

서론
선행연구 고찰
최적 경로 탐색 방법론
1. 링크 통행시간 산정
2. 경로 통행시간 산정
3. 최적 경로 판단
사전 분석
1. 분석환경 설정
2. 분석 결과
시뮬레이션 분석
1. 분석환경 설정
2. 분석 결과
결론 및 향후 연구
서론
교통흐름은 시공간에 따라서 빈번하게 변화하고, 교통흐름에 기반한 교통정보 또한 실시간 변동성이 존재한다. 한편 1990년대 첨단교통체계(ITS; Intelligent Transport Systems) 관련 기술이 발전하여 교통정보의 수집·가공·전달 체계가 지속해서 개선되고 있다. 이를 바탕으로 운전자에게 출발지부터 목적지까지의 경로를 제공해 주는 내비게이션 시스템이 발전하였다. 내비게이션 시스템은 교통정보를 실시간으로 수집·분석하여 운전자에게 목적지까지의 최적 경로, 예상 통행시간, 혼잡 정보 등을 제공한다. 이는 운전자의 통행시간 단축과 도로 혼잡 완화를 지원하여 네트워크 내 차량들의 원활한 통행을 유도한다.
내비게이션 시스템은 일정한 시간 간격 기준으로 집계된 교통정보를 바탕으로 링크 단위 통행시간의 대푯값을 설정하여 예상 통행시간을 차량에게 제공한다. 이 경우 차량의 현재 시점 기준의 실시간 정보를 활용하기 어렵고, 이는 곧 차량이 직면하는 교차로의 신호 현시에 대한 반영이 어려운 원인이 된다. 교통 신호에 의한 영향은 도시부 네트워크 주행 시, 통행시간에 큰 영향을 주는 요인 중 하나로, 단속류인 도시부 도로에서 차량은 출발지부터 목적지까지 주행하면서 여러 신호교차로를 직면하게 된다. 신호교차로에서 적색 신호에 의해 대기하는 시간은 차량의 총 통행시간에 영향을 미치고, 이로 인해 예상 도착시간과 실제 도착시간과의 차이가 생기게 된다. 이렇듯 교통 신호는 교통 상황의 변화에 큰 영향을 미치고 통행시간 예측에 불확실성을 발생시킨다.
최근 교통 시스템은 검지기 기술 및 커넥티드 차량(CV; Connected Vehicle)의 발전, 그리고 신호정보 개방사업으로 인해 실시간으로 다양한 교통정보를 수집하는 능력이 향상되었다. 특히, 개방된 신호정보를 통해 차량이 교차로에 도착했을 때 현시 정보, 잔여 녹색시간과 같은 신호운영정보를 파악할 수 있게 되었다. 이를 통해 차량의 교차로 진입 시점의 1초 단위의 미세한 변화를 반영하여 신호에 의한 대기시간을 정밀하게 산정할 수 있다. 이를 반영하는 경로 선택 모형을 개발하여 미시적 단계에서 차량의 현재 위치와 교차로 진입 시점 기준의 신호 연동을 고려한 최적 경로 제공이 필요하다. 이에 본 연구에서는 실시간 교통정보에 대한 접근성이 높아진 CV 환경에서 신호교차로에서의 신호운영정보를 반영하는 최적 경로 모형을 제시한다.
선행연구 고찰
경로 선택 모형은 네트워크 내 차량 통행의 효율성을 높이기 위해 수년간 지속적으로 연구되어 온 주제 중 하나이다. 기존 연구의 대다수는 주로 차량이 네트워크를 효율적으로 통과할 수 있는 경로를 제공하는 방법에 초점을 맞추어 왔다. 본 논문은 특히 차량이 목적지까지 도달하는 데 걸리는 총 통행시간을 최소화하도록 경로를 결정하는 문제를 다룬다. 이를 해결하기 위해 널리 연구된 대표적인 방법론으로는 최단 경로 탐색 알고리즘이 있다.
최단 경로 탐색 알고리즘은 정적인 환경, 동적인 환경, 그리고 실시간 환경을 모사하는 연구로 확장되어왔고, 통행시간이 결정론적인 문제에서 확률론적인 문제로 발전해왔다. Dijkstra(1959)는 그래프 내 특정 정점에서 다른 모든 정점까지의 단일 출발점에서의 최단 경로를 탐색하는 알고리즘을 개발하였다. 알고리즘의 각 단계마다 현재까지 알려진 가장 짧은 경로를 기반으로 다음 정점을 선택하는 방식으로, 모든 링크에 대한 계산을 할 필요가 없다는 장점이 있다. Hall(1986)과 Hall et al.(1993)은 시간에 따라 변화하는 랜덤한 통행시간을 가지는 네트워크에서 두 노드 사이의 최소 통행시간 기댓값을 가지는 경로를 탐색하는 문제를 연구하였다. 이는 최적 경로 선택이 단순한 경로가 아니라 적응형 의사결정 규칙임을 보여주었다. Miller-Hooks and Mahmassani(1998)는 라벨 수정 알고리즘에 착안하여, 시간별 및 링크별로 확률적으로 독립적인 링크 통행시간 변수들을 가정하고 최소 통행시간 기댓값을 산정하여 경로 문제를 해결하고자 하였다. 하지만 실제 네트워크에서의 성능 평가가 필요하고, 링크 통행시간의 불확실성에 대한 고려를 하지 못한 한계가 있다. Gao and Chabini(2006)는 목적지까지의 단일 경로를 제공하는 것이 아닌 다음 교차로까지의 경로를 제공하는 경로 정책 알고리즘을 제안하였다. 이는 실시간으로 변화하는 교통정보를 반영하는 측면에서 정적인 단일 경로 대비 정보 정확도 및 통행시간 측면에서 우수한 것으로 보였다. Du et al.(2012)와 Du et al.(2013)는 통행시간과 통행시간 변동성을 고려한 의사 결정 방법을 고안하였다. 방법론 검증을 위해 실시간 정보를 활용하여 실시간으로 갱신되는 통행시간 분포를 통해 경로 정책 알고리즘의 우수성 입증하였다. 차량 경로 문제와 관련하여, 기존 연구 대부분은 링크 통행시간 산정 시, 고정 값 및 특정 통행시간 확률 분포를 활용한다.
일부 연구에서는 효율적인 경로 제공을 위해 교통 신호에 의한 영향을 고려하였다. Chen and Yang(2000)은 신호교차로가 존재하는 네트워크에서 신호 제약을 반영한 최단 경로 문제를 해결하고자 하였다. 신호에 의한 대기시간과 링크 주행시간을 통해 경로 통행시간을 산정하였지만, 결정론적이고 정적인 링크 통행시간만을 고려하였다. Yang and Miller-Hooks(2004)는 신호교차로에서의 지체를 반영한 통행시간을 통해 최적 경로를 탐색하고자 하였다. 차량이 교차로에 진입하는 시점에 따라 신호 지체로 인하여 통행시간이 변동하는 점을 전체 경로 통행시간에 반영하였다. 하지만 이는 차량의 교차로 진입 시점을 확률적으로 다루어 개별차량이 교차로에 진입한 시점에서의 정밀한 지체시간을 산정하기 어려운 환경이다. Shen et al.(2020)은 신호교차로에서 링크 통행시간의 불확실성을 고려하는 경로 탐색 알고리즘을 제안하였다. 신호교차로에서 발생하는 지체와 링크 통행시간의 상관관계는 최적 경로에 영향을 미칠 수 있음을 나타냈고, 신호 지체를 고려하지 않으면 통행시간이 과소평가됨을 확인하였다. 하지만 링크 통행시간 산정 시, 신호 지체의 평균값을 사용하여 시간 흐름에 따른 지체를 고려하지 못하였다. Shi et al.(2023)는 차량이 교차로 접근 시, 경로상 모든 교차로의 신호정보를 고려하여 최적경로를 도출하고자 하였다. 하지만 신호에 의한 영향을 신호주기 대비 녹색현시 비율로 반영하여 차량이 개별적으로 경험하는 지체를 반영하지 못하였다.
기존 연구에서는 링크 통행시간 산정 시, 주로 신호 지체의 평균 및 교차로 녹색현시 비율 등을 사용하였다. 이는 개별차량의 교차로 진입시점에 따라 경험하는 상이한 신호 대기시간을 고려하지 못한다. 또한 연동된 신호 시스템에서의 신호운영정보를 반영한 목적지까지의 경로를 제공하는 연구는 아직 미흡한 실정이다. 본 연구에서는 신호운영정보를 활용하여 차량의 경로상 연속된 교차로에서의 링크 통행시간을 정밀히 산정하여 개별차량의 교차로 진입 시점 기준의 최적 경로를 탐색하는 알고리즘을 제시한다.
최적 경로 탐색 방법론
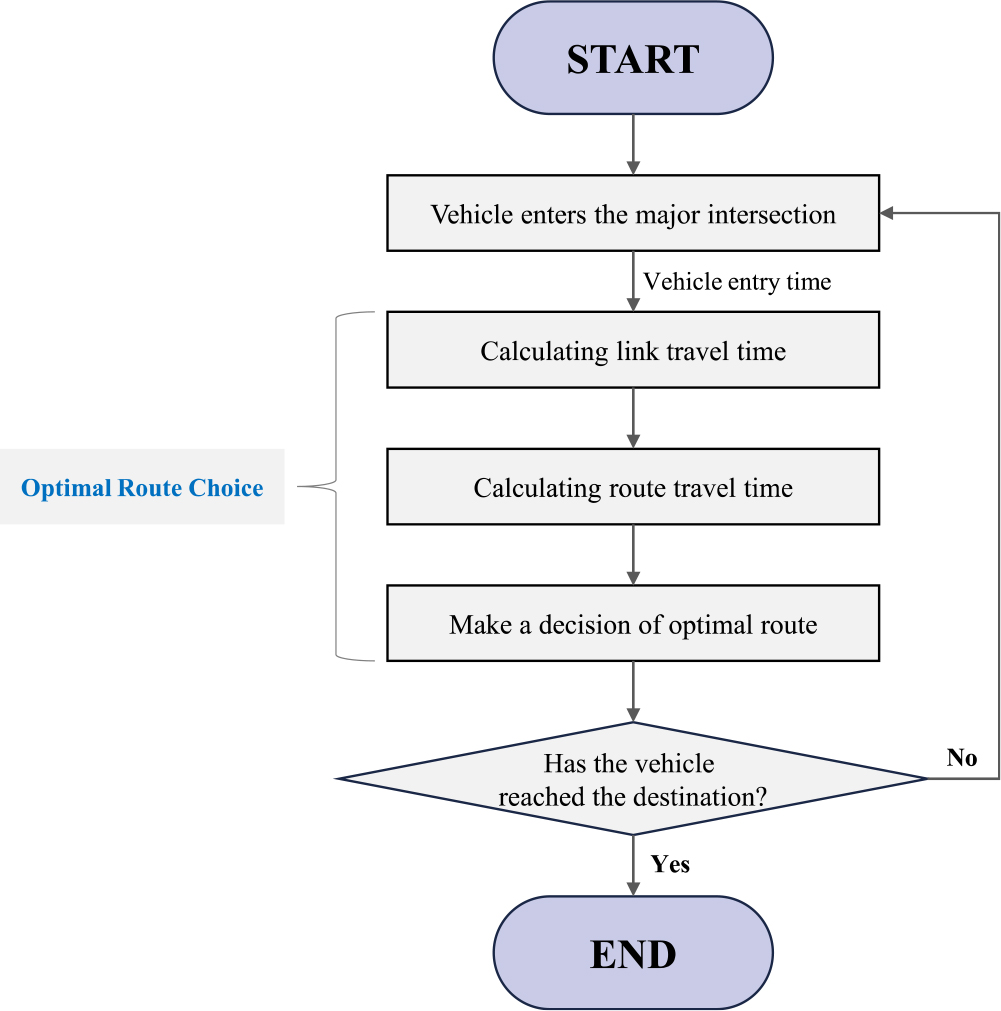
본 연구의 경로 선택 모형은 개별차량이 주요 교차로에 진입한 시점에 링크 통행시간을 산정하여 교차로 통과 시점을 예측하여 최적 경로 탐색을 수행한다. 이때 주요 교차로란, 경로 탐색을 수행하도록 사전에 설정한 교차로로 주로 3지 교차로, 4지 교차로에 해당한다. 이때, 네트워크 내 주요 교차로의 신호 주기를 동일하게 조정하고, 현시 시간 또한 비례하게 조정한다. 본 연구의 모형 설계 범위는 적은 주요 교차로로 이루어진 소규모 네트워크이며, 차량은 적색 교통 신호에 의해서만 정지하고 다른 차량에 의한 영향을 받지 않는다고 가정하였다. 현재 모형에서는 신호 대기시간을 정밀히 산정하는 것에 초점을 두어 대기차량에 의한 영향은 고려하지 않는다. 본 연구의 경로 선택 모형의 흐름도는 Figure 1과 같다. 차량이 목적지에 도달할 때까지 교차로 진입 시점마다 링크 통행시간 산정, 경로 통행시간 산정, 최적 경로 탐색 단계로 구성된 최적 경로 탐색을 반복하여 경로를 갱신한다. 차량이 마지막 교차로를 통과하여 목적지에 도달한 경우 경로 탐색을 종료한다.
1. 링크 통행시간 산정
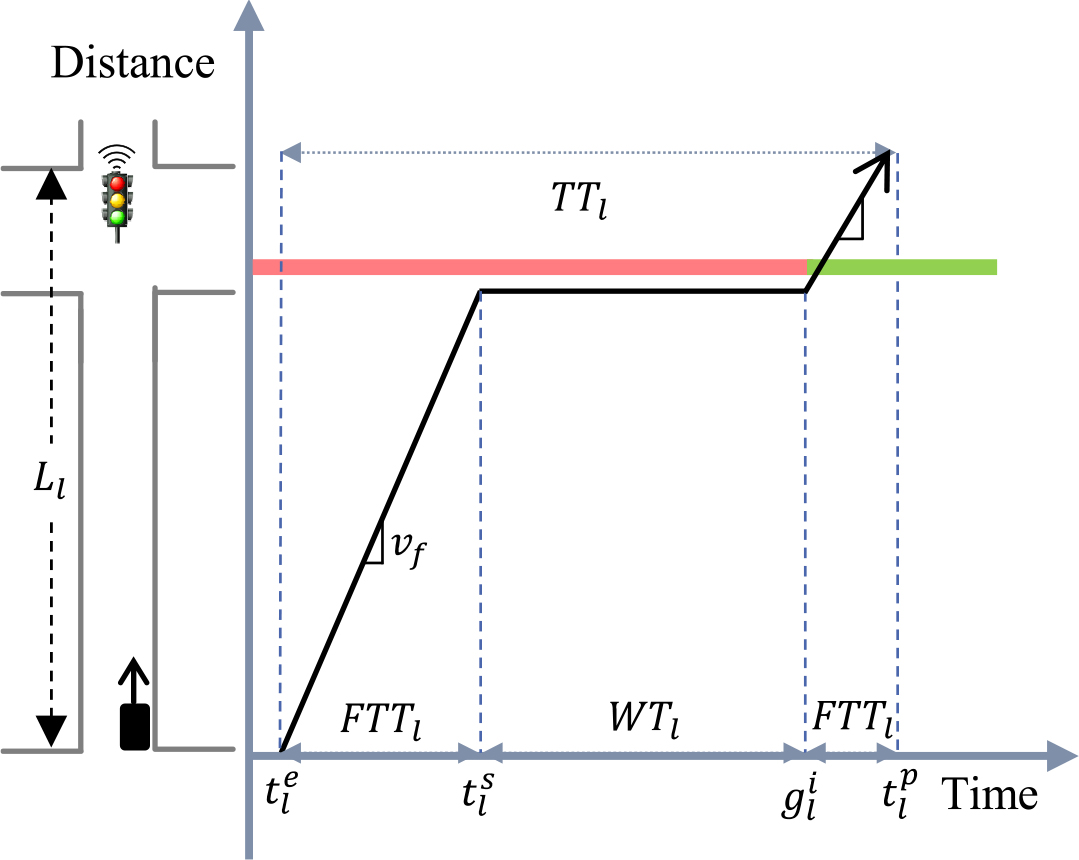
본 연구의 모형에서는 자유통행시간과 신호 대기시간을 활용하여 링크 통행시간을 산정하였다. 자유통행시간은 차량 및 신호에 의한 영향을 받지 않고 주행한 시간으로 링크 길이를 제한속도로 나눈 값을 사용하였다. 신호 대기시간은 차량이 교차로 링크 구간을 주행하며 교차로 적색 신호에 의해 녹색 현시 등화 전까지 대기한 시간으로 Jeon et al.(2024)의 연구에서 제안하는 추가통행시간 산정 방법을 차용하였다. 본 연구에서는 개별차량이 다른 차량에 의한 영향을 받지 않으므로 교차로에 진입한 시점에 자유통행시간을 더한 시점을 기반으로 신호 대기시간을 산정하게 된다. 결과적으로 링크 통행시간은 교차로 진입 시점부터 교차로 진출 시점까지 걸리는 시간이며 Equation 1, 2, 3, 4와 같이 정의된다.
where, : travel time on intersection link (sec)
: entry time on intersection link (sec)
: passage time on intersection link (sec)
: free flow travel time on intersection link (sec)
: waiting time incurred by signalized intersection on intersection link (sec)
: green phase initiation time on intersection link (sec)
: arrival time at the stop line on intersection link (sec)
: length of intersection link (meter)
: free-flow travel speed(speed under ideal conditions without traffic congestion) (meter/sec)
링크 통행시간 산정 방법론을 바탕으로 개별차량의 교차로 링크 주행 궤적을 시공도로 표현하게 된다면 Figure 2와 같이 나타난다. 이를 통해 교차로 진입부를 기준으로 1초에 한 대씩 차량이 균등하게 발생하는 상황을 가정하여 교차로 이동류 링크별로 교차로 신호주기만큼 1초 단위로 진입 시점별 링크 통행시간 데이터를 구축한다. 차량의 통행 패턴은 교차로 신호주기마다 반복되어 신호주기 내 동일한 진입 시점에 진입한 차량은 유사한 패턴의 교통 흐름을 갖는다고 가정하였다.
2. 경로 통행시간 산정
경로 통행시간은 앞서 구축한 교차로 이동류별 링크 통행시간 데이터를 바탕으로 출발지부터 목적지까지의 경로상 경유하는 모든 교차로의 링크 통행시간 기댓값의 합으로 산정한다. 차량이 교차로 진입 시, 교차로 정지선 도착 시점이 예측되면 링크 주행 중의 오차를 반영하여 해당 시점 근방의 범위 내에 도착하는 것을 가정한다. 이때 통행시간 오차 범위인 불확실성 가중치는 교통량이 적은 환경에서 타 교통량에 의한 간섭이 적고, 일부 감가속에 의한 영향이 존재할 것으로 보아 ±2초를 적용하였다. 교차로 정지선 도착 예측 시점이 해당 범위에 속하는 데이터들을 추출하여 링크 통행시간 기댓값을 산정한다. 링크별로 통행시간에 대한 분포를 살펴보면 교통 흐름에 따라 예상시간에 비해 빠르게 도착할 수도 있고, 뒤늦게 도착할 수도 있다. 이러한 점에서 차량의 교차로 진입 시점과 현재 위치를 기반으로 예상되는 통행 궤적이 정해지지만 교차로 정지선 도착 시점을 예측하는 것에 불확실성이 존재함을 고려한다. 또한, 불확실성 가중치는 현재 차량의 위치로부터 먼 하류부 교차로 링크의 통행시간을 예측할수록 정보의 불확실성이 크다는 가정으로 Equation 5와 같이 설정한다.
where, : weight factor of travel time uncertainty
: the number of intersections traversed along the route from the current location to the destination
𝛼 : the order of the intersection traversed along the route from the current location to the destination ()
교차로 진입 시점()을 바탕으로 교차로 정지선 도착 시점()이 정해지면 Figure 3과 같이 도착 시점에서 불확실성 가중치만큼 뺀 값부터 더한 값까지의 범위에 해당하는 통행시간 데이터를 추출한다. Equation 6과 같이 해당 데이터 행의 통행시간() 평균 값이 출발지부터 목적지까지의 교차로 링크 에서의 통행시간 기댓값이 된다. 이후 차량이 상류 교차로를 진출하는 시점이 하류 교차로에 진입하는 시점이 되어 링크 통행시간 기댓값을 산정한다. 이를 통해 교차로 구간 간의 연속된 흐름과 불확실성을 고려한다. 이때, 차량의 현재 위치 기준으로 하류 교차로의 링크 통행시간 기댓값을 산정하므로 불확실성 가중치 값이 커지게 된다. Equation 7과 같이 출발지부터 목적지까지의 경로 통행시간은 경유하는 모든 교차로에서의 링크 통행시간 기댓값의 합을 통해 경로 단위 차량의 예상 궤적을 기반으로 경로 통행시간을 산정하게 된다.
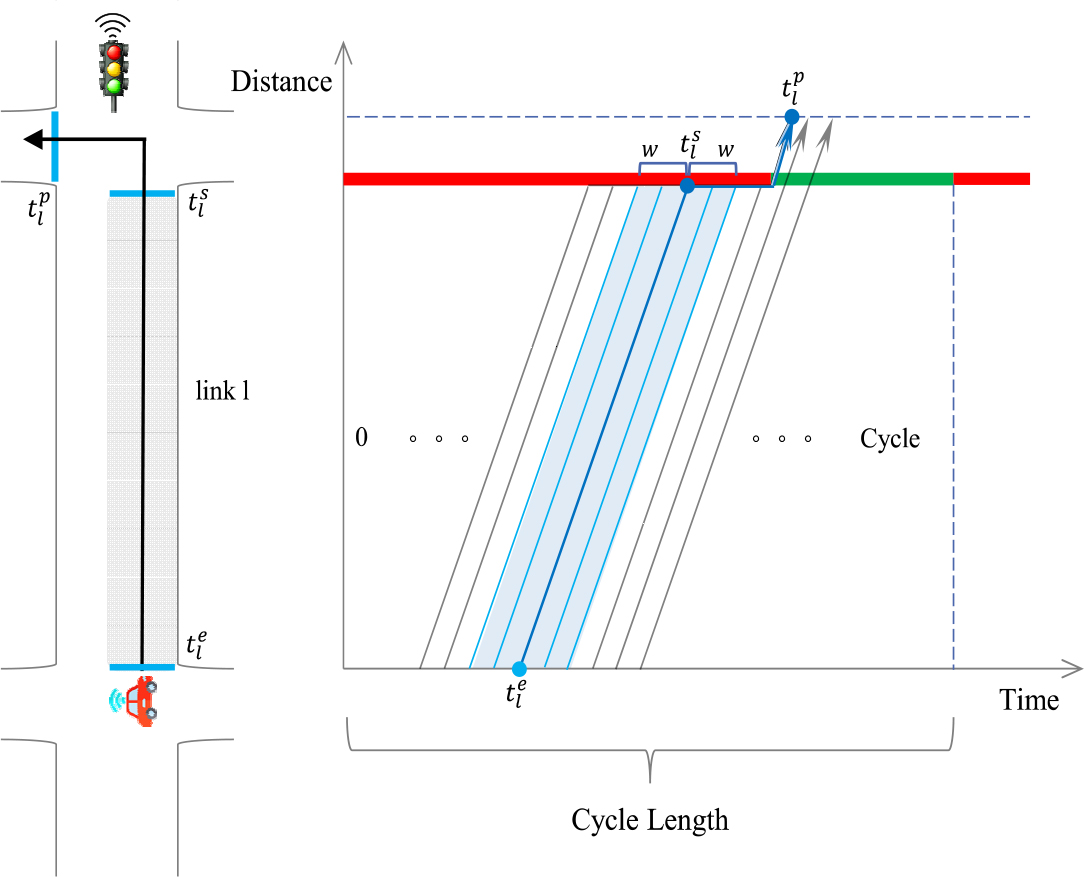
where, : expectation value of link travel time on intersection link (sec)
: travel time of a data arrived at stop line on intersection link at time (sec)
: route travel time(sec)
3. 최적 경로 판단
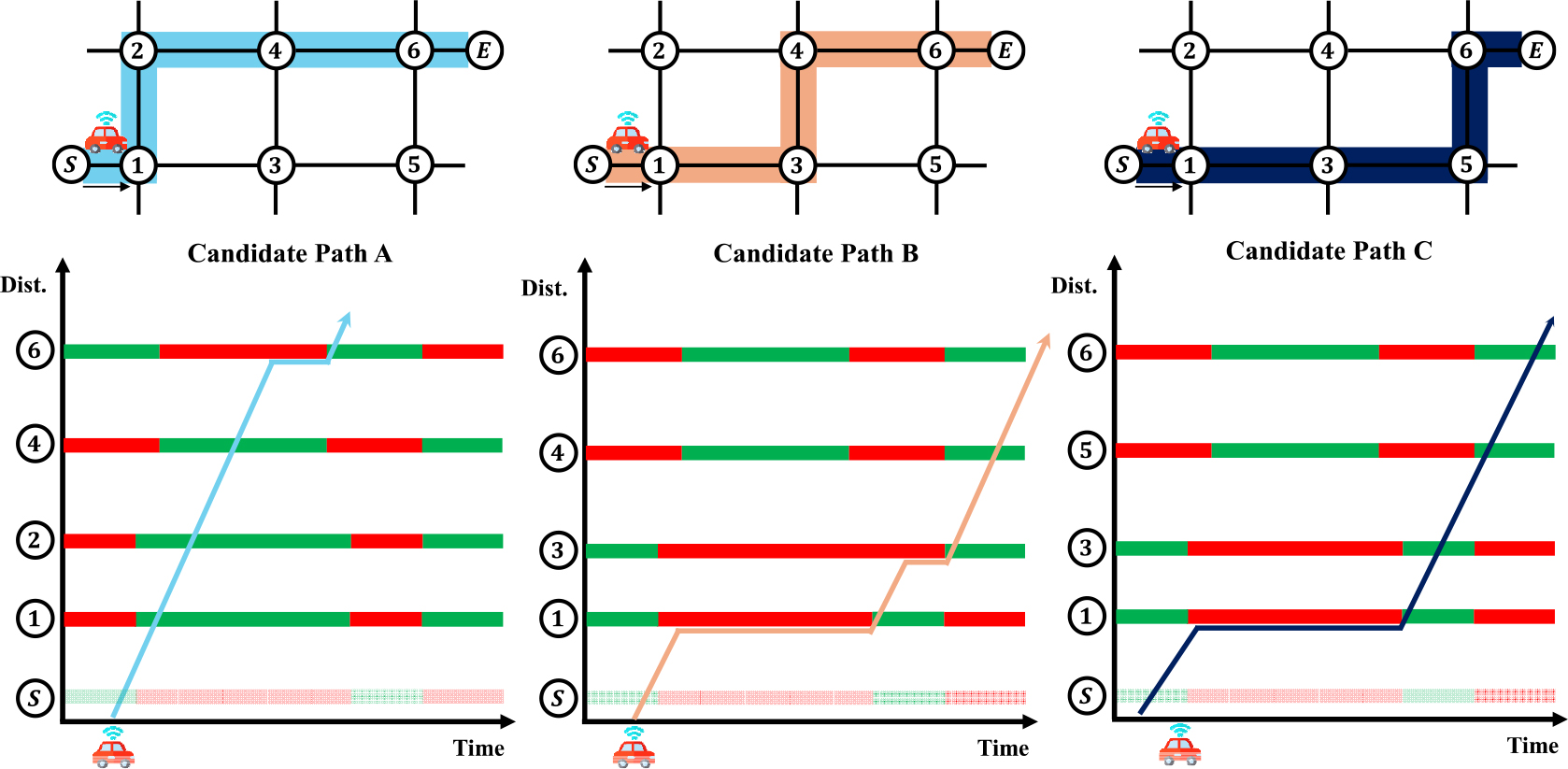
본 연구에서는 최적 경로를 ‘출발지부터 목적지까지 최소 통행시간으로 통행하는 경로’로 정의한다. 최적 경로 판단을 위해 차량의 현재 위치부터 목적지까지 주행 가능한 후보 경로별로 경로 통행시간을 산정한다. 이때 후보 경로란, 출발지부터 목적지까지 우회없이 목적지 방향으로 통행하는 경로를 의미한다. 예를 들어 3x2 네트워크에서의 후보 경로는 총 3가지이며 예시는 Figure 4와 같다.
Equation 8과 같이 차량의 현재 위치부터 목적지까지 주행 가능한 모든 후보 경로의 경로 통행시간을 산정한 후 비교하여 후보 경로 중 경로 통행시간이 가장 작은 경로를 최적 경로로 판단하여 개별차량에게 제공한다. 경로를 제공받는 차량은 예외없이 해당 경로를 따라 주행한다고 가정한다.
where, : optimal route starting from the current location to the destination
: route travel time of route R
: set of candidate routes starting from the current location to the destination
사전 분석
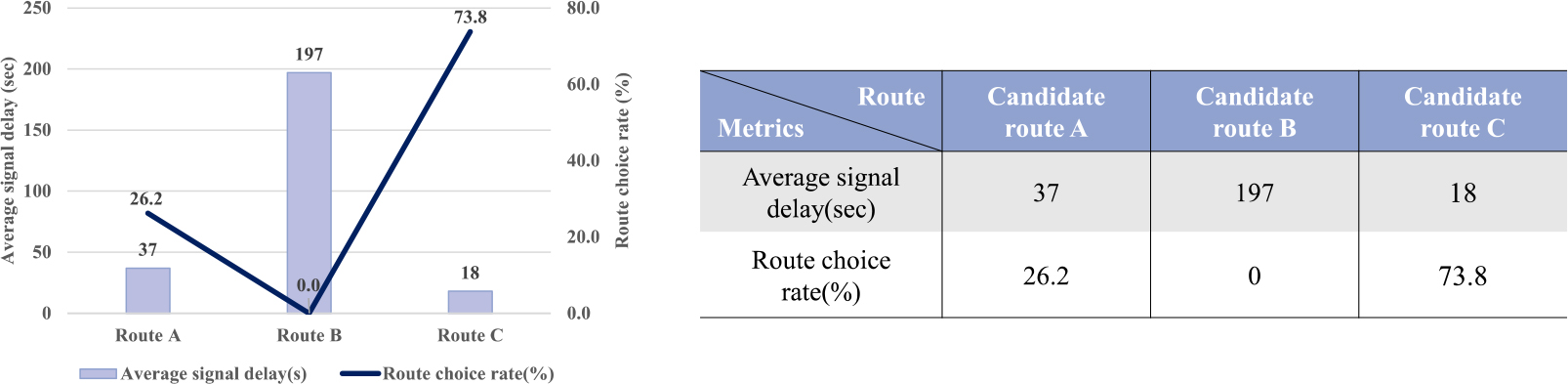
본 연구를 통해 개발한 모형이 신호 연동성 기반의 최적 경로를 제공하는지 검증하고자 사전 분석을 수행하였다. 개별차량 1대가 1초 단위로 (1~교차로 신호주기)초에 해당하는 시간 동안의 시점별로 출발지를 기점으로 제안 모형이 제공하는 경로를 따라 통행할 때 차량의 최종 경로를 확인한다. 이때, ‘경로 채택율’이라는 별도의 지표를 설정하였다. 경로 채택율은 차량이 특정 후보 경로를 통행한 확률로 차량 진입 시점별 경로 통행 횟수를 교차로 신호주기로 나눈 값이다. 또한 본 연구에서의 신호 연동성 평가 기준은 출발지부터 목적지까지의 신호 대기시간이다. 차량의 출발지 진입 시점별로 경험하는 교차로 신호 대기시간의 총합을 교차로 신호주기로 나눈 ‘신호 대기시간 평균’ 값을 경로 채택율과 비교하여 경향성을 확인하였다.
분석 도구는 Python으로 네트워크 교차로의 링크 길이, 교통 신호기 등을 구현하여 현실 상황을 일부 모사하였다. 교차로 신호주기 내 동일한 진입 시점에 진입한 차량은 유사한 패턴의 교통 흐름을 갖도록 네트워크 내 모든 신호교차로의 신호주기를 통일하였다. 또한, 차량은 직진 현시에 의해 우회전을 수행하도록 설정하였고 U턴은 고려하지 않았다.
1. 분석환경 설정
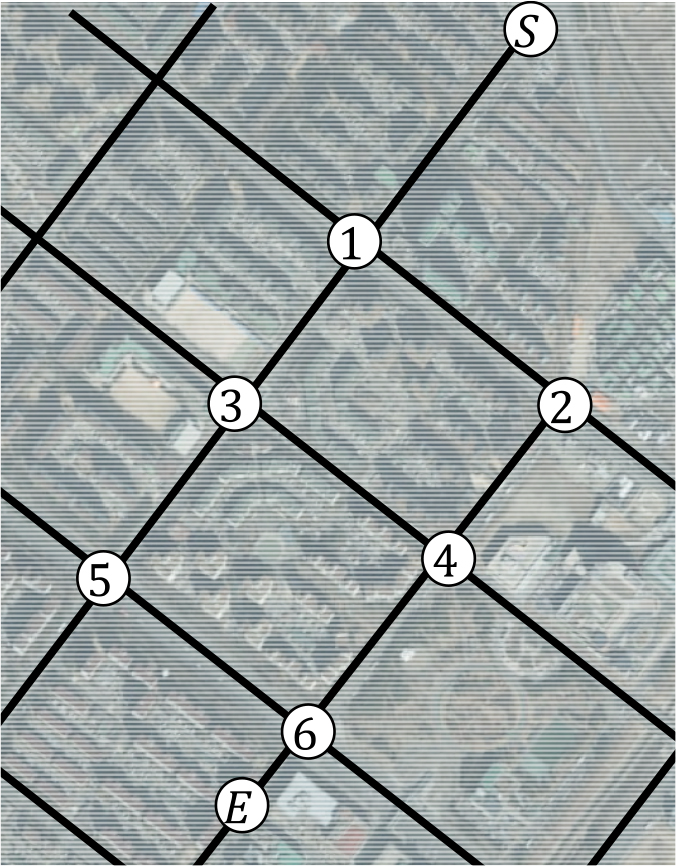
사전 분석의 공간적 범위는 Figure 5와 같이 서울시 강남구 대치/개포동 일대 구간의 3x2 네트워크로 설정하였다. 분석 네트워크의 녹색 신호 비율과 현시 순서는 현황 TOD 계획을 바탕으로 설정하였으나, 적색 신호에 의한 대기시간 외 요인을 제어하기 위하여 경로별 길이를 동일하게 조정하였다. 네트워크 내 주요 교차로는 1번 교차로부터 6번 교차로로 총 6개소이며, 차량의 출발지는 1번 교차로(도곡역 교차로) 북측 상류부, 목적지는 6번 교차로(경기여고 교차로) 남측 하류부로 지정하였다. 개별차량이 주행하는 경로는 총 3가지로 1, 2, 4, 6번 교차로를 통과하는 후보 경로 A, 1, 3, 4, 6번 교차로를 통과하는 후보 경로 B, 그리고 1, 3, 5, 6번 교차로를 통과하는 후보 경로 C를 통해 목적지에 도달하게 된다. 분석 시 녹색 신호 비율과 현시 순서는 현황 TOD 중 비첨두 시간대에 해당하는 값을 바탕으로 설정하였고, 모든 교차로의 신호주기는 160초로 동일한 상황이다. 신호에 의한 대기시간 외 변인을 통제하기 위해 후보 경로별 주행시간이 동일한 수준이 되도록 링크 길이를 조정하였다. 네트워크를 통행하는 차량의 속도는 40km/h로 설정하였고 감가속 없이 설정된 속도로 주행한다. 네트워크에는 제어 대상 차량 외 다른 교통량은 없는 상황을 기준으로 하였다.

2. 분석 결과
Figure 6은 사전 분석 환경에서의 후보 경로별 신호 대기시간 평균과 경로 채택율을 비교한 결과이다. 신호주기 160초 만큼의 시행 횟수동안 차량을 출발시킨 결과, 신호 대기시간 평균이 18초인 후보 경로 C의 경우 118회 최적 경로로 판단되어 73.8%의 경로 채택율을 보였다. 반면, 신호 대기시간 평균이 197초인 후보 경로 B의 경우, 신호주기 내 어느 시점에 출발하여도 최적 경로로 채택되지 못하였다. 결과적으로 후보 경로의 신호 대기시간 평균 값과 경로 채택율이 반비례한 경향성을 보였고, 개발 모형이 평균적으로 신호 대기시간이 적은 경로를 제공함을 확인할 수 있었다. 또한, 차량의 교차로 진입 시점에 따라 채택되는 최적 경로가 다른 결과를 보여 시공간에 따라 다른 신호 연동성에 맞는 경로를 제공하였다고 볼 수 있다.
시뮬레이션 분석
본 연구에서 제안한 모형을 통해 개별차량에게 경로를 제공할 경우, 최소 통행시간 기준의 최적 경로를 제공하는지 검증하였다. 신호주기 1주기 단위로 개별차량의 진입 시점별로 제안 모형이 제공하는 경로를 따라서 통행할 때, 이것이 최소 통행시간의 경로인지 판단하여 최적 경로 제공율을 산정한다. 최적 경로 제공율은 개별차량이 최적 경로로 통행한 횟수를 시행횟수로 나눈 비율이다. 미시적 교통 시뮬레이션 프로그램인 SUMO를 통해 특정 시뮬레이션 시점에 차량을 출발 지점에 발생시키고 출발지부터 목적지 상에 존재하는 모든 후보 경로, 그리고 제안 모형을 통해 제공받은 경로로 통행했을 때의 통행시간을 기록한다. 시점별로 후보 경로 중 최소 통행시간의 최적 경로를 파악하고, 제안 모형 기반의 경로가 최적 경로로 통행하였는지 확인한다.
또한, 제안 모형이 다른 경로 모형보다 개선된 결과를 제공하는지 확인하고자 경로 모형 간 비교 검증을 수행하였다. 정적인 링크 통행시간을 기반으로 단일 경로를 제공하는 Dijkstra(1959)의 최단 경로 모형, 시간에 따라 변화하는 링크 통행시간을 기반으로 단일 경로를 제공하는 Miller-Hooks and Mahmassani(2000)의 Stochastic Time-Dependent(STD) 최단 경로 모형, 그리고 시간에 따라 변화하는 링크 통행시간과 불확실성을 기반으로 경로를 제공하는 제안 모형을 비교하였다. 신호주기 1주기 단위로 매초 시뮬레이션 시점에 각각의 경로 모형을 기반으로 개별차량에게 경로를 제공할 경우, 차량의 총 통행시간을 합산하여 경로 모형별로 비교하였다.
1. 분석환경 설정
방법론 분석의 공간적 범위는 Figure 7과 같이 경기도 시흥시 정왕동 일대의 3x2 네트워크로 설정하였다. 네트워크 내 주요 교차로는 1번 교차로부터 6번 교차로 총 6개소이며, 차량의 출발지는 1번 교차로(아주아파트 교차로) 북측 상류부, 목적지는 6번 교차로(계룡1차 교차로) 남측 하류부로 지정하였다. 해당 네트워크는 동서 방향 축 3개와 남북 방향 축 2개로 이루어져 있으며, 총 3개의 후보 경로가 존재한다. 1, 2, 4, 6번 교차로를 경유하는 후보 경로 A, 1, 3, 4, 6번 교차로를 경유하는 후보 경로 B, 그리고 1, 3, 5, 6번 교차로를 경유하는 후보 경로 C를 통해 개별차량은 목적지에 도달하게 된다. 각 후보 경로의 총 길이는 1.1km로 동일한 수준이다.
SUMO의 NetEdit 기능을 사용하여 분석 대상 네트워크를 구축하였으며, TraCI 기능을 활용하여 경로 모형이 제공하는 경로를 개별차량에게 제공하도록 구현하였다. Krajzewicz(2010)의 매뉴얼을 참고하여 시뮬레이션 환경에 적용한 변수들은 Table 1과 같다. 신호 현시 비율과 현시 순서는 분석 대상지의 현황 신호 계획 중 비첨두 시간대에 해당하는 값을 바탕으로 설정하였고, 모든 교차로의 신호주기는 180초로 동일한 상황이다.
Table 1.
Input data of analysis scenario
네트워크를 통행하는 차량의 속도는 40km/h로 설정하였다. SUMO 시뮬레이션 내 차량의 실질적인 행태를 모사하기 위하여 운전자가 목표 속도를 정확하게 유지하지 못하는 정도를 조절하는 ‘sigma’ 파라미터를 0.5로 설정하여 감가속을 반영하였고, 그 외 passenger vehicle의 default 파라미터를 사용하여 현실적인 교통 흐름을 조성하고자 하였다. 네트워크에는 경로 제어 대상 차량 외 다른 교통량은 없는 상황을 기준으로 하였다.
2. 분석 결과
Table 2는 SUMO 시뮬레이션을 통해 최적 경로 제공율을 산정하여 제안 모형을 평가한 결과이다. 신호주기 180초 만큼의 시행 횟수 중 제안 모형을 통해 최소 통행시간의 경로를 통행한 경우는 175회로, 약 97%로 최적 경로를 제공하였다. 이는 교차로 도착 시점 예측의 불확실성을 고려하여 일부 링크 통행시간 산정에 있어서 오차가 발생하여, 실제 최소 통행시간의 경로와 차이가 발생한 것으로 나타났다. 특히 교차로 도착 예측 시점이 해당 교차로의 녹색 현시에서 적색 현시로 전환되는 구간 부근인 경우 오차가 증가하였다.
Table 2.
Result of optimal route choice ratio
Table 3은 SUMO 시뮬레이션을 통해 경로 모형별 통행시간을 집계한 결과이다. 신호 주기 180초 만큼의 시행 횟수 동안 차량을 출발지에 투입시켜 목적지까지 통행하였을 때의 통행시간을 합산하였다. 결과적으로 매 시행 횟수마다 후보 경로 C를 통행한 Dijkstra 경로 모형의 경우 총 통행시간이 31,458초로 출발지부터 목적지까지 한 주기 평균 174.8초의 통행시간이 소요되었다. STD 경로 모형의 경우 총 통행시간은 28,980초이고, 평균 161초의 통행시간이 소요되었다. 제안 모형의 총 통행시간은 28,752초이고, 평균 159.7초의 통행시간이 소요되었다. 제안 모형의 평균 통행시간이 정적 모형 대비 8.6%, STD 모형 대비 0.8% 개선된 결과를 보였는데, 이는 연속된 교차로의 신호 영향을 고려함과 동시에 차량의 감가속으로 인한 네트워크 통행시간의 불확실성을 반영한 결과로 보인다.
Table 3.
Result of comparative analysis
결론 및 향후 연구
본 연구는 실시간 교통정보에 대한 접근성이 높아진 환경에서 신호교차로에서의 신호운영정보를 반영하는 최적 경로 모형을 제시하였다. 차량의 현재 위치와 교차로 진입 시점을 기준으로 링크 통행시간 및 경로 통행시간을 산정한 후 최적 경로를 판단하여 차량에 제공하였다. 이때 교차로 링크의 제한속도와 신호 대기시간을 사용하여 링크 통행시간을 산정하였다. 또한, 링크 통행시간 예측의 불확실성을 고려하고자 불확실성 가중치를 사용하여 경로 통행시간을 산정하였다. 이후 후보 경로별로 최소 통행시간 기준의 최적 경로를 차량에 제공하여 통행하도록 하였다.
개발한 모형이 신호 연동성 기반의 최적 경로를 제공하는지 검증하고자 사전 분석을 수행했다. 결과적으로 후보 경로의 신호 대기시간 평균값과 경로 채택율이 반비례한 경향성을 보였다. 또한, 모형이 실질적으로 최소 통행시간 기준의 경로를 제공하는지 검증하고자 하였다. 1초 단위 시점별로 차량 출발 시, 각 후보 경로와 모형이 제공하는 경로로 주행 시 통행시간을 확인하고 모형의 경로가 최소 통행시간 기준의 최적 경로인지 확인한 결과, 약 97%의 확률로 최적 경로를 제공하였다. 동일한 교차로 링크라도 차량의 교차로 진입 시점에 따라 직면하는 교차로 신호 현시가 상이함에 따라 통행시간이 달라지는 점을 반영한 결과를 보여주었다. 타 경로 모형과의 비교 검증 결과 정적 경로 모형 대비 8.6%, STD 경로 모형 대비 0.8% 평균 통행시간이 개선되었다.
그러나, 본 연구는 교통 신호에 의한 영향에 중점을 두어 방법론 및 분석환경을 설정하여 현재 단계의 모형에서는 제약 조건이 다수 존재한다. 일반적으로 링크 통행시간을 산정하는 것에 있어서 대기 차량은 상당한 영향을 주는 요소이다. 대기 차량에 의해 정지선으로부터의 차량 위치, 교차로 통과 시점 등이 달라지므로 이를 고려하지 않을 시 자유교통류 외의 환경에서 모형의 정확도가 현저히 떨어질 수 있다. 이에 다른 교통류에 의한 차량 감가속 및 대기행렬 소거시간을 반영한 개선된 연구가 필수적이다. 추가적으로 네트워크 혼잡이 심한 환경에서는 교통류 와해로 기존과 다른 교통 흐름을 보일 것으로 보인다. 이에 별도의 대기행렬 추정 방법론을 고안하여 개별차량의 교차로 진출 시점을 정밀히 산정하여 오차를 줄여 모형의 활용성을 제고할 수 있다.
또한, 현실 상황을 자세히 모사하기 위하여 보다 현실적인 시뮬레이션 환경을 구축하여 모형의 효과를 검증해야 한다. 실제 도로 네트워크는 교차로의 주기가 구역별로 동일한 경우도 있지만, 상이한 경우도 존재한다. 본 연구에서는 시뮬레이션 분석 교차로의 신호주기 길이를 180초로 통일하여 동일한 신호 정보가 수집되는 상황이다. 신호주기 내 동일한 진입 시점에 진입한 차량은 유사한 패턴의 교통 흐름을 갖는다고 가정 하에 분석을 수행했지만, 다양한 패턴의 결과 분석을 위해 다양한 신호 조건에서의 차량 경로 선택 변화를 살펴볼 필요성이 있다.
