

서론
최근 교통 시뮬레이션에서는 인간 운전자와 유사한 주행 행태를 재현하는 것이 중요한 과제로 부상하고 있다. 인간 운전자 유사성(human-likeness)을 반영한 시뮬레이션은 교통 효율성과 안전성을 보다 현실적으로 평가할 수 있게 할 뿐 아니라, 향후 자율주행차(AV) 행태 모사 및 사회적 수용성 연구에도 활용될 수 있다. 최근 연구들에서도 주행 행태 모델에서의 인간 운전자 유사성의 반영이 교통 효율성과 안전성뿐만 아니라 사회적 수용성에도 필수적임이 강조되고 있다(Yu et al., 2018; Zhu et al., 2018; Xu et al., 2020; Zhang et al., 2022; Zhang et al., 2023). 이러한 맥락에서, 주행 행태 모델은 효율성, 안전성, 인간 운전자 유사성 간의 균형을 달성해야 하며, 이들은 상충되는 관계를 가진다. 따라서 과도하게 보수적인 주행으로 교통 흐름을 저해하지 않으면서도 선제적 안전성을 확보하고, 인간 운전자와 자연스러운 상호작용을 가능하게 하는 것이 요구된다.
이러한 수요에 대응하기 위해 다양한 행태 모델들이 제안되었으나, 대부분은 종방향 차량 추종(car-following)을 1차원적으로 가정하며, 횡방향 움직임과의 상호작용을 간과하는 경향이 있었다. 즉, 단일 차로 내 선행 차량과의 거리 및 속도 유지에만 초점을 맞추어 다차로 교통의 복잡성을 충분히 반영하지 못하였다. 일부 연구에서는 2차원 환경을 고려하였으나, 차량 추종과 차로 변경을 독립적으로 설계하는 경우가 많아 행태의 단절적 전환, 급격한 속도 변화 및 안전성 저하와 같은 문제가 발생하였다. 실제 교통 상황에서는 종방향(차량 추종)과 횡방향(차로 변경) 역학이 본질적으로 상호 의존적이며, 인간 운전자는 두 차원을 동시에 고려하여 부드럽고 조화로운 주행을 수행한다.
따라서 인간과 유사한 주행 행태를 달성하기 위해서는 종방향과 횡방향 상호작용을 동시에 포착할 수 있는 통합 모델링 프레임워크가 필요하다. 기존 연구들 또한 인간과 유사한 주행 특성을 모사하기 위해 다양한 시도를 해왔으며, 일부는 교통 시뮬레이션 내 자율주행 차량 구현의 맥락에서 제안되었다. 그러나 이러한 연구들은 곧바로 자율주행차의 제어 알고리즘에 적용되기 보다는, 시뮬레이션 환경에서 자율주행차의 행태를 보다 현실적으로 표현하기 위한 접근으로 이해할 수 있다. 본 연구 역시 자율주행차의 실차 제어 규칙을 제시하는 것이 아니라 교통 시뮬레이션 환경에서 인간 유사적이고 교통류에 부정적 영향을 최소화하는 주행 행태를 재현하는 모델 개발에 중점을 두었다. 이를 통해 교통 시뮬레이션의 현실성을 높이는 동시에, 자율주행차 행태 모사 연구의 기반 모델로 활용될 수 있는 가능성을 제시한다.
이에 본 연구는 차량 추종과 차로 변경 행태를 통합적으로 반영한 2차원 주행 행태 모델을 제안한다. 제안된 모델은 주변 여러 차량의 공간적 근접성과 안전성을 동적으로 가중치화하였고, 이를 통해 교통 안정성과 안전성을 동시에 반영하는 인간과 유사한 주행 행태를 재현하고자 한다. 더 나아가, 제안 모델은 상황에 따라 차로 변경을 실행, 지연, 혹은 취소할 수 있도록 설계되어, 불확실한 교통 흐름 하에서 나타나는 현실적인 주저와 적응을 포착한다. 최종적으로 제안된 모델은 교통 시뮬레이션 환경에서 인간과 유사한 주행 행태를 효과적으로 모사·표현하는 데 초점을 둔다.
본 논문의 구성은 다음과 같다. 우선 선행연구를 종합적으로 검토한 뒤, 종방향 차량 추종과 횡방향 차로 변경을 하나의 통합된 프레임워크에서 구현한 가속도 모델을 제시한다. 이후 시뮬레이션 실험을 통해 제안 모델의 성능을 교통 안정성, 안전성, 인간 운전자 행태 모사 측면에서 평가한다. 마지막으로 결론에서는 연구의 주요 시사점과 향후 연구 방향을 논의한다.
선행연구
본 절에서는 인간과 유사한 주행 행태를 고려한 2차원 주행 행태 모델링 관련 기존 연구들을 검토한다. 인간 운전자와 유사한 주행 행태를 고려한 2차원 주행 모델링 연구는 크게 인공지능 기반 접근과 규칙·모형 기반 접근으로 구분할 수 있다.
먼저, 딥러닝이나 강화학습과 같은 인공지능 기반 기법을 활용하는 방법은 최근 몇 년간 AI 기반 모델링 연구의 급격한 증가와 더불어 다양한 분야 연구자들의 주목을 받고 있다. Zhang et al.(2022)은 다중 에이전트 심층 강화학습을 활용한 의사결정 모듈과 협상 기반 우선권(right-of-way) 모델을 결합한 이중 단계 차로 변경 계획 프레임워크를 제안하였다. El Sallab et al.(2017)은 원시 센서 입력값으로부터 자율주행 행태를 학습하는 심층 강화학습 프레임워크를 제안하였다. Xie et al.(2019)은 의사결정을 위한 심층 신경망(deep belief network)과 궤적 생성을 위한 LSTM을 결합한 차로 변경 모델을 개발하여 높은 정확도를 달성하였다. Zhang et al.(2019)은 차량 궤적 데이터를 활용하여 차량 추종과 차로 변경 행태를 동시에 학습하는 LSTM 기반 모델을 제시하였다. 이러한 AI 기반 모델들은 고도화된 성능을 보이지만, 학습 모수의 수가 많아 주변 차량이 의사결정 과정에 어떻게 영향을 미치는지를 직관적으로 해석하기 어렵다는 한계가 있다. 특히, 개별 입력값이 최종 주행 행태에 기여하는 정도가 명확하지 않아 모델의 해석 가능성이 극히 제한적이다. 또한, 시뮬레이션의 각 스텝에서 모든 차량에 대해 복잡한 신경망을 실행해야 하므로 계산 비용이 매우 크며, 이는 대규모 네트워크 시뮬레이션이나 실시간 응용에서 성능 저하와 자원 소모 문제로 이어질 수 있다.
두 번째 접근은 규칙 기반 또는 모델 기반 방법으로, 주행 행태 모델링 연구 분야에서 전통적으로 활발하게 연구되어 온 방법론이다. Fu et al.(2019)은 끼어들기 행태(cut-in behavior)와 이에 따른 운전자 반응을 고려하여 인간 운전자와 유사한 차량 추종 모델을 자율주행 및 연결형 차량(connected vehicle)에 적용하였다. Delpiano et al.(2020)은 사회적 힘(social force) 이론과 스프링-댐퍼 시스템(spring-mass-damper system)을 활용하여 반발 상호작용과 차로 변경 의도에 기반한 가속도를 계산하였다. Qi et al.(2022)은 확률 미분방정식과 IDM을 기반으로 확률적 2차원 차량 추종 모델을 개발하였다. 이와 같은 선행연구들은 인간 운전자의 특성을 주행 행태에 반영하는 데 있어 의미 있는 진전을 이루었으나, 종방향과 횡방향 의사결정을 독립적인 모델로 접근하는 경우가 많았다. 이러한 분리된 구조는 두 차원 간 상호작용을 포착하는 데 한계를 가질 수 있다. 반면, 종방향과 횡방향을 상호의존적으로 고려한 모델링 연구도 존재한다. Sharath and Velaga(2020)는 1차원 차량추종 모델인 Intelligent Driver Model(Treiber et al., 2000)을 확장하여 주변 차량과의 유효 간격을 반영하는 2차원 모델을 제안하였다. 이와 같은 접근은 공통된 변수를 기반으로 양 방향을 동시에 고려함으로써 주행 과정에서 보다 일관된 의사결정을 가능하게 한다.
본 연구 역시 종횡방향을 상호의존적으로 고려하기 위해 공통 변수인 관계 변수(relational variables)를 활용하며, 시뮬레이션의 확장성과 실용성, 모수 조정 용이성 등의 장점을 갖는 모델 기반 접근을 따른다. 주행 차량과 주변 차량간의 관계 변수를 도출하여 이를 종방향 및 횡방향 가속도 산출에 반영함으로써 일관적이고 상호 연계된 행태를 구현한다. 더 나아가, 제안 모델은 상황에 따라 차로 변경을 지연하거나 취소하는 행태를 재현할 수 있어, 인간 운전자와 유사한 주행 특성을 모사할 수 있다.
연구방법
본 연구는 주변 차량을 인지하고 협력하는 인간의 주행 행태를 모사할 수 있는 2차원 자율주행 모델을 제안한다. 제안 모델은 Figure 1에 나타난 프로세스를 통해 차량 추종과 차로 변경 행태를 재현하기 위해 종방향 및 횡방향 가속도를 함께 결정한다. 이때 세 종류의 주변 차량을 고려하는데, 각각 현재 차로의 선행 차량(LO), 목표 차로의 선행 차량(LT), 그리고 목표 차로의 후행 차량(FT)이다. LO, LT를 고려하는 것은 차량 추종 관점에서 주행 차량의 안전성 확보에 도움을 주며, FT를 고려함으로써 차로 변경 행태가 후행 차량에 미칠 영향을 예측하고, 합류나 차로 변경 시 발생할 수 있는 교통 흐름의 교란을 최소화할 수 있다.
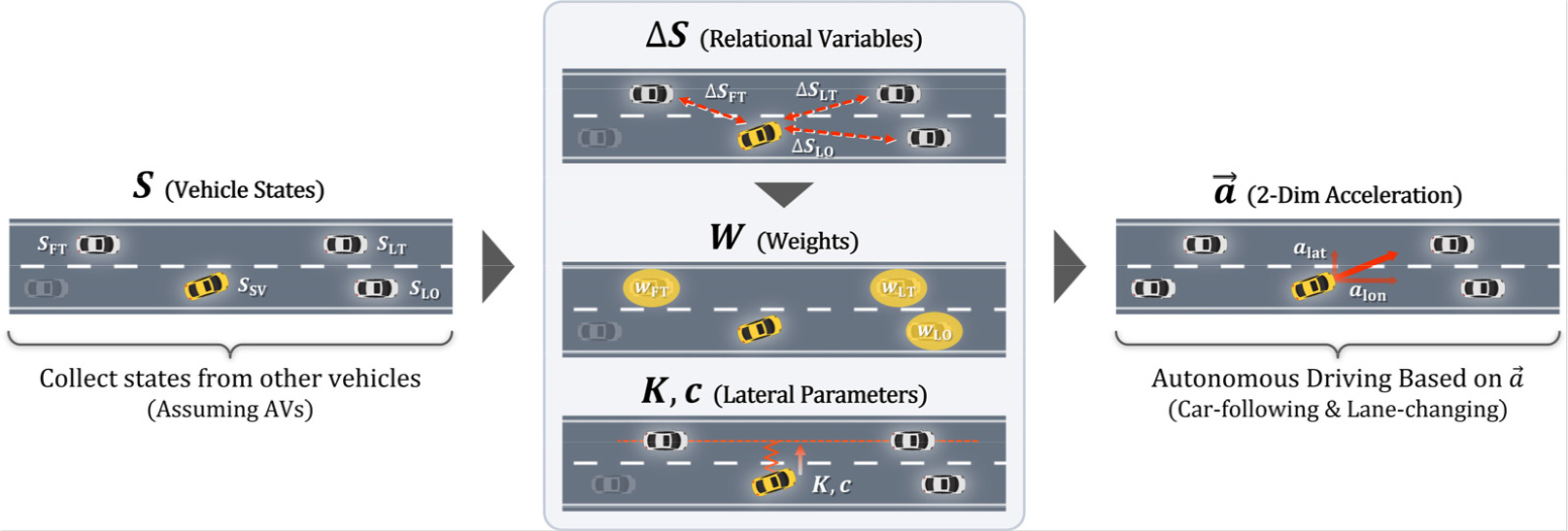
SV를 비롯한 주변 차량들은 위치, 속도 등으로 구성된 상태 값 를 가지며, 값을 기반으로 SV와 주변 차량 각각에 대해 두 챠랑 간의 상호작용 정도를 정량화 할 수 있는 관계변수 를 도출한다. 계산된 는 각 차량이 SV의 종·횡방향 의사결정에 미치는 모수 값()을 결정하기 위해 사용된다. 최종적으로 종방향 가속도와 횡방향 가속도를 결정하게 된다. 각 과정에 대한 구체적인 내용은 뒤에서 다루며, 이후 설명에서 사용되는 주요 기호와 의미를 Table 1에 제시하였다.
Table 1.
Notations and descriptions
1. 이론적 배경
1) 비대칭 반발력 모델(ARM)
비대칭 반발력 모델(ARM; Asymmetric Repulsive Force Model)은 가속과 감속 주행의 비대칭적 특성을 고려하여 인간 운전자의 행태를 포착하는 1차원 차량 추종 모델이다(Kim and Yeo, 2024). 비대칭 이론에 따르면 운전자는 일반적으로 감속(deceleration) 상황보다 가속(acceleration) 상황에서 보수적으로 행동하는 경향을 보인다. 예를 들어, 운전자는 선행 차량이 갑작스럽게 정지할 가능성에 대비하여 감속 상황보다 가속 상황에서 더 큰 안전 간격을 유지하려 한다. 가속과 감속 행태의 다소 불연속적인 전환과정에서 운전자는 선행 차량의 움직임에 관계 없이 일정한 속도를 유지하는 관성 주행(coasting)을 한다. Yeo et al.(2008)에 따르면 관성 주행을 통해 교통 이력 현상(traffic hysteresis), 주기적인 가다서다 행태(stop-and-go), 도로의 일시적인 용량 감소(capacity drop) 등의 다양한 교통 현상을 이론적으로 설명할 수 있다. ARM은 관성 주행 행태를 충분히 모사할 수 있으며, 거시적 관점에서 다양한 교통 현상들의 재현 가능성을 증명하였다.
Figure 2는 속도-차간거리(speed-spacing) 평면에서 ARM의 모델링 개념을 시작적으로 제시한다. ARM은 관성 주행 구간(coasting zone)을 운전자의 빠른 주행에 대한 욕구를 충족함과 동시에 안전성을 보장하는 구간으로 본다. 이 구간은 A-curve, D-curve, 주행 목표 속도(desired speed, )로 둘러싸여 있으며, A-curve와 D-curve는 각각 가속과 감속 시 선행차량과의 충돌을 방지하기 위한 주행 차량의 속도-차간거리 조건을 나타낸다. 주행 목표 속도는 도로의 자유흐름속도(free-flow speed)와 운전자의 선호 속도에 따라 결정된다. 관성 주행 구간 내에서 차량은 충분한 안전거리를 유지하여 주행 안전을 확보하고, 선행 차량으로부터 지나치게 멀어지거나 과도한 과속 없이 주행하게 된다.
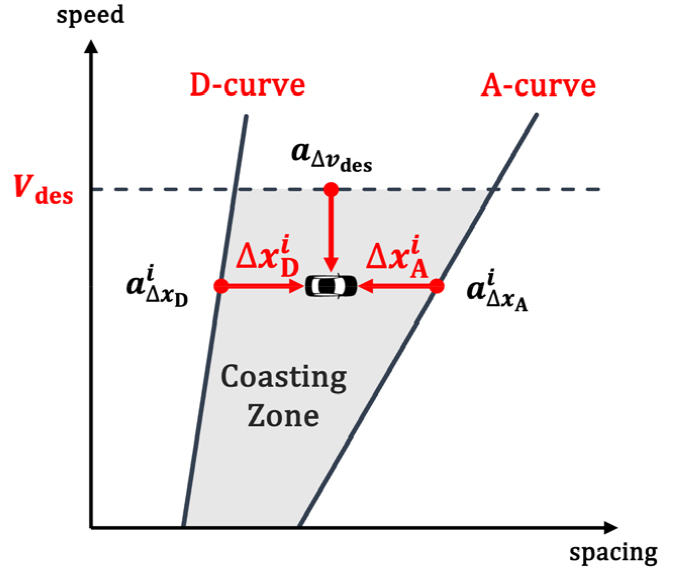
ARM은 주행 차량이 관성 주행 구간을 벗어나려는 상황에서, 각 경계로부터 기인하는 반발력을 통해 차량을 해당 구간으로 되돌린다. 선행 차량 와 함께 주행하는 상황에서 각 경계에서의 반발력()은 해당 경계로부터 차량까지의 거리()에 대한 함수로 정의되며, 와 는 Equation 1, 2와 같이 정의된다.
여기서 는 선행 차량 와의 종방향 차간거리를 의미하며, , 는 주행 차량이 속도 로 주행 할 때 A-curve, D-curve에서 산출된 안전거리를 의미한다.
최종적으로 차량의 종방향 가속도()는 Equation 3과 같이 반발력들의 합으로 결정된다.
2) 스프링-질량-댐퍼(SMD) 시스템
스프링-질량-댐퍼(SMD; Spring-Mass-Damper) 시스템은 스프링과 댐퍼를 이용하여 질량체를 평형 위치로 되돌리면서 진동을 제어하는 물리적 시스템이다. 이 시스템에서 변위 와 속도 에 따라 질량을 움직이기 위해 필요한 힘은 Equation 4와 같이 표현된다.
스프링 계수 는 질량체를 평형 위치로 복원시키는 힘의 크기를, 감쇠 계수 는 속도에 따른 저항 효과를 나타낸다. 두 계수를 조절함으로써 질량체가 원래 위치로 되돌아가는 궤적을 제어할 수 있다. 특히, 와 가 임계 감쇠 조건()을 만족할 때 시스템은 진동 없이 가능한 한 빠르고 안정적으로 평형 상태에 도달한다.
이러한 특성은 차량의 횡방향 이동 행태와 유사하다. 차로 변경을 수행 할 때 목표 차로를 평형 위치로 설정하면, 차량은 현재 차로 중심선으로부터의 횡방향 거리와 속도에 따라 평형 위치로 이동하려는 힘을 받는다고 볼 수 있다. SMD 시스템은 이 과정에서 차량의 횡방향 궤적을 안정적이고 부드럽게 설명할 수 있는 물리적 근거를 제공한다. 실제로 Delpiano et al.(2020)은 해당 시스템을 기반으로 차량의 횡방향 움직임을 모델링하여 그 효과를 입증한 바 있다.
2. 관계 변수 (Relational Variable)
제안하는 모델은 SV와 주변 차량 간의 상호작용을 명시적으로 정량화하는 관계 변수(relational variable) 를 기반으로 차량의 종·횡 방향 가속도를 결정한다. 는 주변 차량 {LO, LT, FT}와의 차량 추종 관계를 고려했을 때 계산된 와 쌍으로 구성된다(Figure 2 참조). 여기에서는 각각을 가속 기반, 감속 기반 관계 변수로 정의한다. 가 작을수록 현재 속도에 비해 선행 차량 와의 거리가 충분히 크다는 것을 의미하며, 이는 더 강한 가속이 필요함을 의미한다. 반대로 가 작을 경우 SV가 선행 차량 에 지나치게 근접했음을 나타내며, 안전을 위해 더 강한 감속이 요구된다. 예외적으로, FT에 대한 관계 변수는 FT가 SV를 선행 차량으로 두었을 때의 관점에서 정의된다. 이는 A-curve와 D-curve가 본질적으로 후행 차량이 선행 차량에 대해 요구되는 안전거리를 표현하기 때문이다.
관계 변수는 종방향 및 횡방향 가속도를 계산하고 차량 행태를 조정하는 핵심 입력값으로 사용된다. 입력값을 공유함으로써 종·횡방향 가속도는 서로 다른 수식을 사용함에도 동일한 목표에 의해 제어되며 상호 연계된 행태를 구현한다. 예를 들어, 목표 차로에서 차로 변경을 위한 가용 공간이 부족할 경우 관계 변수는 차량이 종방향으로 감속하면서 동시에 차로 변경을 지연하거나 취소하도록 유도하며, 충분한 간격이 확보될 때까지 대기하게 한다. 제안 모델은 운전자의 비대칭적 특성을 고려한 관계 변수를 통해 주변 차량과 인간 운전자의 특성을 동시에 반영하여, 물리적 맥락과 행태적 비대칭성을 모두 포함한 주행 행태를 구현한다.
3. 2차원 가속도
제안 모델은 앞서 계산된 차량 간 관계 변수를 기반으로 종방향과 횡방향 가속도를 결정한다. 각 방향의 가속도는 독립적인 과정에 의해 산출된다.
1) 종방향 가속도
제안 모델은 Figure 1에 나타난 것처럼 상황에 따라 주변 차량에 서로 다른 가중치를 부여하여 종방향 가속도를 결정한다. 각 차량에 부여되는 가중치는 두 단계 과정을 통해 산출된다. 첫째, 기존 차로와 목표 차로에 대해 거리 기반 가중치와 안전 기반 가중치를 결합하여 차로 수준의 가중치를 계산한다. 둘째, 차로 수준 가중치를 개별 차량에 분배하여 최종 차량 수준 가중치를 얻는다.
먼저, 거리 기반 차로 수준 가중치는 SV와 각 차로 간의 공간적 근접성에 따라 결정된다. 차로 에 대해 거리 기반 차로 수준 가중치 는 Equation 5, 6과 같이 정의된다.
여기서 는 SV와 목표 차로 중심선 사이의 횡방향 거리이며, 𝛼는 가중치 전환의 기울기를 제어하는 민감도 계수이다. 𝛼값이 클수록, SV가 목표 차로에 가까워질수록 목표 차로에 더 가파르게 가중치가 부여된다. 본 연구에서는 차로 수준 가중치의 전환을 연속적이고 점진적으로 표현하기 위해 지수함수의 특성을 활용하였다. 입력 값인 의 변화에 따라 출력이 비선형적으로 급격히 변하면서도 연속성을 보장하기 때문에, 차로변경 차량이 차로 경계에 접근할수록 가중치가 기존 차로에서 목표 차로로 자연스럽게 이동하도록 하는 데 적합하다.
둘째, 안전 기반 차로 수준 가중치 는 차로별 선행 차량과의 안전거리, 충돌 위험성 등을 고려하여 각 선행 차량이 SV에 미치는 상대적 영향을 기반으로 계산되며, Equation 7, 8과 같다.
SV와 주변 차량 𝑖 간의 의 정규화를 통해 차로별 선행 차량 간의 상대적 거리 차이가 SV 관점에서의 상대적 위험도에 반영되고, 이를 기반으로 하는 의사결정에도 반영되도록 하였다..
차로 수준 가중치는 거리 기반 가중치와 안전 기반 가중치를 선형적으로 결합하여 산출된다.
여기서 [0, 1]는 거리 기반 가중치와 안전 기반 가중치의 중요도를 결정하는 민감도 계수이다.
차로 수준 가중치는 다시 개별 차량에 분배되어 최종적으로 차량 수준 가중치가 결정된다. 기존 차로(origin)의 가중치는 LO에 전적으로 부여되며, 목표 차로(target)의 가중치는 LT와 FT에 나누어진다.
여기서 [0, 1]는 횡방향 이동 중 LT와 FT의 상대적 중요도를 결정하는 민감도 계수이다. 𝛾가 작을 경우, LT와의 안전 거리가 충분히 확보되지 않으며, 𝛾가 지나치게 클 경우, LT와의 안전거리는 충분히 확보되지만, FT와의 충돌 위험성이 커지게 된다. LO와 LT가 SV의 주행에 의해 영향을 받지 않는 것과 달리, FT 관점에서 SV가 선행 차량이 될 수 있으므로, 두 차량의 움직임은 상호의존적이다. 이는 SV의 안전을 위협할 뿐 아니라 FT의 갑작스러운 감속으로 이어져 전체 교통에 큰 영향을 줄 수 있다. 𝛾값의 조정을 통해 주행 차량의 안전하고 매끄러운 차로 변경 뿐 아니라, 후행 차량 및 전체 교통에 미치는 부정적 영향을 최소함으로써 차로 변경 과정에서 운전자의 이타적 행태를 구현할 수 있다.
최종적으로 SV는 각 주변 차량의 A-curve, D-curve에서의 반발력의 가중치 합과 주행 목표 속도를 고려하여 종방향 가속도를 결정한다. 여기에서 FT에 부여되는 가중치는 음수로 반영되어 FT의 가속도 변동 부담을 완화하도록 하였다.
2) 횡방향 가속도
횡방향 가속도는 SV가 상황에 따라 차로 유지와 차로 변경과 같은 다양한 주행 행태를 수행할 수 있도록 한다. 이를 통해 SV는 차로 변경 속도를 조정하거나, 환경 조건에 따라 차로 변경을 포기하는 등 유연한 대응이 가능하다.
횡방향 가속도는 SMD 시스템을 기반으로 모델링된다. 본 연구에서는 Table 2와 같이 SMD 시스템을 2차원 주행 환경에 맞게 변형하였다. SMD 시스템의 각 요소를 주행 환경에 대입하면, 질량체는 차량, 평형 위치는 목표 차로, 변위와 속도는 각각 목표 차로까지의 횡방향 거리 및 횡방향 속도에 해당한다. 따라서 SV는 SMD 시스템에 기반하여 목표 차로로의 움직임을 유도하는 횡방향 가속도를 계산하며, 이는 Equation 12와 같이 정의된다.
Table 2.
Comparison between physical systems and their adaptation to driving environments
여기서 은 SV로부터 목표 차로까지의 횡방향 거리, 은 SV의 횡방향 속도를 의미한다. 위 식에서 는 목표 차로로 이동하려는 의지를 나타내는 계수이고, 는 횡방향 움직임의 안정성을 제어하는 계수이다. 값이 클수록 감쇠 효과가 강해져 차로 변경 속도가 느려지고 궤적이 보수적으로 나타나며, 반대로 값이 작을수록 감쇠 효과가 약해져 차로 변경이 빠르고 공격적으로 수행된다. 본 연구에서는 값을 상수로 설정함으로써 차로 변경 과정이 과도하게 빠르거나 지연되지 않고, 안정적이고 현실적인 궤적을 재현할 수 있도록 하였다. 향후 연구에서는 운전자의 공격성 수준이나 주행 성향을 고려하여 값을 조정함으로써 다양한 차로 변경 특성을 반영할 수 있을 것이다.
는 목표 차로로 이동하려는 의지를 나타내며, 값이 클수록 과감하게 목표 차로로 이동하며, 작을수록 차로 변경을 주저하거나 수행 속도가 느려진다. 값은 주변 환경에 따라 달라지며, 차로 변경 행태의 다양성을 구현할 수 있다. 목표 차로 내 차량의 영향이 미미할 때, 임계 감쇠 조건을 만족하는 값으로 안정적인 차로 변경을 지원할 수 있으며, 반대로 LT와 FT의 영향이 강해질수록, 값을 줄여 차로 변경을 억제하거나 지연시킬 수 있다. 제안 모델은 값을 결정하기 위해 LT와 FT의 감속 기반 관계변수(, )를 활용하여 LT와 FT에 대해 횡방향 영향 성분 을 계산한다. 각 성분은 해당 차량이 SV의 횡방향 이동에 주는 영향을 정량화한 것으로 Equation 13과 같이 정의된다.
여기서 는 변화율을 제어하는 가파름(steepness) 계수이고, 는 상대적 중요도를 반영하는 영향 조정 계수이다. 는 SV가 차량 의 영향을 얼마나 급격하게 혹은 점진적으로 반영할지를 제어한다. 는 의 최대값을 조정하여 각 차량의 상대적 중요도를 반영한다. 본 모델에서는 를 보다 크게 설정하여, SV가 차로 변경 의도를 결정할 때 FT의 영향을 더 크게 고려하도록 한다. 또한, 주변 차량의 영향이 미미할 때 가 임계 감쇠 값으로 수렴하도록 하기 위해, 와 는 각 값에 따라 최종 값이 목표하는 임계 감쇠 조건 값에 수렴할 수 있도록 조정하여, 두 차량이 모두 횡방향 움직임에 기여하도록 보장한다. 최종 값은 LT와 FT에 대한 성분을 합산하여 얻어진다.
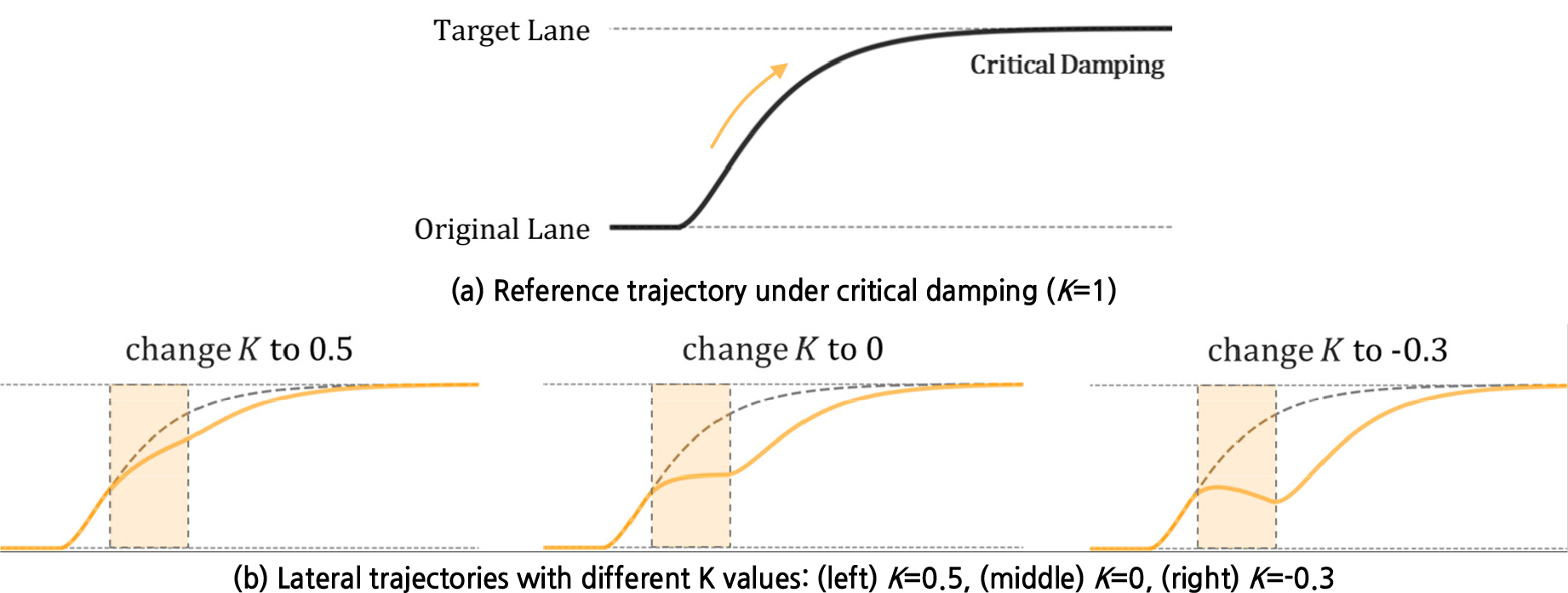
Figure 3는 값이 고정된 상황에서 값의 변화가 횡방향 궤적에 미치는 영향을 보여준다(=2). =1일 때 기존 궤적은 임계 감쇠 조건을 만족한 경우를 나타내며, 부드럽고 안정적인 차로 변경을 수행한다. Figure 3(b)는 의 변화에 따른 차로 변경 행태를 보여준다. 값이 줄어듦에 따라 횡방향 이동 속도가 느려지고 차로 변경까지 걸리는 시간이 길어지며, =0일 경우 지연된 반응이 뚜렷하게 나타난다. 가 음수일 경우에는 차량이 목표 차로로 이동하려는 움직임을 중단하고 기존 차로로 되돌아가려는 경향을 보이며, 차로 변경 연기 또는 차로 변경 포기와 같은 행태를 암시한다.
Equations 12, 14를 통해 제안 모델의 횡방향 가속도는 Equation 15와 같이 결정된다.
실험 설계
본 연구에서는 제안 모델이 차량의 종방향 및 횡방향 주행 행태를 얼마나 효과적으로 재현할 수 있는지를 평가하였다. 실험적 확인을 통해 모수 대푯값을 결정하였으며, 과도한 변동을 방지하고자, 우선적으로 를 상수값 2로 고정하였다. 이 값에서 임계 감쇠(critical damping)를 가정했을 때, 차로 변경에 소요되는 시간은 약 5초 내외였으며, 선행연구를 통해 밝혀진 차로 변경 시간과도 유사한 수치를 보였다(Toledo and Zohar, 2007, Yang et al., 2019). 그 외의 모수들은 다양한 시뮬레이션 시나리오에서 단일 차량의 주행 궤적과 가속도 반응을 반복적으로 관찰·분석하여, 인간 운전자의 합리적인 주행 행태와 가장 근접하게 재현되는 값을 선정하였다. 최종적으로 결정된 모수 값은 Table 3에 요약되어 있다.
Table 3.
Model’s parameters
본 실험은 종방향 가속도를 결정하는 핵심 요인인 가중치 모수의 효과성을 검증하는 것을 목표로 한다. 대조 모델(Baseline)은 SMD 시스템을 기반으로 한 기존 차로 변경 모델과 차량 추종 모델로 ARM을 결합하여 사용하였다. 대조 모델(Baseline)과 제안 모델(Proposed)은 동일하게 ARM과 SMD 시스템을 기반으로 하지만, 주변 차량 처리 방식에서 차이가 있다. 대조 모델은 단일 선행 차량만 고려하여 가속도를 결정하는 이산적 의사결정 과정을 사용하는 반면, 제안 모델은 여러 주변 차량을 동시에 고려하는 가중치 기반 방식을 채택하였다.
Figure 4에 나타난 바와 같이, 본 실험에서는 다수의 주변 차량이 존재하는 도로에서 차로 변경을 수행하는 상황을 설정하였다. 모든 시뮬레이션은 2차로 도로 네트워크에서 수행되었으며, 일관성을 위해 모든 차량의 값은 동일하게 2로 설정하였다. 그 외의 주변차량 모수는 임의로 할당되었다. 우측 차로(Figure 4 기준 하단 차로)에 위치한 SV는 좌측 차로(Figure 4 기준 상단 차로)로의 차로 변경을 수행해야 한다. 분석은 제안 모델과 대조 모델 모두에서 차로 변경이 성공적으로 완료된 500개의 사례를 기반으로 수행되었다.

본 연구에서는 제안 모델의 성능을 평가하기 위해 4가지 평가 기준(안정성, 안전성, 승차감, 유연성)을 설정하였다. 각 기준은 총 5개의 정량적 지표로 측정된다.
결과 및 논의
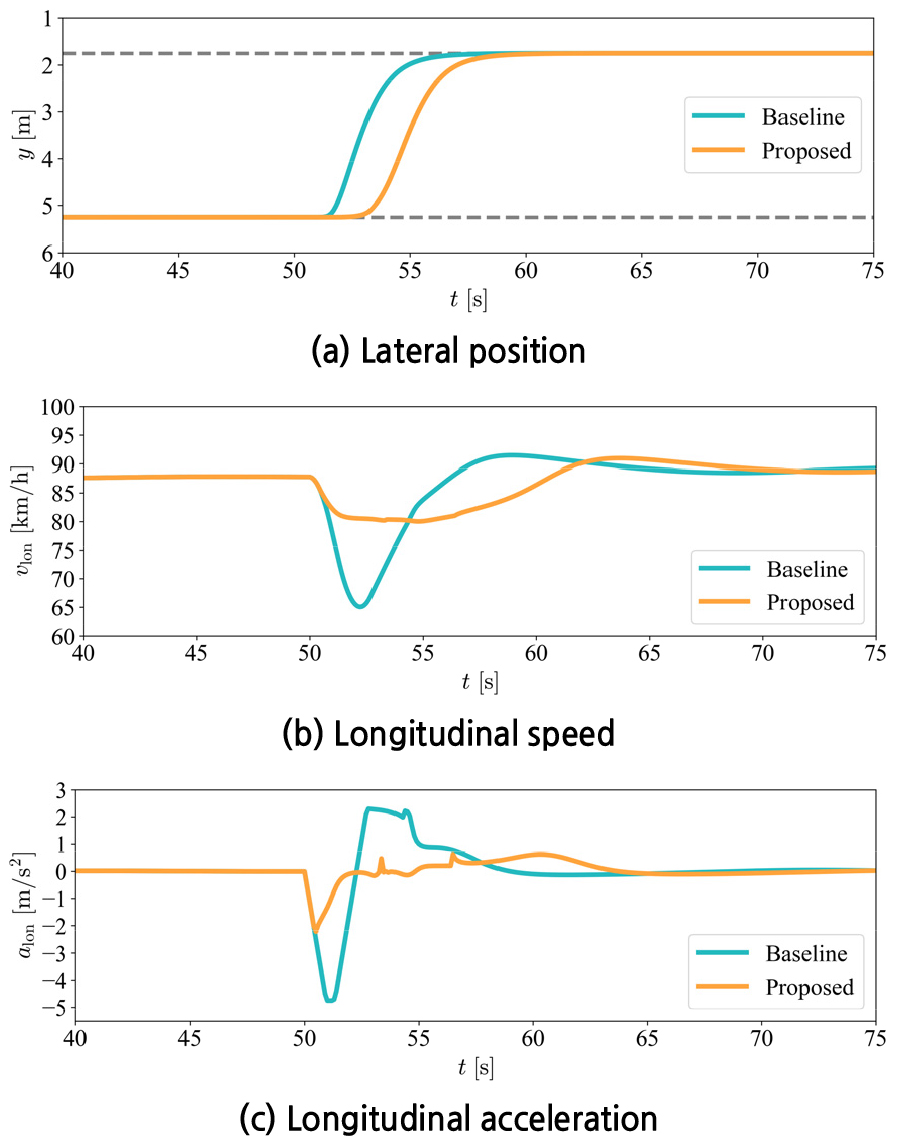
Figure 5는 제안 모델과 대조 모델의 차로 변경 사례로, 각각 SV의 횡방향 위치, 종방향 속도, 가속도 궤적을 나타낸 것이다. 횡방향 위치 측면에서 대조 모델은 제안 모델보다 이른 시점에 차로 변경을 더 일찍 시작하였다. 그러나 차로 변경을 시작한 직후 선행 차량이 LO에서 LT로 전환되며 급격하게 감속하는 모습을 보인다. 반면, 제안 모델은 차로 변경을 시작한 이후에도 보다 점진적인 속도와 가속도 변화를 보이며, 제안 모델이 보다 안정적인 차로 변경 행태를 모사할 수 있음을 보여준다.
이러한 개별 차량 수준의 개선은 전체 교통 환경에서도 동일하게 관측되었다. 특히, SV의 차로 변경이 덜 급작스럽게 이루어짐에 따라 주변 교통, 즉 상류부로 전파되는 교란이 완화되었다. 이러한 차이는 Figure 6에 제시된 결과에서도 확인된다. 해당 그림은 SV의 차로 변경 행태가 상류부 차량들에 미치는 영향을 분석한 것이다. 먼저, 제안 모델의 경우 (Figure 6(a), (b)), SV의 차로 변경 과정에서 일시적인 감속이 발생하였으나, 상류 차량들의 반응은 점진적이고 작은 폭에서 이루어져 교통류 전반의 안정성이 유지됨을 확인할 수 있다. 이는 제안 모델이 주변 차량에 동적으로 가중치를 부여함으로써 차로 변경 시 불필요한 급제동을 억제하고, 결과적으로 교통류의 충격파 전파를 최소화한 것으로 해석된다.
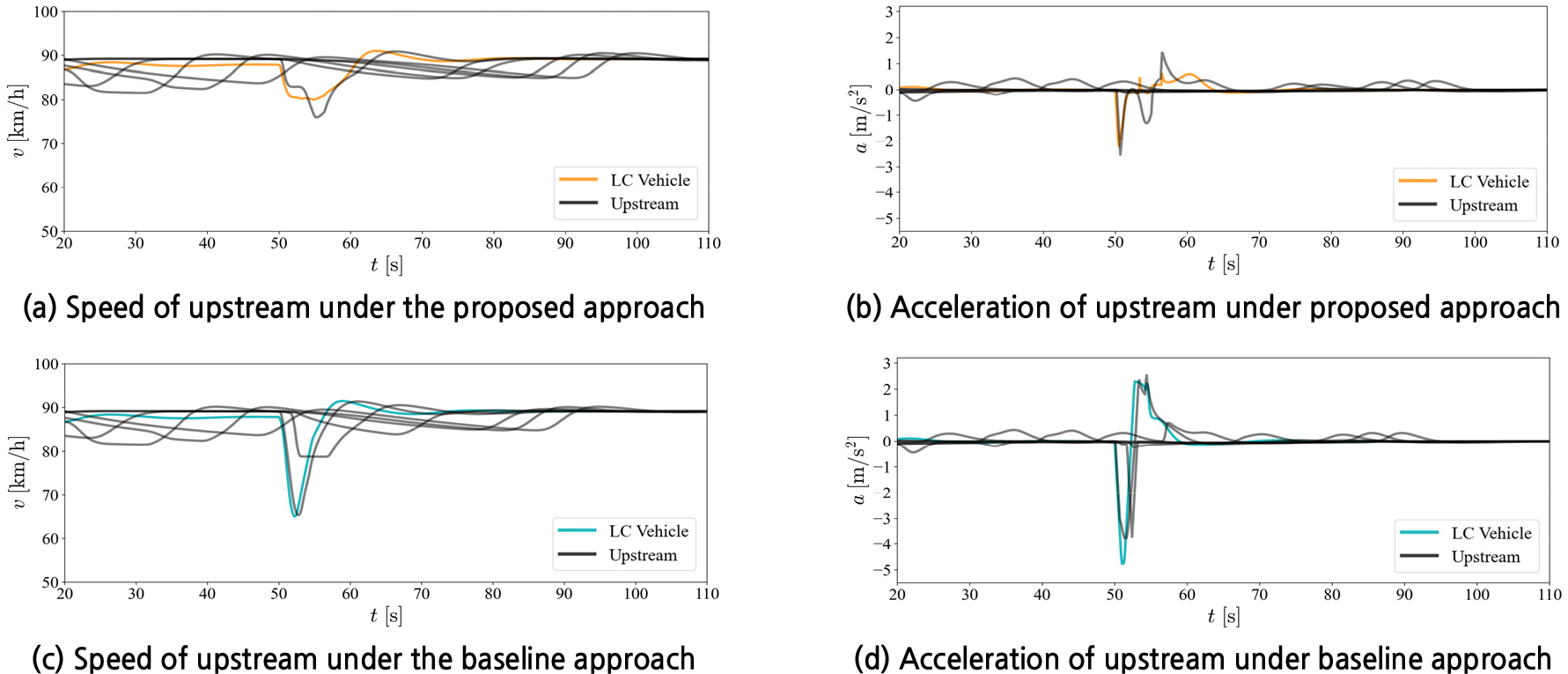
반면, 대조 모델의 경우(Figure 6(c), (d)), SV가 차로 변경을 시도한 직후 SV의 후행차량의 속도와 가속도에서 더 큰 폭의 변동이 발생하였다. 특히, 선행 차량 전환 과정에서 SV의 급감속이 나타나면서 후행 차량의 속도 저하가 크게 발생했으며, 가속도 곡선에서도 -3~4 m/s2 수준의 급격한 진동이 발생하였다. 이러한 현상은 대조 모델이 단일 선행 차량만을 고려하는 이산적 의사결정 방식에 기초하기 때문에, 차로 변경 시 주변 차량들의 연속적 상호작용을 충분히 반영하지 못한 결과로 볼 수 있다.
Table 4는 5개의 정량적 성능 지표를 통해 500번의 시뮬레이션에서 차로 변경 행태의 영향을 요약한 것이다. 우선, 은 SV가 차로 변경을 수행하는 동안의 최소 종방향 가속도를 나타내며, 값이 작을수록 더 심한 감속과 낮은 안정성을 의미한다. 또한, SV의 차로 변경이 상류 차량 속도에 미친 영향을 평가하기 위해 자유 흐름 속도 (free-flow speed) 대비 속도 감소량을 로 정의하였으며, 차로 변경 이후 각 차량의 자유 흐름 속도와 최저 속도의 차이로 계산되었다. SV를 기준으로 상류부에 위치한 5대 차량에 대해 를 계산하고 평균을 산출하여 전반적인 영향을 나타내는 를 구했으며, 해당 값이 클수록 교통 흐름 교란이 크다는 것을 의미한다.
Table 4.
Impact on upstream vehicles based on each approach
안전성 평가를 위해서는 기존 TTC(Time-to-Collision)의 2차원에서의 한계점을 보완한 수정된 TTC(modified TTC, mTTC)를 적용하였다 (Ozbay, 2008). 는 목표 차로의 선행 차량에 대해 계산된 mTTC가 5초 미만으로 유지된 총 시간을 의미하며, 이는 차로 변경 과정에서 충돌 위험이 높아진 구간을 포착한다. 쾌적성 측면에서는 저크(jerk) 지표를 활용하여 가속도의 변화율을 평가하였으며, 값이 클수록 급격한 감가속을 의미하며, 운전자의 주행 쾌적성이 떨어짐을 의미한다. 마지막으로, 차로 변경 소요 시간(LC duration)은 SV가 차로 변경을 완료하는 데 소요된 시간을 측정하였다.
실험 결과, 제안된 접근법은 SV의 차로 변경 과정에서 최소 종방향 가속도 측면에서 유의미한 개선을 보였다. 평균 최소 종방향 가속도는 제안 모델이 -1.492m/s2를 기록한 반면, 대조 모델은 –3.269m/s2를 보였다. 이는 제안된 접근법이 더 부드럽고 덜 급작스러운 의사결정을 제공함을 의미한다. 또한, 제안 모델은 대조 모델에 비해 값이 더 낮게 나타났는데, 이는 목표 차로 내 상류부에 미치는 영향이 감소했음을 보여준다. 결과적으로 후행 차량에 대한 영향을 완화하여 전체 교통 흐름과 안정성을 향상시켰다.
안전성 지표인 의 경우, 제안 모델은 평균 1.43초로 대조 모델의 2.08초보다 더 짧은 값을 보였다. 이는 제안 모델이 차로 변경 과정에서 충돌 위험 구간이 더 짧게 발생했음을 의미하며, 안전성 측면에서의 개선을 보여준다. 저크 또한 제안 모델이 평균적으로 0.0162m/s3를 보였으며, 대조 모델의 평균치인 0.0236m/s3보다 더 낮게 나타났다. 이는 제안 모델이 가속도의 변화율을 완화시켜 차량의 움직임을 보다 부드럽게 만들었음을 의미한다. 따라서 운전자의 쾌적성 측면에서도 제안 모델이 우수한 성능을 보였다.
마지막으로 차로 변경 소요 시간은 제안 모델에서 평균 9.088초로, 대조 모델의 5.585초보다 더 길게 나타났다. 이는 제안 모델이 주변 상황에 따라 차로 변경을 지연하거나 속도를 조절함으로써 안전성을 우선적으로 확보했기 때문이다. 결과적으로 차로 변경 소요 시간은 다소 늘어났지만, 이는 위험 회피 및 적응적 의사결정에 따른 자연스러운 결과로 해석할 수 있다. 요약하면, 제안 접근법은 차로 변경 과정에서의 차량 동역학적 측면과 교통류 상호작용 측면 모두에서 우수한 성능을 보였다.
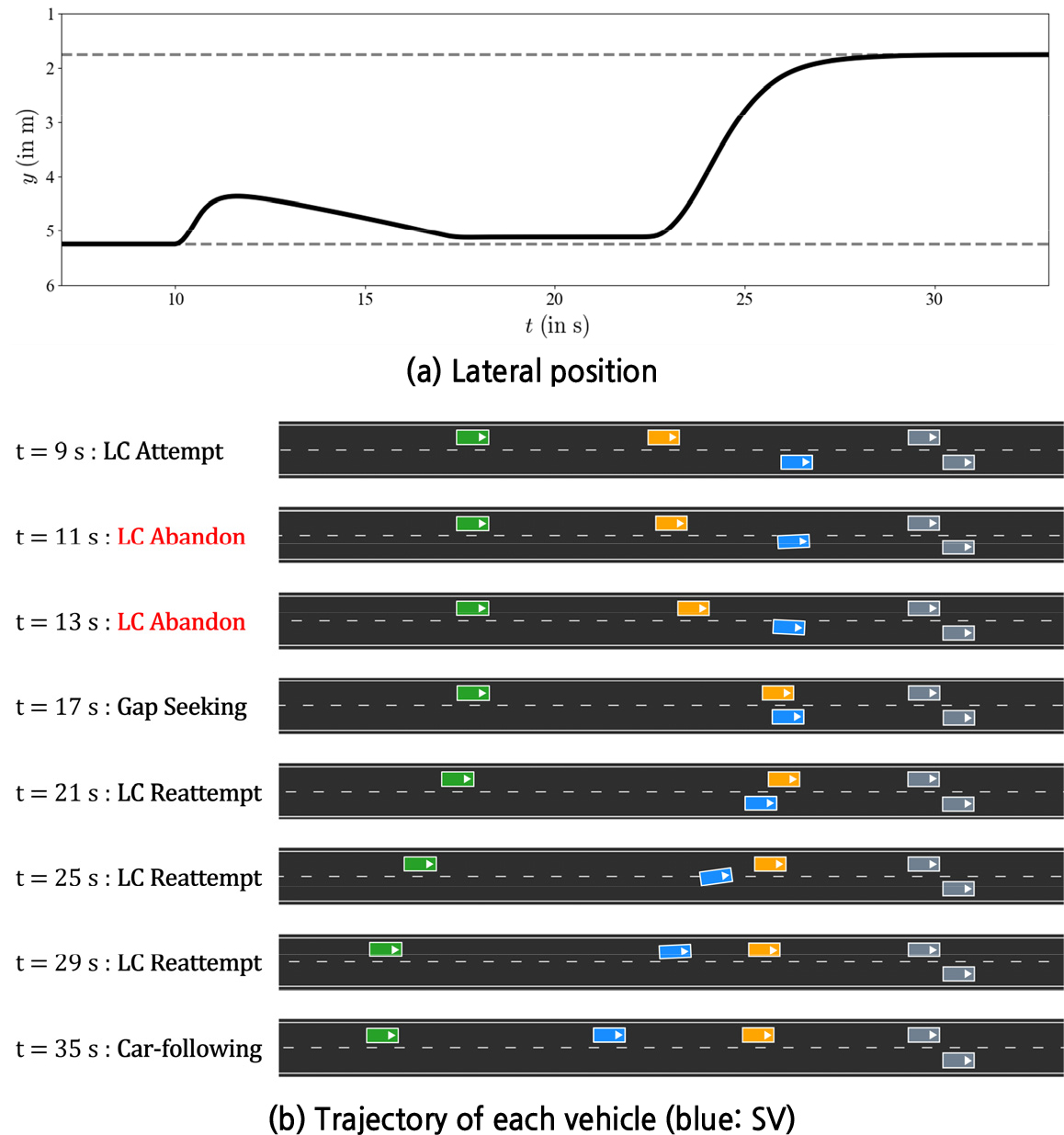
제안된 접근법은 차로 변경 포기 행태도 또한 재현할 수 있었다. 일부 사례에서 SV는 차로 변경 의도를 보였으나, 목표 차로 내 차량 사이의 간격이 충분하지 않은 불리한 조건으로 인해 기동을 포기하였다. Figure 7은 이러한 차로 변경 포기 사례의 시뮬레이션 결과를 보여준다. SV(파란색)는 초기에 차로 변경을 시도했으나, FT(주황색)가 갑작스럽게 가속하여 수용 가능한 간격이 줄어들면서 차로 변경을 중단하고 기존 차로로 되돌아갔다. 이후 더 안전한 기회가 생기자, SV는 새로운 LT(주황색)와 FT(녹색) 사이의 간격으로 다시 차로 변경을 시도하여 성공적으로 합류하였다. 이러한 적응적 반응은 안전성이 보장되지 않을 때 횡방향 움직임을 억제하도록 계수 𝐾가 동적으로 조정되면서 자연스럽게 나타났다.
결론
본 연구는 교통 시뮬레이션 구현을 위한 2차원 주행 행태 모델을 제안하였다. 제안된 모델은 주변 여러 차량의 공간적 근접성과 안전성을 동적으로 가중치화하였고, 이를 통해 교통 안정성과 안전성을 동시에 반영하는 인간과 유사한 주행 행태를 재현하였다.
본 모델은 ARM을 활용하여 주변 차량과의 감가속 관계성을 수치화한 관계 변수를 기반으로 차량의 종방향 및 횡방향 이동을 위한 모수와 종횡방향 가속도를 산출한다. 종방향 가속도는 여러 주변 차량의 관계 변수에 기반하여 가중치를 부여하는 방식으로 계산되며, 이를 통해 주행 차량은 단일 선행 차량에만 의존하지 않고 더 넓은 교통 상황에 대응할 수 있다. 횡방향 가속도의 경우, 목표 차로 내 차량들과의 관계 변수에 따라 SMD 시스템의 계수 를 조정한다. 이를 통해 차로 변경 속도의 조정뿐 아니라, 가용 공간이 부족하거나 안전 위험이 감지될 때 차로 변경을 포기하는 등의 유연한 기동이 가능하다. 두 방향의 가속도는 차량의 주행 의도에 맞게 조정되며, 이를 통해 모델은 상황에 적절한 주행 행태를 재현할 수 있다.
시뮬레이션 결과, 제안 모델은 보다 매끄러운 주행 궤적을 생성하고 상류 교통으로 전파되는 교란을 줄이는 것으로 확인되었다. 또한, 대조 모델의 접근법과 비교했을 때 안전성, 승차감, 다양한 교통 상황에 대한 대응 유연성 등 여러 측면에서 향상된 성능을 보였다. 더 나아가, 차로 변경 포기와 같은 적응적 반응을 재현함으로써 제안 모델은 실제 교통 상황에서 보다 현실적이고 효율적인 자율주행의 가능성을 보여주었다.
다만, 본 연구에서는 기존 모델들과의 직접적인 성능 비교가 이루어지지 않았다. 제안 모델을 면밀히 평가하기 위해서는 기존 차로 변경 모델뿐 아니라 2차원 차량 추종 모델과의 종합적인 비교 분석이 필요하다. 또한, 용량 감소와 같은 거시적 성능 지표를 활용하면 교통 효율성과 안전성을 보다 정량적으로 검증할 수 있을 것이다. 아울러, 제안 모델은 행태 전환을 매끄럽게 구현하였음에도 일부 구간에서 미세한 가속도 급등이 나타났으며, 이는 향후 모델 수식의 정교화와 모수 보정을 통해 개선이 필요하다.
향후 연구에서는 시뮬레이션 결과를 실제 교통 데이터를 바탕으로 비교·검증함으로써 제안 모델의 현실 적용 가능성을 평가하고자 한다. 이를 통해 다양한 교통 환경에서 모델의 안정성과 인간 운전자와 유사한 주행 행태를 모사할 수 있는지를 실증적으로 확인하고, 더 나아가 실제 데이터 기반의 모수 보정 및 개선 방안을 도출할 예정이다.
