

연구 배경
문헌 고찰
연구 대상
1. 교통안전시설
2. IoT 교통안전시설 무선 통신
데이터 셋 구성 설계
1. 설계 기본 요소 진단
2. 부가정보 설계
데이터 셋 구성의 조합
1. D2V 통신 메시지 데이터 셋 타입 1
2. D2V 통신 메시지 데이터 셋 타입 2
3. D2V 통신 메시지 데이터 셋 타입 3
4. D2V 통신 메시지 데이터 셋 타입 4
5. D2V 통신 메시지 데이터 셋 타입 5
결론
연구 배경
자율주행기술 개발을 위한 많은 연구가 활발히 진행되고 있다. 일반 차량 운전자들이 ‘첨단 운전자 보조 시스템(advanced driver assistance systems)’ 서비스 경험을 통해 미래 자율주행 기술에 대한 기대가 높아지고 있으며, 새로운 첨단 기술들의 소개로 디지털 도로 인프라와 완전 자율주행에 대한 목표 시기가 당겨지고 있다. 완전한 자율주행을 위해서는 교통안전이 확보되어야 한다. 이를 위해선 자율주행차가 먼저 (1) 주변 인접 차량과의 사고 위험을 피할 수 있어야 하고, (2) 주변 차량이 없어도 스스로 도로교통 관련 법규를 준수할 수 있어야 한다. 이를 위해 많은 연구자 및 관련 기관이 노력하나, 자율주행과 관련된 교통안전 사고는 지속해서 발생하고 있다(California Government, 2021).
주변 인접 차량과 상충은 자율주행차량에 장착된 다양한 라이더, 레이더, 영상검지기 등과 같은 센서로 인지할 수 있다. 자율차량 관련 전기, 전자, 통신과 같은 정보기술(information technology) 분야에서 상충 상황을 인지하고 이에 차량이 대응하는 방법을 연구하고 있다. 그러나 이러한 센서를 이용한 방법으로 자율주행차가 스스로 도로교통 법규를 준수하기엔 한계가 있다. 자율주행차는 우리나라뿐만 아니라, 독일, 영국, 일본, 미국 등 여러 국가에서 생산될 것이며, 다양한 국가로 수출된다. 이를 수입하는 국가들의 도로교통 법규 내용이 국가별1)로 다르다. 자율주행차가 주행 도로 현장에서 도로교통 법규를 바르게 확인하고 대응하지 못하면 안전 상황이 확보되기 어렵다. 법규 준수는 공공의 영역이다. 이 때문에 국가 공공기관이 올바른 법 진행을 위한 자율주행 인프라 환경 개발에 관심을 가진다.
국가 도로교통 관련 법규 중 도로교통법이 정하는 교통안전시설은 중요성은 높다. 해당 시설을 자율주행차가 인식하고 이해할 수 있게 하기 위해 전기, 전자, 통신 분야 전문가들은 차량 센서를 이용하여 ‘딥 러닝’ 등의 방법으로 이들 시설을 인식하려 한다(Chawin et al., 2018). 이는 시설을 고유 객체로 인식하는 방법으로 개별 시설의 인식에 해당한다. 주 표지와 보조표지로 구성되는 복합 시설이 전달하는 내용을 영상 이미지 해석 기술로 바르게 파악하기 쉽지 않다. 또한 이러한 영상 이미지도 우천, 안개, 강설 및 가로수 가림 등 다양한 외부 요인으로 상시 확보하기 어렵다. 이러한 상황은 반복적으로 발생하며. 교통안전의 사각지대이다.
현장 도로교통 관련 시설과 운영은 복합적으로 마련된다. 시차제 좌회전 및 시차제 버스전용차로 운영과 같은 ‘시차제’로 운영되고 있고, 특정 차량 중량, 높이, 요일, 시간, 차로와 같은 조건에 따라 규제가 허용되거나 금지되는 ‘조건부’로 운영되기도 한다. 자율주행차량이 현장에서 이를 이해하고 대응할 수 있어야 한다. 자율주행 기술이 다루는 교통안전시설 정보는 개별 해석이 아닌 복합적인 방식으로 해석되어야 한다. 이를 위해서 복합적인 정보(시간, 조건, 차로, 구간, 규제 등)가 자율주행차로 전달될 수 있어야 한다(Kim, 2018).
자율주행차량의 안전 주행을 지원하는 도로 인프라 구축에 ‘사물인터넷(internet of things, IoT)’ 및 ‘동적지역지도(local dynamic map, LDM)’ 기술이 언급된다. 이들 중 LDM은 기술집약적이고 방대하여 많은 초기 및 운영비용이 소요된다. 시스템 개발 및 관리 주체가 분명하지 않아 LDM을 마련 및 정보를 제공하는 공공기관이 개념상 존재하나 현실적이지 않다. IoT 기술은 상대적으로 비용이 저렴하여 현실화 기회가 존재한다. IoT 기술로 교통안전시설 정보 제공 ‘IoT 장치’가 개발되고 있다(National Police Agency, 2020). 해당 장치를 통해 ‘자율주행차’로 복합 교통안전시설 정보를 전달한다. 이러한 ‘장치’에서 ‘차량’으로 전송되는 통신은 device-to-vehicle(D2V)로 명칭된다.
복합적인 교통안전시설 정보를 다양한 유형의 메시지 셋에 담아 자율주행차로 전달하는 기술이 필요하다. 복합적 교통안전시설 정보를 효율적으로 자율주행차로 전달하는 내용 및 방법은 교통공학 관점에서 중요하다. 자율주행차 개발자들에게 내용이 충분히 전달 가능하여야 하고, 자율주행 도로 인프라를 마련하고 관리하는 도로관리청 행정 전문가들이 유지관리에 활용할 수 있어야 한다. 궁극적으로 자율주행차량이 바르게 규제정보를 수신하고, 또한 자율주행차량의 시설 인식 오류 상황이 없도록 하여 안전한 도로 주행을 가능하게 할 것을 기대한다(Yoon et al., 2017).
본 연구는 D2V통신을 통해 자율주행차로 전달되는 복합 교통안전시설 메시지 ‘데이터 셋’ 개발을 목표로 한다. 본 연구는 자율주행차가 필요로 하는 시설 중 도로교통법 시행규칙 별표 6이 정하는 교통안전표지와 노면표시를 대상으로 한다. 연구범위에서 별도 방식이 개발되고 있는 ‘교통신호’ 및 자율주행차가 필요로 하지 않는 ‘안전표지 및 노면표시’는 연구범위에서 제외한다. 또한 ‘IoT 기술’과 관련하여 현실적으로 실용화 가능성이 낮은 높은 비용의 ‘통신 및 전력’기술 활용을 가정하지 않는다. 별도 통신 및 전력 사용료가 없는 통신기술을 활용하는 IoT시설을 기반으로 D2V 통신 메시지 ‘데이터 셋’ 내용을 개발한다.
1) 노면표시 중 ‘지그재그’ 표시는 우리나라 도로교통법에서 ‘서행’의 의미로 정의되나, UN Convention on Road Signs and Signals에서는 ‘주차금지’ 의미로 정의된다(United Nations, 2006; Ministry of Government Legislation, 2021).
문헌 고찰
자율주행 인프라가 자율주행차로 디지털 형태의 교통안전시설 정보를 능동적으로 제공하는 연구가 많지 않다. 대부분의 기존 연구들은 차량이 수동적으로 교통안전시설 인지 및 해석 기술이 차량이 영상 이미지를 수집 및 분석하는 방식으로 진행되었다. 현장 교통안전시설은 보행자, 차량, 이륜차 운전자 모두를 대상으로 마련되었기 때문에 이들로부터 차량 대상 시설과 그렇지 않은 시설을 구분할 필요가 있다. 이와 더불어 자율주행차를 대상으로 하는 시설 중에서도 규제 중요도가 높은 시설과 낮은 시설을 구분할 필요가 있다.
다양한 교통안전시설물 중 자율주행차량에게 필요한 교통안전시설을 구별하기 위하여 Park and Yun(2018)은 전문가들로부터 의견을 조사 분석하였다. 이들은 현재의 영상 이미지 분석 기술의 한계를 인식하고 주변 도로환경에서 ‘교통안전시설’을 구분하는 기술의 중요성을 먼저 지적하며, 교통안전시설 중 교통신호기, 노면표시, 교통안전표지, 도로의 차로 수(폭), 중앙분리대 순으로 중요도가 높음을 제안하였다. 이들은 교통안전시설 이미지가 손상되었을 경우 영상 이미지 분석의 어려움을 지적하였다.
교통안전시설의 영상 이미지 인식 성공률에 대하여 Kevin et al.(2018)은 다양한 촬영 각도와 촬영 거리를 반영하며 수집된 자료를 분석하였다. 이들은 딥 러닝 기법을 적용하여 인식 성공률을 비교하였으며, 교통안전표지 모양이 손상되어 정형화되어 있지 않은 경우 영상 이미지를 통한 교통안전표지 인식률이 떨어질 수 있음을 지적하며, 도로 인프라 환경에서 실시간 교통안전시설의 유지관리 중요성을 강조하였다.
교통안전시설 모양은 유지되어 있더라도 주변에 교통안전시설과 유사한 형태의 상업 광고 표지가 도로변에 위치한 경우 영상 이미지 인식 성공률을 Chawin et al.(2018)이 분석 하였다. 이들은 자율주행차량이 교통안전시설 뿐만 아니라 도로변에 설치된 형태가 유사한 민간 시설(주유소, 식당, 숙박업소, 아웃렛) 등을 홍보하는 광고 표지까지도 교통안전시설로 오판하여 교통안전을 위협할 수 있다고 지적하였다.
이처럼 교통안전시설을 인식하는 과정에 영상 이미지를 분석하는 방법의 한계를 극복하기 위해 별도의 디지털 교통안전시설 정보를 자율주행차에게 제공할 필요가 있다고 Richard et al.(2019)이 제안하였다. 이들은 자율주행차량에게 능동 방식으로 전달하는 교통안전시설 정보를 디지털 교통안전시설(digital traffic control device)로 정의하였다. 노변장치(road side unit)와 무선통신 기술을 활용하여 교통안전시설 자료를 자율주행차에게 배포하는 방식을 제시하였다. 모든 도로에 설치되는 교통안전시설을 디지털 방식으로 전환하기 위한 경제적 부담을 감소하기 위하여 이러한 교통안전시설 정보 등급을 세 가지 등급으로 구분하는 방법을 함께 제안하였다. 해당 등급을 결정하는 지표로 이들은 ‘유지보수 시급성’을 적용하였다.
교통안전시설 규제 정보를 디지털 형태로 전환하여 활용하는 연구는 지금까지 교통신호 부문으로 제한되었다. 대표적 교통안전시설인 교통신호 부문에서 센터와 현장 제어기간 통신 방식으로 미국의 ‘국가지능형교통체계통신방식(National Transportation Communications for Intelligent Transportation Systems)’이 사용되고 있다(National Electrical Manufacturers Association, 2004). Go et al.(2006)은 해당 통신방식의 우리나라 도입을 검토한 바 있으나 교통안전표지 및 노면표시 시설까지 확장검토하지는 않았다. 우리나라 상황에 맞도록 Kim et al.(2013)은 국내형 디지털 교통신호제어기용 별도의 통신 메시지 셋을 개발하였다.
자율주행환경 교통안전시설 중 교통신호 부문에서 무선통신 자료에 대한 연구는 활발하게 진행되었으나, 안전표지 및 노면표시 부문에서의 무선통신 정보 메시지 셋 연구는 이루어진바 없다. 자율주행 환경에서 이미지 프로세싱의 한계가 대두되며 해당 분야의 연구가 조명될 것으로 예견된다.
연구 대상
1. 교통안전시설
우리나라 교통안전시설은 도로교통법 시행규칙 별표 6에서 정의된다(National Police Agency, 2021). 도로교통법 제2조(정의)에서 교통안전시설의 종류로 교통신호기와 안전표지를 정의한다(Ministry of Government Legislation, 2021). 현행 도로교통법은 노면표시를 안전표지의 종류로 구분하여 정의하고 있다. 안전표지의 종류는 주의표지, 규제표지, 지시표지, 보조표지로 구분된다. 안전표지(주의표지, 규제표지, 지시표지, 보조표지)는 도로변에 설치되어 색상, 문양, 심벌의 형태로 도로 상 특정 지점 또는 구간에 대한 교통안전 정보를 운전자에게 전달한다. 노면표시는 노면에 설치되어 기호, 문자 또는 선의 형태로 특정 지점 또는 구간에 대한 교통안전정보를 운전자에게 전달한다. 이들 교통안전시설로 제공하는 정보로 해당 도로 지점 또는 구간에서 교통안전을 확보하게 한다. Table 1은 되며 이들을 구분하여 제시한다.
Table 1.
Traffic control device under the road traffic law










교통안전시설 중 자율주행상황에 필요한 교통안전시설 정보를 선별하여 IoT기술을 활용하여 자율주행차에게 제공할 필요가 있다. Table 2는 상기 4가지 기준으로 자율주행 교통안전시설 메시지 세트 연구대상에서 제외한 시설을 제시한다. 자율주행차에게 필요하지 않은 교통안전시설 정보를 누락하여 IoT 정보제공 메시지 세트 대상을 최소화 하였다. 필요하지 않은 시설로 누락한 기준은 총 네 가지이다.
첫째, 주의, 규제, 지시 등의 안전표지와 조화되지 않아 독립적으로 사용되는 보조표지의 경우 연구 대상에서 제외한다. 보조표지 원래 목적이 주의, 규제, 지시표지와 연계되어 보조 정보를 제공하는 것이 목적이다. 그렇지 않은 경우는 제외한다. 둘째, 자율주행차량에게 정보를 제공할 필요가 없는 다른 용도의 안전표지 및 노면표시를 제외한다. 예로 보행자 및 이륜차 운전자를 대상으로 하는 시설이다. 셋째, 노면표시 중 다양한 이미지 형태로 설치되어 그 형태가 일반화되기 어려운 노면표시를 제외한다. 이는 안전지대와 같이 교차로 형태별로 그 모양이 다양하여 디지털 정보로 일반화하기 어려운 경우이다. 넷째, 정보제공 구간이 길어 동일한 정보를 반복적으로 제공함으로 인해 경제성이 낮아지는 경우이다. 일반 차로변경 허용 구간 차로가 이러한 경우의 예이다. 제외된 시설은 Table 2와 같으며 이를 제외한 나머지 128종의 교통안전시설을 대상으로 연구가 수행되었다.
Table 2.
Excluded traffic control device
2. IoT 교통안전시설 무선 통신
IoT 교통안전시설의 통신방식은 다양할 수 있다. 현재 첨단 교통인프라와 관련하여 웨이브(wireless access in vehicular environments, WAVE), 5G(five generation), c-V2X(cellular vehicle to everything), IoT기반 로라(Long Range, LoRA) 통신기술이 사용되고 있다. 본 연구는 이들 통신방식 중 교통안전시설을 관리하는 도로관리청의 선호 방식을 가정하며 진행되었다. 이는 1990년대 우리나라 지방자치단체가 지능형교통체계(Intelligent Transport Systems, ITS) 사업 중 당장 초기비용이 저렴한 임대망 통신 인프라를 구축한 후, 향후 통신 유지보수 비용이 저렴한 자가망 시스템을 전면 교체한 과거의 이력을 근거로 한다. 통신 유지보수 비용이 상대적으로 저렴한 IoT기반 로라 자가망의 활용을 가정하며 연구를 수행하였다.
자율주행차량의 IoT장치로부터 정보를 제공받은 후 적절한 판단 후 제동(최악의 경우 충분히 정지)할 수 있도록 ‘최소통신거리’로 300m(300m 전방 상황 인지)로 설정하였다. 이는 일반적인 ‘안전 정지시거’를 초과하는 수준이다. 이 거리는 도시부 주행 시 자율주행차량이 동일한 교통안전 규제정보를 최소 2회 이상 수령할 수 있는 기회에 해당한다.
IoT 기반 LoRa 통신은 IoT장치에서 자율주행 차량에게 정보를 제공하는 과정에 전력을 소비하게 된다. 도로변의 지주에 부착(안전표지 설치를 위한 부착식) 되거나 도로 노면에 매설(안전표시 설치를 위한 매설식)되어 설치되기에 별도의 배터리 전력을 사용한다. 배터리 수명도 일반적인 교통안전시설 내구연한(교통신호등 5년, 교통신호제어기 10년)보다 충분히 긴 10년을 목표하는 IoT 장치가 준비되고 있어2), 해당 무선통신 상황을 고려하여 본 연구를 수행하였다.
IoT 장치의 정보제공 주기는 10초/회이고, 1회 정보제공에 사용되는 정보제공 데이터 용량은 32byte이다. 여기서 1byte는 16진수 2자리로 표현된다. 해당 자리 수에 총 256가지(0-255) 문자를 사용한 정보제공이 가능하다. 해당 공간에 교통공학 측면에서 효율적으로 공간을 정리 및 활용하여 자율주행차량의 교통안전을 확보할 수 있도록 많은 데이터를 전송하여야 한다. Figure 1은 기초 설계된 IoT 교통안전시설의 1회 무선통신 데이터 공간을 도시화하여 제시한다.
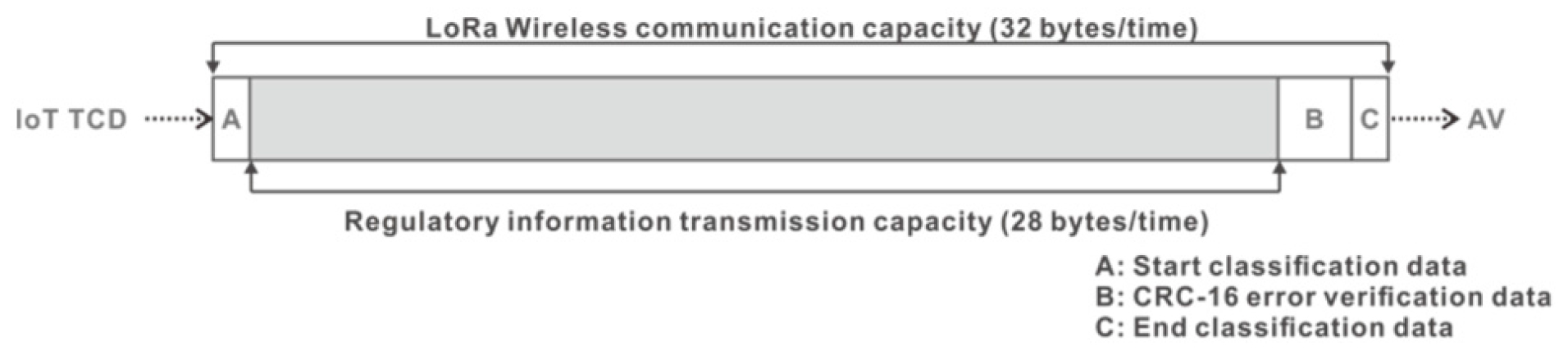
전체 데이터 패킷 용량 32bytes/회 중 시작 및 종료 구분자(2bytes/회), 오류 점검 공간(2bytes/회)을 제외하면 실제 교통안전시설 정보를 전달할 수 있는 공간은 28bytes/회로 한정된다. 본 연구에서 실제 규제정보 전송 용량인 28bytes/회 한계를 인식하며 IoT 교통안전시설 정보제공 D2V 통신 메시지 데이터 셋을 개발하였다. 개발 과정에 도로교통법에서 정의하고 있는 행정 내용뿐만 아니라, 실제 현장에 설치되어 운용되는 다양한 사용의 경우를 고려하였다.
2) Low power wide area network(LPWAN) 특성 고려한 LoRa 통신(최대 통신 거리 11km) 사용으로 전력소모 관리(Lee, 2019).
데이터 셋 구성 설계
1. 설계 기본 요소 진단
앞에 언급한 바와 같이 활용 가능한 데이터 28byte를 사용할 수 있는 단위 정보 종류를 크게 두 가지로 구분하였다. 이들은 ‘기본정보’와 ‘부가정보’이다. ‘기본정보’는 안전시설에 대한 정보를 포함하며, ‘부가정보’는 안전시설 정보에 추가하여 보조적인 설명이 필요한 경우 제공할 수 있는 정보이다. Table 3은 이들 ‘기본정보’와 ‘부가정보’를 구분하여 제시한다. 본 단락에서는 ‘기본정보’ 내용을 우선적으로 설명한다.
‘기본정보’는 (1) 교통안전표지가 설치된 도로 이름, (2) 교통안전표지가 적용되는 도로 코드, (3) 시설의 설치 지점, (4) 고유 교통안전시설 식별코드와 같은 일반 정보를 포함한다. 전국 도로를 대상으로 교통안전표지가 설치된 도로를 구분하기 위해 ‘행정안전부’가 정의한 ‘도로명 코드’를 변형 활용한다. ‘행정안전부’ 도로명 코드에는 주도로와 연결되는 연결로 및 접속로를 구분하는 정보가 부재하여 이를 구분하는 순차번호(1byte)를 추가 부여하여 구분이 가능하도록 하였다. 이를 통해 자율주행차량의 진행 방향(예; 상행, 하행)을 별도로 구분하게 하고, 설치 위치가 유사하나 적용 대상이 아닌 교통안전시설 정보를 거르게 한다. 입체 교차지점에서 다른 도로에 설치되어 통신 연결되는 다른 교통안전시설물을 걸러내게 한다.
자율주행차량에게 교통안전을 조심하여야 하는 지점 정보를 상세하게 제공하기 위해 정밀 위성항법시스템(global positioning systems, GPS) 위치정보(8bytes)를 통해 제공한다. 해당 좌표는 X, Y 값을 포함하며, 이를 통해 문형식 또는 측주식 설치된 교통안전시설을 구분하게 한다. 이들 정보는 자율주행차량 뿐만 아니라 이들 시설의 기능을 유지 및 관리하여야 하는 도로관리청이 필요로 하는 정보이다.
‘기본정보’의 마지막으로 교통안전시설의 고유 식별코드가 포함된다. 이는 경찰이 규정하는 도로교통법 시행규칙 별표 6을 통해 규정하고 있는 식별코드로 일반 교통안전시설 코드와 동일하다. 해당 고유 식별코드는 총 2개 자리(2bytes)를 활용하여 구분할 수 있다.
Table 3.
Unit traffic control device basic information composition
2. 부가정보 설계
실제 도로현장에서는 ‘기본정보’에 추가하여 ‘부가정보’ 제공이 필요하다. ‘특정 시간 대 회전금지’와 같은 경우 ‘해당 시간대’에 대한 보조 정보가 필요하며, ‘특정 구간에 규제 적용’의 경우 ‘해당 구간’에 대한 정보가 추가로 필요하다. 이들 부가정보는 도로 환경에 따라 정보가 상이한 교통안전시설 정보를 보충하는 역할을 수행한다. 이는 기존 ‘보조표지’의 역할과 유사하다. ‘부가정보’를 세부적으로 설계함에 앞서 각 교통안전시설에게 필요한 ‘부가정보’의 종류를 진단하였다. Table 4는 진단 결과를 제시한다.
Table 4.
Required information for traffic control device
개별 교통안전시설에게 필요한 ‘부가정보’ 활용상황을 진단한 결과 아래의 네 가지 경우로 구분되었다.
• (Case 1) 위치정보(지점정보)만 필요한 교통안전시설
• (Case 2) 인덱스정보(차로정보, 회전정보)와 위치정보가 필요한 교통안전시설
• (Case 3) 수치정보(속도, 중량 등)와 위치정보가 필요한 교통안전시설
• (Case 4) 인덱스정보, 수치정보와 위치정보가 필요한 교통안전시설
이들 위치정보, 인덱스정보, 수치정보 활용상황을 토대로 세 가지 ‘부가정보’ 형태를 A, B, C 타입으로 구분하였다. Table 5는 구분된 ‘부가정보’를 제시한다.
Table 5.
Supplementary information type
1) 부가정보 타입A
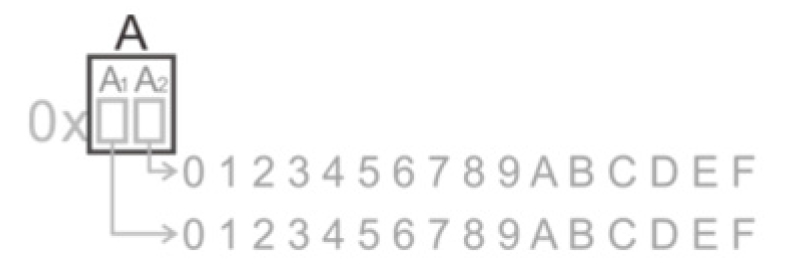
‘부가정보’ 타입A는 1byte/회 저장 공간을 활용할 수 있다. 여기서 1byte는 16진수 2자리를 갖고 있을 수 있으며, 각 자리마다 16개의 값(0-9, A-F)으로 표현이 가능하다. 첫째자리 값 A1과 둘째자리 값 A2 2가지 정보를 조합하는 방식으로 다양한 ‘부가정보’ 생성이 가능하다. Figure 2는 이를 도식화하여 제시한다. 이들 두 가지 자리 수 조합으로 총 256가지(16×16)의 조합을 활용하는 ‘부가정보’ 타입A 활용방안이 마련되었다.
앞서 진단한 ‘부가정보 활용방안 중(Case 1-4)’ ‘인덱스정보’ 활용을 필요로 하는 교통안전시설 40종을 활용상황을 재검토하여 (1) ‘차로정보’와 (2) ‘회전정보’를 설계하였다. 도로 기하구조 정보에 해당하는 정보로 세부 요소정보 ‘A1’에서는 ‘차로정보’를, ‘A2’에서는‘회전정보’ 및 ‘전용차로 여부’ 정보를 전달하도록 설계하였다. Table 6은 이에 대한 설명을 요약하여 제시한다.
Table 6.
Element value of supplementary information A
설계된 내용에 따라 A1과 A2에 별도의 인덱스 정보를 부여하였으며 그 결과는 Table 7과 같다. 이때 ‘지점정보’ 규제와 ‘구간정보’ 규제를 구분하여 교통안전시설 고유코드 번호에 따라 선택적으로 정보를 활용할 수 있도록 하였다.
Table 7.
Definition of supplementary information A value by hex code
2) 부가정보 타입B
‘부가정보’ 타입B는 1byte/회 공간을 활용할 수 있다. 1byte는 0-255의 문자를 표현할 수 있다. 이를 활용하여 10진수로 입력된 수치정보를 16진수로 변환하여 교통안전시설 규제정보를 제공할 수 있도록 설계하였다. ‘부가정보’ B가 필요한 교통안전시설은 10종이다. 개별 교통안전시설 별로 제공하는 정보와 활용 예시를 Table 8에 제시하였다.
Table 8.
Use of supplementary information B
3) 부가정보 타입C
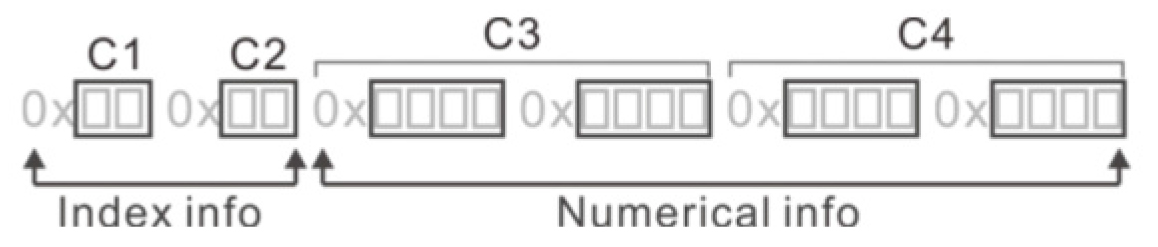
‘부가정보’ 타입C는 10bytes/회 공간을 활용할 수 있다. 이 중 2bytes는 인덱스 정보를 활용한다. 나머지 8bytes는 수치 정보를 활용하도록 설계하였다. Figure 3은 2bytes로 구성된 인덱스 정보 C1, C2와 8bytes로 구성된 수치정보 C3, C4를 제시한다.
앞서 진단한 ‘부가정보’ 활용방안 Case 1-4 중 인덱스 정보와 수치 정보가 동시에 필요한 교통안전시설 총 13종에 대하여 검토하여 (1) 허용 vs. 금지, (2) 요일제, (3) 적용시간 정보 등에 대한 인덱스 설계를 수행하였다. 해당 조합을 토대로 ‘부가정보’ 타입C의 ‘인덱스정보’ 종류로 총 4개를 마련하였다(C1, C2와 수치 정보 C3, C4). Table 9는 이들 ‘인덱스정보’ 종류를 제시한다.
Table 9.
Definition of supplementary information C value by hex code
C1은 시차제(예; 시차제 좌회전 허용) 및 요일제(예; 주말 버스전용차로 운영) 운영 등에 활용할 수 있도록 허용/금지에 대한 정보를 전달할 수 있게 한다. C2는 요일제 운영 등에 활용할 수 있도록 ‘평일제’, ‘주말제’, ‘전일제’ 여부에 대한 정보를 전달할 수 있게 한다. C3과 C4는 운영시간 정보를 전달하며 ‘시작시간’ 및 ‘종료시간’ 정보를 전달할 수 있게 한다. C4는 이들 운영 시간이 두 가지인 경우(예; 버스전용차로 운영시간이 오전 및 오후로 구분되는 경우) 활용될 수 있게 한다. 이렇게 설계된 내용에 따라 C1과 C2의 인덱스 정보를 부여하였으며 그 결과는 Table 10과 같다.
Table 10.
Definition of supplementary information C1 & C2 value by hex code
C3와 C4는 ‘시작시간’ 정보와 ‘종료시간’ 정보를 입력하여 운영시간 정보가 전달 될 수 있도록 설계하였다. 이들 ‘시작시간’ 정보와 ‘종료시간’ 정보는 각각 2bytes, 총 8bytes 공간을 사용한다. 이러한 방식으로 설계된 정보제공 활용예시는 Table 11과 같다.
Table 11.
Use of supplementary information C3 & C4
| Example | Input (Dec code) | Hex code | Translate | |
| Division | Time | |||
| Start | 07:30 | ‘0730’ | 0x02DA | 07:30-09:00 |
| End | 09:00 | ‘0900’ | 0x0384 | |
| Start | 18:00 | ‘1800’ | 0x0708 | 18:00-20:00 |
| End | 20:00 | ‘2000’ | 0x07D0 | |
이는 버스전용차로가 오전 07:30-09:00과 오후 18:00-20:00 동안 운영되는 활용되는 예시이다. 자율주행차는 해당 정보를 수령하여 해당시간에 버스전용차로로 진입을 하지 않게 하여 안전을 확보하게 한다.
데이터 셋 구성의 조합
현장에 있는 여러 종류의 교통안전시설은 경우에 따라 ‘부가정보’가 필요하다. 그러나 그렇지 않을 수 도 있다. 시설에 따라 작은 량의 데이터를 활용하기도 하나, 반대로 큰 량의 데이터를 사용하기도 한다. 상황에 따라 다르다. 이러한 현장 상황을 고려하면 하나의 IoT 장치에 최대한 많은 교통안전시설 정보를 함께 담아 전송하면 경제적으로 유리할 수 있다. 하나의 지주에 여러 개 안전표지가 설치된 경우가 그러하다. 제한적인 데이터 패킷 공간에 최대로 많은 양의 정보를 담을 수 있는 것이 공학적으로 유리하다. 앞서 설명된 ‘기본정보’ 및 ‘부가정보’ 데이터셋 구성을 조합하여 전체 데이터 패킷 용량 28bytes/회에 적용할 수 있는 방안을 설계하였다. 해당 과정으로 총 5가지 통신 메시지 데이터 셋이 도출되었다.
1. D2V 통신 메시지 데이터 셋 타입 1
하나의 위치 정보에 많은 양의 교통안전시설 정보를 담을 수 있는 D2V 통신 메시지 데이터 셋 타입 1을 개발하였다. D2V 통신 메시지 데이터 셋 타입 1에는 최대 1개 위치정보와 7개 교통안전시설 정보를 전송할 수 있다. 데이터 패킷 공간은 기본 요소 정보 10bytes, 위치 정보 8bytes, 교통안전시설 정보 14bytes로 구성된다. 설계된 D2V 통신 메시지 데이터 셋 타입 1의 데이터 패킷 구성은 Table 12와 같다.
Table 12.
D2V communication message data set type 1 dataset
2. D2V 통신 메시지 데이터 셋 타입 2
근접한 두 개의 위치 정보의 교통안전시설 정보를 하나의 IoT 장치에 담고 전송할 수 있는 D2V 통신 메시지 데이터 셋 타입 2를 개발하였다. 데이터 용량에 따라 첫 번째 위치 정보에는 교통안전시설 정보 2개를 담을 수 있고, 두 번째 위치 정보에는 교통안전시설 정보 1개를 담을 수 있도록 설계하였다. 각각의 정보에 투입된 데이터 패킷 용량은 기본 요소 정보 10bytes, 위치 정보 16bytes, 교통안전시설 정보 6bytes로 구성하였다. 설계된 D2V 통신 메시지 데이터 셋 타입 2의 데이터 패킷 용량은 Table 13과 같다.
Table 13.
D2V communication message data set type 2 dataset
3. D2V 통신 메시지 데이터 셋 타입 3
하나의 위치 정보에 ‘부가정보’ 제공이 필요한 교통안전시설 정보를 담을 수 있는 D2V 통신 메시지 데이터 셋 타입 3을 개발하였다. D2V 통신 메시지 데이터 셋 타입 3에는 ‘부가정보’를 활용할 수 있는 4개의 교통안전시설 정보와 1개의 ID 정보만 제공할 수 있는 교통안전시설 정보 총 5개를 전송할 수 있다. 각각의 정보에 투입된 데이터 패킷 용량은 기본 요소 정보 10bytes, 위치 정보 8bytes, 교통안전시설 정보 14bytes(교통안전시설 정보 10bytes와 ‘부가정보’ 4bytes)로 구성하였다. 이때 세부 정보는 ‘부가정보’ A와 B가 활용 된다. 설계된 D2V 통신 메시지 데이터 셋 타입 3의 데이터 패킷 용량은 Table 14와 같다.
Table 14.
D2V communication message data set type 3 dataset
4. D2V 통신 메시지 데이터 셋 타입 4
근접한 두 개의 위치 정보에 ‘부가정보’가 필요한 교통안전시설이 설치되어 있는 경우 2개의 ‘위치정보’와 ‘부가정보’를 전송할 수 있는 D2V 통신 메시지 데이터 셋 타입 4를 개발하였다. 각각의 정보에 투입된 데이터 패킷 용량은 기본 요소 정보 10bytes, 위치 정보 16bytes, 교통안전시설 정보 6bytes(교통안전시설 정보 4bytes와 ‘부가정보’ 2bytes)로 구성하였다. 이때 세부 정보는 ‘부가정보’ A와 B가 활용 된다. 설계된 D2V 통신 메시지 데이터 셋 타입 3의 데이터 패킷 용량은 Table 15와 같다.
Table 15.
D2V communication message data set type 4 dataset
5. D2V 통신 메시지 데이터 셋 타입 5
하나의 위치 정보에 운영에 대한 정보 제공이 필요한 교통안전시설이 설치되어 있는 경우 ‘부가정보’ C를 활용하여 정보를 전송할 수 있는 D2V 통신 메시지 데이터 셋 타입 5를 개발하였다. D2V 통신 메시지 데이터 셋 타입 5에는 ‘부가정보’ A와 C를 활용할 수 있도록 설계하였으며, 1개의 교통안전시설 정보를 전송할 수 있도록 설계하였다. 각각의 정보에 투입된 데이터 패킷 용량은 기본 요소 정보 10bytes, 위치 정보 8bytes, 교통안전시설 정보 13bytes(교통안전시설 정보 2bytes와 ‘부가정보’ 11bytes), 빈 공간 정보 1byte로 구성하였다. 이때 세부 정보는 ‘부가정보’ A와 C가 활용 된다. 설계된 D2V 통신 메시지 데이터 셋 타입 5의 데이터 패킷 용량은 Table 16과 같다.
결론
자율주행차량에게 교통안전시설 정보를 제공하기 위하여 자율주행차량에게 필요한 요소 정보를 진단하고, 이를 토대로 D2V 통신 메시지 데이터 셋 5종(1종은 최대 1개 위치정보와 7개 시설정보, 2종은 최대 1개 위치정보와 2개 시설정보, 3종은 최대 1개 위치정보와 5개 시설정보, 4종은 최대 2개 위치정보와 2개 시설정보와 ‘부가정보’, 제5종은 1개 위치정보와 1개 ‘시설정보’와 ‘부가정보’)을 개발하였다. 교통안전시설과 관련되는 세부 ‘부가정보’를 인덱스 정보, 수치 정보, 운영 정보로 구분하여 실제 현장에서 교통안전 확보를 할 수 있도록 디지털 데이터 셋을 설계하였다.
다양한 주변 환경 요인(기상, 가로수, 불법 주정차 차량)들로 인하여 센싱방식으로 정확한 교통안전시설 영상 이미지 정보 확보가 어려운 현재 기술을 극복하게 한다. 논문에서 언급되지 않았으나 저자들은 동적지역지도(local dynamic map, LDM)의 역할도 검토하였으나, LDM 개발 및 관리 주체를 서로 다른 기관에게 서로 미루고 있는 실정(아무도 개발 나서지 않는 시스템)이 지속될 수 있기에 본 제안된 연구 방향이 향후 진지하게 검토할 수 있는 대안 중 하나이다. 무엇보다도 본 연구를 통해 제안된 방식은 향후 자율주행차량 교통사고와 관련되어 구상권 책임으로 자유롭지 못하는 도로관리청이 제도적 부담과, 통신 등 인프라 유지관리 비용의 경제적 부담을 가볍게 하는 대안이다. 해당 부문에 대한 전문가 집단의 논의와 토의는 지속적으로 필요하다.
본 연구는 자율주행차량이 안전하게 도로를 주행할 수 있게 하는 도로 인프라 환경 마련에 기여할 수 있다는 측면에서 의미를 가진다. 단순하게 정적인 ID 정보만이 아닌 교통안전시설이 내포하고 있는 ‘부가정보’를 자율주행차량에게 제공하여 자율주행차량 제조사 들이 의지가 있는 경우 보다 안전한 주행할 할 수 있게 독려할 수 있다.
