

서론
1. 연구 배경 및 목적
2. 연구 내용 및 방법
자동차 운행 제어 특성에 따른 연비 예측 모형 개발
1. 자료 수집 및 기술통계 분석
2. 모형 구축 및 해석
도로 환경 및 차량 특성에 따른 연비 예측 모형 개발
1. 자료 수집 및 기술통계 분석
2. 모형 구축 및 해석
결론 및 향후 연구과제
서론
1. 연구 배경 및 목적
기후변화 대응과 탄소중립 실현이 국제사회의 핵심 정책 과제로 부상함에 따라, 온실가스 배출 감축은 각국 에너지 및 수송 부문 전략에서 중요한 우선순위로 자리 잡고 있다. 이 중 도로 수송 부문은 전체 최종 에너지 소비와 온실가스 배출 비중이 높아(IEA, 2022), 에너지 효율 개선을 위한 기술적·정책적 접근이 집중되는 분야로 평가된다.
이와 관련하여 경제운전(Eco-driving)은 운전자 행태 또는 차량 제어 방식의 개선을 통해 추가적인 인프라 투자 없이도 연비 향상을 달성할 수 있는 비용 효율적인 수단으로 주목받아 왔다. 최근에는 자율주행 기술의 발전과 함께, 운전자의 주행 습관에 따른 연비 정보를 단순히 제공하는 기존 방식에서 나아가, 차량 시스템이 스스로 연비 최적화를 수행하는 자율주행 기반 경제운전 개념이 제안되고 있다. 이 개념은 차량의 실시간 가감속, 부하 상태, 주행 저항 등을 분석하여, 엔진 출력 및 제어 전략을 자동으로 조정함으로써 불필요한 연료 소모를 최소화하는 주행 방식으로 정의된다. 특히 자율주행 기술과의 결합 가능성이 제시되면서, 경제운전 전략은 인간 운전자의 한계를 보완하는 자동화 기반 제어 체계로 확장되고 있다(Li et al., 2024; Yang et al., 2023). 이에 따라 기계학습 기법을 활용한 연비 예측 모델(Pirayre et al., 2022; Oh et al., 2022; Cellina et al., 2023)과 자율주행 차량의 연료 효율적 주행 제어 전략(Hadjigeorgiou and Timotheou, 2025)이 활발히 제안되고 있다. 이처럼 자율주행 기반 경제운전은 기존의 교육·홍보 중심의 자발적 실천 방식이 갖는 한계를 기술적으로 보완하고, 연비 예측 및 제어의 정밀도를 향상시킬 수 있는 새로운 가능성을 제시한다.
그러나 자율주행 기반 경제운전 효과는 단순한 차량 제어 전략에 국한되지 않으며, 도로 기하구조, 교통 혼잡도, 교차로 간섭 등과 같은 외부 주행 환경 요인들과의 상호작용에 의해 결정적으로 영향을 받을 수 있다(He et al., 2022). 기존 연구들(Ericsson, 2001; Boriboonsomsin and Barth, 2009; Kabir et al., 2023)은 국외 도로교통 환경에서 외산 수동기어 차량을 대상으로 한 실험 연구들로, 국내 여건을 반영한 실증적 연구가 요구된다. 또한 연비에 영향을 미치는 요인을 분석함에 있어, 차량의 기계적 제어 요소나 신호 교차로, 경사도 등 개별적 요인에 초점을 맞추고 있으며, 도로교통의 외부 환경 요인에 대한 통제나 상호작용 분석이 부족하였다. 일부 연구는 설문조사를 활용해 연비 요인을 추정하는 방식에 의존하였으며, 이로 인해 운전자 응답의 주관성 및 실증적 한계가 존재한다. 아울러 정책적 차원에서도 경제운전 전략이 실제로 어느 정도의 연료절감 효과를 가지는지에 대한 정량적 평가 체계의 필요성도 제기되고 있다(Lee et al., 2018). 요약하면, 실제 주행 데이터를 기반으로 차종별로 경제운전의 연비 개선 효과를 정량적으로 비교하고, 차량 제어 특성, 도로환경, 운행 조건 간의 상호작용을 통합적으로 규명한 실증연구는 여전히 부족한 실정이다. 특히 자율주행 기반 경제운전은 운전자의 자발적 행태에 의존하지 않고, 시스템이 스스로 연비 최적화 제어를 수행한다는 점에서 기존 피드백 중심 방식과 차별성을 갖는다. 그러나 이러한 전략을 확인하기 위해서는 차종별 연비 민감도 및 도로환경 조건에 따른 최적 제어 조건을 실도로에서 정량적으로 분석하는 연구가 선행되어야 한다.
이러한 맥락에서 본 연구는 국내 도로교통 여건에서 실도로 주행 데이터를 바탕으로 다음 두 가지 측면에서 자율주행 기반 경제운전 전략의 설계 기반을 제시한 차별성이 있다. 첫째, 국내 주행환경에서의 차량 제어 특성이 연비에 미치는 영향을 정량적으로 분석하고, 차종별 연비 민감도의 차이를 규명함으로써 국내의 자율주행 제어에 필요한 기초적 근거자료를 제시한다. 둘째, 자율주행 기술의 우선 적용이 기대되는 버스 교통 분야를 대상으로, 국내의 다양한 운행 환경 요인을 고려한 연비 영향 요인을 분석하여 실제 환경에서 경제운전 효과의 차이를 실증적으로 도출한다.
이에 따라 본 연구는 자율주행 기반 경제운전 전략의 연비 개선 효과를 차종별·운행 조건별로 정량 분석하고, 이를 바탕으로 연비 예측모형과 운전 전략 설계 기준을 제시함으로써 기술적·정책적 측면에서 기여하는 것을 목적으로 한다. 기술적 측면에서는 차종별·운행 조건별 연비 예측모형을 구축하고, 연비 최적화를 위한 제어 전략 설계 기준을 도출한다. 정책적 측면에서는 기존의 홍보·교육 중심 경제운전 정책의 한계를 극복하고, 자율주행 기술을 활용한 경제운전 내재화 전략과 인프라 개선 방향을 제시하여 수송 부문 탄소중립 전략의 실행 가능성을 높인다. 결과적으로, 본 연구는 기술적·정책적 측면에서 자율주행 기반 경제운전의 현실적 도입 가능성과 확산 기반을 제시함으로써, 수송 부문 탄소중립 실현을 위한 실질적 근거를 제공하고자 한다.
2. 연구 내용 및 방법
본 연구는 자율주행 기반 경제운전 전략의 실증 기반을 분석하기 위하여, 연비에 영향을 미치는 요인을 차량 제어 행태와 도로교통 환경 요인으로 구분하여 분석하고, 이에 기반한 차종별 연비 예측모형을 구축하였다. 특히, 실도로 주행 환경에서 모든 요인을 동시에 수집·통제하기 어렵기 때문에, 분석 설계를 이원화하였다. 구체적으로는, 승용차 및 승합차 데이터는 위치정보 활용이 제한적이므로 제어 변수와 주행 행태 중심으로 분석하였고, 버스 데이터는 운행 권역 등 도로교통 환경 요인을 반영할 수 있도록 활용하였다.
첫 번째 데이터셋은 승용차 및 승합차를 대상으로 하며, 운전자의 실시간 제어 행태가 연비에 미치는 영향을 정량적으로 분석하기 위해 구축하였다. 총 980대 차량의 1초 단위 실도로 주행 데이터를 기반으로, 급가속·급감속 빈도, 퓨얼컷(Fuel-Cut) 발생 횟수 등 차량 제어 변수와 평균 주행속도, 연비 등의 성능 지표를 포함하고 있다. 통계분석은 단변량 상관분석 후, 변수 간의 비선형적 관계 및 조건부 구조 파악에 적합한 분류 및 회귀 트리(CART) 기법을 적용하였다. 이를 통해 제어 변수별 연비 민감도와 임계값을 도출하고, 자율주행 시스템 설계 시 활용 가능한 정량 기반의 운전 전략 규칙을 추정하였다.
두 번째 데이터셋은 대중교통 수단인 버스의 운행기록 데이터를 활용하여, 도로 환경 및 차량 제원이 연비에 미치는 구조적 영향을 분석하였다. 약 2개월간 수집된 총 176,833건의 운행기록에는 운행 권역, 차량 유형, 연식, 연료 종류, 경제운전지수 등이 포함되어 있으며, 분석에는 운행 권역–운행 건 단위의 계층 구조를 반영할 수 있는 혼합효과 모형(Mixed-Effects Model)을 적용하였다. 특히 경제운전의 효과가 도로 환경에 따라 달라질 수 있다는 가설을 검증하기 위해, 경제운전지수의 계수를 임의 기울기로 설정하였다.
자동차 운행 제어 특성에 따른 연비 예측 모형 개발
1. 자료 수집 및 기술통계 분석
운전자의 실시간 제어 행태가 연비에 미치는 영향을 파악하기 위해, 총 980대의 승용차 및 승합차를 대상으로 GPS 및 OBD 기반의 실운행 데이터를 수집·분석하였다. 주요 분석 변수는 급가속, 급감속, 급진로변경, 퓨얼컷 등 제어 행태 변수와 평균 주행속도 및 평균 연비 등의 성능 지표로 구성하였다. 이때, 해당 변수의 임계치는 Korea Transport Safety Authority(2017)의 경제운전지수 산정식을 바탕으로 국토교통부의 경제운전지수 및 환경부의 스마트운전지수에서 활용되고 있는 함수식에 따라, 급가속·급감속 등 임계치는 차속을 변수로 하는 5차 함수식으로 결정하였다. 초당 주행속도별로 해당 임계치를 초과하는 경우 그 횟수는 누적되며, 단위 주행거리 별로 임계치 누적 초과횟수에 따라 기준 경제운전지수에서 감해지는 구조이다. 반대로, 퓨얼컷이 유지되고 감점 요인이 없으면 지수가 증가한다. 특히, 일정 주행거리 기준으로 임계치 초과횟수를 일반화하기 때문에, 동일 조건의 주행거리 기준으로 연비를 상호 비교할 수 있는 특징이 있다. 이때, 최초 1분간 또는 차속 15km/h 이하에서의 급가감속은 이상치로 간주하며, 결측치는 제외하였다.
기술통계 분석 결과(Table 1)에 따르면, 승합차는 승용차에 비해 급감속(M=1.33 vs. 0.96), 급진로변경(M=5.15 vs. 3.59)의 발생 빈도가 상대적으로 높았다. 이는 차종에 따른 운행 특성과 제어 행태의 차이를 시사하며, 특히 승합차의 경우 감속 빈도가 높은 교통 환경 또는 승하차 반복 등의 운행 목적이 반영된 결과로 해석될 수 있다. 전반적으로 급가속 및 급감속 빈도는 낮은 수준으로 나타났으며, 이는 ‘안전속도 5030’ 정책, 어린이 보호구역 확대, ADAS(첨단운전자보조시스템) 도입 등 최근의 교통 안전정책과 운전자 보조 기술의 확산이 운전자 행태에 영향을 미친 결과로 추정된다.
Table 1.
Descriptive statistics of key variables by vehicle type
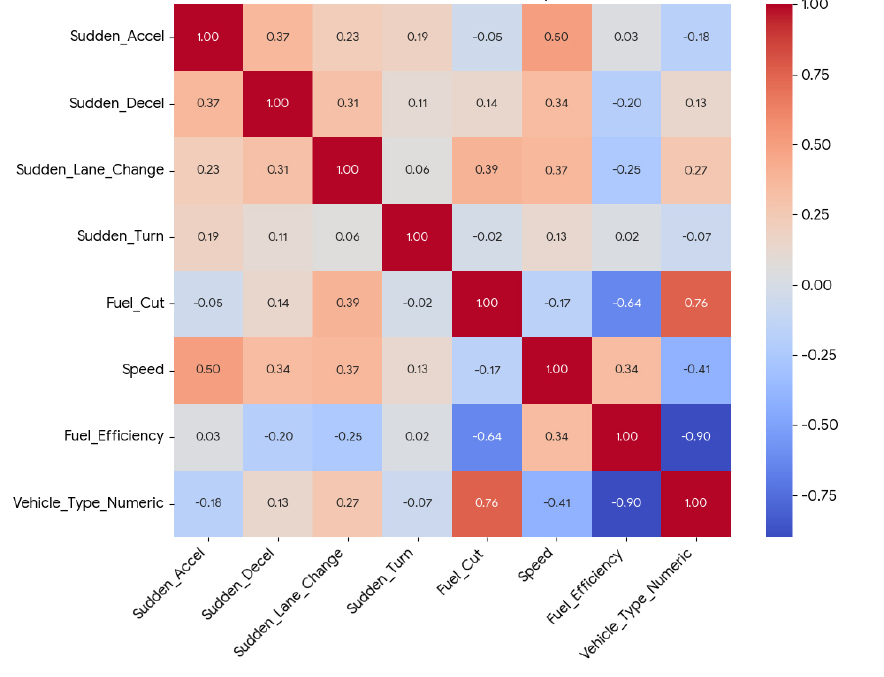
상관분석 결과(Figure 1), 평균 주행속도는 연비와 유의한 양의 상관관계(r=0.34)를 보였으며, 급진로변경(r=-0.25) 및 급감속(r=−0.20)은 연비와 음의 상관관계를 나타냈다. 이는 불필요한 감속이나 경로 변경이 빈번한 비효율적 운전 패턴이 연비 저하의 주요 요인임을 의미하며, 이는 Ericsson(2001), Alam and McNabola(2014) 등 선행연구의 결과와도 일치한다.
2. 모형 구축 및 해석
기초 분석에서 확인된 변수 간 상관관계를 바탕으로, 수요응답형 교통(DRT) 등 자율주행차량의 경제운전 알고리즘 설계에 활용 가능한 차종별 연비 예측 모형을 구축하고자 분류 및 회귀 트리(CART: Classification and Regression Tree)기반의 다변량 분석을 수행하였다. CART 기법은 변수 간 비선형적 상호작용, 임계값 기반의 조건부 규칙 도출, 모형 해석의 용이성 등의 장점으로 인해 교통공학 및 운전행태 연구 등에서 널리 활용되어 왔으며(Breiman et al., 1984), 본 연구에서도 자동차 운행 제어 특성과 연비 간의 구조적 관계를 규명하기 위해 활용하였다. 가령, CART 모형은 연비 예측에 있어 가장 영향력 있는 변수를 식별하고, 각 변수의 특정 임계값을 기준으로 데이터를 분기하는 과정을 반복하여 동일 그룹을 생성한다. 이때, 평균제곱오차(MSE)는 각 노드 내 예측치의 분산을 나타내는 지표로, 값이 낮을수록 해당 규칙(Rule)의 예측력이 높음을 의미한다. 본 분석에서는 승용차 및 승합차 실운행 데이터를 활용하였으며, 차종별 성능 제어의 주요 영향 변수와 조건별 예측 연비 값은 Table 2 및 Table 3과 같다.
Table 2.
Statistics of rule-based driving patterns for passenger cars
Table 3.
Statistics of rule-based driving patterns for vans
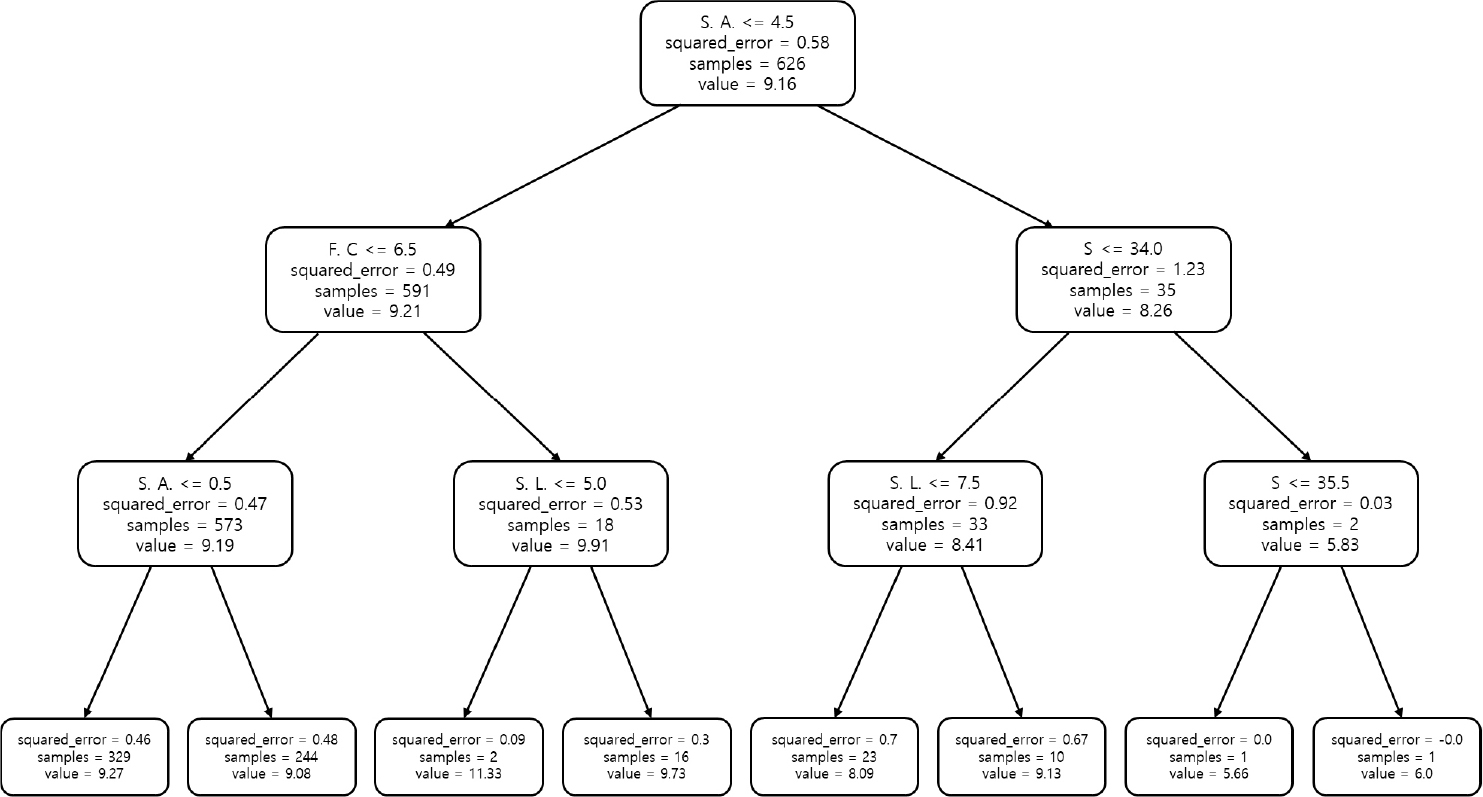
승용차의 경우 연비 예측 모형(Table 2)에서는 ‘급가속 빈도’가 연비를 결정하는 가장 중요한 요인으로 작용하였으며, 그 임계값은 4.5회로 나타났다. 최적 연비 조건 (Rule C-8)의 예측 연비(11.33km/L)는 급가속 빈도가 4.5회 이하로 제어되고, 동시에 퓨얼컷 발생 빈도가 6.5회를 초과하는 조건에서 나타났다. 이는 불필요한 가속을 최소화하고, 관성 주행을 적극적으로 활용하는 차량 제어 전략이 연비 향상에 결정적으로 기여함을 실증적으로 보여준다. 해당 규칙의 MSE 값은 0.05로 매우 낮아, 이 예측이 매우 신뢰성 있음을 확인하였다. 최악 연비 조건 (Rule C-2)의 예측 연비(5.66km/L)는 급가속 빈도가 4.5회를 초과하고, 차량 속도가 34~35.5km/h 이하의 특정 구간에 머무는 패턴에서 관측되었다. 이는 잦은 급가속과 더불어, 정체 구간에서의 '가다-서다' 행태나 저속 주행 중의 비효율적인 재가속이 연료 소모를 증가시키는 대표적인 행태임을 정량적으로 입증하는 결과이다. 또한 급가속 빈도가 낮더라도(4.5회 이하), 퓨얼컷 활용이 6.5회 이하로 저조할 경우에는 예측 연비가 9.08~9.27km/L 수준으로 나타났다(Rule C-4, C-6). 이는 급가속 억제와 관성 주행 활용이라는 두 가지 조건이 상호 보완적으로 작용할 때 연비 효율을 높일 수 있다는 점을 시사한다. 승용차 대상의 연비 예측 회귀 트리 구조는 Figure 2와 같다.
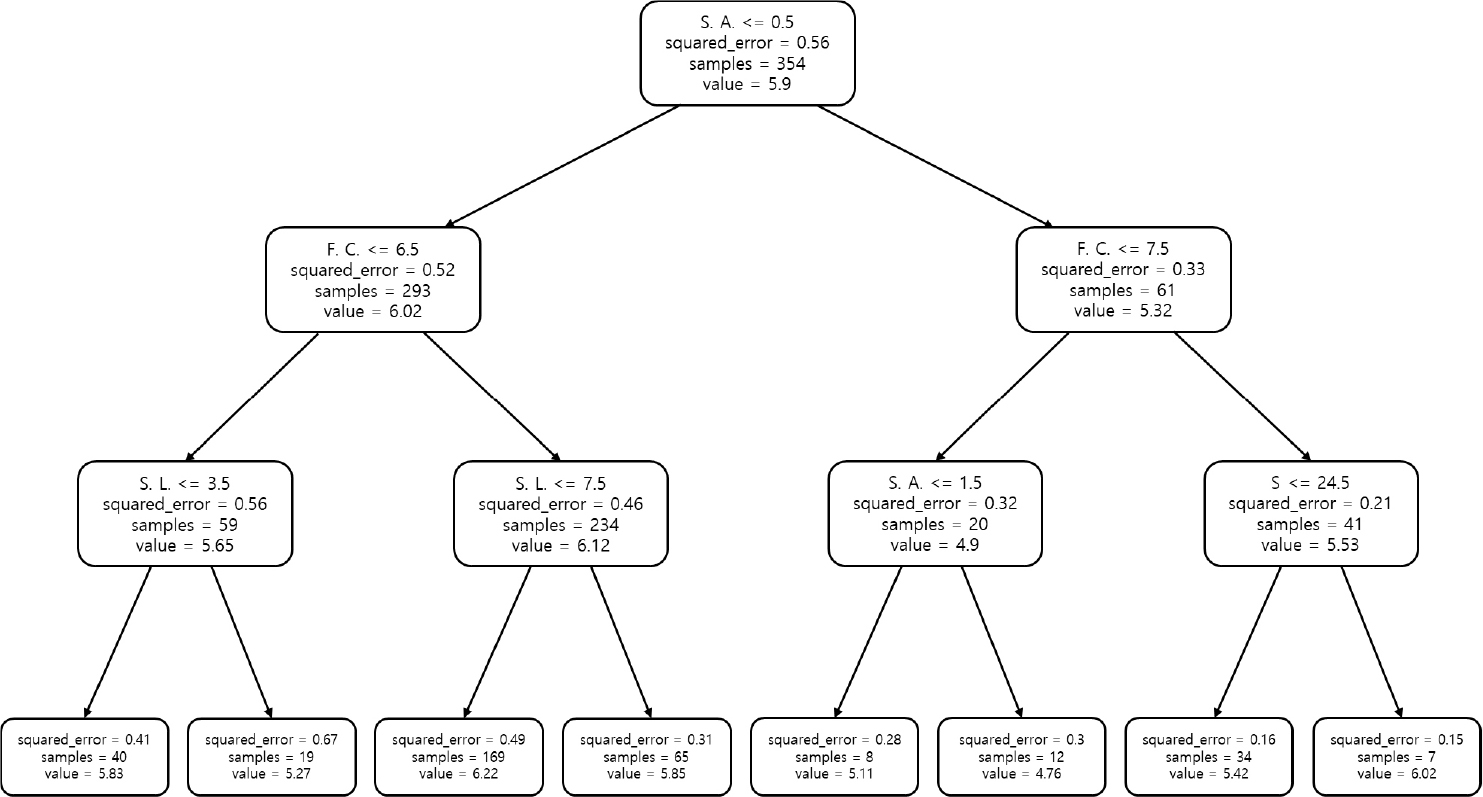
승합차 또한 급가속 빈도가 주요 변수로 도출되었으며, 그 임계값은 0.5회 이하로, 승용차보다 훨씬 민감한 반응을 보였다. 이는 차량 중량, 엔진 응답성, 운행 조건 등의 특성이 연비에 미치는 영향이 승용차 대비 더 크다는 것을 의미한다. 따라서, DRT 시스템 등에서 사용되는 승합차는 정차 및 재출발에 따른 연비 차이가 상대적으로 높기 때문에, 연비 최적화를 위한 급가속 억제와 퓨얼컷 활용을 높이기 위한 차량 제어가 필요하다. 가령, 승합차의 최고 예측 연비(6.22km/L)는 급가속이 0.5회 이하로 거의 발생하지 않고, 퓨얼컷 활용이 6.5회를 초과하는 조건(Rule V-8)에서 나타났다. 반대로, 최저 예측 연비(4.76km/L)는 급가속이 1.5회를 초과하고 퓨얼컷 활용이 7.5회 이하인 조건(Rule V-1)에서 도출되었다.
이러한 분석 결과는 차종별 연비 민감도가 구조적으로 달라, 경제운전 기반 자율주행 시스템에 단일 제어 로직을 적용하기 어렵다는 점을 보여준다. 특히, 급가속 억제와 퓨얼컷 활용이 동시에 충족될 때 연비 개선 효과가 극대화된다. 이는 향후 자율주행 차량이 도로 상황과 차량 제원에 맞춰 실시간 제어 전략을 조정하는 ‘상황인지형 운행 제어 알고리즘’으로 발전해야 함을 보여준다. 승합차 대상의 연비 예측 회귀 트리 구조는 Figure 3과 같다.
도로 환경 및 차량 특성에 따른 연비 예측 모형 개발
1. 자료 수집 및 기술통계 분석
운전자 제어 행태 외의 차량 특성 및 도로·운행 환경과 같은 구조적 요인이 연비에 미치는 영향을 분석하기 위해, 약 2개월간 버스 운수사로부터 수집된 총 176,833건의 운행기록 데이터를 활용하였다. 해당 데이터에는 운행 권역, 버스 유형, 원동기 형식, 연료 종류, 차량 연식 등의 차량·환경 변수뿐만 아니라, 가감속·급회전·과속 빈도 기반으로 산출된 ‘경제운전지수’도 포함되어 있다. 이때, 버스 유형 및 원동기 형식 등 각 변수 구분은 운수사업자의 내부 기준으로 설정되며, 운행 권역의 경우 가평권, 수원권, 광주권 등 25개 구분으로 100~16,797건의 자료로 구성된다(Table 4). 여기서, 해당 자료 각 1건은 하루 동안 버스 1대가 누적 주행한 자료이므로, 도로 환경 및 차량 특성은 충분히 일반화 가능하다고 판단하였다.
Table 4.
Sample size and mean fuel efficiency by region
| Gangnam | Gangwon | Goyang | … | Gwangju | Guri | Namyangju | Yongin | Chungcheong | Pangyo | |
| N | 459 | 439 | 929 | … | 14,234 | 10,702 | 13,873 | 16,797 | 100 | 13,306 |
| Ave | 3.53 | 3.60 | 3.13 | … | 3.00 | 2.87 | 2.77 | 2.91 | 3.53 | 2.97 |
버스 유형별 기술통계 분석 결과(Table 5), 장거리 및 급행 운행이 주를 이루는 우등고속버스의 평균 연비는 3.63km/L로 나타나, 도심 중심의 짧은 구간을 반복 운행하는 시내 저상버스(2.33km/L) 대비 유의하게 높은 수치를 보였다. 이는 도심 운행 중 반복적인 정지·출발과 교통 혼잡이 연비 저하의 주요 요인임을 보여준다. 또한, 운행 특성과 차량 구조적 제약이 경제운전 실천 가능성 및 연비 효율에 중대한 영향을 미친다는 점에서, Ericsson(2001), Kabir et al.(2023) 등이 제시한 도로 환경의 간섭 효과와도 일치한다.
Table 5.
Descriptive statistics by bus type
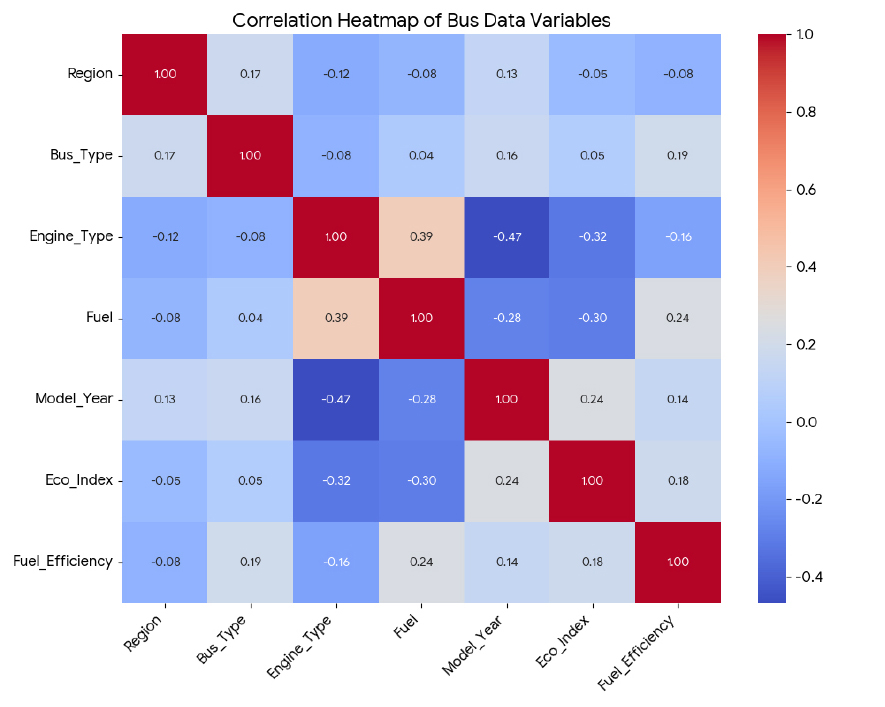
상관분석 결과(Figure 4), 경제운전지수는 연비와 유의한 정(+)의 상관관계를 나타내었으며, 차량 연식 또한 경제운전지수와 정의 관계를 보였다. 이는 상대적으로 신형 차량일수록 연비 개선 기술이 탑재되었거나, 정속 주행이 가능한 노선에 우선 투입되는 경향을 보임을 시사한다.
2. 모형 구축 및 해석
앞서 기술된 분석 설계에 따라, 연비에 영향을 미치는 구조적 요인들을 정량적으로 규명하기 위해 두 단계의 분석을 수행하였다. 먼저, 도로 환경과 차량 특성 요인이 연비에 미치는 영향을 계층적 구조를 고려해 분석하기 위해, 약 2개월간 수집된 176,833건의 버스 운행기록 데이터를 바탕으로 혼합효과 모형을 구축하였다(Table 6). 혼합효과 모형은 운행 권역 및 차량 유형과 같이 계층적 구조를 가진 데이터를 고려하여, 연비에 영향을 미치는 일반적인 경향(고정효과)과 권역별 차별화된 효과(임의효과)를 동시에 추정할 수 있다는 점에서 실제 운행 조건을 반영한 해석에 적합하다(Pinheiro and Bates, 2000). 이를 통해 경제운전지수, 차량 연식, 연료 유형의 영향을 검증하고, 권역별 도로·교통 환경이 연비에 미치는 구조적 차이를 규명하고자 하였다.
Table 6.
Mixed-effects model estimates for bus fuel efficiency
고정효과(Fixed Effects) 분석 결과, 경제운전지수와 차량 연식은 모두 연비에 통계적으로 유의한 정(+)의 영향을 미치는 것으로 나타났다(각각 β = 0.057, p < .001; β = 0.054, p < .001). 즉, 경제운전지수가 높을수록, 차량이 신형일수록 연비가 향상되는 경향을 보였다. 버스 유형별로는 시내 저상버스가 간선 급행버스에 비해 평균 0.867km/L 낮은 연비를 보였는데, 이는 정차 빈도, 교차로 밀집도, 평균 속도 등 도심 운행 특성에 기인한 결과로, Boriboonsomsin et al.(2010)가 제시한 도심 교통의 에너지 비효율성과 일치한다.
임의효과(Random Effects) 분석에서는 권역별 절편의 분산 추정치(0.015)가 통계적으로 유의하여, 연비가 권역별로 유의하게 차이가 있음을 확인하였다. 이는 모형에 포함되지 않은 고유한 도로·교통 환경 특성이 연비에 영향을 미침을 시사한다. 예컨대, 고속도로 통행이 많고, 혼잡이 적은 충북권, 호남권 등은 연비가 높은 반면, 수원권·성남권·하남권 등 도심지 권역은 혼잡으로 인해 연비가 낮았다. 또한 경제운전지수 효과의 기울기 분산(0.002) 역시 유의하여, 경제운전 효과가 권역별로 상이하게 나타남을 보여준다. 즉, 동일한 수준의 경제운전을 하더라도 정체와 신호 간섭이 많은 도심 권역에서는 효과가 제한적이며, 원활한 교통 흐림이 보장되는 권역에서는 효과가 크게 나타난다.
최종적으로 도출된 연비 예측식(Equation 1)의 각 계수는 다음과 같이 해석된다. 상수항(Intercept: 3.215)은 모든 독립변수가 평균일 때의 기준 연비를 의미한다. 경제운전지수 계수(Eco-Index_scaled: 0.057)는 지수가 1 표준편차 증가할 때 연비가 0.057km/L 향상됨을 의미하며, 차량 연식(Model_Year_scaled: 0.054) 역시 신형 차량일수록 연비 개선 효과를 보여준다. 연료(Fuel)는 CNG 대비 경유(Diesel)일 때 0.282km/L 높았으며, 버스 유형(Bus Type)은 시내대형에서 –0.659km/L의 보정값을 나타냈다. 임의효과 항 U0,Region은 권역별 기본 연비 보정값을, U1,Region은 권역별 경제운전지수 효과의 변화를 의미한다. 따라서, 본 모형은 연비가 단순히 개별 요인의 합이 아니라, 운행 권역이라는 맥락적 조건에 따라 달라지는 복합적 상호작용의 결과임을 보여준다.
본 연구의 혼합효과 모형 분석은 연비가 단순히 운전행태에 의해서만이 아니라, 운행 권역의 도로 구조와 같은 물리적 교통 환경에 의해 상호작용적으로 결정된다는 점을 실증하였다. 특히 경제운전 효과의 기울기 분산이 통계적으로 유의하다는 결과는 동일한 차량 제어 형태를 적용하더라도 교통 흐름, 신호 밀도 등 환경 요인에 따라 연비 향상 효과가 달라질 수 있음을 뚜렷하게 보여준다.
이러한 결과는 자율주행 기술의 실효성을 극대화하기 위해서는 차량 내 제어 알고리즘의 고도화와 더불어 교통 인프라의 구조적 개선이 병행되어야 함을 정책적으로 시사한다. 구체적으로는 V2I 연계 기반의 지능형 신호 운영, 버스전용차로의 확대, 정차 지점 간격 조정 등이 경제운전 기반 자율주행 시스템의 연비 개선 효과를 극대화할 수 있는 핵심적인 인프라적 기반이 될 수 있다.
결론 및 향후 연구과제
본 연구는 자율주행 기반 경제운전 로직 설계에 필요한 기초자료를 제공하기 위해, 자동차 연비에 영향을 미치는 운전자 제어 행태와 도로교통 환경 요인을 통합적으로 분석하고 차종별 연비 예측모형을 구축하였다. 이를 위해 승용차 및 승합차 980대의 실운행 데이터를 대상으로 CART 기법을 적용하여 차량 제어 요소의 연비 민감도를 정량화하였고, 약 17만 건의 버스 운행기록 데이터를 바탕으로 혼잡효과 모형을 구축하여 도로 환경 및 차량 특성이 연비에 미치는 구조적 영향을 분석하였다.
분석 결과, 승용차에서는 급가속 빈도 감소와 퓨얼컷 활용이 최적의 연비 조건으로 도출되어 관성 주행과 부하 최소화가 연료 효율의 핵심임을 확인하였다. 승합차의 경우 차량 중량 및 엔진 반응성 등 기계적 요인에 따라 연비 민감도가 더욱 크게 나타나 차종별 제어 전략의 차별화 필요성이 드러났다. 또한 버스 분석에서는 경제운전 점수와 차량 연식이 연비에 긍정적 영향을 미쳤으며, 시내 저상버스가 간선 급행버스보다 평균 0.867km/L 낮은 연비를 보였다. 특히 권역별·유형별 상호작용 효과가 유의하게 나타나, 동일한 경제운전 전략이라도 도로 및 교통 환경에 따라 연비 향상 효과가 달라질 수 있음을 실증하였다.
이러한 결과는 몇 가지 학문적 기여를 지닌다. 첫째, 다양한 차종의 고해상도 실운행 데이터를 활용하여 급가속, 퓨얼컷 등 핵심 제어 변수의 연비 민감도를 정량화하고, 상황인지형 제어 전략 설계에 활용 가능한 기준값을 도출하였다. 둘째, 기존 연구들이 개별 요인에 한정되었던 한계를 넘어, 본 연구는 실제 도로 인프라와 운행 특성을 혼합효과 모형으로 분석하여 지역 및 노선별 연비 차이를 규명하였다. 셋째, CART와 혼합효과 모형을 병행 적용함으로써 비선형성과 계층 구조를 동시에 반영하여 예측모형의 현실 적용 가능성과 일반화를 확보하였다.
정책적으로는, 경제운전은 단순한 자발적 캠페인 차원을 넘어 자율주행 시스템의 자동 제어 전략으로 내재화될 수 있으며, 실효성 극대화하기 위해서는 차량 내부 알고리즘 정교화와 함께 도로 인프라 개선이 병행되어야 한다. 특히 신호체계 최적화, 전용차로 운영, 교차로 구조 개선 등은 도로 인프라 차원의 지원은 기술적 제어 효과를 구조적으로 보완하는 수단이 될 수 있다. 경제운전 기반 자율주행 시스템의 연비 개선 효과를 구조적으로 보완할 수 있는 수단이 된다. 이러한 통합적 접근은 수송 부문에서의 에너지 효율 향상, 탄소배출 저감, 지속가능한 교통체계 구축에 기여할 수 있다.
향후 연구에서는 다음의 과제가 고려될 수 있다. 첫째, 본 연구는 차종별로 상이한 데이터셋을 활용하였으므로, 향후에는 동일 차량군을 대상으로 운전자 제어 행태와 도로 환경을 통합적으로 수집·분석할 수 있는 고해상도 운행 데이터셋 구축이 필요하다. 또한 본 연구에서 도출한 자율주행 기반 경제운전의 규칙을 기반으로 자율차량 내 알고리즘으로 변환하기 위한 기술적 연구도 필요하다. 둘째, CART 및 혼합효과 모형 외에도 기계학습 기반의 다양한 예측모형을 적용·비교함으로써 연비 예측의 정밀도와 일반화 가능성을 높일 필요가 있다. 셋째, 향후 연구는 연비 향상에만 국한하지 않고 온실가스 감축, 대기오염 저감 등 외부효과까지 고려한 평가체계를 설계하여 경제운전의 사회·환경적 기여도를 정량적으로 입증할 필요가 있다.
결론적으로, 본 연구는 자율주행 기반 경제운전 전략 설계와 교통 인프라 개선의 필요성을 실증적으로 제시함으로써, 수송 부문 탄소중립 실현을 위한 학술적 기반과 정책적 활용 가능성을 동시에 제공한다는 점에서 의의가 있다.
