

서론
선행연구 고찰
1. 자율-비자율 혼합교통류 안전성 연구
2. 도로 설계요소 별 AV의 주행안전성 연구
3. 도로 인프라 안전성 통합 평가 방법론 개발 연구
4. 시사점 및 연구의 차별성
도로 안전성 평가 방법론
주행-교통류 연계 시뮬레이션
1. 미시교통시뮬레이션 네트워크 및 시나리오 설계
2. AV를 추종하는 MV 주행행태 모델링을 위한 MADS 실험
3. 미시교통시뮬레이션에서의 MV 및 AV 주행행태 구현
분석 결과
1. 주행안전성 평가지표 선정 및 가중치 산출 결과
2. MADS 기반 차량 pair 별 주행행태 분석 결과
3. AV를 추종하는 MV 주행행태 모델링 결과
4. 도로 안전성 취약구간 안전성 평가 결과
결론 및 향후 연구 과제
서론
자율주행 차량(autonomous vehicle, AV)이 도입됨에 따라 혼합교통류 환경이 도래하였다. 혼합교통류 환경은 AV와 비자율차량(manually-driven vehicle, MV)이 공존하는 교통 상황으로 정의된다. Litman(2023)에 따르면 AV의 시장 점유율(market penetration rate, MPR)은 2026년까지 50%를 넘지 못하여 장기간 혼합교통류 환경이 지속될 것으로 전망하였다. AV의 주행행태는 운전자 조작에 의한 비자율차량의 주행행태와 근본적인 차이가 존재한다(Thorn et al., 2018). AV와 MV의 주행행태에서 가장 큰 차이점은 차량 모션 제어이다(Xu et al., 2022). AV는 센서 데이터에 기반한 인지, 반응, 판단 알고리즘에 따라 차량의 거동이 제어되어 주행행태가 매우 일관적이지만 MV는 운전자의 판단과 경험에 기반하여 의사결정이 이루어지며 주변 환경적 요인에 따라서도 주행행태가 크게 변화한다(Faria et al., 2020; Jo and Oh, 2023a). 또한, AV는 알고리즘에 따라 주행할 뿐 아니라 인지반응 시간도 0.2초 수준으로 매우 짧다(Aryal, 2020). 반응 시간의 차이는 AV의 긴급 제동 및 차선 변경이 MV 운전자의 대응에 영향을 주어 후방 추돌 사고를 유발할 수 있다. 이러한 주행행태의 차이로 인해 Jo and Oh(2023b)은 V2X 통신 지원 여부 및 차량제어 주체에 따라 AV와 MV, 협력차와 자율협력차로 차종을 구분하기도 하였다. 교통 시스템에 새로운 차종이 혼입될 경우 AV를 추종하는 MV의 거동에도 영향을 미칠 뿐 아니라 교통류에 변화가 발생하므로 혼합교통류의 주행안전성 연구가 필요하다.
AV가 안전하게 주행할 수 있는 구간을 지정하기 위해서는 평면곡선 반지름, 평면곡선부의 길이, 편경사 등 도로의 기하구조를 고려해야 한다(Jung et al., 2023). 기존 도로 인프라 시설과 안전성 평가 방법은 인간 운전자 중심으로 설계되어 자율-비자율 혼합교통류 환경을 평가하는 데 한계가 있다. AV 상용화를 위해 단순히 자율주행차의 운행을 허용하는 것이 아니라 안전한 혼합교통류 환경을 조성하기 위한 명확한 기준과 절차가 필요하다. 따라서, 본 연구는 연속류 혼합 교통류 환경에서 상대적 안전성이 취약한 도로 인프라를 식별하는 방법론을 고안하였다. 본 연구에서 도로 인프라는 서로 다른 도로 설계 요소를 가진 구간으로 정의하였으며 도로 설계 요소는 도로 선형을 포함한 기하구조와 도로 시설물을 의미한다. 본 연구에서 고려한 분석 대상 도로 기하구조는 평면곡선 반지름과 평면곡선 길이, 종단 경사, 복합 선형 등이고 도로 시설물은 연결로(직결형, 트럼펫형, 클로버형), 가·감속차로 유형(평행식, 직접식), 자율주행 전용차로(최우측, 최좌측)를 포함한다. 대상 구간에 AV가 점진적으로 증가할 때 도로 인프라의 주행안전성을 정량적으로 평가하기 위한 방법론을 고안하였다.
본 연구에서는 시뮬레이션 기반의 도로 인프라의 주행안전성을 평가하기 위해 평지의 직선구간 대비 다른 도로 설계 요소의 평가지표 상대적 변화량 개념을 적용하였다. 평가지표별 상대적 변화량을 정규화한 값을 안전성 취약 점수(safety penalty, SP)로 정의하였다. 최종적으로 도로 설계 요소 간 상대적 안전성을 효과적으로 평가하기 위한 통합 평가지표 integrated risk score(IRS)를 개발하였다. IRS 지표를 구성하는 개별 평가지표는 실제 사고위험도를 효과적으로 정량화하기 위해 고속도로 사고 건수와 평가지표 산출 값을 상관분석하여 선정하였다. 개별 평가지표는 가중치와 정규화된 SP 값을 곱한 후 합산하는 방식으로 통합하였다. 가중치는 램덤 포레스트 분류 모델에서 각 평가지표가 위험집단 분류에 미치는 영향력을 의미하는 mean decrease gini(MDG) 값의 비율로 정의하였다. AV의 MPR 변화에 따른 혼합교통류 환경에서 실제 AV와 MV의 상호작용 데이터를 취득하기 어려운 한계를 극복하기 위해 주행 시뮬레이션과 교통 시뮬레이션을 연계하였다. 본 연구는 주행행태를 기반으로 도로 인프라 안전성을 평가하므로 차량의 거동을 현실성 있게 모사하는 것이 중요하다. 2대의 주행 시뮬레이션이 실시간으로 연동된 멀티 에이전트 주행 시뮬레이션(multi-agent driving simulation, MADS) 실험으로 AV를 추종하는 MV의 주행행태 데이터를 수집하였다. MADS 기반의 MV 거동을 VISSIM-COM interface 기능으로 미시교통시뮬레이션(microscopic traffic simulation)에 반영하였다. AV의 MPR 변화가 혼합교통류의 주행안전성에 미치는 영향을 평가하기 위해 미시교통시뮬레이션을 사용하였다.
본 논문의 구성은 다음과 같다. 2장에서는 혼합교통류 환경과 도로 인프라 안전성에 관한 선행 연구를 고찰하였다. 3장 방법론에서는 주행-교통류 연계 시뮬레이션과 본 연구에서 개발한 도로 인프라 평가 방법론을 상세히 제시하였다. 4장 분석 결과에서는 AV의 MPR별 IRS 안전성 취약 구간과 IRS 순위에 따른 상대적 안전성 변화 패턴 4가지를 제시하였다. 5장 결론에서는 연구 요약 및 향후 연구 방향을 기술하였다.
선행연구 고찰
본 연구의 목적은 자율-비자율 혼합교통류 환경에서 AV의 MPR 변화가 도로 인프라 교통류 주행안전성에 미치는 영향을 평가하는 방법론을 개발하는 것이다. 선행된 자율-비자율 혼합교통류 안전성 연구, 도로 설계요소 별 AV의 주행안전성 연구, 도로 인프라 안전성 통합 평가 방법론 개발 연구를 고찰하여 시사점과 본 연구와의 차별성을 제시하였다.
1. 자율-비자율 혼합교통류 안전성 연구
실도로 자율-비자율 혼합교통류 환경의 데이터 수집 한계를 극복하기 위해 시뮬레이션을 활용한 연구가 다수 수행되었다(Zheng et al., 2024; Jung et al., 2023; Calvi et al., 2022; Li et al., 2022; Hu et al., 2021; Arvin et al., 2020). Lee et al.(2024)는 혼합교통류 상황인 도심부 도로에서 AV의 MPR이 증가할 때 변화하는 주행안전성 취약 구간을 식별하였다. AV-MV pair는 MV-MV pair보다 주행안전성이 높았으며 가장 안전성이 취약한 구간은 비신호 교차로로 도출되었다. Chen et al.(2024)는 고속도로 합류 지점의 AV 안전성을 평가하기 위해 다양한 차량 추종 모델을 통합한 co-simulation 플랫폼을 개발하였다. 안전성 분석을 통해 AV의 MPR이 증가함에 따라 고속도로 합류 지역에서 상충 가능성이 감소하는 결과를 도출하였다. Jin et al.(2023)은 VISSIM COM으로 구현된 자율-비자율 혼합교통류 환경에서 고속도로 병목 지점에서 교통 안전성과 효율성을 향상을 위한 가변 속도 제한 모델링 프레임워크를 제시하였다. Li et al.(2023)는 자율-비자율 혼합교통류 환경에서 AV의 MPR에 따른 엇갈림 구간의 최적 차로 변경 지점을 도출하였다. 시뮬레이션 상에서 AV와 MV가 급진적으로 또는 보수적으로 차로 변경할 때 변화하는 교통 용량을 기준으로 최적 지점을 선정하였다. 선행 연구에서 실도로 AV-MV의 상호작용 데이터 수집의 한계를 극복하기 위해 시뮬레이션 연구가 활발히 진행되고 있다. 시뮬레이션을 통한 자율-비자율 혼합교통류 안전성 연구는 실제 도로 상황에서 발생할 수 있는 다양한 시나리오를 안전하게 검토할 수 있는 장점을 제공한다.
2. 도로 설계요소 별 AV의 주행안전성 연구
기존 연구에서 수행된 도로 설계요소 별 AV의 주행안전성 연구를 검토하였다. Kang and Lee(2002)는 다양한 평가지표를 포함하는 도로 기하구조 및 시설물과 교통사고의 관계를 규명하는 위험도 평가 모형을 구축하였다. 호남고속도로를 대상으로 직선부, 곡선부, 완화곡선부 등 구간의 선형 요소에 따라 구분한 뒤 교통사고 자료와 매칭하였다(Korea Expressway Corporation, 2022). 다중회귀분석과 군집분석을 수행한 결과 선형 유형별 사고빈도 모형을 도출하였다. Tu et al.(2023)은 AV가 복잡한 도로에서 높은 위험성을 수반할 수 있으므로 다양한 도로 구간의 위험성을 정량화하는 것이 중요함을 강조하였다. 베이지안 네트워크에서 파생된 영향 계수와 중국 상하이 도로의 AV 테스트 데이터를 활용한 4 수준 도로 안전성 분류를 수행하였다. García et al.(2020)은 부분자율주행차(semi-AV)가 도로의 평면선형을 따라 주행할 때 자율주행 제어권 전환이 잦은 구간에서 사고 위험이 높다고 판단하였다. 두 편의 논문에서 실도로 구간의 도로 설계 요소에 따른 AV의 주행안전성을 분석하였다. 첫 번째 논문 García et al.(2020)에서 서로 다른 평면선형 조건을 가진 실도로 구간에서 자율주행 제어권 전환이 발생하는 AV의 임계속도를 도출하였다. 두 번째 논문 García and Camacho-Torregrosa(2020)에서 차로 폭이 lane keeping assist 시스템에 미치는 영향을 분석하였다. Chen et al.(2023)은 도로 인프라가 매핑, 인식 및 모션 계획을 포함한 AV의 기능을 발휘하는 데 주요한 영향을 미친다고 주장하였다. 도로 인프라 수준을 Dedicated guideway, expressway, well-structured road, limited-structured road, disorganized area 4가지로 구분하여 인프라 수준에 따른 AV 분류법을 제시하였다. Cai et al.(2024)는 서로 다른 기상 조건과 수직 곡선 반경을 가진 고속도로 구간에서 LiDAR 기반 자율주행안전성을 평가하였다. 다양한 연구에서 도로 설계 요소에 따른 AV의 주행안전성 영향력을 분석하였다. 이러한 연구는 AV의 안전한 주행을 위한 도로 설계 요소 및 인프라 연구가 필요함을 강조한다.
3. 도로 인프라 안전성 통합 평가 방법론 개발 연구
Jung et al.(2023)은 자율-비자율주행 혼합교통류 환경에서 주행안전성을 평가하는 기법을 개발하였다. 연속류 도로 기하구조 및 시설물 18개 구간을 대상으로 평지의 직선구간(baseline) 대비 spacing 표준편차의 변화율을 기반으로 안전성을 평가하는 relative evaluation by baseline(REB) 기법을 개발하였다. REB 산출 값을 정규화한 도로 위험도를 산출하였다. 또한, 고속도로 노선별 안전성 점수를 정량화하는 risk score 기법을 제시하였다. 도로 인프라 안전성 평가를 위해 하나의 평가지표를 사용한 점에서 한계가 있었다. 미국 Federal Highway Administration(FHWA)는 고속도로 기하구조 설계 시 안전성 및 운영성을 평가하는 interactive highway safety design module 통합 설계 모듈을 개발하였다. 이는 의사결정을 효율적으로 지원하기 위한 도구로써 데이터 기반의 상충 예측, 설계 일관성, 정책 검토, 교통 분석 등을 수행하는 프로그램이다. Shin and Kim(2019)는 양방향 2차로 도로의 시설개량 기준 마련을 위해 기존 도로의 종합적인 안전성 평가를 위한 방법을 제시하였다. 각 평가 항목의 가중치를 부여와 안전지수 산출을 위한 교통사고 발생 현황과 전문가 analytic hierarchy process 설문 평가를 수행했다. 안전지수는 위험 구간을 판정할 수 있는 기준으로 삼아 위험 구간 연장 비율에 따른 종합위험도를 산출하였다. 선행 연구에서는 도로 인프라 안전성 평가의 통합적 접근 방식을 개발하는 것이 중요함을 시사하였다. 그러나 안전성 평가 목적에 따라 상대 변화율, 가중치 부여, 통계 분석, 머신러닝, 데이터 분석 등의 기법을 적용한 방법론을 개발하였으나 혼합교통류 상황을 고려한 연구는 미흡하였다.
4. 시사점 및 연구의 차별성
기존에 머신러닝, AHP 등 다양한 기법을 접목한 도로 인프라 평가 방법론이 개발되었으나 AV의 MPR을 고려한 자율-비자율 혼합교통류 환경에 적용 가능한 평가 방법론은 미흡하였다. 혼합교통류의 신뢰성 있는 시뮬레이션 필요성이 대두됨에 따라 본 연구는 MADS 기반의 MV 주행행태를 수집한 점에서 차별화된다. 혼합교통류의 안전성은 부분적으로 도로 인프라에 의해 영향을 받는다. 선행 연구에서는 도로 평면선형, 차로 폭 변화에 따른 AV 주행안전성 연구가 수행되었다. 본 연구는 다양한 도로의 기하구조 및 시설물을 대상으로 AV의 MPR 변화에 따른 혼합교통류 환경에서의 연속류 도로 인프라 주행안전성 평가 방법론을 개발하였다는 점에서 기존 연구와 차별성이 있다. 또한, 다수의 선행 연구에서는 안전성 분석을 위해 개별 시뮬레이션을 활용하였으나 본 연구는 MADS와 미시교통시뮬레이션 연계하였다는 점에서 차별성이 있다.
도로 안전성 평가 방법론
본 연구는 도로 설계 요소와 AV의 MPR별 도로 인프라 안전성을 정량적으로 평가할 수 있는 통합 평가지표 기반의 방법론을 제시한다. Step 1은 평지의 직선구간인 baseline의 주행안전성 평가지표와 다른 도로 설계 요소의 평가지표의 상대적 변화량을 산출하는 단계이다. Step 2는 평가지표별 원단위 표를 산출하기 위해 상대적 변화율을 정규화하는 단계이다. Step 3은 위험도 점수인 IRS를 산출하기 위해 평가지표를 통합하는 단계이다. 최종적으로 MPR에 따른 안전성 취약 구간 순위가 도출된다. 도로 인프라 안전성 평가 방법론을 Figure 1에 제시하였다.
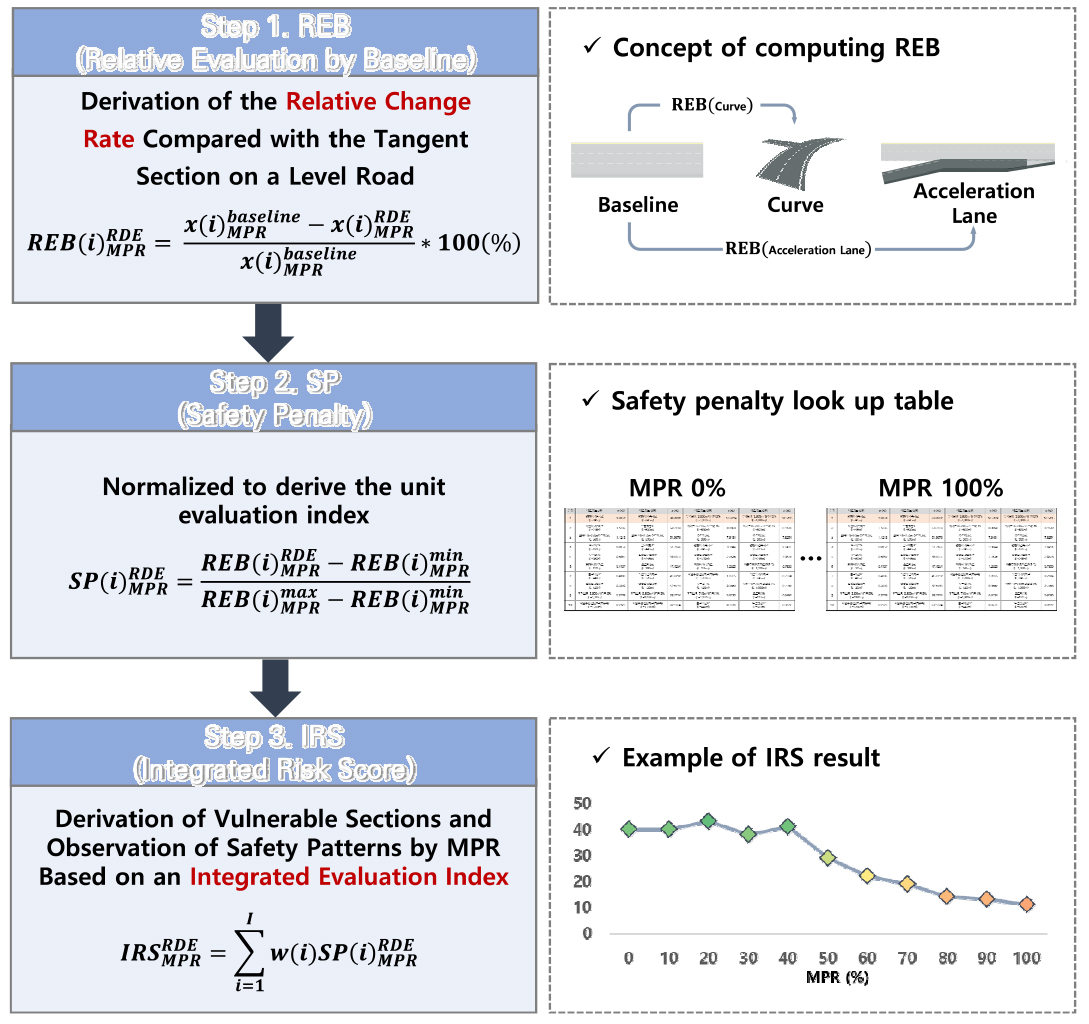
Step 1 안전성 평가지표 REB 산출은 시뮬레이션을 활용한 도로 인프라의 주행안전성을 상대 평가하기 위한 절차이다. 본 연구에서는 도로의 기하구조 및 시설물 유형으로 도로 구간을 분류하였다. 분석 구간의 안전성을 상대적으로 비교하기 위해 기준 구간을 평지의 직선구간으로 선정하였다. 평지는 종단경사가 0%로 시거가 원활한 구간이다. 이 구간에서는 운전자에게 강제적인 가·감속이 요구되지 않는다. 직선도로 구간은 차로 변경을 수행하지 않으면 운전자의 핸들 조향 조작이 최소화되는 구간으로 변동성이 낮아 가장 기본적인 주행행태를 보이는 구간이다. 선행 연구인 Jung et al.(2023)에 적용된 REB 기법에서도 기준 구간을 평지의 직선구간으로 설정한 사례가 있다. REB 기법을 적용할 경우 평가기법을 범용적으로 도입할 수 있다. 각 평가지표별 REB 산출식은 Equation 1에 제시하였다. 는 평가지표(i= 1, 2, ..., n), 는 평지의 직선구간 대비 평가지표 의 변화율(%), RDE는 도로 설계 요소 (road design element), 와 는 각각 평지의 직선구간에서의 평가지표 의 값과 도로 설계 요소별 평가지표 의 값이다.
Step 2 평가지표의 정규화는 도로 설계 요소별 REB 값의 범위가 달라 직접적인 비교가 어려운 문제를 해결하기 위한 절차이다. 개별 평가지표의 산출 범위가 다르므로 일관된 기준에 따라 비교 가능하게 만드는 과정이 필수적이다. 평가지표별 최소-최대 정규화(min-max normalization)한 0-1 사이 값을 안전성 취약 점수인 SP로 정의하였다. SP는 도로 설계 요소 및 MPR별로 Equation 2과 같이 산출된다. 는 SP(정규화된 평가지표 ), , , 는 각각 도로 설계 요소별 평가지표 의 REB 값, 최대값, 최소값이다. MPR은 자율주행 혼입률(0%, 10%, …, 100%), RDE는 1-41번까지의 도로 설계 요소를 의미한다.
Step 3 IRS 도출은 종방향 및 차량 간 상호작용에 대한 통합 평가를 위한 절차이다. 평가 대상에 포함되는 다양한 도로 설계 요소를 개별적으로 평가하는 것은 중요하지만 통합적인 접근 방식을 통해 일관적인 안전성 평가 기준을 마련하는 것이 필요하다. 도로 설계 요소마다 안전성이 저하되는 다양한 요소가 있을 것이다. 만약 종방향 평가지표만 사용하면 종단경사를 포함하고 있는 구간에서 종방향 안전성이 비교적 낮게 도출될 것이다. 그러나 종방향 안전성만으로 해당 구간의 안전성을 평가하는 것은 단편적인 결과일 수 있으므로 다양한 평가지표를 활용한 종합적 검토가 필요하다. 혼합교통류 환경에서 안전성 취약 구간으로 도출된 구간은 우선 순위에 따라 개선 조치 및 예산 분배가 요구되므로 평가지표를 통합하는 것은 효율적인 정책 의사 결정의 측면에서도 장점이 있다. IRS는 도로 설계 요소별 상대적 안전성을 평가하기 위해 개발된 평가지표이다. 본 연구는 평가지표별 가중치와 step 2에서 산출된 SP를 곱한 통합 평가지표 IRS를 정의하였다. IRS의 계산 식은 Equation 3에 제시하였다. 는 평가지표 의 가중치, 는 정규화된 평가지표별 SP이다.
본 연구에서는 기존 방법론에 따라 통합 평가지표 도출을 위한 개별 평가지표와 가중치를 산출하였다. 실제 AV 사고 자료를 활용하는 것이 현실적으로 한계가 있으므로 전방 상황의 경고 정보를 받는 C-ITS 개별 차량의 주행행태 자료와 사고 자료를 활용하였다. Jo et al.(2022)는 C-ITS 환경에서 수집된 실주행 데이터와 고속도로 사고 건수를 기반으로 사고 개연성이 높은 안전성 평가지표의 우선순위를 도출하는 방법론을 제시하였다. C-ITS 실증 사업 구간 내 실제 사고 건수와 주행 데이터의 평가지표 값 간의 통계적으로 유의미한 상관관계가 성립되는 평가지표를 선정하였다. 다음으로, 평가지표 간 중요도에 따라 가중치를 부여하기 위해 머신러닝 기반 분류 모델인 랜덤 포레스트(random forest, RF)를 수행하였다. 본 연구에서는 분석 구간 내 교통사고 건수가 평균보다 많은 경우를 위험집단으로 라벨링하여 각 변수가 위험집단 분류에 미치는 영향력을 의미하는 MDG을 산출하였다. MDG 산출식은 Equation 4에 제시하였다. 는 평가지표 의 트리 노드 수, 는 k번째 자식노드에 대한 평가지표 의 지니 계수이다. 평가지표별 가중치는 개별 평가지표의 MDG 값이 모든 평가지표의 MDG 값의 총합에서 차지하는 비율인 Equation 5와 같이 계산된다. 는 평가지표 의 가중치, 는 평가지표 의 MDG 값이다.
주행-교통류 연계 시뮬레이션
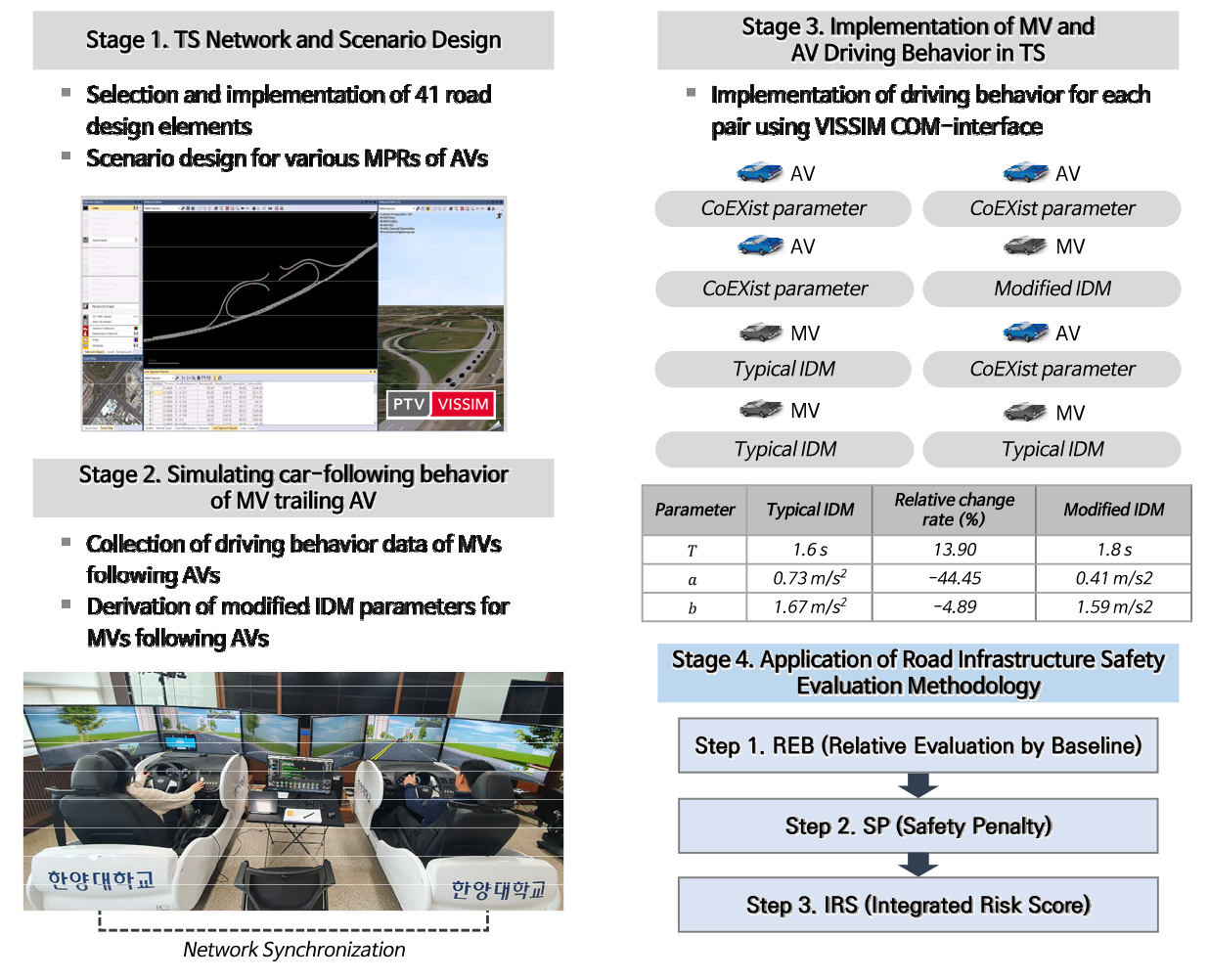
본 연구에서는 개발된 도로 인프라 안전성 평가 방법론을 적용하기 위한 시뮬레이션 실험을 설계하였다. 실도로 데이터를 활용한 분석이 가장 신뢰도 높은 결과를 도출할 수 있지만, 현실에서 AV의 MPR 증가에 따른 AV-MV의 상호작용 데이터를 확보하는 데는 한계가 존재한다. 본 연구는 MADS 실험을 통해 도출된 AV를 추종하는 MV의 주행행태 파라미터를 미시교통시뮬레이션인 VISSIM에 연계하여 보다 현실적인 차량 주행행태를 구현하였다. MADS 실험에서 도출된 AV를 추종하는 MV의 수정된 intelligent driver model(IDM) 파라미터를 VISSIM에 반영하여 현실과 유사한 MPR 변화에 따른 혼합교통류 환경을 재현하였다. 주행-교통류 연계 시뮬레이션은 4 stage로 구성된다. Stage 1은 네트워크와 시나리오를 설계하는 단계이다. 분석 네트워크는 고속도로 선형 및 시설물을 포함하며 고속도로 사고 잦은 구간을 포함하고 있다. Stage 2는 MADS 실험을 수행하여 AV를 추종하는 MV의 주행행태를 수집하는 단계이다. Stage 3은 수집된 MV 주행행태를 VISSIM COM-interface 기반으로 미시교통시뮬레이션에 반영하는 단계이다. MV를 추종하는 MV는 typical IDM parameter, AV를 추종하는 MV는 modified IDM parameter, AV는 CoEXist aggressive parameter를 적용하였다. Stage 4는 본 연구에서 개발된 도로 인프라 안전성 평가 방법론을 적용하여 AV의 MPR에 따른 위험도 점수 IRS를 산출하는 단계이다. 주행-교통류 연계 시뮬레이션 방법론 흐름도를 Figure 2에 제시하였다.
1. 미시교통시뮬레이션 네트워크 및 시나리오 설계
미시교통시뮬레이션 네트워크는 도로 설계 요소와 고속도로 사고자료 기준에 따라 설계하였다. 미시교통시뮬레이션의 네트워크는 고속도로 설계 요소와 사고자료에서 도로선형 조사 시 기록되는 요소 값에 따라 설계되었다. 고속도로 설계 요소는 평면선형(직선, 좌커브, 우커브), 종단선형(평지, 오르막, 내리막), 복합선형을 포함한다. 평면선형 설계 시 곡선반지름은 710m로 설정하였으며, 곡선부 길이는 500m와 1,000m를 적용하였다(Ministry of Land, Infrastructure and Transport, 2020; Jo et al., 2022). 또한 도로 시설물 중 연결로(직결형, 트럼펫형, 클로버형)와 가·감속차로 유형(평행식, 직접식)을 고려하였으며(Jung et al., 2023), 자율주행 전용차로를 최우측 또는 최좌측 한 개의 차로에 할당하여 시나리오를 구성하였다. 추가적으로 최근 3개년(2019년 6월-2022년 5월) 고속도로 사고자료를 이용하여 1km 단위 이정별 집계된 사고건수를 기반으로 상위 3개의 구간에 대한 네트워크를 구축하였다. 사고 건수가 가장 많이 집계된 구간은 중부선 이정 361, 서해안 이정 327, 제1순환선 이정 26이다. 네트워크 구축 시 직전 주행 구간의 주행행태 변화가 다음 주행 구간에 영향을 미치는 것을 방지하기 위해 완충지대 역할을 위한 직선의 평지 구간과 완화곡선을 추가하였다. 직선의 평지 구간 길이는 최소 정지시거인 250m, 완화곡선의 길이는 140m를 적용하였다(Ministry of Land, Infrastructure and Transport, 2020). VISSIM 시뮬레이션 분석 대상 네트워크를 Table 1에 제시하였다.
Table 1.
Traffic Simulation Network
2. AV를 추종하는 MV 주행행태 모델링을 위한 MADS 실험
본 연구에서는 현실과 유사한 차량 주행행태를 미시교통시뮬레이션에서 구현하기 위해 MADS 실험으로 AV를 추종하는 MV의 IDM 파리미터를 도출하였다. 주행 실험은 성인 남녀 30명을 대상으로 2022년 2월 14일부터 2022년 7월 29일에 수행되었다. 한양대학교 에리카캠퍼스 HY-STARS(Hanyang Smart Transportation Analysis and Research with Simulations) 실험실의 MADS 장비로 실험을 수행하였다. 실험 시나리오는 선행 차량의 종류에 따라 AV-MV pair와 MV-MV pair로 구분되며, 피실험자는 약 1시간 동안 다양한 도로 구간을 주행하도록 설계되었다. AV는 도로주행 시뮬레이션 프로그램인 SCANeR STUDIO의 script editor 모듈에 입력된 AV 알고리즘에 따라 운전자의 물리적 개입 없이 스스로 주행한다. MV는 주행 시뮬레이션에 탑승한 피실험자가 스스로 티어링 휠, 기어 변속, 브레이크, 가속 페달 등을 조작한다. 피실험자는 1년 이상 운전 경력과 다양한 연령대가 포함되도록 모집하였다(Jung et al., 2023). 주행 실험 시 피실험자가 평소 운전 습관대로 선행 차량을 추종하도록 요구하였다. MADS 실험을 통해 AV를 추종하는 MV와 MV를 추종하는 MV의 주행행태 데이터를 수집하였다.
IDM은 선·후행 차량 주행행태를 이용한 후행 차량의 종방향 제어를 위한 미시적 차량 추종 모델이다(Treiber et al., 2000). IDM은 후행 차량의 최대 가속도(maximum acceleration, )와 희망 감속도(desired deceleration, )에 기반하여 선행 차량과의 안전 차두시간(safe time headway, )을 유지하면서 희망 속도(desired speed, )에 도달하기 위한 함수로 정의된다. Treiber et al.(2000)은 안전 차두거리를 1.6 s, 차량 제로백을 기준으로 최대 가속도를 0.73m/s2, 희망 감속도를 1.67m/s2으로 제시하였다. IDM은 기존의 차량추종 모형인 Gazis-Herman-Rothery model, Gipps model, Full velocity difference model, Wiedemann model 보다 종방향 주행행태를 모사하는 데 가장 효과적인 것으로 보고되었다(Zhu et al., 2018). IDM 도출 식을 Equation 6에 제시하였다. 본 연구에서는 MADS 실험을 통해 AV-MV pair 및 MV-MV pair에 대한 차량 추종 상황에서 얻은 개별 후행 MV의 평균 차두시간, 최대 가속도, 희망 감속도의 상대 변화량을 계산하였다. 기존에 제시된 IDM typical value에 상대 변화량을 곱하여 수정된 IDM 파라미터 값을 산출한다(Jo and Oh, 2023a).
여기서, : 실제 속도(m/s) : 설계 속도(m/s) : 선행 차량과의 상대속도(m/s)
: 설계 동적 거리(m) : 최소 차간거리(m) : 안전 차두시간(s)
: 최대 가속도(m/s2) : 희망 감속도(m/s2)
3. 미시교통시뮬레이션에서의 MV 및 AV 주행행태 구현
미시교통시뮬레이션에서 MV의 거동은 VISSIM COM-interface를 기반으로 매 time step인 0.1초마다 IDM 파라미터 값이 적용되었다. 차량 추종 pair별 IDM 파라미터를 조정하는 것은 현실성 있는 혼합교통류 환경에서의 MV 거동을 재현한다. 추종 상황은 선행 차량과 후행 차량 간의 이격거리가 120m 이하이면서 주행 속도가 20 km/h에서 110 km/h 범위 내에 있는 상황으로 정의하였다(Higgs et al., 2011). 선행 차량이 MV일 경우 후행 MV의 파라미터 값을 기존 문헌에 제시된 typical value를 적용하였다. 선행 차량이 AV일 경우에는 후행 MV의 파라미터 값을 MADS 실험으로 도출된 modified value로 적용하였다.
미시교통시뮬레이션에서 AV 거동은 CoEXist 프로젝트에서 제시한 Wiedemann 99 AV 파라미터를 적용하였다(Sukennik, 2020). CoEXist 프로젝트는 유럽에서 2017년 5월-2020년 4월까지 약 3년간 테스트 트랙에서 수집된 AV 현장 데이터를 기반으로 주행행태 파라미터를 제시하였다. CoEXist는 rail safe, cautious, normal, aggressive 4가지 AV 거동 행태의 주행 로직을 구상하였다. Rail safe는 항구나 공장 내와 같이 폐쇄된 환경에서 적용되는 특수한 주행 로직이다. Cautious는 도로 규칙을 준수하는 주행행태를 보인다. Normal 또는 aggressive에 비해 차량 간 간격을 넓게 유지하는 특징이 있다. Normal은 사람 운전자와 유사하게 주행한다. 주변차량 거리 및 속도를 측정가능한 센서 범위를 활용해 주변 환경을 감지하는 것을 전제로 한다. Aggressive는 다른 주행 로직에 비해 가장 우수한 주변 환경 인식 및 예측이 가능한 AV를 모델링한 로직이다. 이 로직은 차량 간 간격을 최소로 유지하며 주행하도록 설계되었다. VISSIM 2020 이상 버전에서 AV의 거동 파라미터 기본 값으로 CoEXist cautious, normal, aggressive 파라미터를 제공한다. 본 연구에서는 level 4 수준의 AV 거동 파라미터로 aggressive를 사용하였다. 교통량은 설계 서비스 수준 C인 1,300pc/시/차로로 입력하였다. 시뮬레이션 시간은 warm-up time 400초와 본 분석 시간 1,800초 동안 수행되었다. 수집된 시뮬레이션 데이터를 본 연구에서 개발된 도로 인프라 안전성 평가 방법론에 적용하였다.
분석 결과
본 연구에서는 개발된 방법론을 적용한 시뮬레이션 기반 도로 인프라 안전성 취약 구간 분석을 수행하였다. 분석 결과는 평가지표와 가중치, MADS 실험으로 수집된 AV를 추종하는 MV와 MV를 추종하는 MV의 주행행태 분석 결과, 수정된 IDM 파라미터 값, 그리고 미시교통시뮬레이션 데이터로 산출된 IRS 값을 제시하였다.
1. 주행안전성 평가지표 선정 및 가중치 산출 결과
선정된 주행안전성 평가지표는 time-varying volatility(VF) 기반 spacing, headway, speed, acceleration (VF_spc, VF_hdwy, VF_spd, VF_acc)이다. 개별차량의 주행행태 변화 정도를 반영하는 time-varying stochastic volatility(VF)는 시간의 흐름에 따른 평가지표의 불규칙한 변화 행태를 정량적으로 산정하는 데 활용되었다(Kamrani et al., 2018; Mahdinia et al., 2021). VF 기반의 개별 평가지표를 통합하기 위해 랜덤포레스트 MDG 값을 기반으로 평가지표별 중요도를 반영하였다. 각 평가지표의 가중치는 0.34, 0.28, 0.21, 0.17로 산정되었다. 가장 높은 가중치를 가진 평가지표는 VF_spc로 spacing의 시간 변동량이 주행안전성에 중요한 요소임을 시사한다. 두 번째로 높은 가중치를 가진 평가지표는 VF_hdwy로 운전자가 선행 차량에 반응할 수 있는 시간적 간격의 변동성이 주행안전성에 주요한 요인임을 의미한다. 다음으로 VF_spd와 VF_acc는 속도와 가속도의 시간 변동량이 안전성에 영향을 미치는 것으로 해석할 수 있다. 주행안전성 평가지표 우선순위 및 가중치 산출 결과를 Table 2에 제시하였다. 본 연구에서 선정된 평가지표와 평가지표별 가중치를 대입한 IRS 산출식은 Equation 7과 같다. 는 SP, MPR은 자율주행 혼입률(0%, 10%, …, 100%), RDE는 1-41까지의 도로 설계 요소이다.
Table 2.
Driving safety evaluation index and weight
2. MADS 기반 차량 pair 별 주행행태 분석 결과
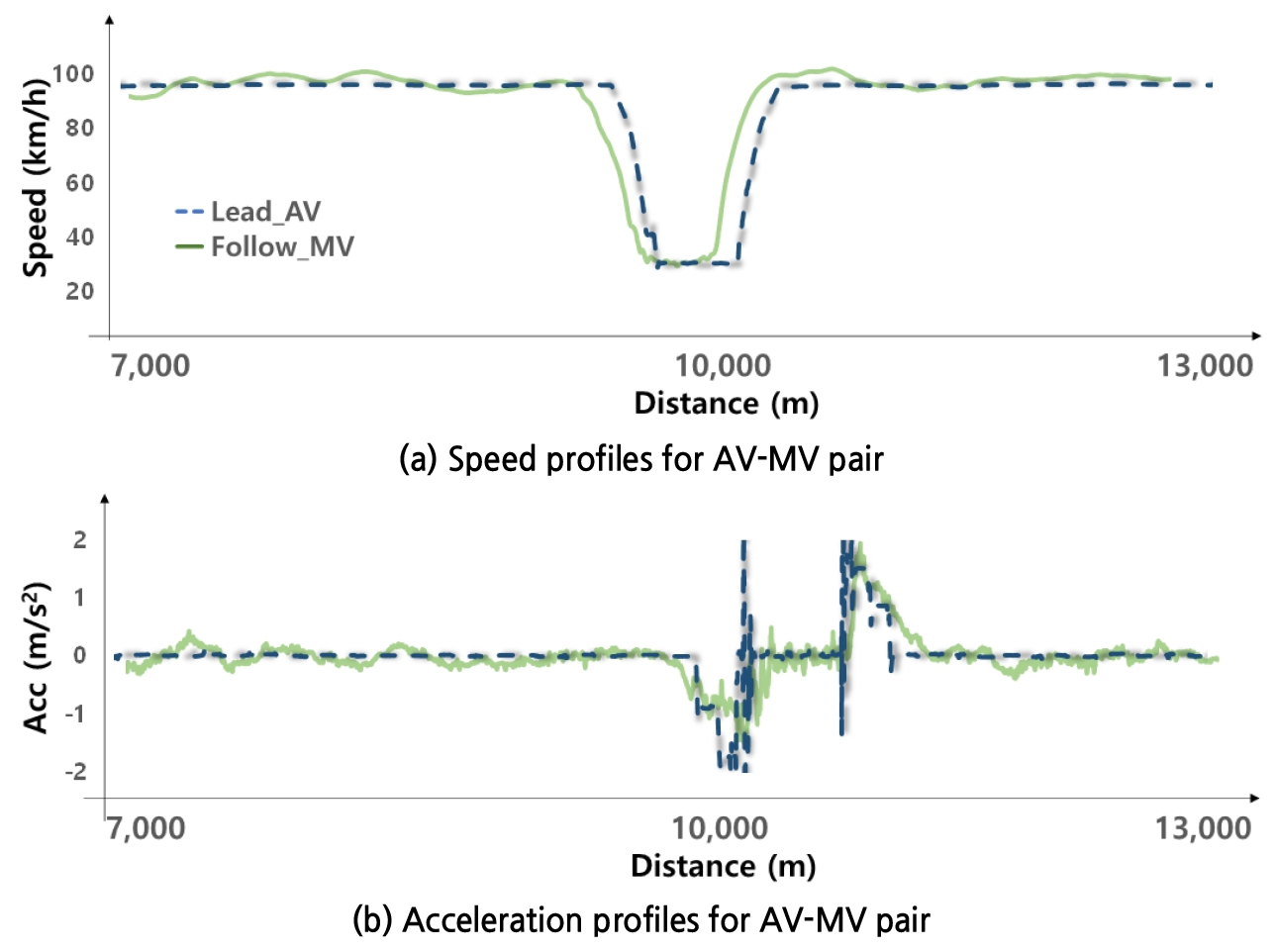
전통적인 차량 추종 형태의 속도, 가속도, headway의 평균, 표준편차, 최대·최소값과 85번째 백분위 수를 대상으로 혼합교통류 환경에서 차량 추종 행태를 비교하였다. MADS 주행 데이터를 30명의 피실험자의 지점 x에 대한 평균을 산출하여 대표 프로파일을 도출하였다. AV는 MV와 달리 제한속도인 100 km/h를 초과하지 않았다는 점에서 교통법규를 엄격히 준수하였다. AV는 평균 약 93.94 km/h 속도를 일정하게 유지하는 주행 패턴을 보였다. AV 속도 표준편차는 10.76 km/h로 추종하는 MV에 비해 약 7% 더 작았다. AV는 속도 프로파일에서도 일정한 속도를 유지하는 주행행태가 관찰되었다. AV의 감속도 표준편차는 0.21m/s2으로 MV에 비해 상대적으로 변동성이 작았다. 가·감속 프로파일에서도 AV의 가·감속 패턴이 MV에 비해 일관적이고 서서히 감속하는 특징이 관찰되었다. AV를 추종하는 MV의 평균 속도는 94.29 lm/h로 MV를 추종하는 MV의 평균 속도 98.71 km/h보다 약 4% 더 낮고 표준편차는 1.33 km/h(약 10%) 더 작았다. AV 추종 상황에서 MV의 평균 가속도는 0.11m/s2로 MV 추종 시보다 0.01m/s2(약 8%) 더 낮았다. 평균 headway 또한 AV 추종 시 평균 0.01s 더 짧으면서 동시에 표준편차는 0.02s(약 2%) 더 작았다. MADS 분석 결과는 AV가 전통적인 MV에 비해 제한 속도를 엄격히 준수하고, 속도와 가속도의 변동성이 적어 일관적이고 예측 가능한 주행 패턴을 유지함으로써 추종하는 MV의 주행행태가 변화하는 것을 시시한다. 주행 pair별 대표 프로파일 주행행태 특성을 Table 3에 제시하였고, AV-MV pair의 주행거리 7,000-13,000m 구간의 속도 및 가속도 주행 프로파일 예시를 Figure 3에 제시하였다.
Table 3.
Basic statistics on driving behavior by driving pairs
3. AV를 추종하는 MV 주행행태 모델링 결과
기존 문헌에 제시된 IDM typical value에 MADS 실험을 통해 도출된 상대 변화량을 곱한 수정된 IDM 파라미터 값을 도출하였다. 수정된 IDM 파라미터는 안전 차두시간 1.8초, 최대 가속도 0.41m/s2, 희망 감속도 1.59m/s2이다. 수정된 IDM 파라미터는 AV를 추종하는 MV의 주행행태 변화를 명확히 보여준다. AV를 추종하는 MV는 기존의 MV-MV 상호작용과 비교하여 안전 차두시간이 1.6초에서 1.8초로 증가하고, 최대 가속도는 0.73m/s2에서 0.41m/s2로 감소하며, 희망 감속도는 1.67m/s2에서 1.59m/s2로 소폭 감소하였다. 이러한 변화는 MV 운전자가 AV의 주행 특성에 맞추어 더 큰 안전 거리를 유지하고 선행 차량의 일관성 있는 주행행태로 인해 가속 및 감속이 감소한다고 해석할 수 있다. AV의 예측 가능한 주행 패턴이 MV 운전자의 주행행태에 영향을 미친 결과로 혼합교통류 환경에서의 MV의 주행행태 변화를 고려한 교통 관리 전략이 필요함을 시사한다. IDM 파라미터 값은 VISSIM COM-Interface 기능을 사용해 AV를 추종하는 MV 차량의 실시간 종방향 제어에 적용하였다. MV-MV pair에는 Typical value 값을 AV-MV pair에는 modified value를 적용하였다. IDM 파라미터 값을 Table 4에 제시하였다.
Table 4.
IDM parameter
4. 도로 안전성 취약구간 안전성 평가 결과
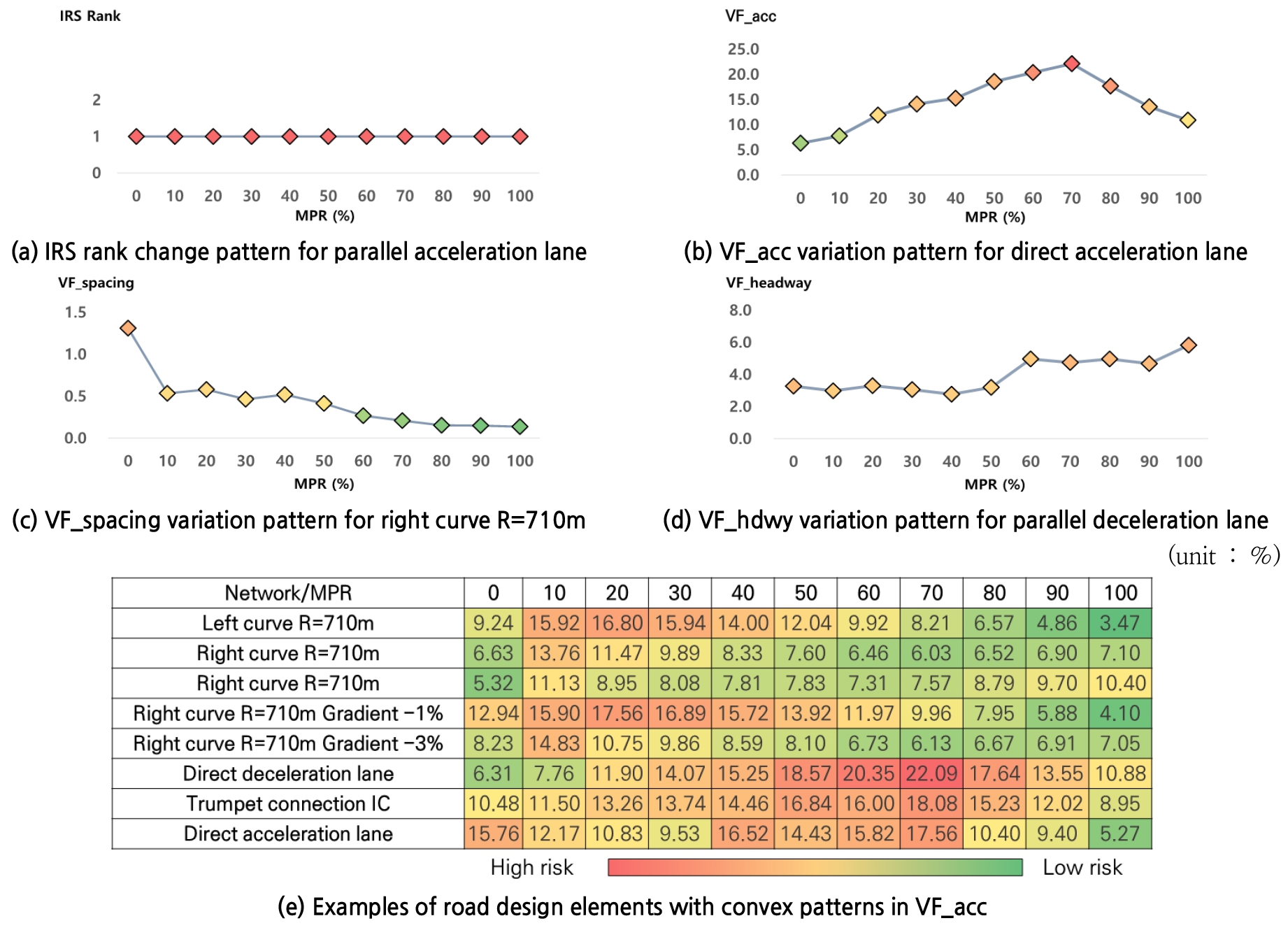
도로 설계 요소별 SP와 IRS를 산출한 결과 MPR 0-100% 모두 평행식 가속차로가 가장 취약한 것으로 분석되었다. 평행식 가속차로의 IRS 점수는 0.93-1.00 값으로 도출되었다. 평행식 가속차로에서는 VF_spacing과 VF_headway 값이 다른 설계 요소에 비해 가장 높았다. 본선 주행 차량과 합류하는 차량 간의 상호작용이 발생할 때 운전자에 따라 가속 지점과 패턴이 다양하게 나타나면서 AV의 합류 난이도를 높이고 차량 간 spacing과 headway 변동성이 증가하기 때문으로 해석된다. AV의 MPR에 따라 변동성이 있지만, 트럼펫형 IC와 평행식 감속차로, 직접식 감속차로, 중부선 동서울 톨게이트가 상대적 안전성이 낮은 구간으로 도출되었다. 도로선형 중에서는 우커브 R=710m 내리막 1%, 오르막 1% 구간, 평면곡선 반지름 6,900m 구간이 상대적으로 취약했다.
추가로 AV의 MPR이 증가할 때 도로 인프라 안전성 변화가 변동 미미, 볼록형, 우하향, 우상향 4가지 패턴으로 관측되었다. 개별 평가지표 및 IRS 순위에서 4가지 패턴이 관찰되었다. IRS를 점수가 아닌 순위로 평가하는 이유는 MPR이 변함에 따라 baseline이 되는 평지의 직선구간의 평가지표 값이 변화하므로, 다른 MPR 상황에서 산출된 IRS 점수를 비교할 수 없기 때문이다. IRS 순위의 변동성 미미 패턴이 관측되는 도로 인프라는 AV 도입 및 MPR 증가에 따른 혼합교통류 주행안전성에 변화가 없거나 적은 구간이다. IRS 순위를 기준으로 가·감속차로, 톨게이트, IC 구간에서 변동 미미 패턴이 뚜렷하게 관찰되었다. 볼록형 패턴을 보이는 구간은 AV와 MV의 혼합 정도가 높아짐에 따라 초기에는 안전성이 저하되다가 특정 MPR 이상이 되면 안전성이 향상되는 구간이다. VF_acc를 기준으로 직접식 가속차로와 감속차로, 트럼펫형 IC, 우커브, 좌커브 구간 관찰되었다. 우하향 패턴이 관찰되는 구간은 AV 도입 및 MPR 증가에 따른 안전성 증대 효과가 가장 클 것으로 기대되는 구간이다. VF_spacing을 기준으로 우커브, 좌커브, 평면 및 종단 복합선형 구간에서 관찰되었다. 반대로 우상향 패턴이 관찰되는 구간은 AV 도입 및 MPR 증가에 따른 상대적 안전성이 저하될 우려가 있는 구간으로 VF_headway를 기준으로 평행식 감속차로 구간에서 관찰되었다. 안전성 변화 패턴이 뚜렷하게 관찰되는 구간 예시를 Figures 4(a)-(d)에 제시하였다. VF_acc 평가지표 값이 MPR 증가할 때 볼록형 패턴으로 관측되는 도로 설계 요소를 Figure 4(e)와 같이 제시하였다.
결론 및 향후 연구 과제
자율-비자율 혼합교통류 환경은 장기간 지속될 것으로 전망되며 AV의 새로운 주행행태의 등장과 AV를 추종하는 MV의 거동 변화에 따라 교통류도 변화할 것으로 예상된다. 혼합교통류 환경에서 안전한 자율주행이 가능한 도로 구간을 평가하는 것과 안전성 취약 구간에 대한 선제적 대응 방안을 개발하는 것이 요구된다. 기존 도로는 운전자 중심으로 설계되었고 AV의 MPR에 따른 자율-비자율 혼합교통류 환경에서 개발된 도로 인프라 안전성 평가 방법론이 미흡하였다. 본 연구는 혼합교통류 환경에서 MPR 변화에 따른 연속류 도로 인프라의 주행안전성 통합 평가 방법론을 제시하였다.
도로 인프라 안전성은 3단계로 구분된다. 첫째, 운전자의 주행행태가 가장 안정적인 평지의 직선 구간을 기준으로 평가지표 값의 상대적 변화량인 REB를 산출한다. 둘째, 각 평가지표마다 REB의 범위가 달라 비교가 어려운 한계를 극복하기 위해 REB를 정규화한 안전성 취약 점수인 SP를 도출한다. 셋째, 본 연구는 평가지표별 안전성 취약 구간이 다르게 도출되어 우선순위를 도출하기 어려운 한계를 극복하기 위해 통합 평가지표 IRS를 고안하였다. 본 연구는 선행 연구에서 제시된 사고개연성이 높은 한국 고속도로 위험 구간을 중요도 높게 식별할 수 있는 주행안전성 평가지표 선정 방법론에 따라 4가지 지표를 선정한 후 중요도에 따라 가중치를 부여하였다. 선정된 평가지표는 VF_spc, VF_hdwy, VF_spd, VF_acc이며 각 평가지표별 가중치는 0.34, 0.28, 0.21, 0.17로 spacing의 시간 변동량이 주행안전성에 가장 중요한 요소로 도출되었다.
개발된 연구 방법론을 적용하기 위해 주행-교통류 연계 시뮬레이션을 설계하였다. 연속류의 다양한 기하구조 및 시설물을 포함하는 41개의 도로 설계 요소를 선정한 다음 안전성 취약 구간을 선정하였다. 주행 시뮬레이션 단계에서 AV를 추종하는 MV의 주행행태는 전통적 주행행태와 다를 것이라는 가정을 충족하기 위해 MADS 실험을 수행하였다. 실험 결과 AV의 높은 법규 준수 및 일정한 주행 패턴 영향으로 MV를 추종할 때보다 AV를 추종할 때 상대적으로 안정적인 주행행태를 보였다. 실험 데이터를 기반으로 AV을 추종하는 MV의 차두시간은 약 14% 증가하였으며, 최대 가속도와 희망 감속도 각각 약 44%, 5% 감소하도록 VISSIM-COM interface에서 IDM 모델 파라미터를 조정하였다. 혼합교통류 환경에서 AV의 MPR 증가를 반영한 도로 인프라의 안전성 취약 구간 분석을 수행하였다. AV의 MPR이 0-100%일 때 모두 평행식 가속차로의 IRS가 가장 높아 안전성 취약 구간으로 식별되었다. AV의 MPR이 증가에 따른 주행안전성 변화 패턴을 관측하였는데 변동 미미, 볼록형, 우하향, 우상향 4가지로 관찰되었다. 다양한 패턴이 도출된 것은 AV 도입에 따른 안전성 개선 효과가 도로 인프라별로 다르게 나타남을 시사한다.
본 연구는 자율주행 모빌리티의 실현을 위한 도로 인프라 안전성 평가의 방향성을 제시하였다는 점에서 의의가 있으나 다음과 같은 한계점과 향후 연구 과제가 남아있다. 첫째, 본 연구에서는 2대의 선후행 차량 추종 상황에 한정하였으나 향후 선두의 자율주행 차량의 주행 변화가 추종하는 차량 대열에 미치는 string stability 변화를 고려하여 안전성에 대한 논의를 교통 시스템 전반으로 확대해야 한다. 둘째, 실도로 구간에서의 주행 데이터를 수집할 수 있는 현장 실험 환경을 구축하여 자율주행 차량의 MPR에 따른 AV와 MV의 차량 추종 데이터를 기반으로 도로 인프라의 안전성 평가가 필요하다. 셋째, 본 연구에서 도출된 결과는 상대적 안전성을 측정한 것으로 기존 도로 평가 기준 및 신설 도로의 설계 기준 마련을 위해서는 임계값에 따른 절대적 안전성 평가 연구가 필요하다. 넷째, 본 연구에서 관찰된 AV의 MPR 증가에 따른 주행안전성 변화 패턴별 단계적 시설 개량 등 맞춤 조치를 연구할 필요성이 있다. 마지막으로 차량 간 상호작용 안전성을 정량적으로 분석할 수 있는 다양한 지표(Time-to-Coillision 등)들을 추가적으로 고려하여 분석결과의 신뢰성을 고도화할 수 있다.
본 연구에서 개발한 방법론과 도출된 결과는 다음과 같은 활용방안을 제시한다. 도로 설계 및 개선에 있어서, 본 연구에서 식별된 안전성 취약 구간은 도로 설계 및 개선에 중요한 정보를 제공한다. 특히, 본 연구 결과를 바탕으로 평행식 가속차로를 포함한 혼합교통류 취약 구간에 대한 AV와 MV의 상호작용을 고려한 교통 관리 전략을 개발하여 교통 흐름의 안전성을 높일 수 있다. 통합 평가가 가능한 IRS 방법론을 활용하면 도로 인프라의 상대적 안전성을 평가하고 예산 분배 및 개선 조치를 효율적으로 결정하는 데 도움이 된다. 본 연구는 AV 도입에 따른 도로 환경 변화에 있어 필수적인 인프라 안전성 평가 및 개선 방안을 모색하는 데 활용될 수 있다. 더불어 자율주행 차량 도입의 확대와 함께 도로 인프라의 안전성을 평가하는 것뿐만 아니라 주행안정성 증진에 기여할 것으로 기대된다.
