

서론
1. 연구의 배경 및 목적
2. 연구 범위 및 수행절차
선행연구 고찰
1. 악천후 환경에서의 운전자 불안감 연구사례 고찰
2. 악천후 차선인식 평가사례 고찰
3. 이용자 측면 자율주행 평가사례 고찰
4. 이용자 측면 불안감, 수용성 평가사례 고찰
5. 연구 차별점
방법론
1. 실험 환경 및 장비
2. 실험 내용
3. 피실험자 구성 및 실험 진행방법
4. 평가 방법
분석 결과
1. 이용자 측면 작업부하 및 수용성 평가 결과
2. 시각행태 분석 결과
3. 분석 결과에 따른 시사점
결론
서론
1. 연구의 배경 및 목적
자율주행 기술이 빠르게 발전하고 있다. 빠른 기술 발전 속도에 힘입어 자율주행 시범 차량이 실제 도로를 주행하고 있으며, 이를 통하여 자율주행차가 머지않은 미래에 상용화가 될 수 있을 것이라는 기대감이 점차 높아지고 있다. 이런 기대감에는 직접 운전하지 않고 목적지까지 편하게 이동할 수 있으며, 이동하는 과정에서 자유로운 행위를 할 수 있을 것이라는 자율주행차에 대한 긍정적인 측면이 드러나 있다. 하지만, 완벽한 주행환경이 전제되지 않은 상황에서 자율주행은 불완전한 주행이 발생할 수 있어 이용자에게 불안감을 초래하게 될 가능성이 있다. 특히, 카메라, 레이더, 라이다 등 다양한 센서 기술을 기반으로 하는 자율주행 기술은 악천후 환경에서 부정확한 차선 인식으로 인하여 차로 편측 주행이나 지그재그 주행같이 불안한 주행을 보일 수 있다. 이와 같은 상황에서 자율주행차 이용자들은 많은 불안감을 느낄 수 있으며, 높은 불안감은 자율주행차에 대한 불신과 낮은 수용성으로 귀결될 수 있다. 이러한 문제를 예방하기 위해서는 불완전한 자율주행 환경 요인을 최소화할 수 있는 자율협력주행 인프라 구축이 선행되어야 하며, 이 과정에서 실제 자율주행차를 이용하는 사람들이 만족하고 수용할 수 있는 자율주행이 구현될 수 있도록 이용자 측면에서의 평가가 반영될 수 있어야 한다.
이에 본 연구에서는 우천, 안개의 악천후 환경에서 발생할 수 있는 불완전한 자율주행 상황이 이용자 측면에서 얼마큼 불안감을 느끼게 하고, 수용성을 보일 수 있는지 평가하는 실험을 수행하였다. 실제 자율주행차에 탑승하는 상황에서 이용자가 체감하는 불안감을 평가하기 위하여 자동주행이 가능한 실험차를 활용하고, 비, 안개 환경 구현이 가능한 테스트베드를 활용하여 실험 환경을 최대한 현실감 있게 구현하고자 하였다. 또한, 피실험자들이 체감하는 불안감을 설문 방식에 의한 정성적인 평가뿐만 아니라 시각행태 기반의 정량적 평가까지 종합하여 연구 결과의 신빙성을 높이고자 하였다. 연구 수행 결과를 토대로 악천후 환경에서 발생할 수 있는 불안정한 자율주행은 이용자들에게 높은 불안감을 느끼게 할 수 있으며, 이에 이용자가 느낄 불안감을 해소하기 위하여 관련 기술 연구가 진행될 필요가 있음을 시사하고자 하였다.
2. 연구 범위 및 수행절차
악천후 환경에서 나타나는 자율주행에 따른 이용자 측면 불안감을 종합적으로 평가하기 위하여 다음 내용들을 포함하는 연구를 수행하였다. 악천후 환경 구현을 위하여 한국건설기술연구원 SOC실증연구센터 내 구축된 기상재현 구간 테스트베드 도로와 SAE Level 3 수준의 자동주행이 가능한 실험차를 활용하였다. 총 14명의 피실험자를 모집하였으며, 4일에 걸쳐 주간 시간대에 주행 실험을 진행하였다. 본 연구에서는 자율주행차에 탑승하여 직접 운전 조작을 하지 않고, 자동으로 주행 되는 차량으로 이동을 하는 사람을 이용자라 정의하였으며, 이용자 측면에서 나타나는 작업부하를 설문 기반의 정성평가와 시각행태 기반의 정량평가를 종합하여 도출하였다.
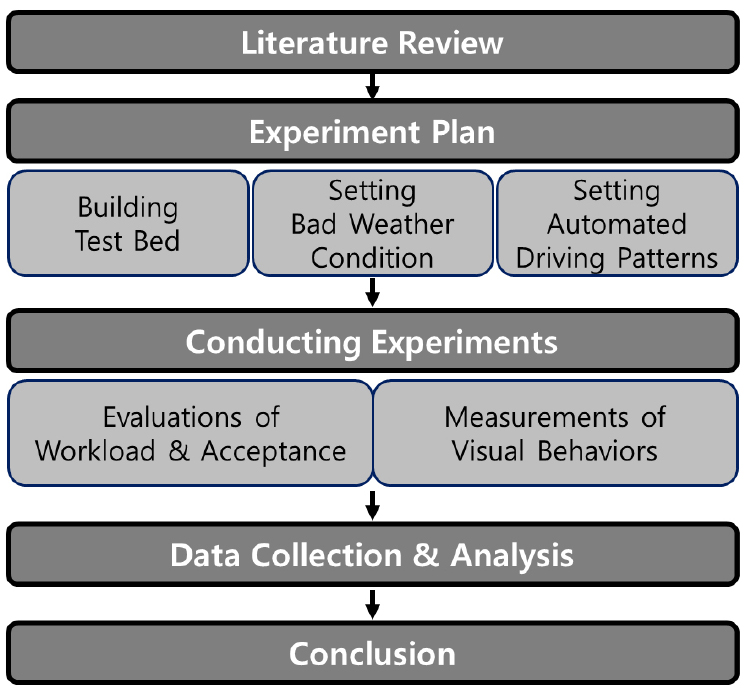
연구 결과 도출을 위하여 다음 Figure 1 내용과 같은 절차로 본 연구가 수행되었다. 먼저, 악천후 환경에서 발생할 수 있는 자율주행 센서 인식 성능 저하 사례를 살펴보고, 악천후 환경에서 발생할 수 있는 불안정한 자율주행 상황을 고찰하여 실험 시나리오를 수립하였다. 그리고 이용자 측면에서 자율주행을 평가한 연구사례를 검토하여 평가 방법을 정립하였다. 이를 바탕으로 테스트베드에서 실차를 활용하여 실험을 진행하였으며, 피실험자들의 설문 응답 결과와 시각행태 데이터를 분석하여 결론 및 시사점을 도출하였다.
선행연구 고찰
1. 악천후 환경에서의 운전자 불안감 연구사례 고찰
도로를 주행하는 과정에서 운전자들은 교통상황이나 외부 환경 변화 등 특정 요인으로 인하여 차량을 운전하거나 탑승하는 것을 싫어하는 경향을 보일 수 있다. 이는 개인 성향에 따라 나타나는 영향이 사람마다 다르게 나타나지만, 교통혼잡 구간을 통과하거나 악천후 환경에서의 주행 등에서는 차량을 운전하거나 탑승하는 사람 모두에게 불안감을 조성할 수 있는 것으로 나타났다(Sullman and Taylor, 2010; Gwyther and Holland, 2012; Schoettle and Sivak, 2014; Taylor et al., 2018). 이 중에서도 비나 안개와 같은 악천후 환경은 직접 차량을 운전하는 것보다 탑승했을 때 사람들이 더 큰 불안감을 느끼는 것으로 나타났다(Taylor et al., 2018). 이와 같은 연구 결과는 사람들은 본인이 직접 통제하지 못하는 경우 더 큰 불안감을 느낄 수 있는 것으로 해석된다. 따라서 기술에 의존해야 하는 자율주행차에 탑승하게 되면 사람들은 악천후 환경에서 더 큰 불안감을 느낄 수 있으며, 이와 같은 상황에서 더 안정적인 주행이 이루어질 수 있는 여건이 마련되어야 할 것이다.
2. 악천후 차선인식 평가사례 고찰
자율주행차는 일반적으로 미국자동차공학회(Society of Automotive Engineers)에서 정의한 5단계 기술 수준으로 정의되며, 현재 기술적으로는 4단계인 고도화된 자율주행까지 구현이 되는 것으로 알려져 있다(SAE, 2018). 이와 같은 고도의 자율주행 기술은 환경 조건이 뒷받침되는 상황에서 무리 없이 작동되지만, 악천후 환경과 같이 센서 인식 성능이 저하되는 환경에서는 정상적인 주행이 어려워질 수 있다. 자율주행 차선 인식과 관련된 LDWS(Lane Departure Warning System), LKAS(Lane Keeping Assistance System)의 성능평가를 수행한 연구 결과를 보면 일반적인 기상조건에서는 직선부나 곡선부에서 성능의 차이가 크지 않지만(Bae and Lee, 2020; Yoon and Lee, 2017), 비나 안개 등 악천후 환경에서는 강도에 따라 차선 인식률이 급격히 저하되는 현상이 나타나는 것을 확인할 수 있다(Lee et al., 2020; Moon, 2022). 이 외에도 기상 악천후가 카메라, 레이더, 라이다 등 센서 기술 성능 저하에 영향을 미치는 현상이 발생할 수 있으며, 이에 따라 이용자가 급정거, 편측 주행 등의 불안정한 주행 상황이 발생할 수 있다는 연구 결과가 도출되었다(Bhusari, 2018; Heinzler et al., 2019; Kutila et al., 2018; Tang et al., 2020).
이와 같은 악조건 환경에서 원활한 자율주행이 가능할 수 있게 지원해주는 자율협력주행 기술 필요성이 대두되고 있다(Jeon et al., 2022). 자율협력주행 기술은 신호기, 교통시설 등 도로 환경에 설치된 시설물을 통해 자율주행 기능을 지원·보완해주는 시스템을 의미한다. 자율협력주행 인프라 구축을 통하여 악조건에서도 이용자가 안정감을 느낄 수 있는 수준의 자율주행 구현이 가능할 수 있어야 한다. 이러한 관점에서 악천후 환경에서 발생할 수 있는 불안정한 자율주행에 대하여 실제 이용자들이 얼마큼 불안감을 느끼고, 어떤 주행행태를 보일 때 높은 수용성을 보이는지에 대한 평가가 필요하다(Lee et al., 2021; Dettmann et al., 2021; Hwang et al., 2021).
3. 이용자 측면 자율주행 평가사례 고찰
자율주행 환경에서 이용자가 만족하거나 불안감을 느낄 수 있는 자율주행 행태에 관한 연구가 지속적으로 이루어지고 있다(Dettmann et al., 2021; Hwang et al., 2021; Lee et al., 2021; Lin et al., 2020; Stapel et al., 2019; Yusof et al., 2016). Table 1은 관련 연구에서 도출된 시사점을 정리한 것으로, 일반적인 주행 상황에서 이용자 측면에서 체감하는 만족도를 평가하거나, 시뮬레이터를 활용하여 자율주행차의 거동 행태에 따른 승차감 기반 만족도 평가가 중점적으로 수행된 것을 확인할 수 있다. 선행연구 결과를 통하여 사람들은 대체로 보다 보수적인 자율주행 행태를 상대적으로 더 선호하며, 복잡한 교통환경에서 더 큰 작업부하를 느낄 수 있는 것으로 나타났다. 또한, 선행연구에서는 실제 자율주행 기술의 수용성을 높이기 위하여 이용자들이 만족하고, 안정감을 느낄 수 있는 최적의 자율주행 행태를 구현해야 할 필요성을 제시하고 있다. 한편, 자율주행 기술의 안전성이 담보되지 않은 제약으로 인하여 가상환경 기반의 시뮬레이터를 이용한 실험이 많이 활용되고 있으며, 실차 기반 자율주행 평가는 제한적으로 이루어지고 있는 것을 확인할 수 있었다.
Table 1.
Key Implications from Previous Studies
| Journals | Key Implications |
| Dettmann et al. (2021) |
- The autonomous driving pattern was analyzed as a major factor in determining the preference for autonomous driving by driving speed, deceleration, and acceleration in continuous driving situations. - It suggests that the autonomous driving pattern needs to be designed according to specific situations and driving environments rather than individual users’ preferences. |
| Hwang et al. (2021) |
- Although the preference for self-driving behavior varies from individual to individual, there is a tendency to prefer behavior similar to one’s driving tendency, and extreme driving behaviors are avoided regardless of one’s tendency. |
| Lee et al. (2021) |
- Check the level of frustration felt by users in conservative self-driving behavior and the level of anxiety felt in aggressive self-driving behavior. |
| Lin et al. (2020) |
- As a result of the user-side satisfaction evaluation according to the autonomous driving shuttle operation on the university campus, generally showed a positive response. |
| Stapel et al. (2019) |
- Through the actual vehicle-based autonomous driving evaluation, it is confirmed that the mental workload of the user increases in a situation where traffic is complicated. - Identify greater mental workload for those without similar self-driving experience than for those with similar self-driving experience |
| Yusof et al. (2016) |
- Analysis of the difference in satisfaction evaluation in acceleration and deceleration situations that appear in aggressive or conservative autonomous driving situations compared to driving propensity - Subjects generally showed high satisfaction evaluation results in conservative situations. |
시뮬레이터 기반 실험은 다양한 도로교통 환경을 구현할 수 있고, 동일한 상황을 모든 피실험자에게 구현할 수 있어 현실에서 수행하기 어려운 실험을 수행하는데 장점이 있다. 다만, 승차감을 반영하기 어려워 실제 이용자가 느낄 불안감이나 수용성을 평가하기 어려운 한계가 있다. 실차 기반 실험은 이용자들의 실제 탑승감을 기반으로 주행에 따른 불안감이나 수용성을 평가할 수 있다는 장점이 있지만, 실험 참가자들의 안전을 담보하기 어려운 제약조건이 있다. 이러한 이유로 실차 기반 자율주행 실험은 통제관이 동승한 상태에서 돌발상황에 대비하여 즉각적인 통제권 전환이 이루어질 수 있도록 대비한 상태로 실험이 진행되며, 안전이 전제된 환경 내에서 제한적인 실험을 통해 연구가 수행되고 있다.
4. 이용자 측면 불안감, 수용성 평가사례 고찰
이용자 측면에서 자율주행 탑승에 따른 평가는 주로 설문 기법을 통해 이루어지고 있다. 대표적인 평가 방법으로 미국항공우주국에서 고안한 NASA-TLX 설문 기법이 활용되고 있다. NASA-TLX는 탑승에 따른 신체적·정신적 부하(workload)를 평가하는데 목적을 두고 고안되었다(Hart, 2006). 정신적(Demand), 신체적(Physical), 시간적 압박감(Temporal), 노력 수준(Effort), 성취도(Performance), 당혹감(Frustration)의 6가지 하위 범주로 구성되어 각 항목에 대하여 피실험자가 느낀 수준을 평가하도록 하여 이를 전체 부하량으로 종합하거나 개별 항목별 부하량으로 평가하는 방식으로 활용된다(Lin et al., 2020; Stapel et al., 2019). 이외에도 평가 목적에 따라 편안함이나 즐거움을 평가하기 위해 고안된 설문 기법(Engelbrecht, 2013)과 자동화 기술에 대한 신뢰성향을 평가하기 위한 설문 기법(Merritt et al., 2013) 등도 평가에 활용되고 있다.
최근에는 시각행태, 심박수, 맥박 등 실험 간 발생하는 피실험자의 생체 변화 정보를 분석해 불안감을 정량적으로 분석하는 연구사례들이 도출되고 있다(Arakawa et al., 2019; Beggiato et al., 2019; Stapel et al., 2019). 시각행태 중 주시점의 많은 변화는 이용자의 작업부하가 상대적으로 커진다는 것을 의미하며, 동공이 커질수록 이용자가 상대적으로 더 놀라거나, 불안감을 느끼는 지표로 활용되었다. 또한, 이용자들이 갑작스럽게 놀랄 수 있는 상황에서 심박수가 빨라지는 현상이 나타나는 것을 확인할 수 있으나, 이와 같은 심박수 변화는 상대적으로 오랜 시간 진행되는 실험 환경에서 유의한 결과가 도출되는 것을 확인할 수 있다.
5. 연구 차별점
선행연구 고찰을 통하여 악천후 환경이 탑승자에게는 불안감을 느끼게 하고, 자율주행차 측면에서는 불안정한 주행을 초래할 수 있는 것을 확인하였다. 이에 본 연구에서는 실제 악천후 환경을 구현하였을 때 나타날 수 있는 불안정한 자율주행 상황에서 이용자들의 불안감과 수용성을 평가하는 실험연구를 수행하였다. 이는 악천후 환경에서 발생할 수 있는 불안정한 자율주행 환경과 관련하여 실제 이용자들이 느낄 수 있는 불안감 수준을 실차 기반 실험을 통하여 평가하였다는 점에서 차별점이 있다. 또한, 이용자들이 느끼는 불안감을 설문 기법 기반의 정성평가와 시각행태 기반의 정량평가를 함께 분석하여 결과의 신빙성을 높이고자 하였다.
방법론
본 연구에서는 악천후로 인하여 나타날 수 있는 불완전한 자율주행 상황에서 이용자가 느낄 불안감을 평가하기 위하여 테스트베드 환경 기반의 실차 실험을 수행하였다.
1. 실험 환경 및 장비
1) 실험 환경
본 실험은 2022년 10월 13일(목), 14일(금), 19일(수), 20일(목) 총 4일에 걸쳐 한국건설기술연구원에서 운영하는 SOC 실증연구센터에서 진행되었다. 실증연구센터 내 기상재현 구간(터널형 쉴드)과 직선시험도로를 활용하여 건조, 우천, 안개 기상환경에서 나타날 수 있는 자율주행 상황을 구현하였다. 기상재현 구간에는 연장 200m 길이의 터널 내에 안개 환경 구현이 가능하고, 터널형 쉴드 100m 구간과 이어지는 직선시험도로 100m 구간에 우천 환경 구현이 가능하도록 관련 시설이 설치되어 있다. 안개 환경은 저중고 시정을 설정하여 수준에 맞춰 생성 및 구현이 가능하며, 우천의 경우 0-50mm/h 사이로 실시간으로 물을 분사시킬 수 있도록 관련 설비가 구축되어 있다. 본 연구에서는 센서 인식 성능이 제대로 작동되지 않을 상황을 고려하여 집중호우 기준인 30mm/h를 우천 환경으로, 시야가 제대로 확보되지 않는 중시정(100-150m)의 안개 환경(Lee et al., 2020)을 실험 조건으로 설정하였다.
2) 실험 차량
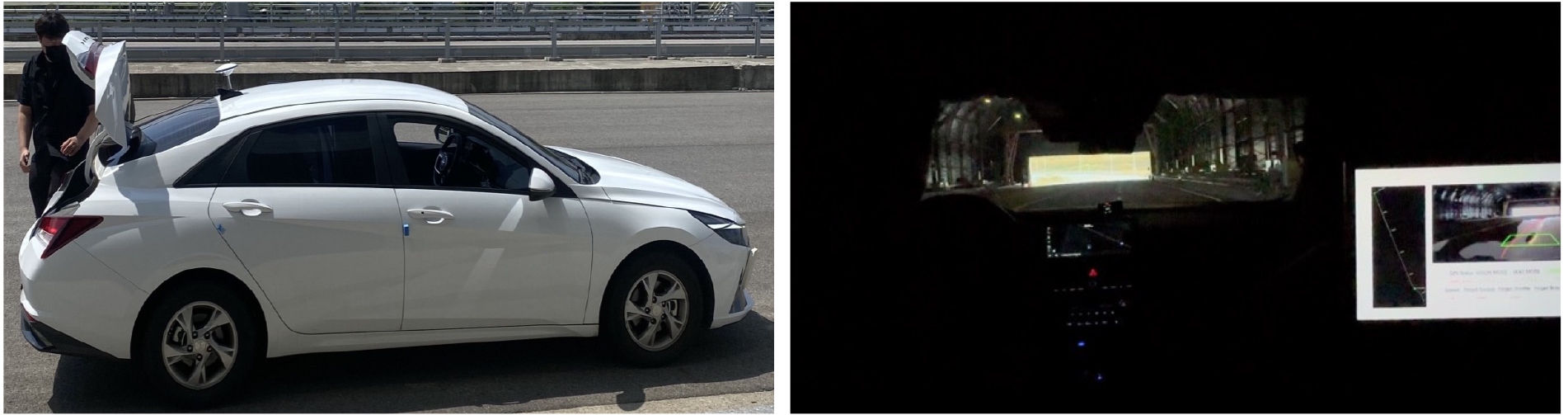
실험용 차량은 한국건설기술연구원에서 보유하고 있는 SAE Level 3 수준의 자율주행 구현이 가능한 아반떼 차량을 활용하였다. 이 차량은 Figure 2에서와 같이 way-point 기반 자동주행이 가능하도록 관련 시스템이 구축되어 GPS 정보를 기반으로 지정된 point를 따라 동일한 주행을 운전 조작 없이 반복적으로 수행할 수 있다. 사전에 기록된 경로와 구간별 주행속도를 입력하면 시작 지점부터 종료 지점까지 운전자가 핸들을 잡고 있지 않더라도 지정된 경로에 맞춰 자동으로 주행이 이루어진다. 본 연구에서는 돌발상황에 대비하고, 피실험자들의 안전을 고려하여 30km/h로 주행속도를 설정하여 실험을 진행하였다.
2. 실험 내용
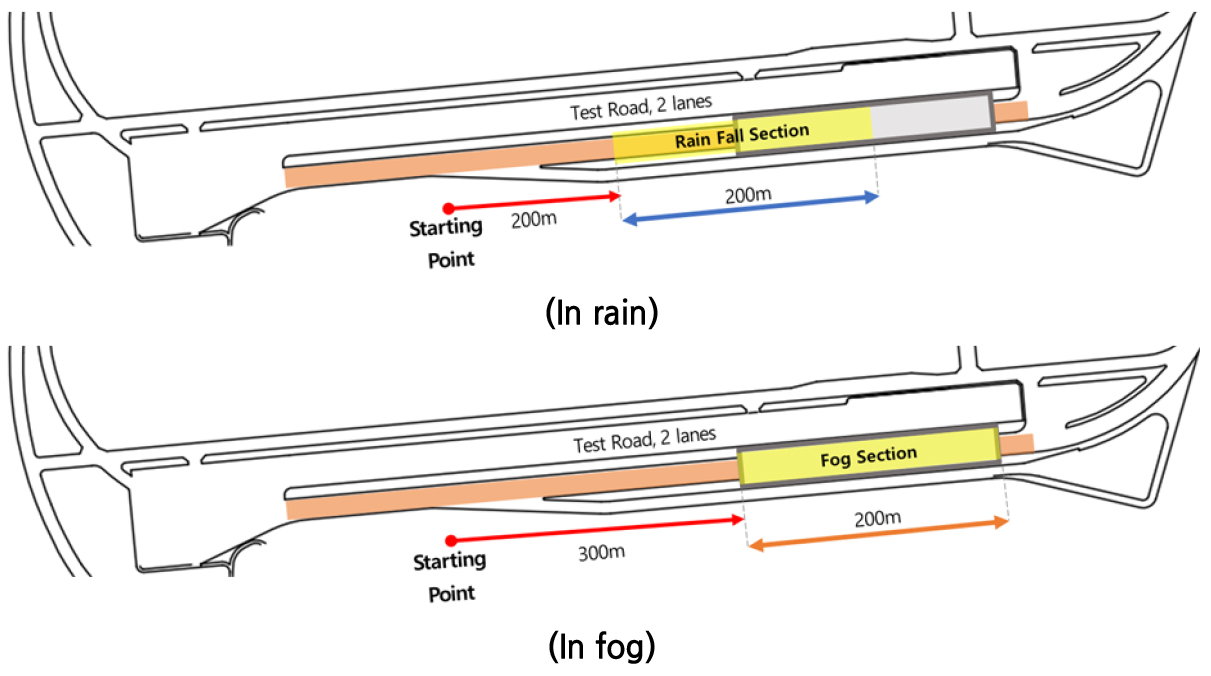
본 실험에서는 기상 악천후 환경에서 나타나는 자율주행에 대하여 이용자 측면 평가를 수행하기 위하여 건조 환경에서 나타날 수 있는 차로 중심으로의 직진주행 상황과 우천 및 안개 환경에서 Figure 3과 같이 차선인식 성능 저하에 따라 나타날 수 있는 차로 내 좌·우 편측주행 상황과 지그재그 주행 상황을 구현하였다. 이러한 조건들을 모두 고려하여 다음 Table 2 내용과 같이 건조 환경에서 1회, 우천 및 안개 환경에서 각 3회씩 총 7개의 시나리오를 설계하여 실험을 진행하였다. 시나리오별 주행 거리는 Figure 4와 같이 우천 환경 400m, 안개 환경 500m로 설정하여 시나리오당 1분 이내로 주행이 끝나도록 설계하였다. 전체 주행 구간은 실험 참가자가 차량 및 주행환경에 적응할 수 있도록 200-300m 구간을 먼저 주행한 후 기상재현 구간 200m를 주행하도록 설정하였다.
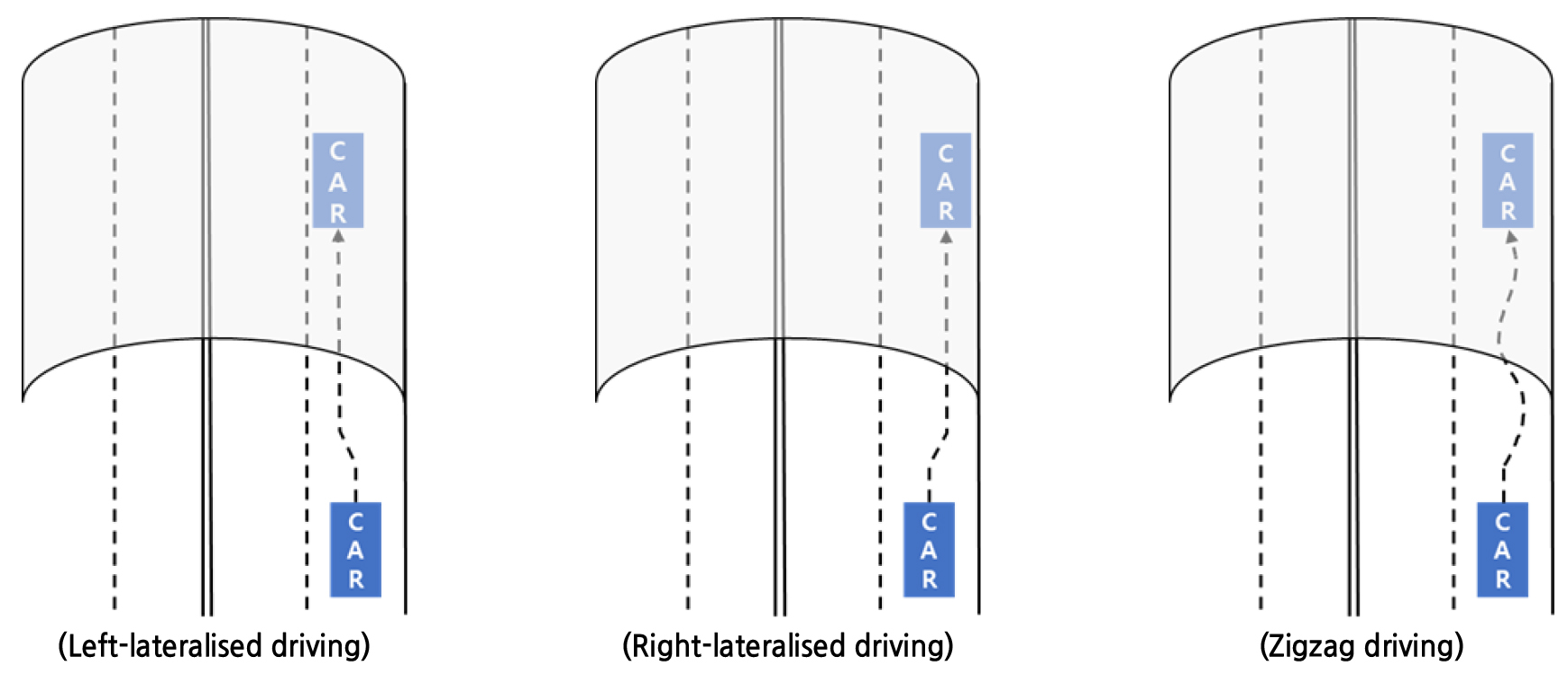
Table 2.
Case study of available sight field in urban underground road
3. 피실험자 구성 및 실험 진행방법
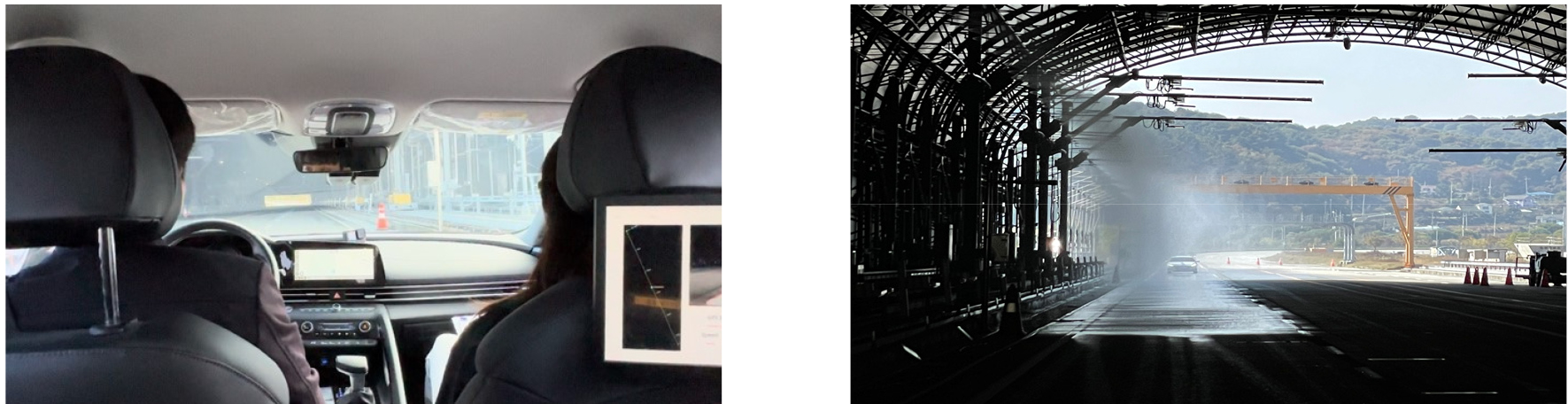
실험에 참여한 피실험자는 총 14명으로 20대 3명, 30대 9명 40대 1명, 50대 1명으로 구성하였다. 기상환경 구현에 따른 여건을 고려하여 건조-우천-안개 순으로 실험을 진행하였으며, 각 기상환경 내 순서는 정해진 시나리오 순서대로 진행하였다. 실험 진행 간에는 Figure 5와 같이 실험자 2인이 각각 운전석과 뒷좌석에 동승하여 실험 진행을 주관하였다. 운전석에 탑승한 진행자는 실험 진행 간 차량 운전 및 비상 상황을 대비하여 즉각적으로 통제권 전환을 수행하는 역할을 수행하였다. 그리고 뒷좌석에 탑승한 실험자는 차량 자동주행 작동 및 시선추적 장비 운용을 담당하였다. 피실험자는 조수석에 탑승하여 시선추적 장비를 착용한 상태에서 전방을 주시하며 주행행태를 평가하도록 하였다.
피실험자가 조수석에 탑승하면 먼저 시선추적 장비를 착용하여 초점을 맞추는 작업을 진행하였다. 매 시나리오 시작 전 실험자가 피실험자 상태를 확인하였고, 이상 없을 시 실험을 진행하였다. 주행이 종료된 후 시선추적 장비 녹화를 종료하였고, 이후 사전에 설명한 평가지를 보며 해당 시나리오에 대하여 체감한 바를 설문 문항에 맞춰 바로 평가하도록 하였다.
4. 평가 방법
이용자 측면에서 기상환경에 따른 자율주행 불안감 수준을 평가하기 위하여 NASA-TLX 설문 평가 방법을 활용하였다. NASA-TLX는 미국항공우주국(National Aeronautics and Space Administration)에서 개발한 주관적 직무난이도 평가 방법으로 Mental, Physical, Temporal, Performance, Effort, Frustration의 6가지 세부 평가항목으로 구성되어 있으며, 이용자 측면에서 자율주행 상황을 평가하는 많은 연구에서도 활용되었다(Lin et al., 2020; Stapel et al., 2019). NASA-TLX는 본래 최저점인 0점에서 최고점인 100점 사이로 평가하도록 설계되었으나, 이후 관련 연구를 활용한 사례를 살펴보면 연구 성격과 실험자 판단에 따라 7점, 10점 척도 등으로 응용하는 것을 확인할 수 있다(Chen et al., 2022; Memarian and Mitropoulos, 2011; Virtanen et al., 2022). 본 연구에서는 시나리오별로 발생하는 주행 상황이 짧은 시간 내에 종료됨에 따라 참가자들이 체감하는 수준을 깊이 있게 평가하기 어려울 것으로 판단하여 10점 척도를 사용하는 것으로 계획하였다. 또한, 평가항목 중 ‘Effort’의 경우 본 실험에서 참가자들이 수행하는 과업 성격에 맞지 않는 것으로 판단하여 이를 대신하여 주행행태에 대한 ‘수용성’을 평가하는 것으로 응용하여 다음 Table 3 내용과 같이 설문 문항을 구성하였다.
Table 3.
Organize survey questions based on the NASA-TLX
도출되는 6가지 평가항목 중 직접적으로 부담감과 관련된 평가를 한 신체적·정신적 부담감, 시간적 압박감, 스트레스 수준의 4가지 항목과 자율주행 행태 관련 성취도와 수용성을 평가한 2가지 항목을 각각 분리하여 작업부하(Equation 1)와 수용성(Equation 2)으로 정의하여 평가하였다.
Equation 1에서 M은 작업부하 평가에 활용된 네 가지 항목(신체적·정신적 부담감, 시간적 압박감, 스트레스 수준)의 집합이며, S는 평가항목별로 도출된 점수를 의미한다. 그리고 Equation 2에서 A는 수용성 평가에 활용된 두 가지 항목(성취도, 수용성)의 집합을 나타낸다.
NASA-TLX 결과와 함께 실험 간에 나타난 피실험자들의 불안감 수준을 평가하는 방법으로 시선추적장비를 통하여 측정되는 주시시간과 동공 크기를 지표로 활용하였다. 주시시간은 주시점(fixation)이 특정한 지점에 머문 시간을 뜻하는 것으로, 이용자가 주행 중 나타나는 다양한 정보를 수집하는데 일정한 시간 해당 지점을 주시하는 것이 필요하다(Lee et al., 2022). 따라서, 평균 주시시간이 짧을수록 주시점이 빠르게 이동하며 정보를 습득해야 하는 요구가 높아져 시각적 작업부하가 커진다고 해석될 수 있다. 그리고 동공 크기는 시각 행태 중 놀람, 불안감 등을 확인할 수 있는 지표로 활용되고 있다(Beggiato et al., 2019). 시각행태 분석을 위하여 활용한 시선추적 장비는 Tobii Technology 사에서 개발한 Tobii pro glasses 3 모델이다. 해당 제품은 Figure 6에서와 같이 안경 형태로 제작되어 착용이 쉬우며, 저시력자를 위한 렌즈 액세서리가 있어 시력 교정이 가능하다. 해당 기기를 통하여 실험 간 피실험자들의 동공 크기를 1/1000초 간격으로 수집할 수 있다.

분석 결과
1. 이용자 측면 작업부하 및 수용성 평가 결과
1) 작업부하 평가 결과
각 주행 상황별 피실험자들의 작업부하 수준을 평가한 결과 Table 4와 같이 지그재그 주행, 우 편측주행, 좌 편측주행 순으로 높은 수준의 응답 결과가 도출되었다. 건조 상황에서는 작업부하가 평균 2.3점으로 상대적으로 가장 낮은 수치를 보였지만, 좌 편측주행 상황에서는 우천 2.96점, 안개 4.13점으로 나타났다. 그리고 우 편측주행에서는 우천 4.46점, 안개 5.39점이 도출되었으며, 지그재그 주행 상황에서는 우천 5.79점, 안개 6.36점으로 상대적으로 가장 높은 작업부하 수준이 나타난 것으로 평가되었다. 이와 같은 결과에서 나타난 특징은 좌 편측주행 보다는 우 편측주행에 상대적으로 더 높은 작업부하가 평가되었다는 점이다. 조수석에 탑승한 피실험자들은 가장자리 차로로 주행하는 실험 환경에서 우측 벽면과 시설물에 충돌할 수 있다는 위험을 더 크게 느끼어 이와 같은 결과가 도출된 것으로 해석된다. 또한, 같은 주행 상황에서도 우천 환경보다는 안개 환경에서 작업부하가 더 큰 특징이 도출되었다. 이는 안개 환경이 이용자 측면에서 더 큰 불안감을 조성한다는 것을 의미한다. 적은 표본이지만 연령대별로 도출된 작업부하 결과를 살펴보면, 다른 연령대에 비하여 40대 이상에서 전반적으로 작업부하를 더 크게 느낀 것으로 나타났다. 특히, 안개 환경에서 우 편측주행과 지그재그 주행 상황에서 약 8점 안팎의 높은 수치가 기록되어 연령대가 높을수록 불안정한 주행 상황에서 더 큰 불안감을 느낄 수 있다는 경향이 도출되었다.
Table 4.
Results of workload evaluations by scenarios (10 scale)
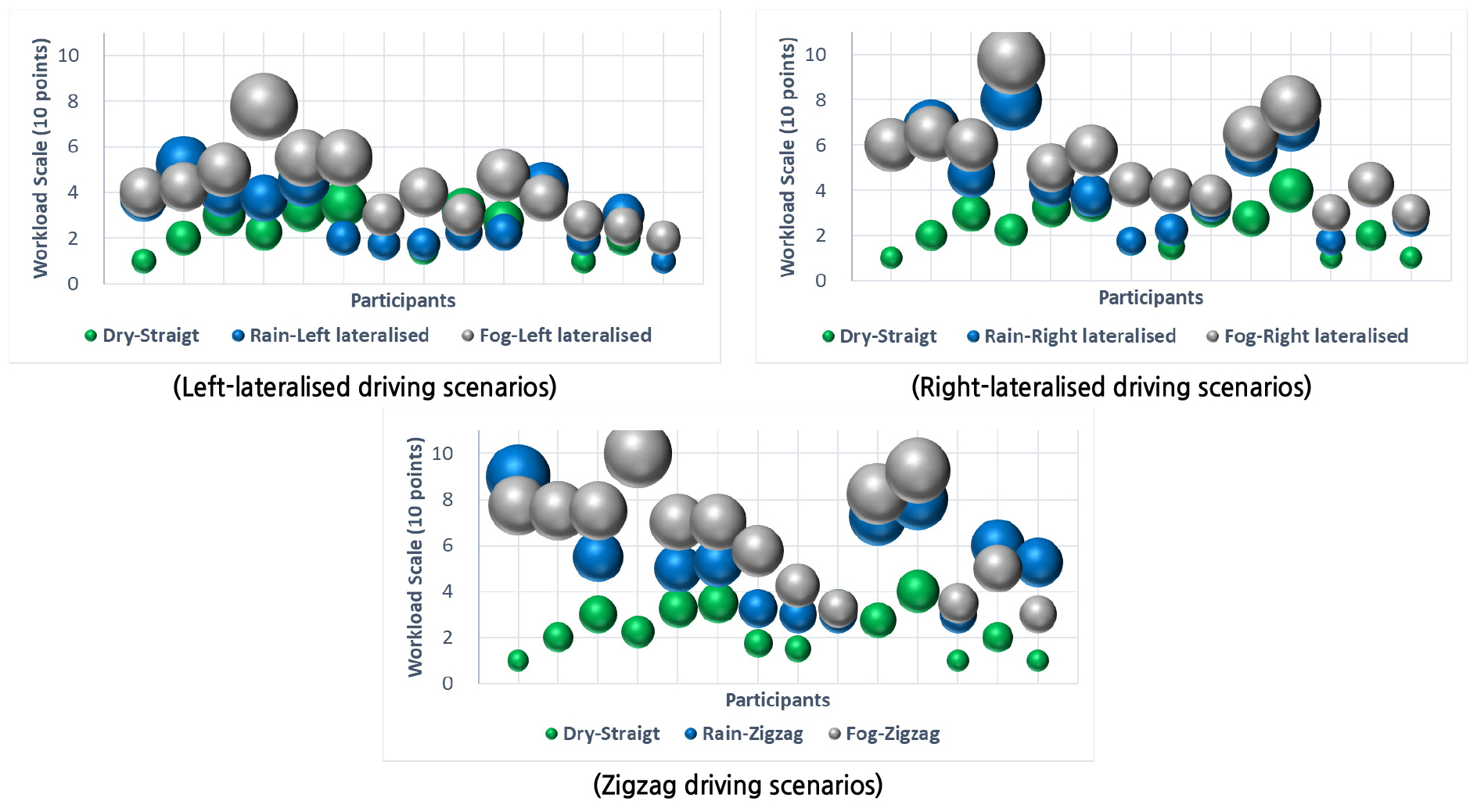
피실험자별로 느낀 작업부하 수준 차이를 주행 상황별로 살펴본 결과 Figure 7과 같은 특징이 도출되었다. 건조 상황에서 피실험자가 느낀 작업부하 수준은 1-4점으로 상대적으로 낮은 수준을 보였다. 좌 편측주행에서는 피실험자별로 기상환경에 따른 작업부하 평가 차이가 건조 상황에서의 주행 평가보다 상대적으로 큰 차이를 보이지 않지만, 우 편측주행과 지그재그 주행 상황에서는 상대적으로 평가 차이가 큰 특징을 보였다. 특히, 대부분의 피실험자가 우천 보다 안개 환경에 더 큰 작업부하를 느낀 것으로 도출된 특징을 확인할 수 있다.
2) 수용성 평가 결과
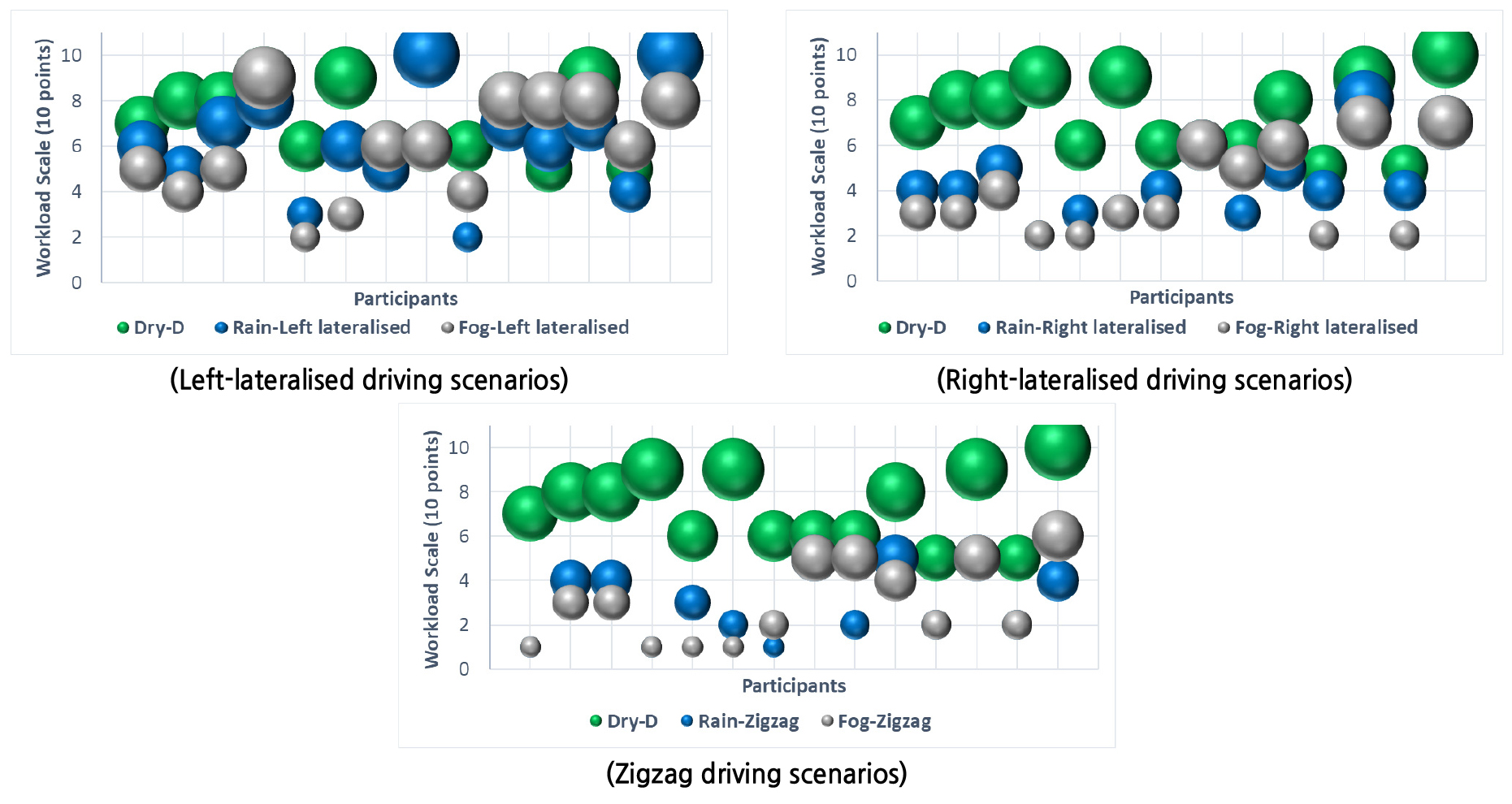
Table 5는 피실험자들이 밝힌 수용성 평가 결과로, 앞서 제시한 작업부하 수준 평가와 반비례 결과가 도출되는 특징이 나타났다. 건조 상황에서의 수용성 평가가 평균 7.29점이었으며, 좌 편측주행 상황은 우천 6.36점, 안개 5.86점으로 상대적으로 높은 수용성을 보였다. 반면, 우 편측주행 상황에서는 우천 4.43점, 안개 3.93점이었으며, 지그재그 주행 상황에서는 우천과 안개 환경 모두 2.93점으로 상대적으로 낮은 수용성을 보였다. 이와 같은 특징은 Figure 8에 제시된 그래프를 통해서도 확인할 수 있으며, 피실험자들이 높은 작업부하를 체감했을수록 낮은 수용성을 보이는 것을 확인할 수 있다. 연령대별로 나타난 결과를 살펴보면 40대 이상이 다른 연령대에 비하여 상대적으로 안정적으로 주행하는 건조 환경과 좌 편측주행 상황에서 높은 수용성을 보였지만, 다른 주행 상황에서는 낮은 수용성을 보이는 결과가 도출되었다.
Table 5.
Results of acceptance evaluations by scenarios (10 scale)
2. 시각행태 분석 결과
1) 주시행태 분석 결과
피실험자들은 안개 환경에서 상대적으로 적은 주시시간 행태를 보였다. Table 6은 주행 상황별 피실험자들의 평균 주시시간과 주시 횟수 당 평균 주시시간을 기록한 표이다. 내용을 살펴보면 피실험자들은 작업부하가 높았던 주행 상황에서 평균적으로 더 짧게 주시하는 행태 특징을 보였다. 또한, 안개 환경에서 우천 환경보다 약 38ms-150ms까지 더 짧은 주시시간을 보였으며, 상대적으로 작은 편차 수치가 기록되었다. 이와 같은 특징은 작업부하가 크고 시야가 좋지 않은 환경에서 이용자가 시각적으로 정보를 획득하는데 어려움이 있는 것으로 해석할 수 있다. 연령대별로 주시시간 행태 특성을 살펴보면, 특별한 특징 차이가 도출되지 않는 것을 확인할 수 있었다.
Table 6.
Results of fixation time by scenarios (ms)
2) 동공 크기 분석 결과
피실험자들의 동공 크기를 분석한 결과, Table 7 내용과 같이 건조 상황에서보다 우천 및 안개 환경에서 상대적으로 더 커지는 현상이 나타나는 것으로 도출되었다. 우천 환경에서는 좌·우 편측주행, 지그재그 주행 순으로 3.43mm, 3.53mm, 3.52mm가 기록되었고, 안개 환경에서는 각각 4.62mm, 4.82mm, 4.85mm가 기록되었다. 이는 건조 상황에서 기록된 2.71mm보단 큰 수치가 기록된 것으로 악천후 환경에서 피실험자들이 놀라거나 불안감을 느낀 심리가 반영된 것으로 해석된다. 다만, 피실험자들이 응답한 작업부하 수준과 동공 크기가 비례하는 특징은 나타나지 않아 동공 크기는 작업부하 수준보다는 악천후 기상환경에 더 영향을 받는 것으로 해석될 수 있는 특징을 보였다. 연령대별로 나타난 동공 크기 행태 특징을 살펴보면, 전반적으로 연령대가 낮을수록 상대적으로 동공 크기가 더 큰 특징이 도출되었으며, 주행 상황별로 나타난 행태 경향과 일치하여 크기 수치가 증감하는 것을 확인할 수 있었다.
Table 7.
Results of pupil diameter by scenarios (mm)
3. 분석 결과에 따른 시사점
본 연구는 악천후 환경에서 발생할 수 있는 불안정한 자율주행 상황에서 이용자가 느끼는 작업부하를 설문 평가와 시각행태 분석을 통해 도출하였다. 이를 통해 도출할 수 있는 시사점은 다음과 같다. 피실험자들은 건조한 날씨에서 발생하는 자율주행에 대해서 상대적으로 낮은 작업부하와 높은 수용성을 보였다. 반면, 악천후 환경에서 보이는 불안정한 자율주행에 대해서는 상대적으로 높은 작업부하와 낮은 수용성을 보였다. 자율주행 이용자들은 악천후로 인하여 안정적인 주행이 이루어지지 않을 때 높은 불안감을 보였으며, 그러한 자율주행은 수용하기 어렵다고 평가하였다. 자율주행 수용성을 높이기 위해서는 악천후 환경이 발생하여도 이용자가 자율주행 기술을 신뢰할 수 있도록 관련 기술의 안전성이 담보될 수 있어야 할 것이다.
또한, 좌 편측주행보다 우 편측주행에서 피실험자들은 더 큰 작업부하를 느꼈다고 응답하였는데, 피실험자가 조수석에 탑승한 상태에서 가장자리 차로로 주행이 이루어지다 보니 우측 도로 시설물과 충돌할 수 있다는 위협감이 높았기 때문으로 해석된다. 이는 이용자가 어느 좌석에 앉는지에 따라 위험을 느낄 수 있는 주행 상황이 다를 수 있음을 시사한다. 이에 악천후 환경에서도 자율주행차가 가급적 차로 중심으로 주행할 수 있도록 차선 인식률을 높일 수 있는 시설물이 구축되거나, 이용자가 느낄 불안감을 최소화하기 위하여 이용자가 탑승한 방향으로 쏠리는 주행은 발생하지 않도록 하는 기술 구현이 필요할 것이다.
마지막으로 안개 환경이 우천 환경보다 피실험자들에게 상대적으로 더 큰 작업부하와 불안감을 조성하는 것으로 확인되었다. 선행연구에서 자율주행 센서 성능이 우천 보다 안개 환경에서 더 저하되는 것으로 나타났는데, 이를 이용하는 이용자 입장에서도 안개 환경이 더 불안감을 느낀다는 것을 확인할 수 있었다. 이는 안개로 인하여 시야가 제한되는 상황이 자율주행 기술과 이용자 모두에게 부정적인 영향을 초래하는 점을 확인한 것으로, 악천후 중 특히 안개 환경에서 원활한 자율주행이 이루어질 수 있도록 관련 자율주행 기술 및 인프라 개발이 필요할 것으로 보인다.
결론
본 연구에서는 악천후 환경에서 발생할 수 있는 불안정한 자율주행이 실제 이용자 측면에서 얼마큼 불안감이 느껴지는지 실차를 통해 평가하는 실험이 수행되었다. 악천후 기상환경이 자율주행 센서 인식 저하에 영향을 주는 사례를 검토하였고, 그러한 인식 저하가 초래할 수 있는 자율주행 상황을 고찰하였다. 이를 토대로 지정된 경로를 따라 자동주행이 가능한 실차를 활용하여 테스트베드에서 우천 및 안개 환경을 구현했을 때 나타나는 이용자 측면 불안감을 고안된 설문 기법과 시각행태 분석을 통해 도출하였다. 분석 결과, 이용자들은 자신이 탑승한 위치에서 가까운 측면으로 주행하는 상황과 차로 내에서 지그재그로 주행하는 상황에서 큰 불안감을 느끼는 것을 확인할 수 있었다. 또한 우천 환경 보다 안개 환경에서 이용자들은 더 큰 불안감을 느끼는 것으로 나타났다. 이는 악천후 환경은 불안정한 자율주행을 초래할 수 있으며, 불안정한 자율주행이 발생하면 이용자들은 높은 불안감을 느껴 자율주행을 이용하지 않을 가능성이 높아질 수 있다는 점을 시사한다.
다만, 본 연구는 적은 피실험자를 대상으로 제한된 테스트베드 도로 환경에서 실험이 진행되어 관련 연구의 필요성을 제시하는 사전적 성격의 연구라는 한계가 있다. 본 연구에서 구현한 불안정한 주행 외 여러 요인에 따라 나타나는 급 감·가속, 급회전 등 자율주행차의 다른 거동 행태 특성에 의한 요인에 의한 영향도 평가가 될 수 있어야 한다. 향후에 관련 실험 여건이 고도화된다면 다양한 연령대의 많은 피실험자를 대상으로 실험을 진행할 수 있을 것이다. 또한, 안전이 담보된다면 VILs 시스템과 같은 실제 자율주행 알고리즘을 활용할 수 있는 실험차를 활용하여 세분화된 주행속도 및 기상환경에서 나타나는 이용자 측면 불안감과 수용성을 심도 있게 분석할 수 있을 것이다.
현재 국내에서는 자율주행 기술 및 인프라 개발이 한창 진행되고 있으며, 관련 연구가 활발히 이루어지고 있다. 하지만, 자율주행을 이용하게 될 이용자 측면에서의 연구는 미비한 상황으로 다양한 도로교통 환경에서 이용자들이 자율주행을 신뢰할 수 있어야 관련 연구 개발 성과가 빛을 보게 될 것이다. 따라서, 자율주행 상황에서 이용자들이 얼마큼의 불안감과 수용성을 보일지에 관한 연구는 자율주행 기술 개발과 맞물려 지속적으로 이루어져야 하며, 이를 통해 이용자들이 적은 불안감과 높은 수용성을 보이는 자율주행 기술이 개발되기를 기대한다.
