

서론
선행 연구문헌 고찰
1. 자율주행차 도입에 따른 영향 분석
2. 자율협력주행 관련 연구
3. 자율주행 전용차로 관련 연구
4. 본 연구의 차별성
자율주행 전용차로 도입 시나리오
1. 자율주행차 Parameter 설정
2. 자율주행 전용차로 도입 시나리오
3. 시뮬레이션 분석방법
시뮬레이션 분석 결과
1. 합류부 ‧ 분류부 시뮬레이션 분석결과
2. 본선부 시뮬레이션 분석결과
결론 및 향후 연구과제
서론
최근 국내에서 지속 가능한 발전을 위한 다양한 정책이 추진됨에 따라 자율주행차 도입 및 실증에 대한 관심이 증가하고 있다. 자율주행차 활성화를 위한 법규 검토 및 국가 연구과제 등이 진행되고 있으며, 2020년 11월 국토교통부는 자율주행 활성화를 위해 임시운행허가 규정을 개정하여 레벨3 자율주행차의 양산을 지원하였다(Ministry of Land, Infrastructure and Transport, 2021a). 2021년 4월에는 경기도 판교제로시티를 자율주행차 시범운행지구로 선정하여 자율주행차의 연구 ‧ 시범 운행을 촉진하였으며(Ministry of Land, Infrastructure and Transport, 2021b), 2021년 9월에는 영동선 ‧ 중부내륙선 80km 구간에서 자율주행기술을 활용해 화물차 4대가 나란히 달리는 ‘자율협력 군집주행’을 선보였다(Ministry of Land, Infrastructure and Transport, 2021c).
자율협력주행은 V2X(Vehicle to Everything) 기반의 자율주행차 군집주행 기술로 혼합교통류 상황에서 안정성과 이동성 측면에서 긍정적인 영향을 미칠 것으로 기대된다. V2X란 유 ‧ 무선망을 바탕으로 인프라가 구축된 사물과 차량이 정보를 교환하거나, 교환하는 기술 자체를 의미하며, 차량과 차량 간 V2V(Vehicle to Vehicle)통신, 차량과 인프라 간 V2I(Vehicle to Infrastructure), 차량과 보행자 간 V2P(Vehicle to Pedestrian) 등의 명칭을 총칭한다(Korea Road Traffic Authority, 2016). 이를 통해 기존 차량에 부착된 센서의 한계였던 시야의 제약조건에 구애받지 않게 되어 교차로나 기상 악화와 같은 상황에서도 시야 확보가 가능하게 되었다(Korea Road Traffic Authority, 2016). 혼합교통류란 자율주행차와 비자율주행차가 혼재된 상황을 의미하며, 향후 장기화될 것으로 예상된다(Alonso Raposo et al., 2017). 따라서 자율주행차 초기 상용화 단계에는 자율차와 비자율차의 마찰을 최소화하도록 전용차로를 설계하고 운영하는 방안을 검토해야 할 것이다(Jeong et al., 2020). 또한, 「자율주행자동차 상용화 촉진 및 지원에 관한 법률」 제6조(자율주행 안전구간의 지정)에서는 자동차전용도로 중 안전하게 자율주행 할 수 있는 구간(“자율주행 안전구간”)을 지정하도록 제시하고 있으며(Korean Law Information Center, 2021), 자율주행차의 안전, 운행 지원을 위한 인프라 마련 및 확대에 관해 언급하고 있다(Korea Research Institute for Human Settlements, 2019).
자율주행과 자율협력주행 기술의 상용화가 실현되어가며, 새로운 도로 생태계 구축을 위한 자율주행 전용차로 또는 전용도로 도입 검토에 대한 필요성도 증가되고 있다. 이에 본 연구에서는 기존 연구문헌 고찰을 통해 자율주행 전용차로 도입 시 혼합교통류 특성 분석을 통한 자율주행 전용차로 도입 시나리오를 구상하였으며, 관련 시나리오를 분석하였다.
선행 연구문헌 고찰
1. 자율주행차 도입에 따른 영향 분석
The r-evolution of driving: from Connected Vehicles to C-ART(EC JRC Report)에서는, 자율주행차의 도입에 따른 영향을 단기(2020-2030)와 중기(2030-2050)로 나누어 분석하였다. 단기적으로는 자율주행차의 높은 출고가격으로 인해 도로에서의 자율주행차 혼입율이 높지 않을 가능성이 있으며, 대량생산에 따른 가격 하락에도 불구하고 자율주행차의 높은 유지보수 비용과 낮은 신뢰도는 자율주행차 혼입율에 큰 영향을 미칠 것으로 예상하고 있다. 중기적으로는 자율주행차와 비자율주행차가 혼재하는 혼합교통류가 오래 지속될 것이며, 혼합교통류 상황에서는 일반 차량과의 의사소통 문제, 해킹, 시스템 고장, 자율주행차의 과도한 대응 등의 문제가 발생할 것으로 전망하였다.
다른 한편으로는 자율주행차의 혼입률이 증가할수록 교통흐름이 안정화되며, 교통혼잡으로 인한 손실이 감소하고, 사고비용 절감 편익의 증가로 인한 교통사고 사망자수가 감소할 것이라 예상하기도 한다(Jung, 2017). 자율주행차와 일반차량이 혼재된 혼합교통류 상황은 장기간 지속될 전망으로, 혼합교통류의 특성에 따른 적합한 도로 생태계 구축이 필요할 것이다. 또한 혼입율에 따라 그 특성이 빠르게 변화할 것이므로 이를 개선 및 보완하기 위한 자율협력주행 연구의 필요성이 증가하고 있다.
2. 자율협력주행 관련 연구
자율협력주행은 V2X 기술과 자율주행 기술을 적용하여 도로 주행 시 교통안전과 효율성 측면에서 유의미한 성능을 보이고 있다(Xiao et al., 2018; Calvert et al., 2019; Wang et al., 2019; Park et al., 2020). 교통안전 측면에서 Park et al.(2020)은 자율협력주행의 교통안전 측면을 탐색하였으며, V2V 기술만으로는 전방 돌발상황에 대한 신속한 대응이 어렵다고 판단하여 V2I 기반의 Level3 군집주행 안전서비스를 정의하고 관련 시나리오를 제시하였다. Lee(2020)는 이동성과 안전성을 모두 고려한 혼합교통류 교통관리를 위하여 자율협력주행기술을 활용한 교통운영관리 전략을 설계하고 평가하였다. 이 연구에서는 자율주행강도(ADA) 적용 및 VISSIM을 이용하여 군집형성 알고리즘 및 혼합교통류 차량군집 관리전략을 개발하였고, 고속도로 유입연결로 구간에서 화물차 군집 운영전략을 수립할 수 있는 방안을 제시하였다. 이를 통해, 차로별 허용 적정 군집크기와 군집간 간격을 산출할 수 있었다.
효율성 측면에서 Calvert et al.(2019)는 네덜란드 고속도로에서 교통시뮬레이션을 이용하여 화물차 군집주행을 사용했을 때 전체 용량, 램프에서의 용량, 화물차의 군집주행 유지 능력 등을 평가하였다. 연구 결과, 포화교통류 상태에서는 화물차 군집주행이 부정적인 효과를 보이고 있다고 하였다. Wang et al.(2019)은 높은 보급률에서 화물차 군집주행이 도로용량을 증대시키나 지속적으로 고속도로 분류부에서 상충문제가 일어났으며 군집양보 등의 방법을 적용한 해결방안을 제시하였다. Xiao et al.(2018)은 다양한 자율협력주행 시장점유율(MPR)에 대한 시뮬레이션을 실시하였고, 그 결과 실제로 MPR이 증가할 경우 도로 용량이 증가됨을 확인하였다. 그러나 엇갈림구간의 경우 모든 MPR에서 기존 용량보다 떨어지며 자율협력주행 시 다른 교통류와 이질성이 나타남을 확인하였다.
3. 자율주행 전용차로 관련 연구
자율주행 전용차로란 버스전용차로와 같이 특정 차량만 이용할 수 있는 차로를 의미하나, 그 특성은 버스전용차로와 상반 될 것으로 예상된다. 버스전용차로는 교통혼잡, 정체 등 포화교통류 상황에서 수송 인원이 많은 버스와 다인승 차량에게 혜택을 주는 반면, 자율주행 전용차로는 자율주행차와 더불어 전체 차로에 이동성과 안전성 향상을 기여할 것으로 예상된다.
Kim(2020)은 한 개 차로를 완전히 자율주행화물차만으로 운영할 경우 전용차로를 도입하지 않을 경우보다 평균속도 및 처리량 증가, 비자율차 상충률 감소 등 긍정적인 결과를 얻을 수 있었다. 그러나 접속부의 용량이 부족할 경우 평균속도가 크게 감소하므로, 전용차로를 도입하기 전에 고속도로 접속부 및 연결도로의 용량이나 속도 등에 기반하여 구간별 운영전략 수립이 필요함을 확인하였다.
Kim et al.(2021)는 편도 4차로 고속도로 구간에서 버스전용차로와 자율주행전용차로를 고려한 3가지 전용차로 설치방안을 제시하고 각각 시나리오별 버스 MPR별 효율성 및 안전성에 따른 최적 전용차로 설치방안을 제시하였다. 연구 결과, 자율주행 전용차로 도입이 효율성 및 안전성 측면에서 더 효과적이었으며 MPR이 증가에 따라 효율성 및 안전성이 일정한 패턴으로 도출되었다.
Kim(2021)은 혼입률과 기본구간 교통량, 합류부 교통량, 분류부 진출차량 비율, 차로 수 등으로 구분된 총 6가지의 전용차로 기준설정 시나리오를 구성하였고, 이를 안전성과 효율성 결합모형(CM)에 적용하여 혼입률과 교통량에 따른 적정 전용차로 수와 전용차로 설치기준 교통량을 제시하였다. 그 결과, 혼입률이 증가하면 설치기준 교통량은 감소하고, 전용차로 수가 증가하면 설치기준 교통량도 증가하는 경향을 보였다. 이에, LOS D에서는 1차로 혹은 2차로의 전용차로 설치가 필요하며, LOS E에서는 전용차로 3차로의 설치가 필요한 것으로 분석되었다.
Ye and Yamamoto(2018)는 밀도를 주요 변수로 하는 3차선 저밀도 이질적 교통류 모형을 이용하여 자율협력주행 전용차로가 교통량에 미치는 영향의 장단점을 밝히고자 하였다. 시뮬레이션 결과 자율협력주행차의 기능이 높을수록 자율협력주행 전용차로의 성능도 증가하였고, 상대적으로 낮은 자율협력주행차의 MPR은 전체 교통량에 부정적인 영향을 미치는 것으로 나타났다. 또한 자율협력주행 전용차로의 제한속도를 다른 차로에 비해 높게 설정한 경우에는 전체적인 속도의 증가가 이루어졌으나, 고밀도에서는 차로 변경이 거의 불가능하여 전용차로 설치의 의미가 퇴색되는 것을 확인할 수 있었다.
4. 본 연구의 차별성
지금까지 자율주행차 도입에 따른 영향 및 자율협력주행, 자율주행 전용차로에 대한 연구는 주로 혼합교통류 특성 분석 및 용량 변화, 군집주행 등을 주제로 하였다. 기존 연구에서는 자율주행 전용차로 도입 효과를 분석 시 본선, 분류 또는 합류 중 하나의 구간만을 대상으로 하였다. 그러나 해당 구간들은 상관관계를 가지고 있으므로, 본 연구에서는 합류부에서 본선, 분류부로 이어지는 연속류 도로 내에서 자율주행 전용차로를 도입하는 시나리오를 개발 및 분석한 것에 큰 차별성이 있다고 판단된다. 또한, 자율주행차의 차종을 ‘자율주행 승용차’와 ‘자율주행 화물차’ 두 가지로 구별하여 자율주행 전용차로 내의 자율주행차량간 영향을 확인하였다.
자율주행 전용차로 도입 시나리오
본 연구에서는 자율주행 전용차로 도입에 따른 일반차량과 자율주행차가 혼재된 혼합교통류 상황의 특성을 분석하고자 한다. 본 연구에서 정의하는 ‘자율주행 전용차로’란 V2X 기반의 자율협력주행이 가능한 차량만 통행이 가능한 차로를 의미하고 있으며, 자율주행 전용차로 도입 조건은 ‘1차로’, ‘3차로’, ‘전용차로 없음’으로 구분하여 상호 비교 ‧ 분석하였다. 자율주행 전용차로가 ‘1차로’ 또는 ‘3차로’인 경우 자율주행차는 전용차로에서만 군집주행이 가능하며, 자율주행 승용차는 전용차로 이외 차로도 통행이 가능하도록 설정하였고, 자율주행 화물차는 전용차로만 통행하는 원칙으로 설정하였다. 또한, ‘전용차로 없음’에서는 군집주행을 구현하지 않는 것으로 구상하였다.
1. 자율주행차 Parameter 설정
자율주행차 Parameter 설정을 위해 가상의 도로를 구축하여 차종, 차종비, 운전행태에 따른 차량추종모델을 설정하였다. 차종은 승용, 화물, 버스, 자율주행 승용차, 자율주행 화물차, 총 5종으로 분류하였고, 차종비는 한국도로공사의 고속도로 이용차량현황(E-Country indicators, 2021)을 참고하여 MPR 0%를 기준으로 소형차(1종) 87%, 중형차(2종) 3%, 화물차(3, 4, 5종) 10%를 사용하였다. MPR에 따른 차종비는 Table 1과 같다.
Table 1.
The ratio of vehicle types according to the MPR
|
Ratio of vehicle types (%) | MPR (%) | |||||
| 0 | 10 | 20 | 30 | 40 | 50 | |
| Car | 87 | 78.3 | 69.6 | 60.9 | 52.2 | 43.5 |
| Bus | 3 | 3 | 3 | 3 | 3 | 3 |
| HGV | 10 | 9 | 8 | 7 | 6 | 5 |
| AV car | - | 8.7 | 17.4 | 26.1 | 34.8 | 43.5 |
| AV HGV | - | 1 | 2 | 3 | 4 | 5 |
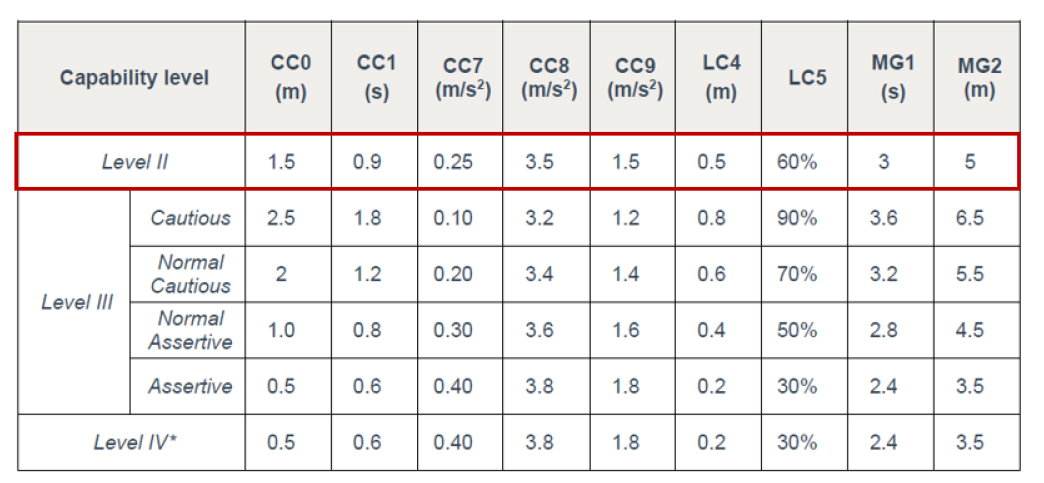
운전행태에 따라 일반차량(Freeway), 자율주행 승용차(AV car), 자율주행 화물차(AV HGV)로 분류하였으며, ATKINS(2016)에서 제시한 차량추종모델은 Figure 1과 같다. 자율주행 승용차와 자율주행 화물차의 차량추종모델은 Level 2 수준의 Parameter를 사용하였으며, 운전자의 주행행태가 반영되는 CC값은 0으로 설정하였다. 또한 군집 크기는 승용 3대, 화물 2대를 적용하였으며, 군집내간격은 각각 0.6s, 군집주행 시 속도는 승용 100km/h, 화물 80km/h로 설정하였다.
2. 자율주행 전용차로 도입 시나리오
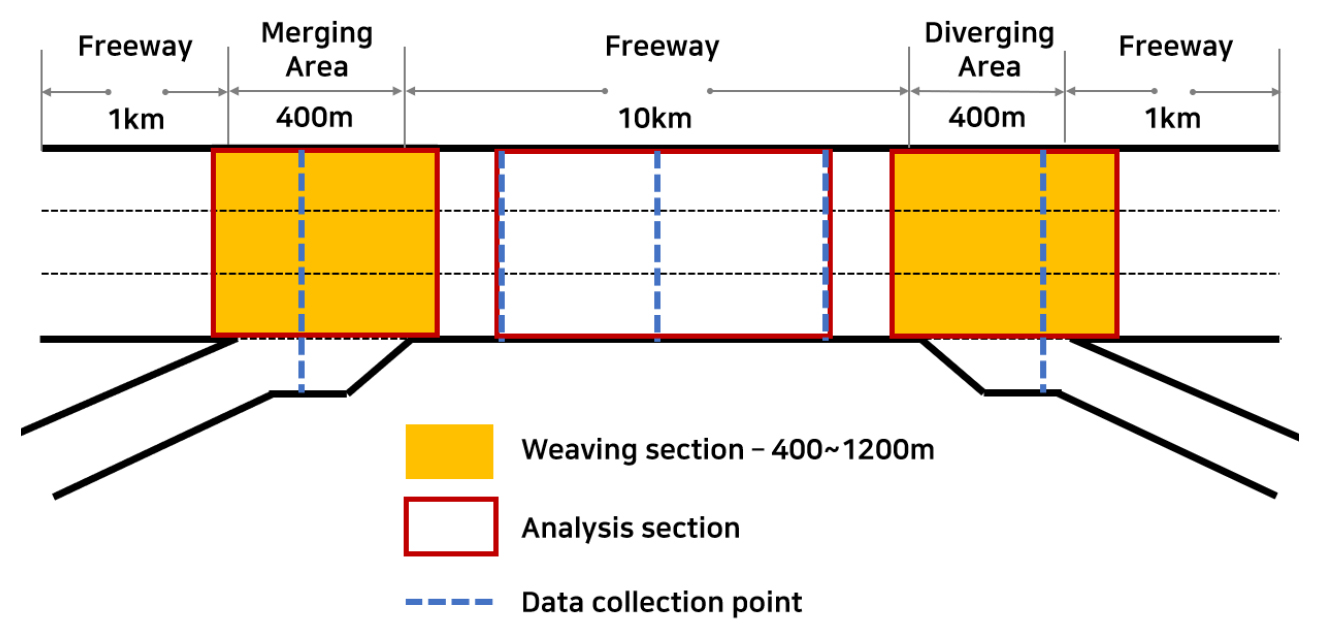
자율주행 전용차로 도입 시나리오 구성을 위해, 본 연구에서는 미시적 교통시뮬레이션 프로그램인 VISSIM을 활용하여 가상의 도로환경을 구축하였다. 편도3차로 도로에 본선과 합류부, 분류부를 포함하여 12.8km의 직선도로를 설계하였으며, 그에 따른 영향권의 범위도 설정하였다. 도로용량편람(Ministry of Land, Infrastructure and Transport, 2013)에서는 합류부와 분류부의 진입 영향권 범위를 400m로 규정하고 있지만, 전용차로가 도입됨에 따라 해당 영향권 내에 교통류가 안정되기 어렵다고 판단하여 도로용량편람(Ministry of Land, Infrastructure and Transport, 2013)과 선행연구(Jeong et al., 2020)를 준용하여 Table 2와 같이 영향권 범위를 재설정하였다. 영향권 범위 내에서는 자율주행 전용차로에 일반차량의 출입을 허용하였다.
Table 2.
Recalculation of the weaving section according to the location of the exclusive lane
| Weaving section | |||||
|
The location of the exclusive lane | LOS A | LOS B | LOS C | LOS D | LOS E |
| First lane | 600m | 1,000m | 1,200m | ||
| Third lane | 400m | 600m | |||
| No exclusive lane | 400m | ||||
자율주행 전용차로 도입 시나리오는 자율주행 전용차로의 위치를 기준으로 서비스 수준별 교통량과 MPR에 따라 합류부, 본선, 분류부의 이동성을 비교 ‧ 분석하고자 하였다. 서비스 수준별 교통량은 도로용량편람(Ministry of Land, Infrastructure and Transport, 2013)을 참고하여 Equation 1을 통해 Table 3과 같이 수정교통량을 산출하였다.
where, : Traffic volume
: Peak hour factor
: Number of lanes
: Width factor
: Heavy vehicle factor
Table 3.
Modifided traffic volume according to the level of service
3. 시뮬레이션 분석방법
시뮬레이션 분석을 위해 자율주행 전용차로 도입 시나리오를 설정하여 전용차로 도입조건에 따라 이동성을 분석하였다. warm-up time 900초를 포함하여 총 4,500초로 설정하여 분석하였고, 평균값에 수렴하도록 Random seed를 다르게 적용하여 각 시나리오별로 분석을 5회씩 실시하였다. 분석구간은 Figure 2와 같으며, 지점마다 ‘차로별 교통량’, ‘차로별 속도’, ‘평균 교통량’, ‘공간평균속도’를 산출하였다. 합류부와 분류부의 분석구간은 영향권 범위로 설정하였으며, 각각 1개 지점에서 데이터를 수집하였다. 본선의 분석구간은 전체 10km 구간 중 5km를 설정하였고, 3개 지점에서 수집한 데이터의 평균값을 사용하였다.
공간평균속도는 차로별 교통량에 따라 가중치를 주는 방법으로 Equation 2와 같다.
where, : Space mean speed(km/h)
: No. of vehicles observed at station (veh)
: No. of stations within segment
: Spot mean speed observed at station (km/h)
시뮬레이션 분석 결과
1. 합류부 ‧ 분류부 시뮬레이션 분석결과
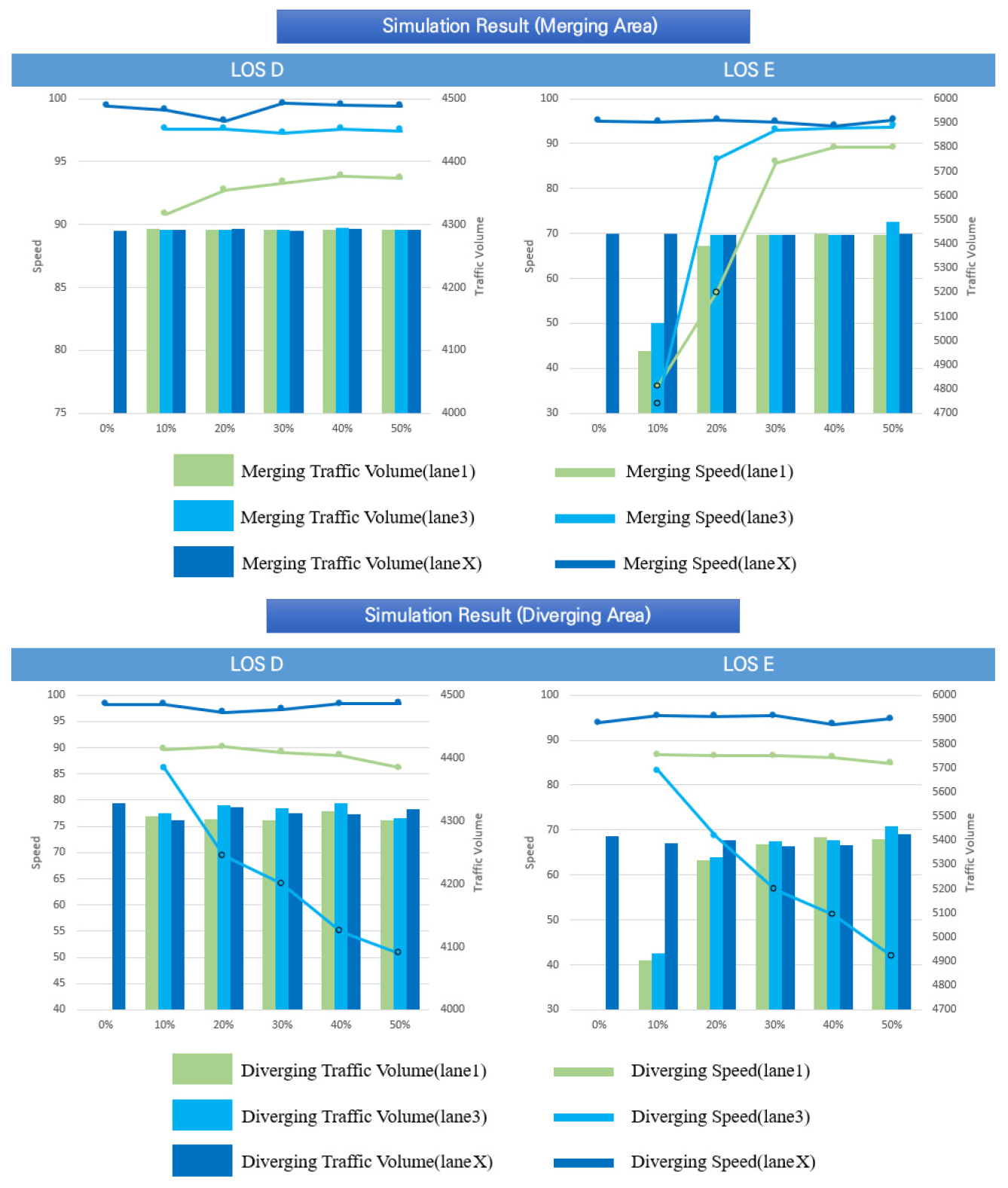
Figure 3은 자율주행 전용차로 도입 시나리오 분석결과 중 LOS D-E, MPR 0-50% 합류부와 분류부의 교통량과 공간평균속도이다. 먼저 합류부에서는 전용차로 도입 시 LOS E, MPR 10-20% 구간에서 전용차로 이외 차로에 교통량 집중현상이 발생하여 합류부 교통량이 약 10% 감소하였으며, 본선과 분류부의 교통량 감소로 이어졌다. 또한, 해당 구간에서 전용차로 ‘1차로’ 도입 시 교통량 집중현상으로 합류차로 지체가 발생하였다. 전용차로 3차로 도입 시 LOS E, MPR 30-50% 구간에서 군집주행 차량으로 인해 합류차량의 진입 실패와 합류차로 지체가 발생하였으며, 분류부에서도 일반차량이 군집주행 차량에 의해 영향권 범위 내에서 차로변경에 실패하여 2차로에 지체를 유발하였다. 합류부와 분류부에서는 자율주행 전용차로 도입 시 교통량과 MPR이 증가할수록 속도 저하, 교통량 감소, 지체 등의 문제가 발생하였다. 따라서 합류부와 분류부는 전용차로 도입에 따른 도로용량 감소와 군집주행 차량들에 의한 차로변경 실패 등 교통류에 부정적인 요인으로 작용하는 구간임을 확인하였다.
2. 본선부 시뮬레이션 분석결과
Figure 4는 본선부 교통량과 공간평균속도이다. 교통량은 LOS A-D까지 MPR에 따라 큰 차이는 없었으나, LOS E, MPR 10-20% 구간에서 전용차로 외 차로에 교통량이 집중되는 현상이 발생하였으며, 합류부 교통량 감소로 본선 교통량이 감소하였다. 속도 측면에서 ‘3차로’에 전용차로를 도입하였을 때 ‘1차로’ 도입보다 대부분의 구간에서 높은 공간평균속도와 균등한 차로별 평균속도를 보였다. 하지만 전체 구간에서 군집주행을 하지 않는 ‘전용차로 없음’이 이동성 측면에서 가장 좋은 결과를 나타냈다. 이는 전용차로에서 군집주행 시 속도제한이 있는 자율주행 화물차에 의해 자율주행 승용차의 속도도 영향을 받게 되어 전용차로의 평균속도 감소를 유발한 것으로 판단된다.

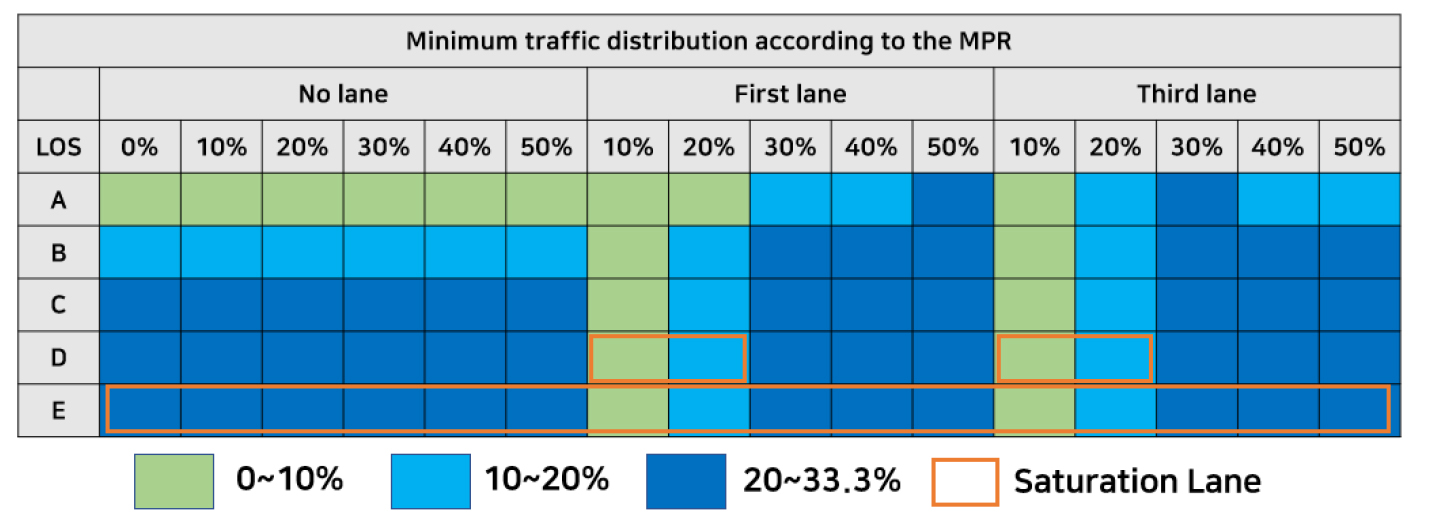
MPR에 따른 최소 교통량 분담율을 Figure 5에 제시하였다. 본 연구에서 제시한 ‘최소 교통량 분담율’이란 전체 교통량 대비 차로별 교통량 중 최소값을 산출하였다. MPR이 0%일 때 LOS A-D까지는 도로교통법시행규칙 제16조(차로에 따른 통행구분)에 따라 추월차로인 1차로의 교통량 분담율이 가장 적게 나타났으며, LOS E에서는 포화교통류 상황에서 화물차를 앞지르기 위해 1, 2차로에 교통량이 집중된 것으로 판단된다. 자율주행 전용차로 도입 시 LOS D-E, MPR 10%, 20%인 경우 낮은 교통량 분담율로 인해 전용차로 이외 차로에 교통량이 과집중 되는 현상이 발생하여, 해당 차로가 과포화되는 현상이 발생하였다. 따라서 본선부에서 자율주행 전용차로 도입은 LOS D-E, MPR 10-20% 구간에서 교통류에 악영향을 미치며, 해당 구간을 제외하면, 자율협력주행을 위한 전용차로는 ‘1차로’ 도입보다 ‘3차로’ 도입이 이동성 측면에서 좋은 결과를 도출하는 것임을 확인할 수 있었다.
결론 및 향후 연구과제
본 연구에서는 VISSIM을 활용하여 자율주행 전용차로 도입에 따른 혼합교통류 특성 분석을 위한 시나리오를 개발하였고, 일반차량과 자율주행차가 혼재된 혼합교통류 상황에서 전용차로가 ‘1차로’, ‘3차로’, ‘전용차로 없음’으로 구분하여 이동성에 대해 분석하였다. 그 결과, 합류부와 분류부에서 자율주행 전용차로 도입 시 LOS와 MPR이 증가할수록 교통류를 악화시켜 지체가 발생하며, 교통량이 감소하는 결과를 초래하였다. 또한, 합류의 영향으로 본선에서도 일부 교통량이 감소하였으며, LOS D-E, MPR 10-20% 구간에서는 전용차로 도입 시 전용차로 이외 차로가 과포화되는 현상이 발생하였다. 따라서 군집주행을 하지 않는 ‘전용차로 없음’이 이동성 측면에서 가장 뛰어났으며, 전용차로 도입에 따른 악영향은 LOS D-E, MPR 10-20% 구간에서 가장 두드러지게 나타났다. 그러나 자율협력주행을 위한 자율주행 전용차로 도입 시 해당 구간을 제외하면, ‘3차로’ 도입이 ‘1차로’ 도입보다 이동성 측면에서 좋은 결과를 도출하는 것으로 나타났다.
자율주행차의 정확한 제원 파악에는 한계가 존재하기에 본 연구에서는 기존 선행 연구 및 도로용량편람 등에서 제시하는 기본값을 사용하여 기초연구를 수행하였다. 따라서 향후 연구에서는 현재 개발이 추진되고 있는 자율주행차의 제원 및 기술들을 고려하여 본 연구에서 적용한 제반 변인 값들을 재정립해야 할 것이다. 또한, 본 연구에서 제시한 시나리오를 바탕으로 자율주행 전용차로 도입에 따른 혼합교통류 특성 분석을 위해 추가적인 연구가 필요할 것이다. 첫째, 군집주행 차량들에 의해 발생하는 합류와 분류의 지체를 해결하기 위해 합류부와 분류부의 혼합교통류 운영관리전략이 필요하다. 둘째, VISSIM에 기본적으로 탑재되어 있는 내부 Parameter만으로는 합류부, 분류부에서 불필요한 차로변경이나 비정상적인 주행행태를 제어하는데 한계점이 존재하므로 VISSIM COM-interface를 통한 차량제어가 필요하다. 셋째, 자율주행차의 개별차량 궤적, 시간 차두간격, 거리 차두간격의 특성과 자율주행차의 교통량, 밀도 속도의 관계 특성을 구체화하기 위한 미시적, 거시적 혼합교통류 측면에서의 연구가 필요하다.
본 연구는 자율협력주행 기반의 전용차로 도입 시 고려해야 하는 다양한 시나리오를 개발하는데 의의가 있으며, 본 연구의 결과를 향후 자율주행 전용차로에 관한 연구 수행 시 기초자료로 활용할 수 있을 것으로 판단된다.
