

서론
기존연구고찰
1. 시뮬레이션 내 자율주행차 거동 구현 관련 연구
2. 시뮬레이션 기반 단속류 혼재교통상황 주행안전성 관련 연구
3. 기존 연구와의 차별성
분석방법론
1. AVD 수집 및 처리
2. 도로 위험구간 정의
3. 자율차 거동 구현 및 시뮬레이션 수행
4. 최적지표 도출 방법
분석 결과
1. Real-world 데이터 활용한 주행행태 분석
2. 주행행태 분석 결과 기반 VISSIM 파라미터 조정
3. 시뮬레이션 기반 주행안전성 최적지표 도출 결과
결론 및 향후 연구과제
서론
자율주행차의 도입으로 인해 주행행태가 서로 다른 자율주행차와 비자율주행차가 혼재되어 도로를 주행하는 혼재교통상황이 발생하였고 장기간 지속될 것이다(Xu et al., 2021; Garg et al., 2023). 비자율주행차에 비해 보수적인 주행행태를 보이는 자율주행차가 혼재된 교통상황은 교통사고의 심각도와 빈도를 증가시키는 문제를 초래할 수 있다(Chen et al., 2023; Arvin et al., 2020; Lee et al., 2018a). 따라서, 이러한 문제를 예방하기 위한 대응책 마련을 위해서는 혼재교통상황에 대한 선제적 안전성 분석이 필요하다. 그러나, 실도로의 주행데이터 부족으로 인해 대부분의 연구가 가상환경 기반으로 수행되고 있다. 대표적인 가상환경 기반의 교통류 시뮬레이션인 VISSIM은 사람운전자 관점에서 개발됨에 따라 자율주행차 거동에 대한 구현이 필요하므로 실제 자율주행차의 주행행태를 분석하여 현실적인 자율주행차 거동을 시뮬레이션 상에 구현할 필요가 있다(Park et al., 2017).
실제 교통량, 신호현시, 도로 기하구조 등 현실적인 교통조건이 반영된 시뮬레이션 환경일지라도 현실의 교통상황을 완벽하게 재현하지 못한다는 한계가 존재하므로 시뮬레이션의 결과와 실도로 결과의 비교를 통해 시뮬레이션 결과를 검증할 필요가 있다. 또한, 시뮬레이션 환경에서 활용가능한 다양한 주행안전성 평가지표 중 실제 도로위험상황을 효과적으로 설명할 수 있는 최적의 주행안전성 평가지표 선정이 요구된다. 따라서 본 연구의 목적은 실제 자율주행차 주행행태를 VISSIM 환경의 자율주행차 거동에 구현하고 시뮬레이션 및 실도로 기반 위험구간 간의 비교를 통해 실제 주행안전성을 효과적으로 나타낼 수 있는 시뮬레이션을 위한 최적 평가지표를 도출하는 것이다. 본 연구에서는 상암 자율주행차 시범운행지구에서 주행하는 자율주행차의 데이터를 수집하여 주행행태 분석을 수행하였다. 동일한 자율주행차의 데이터를 활용하여 감속도 기반 위험 발생 비율을 나타내는 지표인 automated driving risk index(ADRI)를 산출하고 실도로 위험구간을 정의하였다. 실도로 위험구간을 시뮬레이션 환경 내 유사한 구간으로 나타내는 최적의 평가지표를 선정하기 위하여 의사결정나무(Decision Tree, DT) 분석을 활용하였다. 주행행태가 반영된 시뮬레이션의 주행안전성 평가지표를 입력변수로 설정하고 ADRI 기반 위험구간을 출력변수로 설정하여 의사결정나무 분석을 수행하였다. 본 연구에서 도출한 최적지표 기반 상위 위험구간 3곳을 도출하여 각 구간의 도로 특성을 제시하였다. 본 연구의 결과는 시뮬레이션 기반 주행안전성 분석의 평가지표 선정 시 활용될 수 있을 것으로 기대된다.
본 연구의 구성은 다음과 같다. 2장에서는 시뮬레이션에 자율주행차의 거동을 구현한 기존 연구를 고찰하였으며 본 연구를 위한 시사점을 도출하였다. 3장에서는 시뮬레이션 기반 최적지표 도출을 위한 방법론을 제시하였다. 4장에서는 실제 자율주행차 주행행태를 적용한 시뮬레이션을 통한 의사결정나무 기반 최적평가지표 도출 결과를 서술하였으며, 마지막 장에서는 본 연구의 결론 및 향후 연구과제를 서술하였다.
기존연구고찰
본 연구는 실제 주행 중인 자율주행차의 주행행태를 분석하여 시뮬레이션에 자율주행차 거동을 구현하고 시뮬레이션 기반 혼재교통상황의 주행안전성 최적지표를 도출하는 것을 목표로 한다. 이와 관련하여 교통류 시뮬레이션에 자율주행차의 거동을 구현한 연구를 고찰하였으며, 시뮬레이션 기반 혼재교통류에서의 주행안전성을 분석한 연구를 고찰하였다. 고찰한 기존 문헌과 본 연구와의 차별점을 제시하였다.
1. 시뮬레이션 내 자율주행차 거동 구현 관련 연구
시뮬레이션에서의 차량의 거동 구현은 차량간 상호작용을 분석하는데 중요하다. 혼재교통상황의 지속기간이 길어짐에 따라 시뮬레이션에서의 자율주행차 및 비자율주행차의 거동을 구현하여 교통안전성 평가를 수행한 연구가 활발히 진행되고 있다(Garg et al., 2023). 자율주행차의 거동을 구현하기 위하여 wiedemann 99 차량추종모형의 CC0-CC9의 파라미터를 조정하였다(ALTurki et al., 2023; Osman, 2023). 자율주행차는 비자율주행차보다 인지반응시간이 빠르고 보수적으로 주행한다는 가정에 따라 자율주행차의 속도 분포 범위를 좁혀 적용한 것으로 보고하였다(Osman, 2023; Wang and Wang, 2017). 또한, 자율주행차는 사람 운전자보다 인지반응시간이 빠르고 전방차량의 1m까지 접근가능한 기능을 가정하여 차두거리를 조정하는 데 활용되었다(Gazder et al., 2020). El-Hansali et al.(2021)은 wiedemann 99 모형의 파라미터를 조정하였으며 google earth를 이용하여 평균 속도, 총 교통량을 수집하여 자율주행차의 거동을 조정하는 데 활용하였다. Calvert et al.(2020)은 실제 field operational test(FOT)의 데이터를 활용하여 신호교차로와 회전교차로의 시뮬레이션 환경을 구축하였다. FOT의 가속도 프로파일을 도출하였으며 이를 desired acceleration functions에 적용한 것으로 보고하였다. 또한 wiedemann 99 모형의 파라미터 중 CC1, CC7, CC8, CC9를 변경하여 자율주행차의 거동을 구현하였다. Wiedemann 99 모형이 wiedemann 74 모형보다 파라미터를 유연하게 조정할 수 있는 것으로 판단하여 연속류의 자율주행차 거동을 단속류 시나리오 구현에 활용하였다(Ansarinejad et al., 2023; Szarata et al., 2023; Morando et al., 2018). Mousavi et al.(2021)은 자율주행차의 시스템 보급률(Market Penetration Rate, MPR)에 따른 도시 간선도로의 운영 및 안전에 대한 영향을 평가하였다. 이때 자율주행차 거동은 wiedemann 74 모형의 파라미터를 조정하여 구현하였으며, 조정값은 PTV VISSIM에서 제시한 매뉴얼을 참고한 것으로 보고하였다.
2. 시뮬레이션 기반 단속류 혼재교통상황 주행안전성 관련 연구
시뮬레이션을 활용하여 혼재교통상황에서의 주행안전성을 분석하는 것은 선제적으로 교통안전성을 증진하는 데 중요한 요소가 될 수 있다. Lee et al.(2023)은 주행시뮬레이터를 활용하여 단속류의 도로를 구축하고 시뮬레이션을 통해 데이터를 수집하여 혼재교통상황의 주행안전성을 평가하였다. 또한 주행안전성이 저하되는도로 네트워크 요소를 도출하였으며 평가지표별, 시나리오별 주행안전성이 저하되는 도로 네트워크가 상이한 것으로 분석되었다. Wang and Wang(2017)은 시뮬레이션 환경에서 자율주행차의 종방향 주행모델에 대한 테스트를 수행하였다. 자율주행차의 거동은 “전방차량과의 거리 보장”, “딜레마존과 거리 유지”, “과속금지”의 3가지 규칙을 준수한다는 가정 하에 구현하였으며 네트워크는 단일로와 신호교차로로 구축하여 자율주행차와 비자율주행차의 주행행태를 비교분석하였다. Shahdah et al.(2014)은 자율주행차의 안전성 평가를 위하여 교차로의 관리기술을 개발하고 교통안전개선 대책의 효과를 추정하였다. 시뮬레이션을 활용하여 총 53개의 신호교차로를 구축하였으며 음이항모형으로 상충과 사고간의 통계적 관계를 분석하였다. Morando et al.(2018)은 교통안전대체지표를 활용하여 자율주행차 안전성에 미치는 영향을 분석하였다. 시뮬레이션을 활용하여 자율주행차의 혼입률별 신호교차로와 회전교차로에서의 주행안전성을 제시하였다. 교통안전대체평가지표는 Time-to-collision(TTC)를 선정하여 임계값에 차이를 두며 분석을 수행하였다. Severino et al.(2021)은 회전교차로에서 자율주행차의 혼입률에 따른 안전성평가 수행하였다. 시뮬레이션에도 도출된 결과로 SSAM 분석을 수행하여 상충 위험 및 교통성능을 분석하였다. 분석결과 자율주행차의 혼입률이 증가할수록 상충위험이 감소하고 통행속도 및 정지횟수가 개선되었다는 결과를 제시하였다.
3. 기존 연구와의 차별성
시뮬레이션을 활용한 혼재교통상황에서의 교통안전성에 대한 연구가 지속적으로 수행되고 있으나, 연구에 활용되는 시뮬레이션 내 자율주행차의 거동을 효과적으로 구현함에 있어 명확한 기준이 부재한 상황이다. 자율주행차의 거동을 효과적으로 구현하기 위해서는 실제 주행하는 자율주행차의 데이터 활용이 요구된다. 또한 시뮬레이션을 활용하여 단속류 혼재상황의 주행안전성을 분석한 연구는 많았으나, 연구 수행 시 선정한 평가지표에 대한 근거는 미흡하였다. 따라서 본 연구는 자율주행차 시범운행지구에서 주행하는 자율주행차로부터 수집한 데이터 분석을 통해 시뮬레이션의 파라미터를 조정하고 자율주행차의 위험 주행이벤트를 효과적으로 표현할 수 있는 시뮬레이션 기반 평가지표를 도출하였다. 이를 위하여 해당 지역의 자율주행차 자료를 활용하여 보다 현실성 있는 시뮬레이션 기반 case study를 수행하였다. 시나리오와 적합한 파라미터를 선정하고 autonomous vehicle data(AVD)를 활용하여 자율주행차의 거동을 구현하였다.
분석방법론
본 연구는 상암 자율주행차 시범운행지구에서 운행되는 자율주행차량의 데이터를 활용하여 시뮬레이션 기반 혼합교통상황의 주행안전성 평가지표 중 최적지표를 도출하는 방법론을 개발하였으며, 연구흐름도는 Figure 1에 제시하였다. 먼저, Real-world 자율주행차로부터 수집된 데이터인 AVD의 주행행태 분석을 수행하고 실도로 위험구간을 정의한다. 교통 시뮬레이션 단계에서는 주행행태분석 단계에서 도출된 결과로 자율주행차 주행행태를 구현하였으며, AVD로 비자율주행차 주행행태를 반영하여 시뮬레이션을 수행한다. 교통 시뮬레이션 수행 후 주행안전성 평가지표 후보군을 선정한다. 마지막 단계에서는 실도로 위험구간과 유사한 시뮬레이션의 위험구간을 나타내는 최적지표 도출을 위하여 의사결정나무 분석을 수행한다. 앞서 선정한 주행안전성 평가지표 후보군을 입력변수로 설정하고 AVD 기반으로 식별한 위험구간과 일반구간을 출력변수로 설정하여 의사결정나무 모형을 구축한다. 구축된 모형을 통해 Real-world 데이터 기반 위험구간 분류에 있어 시뮬레이션의 최적 평가지표를 도출한다.

1. AVD 수집 및 처리
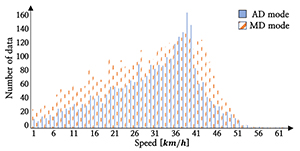
본 연구에서는 상암 자율주행차 시범운행지구에서 주행한 자율주행차로부터 수집된 AVD를 활용하였다. 상암 자율주행차 시범운행지구는 자율주행차가 정해진 노선을 순환하며 비자율주행차, 이륜차, 자전거, 보행자 등이 혼재된 교통환경이다. 수집된 AVD는 A01노선과 A02노선을 주행하는 총 5대의 자율주행차 주행 데이터이다. A01노선은 3대의 자율주행차가 주행하며 길이는 5.3km이다. 신호교차로 22개, 비신호교차로 2개를 포함하며 해당 노선에는 좌회전 3번, 우회전 7번이 수행된다. A02노선은 2대의 자율주행차가 주행하며 길이는 4.0km이다. 신호교차로 17개, 비신호교차로 2개를 포함하며 4번의 우회전이 수행되는 노선이다. 주행안전성 분석을 위해 자율주행차의 실증 운영시간을 기준으로 데이터를 추출하였으며, 시간적 범위는 2022년 8월 1일부터 10월 31일이다. AVD는 수집일시, 주행속도, 위도 및 경도, 주행모드를 포함하고 있으며, 이 중 주행속도를 활용하여 가속도 및 Jerk를 산출하였다. 분석 범위 내에서 서로 다른 주행모드인 자율주행모드(Autonomous Driving mode, AD mode)와 비자율주행모드(Manual Driving mode, MD mode)로 구분하였다. 또한, 도로법의 ‘도로와 다른 도로 등과의 연결에 관한 규칙’ 중 교차로 영향권 산정 기준에 따라 정지선으로부터 30m를 영향권 길이로 산정하여 교차로 영향권과 비영향권을 구분하였다(Ministry of Land, Infrastructure and Transport, 2005). 교차로 영향권의 경우, 교차로 진입 전 정지선으로부터 30m부터 교차로 진입 후 교차로 면적 이후부터 30m로 정의한다. 지도 상의 교차로 영향권에 대한 좌표를 수집하여 교차로 영향권 영역을 설정하였다. AVD에 포함된 위도 및 경도 데이터를 활용하여 교차로 영향권 영역을 기준으로 데이터를 구분하였다. 이와 같이 가공한 데이터를 활용하여 주행모드별 교차로 영향권 및 비영향권에 따라 차량의 주행행태 분석을 수행하였다.
2. 도로 위험구간 정의
본 연구에서는 Real-world 데이터를 활용하여 실제 도로의 위험구간을 정의하였다. 도로 위험구간 선정 시 수집한 상암 시범운행지구의 자율주행차 데이터를 모두 활용하였다. 위험을 판단하는 지표는 종방향 감속도 기반 돌발상황을 검지하는 지표인 autonomous emergency braking(AEB)를 활용하였다. 국제 표준인 ISO-22179에서 제안한 AEB 기능의 최대 감속도인 0.5g(4.9m/s2)를 초과하는 이벤트의 발생비율을 automated driving risk index(ADRI)로 정의하여 실제 도로 위험구간 선정 시 활용하였다(FSRA, 2009). 구간별 ADRI를 산출하여 전체구간 평균 ADRI보다 높은 구간을 위험구간, 그렇지 않은 구간을 일반 구간으로 정의하였다. 분석 구간은 주행행태 분석 시와 동일하게 교차로 영향권 산정기준을 따라 219개의 구간으로 구분하였다. 그러나 현행법상 AD mode로 주행이 불가능한 어린이 보호구역은 분석 구간에서 제외하여 총 186개의 구간을 분석에 활용하였으며, ADRI 기반 위험구간은 의사결정나무 분석 시 출력변수로 활용하였다. ADRI 산출식은 Equation 1에 제시하였다.
여기서, : 구간 의 AEB 기반 자율주행 위험 지수
: 구간 의 AEB 기반 위험 이벤트(건)
: 구간 의 AD mode 데이터 건수(건)
3. 자율차 거동 구현 및 시뮬레이션 수행
본 연구는 단속류 혼재교통상황에서 안전성 평가를 위하여 교통류 시뮬레이션인 VISSIM을 활용하였다. 단속류에 적합한 wiedemann 74모형에서 자율주행차의 거동을 조정할 수 있는 파라미터를 Table 1에 제시하였다(Rahman et al., 2019). 실제 자율주행차 주행행태 분석 결과를 활용하여 자율주행차 거동 조정이 가능한 파라미터는 distribution에 해당하는 3개의 파라미터이다. Desired speed distribution은 네트워크 링크 및 차량의 속도 분포를 조정하는 파라미터로 차량의 주행행태 및 도로의 속도 분포 결정 시에 활용한다. 또한 desired acceleration functions와 desired deceleration functions는 차량의 가·감속도 분포를 조정하는 파라미터이다. 본 연구에서는 주행모드별 가속도 및 감속도 분포 기반으로 차량의 주행행태를 조정한다. Car-following(CF) 및 lane change(LC) 파라미터의 경우, Table 1과 같이 Bhin et al.(2021)을 참고하여 적용하였다. Bhin et al.(2021)에서 MD mode는 default 값과 동일하게 설정하였으며, AD mode의 CF 파라미터 경우 Park et al.(2017), LC 파라미터의 경우 Lee et al.(2018b)을 참고하였다. CF 파라미터 조정 시 자율행차의 인지반응시간이 비자율주행차에 비해 빠르게 반응함에 따라 MD mode보다 additive part of safety distance를 0.5m, 25% 감소시켜 적용하였다. 또한 multiplicative part of safety distance는 0.5m, 약 16.67% 단축하여 설정하였다. LC 파라미터는 Lee et al.(2018b)의 자율주행적극성이 가장 높은 자율주행차의 파라미터를 적용하였다.
Table 1.
Driving behavior parameters for AD mode and MD mode maneuvering in VISSIM
| Division | Parameter | Unit | MD mode | AD mode |
| Distribution | Desired speed distribution | - | - | - |
| Desired acceleration functions | - | - | - | |
| Desired deceleration functions | - | - | - | |
|
Car-following* (Wiedemann 74) | Average standstill distance | 2.0 | 2.0 | |
| Additive part of safety distance | 2.0 | 1.5 | ||
| Multiplicative part of safety distance | 3.0 | 2.5 | ||
| Lane change* | Waiting time before diffusion | 60.0 | 60.0 | |
| Minimum headway (front/rear) | 0.5 | 0.2 | ||
| Safety distance reduction factor | 0.6 | 0.3 | ||
| Maximum deceleration for cooperative braking | -3.0 | -3.0 |
시뮬레이션의 분석 구간은 상암 자율주행차 시범운행지구의 A01노선과 A02노선으로 선정하였다. 분석 구간은 실제 자율주행차 위험구간과 시뮬레이션의 위험구간을 비교하기 위해 실제 자율주행차 분석 시 구분한 구간과 동일하게 설정하였다. 네트워크 구축 시, 교통량은 서울시 교통량 조사 자료의 일평균 교통량을 참고하였으며, 신호현시는 교차로별 실제 신호 현시 자료를 참고하여 설정하였다. 자율주행차량의 대수는 시범운행지구와 동일하게 A01노선에 3대, A02노선에 2대가 순환하도록 구축하여 시뮬레이션 총 10회를 수행하였다. A01노선의 1시간 동안 노선을 통과한 자율차 평균 대수는 42대이고 구간별 평균 통과 대수는 2대이다. A02노선의 1시간 동안 노선을 통과한 자율차 평균 대수는 73대이고 구간별 평균 통과 대수는 4대이다. 시뮬레이션은 warm-up 시간 30분과 시뮬레이션 수행시간을 1시간으로 설정하였다. 자율주행차 시범운행지구 노선 및 VISSIM 환경에서 구축한 네트워크는 Figure 2에 제시하였다.

4. 최적지표 도출 방법
분석 평가지표 선정 시 AVD에 포함된 속도, 가속도, jerk를 활용하여 산출가능한 주행안전성 평가지표 후보군을 Table 2에 제시하였다. 평가지표는 평균 속도, 속도 표준편차, 속도 기반 safety reliability indicator(SRI), 평균 가속도, 가속도 표준편차, 가속도 기반 SRI, 평균 jerk, jerk 표준편차, jerk 기반 SRI, peak-to-peak jerk를 활용하였다(Kim et al., 2021; Kim et al., 2023). SRI의 위험상황 판단 임계값 설정 시 85-percentile 값을 적용하였다(Ward and Schultz, 2023). 혼합교통상황의 안전성 평가를 위하여 시뮬레이션의 자율주행차 및 비자율주행차의 데이터를 모두 활용하였으며, 앞서 선정한 평가지표의 값을 산출하였다. 단속류는 stop and go가 빈번하게 발생함에 따라 정지한 상태를 제외한 데이터를 추출하였다. 또한, 시뮬레이션 결과의 219개의 구간을 실제 위험구간과 동일하게 어린이 보호구역을 제외한 186개 구간으로 선정하였으며 각 구간의 평가지표 값을 산출하였다.
Table 2.
Candidates driving safety indicators
본 연구에서는 시뮬레이션 자료에서 도출된 평가지표 후보들 중에서 실제 환경의 위험구간을 효과적으로 나타내는 지표를 선별해내기 위해 의사결정나무 분석을 수행하였다. 의사결정나무의 입력변수를 시뮬레이션 기반 평가지표로, 출력변수는 실제 도로 위험구간으로 설정하여 위험구간을 식별하는 데 큰 영향을 미치는 시뮬레이션 평가지표를 도출하였다. 의사결정나무는 머신러닝의 지도 학습에 해당되는 알고리즘 중 하나로 주어진 데이터를 특정 기준에 따라 의사결정 규칙을 나무구조로 도표화하여 분류(Classification)하거나 예측(Prediction)하는 분석방법이다. 의사결정나무 모형은 선형성이나 정규성, 등분산성 등의 가정을 필요로 하지 않는 비모수적 방법이다(Drazin and Montag, 2012). 직관적으로 이해하기 쉽고 주요 변수와 분리기준을 제시하여 결과 해석에 용이하다. 또한 어떤 설명변수가 가장 중요한 영향인지 판단하는 경우에 많이 사용한다는 장점이 있다(Park et al., 2011). 의사결정나무 구조를 형성하는데 있어 입력변수와 분류점을 결정하는 것이 중요하다. 입력변수와 분류점은 부모 노드의 불순도에서 자식노드의 불순도의 합을 뺀 값을 최대로 한다. 또한 나무 모형을 구축하는데 있어 나무의 크기를 결정하는 정지 규칙과 가지치기 방법은 중요한 부분이다. 정지규칙은 미리 지정한 조건에 해당될 때 나무의 성장을 정지시키는 방법이며, 가지치기 방법은 나무모형을 크게 만든 후 불필요한 가지를 제거하여 최적의 나무모형을 구축하는 방법이다(Kim et al., 2010). 따라서 과적합을 방지하고 적절한 크기의 나무를 선택하려면 최적의 매개변수, 즉 초매개변수(Hyper parameter)를 설정해야 한다.
본 연구에서는 분류를 위해 의사결정나무 모형을 구축함에 따라 분리기준을 선정하는 목적함수를 엔트로피 지수(Entropy Index)로 적용하였다. 정보의 불확실함 정도를 나타내는 엔트로피를 활용하여 산출하는 정보획득량(Information gain)을 변수 선택의 지표로 선정하였으며, 정보획득량은 데이터를 분류함에 있어 변수들의 상대적 중요도를 의미하는 값이다(Li et al., 2022). 정보획득량은 Equation 2의 산출식으로 산출가능하며, 정보획득량을 활용하여 상대적 중요도가 가장 높은 평가지표를 최적지표로 선정하였다. 또한 시뮬레이션 기반 주행안전성 평가지표를 입력변수로 설정하고 Real-world 데이터로 산출한 ADRI 기반 위험구간을 출력변수로 설정하여 의사결정나무 모형을 구축하였다. 본 연구에서는 실도로 위험구간과 일반구간을 분류하는 데 효과적인 평가지표 도출을 위해 정보획득량을 산출함으로써 정보획득량이 가장 높은 최적지표를 도출한다.
여기서, : 사전 엔트로피
: 사후 엔트로피
: 자식 노드
분석 결과
1. Real-world 데이터 활용한 주행행태 분석
상암 자율주행차 시범운행지구에서 주행하는 자율주행차의 주행모드별 교차로 영향권 및 비영향권의 기술통계량을 비교하였다. 첫째로, 교차로 영향권에서의 주행모드별 주행속도를 비교하였다. 교차로 영향권에서 AD mode의 평균 주행속도가 25.26, MD mode의 평균 주행속도가 27.57로 AD mode의 주행속도가 더 낮은 것으로 나타났다. AD mode 속도의 표준편차가 MD mode 속도의 표준편차에 비해 9.14% 작으며 AD mode의 최대 속도가 43로 MD mode보다 낮다. 이는 AD mode가 MD mode에 비해 보수적으로 주행하는 것으로 해석할 수 있다. 교차로 비영향권에서는 AD mode의 평균 주행속도가 30.14로 MD mode 속도보다 높은 반면 표준편차는 MD mode가 12.67로 더 크게 나타났다. AD mode는 교차로 비영향권에서 MD mode에 비해 높은 속도로 주행하다 교차로 영향권 진입 시 저속으로 주행하여 교차로 비영향권에서보다 교차로 영향권에서 보수적으로 주행한다는 점을 알 수 있다.
주행모드별 교차로 영향권의 가속도 기술통계량 결과, AD mode의 평균 가속도는 0.997이며 가속도 표준편차는 0.416로 도출되었다. 교차로 비영향권에서의 AD mode 평균 가속도는 0.873, 가속도 표준편차는 0.398로 나타났으며 교차로 영향권 및 비영향권에서 모두 AD mode의 평균 가속도가 MD mode의 평균 가속도보다 크며 표준편차는 작은 것으로 분석되었다. AD mode는 교차로 영향권 구분 없이 MD mode 보다 평균 가속도가 크게 나타나 급진적인 주행행태를 보인다.
주행모드별 교차로 영향권의 감속도 분석 결과, AD mode의 평균 감속도는 –0.673이며 감속도 표준편차는 0.393이다. 교차로 비영향권에서의 AD mode 평균 감속도는 –1.042, 감속도 표준편차는 0.484 이며 교차로 영향권에서 AD mode의 평균 감속도가 MD mode에 비해 작고 교차로 비영향권에서는 AD mode의 평균 감속도가 큰 것으로 분석되었다. 교차로 비영향권에서 AD mode는 교차로 진입 전 미리 감속을 시작하여 보수적으로 주행하는 것으로 해석할 수 있다. 교차로 영향권에서는 MD mode의 감속이 크게 발생하여 교차로 진입 직전 또는 교차로 면적 내에서 급감속을 수행하는 것을 의미한다.
전체 주행행태 분석 결과, 교차로 영향권에 관계없이 AD mode의 표준편차가 MD mode의 표준편차보다 작아 AD mode가 MD mode에 비해 안정적으로 주행하는 것을 의미한다. 또한 교차로 영향권의 속도 및 감속도는 평균과 표준편차 모두 AD mode의 값이 작아 안정적인 주행행태를 가지는 것으로 해석할 수 있다. Table 3에 주행행태 분석결과를 종합적으로 제시하였다.
Table 3.
Driving behavior analysis results





2. 주행행태 분석 결과 기반 VISSIM 파라미터 조정
주행행태 결과를 활용하여 조정한 VISSIM 파라미터는 3개의 distribution 파라미터이다. 먼저, desired speed distribution에는 교차로 영향권에 따라 주행모드별 속도분포를 적용하였다. 이 파라미터의 경우 교차로 영향권과 비영향권에 따라 속도 분포를 달리 적용하였으며, 차량의 거동 조정 시에는 교차로 영향권을 구분하지 않은 전체 속도 분포를 적용하였다. AD mode의 주행속도 범위가 MD mode에 비해 작으며 속도의 최댓값이 낮음을 알 수 있다. 두 번째로, 주행모드별 가속도의 분포를 desired acceleration functions에 적용하였다. 이 파라미터는 평균, 최대, 최소 가속도의 분포를 활용하여 차량 거동을 조정한다. AD mode의 최대 가속도가 MD mode보다 작아 그래프의 기울기가 완만하다. 마지막으로, 주행모드별 평균 감속도, 최대 및 최소 감속도를 활용하여 desired deceleration function을 조정하였다. AD mode는 MD mode에 비해 최대 감속도가 크며 급한 U형의 그래프가 나타났다. 파라미터의 default값은 단속류와 연속류, 교차로 영향권 등에 관계없이 설정된 값이며 도심부도로는 신호에 의한 정지 및 출발이 빈번하고 정지 시 큰 감속이 발생하여 default값과 다른 형태를 가진다. 본 연구에서는 단속류의 교차로 영향권과 비영향권을 구분하여 속도, 가속도, 감속도 주행패턴을 시뮬레이션에 적용하였으며 주행행태분석 결과로 조정한 distribution 파라미터는 Figure 3에 제시하였다.

3. 시뮬레이션 기반 주행안전성 최적지표 도출 결과
본 연구에서는 실제 자율주행차의 주행행태가 반영된 교통류 시뮬레이션 기반 주행안전성 평가지표를 산출하고 실도로 위험구간 식별에 가장 영향있는 평가지표를 선정하는 것을 목적으로 의사결정나무 분석을 수행하였다. 의사결정나무 분석에 앞서, 실제 위험구간의 도출을 위하여 Real-world 데이터를 활용하여 구간별 AEB 기반 ADRI 값을 산출하였다. Figure 4에 ADRI 기반 위험구간 예시를 제시하였다. 연속적으로 위험구간이 정의된 곳이 위험성이 높다고 판단하여 3구간 이상 연속적인 위험구간을 예시로 선정하였다. 예시로 선정한 3개의 구간은 자율주행차가 우회전을 수행하는 구간으로 나타났으며, 스쿨버스 또는 일반 승용차의 불법 주정차가 발생하는 구간으로 도출되었다.

본 연구에서 ADRI 기반 위험구간을 분류하는 시뮬레이션의 주행안전성 최적지표 도출을 목적으로 의사결정나무 모형을 적용하였다. 의사결정나무 모형 구축 시 출력변수로 Real-world 데이터를 활용하여 산출한 ADRI 기반의 위험구간과 일반구간으로 설정하였다. 총 186건의 데이터 중 training set과 test set의 비율을 7:3으로 설정하였으며 예측 성능을 향상시키기 위해 최적의 매개변수를 선정하였다(Hong and Jeon, 2023). 분석에 적용한 최적의 매개변수는 Table 4에 나타내었으며 노드분리는 엔트로피 지수(Entropy Index)를 이용하였다.
Table 4.
Parameter optimization results
의사결정나무를 구축한 결과, 분류정확도, 재현율, 정확도를 도출하였으며 분류정확도는 71%로 나타났다. 변수들의 상대적 중요도를 의미하는 정보획득량을 활용하여 위험구간을 분류하는 데 효과적인 평가지표를 도출하였다. 도출된 평가지표는 jerk_avg, acc_avg, jerk_sri, jerk_std로 총 4개의 평가지표이며 정보획득량은 0.42, 0.25, 0.15, 0.11 순서로 도출되었다. 평균 jerk는 정보의 불확실성인 엔트로피 지수가 가장 낮아 정보획득량이 가장 크게 도출됨으로써 입력변수 중 실제 위험구간 분류에 가장 효과적인 변수로 선정되었다. confusion matrix와 변수의 정보획득량은 Table 5에 제시하였다.
Table 5.
Confusion matrix and information gain
| Confusion matrix | Information gain | ||||
| - | Prediction | Recall |  | ||
| Normal (0) | Hazard (1) | ||||
| Actual | Normal (0) | 22 | 10 | 0.75 | |
| Hazard (1) | 6 | 18 | |||
| Precision | 0.64 | 0.71 | |||
의사결정나무 모형을 통하여 위험구간 분류에 가장 효과적인 평균 jerk 기반의 위험구간을 도출하였다. 평균 jerk 기반 위험구간은 5개의 등급(20% 기준)으로 구분하였으며, 주행안전성이 가장 취약한 등급의 구간은 회전을 수행하기 전 또는 회전 수행 직후의 구간으로 나타났다. 또한, 좌회전 차로 및 우회전 차로가 생성되거나 차로 수가 감소하는 등 차로 수가 변경되는 곳으로 도출됨에 따라 차로 변경으로 인한 jerk 값 변동이 주행안전성 취약 등급에 영향을 주었다고 해석할 수 있다. 평균 jerk 기반 위험구간을 구분하고 상위 3개의 위험구간을 Figure 5에 제시하였으며, 각 구간의 특성을 도출하였다. 평균 jerk가 가장 높은 147번 구간은 자전거 우선 도로이며, 제한속도가 30km/h인 이면도로와 접속하는 구간으로 나타났다. 또한, 비보호 좌회전차로가 생성되는 신호교차로이며 어린이 보호구역이 해제되는 구간이다. 두 번째로 위험구간인 134번 구간은 좌회전 전용차로가 생성되는 구간으로 잦은 차로변경이 발생하는 곳이다. 마지막으로 세 번째 위험구간인 132번 구간은 4개 차로에서 3개 차로로 차로 수가 감소하는 구간으로 4차로에서의 차로변경으로 인해 평균 jerk가 증가한 것으로 예상된다. 또한 도로기하구조와 평균 jerk 기반 위험구간의 관계를 Figure 6에 제시하였다. 도로기하구조는 좌회전, 우회전, 직진, 좌회전 전용차로 생성, 우회전 전용차로 생성, 차로수 감소, 신호교차로, 비신호교차로로 총 8개 기하구조에 대해 위험구간의 jerk를 비교하였다. 차로수 감소하는 경우 jerk의 평균이 0.415m/s2, 표준편차가 0.11m/s2로 가장 높아 주행하기에 위험한 기하구조이다. 두 번째로 위험한 기하구조는 좌회전 전용차로가 생성되는 구간으로, 평균이 0.408m/s2, 표준편차가 0.108m/s2로 도출되었다. 좌회전 또는 유턴을 수행하기 위해 차로변경 시 감속이 발생하여 주행안전성이 낮은 것으로 해석할 수 있다.


결론 및 향후 연구과제
자율주행차의 도입으로 혼재교통상황이 장기간 지속될 것으로 예상된다. 이에 따라 혼재교통상황의 안전성에 관련한 많은 연구가 진행되고 있으며, 연구에 활용되는 교통류 시뮬레이션에서 자율주행차의 현실적인 거동 구현과 실제 교통 환경을 잘 설명하는 평가지표 선정이 중요하다. 본 연구에서는 상암 자율주행 시범운행지구에서 운행 중인 자율주행차의 주행모드별 주행행태를 분석하였으며, 이를 활용하여 시뮬레이션 기반 최적의 주행 안전성 평가지표를 제시하였다. 우선, 교차로 영향권 및 비영향권에 따라 주행모드별 속도, 가속도 및 감속도 기반 주행행태 분석을 수행하였다. 교차로 영향권에 관계없이 MD mode의 속도, 가속도 및 감속도 표준편차가 AD mode보다 크게 나타나 AD mode일 때 보수적인 주행행태를 가지는 것으로 분석되었다. 또한, 주행행태 분석 결과를 시뮬레이션 내 자율주행차 거동 구현 시 활용하여 시뮬레이션을 수행하였다. 주행안전성을 평가하기 위하여 AVD를 활용하여 산출 가능한 10가지의 지표를 선정하였다. 선정한 평가지표는 의사결정나무를 기반으로 위험구간을 구분하기 위한 입력변수로 활용되었으며, 위험구간 식별에 효과적인 평가지표를 도출하였다. 식별에 효과적인 평가지표 중 상대적으로 변수 중요도가 높은 평가지표는 평균 jerk로 분석되었으며 평균 jerk 기반 상위 3개의 위험구간과 각 구간의 도로특성을 도출하였다. 따라서 본 연구에서 제시한 주행모드별 주행행태 분석은 자율주행차가 비자율주행차에 비해 보수적인 주행행태를 가진다는 기존 연구 결과를 입증할 수 있다. 또한 AVD를 활용하여 단속류의 시뮬레이션 파라미터를 조정하였다는 점에서 보다 현실과 유사한 교통환경을 구축하였으며, 본 연구에서 조정한 파라미터는 단속류 시뮬레이션 구축 시에 활용될 수 있다. 추가적으로 본 연구에서 제시한 최적지표는 향후 시뮬레이션 기반 주행안전성 분석 평가지표 선정 시 활용할 수 있을 것으로 기대된다.
본 연구를 발전시키기 위해서는 다음과 같은 추가적인 연구가 필요하다. 첫째, 자율주행차의 센서 데이터 및 추가적인 정보가 포함된 AVD 수집이 요구된다. 본 연구에서 활용한 AVD는 차간거리, 차두시간 등 상호작용 데이터와 steering과 같은 횡방향 데이터가 수집되지 않아 속도, 가속도, 감속도로 조정가능한 distribution 파라미터를 정산하여 자율주행차의 거동을 구현하였다. 향후 센서 기반으로 수집가능한 인접 차량 데이터 구득을 통해 보다 현실적인 자율주행차 거동구현이 가능할 것으로 기대된다. 둘째, 자율주행차 사고 이력 데이터를 활용하여 본 연구에서 도출한 최적지표와 사고발생구간에 대한 비교분석이 필요하다. 사고 이력데이터의 추가적인 수집을 통해 비교 분석을 수행하여 본 연구 결과의 신뢰도를 향상시킬 수 있다. 셋째, 최적지표 외 위험구간 분류에 영향을 미치는 다른 지표들을 함께 고려할 필요가 있다. 평가지표의 정보획득량에 따라 평가지표별 가중치를 적용하여 통합평가지표를 개발하고 통합평가지표 기반 위험구간을 도출할 수 있다. 마지막으로, 시뮬레이션 네트워크에서 도로 선형구조 외 요소의 구현이 요구된다. ADRI 기반 위험구간과 시뮬레이션 기반 위험구간은 상이한 결과를 도출함에 따라 버스정류장, 불법주정차 등 도로 선형 외 요소 구현을 고려할 필요가 있다.
