

서론
선행연구
1. 커넥티드 자율주행차의 도입 효과에 관한 연구
2. 자율주행차 전용차로에 관한 연구
3. 본 연구의 차별성
혼합 교통류의 교통용량: 교통 기본도 관점으로
다중차로 고속도로 혼합 교통류 최적 운영 방안
1. 최적화 프레임워크 설계
2. 수치 예제 분석 – 이중 차로 고속도로 혼합 교통류
3. 민감도 분석
결론
서론
최근 정보통신 시스템과 자동화 기술이 빠르게 발전하면서 자율주행 차량에서 한 단계 더 진보된 커넥티드 자율주행 차량, CAV(Connected and Autonomous Vehicle) 개념이 기존 자동차 시장에 전면 등장하고 있다. CAV는 자율주행 시스템과 차량과 차량 간 V2V(Vehicle to Vehicle) 통신, 차량과 인프라 간 V2I(Vehicle to Infrastructure) 통신과 같은 커넥티드 시스템이 결합하여 사람이 운전하는 차량, HDV(Human-driven Vehicle)를 대체할 수 있는 최첨단 차량을 의미한다. CAV는 안전, 교통용량, 이동성, 환경 및 경제 등 다양한 관점에서 긍정적인 영향을 보여주고 있다(Rana and Hossain, 2021).
특히, CAV는 군집주행(Platooning) 기술을 통해 교통운영 효율성과 안정성을 향상할 수 있는 잠재력을 가지고 있다. 군집주행은 후행 차량이 일정 간격을 두고 선행 차량을 자동으로 추종하며 하나의 차량처럼 운행하는 방식을 의미한다(Hurtado-Beltran and Rilett, 2021). 유럽은 올해 초 군집주행 관련 기술 상용화를 위한 ‘앙상블 프로젝트(ENSEMBLE)’를 끝마쳤다. 이 프로젝트는 브랜드와 관계없이 대형트럭 군집주행이 가능하도록 기술을 개발하고 실증 과정을 거쳤다. 국내도 오는 2027년 SAE 레벨3에 준하는 기술 상용화를 목표로 군집주행 관련 기술 개발에 힘쓰고 있다. 2021년 9월에는 약 80km의 고속도로 구간에서 대형트럭 4대가 군집주행에 성공했다.
그러나, 자율주행 차량이 상용화가 이루어질 때까지 많은 시일이 걸릴 것으로 전망되며, 상용화가 이루어져도 도로의 모든 차량이 자율주행 기술을 탑재하기 전까지 사람이 운전하는 일반차량과 자율주행 차량이 도로를 공유하는 혼합 교통류 형태가 보여질 것으로 예상된다. 설문조사에 따르면 응답자의 71%는 자율주행 차량과 비자율주행 차량이 혼재된 교통 하에서 심각한 안전 문제가 발생할 것으로 예상하였다(KPMG, 2019). 이를 해결하기 위한 대안으로 자율주행 차량과 비자율주행 차량의 통행을 공간적으로 분리하는 전용차로 운영 방안이 고려되고 있다.
기술이 발전하여 커넥티드 자율주행 차량이 상용화된다면 브랜드나 차종 구별 없이 대형트럭이 아닌 CAV도 군집주행을 이룰 것이다. CAV가 도로 내 도입되어 새로운 혼합 교통류를 구성하면 혼합 교통류 내 CAV 간 군집주행을 고려하여 새로운 교통 특성을 보일 것이다. 이러한 특성을 이해하고 최적의 교통운영 전략을 제시하는 것이 군집주행이 가능한 CAV가 도입된 미래의 고속도로 혼합 교통류를 효율적으로 운영 및 관리하는 하나의 방안을 마련해 줄 것이다. 본 연구에서는 혼합 교통류의 메커니즘을 이해하기 위해 교통 기본도(Fundamental Diagram) 이론을 활용한 수학적 모델을 도출한다. 이를 기반으로 연속류 다중차로 상황에서 혼합 교통용량을 최대화하여 도로 성능을 향상하는 최적화 프레임워크를 제시한다. 차량 종류에 따른 네 개의 차량추종(Car-following) 시나리오를 제시하고 시나리오별 군집주행을 고려한 확률적 차간 거리 변화에 초점을 맞춘다. 수치 예제를 통해 전체 CAV 혼입률(Penetration rate)에 따라 교통용량을 최대화하는 차로별 CAV 혼입률을 결정하고 이를 바탕으로 혼합 교통류 내 새로운 전용차로 최적 운영 방안을 제안한다.
선행연구
본 연구에서는 커넥티드 자율주행차의 기술 및 도입 효과에 관한 연구와 자율주행차 전용차로 관련 연구를 고찰하였다. 선행연구의 연구분석 방법론, 평가지표 등을 살펴보고 본 연구의 차별성을 도출하였다.
1. 커넥티드 자율주행차의 도입 효과에 관한 연구
앞서 살펴본 CAV의 차량협력기반 순항제어장치, CACC(Cooprative Adaptive Cruise Control) 또는 군집주행 기술을 통해 CAV의 도입은 교통용량을 증가시키고 교통 혼잡의 문제를 해결하는 등 여러 방면에서 긍정적인 영향을 미칠 것으로 보인다. 따라서, CAV의 도입이 혼합 교통류에 미치는 영향을 조사하는 연구가 다양하게 진행되고 있다. 특히, 혼입률에 따른 혼합 교통류의 용량 및 흐름 안정성의 변화에 초점을 맞추었다.
Shladover et al.(2012)는 기존 고속도로 네트워크에 적응형 순항제어장치, ACC(Adaptive Cruise Control)과 CACC 기술이 내장된 차량의 도입이 교통용량에 미치는 영향을 관찰하였다. 실제 데이터 기반의 시간 간격 분포를 활용하여 미시적 시뮬레이션을 수행하였다. 연구 결과, ACC의 도입은 교통용량에 큰 영향을 끼치지 않고 CACC의 도입은 일정 혼입률에 도달할 때까지 교통용량이 매우 증가하는 효과를 보였다.
Arnaout and Arnaout(2014)는 다중 차로 고속도로 시스템에서 CACC 내장 차량의 도입에 따른 교통 흐름의 변화를 분석하였다. 본 연구에서는 고속도로 내 혼합 교통류을 구현할 수 있는 새로운 미시 교통 시뮬레이션인 F.A.S.T(Flexible Agent-based Simulator of Traffic)가 제시되었다. 실험 결과, 기존 시나리오와 비교하여 CACC 내장 차량의 도입이 더 나은 교통 흐름 성능과 큰 용량을 나타내는 것을 알 수 있었다.
Lioris et al.(2017)은 CAV의 군집주행 기술이 교차로 내 잠재적인 이동성을 향상함을 검증하였다. 본 연구는 세 가지 대기행렬 모델을 활용하여 포화교통류율을 추정하고 PointQ라는 메조스코픽 시뮬레이터를 통해 로스앤젤레스 도로 네트워크에 대한 사례 연구를 제시하였다. 군집주행을 하는 CAV의 도입은 교차로의 교통용량을 2배 이상 증가시키고 대기열을 감소시키는 효과를 보였다.
Ye and Yamamoto(2018a)는 CAV가 교통 흐름에 미칠 수 있는 영향을 연구하기 위해 새로운 교통 흐름 모델을 개발하였다. 2차로 고속도로에서 TSM(Two-state Safe-speed Model)과 CA(Cellular Automation) 모델이 고려되었으며, 다양한 CAV 혼입률 아래 시뮬레이션이 수행되었다. 30%의 혼입률까지 교통용량이 점진적으로 증가하였고 그 이상의 혼입률부터 CAV의 성능에 따라 다른 결과를 보였다. CAV 혼입률과 교통용량 간의 관계를 수치적으로 분석하여 CAV 도입 효과에 대한 통찰력을 제공하였다.
2. 자율주행차 전용차로에 관한 연구
도로 내 모든 차량이 CAV로 대체되기까지 기존 차량과 CAV가 공존하는 혼합 교통류가 발생할 것이다. 따라서, CAV와 CAV가 아닌 차량의 교통류 특성을 분리하여 운영하는 자율주행차 전용차로 관련 연구가 다양하게 진행되고 있다.
Talebpour et al.(2017)은 자율주행차 전용차로 도입 효과를 2차로의 가상 고속도로와 시카고의 실제 고속도로를 대상으로 분석하였다. 각기 다른 CAV 혼입률에서 자율주행차 전용차로 운영 방식에 따른 시나리오를 구성하였다. 혼입률 30% 이상에서 전용차로 시스템이 교통용량을 증가시키는 것으로 나타났으나 기존 차로 수가 감소하여 교통 혼잡이 발생하는 경우도 확인되었다. 최종적으로 일반차로와 전용차로를 선택적으로 사용하는 시나리오가 혼입률 30% 이상일 때 교통혼잡도 줄이고 교통 흐름의 안정성에 크게 기여하는 것으로 파악되었다.
Ivanchev et al.(2017)은 자율주행차 전용차로 도입의 장단점을 조사하기 위해 싱가포르의 실제 교통 데이터 기반 거시적 시뮬레이션을 수행하였다. 자율주행차 전용차로가 한 차로에 할당될 때 발생하는 평균 통행 시간, 연료 소비량, 도로 사용량의 변화를 분석하였다. 전용차로가 포화되기 전에 CAV의 도입은통행 시간과 연료 소비에 긍정적인 영향을 보임과 동시에 통행 가능한 차로 수의 감소로 기존 차량을 지연시키는 결과를 보였다.
Ma and Wang(2019)는 CA(Cellular Automata) 모델을 활용하여 CAV 전용차로의 최적 운영 방안을 설계하였다. 4차로 고속도로를 대상으로 CAV 전용차로 운영에 따라 시나리오를 구성하였고, CAV는 일반차로도 이용 가능하다고 가정하였다. CAV 혼입률 40% 이하에서는 전용차로가 1개, 90% 이하에서는 2개를 운영하는 것이 효과적이었다. 본 연구는 특히 시뮬레이션 결과를 CAV 혼입률에 따라 연속류의 밀도(Density, veh/km)와 교통용량(Flow, veh/hr)을 측정하여 교통 기본도로 나타내었다.
Ye and Yamamoto(2018b)는 3차로 고속도로를 대상으로 CA 모델을 적용한 CAV 전용차로 도입 효과를 분석하였다. 혼입률, 전용차로 수, 차두 시간(Headway)를 구분하여 시나리오를 설계하였고, 밀도와 교통용량의 관계를 수치적으로 조사하였다. 낮은 CAV 혼입률에서 CAV 전용차로의 도입은 오히려 좋지 못한 결과를 보였고, 혼입률이 증가할수록 운영에 필요한 전용차로 수도 증가하였다. 혼합 교통류 내 CAV 전용차로 도입 효과 분석을 통해 최적 CAV 전용차로 운영 방안을 모색하였다.
3. 본 연구의 차별성
지금까지 CAV의 도입 효과 및 CAV 전용차로의 최적 운영 계획에 관한 연구는 주로 연속류 내 시뮬레이션을 기반으로 수행되었으며, 혼합 교통류를 수학적 모델링을 통해 분석적으로 이해한 연구는 소수에 불과하다. 예를 들어, Zhou and Zhu(2020)은 HDV와 CAV의 교통 시스템에 대한 교통 기본도를 도출하였다. 4가지 유형의 차두 시간 분포를 고려하여 혼합 교통류의 이질성과 확률성을 파악하였다. 그러나, 전용차로 운영을 고려하지 않은 단일차로 또는 다중차로 고속도로의 흐름만을 조사하였다,
본 연구에서는 HDV 및 CAV 전용차로의 다양한 운영 방식을 적용하기 위해 다중차로 고속도로의 혼합 교통류를 조사한다. 연속된 두 CAV는 군집주행 기술을 통해 좁은 차간 거리를 유지함을 통해 연속된 두 차량의 종류에 따라 4가지 유형의 차간 거리를 정의한다. 이를 활용하여 교통용량을 결정하는 교통 기본도 이론 기반 수학적 모델링을 수행한다. 또한, 다중차로의 교통용량을 최대화하여 도로 성능을 향상하는 최적화 프레임워크를 제안하고, 이를 통해 특정 전체 CAV 혼입률에서 최적의 차로별 CAV 혼입률을 결정할 수 있다.
본 연구는 고도의 자율주행과 통신 기술이 탑재된 CAV의 혼합 교통류 내 최적 차로 운영 전략을 수립함으로써 향후 정책 입안자에게 좋은 이론적 자료를 제시할 수 있다. 머지않은 미래에 차량과 인프라의 기술 발전에 따라 특정 고속도로의 혼합 교통류를 효율적으로 관리하는 것은 중요 교통 문제 중 하나가 될 것이다. 본 연구는 다중차로 내 CAV 혼입률이 결정될 때, CAV를 별다른 제어 없이 어느 차로든 주행할 수 있게 운영하는 방법보다 HDV 또는 CAV 전용차로를 도입하여 최적으로 운영하는 방법이 고속도로 흐름을 향상시킬 수 있음을 보여준다. 또한, 본 연구에서 계산한 밀도와 교통용량은 혼합 교통류 상황에서 가질 수 있는 최대치(Upper bound)로 제시될 수 있다.
본 연구는 기존 시뮬레이션 기반 연구의 귀납적 결과를 보완하고, 교통 이론에 기반하여 혼합 교통류를 분석한다. 정책 입안자는 본 연구의 최적화 프레임워크를 활용하여 기술 발전에 따라 변동되는 CAV 혼입률, 차간 거리 등을 운영하고자 하는 교통 시스템에 쉽게 적용할 수 있다.
혼합 교통류의 교통용량: 교통 기본도 관점으로
앞서 우리는 HDV와 CAV가 혼합된 대의 차량이 있는 단일차로 고속도로를 살펴보았다. 이 중 CAV의 수를 로 정의하면, 혼입률 는 전체 차량과 CAV의 비율()로 정의할 수 있다. 가 0이라면 차로에 CAV가 전혀 없는 상황()을 의미하고 가 1이라면 차로 내 전체 차량이 CAV인 상황()을 의미한다. 우리는 HDV와 CAV가 무작위로 배열되며 주어진 특정 혼입률은 고정값이라고 가정한다.
본 연구에서 ‘차간 거리’는 연속된 두 차량에서 선행 차량의 후면과 후행 차량의 범퍼까지의 간격을 의미한다. 우리는 선행연구를 토대로 혼합 교통류 내 연속된 두 차량의 조합에 따라 4가지 유형의 차간 거리를 새롭게 제시한다(Ghiasi et al., 2017; Li et al., 2020; Zheng et al., 2020; Zhou and Zhu, 2020). HDV와 HDV 사이 차간 거리를 , HDV와 CAV 사이 차간 거리를 , CAV와 HDV 사이 차간 거리를 , CAV와 CAV 사이 차간 거리를 로 정의한다. 본 연구는 혼합 교통류 내 두 대 이상의 CAV가 연속하여 운행하면 군집을 형성하여 다른 유형보다 더 좁은 차간 거리를 형성할 수 있음에 초점을 맞추었다(). 거시적 분석을 위해 유형별로 평균 차간 거리를 고려하며 운전자 특성, 가감속 성능, 반응 시간 등 차량간 미시적 상호작용은 거시적 변수로 집계된다고 가정한다(Ghiasi et al., 2017). 또한, 차로 변경과 같은 측면 이동은 고려하지 않았다. 연구의 간단한 접근을 위해 CAV가 연속되지 않은 유형의 평균 차간 거리를 모두 동일하게 로 간주하고, 군집주행으로 인해 단축된 CAV 간의 평균 거리는 로 정의한다.
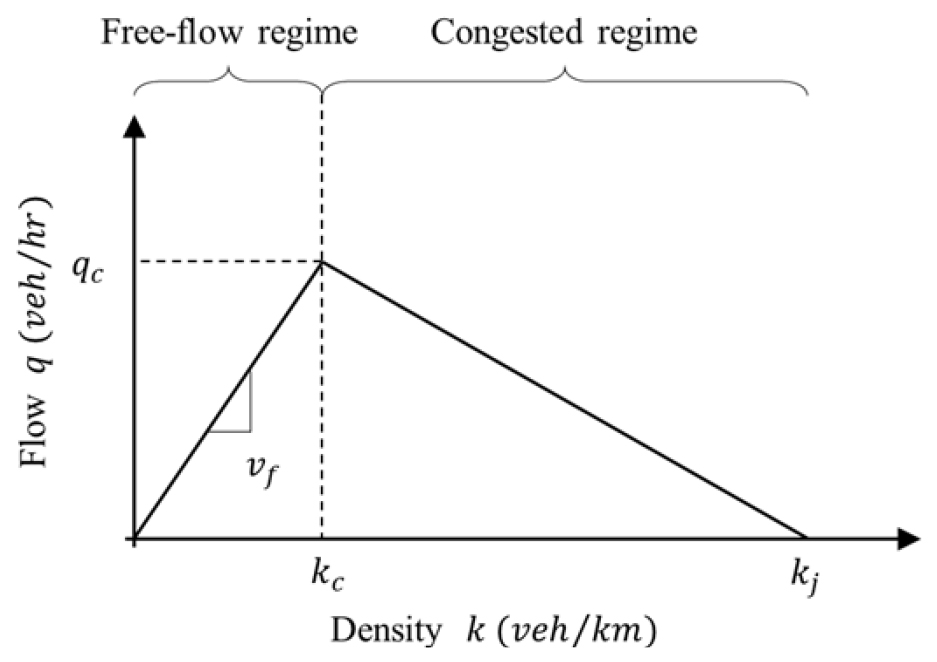
교통 기본도는 교통용량(veh/hr), 밀도(veh/km), 속도(km/hr) 간의 관계를 나타내는 거시적 모델이다. 본 연구는 HDV와 CAV의 혼합 교통류를 분석하기 위해 교통 기본도 개념을 활용한다. HDV와 CAV의 자유 흐름 속도는 제한된 최대 속도로 일정하게 유지되며 교통 기본도 형태는 삼각형이라고 가정한다(Levin and Boyles, 2016; Ye and Yamamoto, 2018b; Zhou and Zhu, 2020). 교통 기본도를 살펴보면 자유 흐름 영역(Free-flow regime)과 혼잡 영역(Congested regime)으로 구분된다. 자유 흐름 영역에서 모든 차량은 정상 상태 가정에 따라 자유 흐름 속도 로 이동하며 이 영역에서 교통용량과 밀도는 Equation 1과 같은 선형적 관계를 보여준다. 혼잡 영역에서는 밀도에 따라 속도와 교통량이 감소한다. 임계밀도(Critical density) 는 모든 차량이 최소한의 안전 간격을 유지하며 자유 흐름 속도로 주행할 수 있는 최대 밀도를 가리키며, 혼잡밀도(Jam density) 는 모든 차량이 교통 혼잡으로 인해 움직이지 않는 밀도를 의미한다. 본 연구에서는 특정 차로의 최대 교통용량을 그 차로의 발생 가능한 임계밀도의 교통용량 로 정의한다. 연구에서 활용한 교통 기본도 모델은 Figure 1로 표현할 수 있다.
혼합 교통류에서 연속된 CAV는 군집주행으로 더 큰 교통용량을 제공할 수 있어 연속된 CAV 쌍의 수를 파악하는 것이 중요하다. 차로 내 특정 차량이 CAV일 확률은 그 차로에 주어진 CAV 혼입률 와 같다. 바로 뒤따르는 후행 차량이 CAV일 확률 또한 CAV 혼입률 이다. 따라서 특정 연속된 두 차량이 모두 CAV일 확률은 각 차량이 CAV일 확률의 곱으로 이다(모든 사건이 독립사건이라 가정). 대의 차량이 있는 고속도로에서 CAV 혼입률이 일 때, 연속된 CAV 쌍의 개수는 , 그렇지 않은 유형의 차량 쌍의 개수는 가 된다. 또한, 대 차량이 이루는 대열의 길이는 모든 차량 쌍이 이루는 평균 차간 거리와 차량의 길이의 합으로 계산한다. 평균 차량의 길이를 로 정의하고 임계밀도 에서의 연속된 차량 사이 평균 차간 거리는 와 에 맞춰진다고 가정한다. 밀도는 총 차량 수를 전체 대열 길이로 나누어 계산하며 CAV 혼입률이 일 때의 임계밀도를 Equation 2와 같이 구한다. 또한 Equation 1을 통해 특정 혼입률이 주어진 혼합 교통 시스템의 최대 교통용량 을 선출한다(Equation 3).
우리는 Table 1에 제시된 매개변수를 이용하여 CAV 혼입률이 0부터 1까지 다양하게 적용된 혼합 교통류 시나리오를 구상하였다. 본 매개변수는 Ghiasi et al.(2017)와 Zhou and Zhu(2020)에서 제시된 차두 시간, 차량 길이, 자유 흐름 속도를 참고하였다.
다양한 혼입률에 따른 혼합 교통류의 교통 기본도를 통해 최대 교통용량 와 임계밀도 를 도출하여 Table 2에 나타내었다. CAV 혼입률이 증가할수록 최대 교통용량과 임계밀도가 점차 증가하고 증가 폭 역시 커지는 것을 확인할 수 있다. 혼입률이 0일 때의 최대 교통용량은 1,860(veh/hr), 1일 때의 최대 교통용량은 4,898(veh/hr)로 모든 차량을 CAV로 대체하면 교통용량이 약 2.6배 증가함을 알 수 있다.
Table 1.
Parameters for mixed traffic with HDVs and CAVs
| Parameters | HDV | CAV |
|
Spacing (inter-vehicle distance) and (m) | 60 | 20 |
| Vehicle length, (m) | 4.5 | |
| Free-flow speed (km/h) | 120 | |
Table 2.
Critical density and maximum traffic capacity with CAV penetration rate
다중차로 고속도로 혼합 교통류 최적 운영 방안
1. 최적화 프레임워크 설계
앞서 우리는 단일차로의 혼합 교통류의 특성을 파악하기 위해 교통 기본도 기반 수학적 모델링을 수행하였다. 다중차로의 혼합 교통류는 차로 변경과 같은 측면 이동과 차로별 속성을 복합적으로 고려해야 하는 어려운 문제이다. 본 연구에서는 주어진 전체 CAV 혼입률에 따른 차로별 CAV 혼입률을 결정하여 다중차로 고속도로의 교통용량을 최대화하는 최적화 프레임워크를 제안한다. 분석을 단순화하기 위해 차량이 특정 차로에 진입하면 퇴장하기 전까지 차로 변경을 하지 않는다고 가정하고, 다중차로 고속도로의 전체 용량은 모든 차로의 용량의 합이라고 가정한다.
최적화 문제를 수식으로 표현하면 목적함수(Equation 4)와 제약조건(Equations 5, 6, 7)로 나타낼 수 있다. 고속도로의 차로 수는 이며, 로 인덱싱한다. 각 차로에 진입하는 차량 분포에 따라 차로별 CAV 혼입률 (-번째 차로의 CAV 혼입률)이 결정된다. -번째 차로의 교통용량은 CAV 혼입률 의 함수, 로 표현된다. 최적화 문제의 목적은 혼합 교통류의 전체 CAV 혼입률 이 주어졌을 때 다중차로 고속도로의 전체 교통용량 을 최대화하는 것으로 각 차로의 교통용량의 합을 최대화하는 것과 일치한다. 본 최적화 문제는 각 차로에 진입한 CAV 수의 합이 전체 시스템에 도입된 CAV 수와 같아야 한다는 중요한 제약조건을 가지고 있다. 이는 각 차로의 차량 수의 합에 전체 CAV 혼입률을 곱한 값이 차로별 혼입률과 차량 수의 곱을 모두 더한 값이랑 일치해야 하는 Equation 6으로 나타낼 수 있다. 제시된 최적화 프레임워크를 통해 다중차로 혼합 교통류의 최대 교통용량을 위한 차로별 CAV 혼입률을 결정할 수 있다. 이는 다중차로 고속도로 환경에 특정 CAV 혼입률이 주어졌을 때, CAV를 효율적으로 배치하는 새로운 운영 전략에 방향을 제시할 것이다.
제시된 최적화 프레임워크와 비교하기 위해 모든 차로에 CAV가 균일하게 도입되는 디폴트 시나리오를 제안한다. 이 시나리오에서는 차로별 CAV 혼입률이 전체 시스템의 혼입률과 같은 값을 가진다(). 디폴트 시나리오의 최대 교통용량은 로 나타내며 Equation 8과 같이 계산한다.
2. 수치 예제 분석 – 이중 차로 고속도로 혼합 교통류
우리는 전체 CAV 혼입률의 변화에 따른 다중차로 고속도로 내 차로별 CAV의 최적 배치를 결정하기 위해 수치 예제 분석을 수행하였다. 이중 차로 고속도로 혼합 교통류를 고려하였으며 단일차로 고속도로 예제에서 제시된 매개변수(Table 1)를 동일하게 활용하였다. 최적화 문제를 해결하기 위해 Python 프로그램의 ‘scipy’ 라이브러리를 사용하였다. 계산 시간은 평균 약 8초 정도 소요되었다.
2차로 고속도로 혼합 교통류 시스템은 인 경우이며 우리는 차로별 CAV 혼입률 과 를 제어할 수 있다. 앞서 제시한 일반적인 최적화 프레임워크를 이중 차로 고속도로 혼합 교통류에 적용하여 다음과 같은 수식을 얻었다(Equations 9, 10, 11, 12, 13). 마찬가지로 이중 차로 고속도로의 디폴트 시나리오 교통용량은 Equation 8을 통해 구하였다(Equation 14).
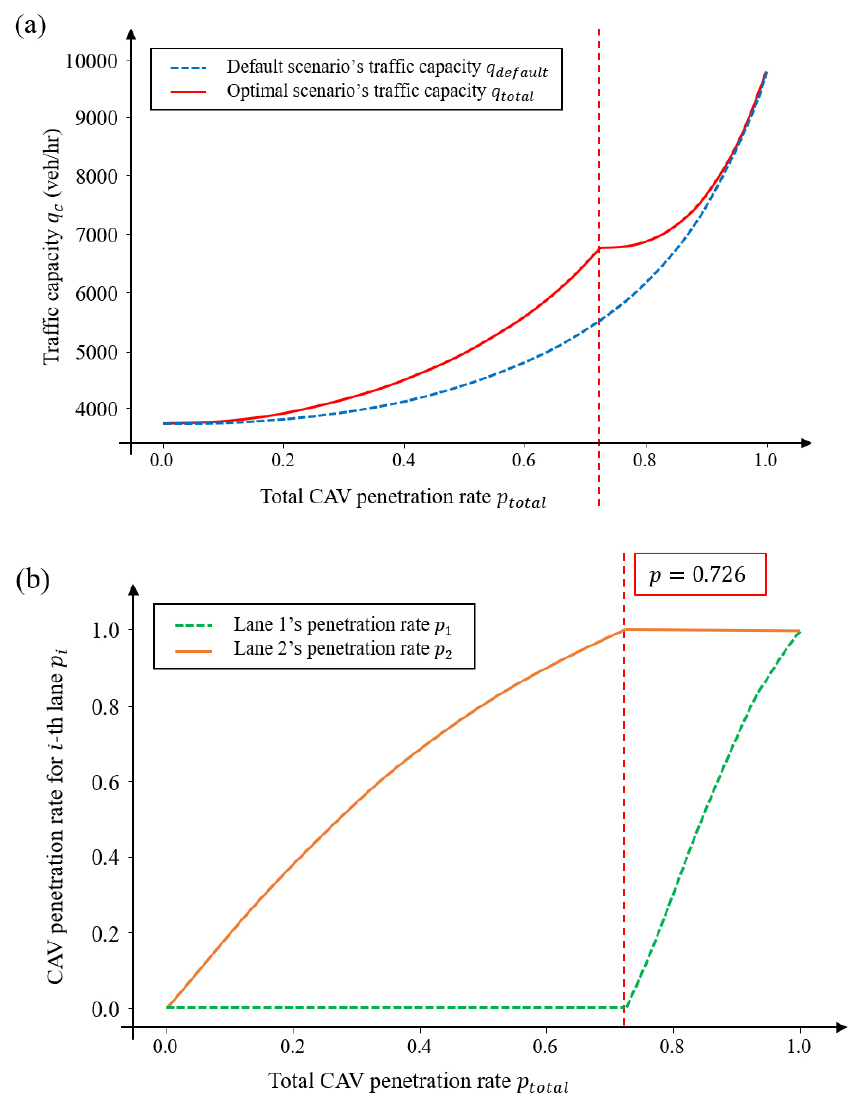
Figure 2는 이중 차로 고속도로 혼합 교통류의 수치 예제 분석 결과이다. Figure 2(a)는 본 연구에서 제시된 최적화 프레임워크를 통해 구한 최적(최대) 교통용량과 디폴트 시나리오의 교통용량을 혼입률에 따라 얻은 그래프이며, Figure 2(b)는 주어진 혼입률에 따른 차로별 CAV의 혼입률 변화를 나타낸 그래프이다. 이를 통해 이중 차로 고속도로의 교통용량을 최대화하기 위해선 각 차로에 전체 CAV 혼입률에 맞춰 일정한 비율로 CAV를 도입하는 시나리오(디폴트 시나리오)보다 하나의 차로부터 CAV를 도입하는 시나리오가 더욱 효율적이라는 결과를 얻었다. Figure 2(b)를 보면 전체 CAV 혼입률이 임계값인 0.726이 되기 전에는 첫 번째 차로의 혼입률은 0으로 고정되고 두 번째 차로의 혼입률만 증가한다. 임계값 이상일 때는 두 번째 차로의 혼입률이 1로 고정되고 첫 번째 차로에 CAV가 도입되기 시작한다. 이에 맞춰 전체 교통용량을 분석해보니, 최적화 기반 시나리오가 디폴트 시나리오보다 큰 교통용량을 도출하였다. 특히, 임계값에서는 약 22.3% 큰 교통용량을 선보였다. 연구에서 언급되는 첫 번째 차로, 두 번째 차로는 전체 CAV 혼입률에 변경되는 차로별 CAV 도입 방법을 나타내기 위해 구분한 것으로 1차로와 2차로를 의미하는 것이 아니다. 특정 CAV 혼입률에서 1차로 또는 2차로 중 어느 차로로 CAV가 도입되는 것이 최적인지에 관한 연구는 추후 논의가 필요하다.
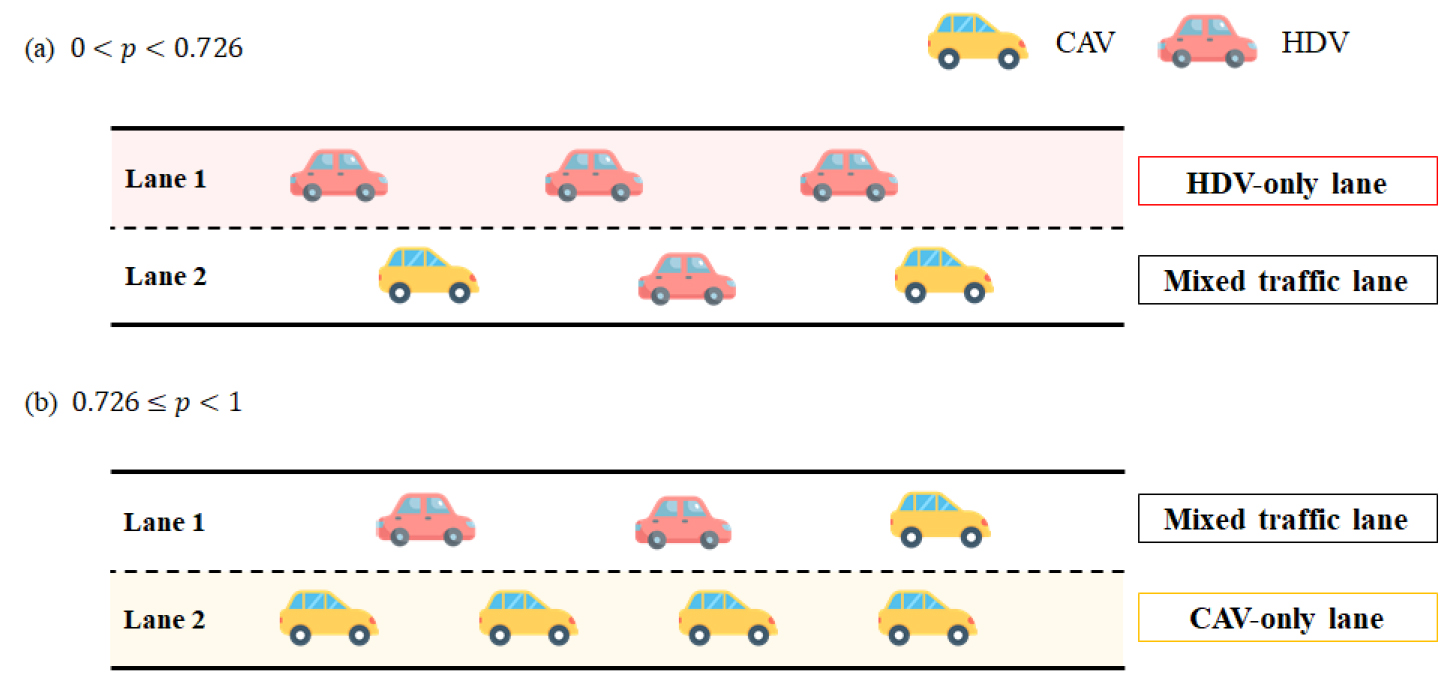
우리는 분석 결과를 토대로 이중 차로 고속도로 혼합 교통류 내 최적의 교통운영 방안을 제시하였다. 교통용량을 최대화하기 위해선 Figure 2에 제시된 임계값()을 기준으로 새로운 CAV 도입 방안(전용차로 운영전략)을 모색할 수 있었다. 전체 CAV 혼입률에 따라 CAV가 진입할 수 없는 HDV 전용차로와 CAV만 진입할 수 있는 CAV 전용차로를 이중 차로 고속도로에 적용할 수 있다. 임계값 이전에는 첫 번째 차로를 HDV 전용차로로 지정하고 다른 차로를 HDV와 CAV가 모두 사용하는 전략이 최적이다. 임계값 이후에는 두 번째 차로를 CAV 전용차로로 지정하고 첫 번째 차로를 혼합 교통을 위해 활용하는 전략이 최적이다. 본 연구에서 제시하는 HDV와 CAV의 최적 전용차로 운영전략을 도식화하면 Figure 3로 나타낼 수 있다.
3. 민감도 분석
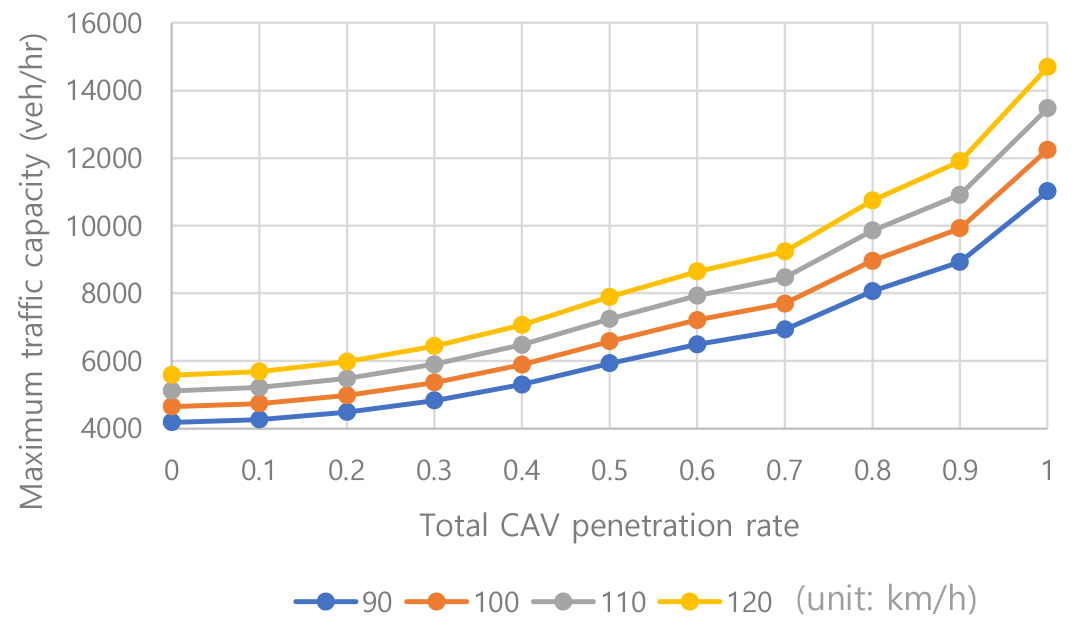
우리는 수치 예제 분석의 중요 변수인 연속된 CAV 사이의 차간 거리 와 자유 흐름 속도 에 대하여 민감도 분석을 진행하였다. 연속된 CAV의 차간 거리는 20, 30, 40, 50(m)으로 설정하고 전체 CAV 혼입률에 따라 제시된 방법론으로 구한 최대 교통용량을 비교하였다. 마찬가지로 자유 흐름 속도는 90, 100, 110, 120(km/h)으로 설정하였다. 연속된 CAV의 차간 거리에 대한 민감도 분석 결과는 Table 3과 Figure 4로 나타내었다. 동일한 조건에서 연속된 CAV의 차간 거리가 좁아질수록 CAV 혼입률에 대해 최대 교통용량이 크게 증가하였다. 예를 들어 CAV 혼입률이 0.9에서 1로 증가할 때, 연속된 CAV의 차간 거리가 50m인 경우는 약 3%가 증가하였지만, 20m인 경우는 약 23%가 증가하였다. 자유 흐름 속도에 대한 민감도 분석 결과는 Table 4와 Figure 5로 나타내었다. 최대 교통용량은 Equation 5에서 알 수 있듯이 자유 흐름 속도에 선형적으로 비례하기 때문에, 속도 크기에 따라 다를 뿐 CAV 혼입률에 따른 증가율은 모두 일정하였다. 향후 연구에서 화물차 등 다양한 차량 종류 및 비율, 차로 변경 횟수 등 다양한 변수가 추가되면 그에 따른 민감도 분석을 추가로 진행할 수 있다.
Table 3.
Sensitivity analysis of spacing between CAVs for the total CAV penetration rate
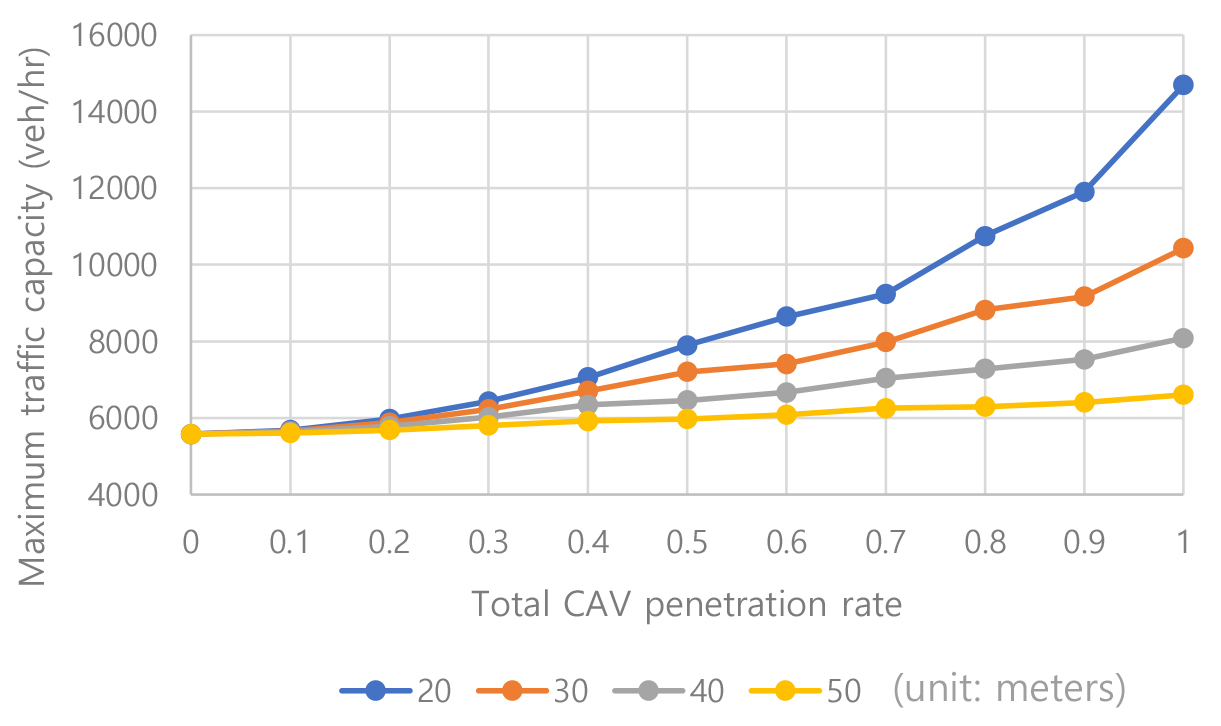
Table 4.
Sensitivity analysis of free-flow speed for the total CAV penetration rate
결론
본 연구를 통해 우리는 차로별 CAV 혼입률과 CAV의 군집주행을 제어하여 다중차로 고속도로 혼합 교통류의 교통용량을 최대화하는 최적화 프레임워크를 제안하였다. 이를 위해 단일차로 혼합 교통류 내 CAV 혼입률에 따른 교통용량 변화를 교통 기본도를 통해 조사하였다. 제시된 수학적 모델을 활용하여 다중차로 혼합 교통류 내 최적의 CAV 도입 운영 방안을 모색하였다. 이중 차로 고속도로 수치 예제를 통해 전체 교통용량을 최대화하는 차로별 CAV 혼입률을 결정하였다. 분석 결과, 전체 CAV 혼입률이 증가함에 따라 특정 차로부터 다른 차로로 CAV를 순차적으로 할당하고, 결정된 차로별 혼입률에 따라 HDV 또는 CAV 전용차로를 도입하는 것이 최적의 운영 방안임을 확인하였다.
본 연구의 한계를 극복하기 위한 향후 연구로는 다음과 같다. 첫 번째, 본 연구는 차로에 차량이 진출할 때 측면 이동을 하지 않는다고 가정하였다. 다중차로 고속도로 내 유동적인 CAV 도입을 위해선 차로 변경 및 진입로의 합류 등의 측면 이동을 고려해야 한다. 이러한 측면 이동은 차로별 차량 분포는 물론, 교통용량과 운영전략에 큰 영향을 미칠 것이다. 따라서, 향후 연구를 통해 HDV와 CAV의 측면 이동을 분석하고 이를 고려하여 최적화 프레임워크를 설계할 예정이다. 두 번째, 본 연구는 CAV 군집주행을 고려한 혼합 교통류의 수학적 분석 모델을 제시하기 위해 발생 가능한 다양한 요인들을 생략하였다. 향후 연구에서는 실제 데이터를 기반으로 반응 시간에 따른 차간 거리, 평균 자유 흐름 속도, 다양한 차량 종류 및 비율, 진·출입로의 유무 등을 고려하여 더 현실적인 결과를 얻을 수 있을 것이다. 또한, 각 요인에 따른 민감도 분석을 수행하여 예측하지 못한 혼합 교통류 상황 변화를 예상할 수 있다. 세 번째, 본 연구에서는 교통용량을 최대화하는 최적 차로 운영 전략을 임계값을 도출함으로써 제시하였으나 어느 차로로 CAV를 상황에 맞게 도입해야 하는지에 관한 연구는 진행되지 않았다. 다중차로 고속도로 혼합 교통이 실제로 이루어지려면 HDV 또는 CAV 전용차로를 어느 차로에 운영하는지 파악하는 것이 중요하다. 따라서 향후 연구로 실제 데이터를 수집하여 차로별 특성을 분석하고 시뮬레이션 등을 활용하여 최적 전용차로 운영 전략을 새롭게 도출할 수 있는 방법론을 제시할 것이다. 네 번째, 본 연구는 교통용량을 최대화하는 것을 목적함수로 두어 최적화 프레임워크를 설정하였지만, 돌발 상황을 고려하거나 교통체증 완화, 환경 개선 및 비용 감소 등 다양한 목적을 혼합 교통류 문제에 적용할 수 있다. 또한, 도로의 구조나 차량의 속도 등 새로운 변수가 고려된 수학적 모델링을 설정하여 보다 구체적인 혼합 교통류 모델을 제시할 수 있다. 다섯 번째, 본 연구에서는 이중 차로 고속도로의 수치 예제만을 분석하였다. 향후 연구로 삼중, 사중 차로 등 더 복잡하고 확장된 고속도로 시스템의 혼합 교통류의 수치 예제 분석을 진행할 것이다.
본 연구는 커넥티드 자율주행 자동차가 다양한 혼입률에 따라 도입된 다중차로 고속도로 시나리오를 교통 이론을 기반으로 모델링하고 분석하는 데 의의가 있으며 교통용량을 최대화하는 최적의 CAV 도입 운영 방안을 제시한다. 이는 CAV 혼입률이 주어진 고속도로 시스템에서 정책 입안자가 최적의 전용차로 운영 방안을 탐색할 때 참고할 수 있는 이론적 모델이 될 것이다.
