

서론
현 빅데이터 시대에서 교통 부문은 내비게이션 교통정보, 교통카드 데이터, 차량운행기록(DTG) 등 다양한 데이터의 수집으로 분석이 용이해졌으며, 데이터의 규모만큼이나 의미 있는 결과 도출이 가능해졌다. 데이터의 활용 가능이 용이해짐에 따라 기존 이론의 현실적인 한계를 보완하기 위한 연구가 활발히 실시되고 있다.
교통 공학은 차량의 주행 행태를 연구하는 학문으로, 과거 신호 연동에 대한 연구는 주로 이론적인 관점에서 이루어졌으며 실제 교통 상황에 적용 시 효과를 입증할 수단이 여의치 않았다. 기술이 발전됨에 따라 현대에는 실시간 데이터 수집 환경의 구축으로, 실제 차량이 그리는 주행 궤적 데이터를 통해 신호교차로 간 연동의 가시적인 확인이 가능해졌다.
기존 연동 효율 지표(Bandwidth efficiency)는 설계된 신호 시간을 바탕으로 산출된 연동폭 대 신호주기의 비율로 값을 나타냈다(Department of Transport MININESOTA, 2013). 기존 지표의 경우 대표 주행속도 하나로 연동폭의 기울기를 나타냈기 때문에 현실적 한계가 있었다. 실제 도로상에서는 차량들 간의 상충, 감속, 정지, 가속 등 다양한 주행 패턴이 존재한다. 그 결과 실제 차량의 궤적 데이터로 시공도를 나타낼 경우 기존 연동폭(bandwidth)과 실제 주 현시 직진 차량 군이 그리는 연동폭은 차이를 보였다.
과거와 달리 다양한 교통 데이터가 실시간으로 누적되고 있어 데이터 기반의 실제 연동성을 평가할 수 있는 환경이 마련되었다. 본 연구는 교통 데이터를 이용하여 도시부도로에서 발생하는 교통 혼잡 문제 중 많은 교통량으로 인해 발생한 지체가 아닌 자유 교통류 상태에서 비효율적인 신호 설계로 인해 초래된 지체 현상에 대해 분석하였다. 본론에서는 기존 연동 지표의 현실적 한계를 보완하기 위해 차량 궤적 데이터를 이용하여 실제 연동성을 평가할 수 있는 새로운 지표를 모색하였다. 분석 결과에서는 차량 궤적 시공도와 함께 새로운 지표의 값을 나타내어 설계한 지표가 실제 주행 현상을 반영함을 확인했다. 또한 신호 최적화 프로그램인 KS-Signal로 산출한 기존 연동 지표와의 비교, 실제 신호 시간과의 일치를 통해 본 신호 연동 평가 방법론의 타당성을 확보하였다.
기존 문헌 고찰
연동폭은 차량이 특정 주행 속도로 시스템을 통과하는데 사용가능한 시간으로(U.S. Department of Transportation Federal Highway Administration, 2008), 교통 분야에서는 효율적인 신호 체계를 구축하기 위해 연동폭 최적화를 주제로 다양한 연구를 진행해왔다.
신호 연동 분야에서 Brooks(1965)는 간섭 최소화를 통한 연동폭 최적화를 알고리즘을 구축함으로서 최적의 오프셋과 시공도를 설계하였다. Brooks의 연동폭 최적화 알고리즘은 연동폭 최대화 시뮬레이션인 PASSER Ⅱ에 사용되었으나, 2현시 체계에서 현시 수가 증가할 경우 연동폭 최대화를 보장할 수 없다는 한계가 있다(Zong and Thomas, 2007). John et al.(1981)은 혼합 정수 선형 계획법으로 간선도로 최적화 모형인 MAXBAND를 설계하였다. MAXBAND는 양방향 연동폭 최대화를 목적으로 한 제약식을 통해 최적의 해를 산출한다. 산출된 해는 신호주기와 설계속도, 최적의 현시 순서를 결정하고 적색 시간에 누적된 대기행렬의 소거를 가능하게 한다. Gartner et al.(1991)는 기존 연동폭 모형이 실제 간선도로 상의 교통류를 반영하지 못하는 한계를 보완하여 MULTIBAND를 설계하였다. MULTIBAND는 방향별 연동폭을 개별적으로 정의하여 교통류 패턴에 따라 연동폭 진행 방식을 조정할 수 있다. Mc Trans Center University of Florida(2004)에서는 연동폭 최대화가 아닌 지체 최소화를 목적으로 신호를 설계하는 TRANSYT-7F 프로그램을 개발하였다. TRANSYT-7F는 차량이 녹색시간에 교차로 그룹을 연속 진행할 수 있는 기회인 PROS(Progression opportunities)를 이용해 신호를 최적화한다. PROS는 차량이 정지하지 않고 하류부 교차로를 통과할 수 있는 시간을 계산하여 값이 최대가 되는 신호 체계를 최적 해로 채택한다.
현대에 들어와 새로운 기술의 등장과 대중교통 중심으로 패러다임이 전환됨에 따라 기존 전통적인 차량 중심의 신호 이론에서 벗어나 연구의 범위가 확장되었다. Jeong and Kim(2009)은 교통신호제어 제반기술 발달에 따른 운영 및 제어방법 개선을 목적으로 교통정보 수집장치로부터 수집되는 개별차량 구간통행시간정보를 이용하여 실시간 신호제어 알고리즘을 개발하였다. 신호제어 변수 중 오프셋은 도시부의 점진적인 신호시간 변화 반영을 위해 사전에 정의된 오프셋 자료를 적용하였으며 주기 및 현시 산정 이후 현장 튜닝을 통해 사전에 작성해둔 오프셋 자료에 적용하였다. Lee and Kim(2009)는 정보통신 발달에 따른 신호제어전략 개발의 필요성을 강조하며 무선통신 환경에서의 개별차량 감응식 신호제어 알고리즘을 개발하였다. 저포화 상태와 근포화 상태의 V/C에 따른 알고리즘 분석 결과 저포화 상태와 근포화 상태에서 모두 링크지체와 링크속도가 정주기식 운영과 감응식 운영 보다 제어효과가 높은 것으로 나타났다. Jeong et al.(2011)은 전통적인 연동폭 최대화 모형인 MAXBAND의 개념을 활용하여 간선도로에서 트램이 일반차량과 함께 운영되는 경우를 고려한 트램 연동 모형을 개발하였다. 대중교통이 일반차량 대비 낮은 속도와 정류장 정차시간으로 인해 승용차의 연동폭을 이용하지 못하는 단점을 보완하여 일반차량과 트램 모두를 연동시켜 이중화된 연동폭을 표현할 수 있도록 하였다. Han and Kim(2012)은 실제 도로 주행 시 운전자의 만족도를 고려하여 지체시간과 연동성을 동시에 고려한 시뮬레이션 모형을 개발하였다. 교통량 수준과 정지선 대기 차량을 고려하여 밀도-교통량 곡선을 이용한 충격파 모형을 적용하였으며 Cell Transmission Model을 차용하여 지체시간과 연동 지표를 개발하였다. Lee et al.(2014)는 차세대 지능형교통체계 변화 과정에서 지점검지체계에 국한되어있는 현 교통정보 수집방법의 한계점을 개선하였다. Hi-pass에 적용된 DSRC 기술을 통해 수집 가능한 구간정보를 이용하여 접근로의 대기행렬 길이를 산정하였으며 이를 활용하여 독립교차로의 실시간 신호제어모형을 개발하였다. Lee and Kim(2014)는 도심 혼잡증가와 친환경 대중교통의 해결책으로 트램이 언급되는 시점에서 트램과 일반차량의 효과적인 운영을 위한 신호 최적화 모형을 개발하였다. 간선도로 신호 연동화 모형인 KS-SIGNAL 모형을 기초로 트램의 통행특성과 트램 전용차로 시스템의 특성을 반영한 KS-SIGNAL Tram모형을 개발하였으며 트램차량의 최소 연동폭을 확보하여 고정식 기반의 트램 우선신호를 구현하였다. 또한 동시에 일반 이동류의 신호교차로의 대기시간을 최소화하는 신호시간을 산출하였다.
현재까지 여러 교통류 패턴을 반영한 새로운 연동 모델을 개발하기 위해 끊임없는 연구가 실시되었지만 설계된 연동폭을 평가하는 방법론에 대한 연구는 많지 않았다. 새로운 모델을 개발하는 것도 중요하지만 개발된 모델의 정확성, 효율성 등의 효과를 입증할 척도 또한 필요하다. 기존 연구는 연동폭의 효과 검증 시 신호주기 대비 연동폭의 크기인 연동 효율 지표(Roger et al., 2011)를 사용하였다. 해당 지표는 연동폭 최대화 시뮬레이션인 PASSERⅡ의 효과 척도로 0%에서 100% 사이에 값을 나타내며 100에 가까울수록 더욱 많은 차량들의 연속 진행이 가능하다(Texas Transportation Institute Transportation Operations Group, 2004). 하지만 기존 연동 효율 지표는 교차로 간 거리, 대표 주행속도 하나로 산출된 오프셋을 이용해 설계한 신호 시간으로 결과값을 표출하기 때문에 실제 차량들의 주행 패턴을 고려하지 못하는 한계가 있다. 과거와 달리 현 빅데이터 시대에서는 체계적인 데이터의 수집이 가능해졌으므로 기존 연동 효율 지표가 실제 교통류 상황을 반영할 수 있도록 수정하는 과정이 필요할 것으로 판단된다.
새로운 연동 효율 지표 설계
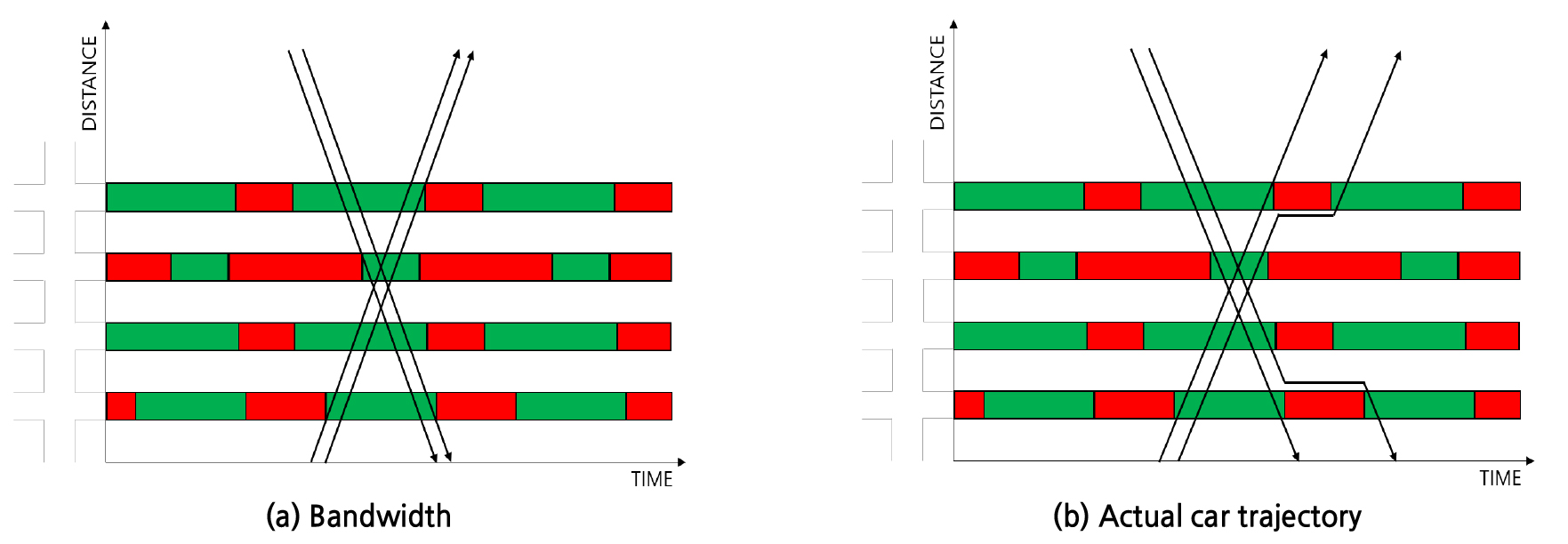
기존 연동 효율 지표는 연동폭을 신호주기로 나눈 값을 Figure 1(a)와 같이 주 현시에서 차량 군이 지체 없이 일정한 속도로 진행한다는 가정 하에 계산하였다. 하지만 실제 교통 상황에서는 많은 교차로와 그에 따른 빈번한 지체 발생 등 여러 제약 조건이 있다. 그 결과 도로상에서는 Figure 1(b)와 같이 이론적인 연동폭보다 기울기가 완만하거나 정지 패턴을 보이는 등 다양한 차량의 주행 행태를 볼 수 있다. 따라서 본 연구는 새로운 연동 효율 지표 설계 시 Figure 1(b)를 바탕으로 실제 교통류 상에서 발생하는 여러 주행 패턴을 고려하였다.
본 연구는 기존 연동 효율 지표의 현실성을 보완하기 위해 개별 차량 속도와 차량 당 정지 횟수 반영을 중점으로 새로운 지표를 설계하였다. 개별 차량 속도는 서울시에서 시행 중인 안전속도 5030 정책을 고려하여 도시 내 일반 도로의 제한속도인 50(km/hr)(Korean National Police Agency, Ministry of Land, Infrastructure and Transport, 2019)에 가까울수록 연동 효율이 좋다고 판단하였다. 충분한 데이터 확보를 위해 분석 대상지를 주 간선도로로 하였으나, 주 간선도로는 도시 내 일반 도로 중 이동성 위계가 가장 높아 항상 수요가 존재한다. 따라서 교통량이 거의 없는 상태에서 다른 차량의 영향을 받지 않고 차량이 낼 수 있는 자유속도(Ministry of Land, Transport and Maritime Affairs, 2013)는 본 연구의 분석 대상지에서 현실적으로 내기 어려울 것으로 판단하였다. 이에 따라 본 연구에서는 개별 차량 속도가 자유속도가 아닌 도로의 기하구조와 소통 상황을 함께 고려한 제한 속도에 가까울수록 연동 효율 값이 커지도록 지표에 반영하였다.
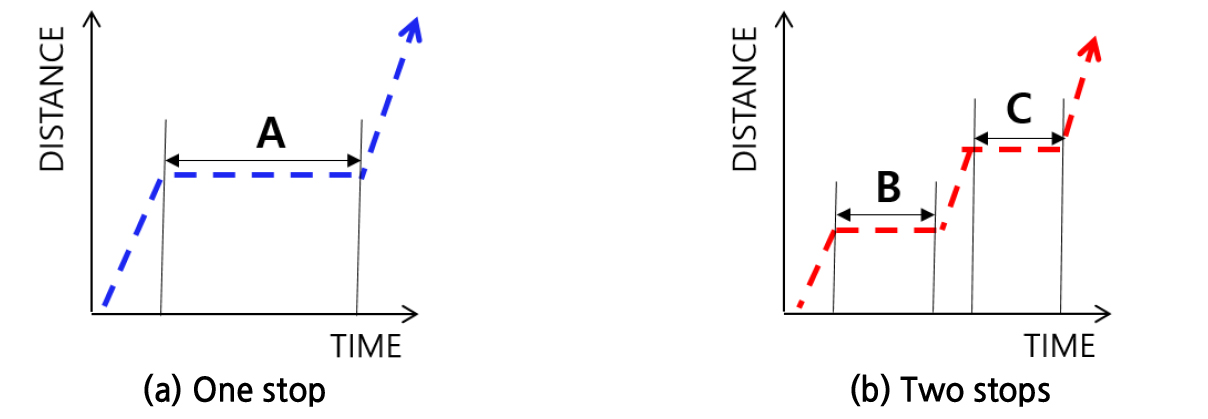
새로운 연동 효율 지표는 TRANSYT-7F의 PROS(Progression opportunities)의 모델을 차용하여 한 주기 동안 차량의 정지 횟수가 적을수록 연동 효율이 높다 평가하였다(Mc Trans Center University of Florida, 2004). 다시 말해 Figure 2(a)와 Figure 2(b)가 동일한 정지 지체를 경험하였다 하더라도 Figure 2(b)와 같이 정지 횟수가 더 많을 경우 이에 가중치를 두었다.
Equation 1은 기존 연동 효율 지표의 한계를 보완하여 설계한 새로운 한 방향 연동 효율 지표이다. Vk는 k번째 차량의 공간평균속도로, 산출 시 이상적인 차량 속도를 사용하는 기존 연동 효율 지표와 달리 현실적인 결과값을 얻기 위해 실제 차량의 공간평균속도를 지표 계산 시 사용하였다. Sk는 k번째 차량이 분석 교차로 그룹 진행 시 정지한 횟수로, 정지 현상이 빈번할수록 본 지표의 값은 작아진다. 정지 신호에 의한 대기 시 대기 행렬 내의 미세한 움직임을 고려하여 정지 기준을 3(km/hr)로 설정하였으며, 3(km/hr)로 6초 이상 주행 시 차량의 상태를 정지로 판단하였다. 신호 교차로의 수가 I개 일 때 신호에 의한 차량 정지는 최대 I번이므로 신호로 인한 정지까지는 양수로 두기 위해 교차로 개수에 1을 더하였다. I에 1을 더하지 않을 경우 모든 교차로에서 적색 신호로 진행 차량이 정지한다면 분자가 0이 되어 지표 값이 0으로 산출된다. 모든 신호 교차로에서 정지 현상을 경험하는 것은 크게 적색 시간 시작 혹은 중간에 교차로에 도착한 경우와 녹색 시간 직전 적색 시간에 교차로 도착한 경우로 분류될 수 있으며 이는 속도 측면에서 차이를 보인다. 이러한 신호 시간에 따른 속도 차이를 지표에 반영하기 위해 I에 1을 더하여 지표가 0으로 산출되는 것을 방지하였다. ‘(I + 1) - Sk’의 값이 양수가 아닐 경우 이는 신호 교차로의 영향과 더불어 많은 교통량으로 인해 초래된 값이므로 자유 교통류 상태에서 신호의 영향만을 고려하는 본 연구의 분석 범위를 벗어난다.
where, N : Number of vehicles on the sub area
I : Number of intersections on the sub area
P.S : Posted speed(km/hr)
Sk : Number of stops on the kth vehicle
Vk : kth vehicle space mean speed
본 연구는 기존 운영 중인 신호 시간 패턴을 평가하여 개선 필요 여부를 판단하기 위한 목적으로 새로운 연동 효율 지표를 설계하였다. 이에 따라 본 지표는 설계된 오프셋과 운영 중인 신호 TOD를 바탕으로 실제 차량이 그리는 궤적을 통해 현황 신호의 연동 효율을 평가한다.
분석 과정
교통류는 Table 1과 같이 자유 교통류, 근포화, 과포화 등의 범주로 나뉜다. 본 연구는 자유 교통류 상태일 때를 연구 범위로 하여 차량 궤적 데이터를 이용해 교차로 그룹 내 실제 연동성을 평가한다. 따라서 본 연구는 차량 궤적 그래프와 연동 효율 지표를 통해 교통량이 적음에도 불구하고 신호로 인해 불필요한 정지 패턴을 보이는 교차로 그룹을 찾는 것을 목적으로 한다.
Table 1.
Definition of traffic flow conditions
| Category | System objectives |
| Free flow | Minimize number of stops |
| Saturated | Minimize delay |
| Oversaturated | Maximize vehicle throughput |
본 연구 분석 시 활용한 데이터는 Table 2와 같다. 서울 교통정보센터에서 제공하는 차량(택시) 궤적 데이터는 새로운 연동 효율 지표 값의 산출, 시공도 표출 시 사용하였다. 또한 차량 궤적이 실제 신호 시간과 일치함을 검증하기 위해 서울 교통 운영과에서 제공하는 신호 TOD 패턴 데이터를 이용하여 신호 시간과 녹색시간 분할을, 서울 지방경찰청에서 제공하는 신호 이벤트 데이터를 통해 오프셋 전이 시간을 파악하였다.
Table 2.
Analysis data
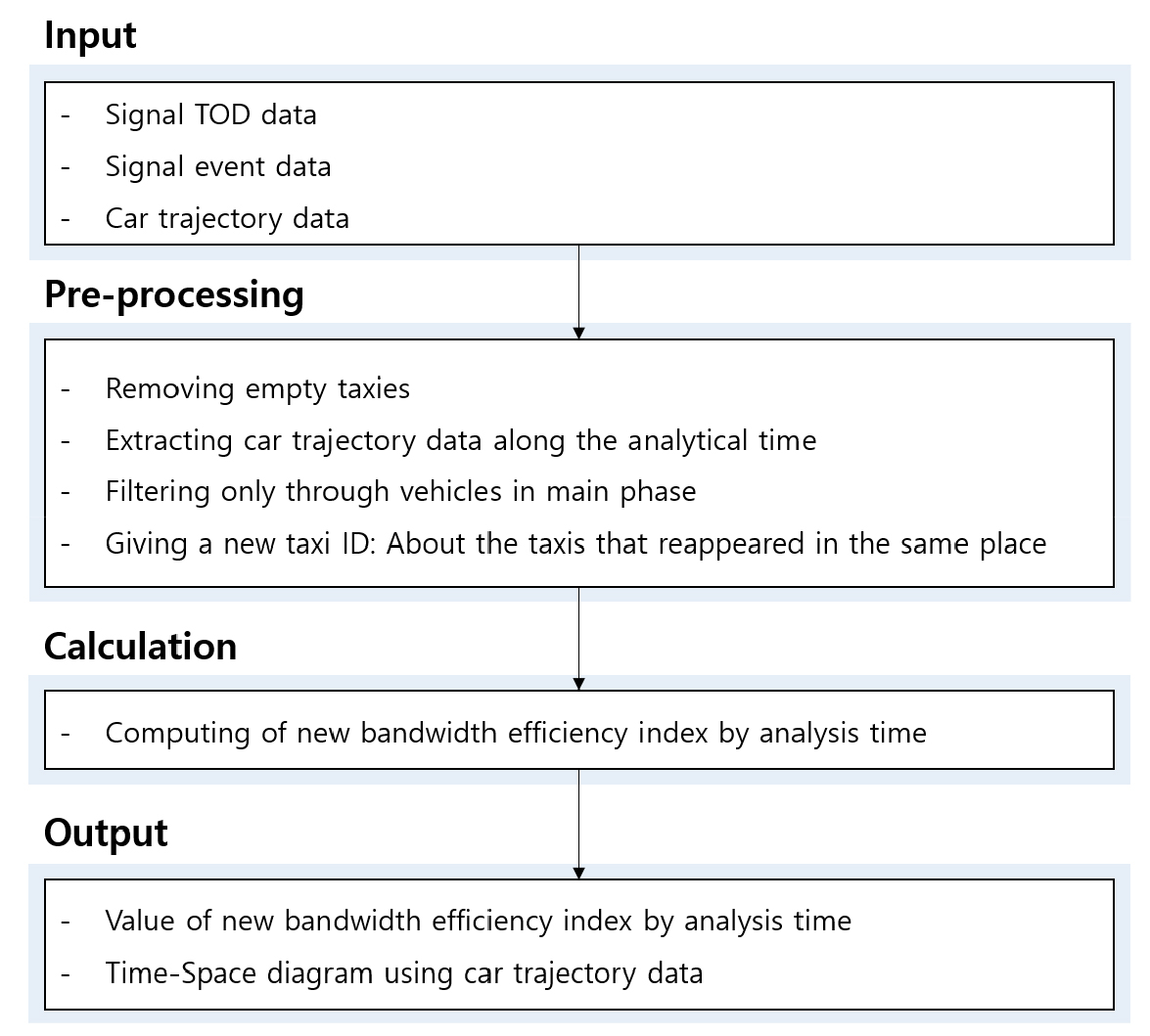
본 연구의 분석 대상지는 강남대로의 SA801G로 신사역(4지교차로), 전기공제회관(단일로), 전기공제회관 연등(단일로), 논현역(4지교차로) 등 총 4개의 교차로로 이루어진 교차로 그룹(Sub area)이다. 분석 시 일반적인 교통 상황을 다루기 위해 공휴일이 포함되지 않은 2020년 1월 28일부터 2020년 1월 31일을 시간적 범위로 정하였다. 분석 시간대는 신호 TOD 패턴과 교통량 데이터의 분포를 고려하여 새벽(01:00-05:00), 오전 첨두(07:00-08:00), 낮(14:00-16:30), 오후 첨두(18:00-20:00)로, 총 4개의 시간대로 분할하였다. 분석 시간별 주 현시 직진 차량 군의 새로운 연동 효율을 계산해내는 과정은 Figure 3과 같다. 녹색시간을 표출을 위한 신호 TOD 데이터와 신호 이벤트 데이터, 연동 효율 계산을 위한 차량 궤적 데이터를 입력 데이터로 사용하였다(Input 기능). 일반 차량과는 다른 주행 특성을 보이는 공차 택시는 제거한 뒤 주 현시 직진 차량만을 추출하였다. 오프셋 전이 시간을 확인을 위한 신호 이벤트 데이터와 시공도 표출을 위한 차량 궤적 데이터를 분석 시간별로 추출하였다. 택시는 특성상 같은 장소에 다시 나타날 수 있으므로 동일한 분석시간대에 GPS 시간 간격이 200초 이상일 경우 새로운 택시ID를 부여하여 기존 ID와 이원화하였다(Pre-processing 기능). 전처리가 완료된 차량 궤적 데이터를 이용하여 택시ID별로 연동 효율을 계산하였다(Calculation 기능). 분석 시간대별 방향별로 개별적인 연동 효율을 평균한 연동 효율 값과 시공도를 함께 표출하였다(Output 기능).
분석 결과
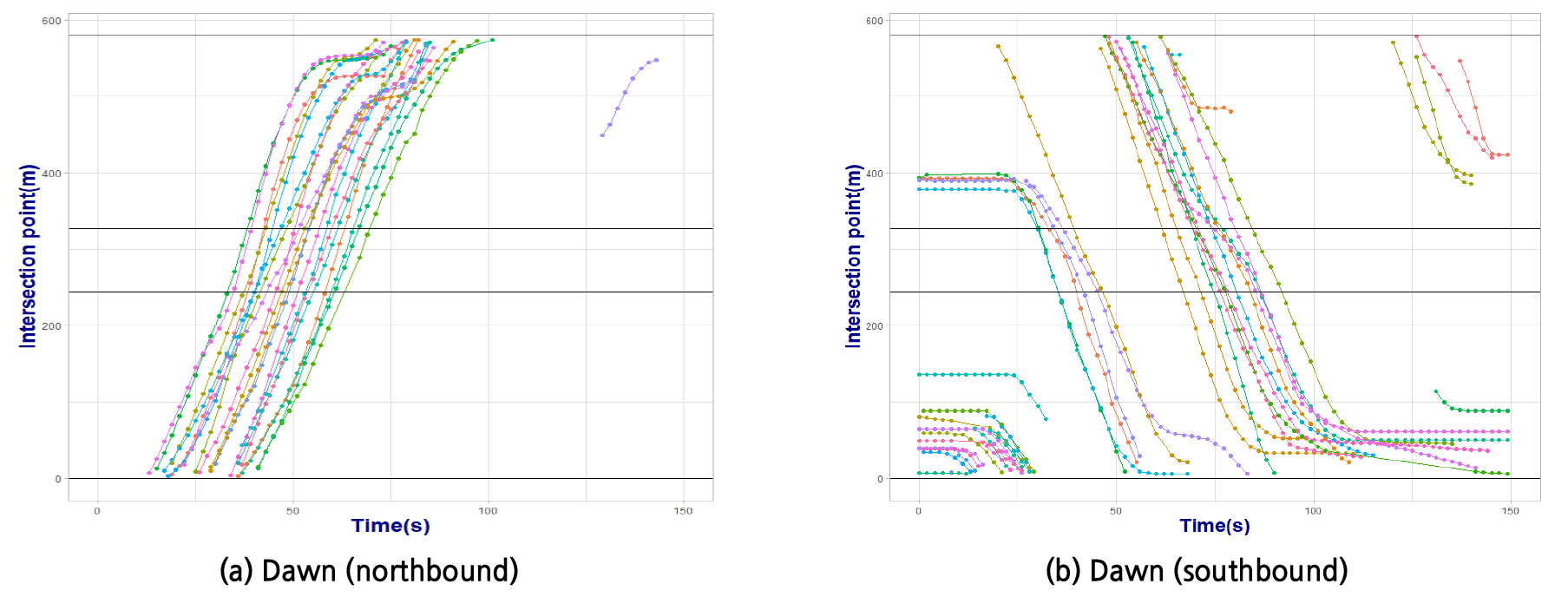
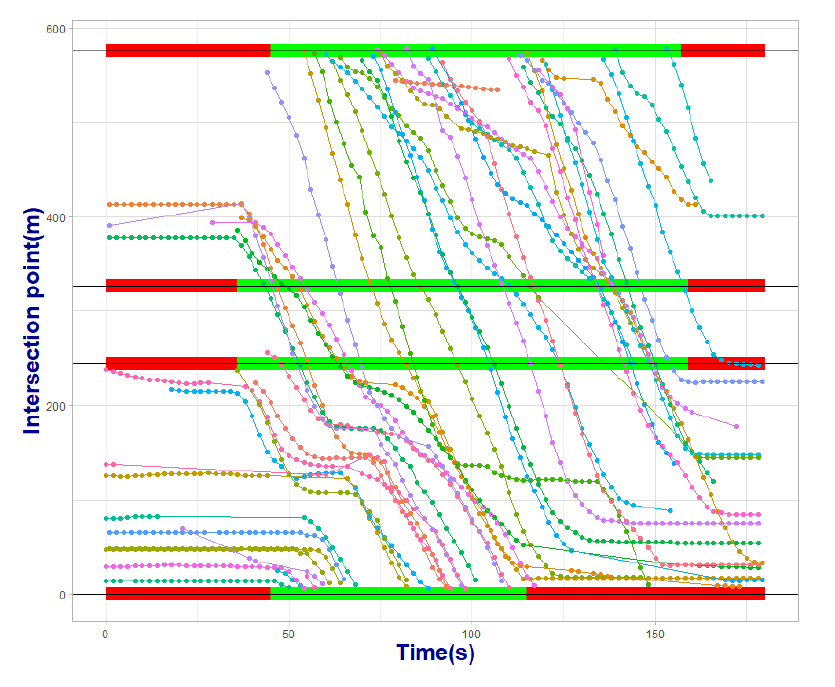
차량 궤적 데이터를 이용하여 분석 시간별로 새로운 연동 효율 지표의 값을 산출한 결과, 본 연구의 분석 범위인 자유 교통류 상태에 해당하는 새벽 시간대의 경우 북행 0.70, 남행 0.44값을 얻었다. 새로운 연동 효율 지표가 실제 주행 차량의 감 ‧ 가속 및 정지 등의 행태를 반영하는지 확인하기 위해 4일치의 차량 궤적 데이터를 시공도 상에 누적시켜 동일한 시간대의 신호주기 단위로 잘라 Figure 4와 같이 나타내었다. Figure 4에서 X축은 시간(초), Y축은 거리(m), 검은 수평선은 교차로의 위치를 의미한다. 새벽 시간대 북행 방향은 Figure 4(a)와 같이 모든 차량들이 한 번에 교차로 그룹은 통과하면서 분석 시간대 중 가장 높은 연동 효율 값을 보였다. 새벽 남행의 경우 Figure 4(b)와 같이 정지 패턴을 보임에 따라 새벽 북행보다 지표의 값이 낮게 산출되었다. 따라서 본 연구에서 설계한 새로운 연동 효율 지표가 속도 변화와 정지 패턴 등 실제 차량의 개별적인 주행 현상을 반영한 결과값을 도출함을 알 수 있다.
차량 궤적이 실제 신호 시간과 일치함을 확인하기 위해 서울 교통운영과에서 제공하는 신호 TOD 자료와 서울지방경찰청의 신호 이벤트 자료를 이용하여 신호 시간을 파악한 뒤 Figure 5와 같이 동일한 시공도 상에 차량 궤적과 함께 표출하였다. 하지만 본 연구는 신호 데이터 없이 차량 궤적 데이터만으로 연동 효율을 평가할 수 있음에 초점을 두었으므로 시공도 표출 시 신호 시간 데이터는 제외하였다.
새로운 지표의 평가 기준을 마련하기 위해 교차로 수를 4개, 제한속도를 50(km/hr)로 고정한 뒤 정지 횟수 대 교차로 수 비율에 따라 평가 기준을 마련하였다. 교차로 간 거리(Di, i+1)를 200m, 300m, 400m로 설정하여 값을 산출하였으며, 정지 지체는 본 연구에서 설정한 최소 정지 기준에 따라 1회 정지 당 6(sec/veh)씩 값을 증가시켜 공간평균속도를 계산하였다. Equation 2는 위 가정 사항에 따른 공간평균속도(Vk) 산출 방법이다. 전체 교차로 수에 대한 정지 횟수 비율에 따라 마련한 평가 기준은 Table 3과 같다. 연동 현시에 모든 교차로에서 정지 없이 제한속도에 가까운 속도를 내며 차량이 진행할 경우 가장 연동 효율이 좋다 판단하였다. 반면 모든 교차로에서 정지를 경험하여 지표의 값이 0에 가깝게 수렴할수록 연동 효율과 주행 상태가 좋지 못하다 판단하였다. 오프셋 기준으로 연동 효율을 계산하는 기존 연동 효율 지표의 평가 기준(Chang and Messer, 1991)은 Table 4와 같다.
where, Di, i+1 : Distance between Ii and Ii+1 intersections(m), the values Di, i+1 = 200, 300, 400 were used
P.S : Posted speed(m/s)
S.D : Stopped time delay(sec/veh), the values S.D = 0, 6, 12, 18, 24 were used
Table 3.
Guidelines for new bandwidth efficiency
Table 4.
Guidelines for existing bandwidth efficiency
| Existing bandwidth efficiency: PASSER Ⅱ assessment | Efficiency range |
| Great progression | 0.37-1.00 |
| Good progression | 0.25-0.36 |
| Fair progression | 0.13-0.24 |
| Poor progression | 0.00-0.12 |
새로운 연동 효율 지표가 기존 연동 지표의 현실적 한계를 보완했음을 검증하기 위해 신호 시간 최적화 프로그램인 KS-Signal을 이용하여 기존 연동 효율 지표의 값을 구하였다. 이후 본 연구에서 설계한 새로운 지표와 함께 Table 5와 같이 나타내었다. 오전, 오후 첨두의 경우 교통량이 집중될 여지가 있으므로 본 연구의 분석 범위인 자유 교통량 상태에서 신호에 의한 영향만을 고려하기 위해 새벽 시간대 결과에 초점을 맞추어 검증을 실시하였다.
Table 5.
Comparison of new bandwidth efficiency index and existing bandwidth efficiency index
| Analytical time (progress direction) | New bandwidth efficiency | Exisiting bandwidth efficiency |
| Dawn (northbound) | 0.70 | 0.29 |
| Dawn (southbound) | 0.44 | 0.16 |
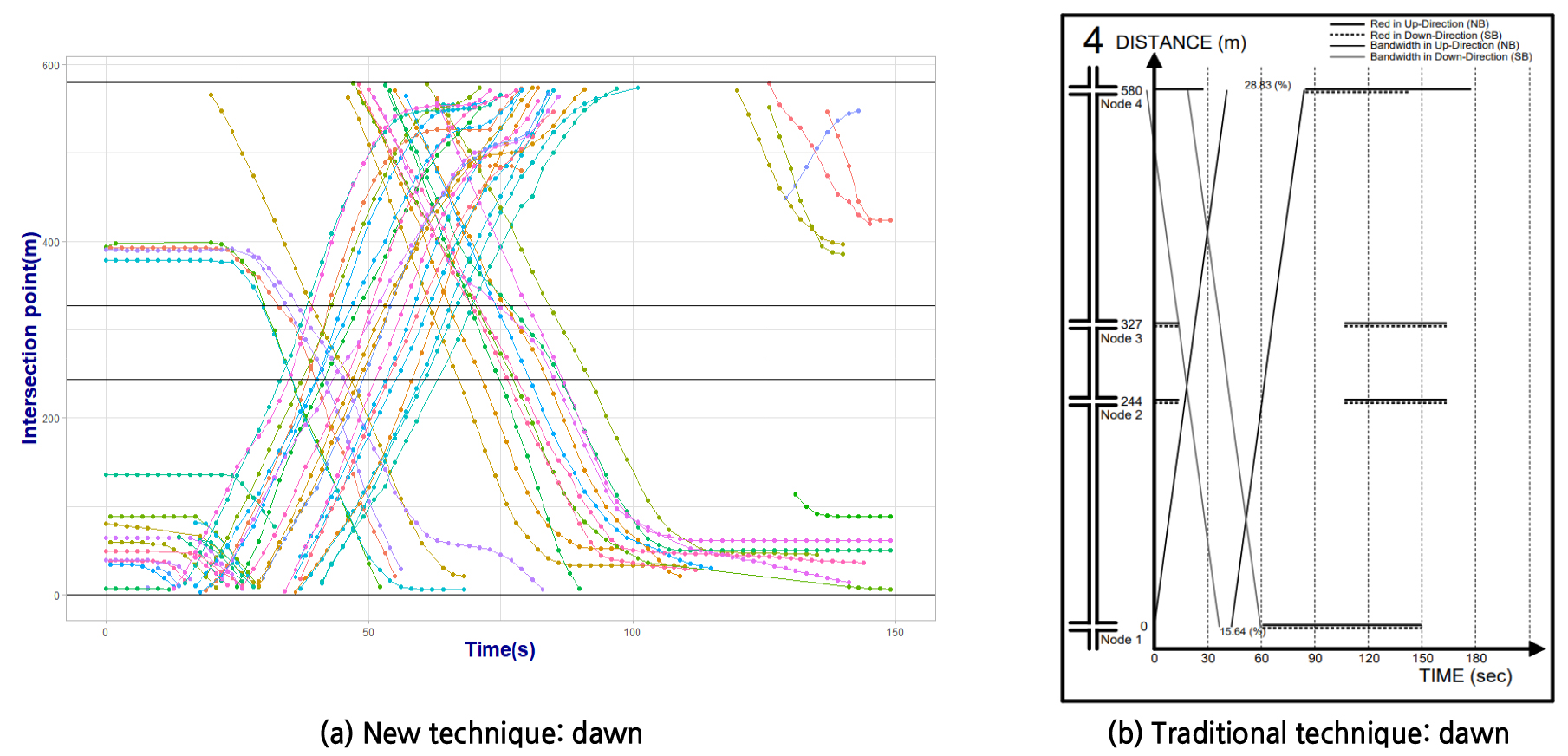
새벽 북행의 경우 차량 궤적 시공도를 Figure 6(a)와 같이 나타낸 결과, 차량 군이 높은 속도로 한 번에 교차로 그룹을 통과하는 양상을 보였다. 이에 따라 개별 차량들의 속도를 반영하는 본 연구의 지표 값은 0.70로, 매우 좋은 신호 연동을 의미한다. 기존 연동 효율 지표는 0.29로, 좋은 연동을 나타냈다. 전통적인 기법에 따라 연동폭을 나타낸 Figure 6(b)를 통해 실제 차량의 주행 궤적과 연동폭이 어느 정도 일치함을 알 수 있다. 이는 효율적인 신호 운영으로 실제 차량군이 신호에 의한 지체 없이 교차로 그룹을 진행함에 따라 Figure 6(a)의 기울기가 Figure 6(b)의 기울기와 유사한 형태를 보였기 때문이다.
새벽 북행과 달리 새벽 남행은 Figure 6(a)와 같이 대부분의 차량이 교차로 그룹 진행 시 한 번씩 정지 현상을 경험하였다. 이를 반영하여 본 지표의 값은 정지를 경험하지 않는 새벽 북행에 비해 값이 감소한 0.44로, 전체 교차로 중 25%에 정지했음을 나타냈다. 다시 말해 남행 방향으로 교차로 그룹 진행 시 본 연구의 분석 교차로인 총 4개의 교차로 중 1개의 교차로에 정지했음을 의미하며 이는 Figure 6(a)의 그래프의 결과와 일치한다. 정주기식 신호 패턴을 기반으로 산출된 기존 연동 효율 지표의 값은 Figure 6(b)와 같이 0.16으로 연동폭이 그려진다. 연동폭 산출 시 실제 차량의 속도가 아닌 이론상의 속도를 반영한 기존 연동 효율 지표의 평가 기준은 어느 정도 연동이 좋은 상태를 의미했다. 하지만 실제 데이터를 기반으로 나타낸 차량 궤적 시공도에서는 자유 교통류 상태임에도 불구하고 신호에 의해 대부분의 차량이 남행 기준 하류부 교차로에서 정지하면서 연동폭이 나타나지 않았다. 따라서 기존 연동 효율 지표는 이론상의 연동폭을 바탕으로 산출한 결과를 표출하기 때문에 다소 현실성이 떨어질 우려가 있다.
차량 궤적 시공도와 함께 새로운 연동 효율 지표 값을 나타낸 결과 본 연구의 지표는 자유 교통류 상태에서 차량들의 개별적인 주행 행태 변화에 민감하게 반응하며 결과 값을 도출함을 확인하였다. 또한 기존 연동 효율 지표와의 비교를 통해 새로운 연동 효율 지표가 기존 이론의 한계점인 현실성을 보완하였음을 검증하였다. 따라서 본 연구에서 제시한 방법론인 새로운 연동 효율 지표와 차량 궤적 시공도를 함께 이용할 경우 실제 운영 중인 신호 시스템에 따라 주현시 차량 군이 그리는 연동폭을 현실적으로 평가할 수 있을 것으로 기대된다. 또한 지표의 값이 낮게 산출될 경우 기존 신호 TOD 검증 및 개선을 위한 근거자료로써 활용이 가능할 것으로 기대된다.
토의 및 제언
본 연구는 몇 가지 제한사항을 통해 방법론을 설계하였으므로 본 방법론의 향후 활용성에 대해 추가적인 논의가 필요하다. 첫째, 본 연구는 근포화, 과포화 등의 교통 상황을 제외한 자유 교통류 상황에 한정하여 방법론을 설계하였다. 이에 따라 교통량이 많을 경우 빈번한 정지 현상의 발생으로 새로운 연동 효율 지표의 값이 0 혹은 음수로 산출될 수 있으며 이는 본 분석에서 설정한 평가 범위를 벗어난다. 실제 간선도로는 첨두시 높은 수요로 포화 특성이 자주 확인되며 도로 이용자가 많은 상태에서 비효율적으로 신호가 운영될 경우 이는 더 극심한 지체를 야기할 우려가 있다.
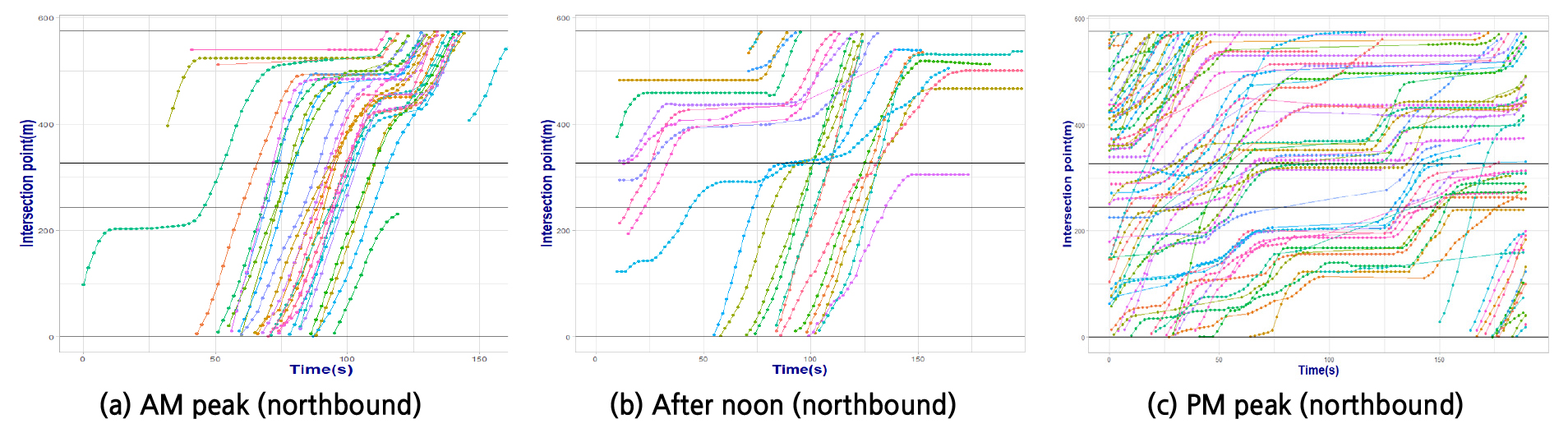
자유 교통류 상태가 아닌 분석 시간대에서 새로운 연동 효율 지표 값을 산출한 결과 오전 첨두 북행 0.53, 낮 북행 0.23, 오후 첨두 북행 0.14의 값을 얻었다. Figure 7(a)와 같이 교통량이 많은 오전 첨두일지라도 신호 연동이 좋을 경우 차량의 정지 횟수가 적어짐에 따라 지표 값이 높게 산출된다. 낮 북행인 Figure 7(b)의 경우 일부 차량은 교차로 그룹을 정지 없이 연속 진행하였으나 대부분의 차량들이 정지 현상을 경험하여 지표 값이 낮게 산출되었으므로 운영 중인 신호 TOD를 확인해볼 필요가 있다. 오후 첨두 북행의 경우 가장 낮은 지표의 값을 얻었으며 Figure 7(c)에서 볼 수 있듯이 모든 차량이 장시간의 정지로 낮은 속도를 가지며 교차로 그룹을 진행하였다. 이는 신호에 의한 정지와 함께 많은 교통량으로 인한 영향 또한 존재할 여지가 있다.
본 연구에서 설계한 연동 효율 평가 방법론은 자유 교통류 상태에서 새로운 연동 효율 지표와 차량 궤적 그래프를 통해 신호 데이터 없이 차량의 연동 효율을 평가할 수 있다. 추가로 포화상태에서 차량의 진행 패턴을 고려하여 본 평가 방법론을 확장 시킬 경우 실시간으로 약 5,700개의 서울시 신호교차로 연동 효율 평가가 가능하며 이를 통해 비효율적으로 운영되고 있는 교차로 그룹의 신호를 개선하여 이용자들의 효율적인 움직임을 도모할 수 있다.
둘째, 본 연구는 실제 차량 궤적 데이터를 바탕으로 분석을 진행하였으나 신도시에 새로운 신호 체계를 도입하거나 문제 구간의 신호 개선에 따른 효과 평가 시 데이터를 구할 수 없는 한계가 있다. 따라서 실제 데이터를 구할 수 없는 경우 미시적 시뮬레이션 툴을 이용하여 무작위로 다양한 차량 궤적을 발생시켜 데이터를 생성할 필요가 있다. 생성된 차량 당 정지 횟수와 궤적을 바탕으로 본 지표를 산출하여 새로운 신호 체계 도입에 따른 효과를 평가할 수 있다.
결론 및 향후연구
본 연구에서는 자유 교통류 상태에서 개별차량 속도와 차량별 정지 횟수를 고려한 신호 연동 효율 평가 방법론을 설계하였다. 실제 차량의 주행 행태를 고려하여 새로운 연동 효율 지표를 설계하였으며 새벽 시간대를 대상으로 값을 산출하였다. 산출한 지표 값과 시공도 상에 표출한 차량 궤적의 변화를 기반으로 본 지표의 평가 기준을 마련하였다. 이후 KS-signal을 이용해 기존 연동 효율 지표 값을 구한 뒤 새로운 연동 효율 지표와의 비교 ‧ 분석을 실시하였다. 분석 결과 기존 지표와 달리 차량 궤적 데이터 기반의 새로운 연동 효율 지표는 실제 차량들의 개별적인 주행 행태 변화를 반영함을 확인하였다. 본 연구는 빅데이터 시대에서 끊임없이 축적되고 있는 교통 데이터를 활용하여 기존 이론의 한계점을 보완하였다. 본 연구에서 발전시킬 부분을 향후 연구과제로 남겨둔다.
첫째, 분석 대상지 확장을 통해 본 방법론 적용의 유의미함을 검증할 필요가 있다. 본 연구에서는 분석의 용이함을 위해 주 간선도로 중 현시 패턴이 단순한 단일로가 포함된 강남대로를 분석 대상지로 선정하였다. 향후 현시 패턴이 복잡한 교차로 그룹에서도 새로운 연동 효율 지표의 적용이 용이한지 확인할 필요가 있다. 또한 분석 시 데이터의 한계로 분석 가능 기간에 제약이 있었다. 현재 강남대로는 지하철 연장 공사가 진행 중이며 본 분석 구간은 crest section으로 높은 속도로 도로를 주행하는데 제약이 있을 수 있다. 따라서 연구 결과의 타당성을 확보하기 위해 보다 분석 구간의 확장과 장기간의 데이터를 이용해 해당 결과의 유의미함을 증명할 필요가 있다.
둘째, 새로운 연동 효율 지표의 식과 평가 기준의 한계를 보완하여 확장시킬 필요가 있다. 지표 설계 시 사용한 변수인 정지 횟수와 개별 차량의 속도는 서로 독립적이지 않고 종속적이다. 이는 바람직하지 못한 결과를 제시할 수 있으므로 향후 지표의 식을 보정할 필요가 있다. 또한 지표 산출 시 제한속도보다 과속하여 값이 1 이상으로 산출되는 경우를 추가로 고려해야한다. 본 지표는 양방향이 아닌 한 방향의 연동만을 고려한 지표이나 실제 신호는 양방향 최적화를 목표로 설계하므로 본 연구의 지표를 발전시켜 양방향의 효율을 적절히 평가할 수 있도록 해야 한다. 본 지표의 평가 기준 마련 시 정지 지체 기준을 정지 한 번당 본 연구에서 설정한 최소 정지 지체 값인 6(sec/veh)로 가정하였다. 그러나 해당 가정은 차량 정지 1회 당 지체가 6초를 초과할 경우 이를 평가 기준에 반영하는데 한계가 있다. 따라서 향후 기존 이론 내용을 검토하여 해당 기준 값을 객관화 시킬 필요가 있다.
