

서론
기존 문헌 고찰
CAERUS: Control Algorithm for Delay Reduction Using Travel Time
고도화된 CAERUS: Control Algorithm for Delay Reduction Using Image Detection
단일링(Single-ring) 기준의 CAERUS
이중링(Dual-ring) 기준의 CAERUS
시뮬레이션 분석 및 결과
결론 및 향후연구
서론
1900년대 후반 일반차량의 통행이 급격하게 증가함에 따라 서울시는 교통혼잡 완화 대책으로 신신호시스템인 COSMOS를 개발하였다. 이후 COSMOS에 대한 지속적인 연구가 실시되었으나 안정성과 검치 체계에 대한 우려로 현재 국내 대부분의 신호교차로는 고정식 TOD 기반으로 운영되고 있다. 각 지자체에서는 TOD 운영 시 시간대별 패턴을 고려하여 신호시간을 설계한다. 그러나 매시간대별 교통수요는 실제 계획 교통량과 상이한 경우가 많으며 특정 이벤트로 교통수요 증가 시 불가피한 지체가 발생할 수 있다.
루프검지 기반 실시간 신호제어인 COSMOS는 운영 시 중요 교차로의 경우 직진 및 좌회전 정지선 검지기, 대기검지기, 앞막힘 검지기 등 많은 검지기를 요구한다. 또한, 루프검지기는 매설 시 도로를 재포장해야 하며 포장상태 변형 시 검지기 성능이 저하될 수 있다. 이러한 상황을 고려하여 스마트 신호운영시스템 개발 과제에서는 별도의 검지기 없이 통행시간 이력자료를 이용하여 점진적으로 각 이동류의 포화도 균등화를 수행하는 CAERUS를 개발하였다. CAERUS는 단일링과 이중링 체계에서 이동류별 녹색시간 비율을 고려하여 신호주기 증가, 감소, 녹색시간 조정을 지원한다.
최근에는 수준 높은 다양한 차량 검지시스템이 개발되었다. 특히 영상검지기의 경우 별도의 검지기 매설 없이 보다 광범위한 영역을 대상으로 이동류별 통과교통량, 속도, 대기행렬, 점유율 등을 계측할 수 있다. 즉, 고도화된 영상검지 기술을 바탕으로 효율적인 실시간 신호제어 운영이 가능해졌다. 이에 본 연구는 영상검지 기반 실시간 수요교통량을 이용하여 기존 CAERUS의 녹색시간 조정 규칙을 바탕으로 조정 조건을 체계화하여 교차로 연동 체계를 유지하는 동시에 점진적으로 이동류별 포화도 균등화가 가능하도록 고도화하였다.
기존 문헌 고찰
본 장에서는 국내 인프라 환경에 도입 가능한 능동형 신호제어 전략을 설계하기 위해 실시간 신호제어에 관한 내용을 고찰하였다.
1990년대에 개발된 국내 실시간 신호제어시스템 COSMOS(Cycle, offset, split, model of Seoul)는 서울시 교통혼잡 해소를 위한 목적으로 개발되었다(Seoul Metropolitan Police, 2002). COSMOS는 영국의 SCOOT, 호주의 SCATS, 이탈리아의 UTOPIA, 미국의 OPAC 등의 실시간 신호시스템보다 다소 늦게 개발되었으나 지속적인 기능 개선을 통해 적합한 시스템으로 자리매김하였다(An and Lee, 2006). Baek et al.(2004)은 TOD 제어 방식의 신호교차로로 인해 교통량 변화에 효율적으로 대응하지 못하는 국도의 성능을 개선하기 위해 COSMOS를 적용하여 통행속도와 대기행렬 길이를 개선하였다. Lee et al.(2003)은 과포화 시 COSMOS의 대기행렬 성장관리에 대한 전략을 보완하기 위해 내부미터링과의 병행 운영 전략을 제시하였다. Song and Lee(2007) 또한 내부 미터링 전략을 이용하여 과포화 시 네트워크 내 차량의 총 지체를 최소화할 수 있는 신호제어 알고리즘을 개발함으로써 기존 COSMOS보다 더 나은 지체를 도출하였다. Kim and Kim(2019)은 교차로 단위 기준의 COSMOS 앞막힘 예방제어의 한계를 보완하기 위해 네트워크 단위의 제어 전략을 개발하였다.
Byeon et al.(2007)은 운영자적 측면에서 COSMOS 실시간 신호운영시스템 운영 효율화 방안을 제시하였다. TRC 운영의 경우 긴 횡단보도나 교통량 패턴 변동이 미미한 곳에서는 효과가 거의 없었으며 좌회전 감응 제어의 경우 횡단보도와 연계된 교차로, 좌회전 차량이 과다하거나 동시 신호로 운영되는 교차로에서 부적절한 효과를 야기함에 따라 해당 부문에 대한 알고리즘 기능 개선을 제언하였다. Kim and Kim(2016)은 교통조건, 기하구조 조건, 검지기 설치 위치에 따른 실시간 신호제어시스템 포화도 추정 패턴을 분석하였다. 진단 결과 검지기가 모든 직진차로에 설치되고, 공유차로가 포함되지 않고, 공유차로와 인접한 전용차로가 아닐수록 포화도가 안정적으로 추정되었다. Park and Jeong(2016)은 COSMOS의 점유율 기반 실시간 신호제어 알고리즘을 보완하기 위해 통행시간 기반 포화도와 루프검지기 포화도를 융합하여 신호시간을 산정하는 새로운 실시간 신호제어 알고리즘을 제시하였다. Korean National Police Agency(2019)는 교통정보 빅데이터 뱅크의 통행시간 자료를 이용해 예측한 수요교통량을 바탕으로 실시간 신호제어를 수행하는 CAERUS를 개발하였다. CAERUS는 포화도 수준에 따라 신호주기 증가, 감소, 녹색시간 조정을 지원하며, 녹색시간 조정 시 배리어와 상충 현시 간 포화도를 고려한다. 최근 객체 인식에 대한 기술 개발이 활발해짐에 따라 기존 루프검지기보다 광범위한 영역을 검지할 수 있는 CCTV로 이동류별 수요교통량 계측이 가능해졌다. Ahn(2022)은 교통 상황에 대응 가능한 신호제어 수행을 위해 영상검지 기반 실측 데이터를 이용하여 통과교통량과 잔여교통량을 더한 신호주기 단위의 수요교통량 가공 방안을 제시하였다. 교통수요 추정 정확도를 높이기 위해 잠재 교통수요로 잔여교통량 개념을 도입하였으며, 녹색시간에서 적색시간 전환 시점에 검지영역에 존재하는 해당 이동류의 차량대수를 잔여교통량으로 처리하였다.
기존 COSMOS는 수요교통량을 포화교통류율로 나눈 CDS 기준의 실시간 신호제어로, 신호에 의한 영향을 충분히 고려하지 못한다는 한계가 있다. 또한, 신호시간 업데이트 주기별로 녹색시간을 재산정함에 따라 주기별 녹색시간 비율 변동성이 클 경우 운전자에게 혼란을 야기할 수 있다. 이와 달리 CAERUS는 통행시간 이력자료를 바탕으로 산정한 DOS(Degree of saturation)에 따라 녹색시간을 점진적으로 변화시키며 신호교차로의 소통 개선을 도모한다. 최근에는 별도의 예측 과정 없이 영상검지기를 통해 각 이동류의 실시간 수요교통량 산정이 가능해졌다. 이에 본 연구는 국내 영상검지기가 설치된 교차로를 바탕으로 기존 CAERUS의 녹색시간 조정 규칙을 세분화하고자 한다.
CAERUS: Control Algorithm for Delay Reduction Using Travel Time
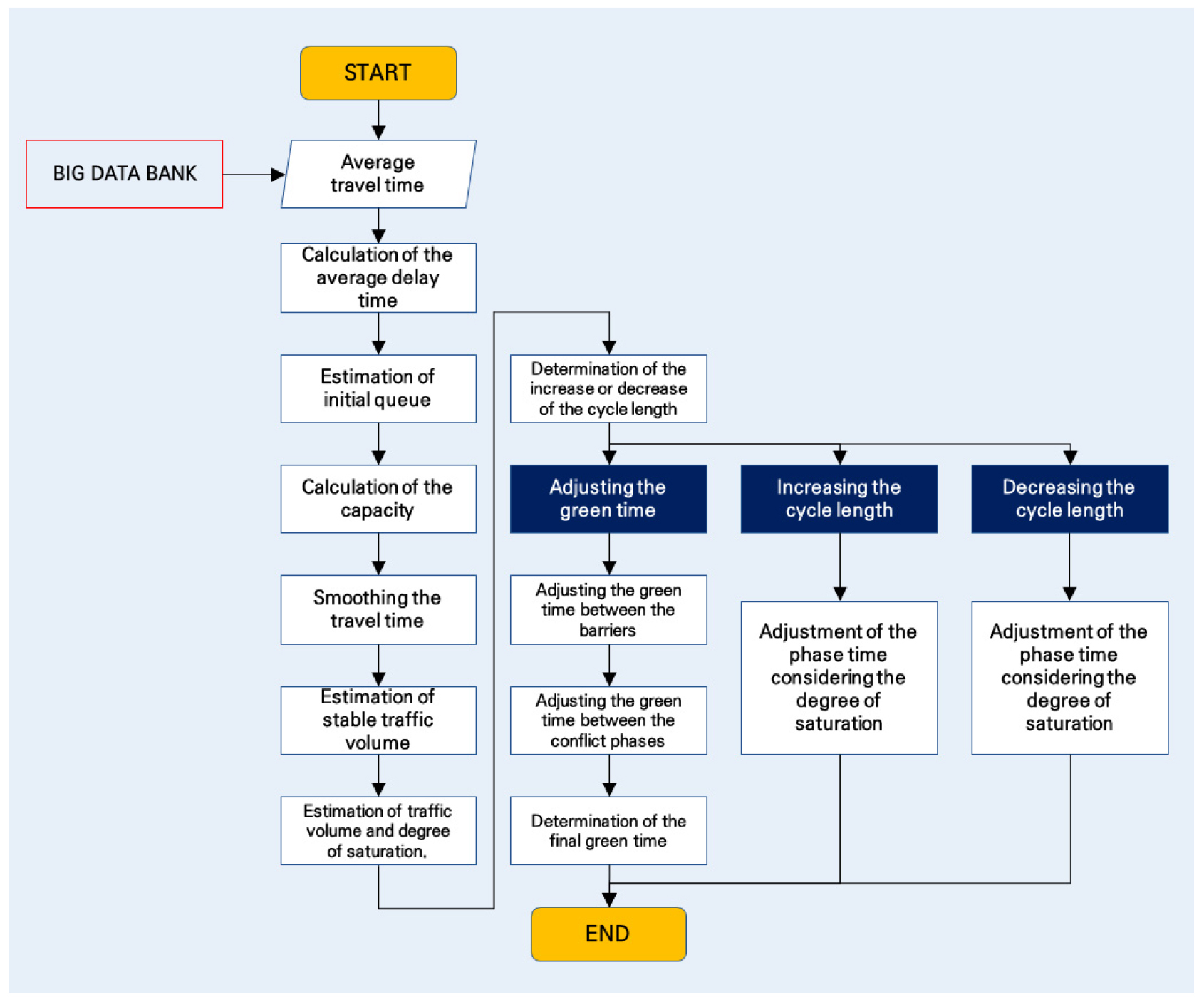
포화도 기반 신호시간 조정 알고리즘인 CAERUS의 흐름도는 Figure 1과 같다. CAERUS는 빅데이터 뱅크의 통행시간 이력자료를 이용하여 예측한 수요교통량을 바탕으로 이동류별 포화도를 추정한다. 이후 각 포화도 수준에 따라 신호주기 증가, 감소, 녹색시간 조정을 지원한다. 이때 녹색시간 조정은 배리어와 상충 현시 순으로 진행되며, 최대포화도 위치 배리어에 +1초, 포화도가 높은 상충 현시에 +1초를 부여한다.
고도화된 CAERUS: Control Algorithm for Delay Reduction Using Image Detection
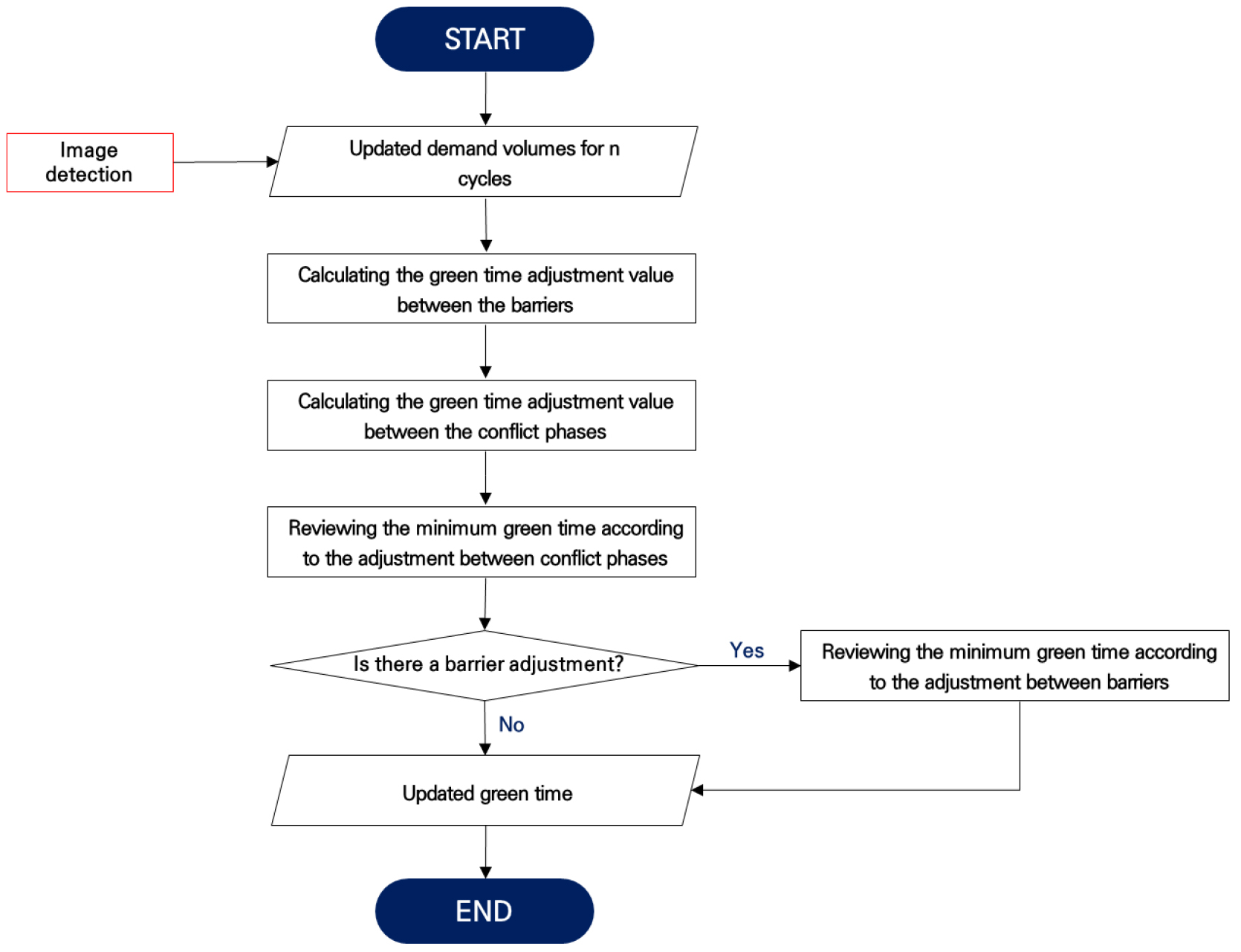
본 연구에서는 기존 CAERUS의 녹색시간 조정 규칙을 바탕으로 2가지 측면에서 고도화를 진행하였다. 첫째, 포화도 수준(state) 분할 구간을 체계화하였다. 기존 CAERUS의 포화도 수준은 경험적으로 설정한 것으로 0-0.49, 0.5-0.79, 0.8-1.0, 1.0 이상을 각각 동일한 수준으로 그룹화하였다. 본 연구에서는 Morlok(1978)의 포화도별 서비스 수준에 의거하여 0-0.44(LOS A, B), 0.45-0.84(LOS C, D), 0.85-1.0(LOS E), 1.0 이상(LOS F)을 각각 동일 포화도 수준으로 설정하였다. 둘째, 녹색시간 조정 알고리즘 내 최소녹색시간 검토 조건을 체계화하였다. 본 연구에서는 녹색시간 조정 시 두 배리어 간 최대포화도 차이가 기준값 이상인 경우에만 발생하는 배리어간 조정과 필수적으로 발생하는 상충 현시 간 조정의 최소녹색시간 검토 조건을 이분화하였다. 이에 따라 상충 현시 간 조정 시 감소 대상 현시가 최소녹색시간인 경우는 조정값을 0으로 처리하며, 배리어 간 조정 시 감소대상 현시가 최소녹색시간인 경우는 상충 현시를 대상으로 최소녹색시간을 추가 검토한다. 본 연구에서 세부화한 CAERUS의 흐름도는 Figure 2와 같이 영상검지기를 통해 특정 주기 동안 이동류별 수요교통량이 수집되면 이를 이용하여 녹색시간 조정을 수행한다. CAERUS는 포화도 균등화를 목적으로 4지 교차로 기준 8개 이동류의 개별적인 지체를 고려하여 녹색시간 조정을 수행한다.
단일링(Single-ring) 기준의 CAERUS
특정 주기 동안 수요교통량 수집이 완료되면 CAERUS가 활성화됨에 따라 배리어 간 녹색시간 조정이 실행된다. 4지 교차로 기준 각 접근로별 좌회전, 직진 8개 이동류 중 한 이동류의 포화도가 0.85 경우 배리어 간 조정이 활성화된다. 활성화는 Morlok(1978)의 불안정한 교통류 수준을 나타내는 포화도 값을 기준으로 한다. 이후 각 배리어 간 최대포화도 차이가 0.3 이상인 경우 최대포화도가 큰 배리어에 1을, 작은 배리어에 -1 값을 부여한다. 배리어 간 조정 조건은 Equations 1, 2와 같다.
where, : Degree of saturation (%), ∀
: Barrier adjustment time (sec)
상충 현시 간 녹색시간 조정 시 상충 현시 간 수준이 동일한 경우 Equation 3과 같이 녹색시간을 조정하며, 상이한 경우 Equation 4를 기반으로 한다. 상충 현시 간 녹색 시간 조정 시 감소 대상 현시가 현재 최소녹색시간인 경우 Equation 5와 같이 두 현시 조정 시간 변수()에 모두 0을 부여한다.
where, : Phase adjustment time (sec), ∀
: Current green time (sec), ∀
: Minimum green time (sec), ∀
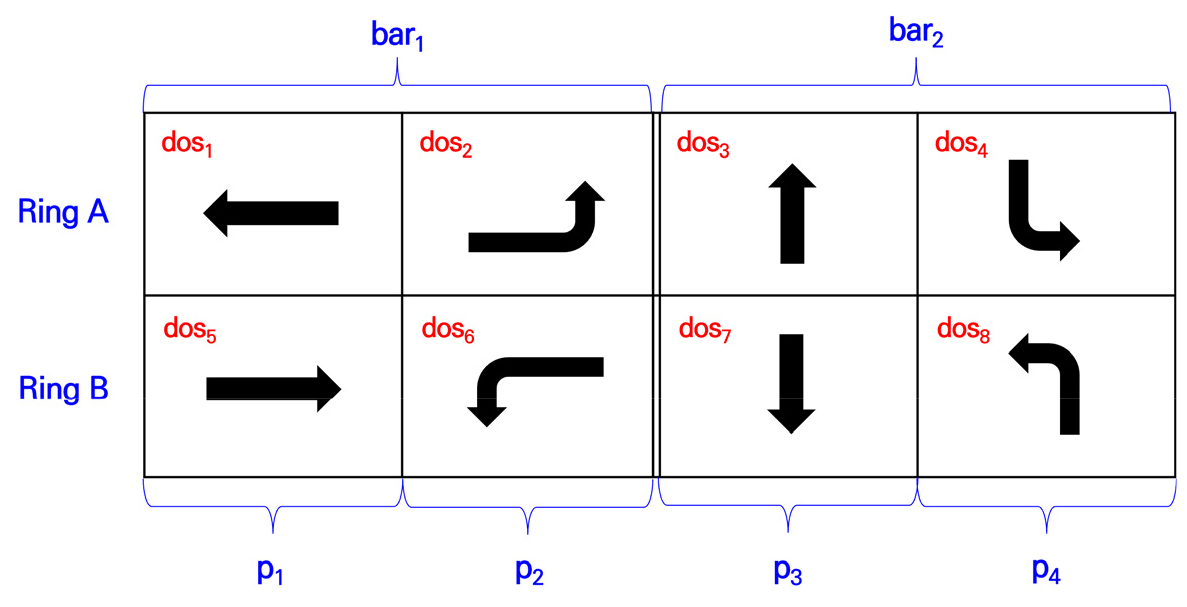
상충 현시 간 조정이 완료되면 배리어 조정 유무에 따라 현시별 최종 녹색시간이 결정된다. 두 배리어의 조정 시간(bar1, bar2)이 모두 0인 경우에는 추가 실행 없이 CAERUS가 종료되며, 배리어 조정이 있는 경우 감소 대상 배리어의 최소녹색시간 검토가 활성화된다. 이때 배리어 조정 값은 증가 대상 배리어인 경우 해당 배리어 내 최대 포화도가 위치한 현시에 +1초, 감소 대상 배리어인 경우 최소포화도가 위치한 현시에 -1초를 더한다. 배리어 조정에 따른 감소 대상 현시가 최소녹색시간 조건이 불충족될 경우 상충 현시에 -1초를 부여한다. 만약 상충 현시 또한 최소녹색시간이 충족되지 못할 경우 배리어 간 조정은 일어나지 않는다. 각 현시별 녹색시간은 CAERUS 시행 전보다 최대 2초까지 차이가 난다. CAERUS 시행 시 교차로별 사전 설정된 offset이 변화하는 것을 방지하기 위해 주도로 직진 현시를 1번 현시로 설정하였다. 주방향이 EB-WB 방향인 경우 단일링 체계에서 CAERUS의 각 현시별 이동류와 변수들은 Figure 3과 같이 형성된다.
이중링(Dual-ring) 기준의 CAERUS
이중링 체계에서 CAERUS 운영은 단일링과 유사하나 오버랩 현시가 허용됨에 따라 8개 이동류의 개별적인 포화도를 고려하여 녹색시간 조정이 실시된다. 배리어 간 조정은 각 배리어 내 최대포화도 현시를 기준으로 함에 따라 단일링과 동일하다. 각 현시 내 2개 이동류 중 더 큰 포화도를 보이는 이동류를 기준으로 상충 현시 간 녹색시간 조정이 이루어진 단일링과 달리 이중링의 경우 Equations 6, 7, 8과 같이 ring 별로 상충 현시 간 조정값이 결정된다. 이후 배리어 조정 유무에 따라 최소녹색시간을 고려한 후 최종 확정된 이동류별 녹색시간을 업데이트한다.
where, : Phase adjustment time, ∀
: Current green time, ∀
: Minimum green time, ∀
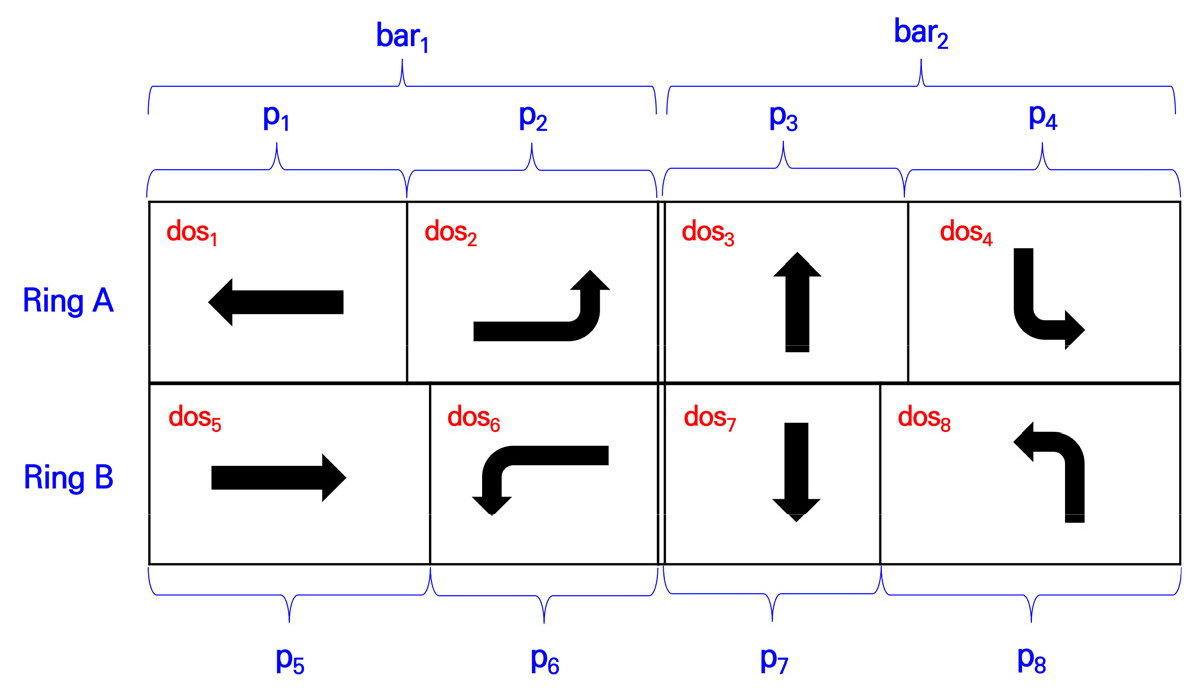
이중링의 경우 Figure 4와 같이 8개 이동류를 대상으로 CAERUS가 시행됨에 따라 각 이동류의 개별적인 지체를 고려한 효율적인 녹색시간 조정이 가능하다.
시뮬레이션 분석 및 결과
본 연구에서는 영상검지 기반 실시간 수요교통량을 이용하여 CAERUS의 효과를 평가하기 위해 영상검지기가 설치된 서울시 강남구 ‘도곡-대치’구간을 시뮬레이션으로 구축하였다. 수요교통량은 Ahn(2022)의 연구를 바탕으로 이동류별 통과교통량과 잔여교통량의 합을 30분 단위로 가공한 2021년 7월 6일 화요일 자료를 사용하였다. 도곡-대치 구간은 평일 오전 첨두시와 오후 첨두시 사이에 이동류 별로 유사한 교통량 분포를 보임에 따라 분석 시간을 현황 신호 TOD 계획을 기준으로 패턴 1(07:00-10:00), 패턴 2(10:30-13:30), 패턴 3(17:00-20:00)으로 분할하였다.
시나리오는 진입 교통량의 변동성에 따라 2가지로 구성하였다. 첫 번째 시나리오는 분석 시간 동안 진입 교통량이 일정한 경우로 패턴별 초기 30분 단위 수요교통량을 네트워크 입력값으로 사용하였다. 두 번째 시나리오에서는 수요교통량 30분 단위 이력자료를 이용하여 시뮬레이션 네트워크 상에 30분 단위로 유입되는 교통량이 변동되도록 설정하였다. 첫 번째 시나리오는 CAERUS의 포화도 균등화 진행 여부 파악을 위해서이며, 두 번째 시나리오는 변화하는 수요교통량에 따라 CAERUS가 효율적으로 신호 제어를 수행하는지 확인하기 위함이다. 분석 시 교통 시뮬레이션인 VISSIM을 이용하였으며, 초기 40분 동안 네트워크에 교통량 유입 후 분석을 진행하였다. 4지 교차로 기준 8개의 이동류만을 고려하기 위해 도곡역 교차로와 대치역 교차로의 우회전은 모두 0대로 처리하였다. CAERUS 운영 시 COM interface를 이용해 3주기 단위로 녹색시간을 업데이트하였다. 시나리오별 교차로 지체는 VISSIM에 설치된 검지기를 통해 얻었으며 이동류별 수요교통량과 포화도는 COM interface를 통해 산정하였다.
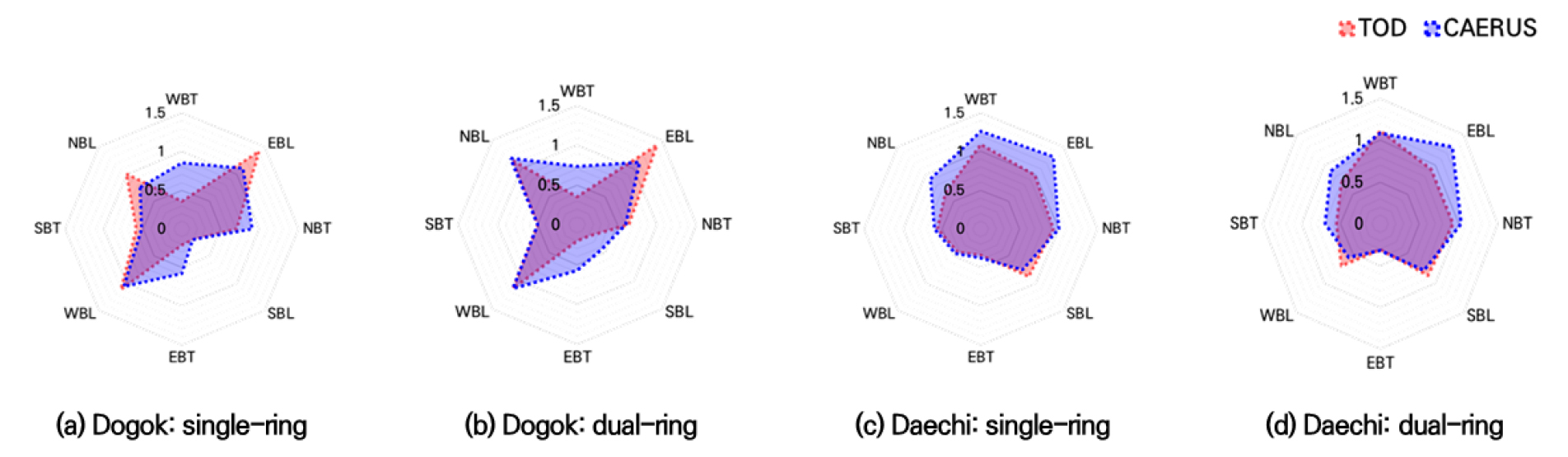
CAERUS의 포화도 균등화 수행 여부를 확인하기 위해 패턴 2에서 현시 운영 체계별 8개 이동류의 포화도를 나타낼 경우 Figure 5와 같다. 대치역과 달리 이동류별 포화도 차이가 큰 도곡역은 CAERUS 운영 시 포화도 균등화가 효율적으로 수행되었다.
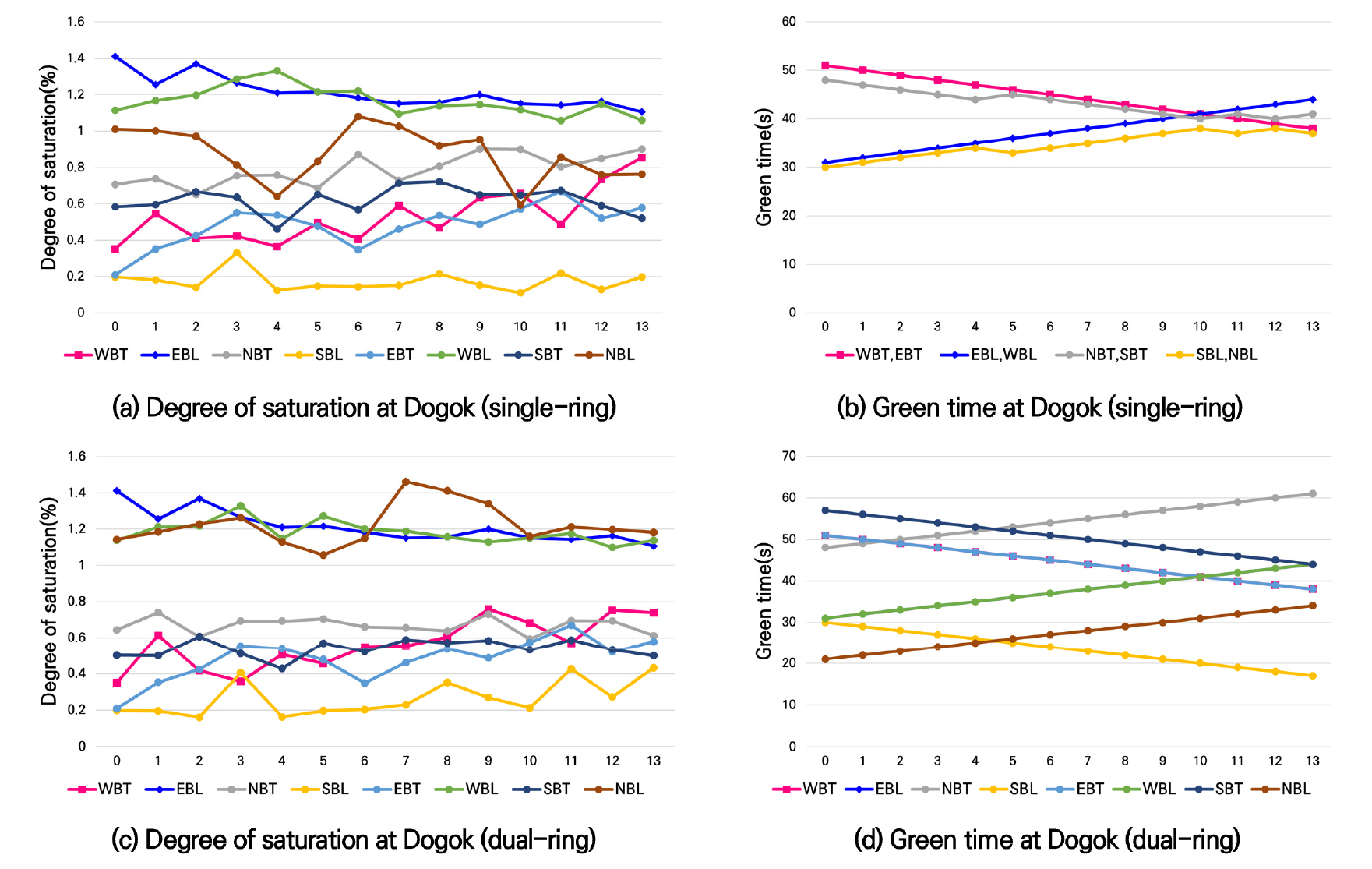
분석 시간 동안 진입 교통량이 동일한 시나리오에서 각 신호 패턴별 교차로 지체는 Table 1과 같다. 대부분의 교차로에서 TOD 운영에 비해 CAERUS 운영 시 교차로 지체가 개선되었다. 이는 CAERUS가 포화도 균등화를 목적으로 녹색시간을 조정함에 따라 이동류별 포화도 편차가 큰 교차로일수록 교차로 지체 감소 효과가 증가하였으며 유사할수록 효과가 감소하거나 지체가 소폭 증가하였다. 패턴 2의 대치역의 경우 단일링과 이중링 운영 시 모든 이동류의 포화도 단계가 유사하여 배리어 간 조정은 일어나지 않으나 패턴 1에 비해 이동류별 포화도 편차가 커 CAERUS 적용 시 교차로 소통상황이 개선되었다. 도곡역에서 단일링 체계 신호 운영 시 Figure 6(a)에서와 같이 8개 이동류 중 EBL, WBL, NBL이 전반적으로 높은 포화도를 보였다. 이에 따라 CAERUS 운영 시 Figure 6(b)에서와 같이 시간이 경과될수록 해당 이동류가 위치한 현시 시간이 증가하는 모습을 보였다. 이중링 체계에서 도곡역의 경우 또한 CAERUS 시행 시 Figure 6(c), (d)와 같이 포화도가 높은 EBL, WBL, NBL 이동류의 녹색시간이 점진적으로 증가하였다. 이와 달리 포화도가 낮은 EBT, WBT, SBL, SBT 이동류의 녹색시간은 지속적으로 감소하는 경향을 보였다.
Table 1.
Intersection delay in scenario 1
30분 단위로 수요교통량이 변동되는 경우 상충 현시 간 포화도 차이가 큰 도곡역은 Table 2에서와 같이 TOD에 비해 낮은 교차로 지체를 보였으며 포화도 차이가 작은 대치역은 교차로 지체 개선 효과가 미미하였다. 신호 TOD 패턴 3에서는 두 교차로 모두 적은 개선 효과를 보였다. 그러나 Figure 7(c)와 같이 대치역 교차로의 지체를 1시간 단위로 표출할 경우 CAERUS 운영 시 시간이 경과됨에 따라 교차로 지체가 감소하는 경향을 보임을 확인할 수 있다. 이는 Figure 7(a), (b)를 보면 교통량은 많으나 상대적으로 포화도가 낮은 NBT의 녹색시간을 교통량이 적고 포화도가 높은 SBL에 배분함에 따라 CAERUS 운영 초기에는 교차로 지체가 TOD에 비해 소폭 증가한다. 그러나 이후 Figure 7(d)에서와 같이 SBL 이동류의 지체 개선 효과가 크게 증가함에 따라 교차로 소통상황이 개선되었다.
Table 2.
Intersection delay in scenario 2

결론 및 향후연구
본 연구는 포화도 균등화를 지원하는 실시간 신호제어인 CAERUS를 영상검지 기반 실시간 수요교통량이 이용 가능한 환경에서 고도화하였다. 세부화된 CAERUS는 단일링과 이중링에서 각 이동류의 포화도 수준 경계에 따라 배리어 간 조정 여부를 판단한다. 이후 최소녹색시간을 고려하여 상충 현시를 조정한 다음 배리어 조정 유무를 고려하여 현시 시간을 최종적으로 조정한다. 교통 시뮬레이션을 이용하여 서울시 강남구 도곡-대치 구간을 대상으로 CAERUS 시행에 따른 효과를 분석하였다. 분석 결과, CAERUS 운영 시 대부분 TOD 운영에 비해 교차로 소통상황이 개선되었으며 이동류별 포화도 차이가 큰 교차로일수록 더욱 큰 교차로 지체 감소 효과를 보였다. 본 연구의 결과는 향후 국내 신호교차로에 실시간 신호제어 도입 시 활용 가능할 것으로 기대되며, 특히 이동류별 포화도 차이가 큰 교차로에 적용 시 더욱 효과적일 것으로 기대된다.
본 연구는 CAERUS가 포화도 균등화를 수행하는지 확인하기 위해 분석 시 우회전 이동류를 제외하였다. 추후 우회전 이동류의 교통량 수준에 따라 CAERUS 시행 효과를 평가할 필요가 있다. 본 연구는 분석 시 기존 CAERUS 모듈 중 녹색시간 조정만을 대상으로 고도화를 진행하였다. 따라서 향후 연구에서는 신호주기 증가, 감소에 대한 기능 개선이 요구된다. 또한, 녹색시간 조정 시 경험적으로 설정한 기준값에 대한 체계적인 연구가 필요하다.
