의 중심 위치, 크기, 방향을 포함하여 3D 공간에서 물체를 정의한다.
PointPillars는 기존의 3D 물체 감지 방법보다 뛰어난 속도와 효율성을 제공하며, 이러한 방법을 활용하여 본 연구에서는 차량의 크기를 검출하고, 해당 크기를 고려하여 Hybrid A-star와 RRT 알고리즘을 혼합한 모델을 통해 최종 경로를 생성한다.
2. Hybrid A-star과 RRT 알고리즘의 혼합 모델 구조
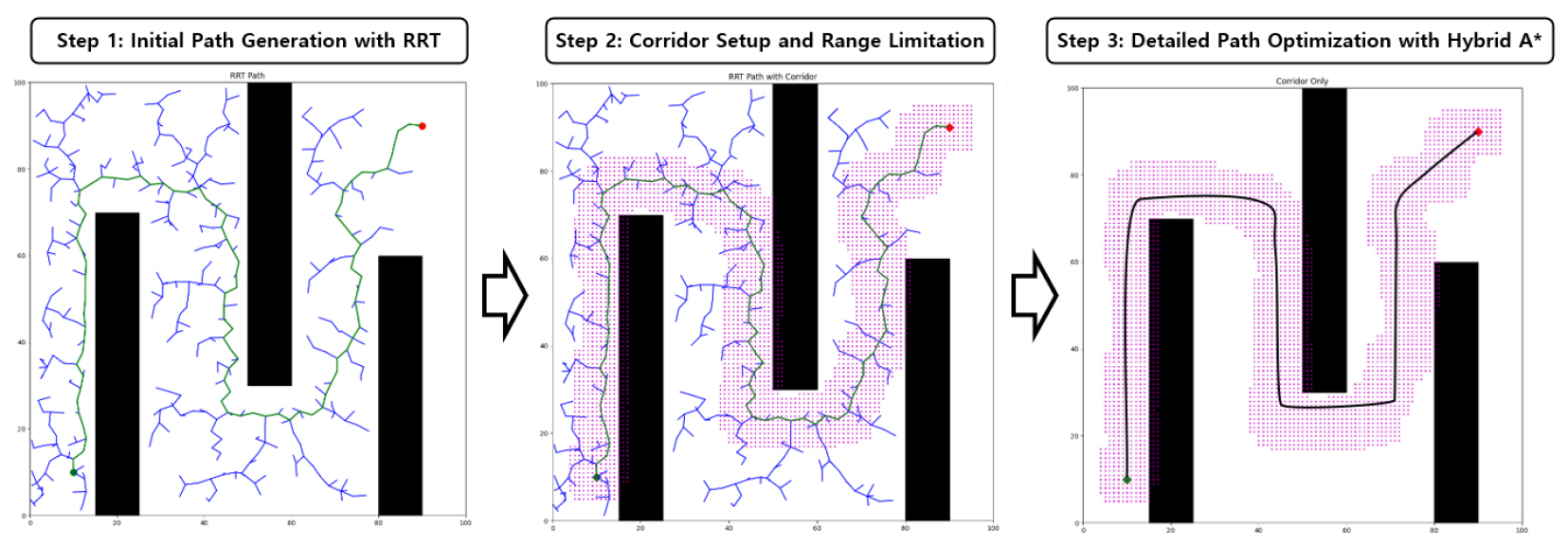
본 연구에서 제안하는 주차 경로 생성 모델은 경로 탐색의 효율성 및 정확성을 고려하여 3단계로 구성한다.
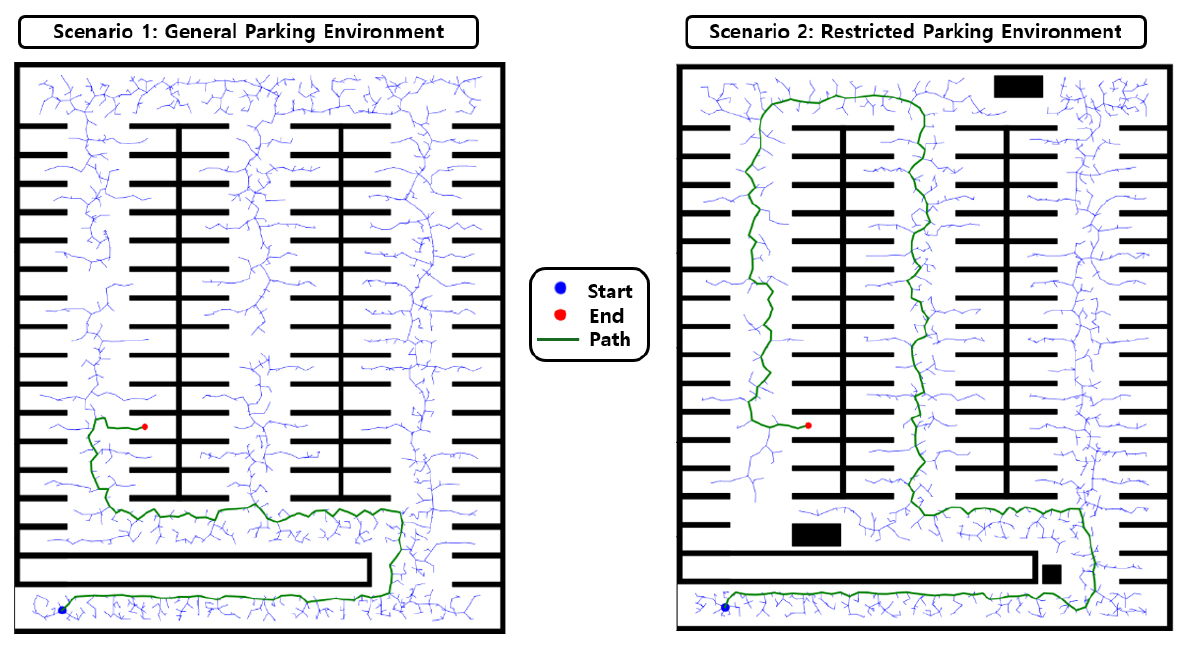
첫 번째 단계에서는 RRT(Rapidly-exploring Random Tree) 알고리즘을 사용하여 초기 경로를 빠르게 생성한다. 이 알고리즘은 무작위 샘플링을 통해 빠르게 유효한 경로를 도출하며, 주차 공간 내에서 장애물 회피 경로를 신속하게 찾는다.
두 번째 단계에서는 RRT 알고리즘을 통해 생성된 초기 경로 주변에 복도(Corridor)를 설정하고, 경로 탐색 범위를 이 복도로 제한한다. 전체 공간에서 경로를 탐색하는 대신, 복도 내에서만 경로 최적화를 진행함으로써 경로 생성 시간을 크게 단축할 수 있다. 절약된 계산 시간을 바탕으로 격자의 크기를 세분화할 수 있으며, 이로 인해 차량의 크기, 회전 반경, 장애물과의 안전거리를 보다 정확하게 반영하게 된다. 그 결과, 더 정밀한 경로 생성이 가능해진다.
마지막 단계에서는 복도 내에서 Hybrid A-star 알고리즘을 적용하여, 차량의 동적 특성을 반영한 세밀한 경로를 생성한다. Hybrid A-star 알고리즘은 차량의 연속적인 움직임과 물리적 제약을 고려하며, 복도 내에서만 경로 탐색을 수행하기 때문에 불필요한 노드 계산을 줄일 수 있다. 이렇게 하여 복잡한 환경에서도 정확하고 효율적인 경로를 도출할 수 있으며, 경로 탐색 시간을 절약함으로써 차량 및 장애물 크기를 더욱 세밀하게 반영한 경로가 생성된다.
Figure 3에 제시된 이 3단계 구조는 계산량을 줄이면서도, 세분화된 격자를 통해 경로 탐색의 정확성을 극대화하는 데 중점을 둔다.
Step 1: RRT 알고리즘을 사용하여 초기경로 생성
첫 번째 단계로, 본 연구에서는 RRT 알고리즘을 사용하여 차량의 크기와 동역학적 제약을 고려하여 장애물을 회피한 목적 지점까지의 초기 경로를 생성한다. RRT 알고리즘은 시스템의 상태 공간 내에서 주어진 제한 요소를 고려하여 타겟 노드로의 경로를 찾는 샘플링 기반 탐색 방법이다. 본 연구에서 첫 번째 단계로 RRT 알고리즘을 사용하여 목적지까지의 초기 경로를 생성하는 과정을 다음과 같이 상세하게 설명할 수 있다.
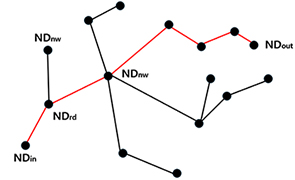
RRT 알고리즘은 변수 V = {v1, v2, …, vm}으로 표현되는 시스템에서, 모델의 한 상태를 나타내는 노드(NDx)에서 타겟 노드(NDy)로 이동하는 경로를 탐색하는 구조를 갖는다. 이때, 시스템의 상태는 다양한 변수 값의 집합으로 정의되며, RRT 알고리즘의 노드들은 "RRT 노드"로 불린다. RRT 알고리즘은 상태 공간의 가능한 모든 노드 사이에서 경로를 탐색하며, 주어진 제한 사항에 맞는 변수 시퀀스를 계산한다(Park et al., 2016)
RRT 알고리즘의 일반적인 구조는 Table 2와 같다. 알고리즘은 시스템의 시작 노드(NDin)에서 시작하여, 트리를 점차적으로 확장해 나간다. 이 트리의 첫 번째 노드는 시작 노드(NDin)이며, 이후 확장 과정에서 무작위로 선택된 노드(NDrd)와 가장 가까운 노드(NDnr)를 선택하여 트리를 확장한다. 이 과정에서 시스템의 상태를 NDnr에서 NDrd로 이동시키기 위한 입력 값(Inr)을 계산하며, 내부 변숫값은 미리 정해진 시뮬레이션 시간 ΔT 동안 시뮬레이션을 통해 얻는다. RRT 알고리즘의 탐색 과정에서 중요한 부분으로, 무작위로 선택된 NDrd와 가장 가까운 노드(NDnr) 사이의 거리를 줄이기 위한 입력 값(Inr)을 구하는 과정을 강조하고 있다. 이러한 입력 값은 시스템이 주어진 시간 동안 목표 위치로 이동할 수 있도록 도와주며, 이를 통해 새로운 노드(NDnw)가 생성된다. 만약 정확한 Inr 값을 구하지 못하는 경우, 트리에 존재하는 노드들로부터 가장 가까운 노드를 찾아 해당 변숫값을 사용하여 경로를 확장한다. 알고리즘의 반복 과정에서 RRT는 NDrd를 무작위로 선택하기 때문에 최적의 경로 탐색은 어렵고, 경로가 비효율적이거나 충돌이 발생할 수 있다. 하지만 RRT 알고리즘의 장점은 빠르게 초기 경로를 생성할 수 있다는 점으로, 복잡한 환경에서 유용하게 사용될 수 있다. RRT 알고리즘은 특정 확장 횟수(K)를 초과하거나, 타겟 노드에 도달했을 때 Figure 4와 같이 경로를 확정하고 알고리즘을 종료된다(Park et al., 2016).
Table 2.
RRT algorithm flow
본 연구에서 RRT 알고리즘을 초기 경로 생성에 사용하는 이유는 차량의 크기와 다양한 제약 조건을 반영하면서도 빠르게 경로를 탐색할 수 있기 때문이다. 또한, 이러한 RRT 알고리즘의 구조적 특성은 복잡한 환경에서도 초기 경로 탐색을 신속하게 수행할 수 있는 장점을 제공하지만, 비효율적인 경로 생성의 한계를 보완하기 위해 후속 단계에서 Hybrid A-star 알고리즘을 결합하여 경로 최적화를 수행할 계획이다.
Step 2: 초기 경로 주변 복도 생성
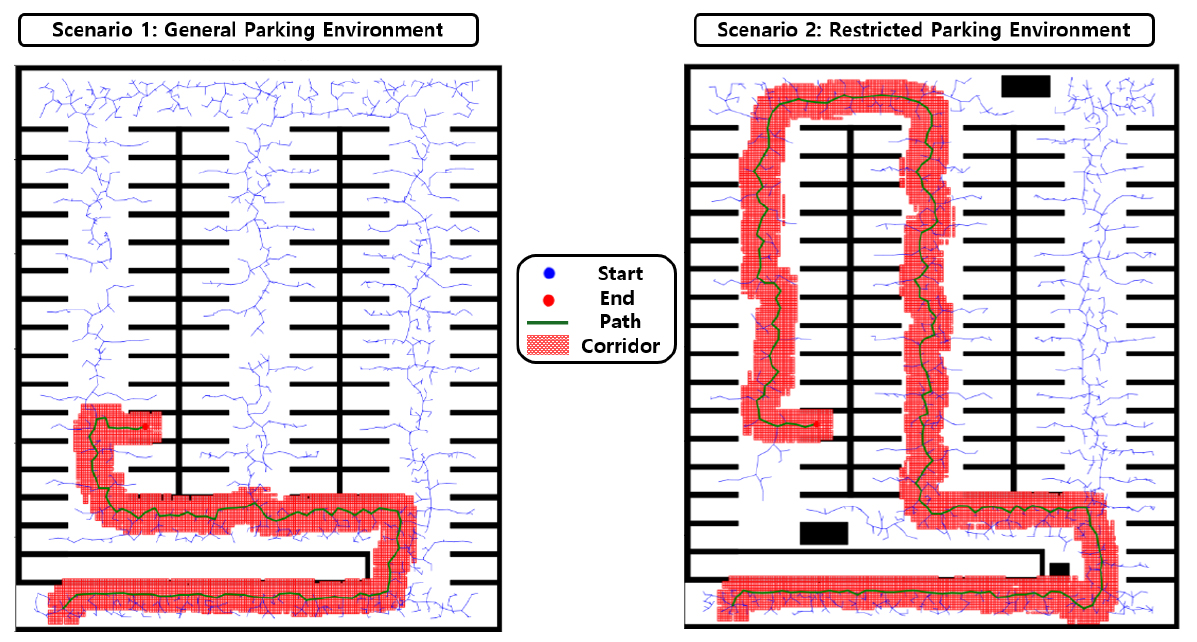
본 연구의 두 번째 단계에서는 RRT 알고리즘을 통해 생성된 초기 경로를 기반으로 해당 경로를 중심으로 일정 크기의 grid를 복도로 지정하여 경로 최적화를 진행한다. 이 과정은 전체 공간에서 경로를 탐색하는 대신, 복도로 설정된 제한된 구역 내에서만 경로를 세밀하게 최적화하는 방법으로, 경로 탐색의 효율성을 높이는 것을 목표로 한다.
RRT 알고리즘은 무작위 샘플링을 통해 빠르게 경로를 생성할 수 있는 장점이 있으나, 생성된 경로가 비효율적일 가능성이 있으며, 실제 차량의 운행을 충분히 반영하지 못할 수 있다. 따라서 이러한 초기 경로를 개선하고 차량이 실제로 주행 가능한 최적의 경로를 찾기 위해 특정 구간을 복도로 설정하여 경로 탐색을 제한하고 탐색 범위를 줄이는 것이 필요하다. 복도 설정을 통해 경로 탐색 범위를 제한함으로써 계산량을 줄이고, 경로 최적화의 정확성을 높일 수 있다.
복도의 크기는 차량의 크기, 회전 반경, 주차장 내 장애물과의 안전거리를 고려하여 설정된다. 복도의 폭이 너무 좁으면 차량이 주행하기 어려운 경로가 생성될 수 있으며, 반대로 폭이 너무 넓으면 계산 시간이 불필요하게 길어질 수 있다. 따라서 본 연구에서는 차량의 동역학적 특성과 주변 환경의 제약을 반영한 적정한 복도 폭을 설정하여 경로 탐색의 효율성을 극대화하고자 한다. 구체적으로는 차량의 회전 반경을 고려하여 복도의 폭을 설정하고, 장애물과의 최소한의 안전거리를 확보함으로써 차량이 원활하게 주행할 수 있는 경로를 보장한다.
복도는 RRT로 생성된 초기 경로를 기준으로 일정한 거리만큼 양옆에 Buffer Zone을 형성하여 생성된다. 초기 경로의 각 지점에서 일정한 거리를 두고 Grid를 확장하여 복도를 설정하며, 이 복도 내에서만 후속 경로 최적화를 수행하게 된다. 복도를 생성함으로써 경로 탐색 범위를 제한할 수 있어 전체 탐색 공간을 줄이고, 불필요한 계산을 감소시킬 수 있다. 복도 범위는 차량의 크기와 회전 반경을 고려하여 RRT로 생성된 초기 경로의 중점으로 차량 전폭의 2배 범위의 주변 격자를 복도로 설정하여 분석하였다. 복도생성 알고리즘의 구조는 Table 3와 같다.
Table 3.
Corridor generation code based on initial path midpoint
Figure 5와 같이 복도를 설정함으로써 얻을 수 있는 가장 큰 이점은 경로 탐색 과정의 계산 효율성이다. 전체 경로를 탐색하지 않고, 복도로 지정된 제한된 구역 내에서만 경로 최적화를 진행함으로써 계산량을 줄일 수 있다. 이는 특히 복잡한 환경에서 계산 시간을 단축하는 데 크게 기여한다.
결론적으로, RRT 알고리즘으로 생성된 초기 경로 주변에 복도를 설정하는 것은 경로 탐색의 효율성을 높이는 데 중요한 역할을 한다. 복도를 설정함으로써 경로 탐색의 범위를 제한하고 계산량을 줄이면서도 차량의 실제 주행 가능성을 고려한 경로 최적화가 가능하다. 이후 단계에서는 이 복도를 기반으로 Hybrid A-star 알고리즘을 적용하여 최종 경로를 최적화할 예정이다.
Step 3: 복도기반 Hybrid A-star 알고리즘 경로 생성
본 연구의 세 번째 단계에서는 복도 범위 내에서 Hybrid A-star 알고리즘을 사용하여 경로를 생성한다. 본 연구에서 Hybrid A-star 알고리즘을 사용한 이유는 선행 연구들에서 A-star 알고리즘이 주차 경로 생성에서 범용성과 효율성 측면에서 적합한 알고리즘으로 평가되었기 때문이다. 그러나 A-star 알고리즘은 차량의 동적 특성을 반영하지 못하는 단점이 있다. 이를 보완하기 위해 Hybrid A-star 알고리즘을 사용하였으며, 이는 차량의 물리적 제약을 반영하여 현실적이고 실행 가능한 경로를 생성할 수 있도록 한다.
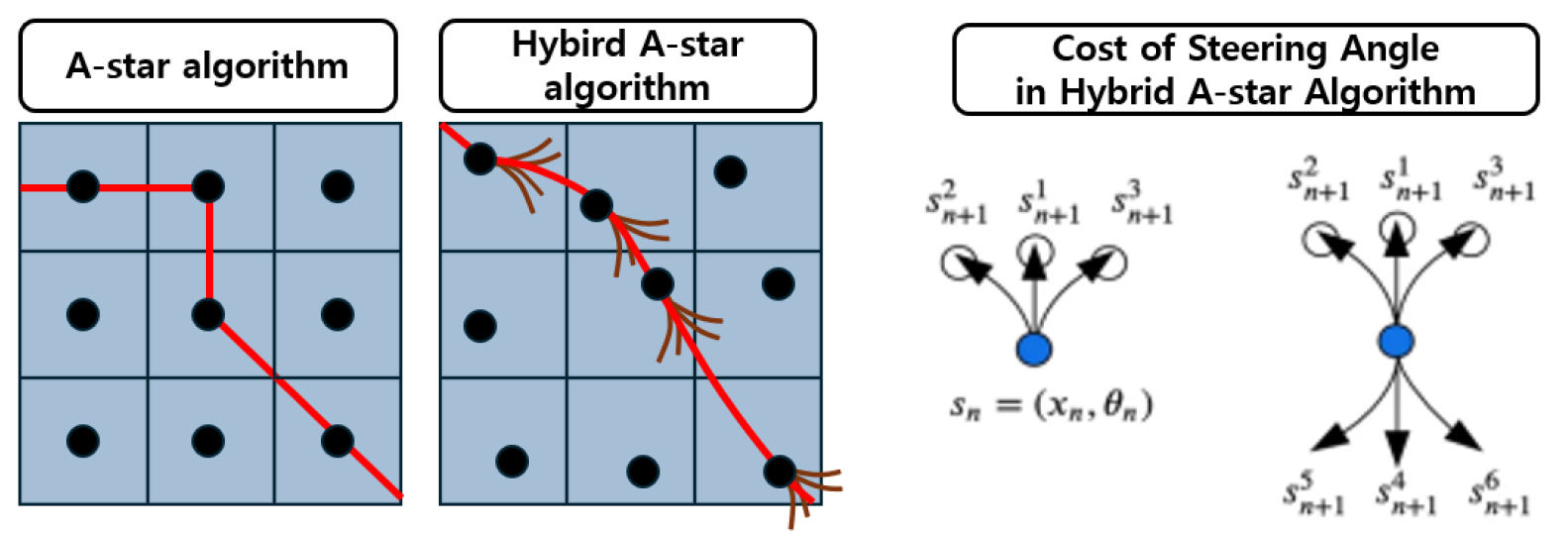
Hybrid A-star 알고리즘은 차량의 동적 특성을 반영할 수 있어 장애물 회피에 효과적이며, 현실적으로 실행 가능한 경로를 생성할 수 있다는 장점이 있다. Hybrid A-star 알고리즘은 전통적인 A-star 알고리즘의 강화된 버전으로, 차량의 연속성을 고려하여 휴리스틱 계산을 수행하고 기본 A-star 알고리즘은 노드 기반의 탐색 방법으로, 주어진 시작점과 목표점 간의 최단 경로를 찾기 위해 각 노드의 비용을 평가한다. 반면, Hybrid A-star 알고리즘은 차량의 동적 특성을 반영하여 연속적인 상태 공간을 탐색한다(Kim et al., 2024).
이 알고리즘은 Figure 6처럼 차량의 회전 반경과 조향각을 고려하여 경로를 생성하고 각 노드의 비용 함수는 차량의 동적 특성을 포함하여 설정되며, 이를 통해 경로 탐색의 정확성을 높인다. 비용 함수는 유클리드 거리 기반으로 설정하였고 경로 탐색 중 거리가 증가함에 따라 비용이 선형적으로 증가하도록 설정하였다. 특히, 후진 시에는 추가적인 비용이 부과되도록 설계하여 전진 경로를 우선적으로 탐색하도록 유도하였다. 조향각의 변화가 없을 경우에는 추가 비용이 발생하지 않으나, 조향각이 변경될 경우에는 이를 반영한 회전 비용이 추가되도록 설정하였다. 또한, 경로의 비효율적 루프를 방지하기 위해 동일한 노드를 재방문할 경우 추가 비용을 부여하였다. 이러한 설정은 효율적인 탐색을 보장하며, 차량의 동역학 및 환경 조건을 고려한 경로 생성을 가능하게 한다.
그러나 이러한 동적 특성을 반영하는 과정은 계산량을 증가시키고 경로 생성 시간을 늘리는 단점이 있다. 특히 복잡한 환경에서 차량의 물리적 제약을 고려하면서 효율적인 경로를 탐색하는 것은 시간과 자원의 소모를 초래할 수 있다.
Figure 7과 같이 복도 범위 내에서 경로 탐색을 수행하는 것은 여러 가지 장점을 제공한다. 첫째, 일반적인 Hybrid A-star 알고리즘은 여러 방향의 경로를 탐색하기 때문에 많은 노드를 계산해야 하지만, 복도 구간만 고려함으로써 불필요하게 계산되는 노드가 없다. 이에 따라 계산하는 노드의 수가 줄어들어 전체 탐색 공간이 감소하고, 계산 복잡도가 낮아져 경로 생성 시간이 단축된다. 둘째, 복도 설정을 통해 탐색 범위를 제한함으로써 알고리즘이 더 빠르게 수렴할 수 있어 실제 주행 가능한 경로를 보다 신속하게 찾을 수 있다. 이러한 방식은 불필요한 계산을 줄이고, 더 적은 자원으로도 효율적인 경로 생성을 가능하게 하는 장점이 있다. 복도를 산정해 계산하는 노드의 범위를 줄이는 것은 Hybrid A-star 알고리즘의 계산량이 많아 계산시간이 길어지는 한계점을 보완하고 경로 생성 시간을 고려하여 격자의 크기를 더 낮출 수 있다. Hybrid A-star 알고리즘의 구조는 Table 4와 같다
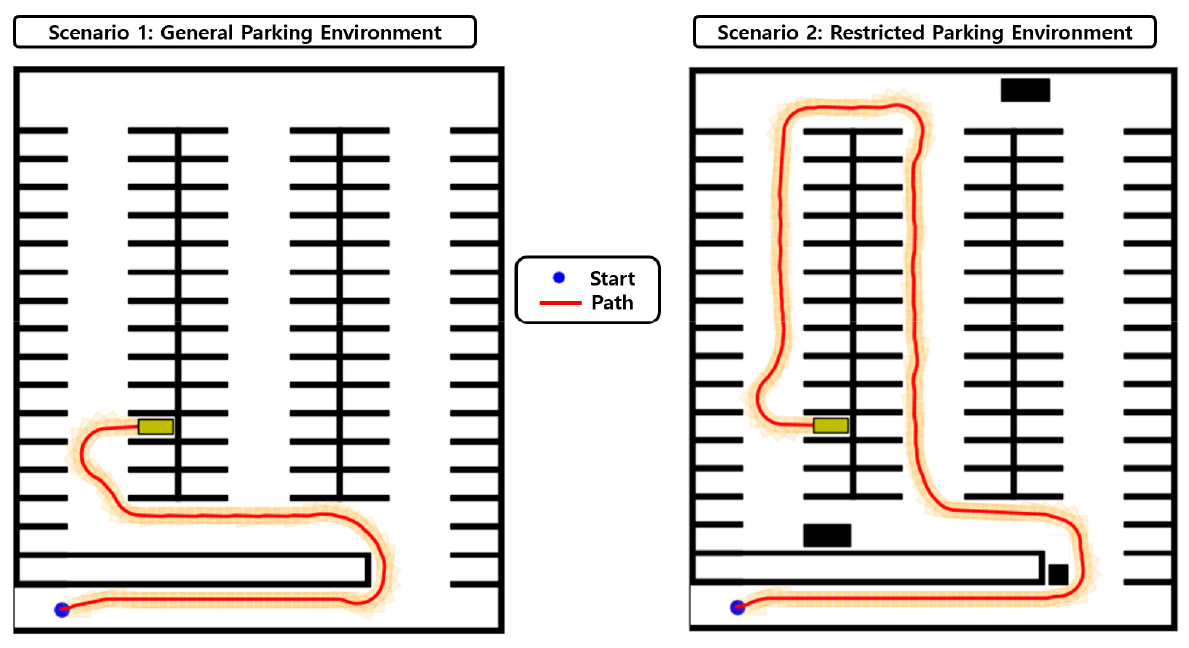
Table 4.
Hybrid A-star algorithm flow
모형 적용 및 분석 결과
1. 실험 및 모델 검증을 위한 시나리오 구성
모델을 검증하기 위해, 시나리오는 실제 복정역 공영주차장을 기반으로 구성하였다. 주차장의 출입구는 하나로 설정하며, 각 주차 공간의 간격은 주차장법 및 시행규칙에 따라 일반형으로 폭 2.5m, 길이 5m로 설정하였다. 또한, Figure 8처럼 주차장 내에서 주차 동선에 장애물이 없는 일반적인 주차 환경 시나리오와 주차 경로에 주정차된 차량이나 보행자와 같은 장애물이 있는 제한적인 주차 환경 시나리오로 구분하였다.
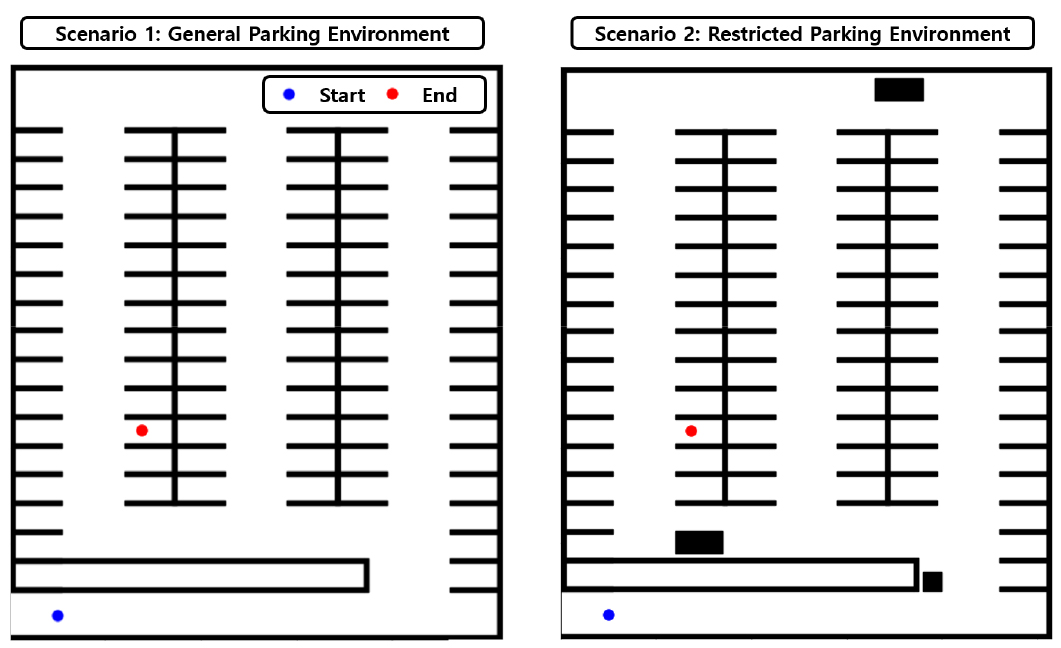
제한적인 주차 환경을 검증하는 이유는 장애물 회피 능력과 유연성을 확인하기 위함이다. 검증 차량으로는 현대의 캐스퍼, 엑센트, 쏘나타, 제네시스 GV80을 사용하며, 이는 경형, 소형, 중형, 준대형 차량의 다양한 크기를 반영하기 위함이다. 해당 차량들의 크기는 Figure 9의 LiDAR 센서를 이용한 PointPillars 방식으로 측정하며, 사용된 LiDAR 센서는 Benewake사의 TFmini Plus를 사용한다. 측정된 차량 크기는 제조사의 제원과 비교하며, 전장에서는 최대 0.57%의 오차율을, 전폭에서는 최대 1.7%의 오차율을 보였다. 이는 사이드미러를 반영한 결과로 분석된다. Grid의 크기를 0.1m로 설정했을 때 각 차량의 반영된 크기는 Table 5와 같으며, 이는 차량 크기별로 차별화된 경로를 생성할 수 있는 수치임을 보여준다.

Table 5.
Results of vegicle size measurement using the pointpillars method
2. 모델 검증 결과
모델 검증을 위해 차량 크기에 따른 Grid 크기별 경로를 비교하고, RRT 혼합 기반 Hybrid A-star 모델이 기존 모델 대비 경로 생성 및 시간 절감에 미치는 영향을 분석하였다. 먼저, Grid 크기를 0.1m로 세분화하여 다양한 차량 크기별 경로 차이를 비교하고, 장애물 환경에서의 경로 생성 방식을 살펴보았다. 이후, RRT를 결합한 Hybrid A-star 모델의 도입을 통해 기존 알고리즘과 비교하여 경로 생성 시간 및 성능 개선 효과를 평가하였다. 이를 통해 제안된 모델이 계산 복잡도를 줄이면서도 경로 최적화와 시간 효율성을 어떻게 향상시키는지를 검토하였다.
1) Grid 세분화에 따른 차량 크기별 경로 비교
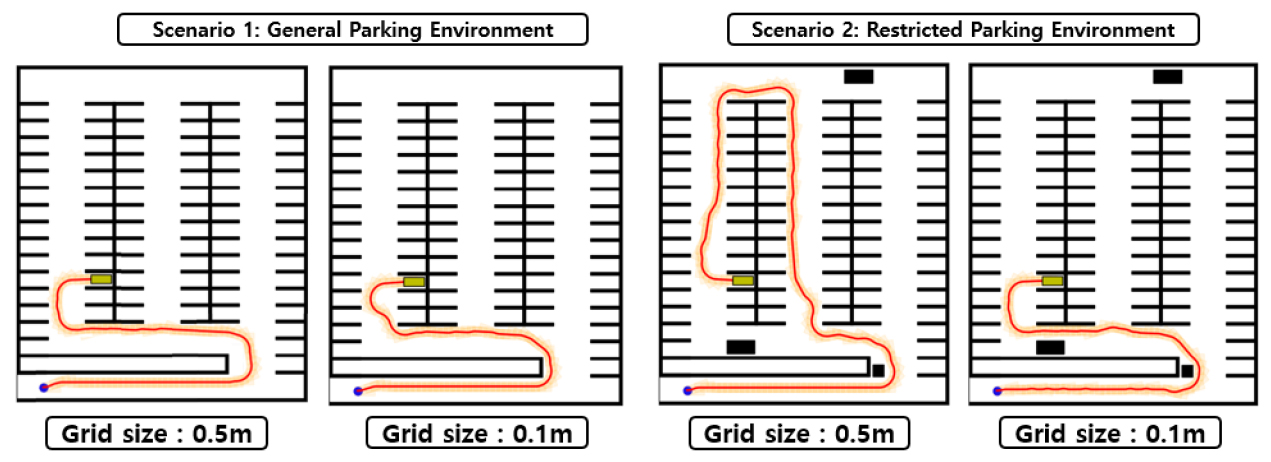
기존의 Hybrid A-star 알고리즘을 이용한 경로 생성 연구들은 주로 0.5m 크기의 grid를 사용해왔으나, 이 경우 다양한 차량 크기와 형태를 정확하게 반영하기에 어려움이 있었다. 특히, 크기가 다른 차량 간의 차별화된 경로를 생성하는 데 한계가 있었다. 본 연구에서는 이러한 한계점을 개선하기 위해 grid의 크기를 0.1m로 세분화하였고, 이를 바탕으로 차량 크기에 따른 경로 생성을 비교하였다.
먼저 Table 6을 살펴보면 일반적인 주차장 환경에서 시뮬레이션한 결과, grid 크기가 0.5m일 경우 엑센트, 쏘나타, GV80과 같은 서로 다른 크기의 차량들이 동일한 크기로 반영되었으며, 결과적으로 같은 경로가 생성되었다. 그러나 grid 크기를 0.1m로 줄였을 때는 전체적인 경로는 유사하였으나, 차량마다 경로가 미세하게 달라졌고, 경로 거리가 최대 11.1%까지 감소하는 효과를 확인할 수 있었다. 이는 차량 크기를 더 정밀하게 반영함으로써 불필요한 경로가 줄어든 결과로 볼 수 있다.
Table 6.
Comparison of parking path distances for different vehicle types (Grid size: 0.5m, 0.1m)
장애물이 있는 제한적인 환경에서의 시뮬레이션 결과도 유의미했다. grid 크기가 0.5m 일 때, 캐스퍼를 제외한 다른 차량들은 차량과 장애물의 크기가 과다하게 반영되어 경로를 탐색하지 못하는 경우가 발생하였다. 그러나 grid 크기를 0.1m로 세분화한 경우, 모든 차량이 경로를 성공적으로 찾을 수 있었고, 특히 캐스퍼의 경우 경로 거리가 48.8%까지 감소하였다. 이는 차량 크기를 더 섬세하게 반영함으로써 기존의 경로가 아닌 더 최적화된 최단 경로를 생성한 결과로 해석할 수 있다. 생성된 경로는 Figure 10에 제시되어 있다.
본 연구의 결과는 차량 크기를 세분화하여 반영함으로써 기존 경로 생성의 한계를 극복할 수 있음을 보여주며, 주차 경로 거리의 단축, 장애물 회피 능력, 그리고 경로 생성 시간의 효율성 측면에서 주차 로봇의 성능을 크게 향상시킬 수 있음을 알 수 있다.
2) RRT 혼합 기반 Hybrid A-star 경로 생성 모델의 시간 절감 및 성능 평가
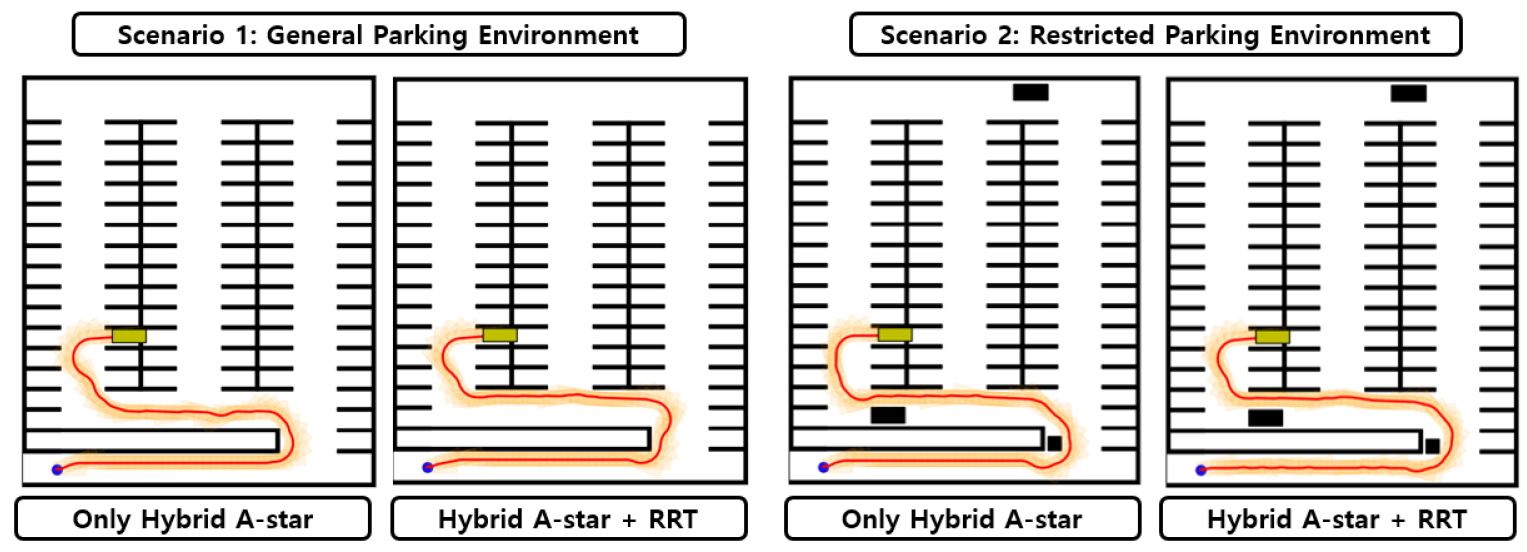
기존의 Hybrid A-star 알고리즘은 격자 크기를 0.1m로 세분화함으로써 매우 정교한 주차 경로를 생성할 수 있었으며, 이로 인해 장애물 회피 성능이 개선되고 최적 경로에 가까운 결과를 도출할 수 있었다. 그러나 격자 크기를 줄일수록 계산해야 할 노드 수가 급격히 증가하여 계산 복잡도가 높아지는 문제가 발생하였고, 이는 실시간으로 차량의 크기를 고려하여 경로 생성하는 데 한계가 있다.
본 연구에서는 이러한 문제를 해결하기 위해 Hybrid A-star 알고리즘과 RRT 알고리즘을 결합한 모델을 제안하였다. 이 모델은 격자 크기를 0.1m로 유지하면서도 계산해야 할 노드 수를 제한하여 계산량과 계산 복잡도를 줄이는 방식으로 경로 생성 효율성을 높였다. Table 7에 제안된 모델을 기존 Hybrid A-star 알고리즘과 비교한 결과, 기존 알고리즘은 제한적인 환경에서 경로 생성에 평균 117.5초가 소요된 반면, 제안된 모델은 27.2초로 경로 생성 시간이 76.9% 감소하였다. Figure 11과 같이 비슷한 경로가 생성되었으나 경로 거리는 기존 알고리즘 대비 1.6% 증가하였으며, 이는 RRT 알고리즘으로 생성된 초기 경로에서 복도의 범위가 모든 격자를 고려되지 않아 나타난 결과로 분석된다.
Table 7.
Comparison of path generation : existingand vs. algorithm (Hybrid A-star + RRT)
결론적으로, 본 연구는 차량과 장애물의 크기를 더욱 정밀하게 반영하면서도 경로 생성 시간을 대폭 단축함으로써, 주차 로봇이 실시간으로 차량 크기에 맞는 경로를 생성할 수 있는 방안을 제시하였다. 이는 실시간으로 크기를 고려하여 주차 경로 생성 시 효율을 크게 향상시킬 수 있다.
결론
본 연구에서는 주차로봇의 주차 경로 생성 과정에서 차량 제원의 다양성을 보다 효과적으로 반영할 수 있는 새로운 방법을 제안하였다. 기존의 경로 생성 알고리즘에서 사용되었던 모델의 최소 단위인 Grid 크기는 차량의 실제 크기를 반영하지 못하는 한계가 있었다. 이로 인해, 특정 차량의 크기와 경로 생성 간의 불일치로 인해 경로를 성공적으로 생성하지 못하는 사례가 발생했다. 본 연구는 이러한 문제를 해결하고자 Grid의 최소 단위를 줄여 더 작은 단위로 차량의 크기를 구분하고, 이를 통해 차량 크기별로 차별화된 경로를 구성할 수 있도록 하였다. Grid의 크기를 줄임으로써 차량의 크기와 장애물을 더 섬세하게 반영할 수 있었지만, 그 결과 경로 생성 시간이 증가하는 문제가 발생하였다. 이를 해결하기 위해 본 연구는 RRT(Rapidly-exploring Random Tree) 알고리즘과 Hybrid A-star 알고리즘을 혼합한 방식을 도입하였다. RRT 알고리즘을 활용하여 경로 탐색의 초기 과정을 신속하게 수행한 후, Hybrid A-star 알고리즘을 적용하여 세밀한 경로를 탐색하는 방식으로 경로 생성 시간을 단축하고, 최적의 경로를 탐색할 수 있었다. 이와 같은 혼합 방식은 경로 탐색의 효율성과 정확성을 동시에 확보할 수 있는 효과적인 방법을 제시하였다. 또한, 본 연구에서는 라이다 센서를 이용하여 차량의 크기를 실시간으로 검출하고, 이 데이터를 경로 생성에 반영하였다. 이를 통해 주차 로봇은 매번 차량 제원에 따라 맞춤형 경로를 생성할 수 있었으며, 다양한 크기의 차량에 대해 유연하게 대응할 수 있는 경로를 탐색하는 데 성공하였다. 이러한 접근은 주차로봇의 효율성과 실용성을 한층 더 강화시킬 수 있을 것으로 기대된다. 결론적으로, 본 연구에서 제안한 방법은 기존의 Grid 기반 경로 생성 알고리즘의 한계를 극복하며, 차량의 크기와 장애물 특성을 보다 정밀하게 반영함으로써 주차 경로 생성의 정확성을 향상시켰다. 또한 RRT 알고리즘과 Hybrid A-star 알고리즘의 혼합 방식을 도입하여 경로 생성 시간을 줄이는 동시에 최적 경로를 탐색할 수 있는 방법을 제시하였다. 이러한 결과는 향후 자율주차 시스템의 성능 향상에 중요한 기여를 할 것으로 예상되며, 실시간 차량 크기 인식을 통한 경로 생성 최적화 기술은 다양한 자율주차 분야에서 활용 가능성이 클 것으로 판단된다.
