

서론
문헌고찰
1. 국내외 엇갈림구간 지침간 비교를 통한 엇갈림구간 유형에 대한 고찰
2. 엇갈림구간의 교통분석 방법론에 대한 고찰
3. 본 연구의 차별성
엇갈림구간의 길이 설계기준 평가방법
1. 엇갈림구간의 차량주행행태 모델 구축
2. 엇갈림구간의 운영 및 안전 분석을 위한 VISSIM 시나리오 설정
실측자료 수집
엇갈림구간 운영 및 설계 기준 적합성 분석 결과
1. VISSIM Car-following and Lane-changing model의 입력변수 최적화 결과
2. 시나리오 분석결과: LOS별 교통량 수준 및 엇갈림구간 길이 분석 결과
3. 엇갈림구간 길이기준의 제시
도로주행 시뮬레이터를 활용한 엇갈림구간 길이기준의 적정성 검증
1. 도로주행 시뮬레이터 시나리오 설정
2. 도로주행 시뮬레이터 피실험자
3. Speed and Acceleration Profile 분석을 통한 엇갈림구간 길이기준의 적정성 검증
결론 및 제언
서론
고속도로의 엇갈림구간은 고속도로 합류구간과 분류구간이 연속되어 나타나는 구간으로, 합류, 분류, 엇갈림 교통류가 서로 상충하게 된다. 이에 엇갈림구간은 잦은 차로변경이 집중되어 통행속도가 급격하게 저하하여 교통혼잡이 발생하고 교통사고 발생가능성이 높다는 특징이 있다. 엇갈림구간의 교통운영과 안전을 확보하기 위해서는 엇갈림구간에서의 주행특성을 이해하고 도로설계단계에서부터 도로구조와 교통수요의 관계에 대해 면밀한 검토분석을 시행한 후 설계되어야 한다.
엇갈림구간의 도로구조 요소는 유형, 길이, 폭으로 구성되어있다. 특히 엇갈림구간의 길이는 구간 내 교통류에 영향을 끼치는 핵심적인 요소로, 적정길이는 엇갈림구간의 교통류를 안정하게 유지시키고 서비스수준(Level-of-Service, LOS)을 향상시킬 수 있다. 현재 국내 엇갈림구간 설계에는 일반적으로 한국도로용량편람(Korea Highway Capacity Manual, KHCM)의 엇갈림구간 운영평가방법을 활용하고 있다. KHCM에서는 구간길이, 총교통량, 엇갈림교통량비를 활용한 엇갈림구간의 LOS를 산정법을 제시하고 있다. 하지만 KHCM의 분석방법이 다양한 교통조건에서의 운영상태를 적절하게 추정하는지에 대해서는 아직 명확하게 제시된 바가 없다. 또한 KHCM에서는 단순히 길이만을 기준으로 엇갈림구간을 합류부 및 분류부와 구분하고 있으며, 엇갈림구간에서의 교통류 특성으로 인해 발생할 수 있는 교통문제를 완화시키는 적정 길이기준은 제시되어있지 않다는 한계가 존재한다.
엇갈림구간의 효율적 운영을 위한 적정길이를 제시하기 위해서는 전국 고속도로 엇갈림구간 유형별 주행특성을 우선적으로 분석해야 하며, 이를 토대로 한 체계적인 설계기준을 엇갈림유형별로 수립해야할 것이다. 본 연구는 현장관측자료에 기반하여 추정된 엇갈림유형별 주행행태를 바탕으로, 다양한 교통조건에 따른 엇갈림구간 설계기준의 적정성을 평가하는데 있다.
문헌고찰
1. 국내외 엇갈림구간 지침간 비교를 통한 엇갈림구간 유형에 대한 고찰
1) 국내지침의 엇갈림구간 유형구분 및 분석기준
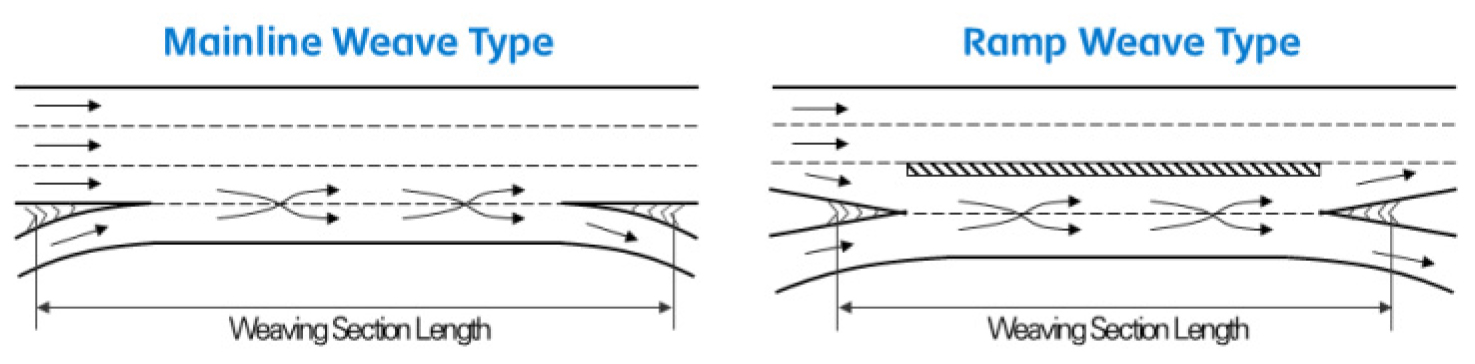
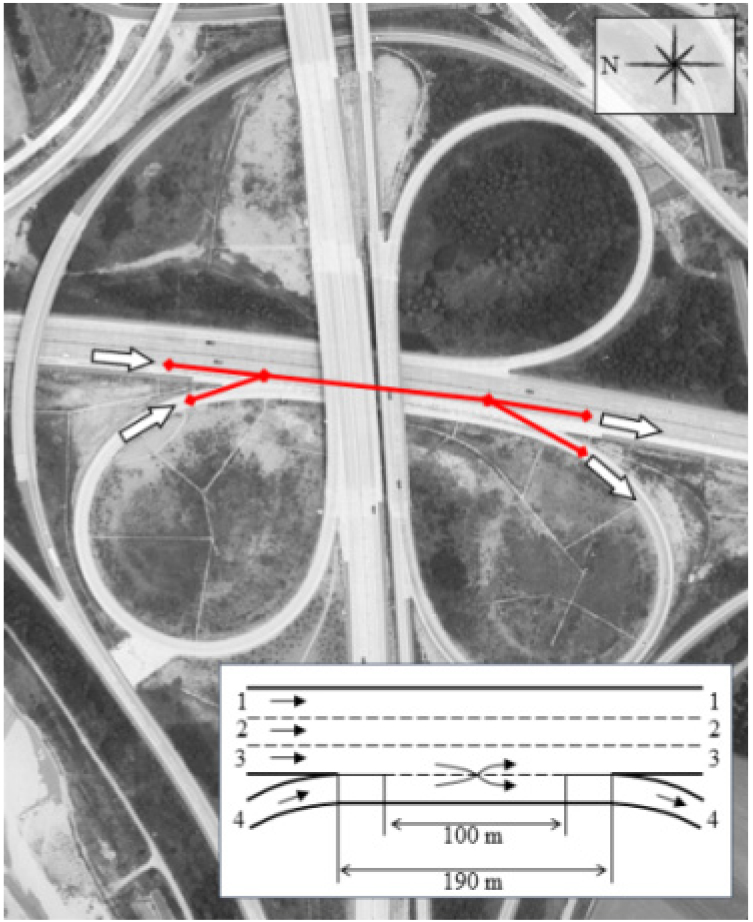
한국도로용량편람(Korea Highway Capacity Manual)(Ministry of Land, Infrastructure and Transport, 2013b)은 교통분야를 대표하는 지침으로 엇갈림구간을 운영평가관점에서 분석하고 있다. Figure 1은 KHCM에서 다루는 엇갈림구간의 대표적인 유형을 나타낸 것으로, 본선차로와 가감속차로의 이격여부에 따라 2가지로 분류하고 있다. 본선차로와 가감속차로가 이격되지 않은 본선-연결로 엇갈림유형(Mainline Weave Type)은 본선 직진교통류와 엇갈림교통류 간 영향이 존재한다. 반면, 본선차로와 가감속차로가 이격된 연결로-연결로 엇갈림유형(Ramp Weave Type)은 본선 직진교통류와 엇갈림교통류가 분리되어 서로 영향을 미치지 않는다. KHCM에서는 각 유형에 대해 간단한 운영평가방법과 길이설계기준을 제시하고 있다. 도로의 구조시설에 관한 규칙해설(Rules About the Road Structure & Facilities Standards)(Ministry of Land, Infrastructure and Transport, 2013a)은 엇갈림교통류가 최소한 시행해야하는 차로변경횟수를 기준으로 엇갈림구간의 유형을 크게 3가지, 세부적으로는 5가지로 분류하였다. 도로설계기준 및 도로공사표준시방서(Korea Construction Specifications and Design Standards)(Ministry of Land, Infrastructure and Transport, 2016)는 엇갈림구간의 길이에 대한 구체적인 설계 기준을 제시하지 않았다.
국내 지침 중 한국도로용량편람이 고속도로 엇갈림구간을 가장 자세하게 다루고 있으나, 엇갈림구간의 기본적인 대표유형만 다루고 있다. Table 1에서 확인할 수 있듯, 전국 56개 엇갈림구간 중 29개 구간은 KHCM이 제시한 유형에 속하지 않는 것으로 확인되었다. 엇갈림구간의 운영특성을 명확히 파악하기 위해서는 설계기준을 국내 엇갈림구간 운영현황에 맞도록 보완할 필요성이 있다.
Table 1.
Freeway weaving sections and KHCM applicability
2) 국외지침의 엇갈림구간 유형구분 및 분석기준
미국의 Highway Capacity Manual(USHCM)(Transportation Research Board, 2016)에서 제시하고 있는 엇갈림구간의 유형은 1개로 설정되어 미국의 엇갈림구간에는 모두 동일한 분석방법이 적용되고 있다. 엇갈림구간의 길이는 KHCM과 다르게 실제차량이 도로구간을 이용할 수 있도록 노면에 그려진 차선(혹은 갈매기표지) 사이의 구간으로 정의하였다. 엇갈림구간의 최대 길이는 주변 고속도로구조 및 교통상황을 고려한 수식으로 산정되며 일반적으로 2km 이내로 제한된다. 영국의 Design Manual for Roads and Bridges(DMRB)(Highways England, 2006)은 차로 수, 테이퍼 등의 도로기하구조에 따라 엇갈림구간의 유형을 5가지로 구분하고 있다. 엇갈림구간의 길이는 미국과 마찬가지로 갈매기표지 사이의 길이로 정의하였다. 엇갈림구간 최대 길이는 3km로 제한하고 있다. 독일의 German Highway Capacity Manual(HBS)(Lemke, 2016)은 엇갈림구간 유형을 1개로 설정하였고 모든 엇갈림구간에 대해 동일한 분석방법을 적용하고 있다. 엇갈림구간의 길이는 갈매기표지 사이의 구간길이로 정의하였다. 엇갈림구간의 최대길이는 제한하지 않고 있다. 일본의 Highway Capacity and Quality of Service(Japan Society of Traffic Engineers, 1987)은 엇갈림구간 유형을 크게 3가지, 세부적으로는 5가지로 분류하였다. 엇갈림구간의 길이는 타 국가와 마찬가지로 갈매기표지 사이의 구간으로 정의하였다. 엇갈림구간의 최대길이는 제한하고 있지 않다. 국외 엇갈림구간 분석지침은 각국의 상황에 맞게 기준이 제시되어 있음을 확인했다. 국가별 엇갈림구간의 기준은 Table 2에 제시되어있다.
Table 2.
Freeway weaving section definitions
3) 국내 엇갈림구간 운영현황에 따른 유형구분기준의 보완
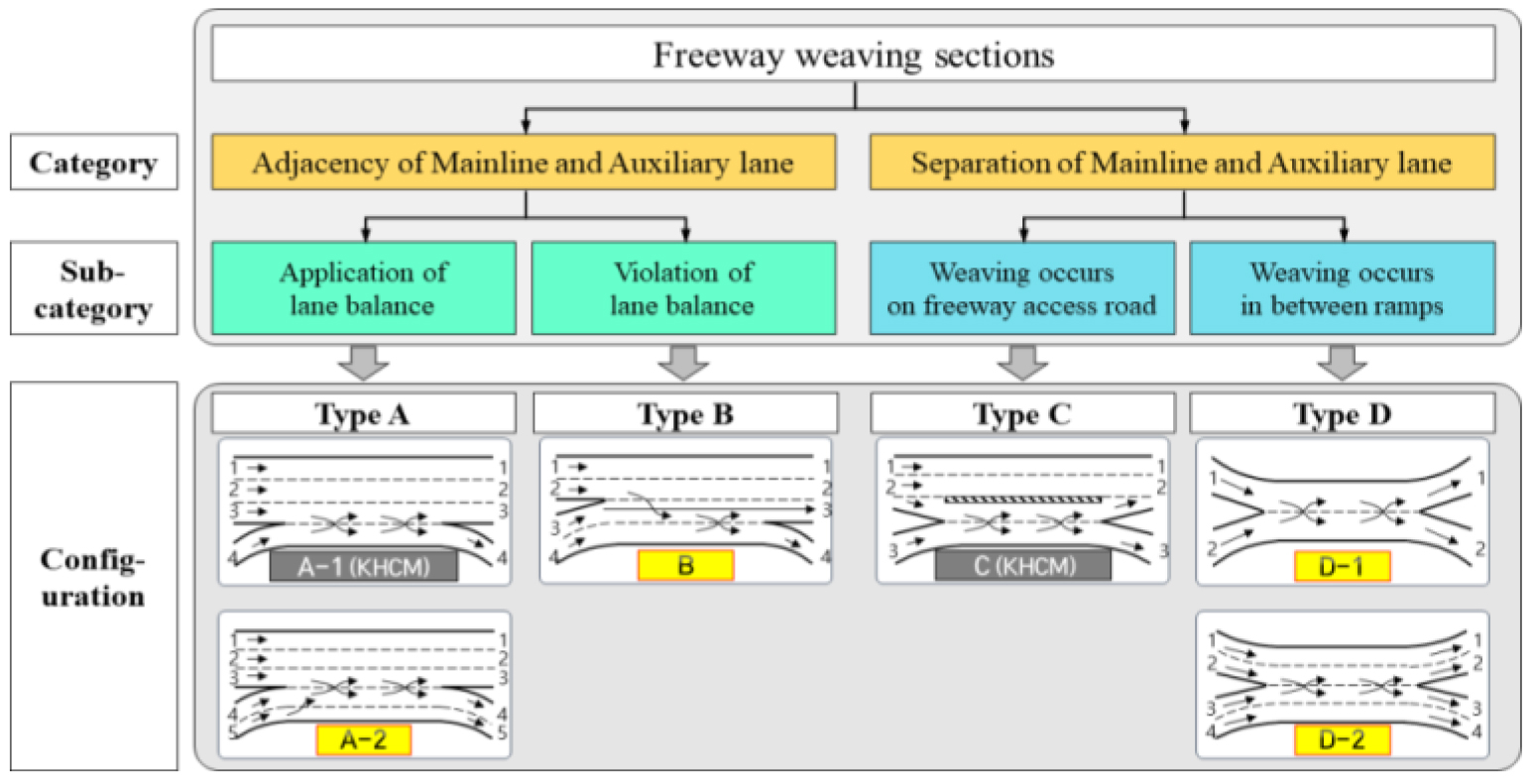
국외지침은 각국의 운영상황에 맞게 엇갈림구간의 유형을 다양하게 제시하고 있으나 국내지침은 이에 한계가 존재함을 확인하였다. 엇갈림구간은 기하구조적 형태에 따라 차량들의 통행행태가 달라지므로, 분석을 위해서는 국내의 엇갈림구간의 유형구분 기준을 보완할 필요성이 있다. Figure 2는 국내 엇갈림구간의 유형을 3가지 분류기준에 따라 구분한 결과를 제시하고 있다. 첫 번째 대분류 기준은 KHCM의 구분기준과 동일하게 본선차로와 가감속차로의 이격 여부로 선정하였다. 본선차로와 가감속차로가 이격되지 않은 “본선-연결로 유형”은 본선 직진교통류와 엇갈림교통류 간 영향이 존재한다. 반면, 본선차로와 가감속차로가 이격된 “연결로-연결로 유형”은 본선 직진교통류와 엇갈림교통류가 분리되어 서로 영향을 미치지 않는다. 1차적으로 분류된 각 엇갈림구간 유형에는 서로 다른 소분류 기준이 순차적으로 적용된다. 본선-연결로 유형에는 본선의 기본차로수 유지 여부에 따라 분류된다. 연결로-연결로 유형은 엇갈림 발생구간이 본선측도인지 혹은 연결로인지에 따라 분류된다. 즉, 엇갈림구간의 유형은 크게 4가지(A, B, C, D)로 분류되며, 진출입 연결로의 차로수에 따라 유형은 최종적으로 6가지(A-1, A-2, B, C, D-1, D-2)로 세분화된다. KHCM의 2가지 기본유형은 A-1과 C로 분류되었으며, 추가적으로 세분화된 유형을 통해 전국의 56개 고속도로 엇갈림구간을 분류하였다.
2. 엇갈림구간의 교통분석 방법론에 대한 고찰
1) 국내외 지침의 통계적 접근법을 활용한 엇갈림구간 분석
국내외 지침들은 주로 실용적 목적으로 엇갈림구간에 관한 관측자료를 바탕으로 방향별 교통량, 엇갈림구간의 길이 등의 독립변수로 속도를 추정한 뒤 이를 교통류 변수 간 관계식(밀도=교통류율/공간평균속도)에 대입하여 밀도를 계산하고 최종적으로 LOS를 도출하는 방식으로 엇갈림구간을 분석하고 있다. 이러한 지침들은 엇갈림구간의 기하구조형태에 의해 나타날 수 있는 차량들의 복잡한 통행행태에 대한 이해나 논리적인 설명이 없으며, 추정된 소수의 경험식을 바탕으로 통계적인 관점으로 현상을 분석하므로 엇갈림구간에서의 정밀한 교통분석이 어렵다.
Equation 1은 KHCM 분석방법에 제시되어 있는 교통류별 평균속도추정식을 나타낸 것이다. 추정식에는 상수 30을 더하고 있어 엇갈림교통류와 비엇갈림교통류 모두 최저속도가 30km/h 이상인 것으로 가정하고 있다. 하지만 실제로는 최저속도가 30km/h 이하인 경우가 빈번하게 발생한다. 또한 엇갈림교통류를 구성하는 진출교통류와 진입교통류의 평균속도가 서로 다른 경우가 존재하지만 Equation 1에서는 이를 다루고 있지 않다. 이에 더해, 엇갈림강도계수와 비엇갈림강도계수는 모두 통계적으로 구축된 수식이므로 각 변수의 관계와 그 의미를 이해하기 쉽지 않다. 관측을 통해 통계적으로 도출된 KHCM의 경험식은 일상에서 충분히 발생할 수 있는 다양한 교통상황을 반영하기 어려우며 가장 일반적인 상황만을 다룰 수 있다는 한계가 있다.
여기서, , 비엇갈림강도계수
, 엇갈림강도계수
: 비엇갈림교통류의 평균속도 추정치(km/h)
: 엇갈림교통류의 평균속도 추정치(km/h)
: 엇갈림구간의 설계속도(km/h)
: 총교통량에 대한 엇갈림교통량 비
: 총교통량(pcph)
: 엇갈림구간의 길이(m)
2) 해석적 접근법을 활용한 엇갈림구간 분석
엇갈림구간에 대해 해석적으로 접근한 연구는 크게 두 가지로 구분된다. 첫 번째는 엇갈림구간의 용량 또는 용량저하 현상에 관한 것이다(Cassidy and Bertini, 1999; Sarvi and Kuwahara, 2007; Chen and Ahn, 2018). 이들의 연구에 의하면 엇갈림구간의 용량 저하는 최대 교통유율의 10-30% 내외인 것으로 분석되었으며, 이는 엇갈림 교통류로 인해 공간이 발생하기 때문인 것으로 해석하였다. 두 번째는 차량의 통행행태에 관한 연구이다. 합류나 분류에 따른 차로변경의 위치에 관한 연구(Leclercq et al., 2016), 차로변경시행 전후로 운전자가 심리적으로 느끼는 anticipation과 relaxation에 대한 효과에 관한 연구(Schakel et al., 2012), 필수적 차로변경과 선택적 차로변경에 관한 연구(Kusuma et al., 2020) 등이 있다. 엇갈림구간의 길이와 관련한 연구로, Marczak et al.(2014)은 프랑스 고속도로 자료를 분석한 결과 차량은 엇갈림구간 중 60% 구간길이만을 실제 이용하며 나머지 40%는 이용하지 않는다고 제시하였다. Beinun et al.(2018)은 네덜란드의 합류부 3개구간, 분류부 3개구간, 8개 엇갈림구간에서의 차량궤적데이터를 바탕으로 Merging, Diverging, Pre-allocation, Cooperation, Anticipation, Relaxation, Keeping right 등 차로변경 관련 현상들이 발생하는 지점들을 조사하였다. 이를 바탕으로 차로변경 위치, 엇갈림구간 이용분포, cooperation 차량의 차두시간과 속도의 변화, 간격수락분포, 연결로 영향권 등에 대한 광범위한 통계분석결과를 제시하였다. 하지만 차량의 통행행태와의 연관성을 직접적으로 설명하지는 못하고 있다. 이와 같이 엇갈림구간에 대해 해석적 관점으로 접근한 연구들은 주로 차로변경 위치, 간격수락행태, 차량간의 상호작용 등 차로변경 시 발생하는 항목에 대한 단편적 현상을 통계적으로 분석하였으나 이러한 요소들이 복합적으로 작용하여 발생하는 엇갈림구간 내 속도 및 밀도 변화 등을 교통류 측면에서의 연구는 다루지 못하는 한계가 있다.
3) 미시시뮬레이션 프로그램을 활용한 엇갈림구간 분석
본 연구에서는 해석적 방법으로는 엇갈림구간의 길이에 따른 밀도값 또는 서비스수준을 산출하기가 어렵다는 점과, KHCM 밀도식의 적정성을 평가하기 위해서는 다양한 교통량 비율과 엇갈림구간 길이에 따른 분석이 필요한데 이러한 실측자료를 얻기 어렵다는 점을 감안하여 미시적 시뮬레이션 프로그램인 VISSIM을 활용할 계획인데 VISSIM을 활용한 교통분석 연구사례는 다음과 같다.
특정 도로구간에서의 차량의 통행행태는 실측 교통량 및 속도데이터를 기반으로 VISSIM의 통행행태 입력변수를 최적화하여 모사된다. 일부 연구에서는 최적화 기법으로 유전자 알고리즘(Genetic Algorithm)을 적용하여 교차로에서의 시뮬레이션 프로그램 VISSIM의 통행행태 변수별 값을 도출, 검증하여 혼합교통류에서의 차량유형별 통행행태를 비교하였다(Manjunatha et al., 2013; Dadashzadeh et al., 2019). Tettamanti et al.(2015)은 차량위치데이터를 기반으로 VISSIM 시뮬레이션의 교통수요를 유전알고리즘으로 최적화하는 모형을 구축하였다. Yang et al.(2016)은 VISSIM의 주요 입력변수를 선별하고 Orthogonal genetic algorithm을 적용하여 Ronghua 지역의 신호교차로에서의 통행행태를 모사하여 검증하였다. Durrani et al.(2016)은 미국 US-101 고속도로 엇갈림구간에서 VISSIM에 내재된 차량추종모형의 일부 입력변수를 최적화하고 차종별로 입력값에 차이가 존재함을 확인하였다. Lu et al.(2016)은 캐나다 Waterloo 지역의 교차로 녹화영상을 기반으로 VISSIM에 내재된 차량추종모형의 일부 입력변수를 최적화하여 실제 통행행태를 모사하여 검증하였다. Maheshwary et al.(2020)은 VISSIM의 차량추종모형 입력변수를 선별하고 차종별 입력값을 다중회귀분석모형으로 최적화하였다. Mahmood and Kianfar(2019)는 VISSIM의 입력변수 최적화를 위해 효과척도를 평균제곱근오차(Root Mean Square Error), 평균절대오차(Mean Absolute Error), GEH 통계로 적용하여 그 효과를 검증하였다. Kim et al.(2020)은 차량의 배출가스량을 추정하기 위해 다양한 효과척도를 적용하였고, 통행량과 관련된 효과척도가 신뢰성이 높은 것을 확인하였다.
3. 본 연구의 차별성
엇갈림구간 관련 연구는 대부분 해석적 접근법을 적용하여 시행되어 왔으며, 엇갈림구간 분석지침을 보완 및 개선하고 엇갈림구간 길이의 설계기준을 고찰하는 연구는 시작단계인 상태이다. 설계기준 관련 연구(Kim et al., 2021)를 발전시켜 설계기준에 대한 고찰을 체계화시켰다. 엇갈림구간의 효율적 운영을 위한 적정길이를 제시하기 위해서는 전국 고속도로 엇갈림구간 유형별 주행특성을 우선적으로 분석해야 하며, 이를 토대로 한 체계적인 설계기준을 엇갈림유형별로 수립해야할 것이다. 본 연구에서는 엇갈림유형별 주행특성을 구현하기 위하여 미시교통시뮬레이션 VISSIM의 차량추종모형(Car-following model)과 차로변경모형(Lane-changing model)을 적용하고 유전알고리즘 최적화기법을 활용하였다. 이후 다양한 교통조건별로 엇갈림구간 설계기준을 도출하고 그 적정성을 평가하였다.
엇갈림구간의 길이 설계기준 평가방법
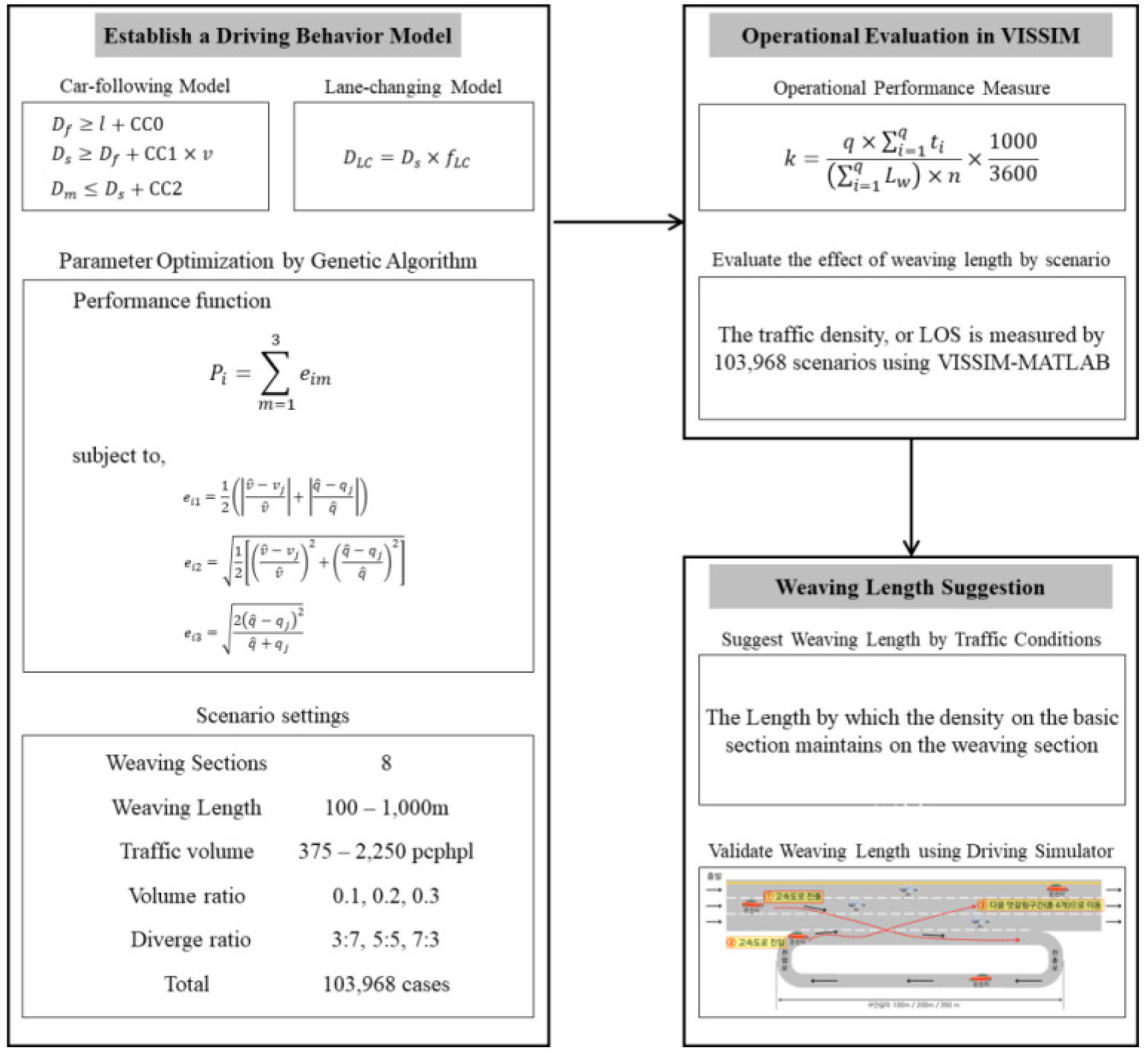
본 연구에서는 엇갈림유형별 주행행태모형을 구축하고 엇갈림구간을 효율적으로 운영할 수 있는 길이기준 산정 모형을 개발하였다. 개발모형에는 미시시뮬레이션 교통분석 프로그램 VISSIM을 도입하였다. 엇갈림유형별 주행특성은 VISSIM의 차량추종모형(Car-following model)과 차로변경모형(Lane-changing model)을 통해 구현되었다. 엇갈림유형별 차량주행모형은 통과교통량-평균통행속도-밀도 관측자료를 바탕으로 유전알고리즘(Genetic Algorithm, GA)을 적용하여 개발하였다. 엇갈림유형별 주행특성을 바탕으로 다양한 교통량조건과 구간길이조건에 따른 시나리오분석을 시행했다. 엇갈림구간의 적정길이는 고속도로 기본구간에서의 밀도-기반 서비스수준이 엇갈림구간에서 유지될 수 있는 기준을 통해 제시하였다. 이에 따라 현재 엇갈림구간의 길이결정에 활용되고 있는 설계기준의 개선방향을 제시하고자 한다. Figure 3은 본 연구의 흐름도를 나타내고 있다.
1. 엇갈림구간의 차량주행행태 모델 구축
엇갈림유형별 주행특성을 파악하기 위해 미시교통시뮬레이션 프로그램 VISSIM의 차량추종모형과 차로변경모형을 개발하였다. 엇갈림구간의 주행행태를 모사하려면 VISSIM의 차량추종모형과 차로변경모형에서 다루는 40개 이상의 실수단위 입력변수에 대한 조정이 필요한데, 모든 변수의 최적값을 추정하기 위한 탐색범위는 무한하여 시간적으로 거의 불가능하다. 본 연구에서는 고속도로 엇갈림구간 관련 VISSIM 선행연구 내용을 바탕으로 개별차량의 주행특성에 영향을 미치는 5개 입력변수를 차량추종행태과 차로변경행태 관점에서 선별하였다.
1) 차량추종모형(Car-following model)
차량추종모형은 차량의 종방향 이동행태를 나타내는 모형으로, 전방차량과의 거리, 상대속도, 상대가속도 등의 관계를 기반으로 차량의 가감속도 크기가 결정된다. VISSIM에 적용된 Wiedemann 99 모형은 운전자의 심리적인 요인을 다룬 차량추종모형로, 운전자는 상황별로 최적의 행동이 아닌 합리적인 행동을 이행한다고 가정한다. 모형에서는 운전환경 인지조건을 설정하고, 운전자는 인지상황에 따라 가감속크기로 반응하게 된다. 본 연구에서는 차량추종모형의 10가지 실수단위 입력변수 중 차량의 종방향 움직임에 영향을 미치는 3개 입력변수를 선별하였다; CC0(standstill distance), CC1(time gap), CC2(following variation). CC0은 정차 시 전방차량과의 최소유지거리를 의미한다. CC1은 정속주행 시 전방차량과의 선호차두시간를 의미한다. CC1의 값이 클수록 운전자는 방어적으로 주행하게 된다. CC2는 전방차량 추종거리범위를 나타낸다.
선별된 3개 입력변수를 바탕으로 차량추종행태는 3개의 수식으로 나타낼 수 있다. Equation 2는 정차 시 차두간격을 의미하며, 전방차량의 길이 과 CC0(standstill distance)의 합으로 나타내진다. 전방차량과의 차두간격이 이보다 가까워진다면 운전자는 감속하게 된다. Equation 3은 주행 중 선호안전거리를 의미하며, 정차 시 차두간격와 주행 중 선호차두간격의 합으로 나타낼 수 있다. 주행 중 선호차두간격은 CC1(time gap)과 통행속도𝜐의 곱으로 표현된다. 운전자는 전방차량과 선호차두간격을 유지하도록 주행한다. Equation 4는 최대추종거리를 의미하며, 주행 중 선호안전거리와 CC2(following variation)의 합으로 나타내진다. 전방차량과의 거리가 최대추종거리를 초과하게 되면 더 이상 전방차량을 추종하지 않고 임의적으로 통행하게 된다.
여기서, : 정차 시 차두간격(m)
: 주행 중 선호안전거리(m)
: 최대추종거리(m)
: 전방차량의 길이(m)
𝜐 : 전방차량의 주행속도를 초과하지 않는 본차량의 주행속도(m/s)
2) 차로변경모델(Lane-changing model)
차로변경모형은 차량의 횡방향 이동행태를 나타내는 모형이다. 차로변경은 차량의 이동경로에 따라 선택적 혹은 필수적으로 시행하는 유형으로 구분된다. 선택적 차로변경은 주로 고속도로 기본구간의 통과차량에 의해 시행된다. 해당 차량들은 통행속도를 향상시켜 더 나은 교통조건에서 주행할 수 있도록 차로를 변경한다. 필수적 차로변경은 이동경로 상 반드시 차로를 변경해야하는 상황에서 시행된다. 고속도로 진출 혹은 진입 시 차로를 변경해야하는 경우가 대표적인 예이다. 본 연구에서는 각 차로변경 유형에서 하나의 변수씩 선별하였다.
Equation 5는 선택적 차로변경에 관한 수식을 나타내고 있다. 안전거리계수는 차량추종모형의 주행 중 선호안전거리를 기반으로 한 차로변경 적극성을 나타낸다. 예를 들어, 계수 0.7은 목적차로에서 주행하는 전방차량과의 안전거리를 30% 감수하며 차로변경할 수 있음을 의미한다. 차로변경이 완료되면 선호안전거리는 기존의 로 설정된다. 필수적 차로변경에 대한 변수는 “운전자의 최대감속도”로 선정되었다.
여기서, : 차로변경 시 선호안전거리(m)
: 주행 중 선호안전거리(m)
: 안전거리계수
3) 유전알고리즘을 활용한 주행행태 입력변수 최적화
차량주행행태 모델에서 선별된 입력변수를 최적화하기 위해 유전알고리즘이 적용되었다. 유전알고리즘은 자연세계의 진화과정에 기초한 전역 최적화 기법으로, 일정 수의 표본들에 대해 성능함수(performance function)를 기준으로 우수한 표본 간 재생산 과정을 반복하며 최적의 표본을 탐색한다.
성능함수는 3개 오차항의 합으로 구성된다. 는 표본의 성능을 나타낸다. 표본의 첫 번째 오차항는 통행속도와 통과교통량의 평균절대비율오차(Mean Absolute Percentage Error, MAPE)를 의미한다. 두 번째 오차항는 통행속도와 통과교통량의 평균제곱근백분율오차(Mean Absolute Percentage Error, MAPE)를 의미한다. 세 번째 오차항은 미시시뮬레이션의 통과교통량 모사수준을 나타내는 GEH통계를 의미한다. 제시된 3개의 오차항이 각각 0.05, 0.05, 5.00 이하로 도출되면 모사수준이 합리적인 것으로 판단한다. 유전알고리즘은 일정 수 이상의 표본이 수용조건을 만족할 때까지 반복된다. Equation 6은 성능함수에 대한 수식을 나타낸 것이다.
여기서,
: 관측 평균통행속도(kph)
: 표본의 시뮬레이션에서 도출된 평균통행속도(kph)
: 관측 통행량(pcph)
: 표본의 시뮬레이션에서 도출된 통행량(pcph)
본 연구에서 적용한 유전알고리즘 최적화기법은 4단계의 수행과정으로 구성된다. 첫 번째, 표본에 대해 개별정보를 입력한다. 표본 수를 으로 설정하고 표본의 번째 입력변수()의 값이 하한값과 상한값을 고려하여 임의로 지정된다. 두 번째, 표본의 입력값이 모두 설정되면 각 표본에 대하여 VISSIM 분석을 수행한 뒤 성능함수(Equation 6)에 의해 성능이 우수한 표본 순으로 배열한다. 세 번째, 수렴조건을 검토하여 반복시행 여부를 판정한다. 우성기준에 부합하는 표본 수가 일정 수를 충족하지 않는다면, 열등한 표본을 제거하고 우수한 표본의 입력변수별 조합으로 제거된 수만큼 표본을 생성한다. 이후에 2단계로 돌아가 수렴조건을 만족할 때까지 반복시행한다. 수렴조건을 만족하면 다음 단계로 넘어간다. 네 번째, 입력변수의 값은 가장 우수한 표본의 입력변수 값으로 최적화된다. 유전알고리즘에 대한 전반적인 분석방법은 Table 3에 제시되어 있다. 본 연구에서는 공학용 소프트웨어 프로그램 MATLAB을 활용하여 미시교통시뮬레이션 프로그램 VISSIM에 유전알고리즘 최적화기법을 적용하였다.
Table 3.
Process of genetic algorithm
| Process of genetic algorithm |
|
Step 1. Initial settings ✔ : population, the number of candidates ✔: the parameter of th variable of th candidate, ✔: the lower-bound of th variable, ✔: the upper-bound of th variable, Step 2. Simulate VISSIM and measure performance ✔Set driving behavior parameters of , ✔Run VISSIM ✔Measure performance of th candidate using Equation 6 ✔Iterate Step 2 for all and sort candidates in the rank of performance Step 3. Convergence test ✔ ✔if, Convergence test passed else, Eliminate inferior candidates and regenerate to fill the number of the eliminated. Go to Step 2 end Step 4. Determine the optimized parameters of the best-performed candidate. |
2. 엇갈림구간의 운영 및 안전 분석을 위한 VISSIM 시나리오 설정
VISSIM 시뮬레이션 분석을 시행하기 위한 가정은 다음과 같다: (1)엇갈림구간의 상류부, 하류부, 진출입연결로 구간은 분석대상에서 제외한다; (2)차량은 노면에 표시된 차선을 가로질러 주행할 수 없다; (3)고속도로 본선과 연결로의 제한속도는 각각 100km/h와 40km/h이다; (4)차량은 승용차단위로 환산되어 시뮬레이션을 시행한다; (5)시뮬레이션은 60분간 진행되며 사전에 15분의 warm-up이 적용된다.
다양한 교통상황에 따른 엇갈림구간 길이의 영향을 분석하기 위해, 시나리오의 변수는 4가지로 설정하였다. 엇갈림구간 길이의 범위는 100-1,000m이며 50m 단위로 증가하도록 설정하여 19가지 상황으로 구성하였다. 교통량수준은 375-2,250pcphpl이며 25pcphpl 단위로 증가하도록 설정하여 76가지 상황으로 구성하였다. 엇갈림교통량비(volume ratio)는 총교통량에 대한 엇갈림교통량의 비를 의미하며, 일반적인 교통상황을 고려하여 0.1, 0.2, 0.3으로 구성하였다. 진출진입비(diverge ratio)는 엇갈림교통량에 대한 진출교통량과 진입교통량의 비를 의미하며, 3:7, 5:5, 7:3으로 구성하였다. 엇갈림구간 6개 유형 8개 지점별로 위 4가지 변수의 조합을 적용하였으며 총 103,968개의 시나리오가 구축되었다. MATLAB의 COM 인터페이스를 적용하여 VISSIM과 연동 후 분석을 수행하였다. Table 4와 Figure 4는 각각 시나리오 변수와 엇갈림구간 교통류 도식에 대한 설명을 보여주고 있다.
Table 4.
VISSIM scenario settings
실측자료 수집
본 연구에서는 전국의 56개 엇갈림구간 중 엇갈림유형별 대표지점을 총 8개 지점으로 선정하였다. 엇갈림구간에서의 교통특성을 분석하기 위한 현장조사 지점 선정조건은 (1)하류부 교통상황으로부터의 영향을 적게 받으며, (2)현장조사를 위한 카메라 설치위치가 적합하고, (3)현장조사 시 추락사고위험이 없으며, (4)지리적 접근성이 용이한 지점으로 설정하였다. 현장조사는 2020년 9월과 10월에 진행되었다. 엇갈림구간에서의 통과교통량, 진입교통량, 진출교통량을 구득하기 위해 현장방문-카메라설치–영상녹화(6시간)를 수행하였다. 현장조사는 녹화시간대는 첨두시간을 포함하였으며, 구득영상 중 본선하류부 정체의 영향이 전파되어 엇갈림구간만의 특성을 분석하기 어려운 시간대와 시인성이 떨어져 차량추적이 어려운 저녁 시간대는 제외되었다. 차종은 승용차, 트럭, 버스 3종으로 구분하였으며 1분단위로 이동방향별 교통량을 관측하였다. Table 5는 실측자료 수집내용을 나타낸 것이다.
Table 5.
Data description
엇갈림구간 운영 및 설계 기준 적합성 분석 결과
1. VISSIM Car-following and Lane-changing model의 입력변수 최적화 결과
Table 6은 엇갈림유형별 주행특성을 의미하는 Driving Behavior Parameters 최적화 결과를 나타낸 것이다. 최적화값을 바탕으로 차두간격, 선호차두시간, 선호차두간격을 환산한 결과를 통해 주행행태 수치는 합리적으로 추정된 것을 확인하였다. Table 7은 엇갈림유형별 주행특성에 따른 성능평가결과를 제시한 것이다. Training은 교통량이 가장 많이 관측된 1시간 데이터를 활용하였으며, Validation은 그 다음으로 교통량이 많이 관측된 1시간 데이터를 활용하였다. Validation 분석결과는 Training 분석결과와 유사한 수준으로 측정되었으므로, 차량주행행태모형이 적절하게 구축되었음을 알 수 있다.
Table 6.
Result of optimized driving behavior parameters for VISSIM
Table 7.
Results of training and validation using optimized parameters in VISSIM
2. 시나리오 분석결과: LOS별 교통량 수준 및 엇갈림구간 길이 분석 결과
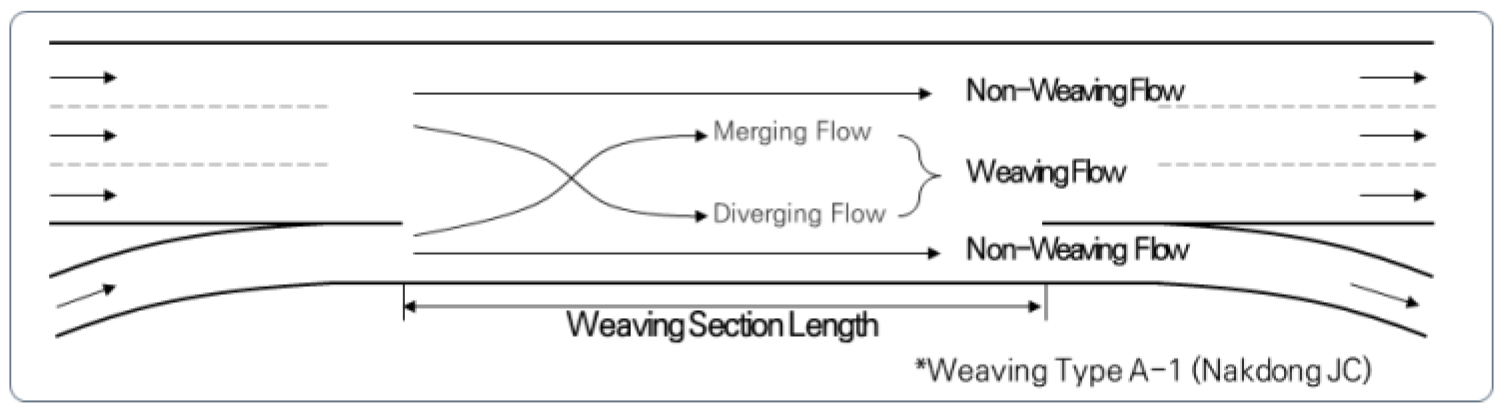
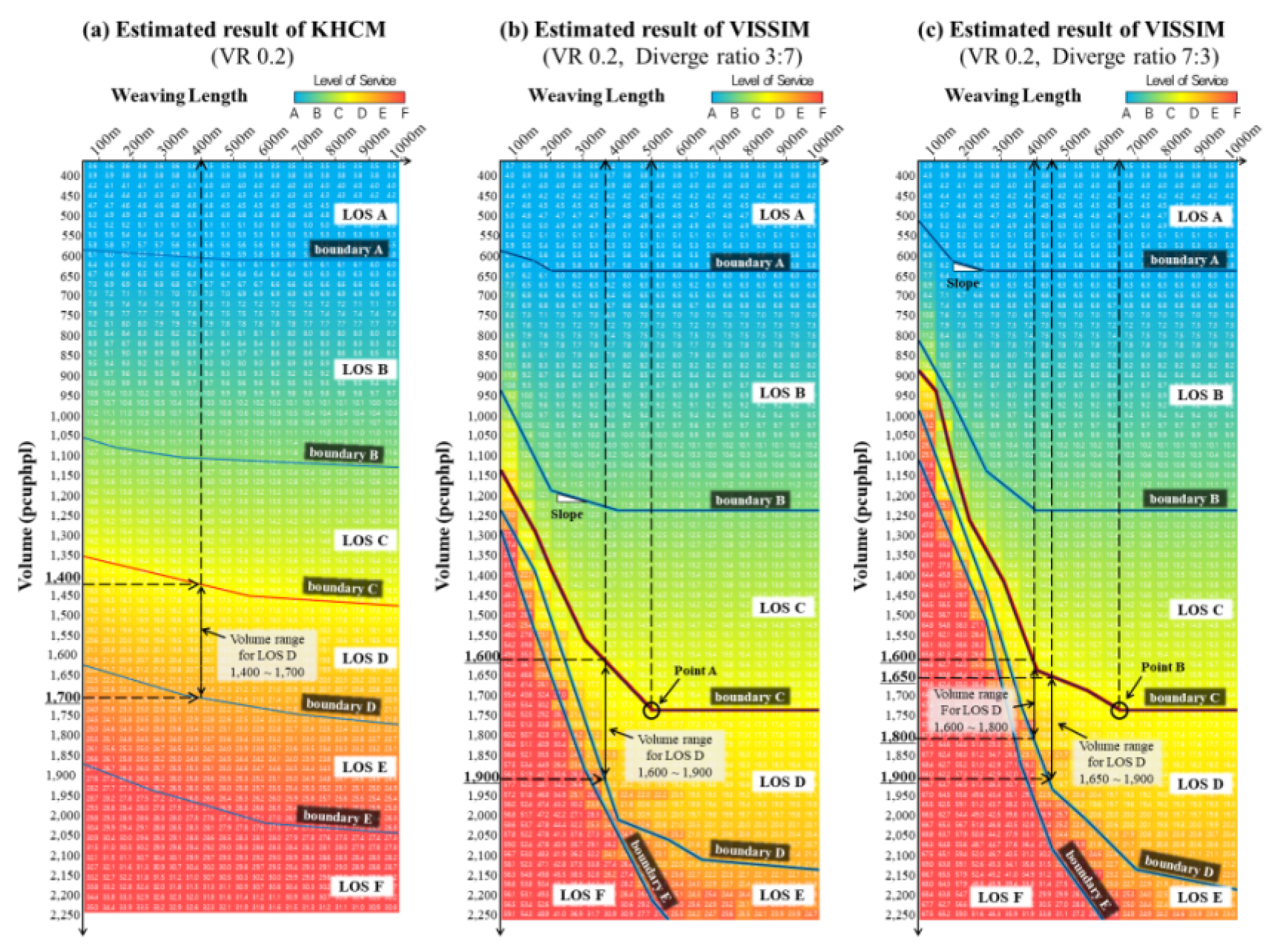
Figure 5는 KHCM과 VISSIM을 활용한 엇갈림유형A-1(낙동JC)의 시나리오 분석결과를 나타낸 것이다. KHCM 분석과정에서는 진출진입비를 다루지 않기 때문에 엇갈림교통량비 0.2만을 적용하였다. VISSIM 분석과정에는 엇갈림교통량비 0.2, 진출진입비 3:7 혹은 7:3을 적용하였다. x축과 y축은 각각 엇갈림구간의 길이와 교통량을 나타낸다. 그래프의 칸에는 해당 시나리오에서 측정된 밀도가 제시되어있다. 칸의 색상은 밀도가 증가함에 따라 파랑에서 빨강으로 변화하는 그라디언트 색상을 적용하였다. 시나리오별 엇갈림구간의 서비스수준(Level-of-Service, LOS)은 KHCM의 밀도기반 운영평가 기준을 바탕으로 제시하였다. 그래프에는 경계선을 그려 LOS를 구분했다.
1) KHCM 및 VISSIM의 시나리오 분석결과 비교
KHCM은 통계적 접근법으로 엇갈림구간의 운영상태를 평가하므로, 추정밀도는 교통량 및 구간길이와 거의 선형비례관계를 나타내고 있는 것을 Figure 5(a)에서 확인하였다. 이는 LOS 경계선의 간격이 비슷하며, 각 경계선의 기울기도 시나리오 변수와 무관하게 균등하게 유지되는 것을 통해 확인할 수 있다. 이는 KHCM이 엇갈림구간 내 교통류 간 상충으로 인해 발생하는 급가감속 등의 다양한 통행행태를 충분히 반영하지 못한 것으로 해석된다. 반면, Figure 5(b-c)에 제시된 VISSIM의 분석결과는 교통량과 구간길이에 따라 LOS 경계선이 불규칙적인 비선형성을 나타내고 있다. LOS 수준에 따라 교통량의 범위는 상이하게 나타나며, 특히 LOS E는 경계선의 폭이 좁고 기울기가 가파른 것으로 분석되었다. LOS E 수준의 교통상황은 용량상태의 불안정 교통류이며 작은 혼란이 발생하여도 쉽게 와해상태가 발생하는 민감한 교통류 상태이다. 따라서 VISSIM의 분석결과는 차량의 임의적 통행행태를 반영한 합리적인 결과를 추정한다고 판단된다.
KHCM과 VISSIM이 제시하는 서로 다른 분석결과는 엇갈림구간 길이 설계기준에 대해 다르게 해석될 수 있다. 구간길이가 400m인 경우, LOS D가 유지되는 교통량 범위는 KHCM과 VISSIM에서 각각 1,400-1,700pcphpl, 1,600-1,900pcphpl로 분석되었다. 동일한 시나리오에서 다른 결과가 나오는 것으로 어느 것이 더 타당하다고 단언할 수는 없으나, 이는 국내 엇갈림구간 길이 설계기준을 상세히 다루는 KHCM 분석지침이 보완될 필요성을 시사하고 있다.
2) 진출차량과 진입차량이 엇갈림구간 운영상태에 미치는 영향에 대한 해석
Figure 5(b)는 엇갈림교통량비 0.2, 진출진입비 3:7인 경우의 시나리오 분석결과를 나타낸 것이다. 구간길이가 일정 수준을 넘어서면 밀도는 거의 변하지 않는 것으로 분석되었다. 경계선 C의 기울기는 구간길이가 100m부터 증가함에 따라 점진적으로 완만해지며, 구간길이가 500m(Point A)를 넘어서게 되면 기울기가 사라지는 것을 확인할 수 있다. 이는 구간길이가 길수록 길이연장에 의한 LOS 향상효과가 점차 감소한다는 것을 의미한다. 따라서 해당 교통조건에서 LOS C를 유지할 수 있는 최대 구간길이는 500m라고 제시할 수 있다. 반면, 구간길이가 짧은 경우에는 LOS가 악화됨에 따라 경계선의 기울기는 급격하게 증가하는 것으로 분석되었다. 이는 교통량 증가에 따라 엇갈림구간의 수용능력이 불안정해지고 정체가 더 쉽게 발생하게 됨을 의미한다. 이는 길이가 짧은 구간에서 빈번한 차로변경이 집중되기 때문인 것으로 판단된다. 급격한 차로변경은 차량의 통과차량의 급가감속 행태를 유발하여 엇갈림구간의 정체를 심화시키게 된다.
이러한 분석결과를 바탕으로, 특정 교통조건에 대한 LOS별 적정구간길이를 제시할 수 있다. 예를 들어, 어떤 엇갈림구간이 유형 A-1, 엇갈림교통량비 0.2, 진출진입비 3:7이며 첨두시간 교통량이 1,600-1,900pcphpl인 것으로 분석되었을 때, LOS D를 유지하기 위해서는 구간길이가 350m이 적절한 것으로 분석된다.
Figure 5(c)는 엇갈림교통량비 0.2, 진출진입비 7:3인 경우의 시나리오 분석결과를 나타낸 것이다. Figure 5(b)와는 달리 진출교통량이 증가함에 따라 경계선의 절편과 기울기가 증가한 것으로 분석되었다. 예를 들어, 경계선 C의 기울기가 사라지는 구간길이는 650m(Point B)로 연장되었다. 이는 진출차량이 구간밀도를 증가시켰으며 밀도를 낮추기 위해서는 추가적인 구간길이가 필요하기 때문인 것으로 분석된다. 진출차량은 고속도로 본선에서 진출연결로로 주행함에 따라 통행속도를 100km/h에서 40km/h로 감속하게 된다. 이러한 감속행태가 고속도로 본선 통과차량의 주행을 방해하므로, 진출차량이 많을수록 교통운영상태가 더 빠르게 악화된다고 해석할 수 있다. 반면, 진입차량은 가속주행행태를 나타내므로 교통운영에 미치는 영향이 진출차량에 비해 상대적으로 적다.
Figure 5(b)와 (c)를 종합하여 분석하였을 때, 진출차량의 비율이 증가함에 따라 특정 LOS에 해당되는 교통량의 범위는 감소하게 된다. 예를 들어, 구간길이가 400m일 때 LOS D를 유지할 수 있는 교통량의 범위는 진출진입비가 3:7인 경우 1,600-1,900pcphpl인 반면, 진출진입비가 7:3인 경우 1,600-1,800pcphpl로 감소한다. 이는 엇갈림구간의 운영평가에 진출진입비가 유의한 영향을 미친다는 것을 의미한다. VISSIM을 활용한 엇갈림구간의 밀도-기반 LOS 분석결과는 차량의 미시적 통행행태를 집계하여 거시적인 결과물을 도출할 수 있는 가능성을 시사하고 있다.
3. 엇갈림구간 길이기준의 제시
본 연구진은 고속도로 기본구간의 교통소통수준 및 교통류가 엇갈림구간에 진입하였을 때에도 안정적으로 지속된다면 교통운영과 안전을 증진시킬 수 있을 것으로 판단하였다. 현재 KHCM에 제시된 지방부와 도시부의 고속도로 설계기준은 각각 LOS C와 D 수준을 유지할 수 있는 도로로 설계하도록 되어있다. 따라서 본 연구에서는 시나리오 분석결과를 활용하여 목표LOS를 유지할 수 있는 구간길이의 범위를 선정하고 최소길이와 권장길이(최대길이)를 제시하였다. KHCM에서 제시하는 기본구간에서의 LOS 판정기준이 엇갈림구간에서의 판정기준과 다르므로, 엇갈림구간의 LOS기준에 맞도록 같이 기본구간의 교통량범위를 보간하였다. 이에 엇갈림구간 길이기준은 지방부의 경우 교통량 1,200pcphpl에 대해 LOS C를 유지할 수 있는 구간길이의 범위이며, 도시부는 교통량 1,800pcphpl에 대해 LOS D를 유지할 수 있는 구간길이의 범위로 Table 8과 같이 제시하였다. 연결로-연결로 엇갈림유형 C, D-1, D-2는 조건을 항상 만족하는 것으로 분석되어 표기하지 않았다.
엇갈림유형별 길이기준은 동일한 교통조건에 대해 상반된 결과를 제시하는 것으로 분석되었다. 예를 들어, 엇갈림유형 A-1은 지역이 도시부에 가깝고, 엇갈림교통량비(VR)가 크고, 진출진입비가 클수록 적정길이기준이 증가하는 것으로 분석되었다. 반면, 엇갈림유형 B의 대동JC는 오히려 진출진입비가 작을수록 길이기준이 증가하는 것으로 분석되는데, 이는 해당 엇갈림구간의 도로구조상 진출교통류보다 진입교통류가 엇갈림구간의 운영에 더 큰 영향을 끼치기 때문인 것으로 해석된다.
Table 8.
Design standard for freeway weaving section length
도로주행 시뮬레이터를 활용한 엇갈림구간 길이기준의 적정성 검증
미시시뮬레이션 교통분석 프로그램 VISSIM을 통해 제시한 길이기준이 실제적으로 유의한지에 대한 적정성을 검증하기 위해 한국도로공사가 보유한 도로주행 시뮬레이터 실험을 시행하였다. 시뮬레이터는 도로교통 환경을 가상현실(Virtual Reality) 기법으로 구현하고 모의 주행하는 시설이다. 이를 통해 운전차량의 주행경로데이터를 추출하고 엇갈림구간의 교통조건에 따른 주행특성변화를 분석하였다.
1. 도로주행 시뮬레이터 시나리오 설정
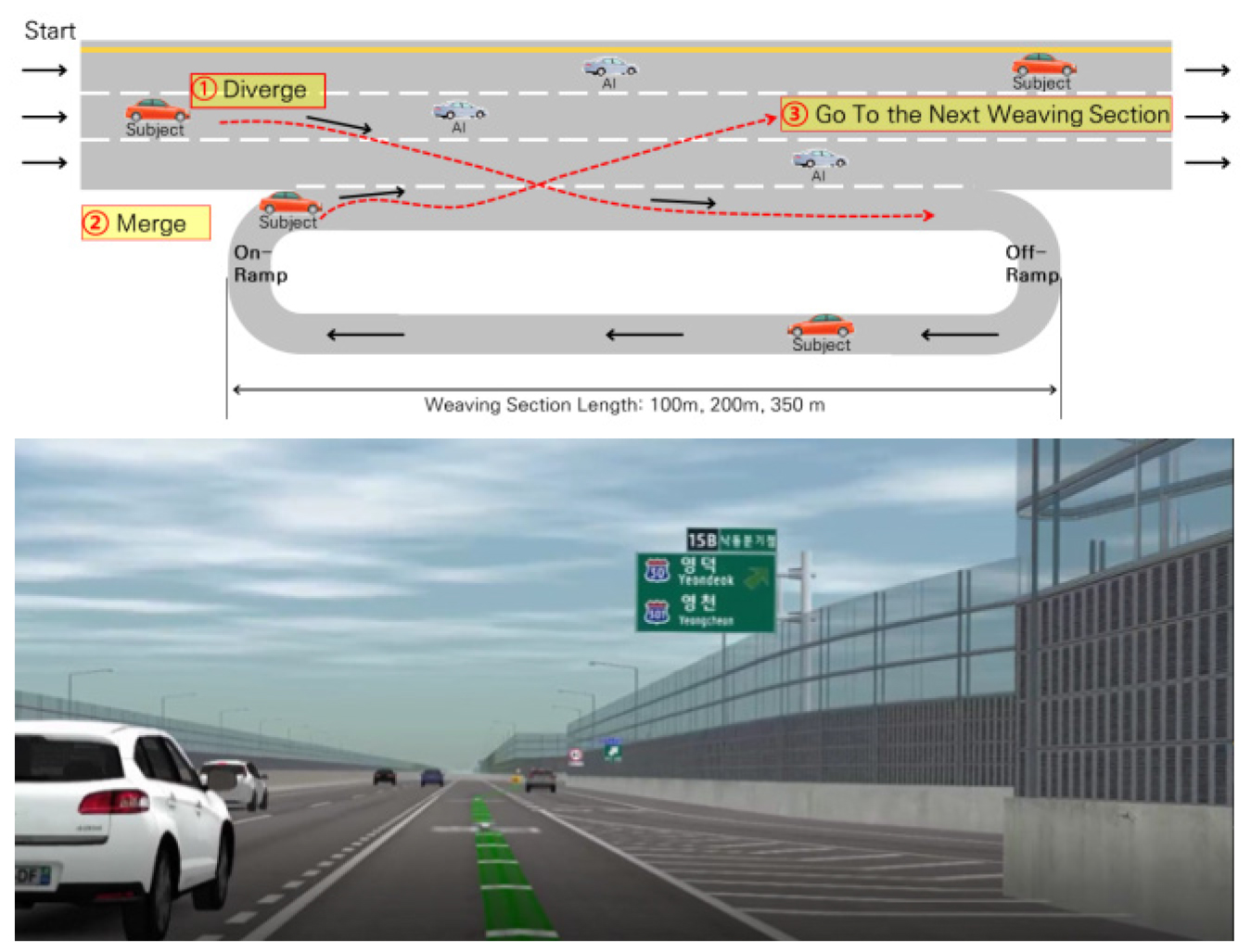
도로주행 대상지는 운전자에게 가장 익숙한 대표적인 엇갈림유형 A-1(낙동JC)으로 선정하였다. 낙동JC는 지방부 소재의 엇갈림구간이므로 지방부 기준, 엇갈림교통량비 0.3, 진출진입비 5:5의 경우에 대한 최소길이 200m 및 권장길이 350m에서의 주행행태를 실제구간길이 100m에서의 주행행태와 비교 분석하였다.
주행실험은 4개의 엇갈림구간을 연속주행하는 시나리오로 구성하였다. 구간길이의 순서는 100m-100m-200m-350m이며, 교통량의 순서는 실측교통량-가상교통량-가상교통량-가상교통량으로 구성하였다. 4개의 엇갈림구간 사이에는 고속도로 기본구간 1km를 주행하도록 설계되었다. 첫 번째 주행 시나리오는 실제 낙동JC의 실측교통량으로 엇갈림구간에 대한 이해를 돕기 위한 목적으로 구성하였고 이는 분석데이터에서 제외하였다. 나머지 3개 시나리오에서는 길이기준의 검증을 위해 구간길이를 제외한 모든 교통조건이 모두 동일하게 적용되었다. 피실험자의 주행경로 데이터를 추출하여 통행속도 및 가감속 주행행태를 비교분석하여 길이기준을 검증하였다. 또한, 피실험자가 시뮬레이터 환경에 적응할 수 있도록 타구간에서 10분간 사전주행을 추가적으로 실시하였다. Figure 6은 주행시나리오와 실제 주행실험에 표출되는 가상 도로교통 환경을 나타낸 것이다.
2. 도로주행 시뮬레이터 피실험자
도로주행 시뮬레이터 실험은 2021년 9월 2-7일까지 평일 4일간 진행되었다. 피실험자는 실제 운전면허보유 연령대 및 성별 비율에 맞추어 31명을 모집하였다. Table 9는 피실험자의 성별, 나이, 운전경력에 대한 분포를 나타낸 것이다.
Table 9.
The distribution of test subjects
3. Speed and Acceleration Profile 분석을 통한 엇갈림구간 길이기준의 적정성 검증
도로주행 시뮬레이터 실험을 통해 추출한 운전차량의 주행경로데이터를 바탕으로 Speed Profile과 Acceleration Profile을 분석하였다. 도로구간을 10m 단위로 구분한 뒤 각 위치에서의 속도와 감가속도의 평균값 및 표준편차를 분석하였다. 진출주행과 진입주행 경우에 따라 분석을 실시하여 총 4개의 분석결과를 제시하였다. Figure 7은 각 주행상황에 대해 차량이 실제로 지나간 위치에서의 분석값의 크기를 히트맵으로 표현하고, 엇갈림구간 이동거리에 따른 평균값을 그래프로 나타낸 것이다. Table 10은 각 주행상황에서의 평균값과 표준편차를 제시한 것으로, 분산분석(Analysis of Variance, ANOVA)을 통해 결과값에 대한 통계적 유의성을 검증하였다. 실험분석결과는 본 연구에서 제시한 길이기준이 엇갈림구간의 효율적인 운영에 유용하다는 것을 보여주고 있다.
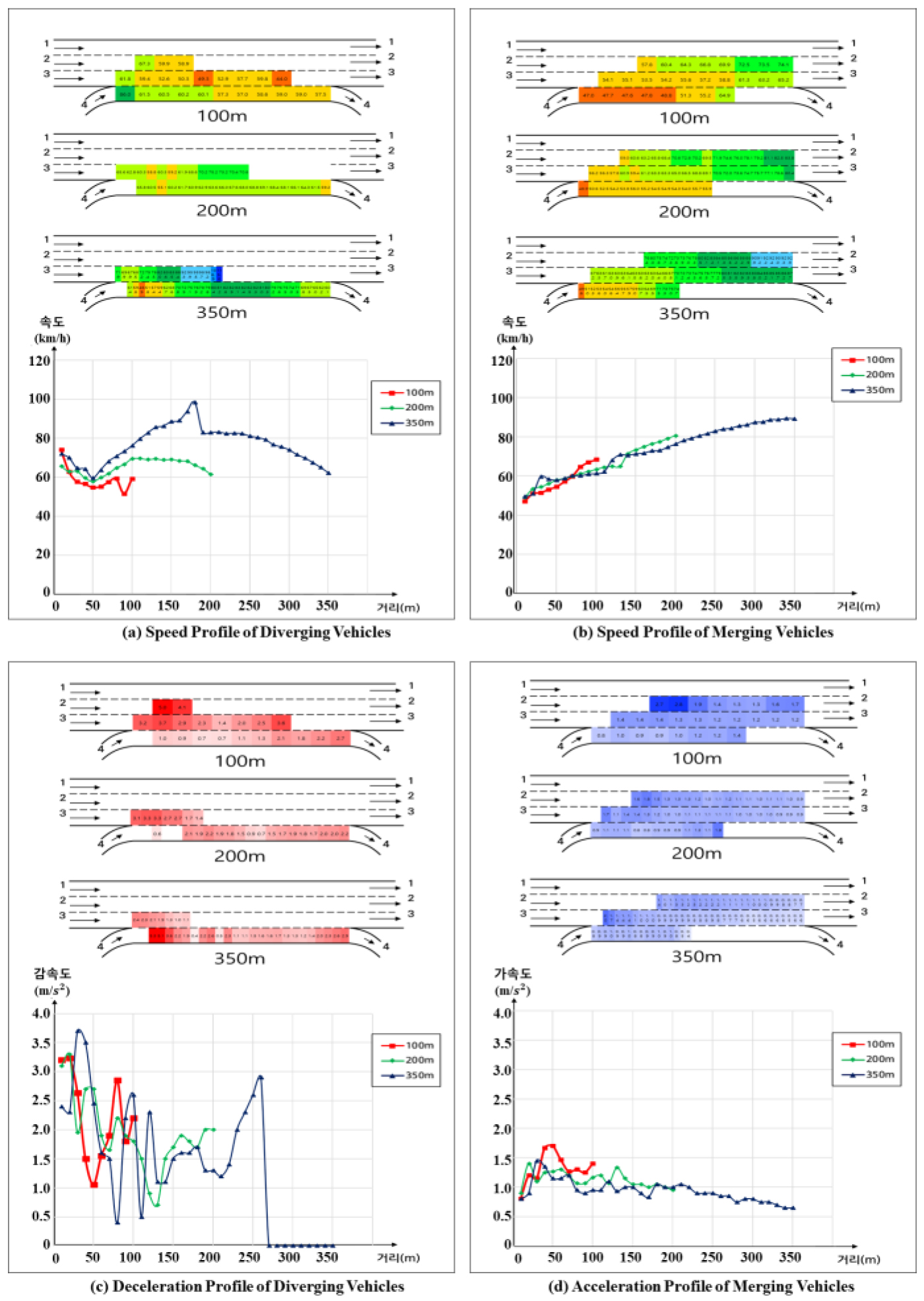
Table 10.
Estimated result of speed and acceleration profiles by weaving section length
Figure 7(a)에 제시된 본선진출 주행상황에서의 Speed Profile 분석결과, 구간길이가 100m에서 350m로 연장됨에 따라 엇갈림구간 내 평균속도는 58.3km/h에서 68.1km/h로 증가하였다. 구간길이가 100m인 경우 차량이 이동함에 따라 구간위치별 속도의 변화폭이 큰 것으로 분석되었다. 반면, 구간길이가 200m 및 350m로 증가한 경우에는 속도의 변화폭이 완만하여 안정적으로 주행한 것을 확인하였다.
Figure 7(b)에 제시된 본선진입 주행상황에서의 Speed Profile 분석결과, 구간길이가 100m에서 350m로 연장됨에 따라 엇갈림구간 내 평균속도는 54.8km/h에서 64.8km/h로 증가하였다. 구간길이가 증가함에 따라 주행차량은 충분히 가속하여 80km/h 이상의 속력을 확보하고 본선에 합류하는 것으로 분석되었다. 이는 진입차량과 본선 통과차량 간 상충 위험이 낮아지는 것으로 해석할 수 있다.
Figure 7(c)에 제시된 본선진출 주행상황에서의 Deceleration Profile 분석결과, 구간길이가 100m에서 350m로 연장됨에 따라 엇갈림구간 내 평균감속도의 크기가 1.82m/s2에서 1.44m/s2으로 감소하였다. 구간길이가 증가함에 따라 진출차량은 상대적으로 완만하게 감속하는 주행행태를 보이고, 이는 차로변경 시 급감속에 따른 사고발생 위험이 감소하는 것으로 해석할 수 있다.
Figure 7(d)에 제시된 본선진입 주행상황에서의 Acceleration Profile 분석결과, 구간길이가 100m에서 350m로 연장됨에 따라 구간 내 평균가속도의 크기는 1.52m/s2에서 1.23m/s2로 감소하였다. 구간길이가 증가함에 따라 진입차량은 상대적으로 완만하게 가속하는 주행행태를 보이고, 이는 차로변경 시 급가속에 따른 사고발생 위험이 감소하는 것으로 해석할 수 있다.
결론 및 제언
본 연구에서는 미시교통시뮬레이션 프로그램 VISSIM을 활용하여 엇갈림구간의 효율적 운영을 위한 적정길이기준을 제시하였다. 엇갈림유형별 주행특성을 분석하기 위해 VISSIM의 차량추종모형과 차로변경모형을 구축하였고 유전알고리즘 최적화기법을 적용하여 현장관측자료를 모사하였다. KHCM과 VISSIM의 시나리오 분석결과는 상이하게 도출되었다. 이는 KHCM은 통계적기법으로 구현한 경험식에 의해 분석결과를 도출한 반면, VISSIM은 엇갈림구간 내 차로변경에 따른 급가감속 주행 등의 임의적 통행행태를 반영한 합리적인 결과를 도출한 것으로 판단된다. 엇갈림구간의 지체는 (1)구간길이가 짧고, (2)교통량이 많으며, (3)엇갈림교통량비가 높고, (4)진출차량비율이 높을수록 악화되는 것으로 분석되었다. 엇갈림구간 길이 설계기준은 고속도로 기본구간에서의 LOS가 유지되어 안정적인 교통류가 지속될 수 있는 구간길이의 범위로 선정하였다. 엇갈림구간의 기하구조적 형태에 따른 유형별 설계 길이기준의 범위는 다양하게 분포함을 확인하였다. 길이기준의 적정성은 도로주행 시뮬레이터를 활용하여 검증하였다.
엇갈림구간의 교통운영과 안전을 확보하기 위해서는 엇갈림구간에서의 주행특성을 이해하고 도로설계단계에서부터 도로구조와 교통수요의 관계에 대해 면밀한 검토분석을 시행한 후 설계되어야 한다. 이에 다양한 교통조건에 대한 엇갈림구간 실측자료를 충분히 수집하여야 할 것이나, 이는 시간적ㆍ재정적으로 어려움이 따른다. 따라서 시뮬레이션 분석을 채택하였으며, 분석결과에 대한 신뢰성을 높이기 위해 도로주행 시뮬레이터로 검증하였다. 또한 설계기준 분석결과에 대한 근거를 뒷받침할 수 있도록 이론적 연구가 수반되어야 할 것이다. 엇갈림구간은 주변 도로와의 연계성, 지역적 특성, 그리고 운전자의 도로주행특성에 크게 영향을 받는다. 또한 부지공간이 부족하여 엇갈림구간의 설계가 어려운 상황에 노면표시 및 표지봉 등의 교통안전시설을 구축하거나 통행속도를 제한하는 등의 실질적인 운영방안을 고려하면 엇갈림구간을 더 효율적으로 운영할 수 있을 것으로 기대된다.
