

서론
분석 데이터
분석 방법론
1. 드론 데이터를 활용한 상충 지표 계산
2. 사고빈도 모형 기반의 주요 상충 지표 도출
3. 신호 교차로 micro-hotspot 식별
분석 결과
결론 및 향후 연구
서론
도심부 신호 교차로는 보행자 등 취약 도로 이용자가 혼재되어 있으며, 이들이 안전을 보장받을 수 있도록 특히 안전에 주의를 기울여야 하는 구간이다. 이에 따라 적절한 신호 교차로 횡단보도 위치에 관한 연구, 보행섬 및 도류화 시설의 설치에 관한 연구 등 교통안전 전략에 관한 다양한 연구들이 수행됐다(Wang et al., 2022; Hurwitz et al., 2023; Wu et al., 2024). 하지만 효과적이고 실용적인 교통안전 관리전략을 위하여 사고 위험이 자주 발생할 가능성이 높은 구간을 사전에 찾을 필요가 있으며, 해당 구간의 사고 위험 발생 요인과 도로, 교통, 환경 특성을 고려하여 사고 위험을 완화하기 위한 안전조치를 수립할 필요가 있다. 그리고 이를 위한 방법의 하나로, 안전조치가 시급한 micro-hotspot을 찾아 해당 구역에 맞는 안전 관리전략을 수립하는 것이 있다.
기존 사고 위험 구간 식별 연구에서는 주로 사고 이력 자료를 활용하였으며, 이를 위해 사고 빈도 예측 모형을 개발하였다. 이들 연구는 장기간에 걸쳐 수집된 누적 사고 데이터를 기반으로 교차로 단위 등 macro 단위의 hotspot을 식별하였다(Stipancic et al., 2020; Kuşkapan et al., 2022; Li and Wang, 2022; Schultz et al., 2023). Stipancic et al.(2020)은 사고 데이터와 교통량 데이터, 신호 데이터를 사용하여 Full Bayesian Spatial Poisson Log-Normal Model 기반의 신호 교차로 사고 빈도 모형을 개발하고 Macro level의 hotspot을 식별하는 연구를 수행하였다. Kuşkapan et al.(2022)는 신호 교차로에서의 차대 보행자 사고에 관한 신호 교차로 Macro level hotspot 식별 연구를 수행하였다. 분석에 사고자료를 사용하였으며, hotspot 식별에는 Artificial Neural Network(ANN) 방법론을 활용하였다. 이렇듯, 기존 연구들에서는 미시적인 교차로 세부 구간에 집중하기보다는 거시적인(Macro) 단위의 분석을 수행하였으며, 안전 개선이 시급한 교차로 또는 지역을 선정하는 데에 초점을 두었다. 하지만 거시적인 안전 개선뿐만 아니라 미시적인 관점에서 신호 교차로 안전 개선을 위한 실효성 있는 안전조치를 마련하기 위해 교차로 내부 세부 구간에서의 위험을 파악할 필요가 있다. 또한, 해당 구간에서 사고 위험과 차량간 상충을 초래할 수 있는 위험 요소를 발굴할 필요가 있다.
하지만 사고는 매우 희귀한 이벤트로, 과거 사고 기록에만 의존하여 위험 구간을 식별하게 되면 사고가 날 뻔한 상황, 즉 상충 상황을 고려하지 못하는 한계를 가지고 있다. 상충 이벤트는 사고 위험과 연관이 있지만 사고로 이어지지 않을 수 있다. 신호 교차로에서의 세부 사고 위험 구간 식별을 위해서는 사고 발생 이력뿐만 아니라 사고 위험을 나타내는 상충 상황들도 모두 살펴보아야 할 필요가 있다. Table 1에서는 신호 교차로에서 상충 이벤트를 통해 사고 위험을 예측하고자 한 연구를 정리하였다. 기존 연구들에서는 신호 교차로에서 TTC, PET, MTTC 등 다양한 Surrogate safety measurements(SSMs)를 산출하여 사고 발생 직전 이벤트를 예측하는 연구를 수행하였다(Zhang et al., 2020; Ali et al., 2023; Hussain et al., 2023; Singh et al., 2024). 이들 연구에서는 상충 이벤트를 활용하여 신호 교차로에서의 사고 위험을 예측하였으며, 이를 위해 장기간 수집된 고품질의 차량 궤적 데이터와 사고 데이터를 사용하였다. 하지만 기존 연구의 경우 교차로에서 위험 구간 식별보다는 사고 위험을 식별하는 데에 중점을 두었으며, 주로 단일 상충 지표만을 활용하여 분석을 수행하였다. 본 연구에서는 보다 다양한 유형의 상충 상황을 포착할 수 있는 방법론(Joo et al., 2024)을 적용하여 세 가지 상충 지표를 산출하고, 이를 활용해 신호 교차로에서의 세부 위험 구간을 식별하고자 하였다. 이를 위해 높은 정밀도의 차량 궤적 데이터가 필요했으며, 드론 영상 데이터를 활용하여 차량 궤적을 수집 및 추출하였다. 드론 데이터를 통해 도출된 상충 지표를 독립변수로, 사고 이력에서 추출한 누적 사고 빈도를 종속변수로 설정하여 사고 빈도 모형을 구축하였다. 이후, 모형 적합도 지표를 비교 분석하여 사고 위험을 가장 효과적으로 설명할 수 있는 상충 지표와 그 임곗값을 도출하였다. 도출된 지표와 임곗값을 기준으로 신호 교차로의 micro-hotspot을 식별하였으며, 해당 사고 위험 구역과 도로 및 교통환경, 인프라간의 연관성을 분석하여 안전 개선 방안의 예시를 제시하였다.
Table 1.
Previous studies on the crash risk prediction in the signalized intersection using SSMs
| No | Authors | Methodology | Data | Contents |
| 1 | Zhang et al.(2020) |
SSM (TTC, PET), Extreme Value Theory, Gated Recurrent Unit (GRU), ANN | CCTV data | ∙Forecast the crash occurrences among automobiles and pedestrians at signalized intersection |
| 2 | Ali et al.(2023) |
SSM (MTTC), Extreme Value Theory (Block Maxima, Generalized Extreme Value distribution + Bayesian) | Video data (Automated video analysis) |
∙Crash risk prediction in the signalized intersection ∙Crash risk evaluation in each cycle length |
| 3 | Hussain et al.(2023) |
SSM (MTTC), A Bayesian Generalised Extreme Value Theory, Autoregressive integrated moving average method | Video data |
∙Crash risk prediction in the signalized intersection ∙Crash risk evaluation in each cycle length |
| 4 | Singh et al.(2024) |
SSM (PET), Extreme Value Theory (Block Maxima) | Argoverse Autonomous vehicle data, Crash data | ∙Vehicle-pedestrian crash minimization |
Micro-hotspot 식별 연구에서는 macro-hotspot 식별 연구에서 찾을 수 없는 교차로 세부 위험 구간에 관한 새로운 인사이트를 제공한다. Son and Park(2022)는 사고 심각도 데이터와 Geographic Information System(GIS) 데이터를 사용하여 커널 밀도추정 방법론(Kernel density estimation, KDE)을 기반으로 교차로의 micro-hotspot을 식별하는 연구를 수행하였다. 이를 통해 도심부 교차로에서 사고 위험과 밀접한 관련이 있는 도로 인프라적 특성과 사고 특성을 식별할 수 있었다. 이전 연구와 동일하게 본 연구에서는 micro-level의 신호 교차로를 분석 대상 범위로 설정하였으며, 교차로 단위에서의 micro-hotspot을 식별하였다. 또한, 보다 정교한 사고 위험 상황 포착을 위하여 전통적인 hotspot 식별 연구와 다르게 사고 데이터와 교통 상충 데이터를 모두 활용하여 분석을 수행하였다.
본 연구는 교차로 내 미시적 사고 위험 hotspot 식별 방법을 개발함으로써, 사고 이력 기반의 hotspot 식별 연구와 실시간 상충 이벤트를 활용한 사고 위험 식별 연구 간의 간극을 해소하고자 하였다. 또한, 상충 데이터와 차량 간 복잡한 상호작용을 분석하여 교차로 안전에 대한 보다 포괄적이고 심층적인 이해를 제공하는 것을 목표로 하였다.
분석 데이터
본 연구에서는 1초당 30프레임으로 기록된 드론 영상에서 추출된 차량 주행 궤적 데이터인 CitySim 데이터를 활용하였다(Zheng et al., 2024). 이 데이터는 교통안전 연구를 지원하며, 차량 간의 미세한 상호작용을 포착할 수 있어 상충 분석에 유용하다. CitySim 데이터는 궤적의 높은 정확도를 보장하기 위해 영상 안정화(Video Stabilization), 객체 필터링(Object Filtering), 다중 영상 병합(Multi-Video Stitching), 탐지 및 추적(Detection and Tracking), 향상된 오류 필터링(Enhanced Error Filtering)의 다섯 단계를 거쳐 처리되었다. 또한, 차량의 바운딩 박스(Bounding Box) 정보를 함께 추출함으로써 더욱 정밀한 상충 계산이 가능하도록 설계되었다(Zheng et al., 2024).
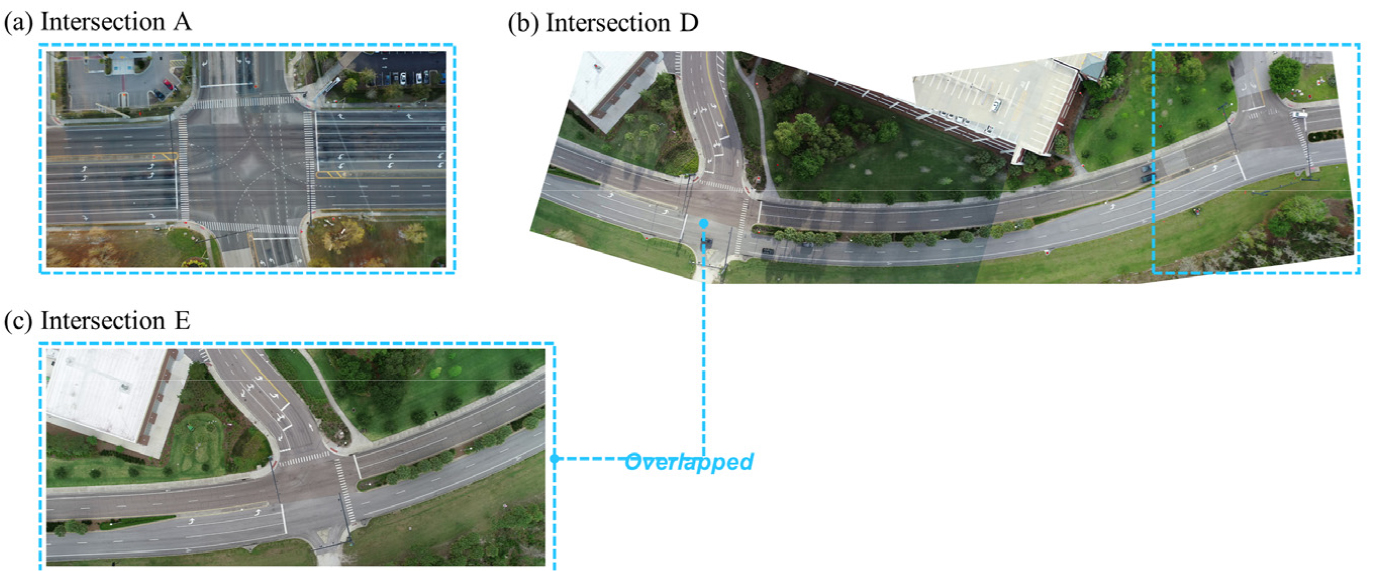
본 연구에서는 신호 교차로의 micro-hotspot 식별을 위해 CitySim에서 제공하는 드론 영상 기반 차량 주행 궤적 데이터 중 세 가지 유형의 신호 교차로 데이터를 활용하였다. Intersection A는 4지 신호 교차로로, 세 교차로 중 가장 규모가 크고 교통량이 많다. Intersection D와 Intersection E는 서로 연결된 3지 신호 교차로로, 대형 주차장으로 진입하기 위해 회전하는 차량이 다수 존재하며, 차도와 물리적으로 분리되지 않은 자전거 전용 차로가 포함되어 있다. 분석 대상 교차로의 위성 사진은 Figure 1에 제시되어 있다.
또한, 본 연구에서는 신호 교차로에서의 사고 위험과 연관성이 높은 상충 지표를 식별하기 위하여 사고 이력 자료를 함께 수집하여 활용하였다. 사고 데이터의 경우 2019~2022년에 발생한 이력 자료로, Signal Four Analytics에서 제공하는 CitySim 데이터셋 대상 지역과 동일한 지역의 사고 데이터를 수집하여 활용하였다(Signal Four Analysis., 2024). 드론 영상데이터의 특성상 낮에, 밝은 시간대에 촬영이 되었으므로 주간 데이터만을 필터링하여 사용하였으며, 어두운 조명과 일몰 시간대의 사고를 사고 데이터셋에서 제외하였다. 본 연구에서는 사고 데이터뿐만 아니라, micro-hotspot 식별 후 세부 위험 구간에서 위험이 발생한 요일을 찾기 위해 open street map 데이터를 기반으로 횡단보도, 정지선, 교통 분리 시설물, 자전거 전용차로, 안전표지 위치 등 도로 및 교통환경 데이터를 구축하였다.
상충 데이터와 사고 데이터, 도로 및 교통 데이터는 모두 그리드 단위로 최종적으로 집계하여 분석에 활용하였다. 그리드는 차로 폭을 고려하여 3.6m by 3.6m 크기의 그리드로 설정하였으며, 그리드 단위로 집계된 상충 지표별 상충 건수, 사고 건수 등의 자료를 기반으로 사고 빈도 모형을 구축하였다.
분석 방법론
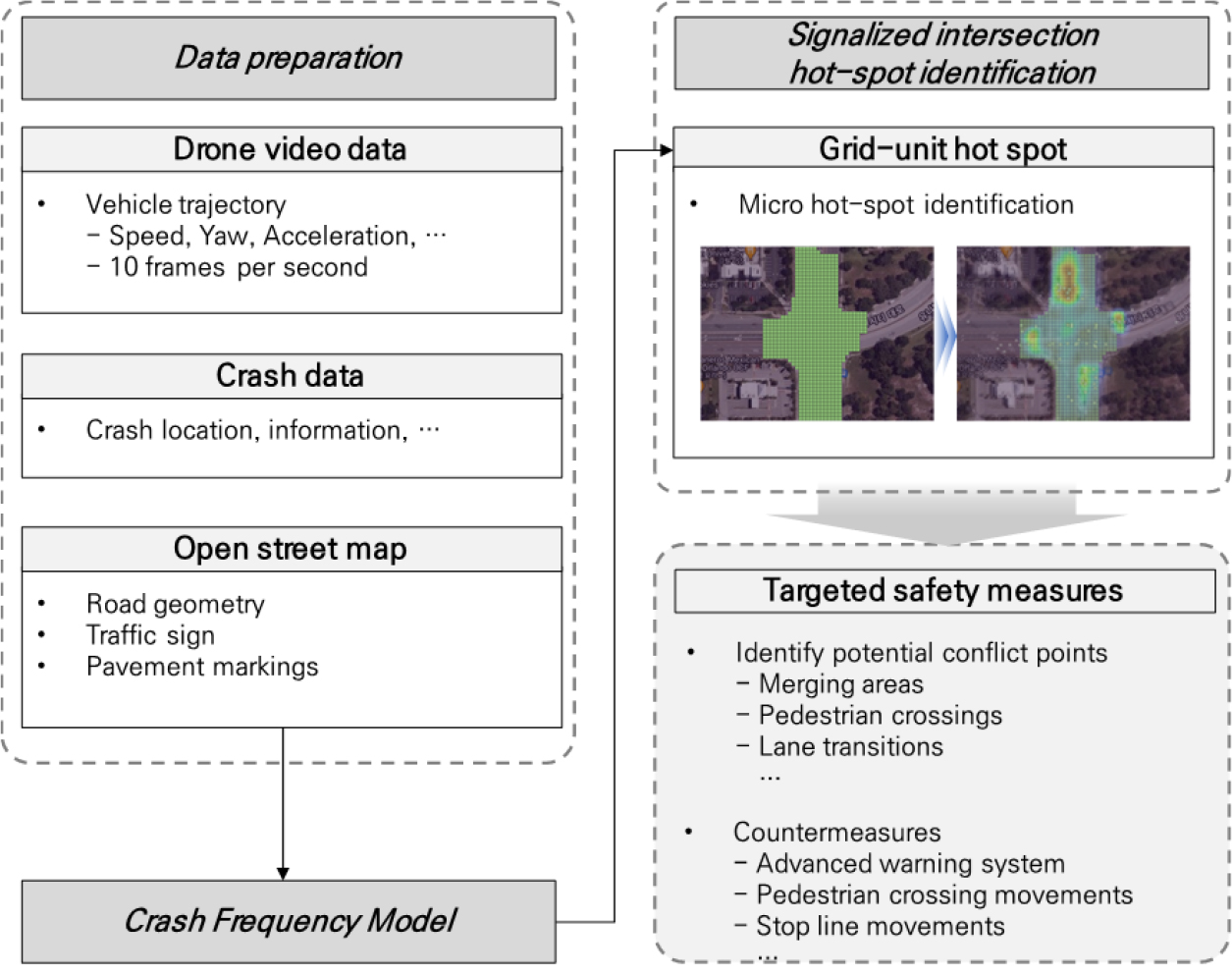
본 연구에서는 먼저 각 신호 교차로에서 상충 지표를 산출한 뒤, 해당 지표가 사고 위험을 효과적으로 포착할 수 있는지 평가하기 위해 Generalized Linear Model(GLM) 기반의 사고 빈도 모형을 개발하였다. 모형 개발 후, 사고 위험을 가장 잘 나타내는 상충 지표와 그 임곗값을 선정하여 교차로 유형별로 micro-hotspot을 식별하였다. 또한, 사고 위험 순위 상위 구간에서의 교통 및 도로 환경 특성을 분석하였다. 전체적인 연구 흐름도는 Figure 2와 같다.
1. 드론 데이터를 활용한 상충 지표 계산
본 연구에서는 신호 교차로에서의 사고 위험을 나타낼 수 있는 상충 지표로 Time to collision(TTC)과 Modified Time to collision(MTTC), Post Encroachment Time(PET)를 사용하였다. 본 연구에서는 드론 영상 기반 차량 궤적 자료에 기록되어 있는 차량별 Bounding box를 활용하여 Rear-end, Side wipe, Lane change, Crossing, Head-on 상충 등 다양한 유형의 상충 상황을 산출할 수 있도록 Joo et al.(2024)에서 제시한 상충 지표 계산 방법론을 사용하였다.
Joo et al.(2024)에서 제안된 incremental predictive conflict point search(IPCPS) 방법론은 휴리스틱 알고리즘으로, 다양한 교통 상충유형에서 상충 지점을 정확하게 찾아내기 위해 고안된 알고리즘이다. 해당 알고리즘에서는 차량의 미래 주행행태 고려하여 상충을 산출하며, bounding box를 사용하여 보다 정교하게 상충 발생 지점과 시점을 구한다. 또한, 이를 통해 측면 충돌, 후미 추돌 등 다양한 유형의 상충을 산출할 수 있다. IPCPS 알고리즘에서는 coarse search 단계에서 상충의 발생을 확인하고, fine search 단계에서 incremental search를 통해 정확하게 상충이 발생할 시점을 구한다. 본 연구에서는 Joo et al.(2024)에서 제안된 알고리즘과 동일하게 coarse search 단계를 0.5초, fine search 단계를 0.01초로 설정하였으며, TTC와 MTTC, PET 지표를 산출하였다.
TTC는 두 차량이 같은 속도와 같은 경로로 주행할 경우 충돌하는 데에 걸리는 시간으로, 값이 작을수록 안전성이 떨어진다고 할 수 있다. MTTC는 TTC 개념에서 차량의 상대적인 가감속도를 고려한 것으로, 마찬가지로 값이 작을수록 사고 위험이 증가한다. 선두 차량과 후행 차량의 위치 차이를 라고 하고, 선두 차량과 후행 차량의 속도 차이를 , 선두 차량과 후행 차량의 가속도 차이를 라고 할 때 TTC와 MTTC는 Equations 1, 2와 같이 구할 수 있다.
PET는 첫 번째 차량이 한 지점을 점유한 시간과 두 번째 차량이 연이어 도착한 시간의 차이를 말하며, 값이 낮을수록 충돌 확률이 높음을 의미한다. 즉, 수식으로 나타내면 첫 번째 차량이 도로상의 한 지점을 점유한 시간을 이라 하고, 두 번째 차량이 동일한 지점에 도착한 시간을 라고 할 때 Equation 3과 같이 표현할 수 있다.
기존 연구들에서는 상충 지표의 임곗값을 다양하게 설정하여 사고 위험 예측을 위한 모델링을 수행해왔다(Borsos et al., 2020). 본 연구에서는 각 상충 지표의 임곗값을 0.1초부터 3초까지 0.1초의 간격으로 다양하게 설정하여 분석을 수행하였다.
2. 사고빈도 모형 기반의 주요 상충 지표 도출
본 연구에서는 그리드 단위의 교차로 내부에서 발생한 사고 빈도수를 종속변수로, 각 임곗값에 대한 상충 지표 발생 건수를 독립변수로 하여 GLM 기반의 모형을 개발하였다. GLM은 사고 예측 모형뿐만 아니라 상충 예측 모형에도 활용되어 왔으며, 본 연구에서는 포아송 분포와 음이항 분포를 고려하여 GLM 모형을 구축하였다. E(Y|x)가 예측 사고 수이고, x가 다른 독립변수, C가 상충 지표일 때 C를 offset 변수로 부여하면 Equation 4과 같이 표현할 수 있다. 여기서 a, b, c는 각 변수의 coefficient를 의미한다.
본 연구에서는 GLM 개발 후 가장 사고 위험을 잘 설명하는 상충 지표와 상충 지표의 임곗값을 찾기 위해 각 임곗값 별 상충 지표를 노출 변수로 한 사고빈도 모형의 Akaike Information Criterion(AIC) 을 측정하였다. AIC 값이 가장 낮은 모형에서 노출 변수로 사용된 상충 지표와 임곗값을 해당 교차로에서의 사고 위험을 가장 잘 나타낼 수 있는 지표로 보았으며, 해당 지표로 micro-hotspot 식별을 수행하였다.
3. 신호 교차로 micro-hotspot 식별
마지막으로, 도출된 최적의 상충 지표와 임곗값을 활용하여 신호 교차로의 micro-hotspot을 식별하였다. 기존 macro 단위 및 micro 단위의 도로 사고 hotspot 식별 연구에서는 커널 밀도 함수 추정 방법론을 주로 활용해 왔으며 (Anderson, 2009; Thakali et al., 2015; Le et al., 2022), 본 연구에서도 Hotspot 식별을 위해서 커널 밀도 추정을 통해 상충 발생 빈도가 높은 세부 교차로 영역을 식별하였다.
커널 밀도추정은 kernel function을 이용하여 불연속성이 나타나는 히스토그램 기반의 밀도추정 방법의 문제점을 개선할 수 있는 방법론으로, 비모수적 밀도추정 방법론 중 하나이다. 커널 밀도추정 방법론을 사용하면, 관측된 데이터 각각을 중심으로 하는 커널 함수를 생성하고, 이를 모두 더한 후 전체 데이터 개수로 나누는 방법을 통해 히스토그램 확률밀도 함수를 smoothing 한 형태의 추정치를 내놓게 된다. 이러한 추정 방법론을 통해 상충 다발 지점과 인접한 지역에 미친 영향을 함께 일부 고려하여 micro-hotspot 식별을 수행할 수 있다. 본 연구에서는 기존 연구를 참고하여 셀 크기와 동일한 3.6m를 bandwidth로 설정하여 분석을 수행하였다(Thakali et al., 2015).
분석 결과
각 상충 지표 계산 결과, 다른 유형의 상충을 포착할 수 있는 것으로 나타났으며, 3가지 유형의 교차로에서 공통적으로 특정 접근로에서 상충이 많이 발생하는 것으로 나타났다. 이러한 양상을 면밀하게 살펴보기 위해 본 연구에서는 GLM을 통하여 각 교차로의 사고 위험을 가장 잘 나타내는 교통 상충 지표와 그 임곗값을 도출하였다. 각 지표에 대해서 0.1에서 3.0까지 0.1초 간격으로 임곗값을 달리하여 모형을 구축한 결과, 음이항 모형의 적합도가 더 높은 것으로 나타났으며, 음이항 모형 도출 결과로 교차로 별 최적의 상충 지표와 그 임곗값을 도출하였다.
종합적으로 세 교차로의 규모, 교통량, 회전 차량 비율 등의 차이에 따라 각 지표별 최적의 임곗값이 다르게 나타났다. 특히, 교차로별 상충 시각화 결과, MTTC와 TTC는 교차로에서 정지선 부근 후미추돌 사고 위험 상황을, PET는 회전 교통류의 사고 위험 상황을 효과적으로 포착하는 것으로 확인되었다. 결과적으로, 세 교차로 중 가장 차선 수와 교통량이 많고 교차로의 접근부에서 상충 상황이 빈번하게 발생하는 Intersection A의 경우 임곗값이 1.8s일 때 MTTC 지표가 가장 사고 위험 상황을 잘 대변하는 것으로 나타났다. 3지 신호 교차로이지만 회전 교통량은 Intersection E에 비하여 적은 Intersection D의 경우 임곗값 1.2s의 MTTC 지표가 가장 잘 나타내는 지표로 도출되었다. 마지막으로, 대형 주차장으로 진입하는 좌회전 교통류가 많으며, 회전 교통류로 인한 상충 위험 상황이 많이 발생하는 Intersection E의 경우 임곗값이 1.7s일 때 PET 지표가 가장 사고 위험 상황을 잘 대변하는 것으로 나타났다. 따라서 각 지표를 사용하여 hotspot 식별을 수행하였다. GLM 구축 결과 각 상충 지표 및 임곗값별 AIC를 나타낸 그래프는 Figure 3과 같다.
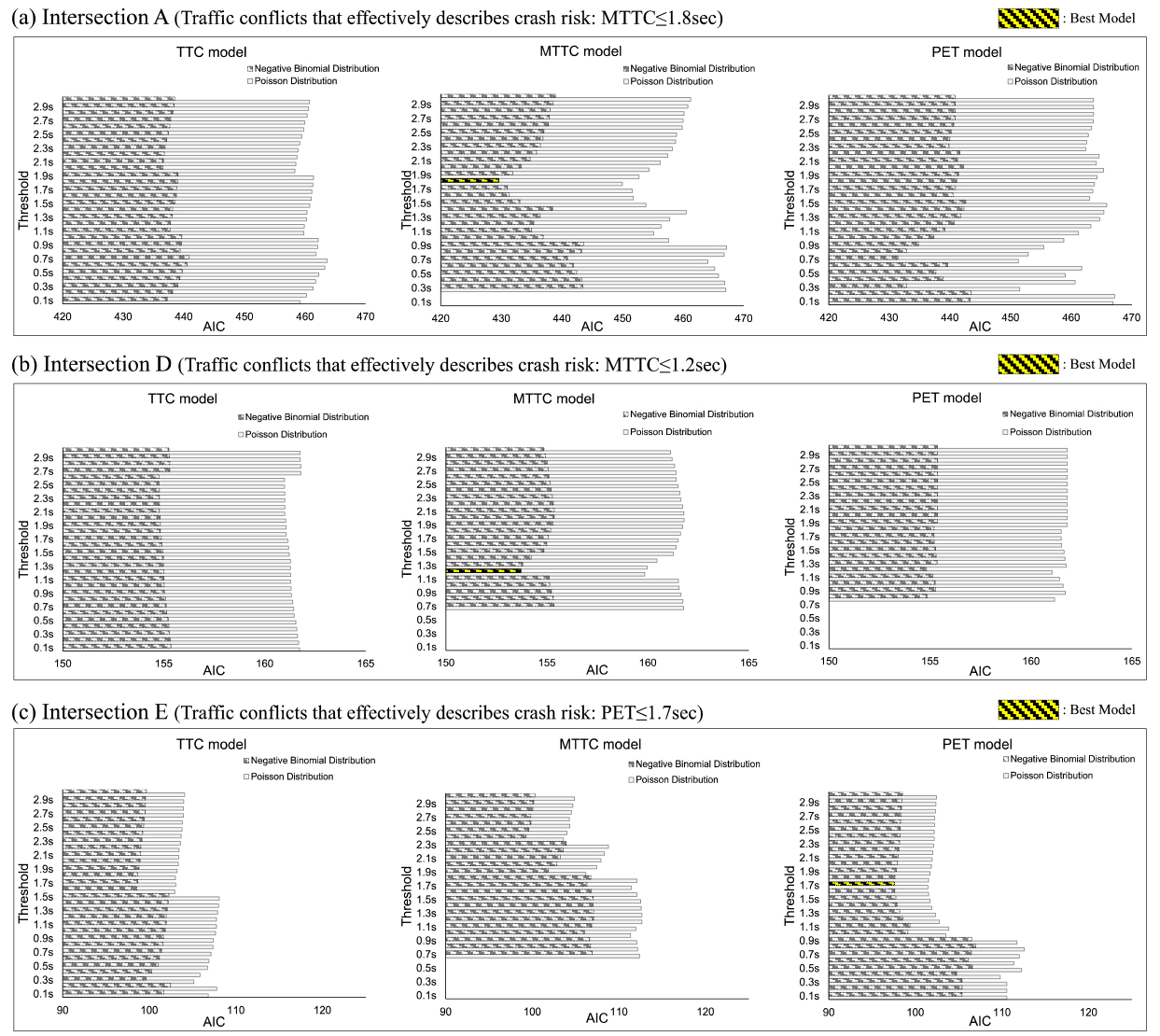
Figure 3에서 일부 상충 지표가 매우 적은 임곗값에서 관찰되지 않은 것은 Intersection D와 Intersection E의 교통량 특성과 데이터 수집 방식에서 기인한 것으로 판단된다. 두 교차로 모두 교통량이 Intersection A에 비하여 상대적으로 적으며, 특히 드론 데이터가 낮 시간대의 특정 시간 동안에만 수집되었기 때문에 상충 위험 상황이 충분히 포착되지 않았을 가능성이 높다. 이러한 제한된 데이터 특성으로 인해 사고 상황에 근접한 짧은 임곗값에서 상충 상황이 관찰되지 않은 것으로 판단된다.
본 연구에서는 bandwidth를 3.6m로 설정했을 때의 커널 밀도추정 결과와 각 교차로의 기하구조 및 도로 환경 정보를 바탕으로 micro-hotspot 지점으로 선별된 구간에서의 특징을 살펴보았다. Intersection A, D, E의 micro-hotspot 식별 결과와 세부 시설물을 확인한 결과는 Figures 4, 5, 6과 같다.
Intersection A는 차선 수가 많고, 교통량이 많은 4지 교차로로, 다른 교차로들에 비해 상충이 많이 일어나고, 교통사고도 많이 발생한 교차로이다. Intersection A에서는 상충 지표 계산 결과, 특히 정지선 부근에서 상충이 많이 발생하는 것으로 나타났다. GLM 개발 결과, Intersection A에서 사고 위험을 잘 분석할 수 있는 지표로는 MTTC가 선정되었으며, 그 임곗값은 1.8s가 선정되었다. 해당 기준에 따라 커널 밀도추정을 통해 micro-hotspot을 식별한 결과, 교차로 접근부에서 상충이 많이 발생하는 것으로 나타났다(Figure 4). 특히, 정지선과 횡단보도 부분에서 MTTC 상충이 많이 발생하는 것으로 나타났으며, 교차로 내부에서는 좌회전 신호를 받아 좌회전하는 차량이 정유하는 구간에서 상충이 많이 발생하였다.
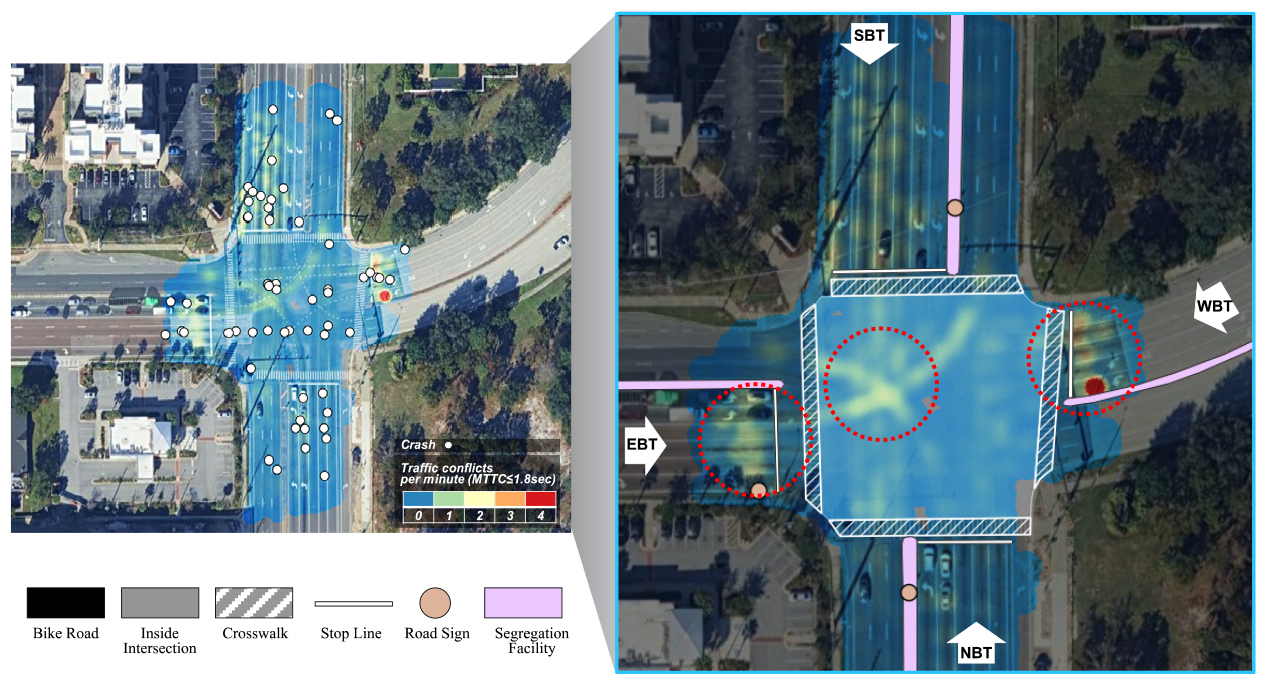
Intersection A 구간에서는 이러한 상충을 줄이고, 사고 위험을 낮추기 위하여 정지선 또는 횡단보도의 위치를 조정하는 등의 조치를 취할 수 있으며 해당 구간에서 좌회전하는 차량이 녹색 신호에 모두 교차로를 빠져나올 수 있도록 신호체계를 점검할 필요가 있다.
Intersection D 구간은 Intersection E와 연속적으로 존재하는 3지 신호 교차로로, University of Central Florida의 student garage로 향하는 회전 차량 교통량이 많은 구간 중 하나이다. 본 구간에서는 MTTC 지표가 가장 사고 위험상황을 잘 포착하는 것으로 나타났으며, 그 임곗값은 1.2s로 도출되었다. 세부적으로 도출된 micro-hotspot을 살펴보면, 교차로로 접근하는 North Bound Through traffic에서 사고 위험도가 높게 나타났으며, North bound through traffic에서 최우측 차로에서의 상충이 비교적 높게 나타났는데, 해당 구간에 자전거 전용 도로가 있어 이러한 경향이 관측된 것으로 예상된다. 따라서, Intersection D 구간에서는 차량의 원활한 회전과 교차로 통과를 위해 컬러레인 등을 이용하여 원활한 차선 변경을 전 구간에서 유도할 필요가 있으며, 자전거전용도로에서 주행 중인 자전거와 north bound through의 우측 차로에서 주행 중인 차량이 충돌하지 않도록 자전거전용도로를 물리적으로 분리하는 등의 사고 위험을 줄이기 위한 노력이 필요한 것으로 판단된다(Figure 5).

Intersection E의 경우 Intersection D의 사례와 마찬가지로 Student garage로 향하는 회전 차량이 많은 3지 교차로이다. Intersection E는 임곗값 1.7s 기준의 PET 지표가 사고 위험을 잘 나타내는 지표로 선정되었으며, 다른 교차로에 비해 임곗값 기준이 커 커널 밀도추정 결과 교차로 전반에 걸쳐 상충이 발생한 모습을 보였다(Figure 6).

Intersection E의 경우 North bound section과 South bound section의 정지선 부근에서 상충이 많이 발생하는 것으로 나타났으며, 특히 North bound left vehicle이 있는 North bound section의 최 좌측 차로에서 상충이 많이 발생하는 것으로 나타났다. 따라서 교차로의 정지선 위치를 조정하거나 원활한 좌회전을 유도하기 위한 안전표지의 추가적인 설치 또는 유도선의 설치를 고려할 필요가 있다. 또한, Intersection D와 마찬가지로 자전거전용차로가 존재하는데, 차량과의 상충 발생을 막기 위해 차도와 자전거전용도로를 물리적으로 분리할 필요가 있다.
결론 및 향후 연구
신호 교차로는 교통량이 많고 다양한 이동 수단 간 상충이 발생하는 지점이기 때문에 사고 발생 개연성이 높고 심각도가 높은 사고가 발생할 수 있어 교통안전에 각별한 주의가 필요하다. 교차로 내부에서도 다양한 상충 지점이 존재하며, 사고 위험과 심각도를 악화시키는 세부 구역이 존재할 수 있으므로 교차로에서의 micro-hotspot을 식별하고, 해당 구간에서의 교통안전 제고를 위한 대응조치를 마련하는 연구가 필요하다. 즉, 안전 개선을 위한 신호 교차로를 찾는 기존 hotspot 식별 연구와는 별개로 신호 교차로에서의 사고 위험을 효과적으로 관리하기 위해서 우선적으로 사고 위험이 많이 발생하는 교차로의 micro-hotspot을 식별할 필요가 있다. 또한, 사고 이력 자료만을 가지고는 사고가 적게 발생하지만, 실질적인 위험은 크게 나타날 수 있는 교차로 세부 구역에서의 위험을 전반적으로 평가하지 못할 수 있으므로 교통 상충 지표를 활용한 교차로 안전성 평가를 도입할 필요가 있다.
본 연구에서는 신호 교차로 드론 데이터에서 추출된 차량 주행 궤적 데이터를 기반으로 다양한 상충 지표를 산출하여, 신호 교차로의 micro-hotspot을 식별하고자 하였다. 상충 지표 산출을 위해 기존 연구를 참고하여 IPCPS 방법을 적용하였으며, 이를 통해 다양한 유형의 교통 상충을 정밀하게 포착할 수 있었다(Joo et al., 2024). 또한 음이항 분포 기반의 일반화 선형 모델을 개발하여 각 교차로 유형에 맞는 사고 위험을 판단할 수 있는 상충 지표와 그 임계값을 도출하였다. 본 연구에서는 해당 지표를 바탕으로 커널 밀도추정을 수행해 교차로의 micro-hotspot을 식별하고, 도로 및 교통 환경 정보와 연계하여 각 교차로에서의 micro-hotspot에 대한 세부 분석을 진행하였다.
주요 분석 결과는 다음과 같다: 첫 번째로, 차선 수가 많고 교통량이 많은 4지 교차로의 경우 주도로의 정지선 부근에서 보행자와 차량이 충돌하지 않도록 각별한 주의를 기울여야 하며, 회전 차량과 직진 차량이 상충하지 않도록 정지선과 횡단보도의 위치를 적절하게 설정하고 검토할 필요가 있다. 두 번째로, 회전 차량이 상대적으로 많은 3지 교차로에서는 회전 차량에게 적절한 지시를 내릴 수 있도록 도로 표시와 표지 선택 및 배치에 신중을 가해야 하며, 마찬가지로 정지선 부근에서 상충 위험이 높게 나타나 정지선과 횡단보도 위치를 면밀히 검토할 필요가 있었다. 마지막으로, 회전하는 차량이 차선 변경을 잘 수행할 수 있도록 유도할 수 있는 조치가 필요하며, 자전거 전용 차로 존재하는 차선의 경우 자전거와 일반 차량이 상충하는 일이 적게 발생하도록 두 차로를 물리적으로 분리하거나, 그것이 어렵다면 운전자와 자전거 이용자 모두에게 주의를 줄 필요가 있다.
본 연구의 방법론을 통하여 다른 교차로 유형에서도 micro-hotspot 식별을 수행할 수 있으며, 안전대책이 필요한 구간과 그 구간의 특징을 면밀하게 파악할 수 있을 것으로 기대한다. 도로 운영자와 정책 입안자들은 micro-hotspot 분석 결과를 바탕으로 시행할 수 있는 교통안전 정책을 검토하고, 모니터링할 수 있으며, 추후 각 교차로 유형별 micro hotspot이 나타나는 유형을 정리하여 도로 설계 시 이를 고려하도록 지원할 수 있다.
하지만 본 연구에는 다음과 같은 한계점이 있다. 본 연구에서는 첨두시간대, 야간, 악천후 환경을 고려하지 않았기 때문에, 유고 상황에서 신호 교차로의 micro-hotspot을 식별하기 위해 최악의 상황을 가정하여 사고 위험을 평가할 필요가 있다. 이를 위해서는 다양한 시간대에서 수집된 정밀한 차량 주행 궤적 데이터가 추가적으로 필요할 것으로 예상된다. 또한, 더욱 다양한 지역과 구간에서의 데이터를 수집하여 micro-hotspot 도출 결과를 보다 일반화할 필요가 있다. 마지막으로, 본 연구에서 사용된 IPCPS 알고리즘은 모든 교차로 상황에서 상충을 산출하는 데에 일정한 성능을 발휘하는 것으로 나타났으나, 일부 교차로에서는 짧은 임곗값을 기준으로 한 상충 상황이 산출되지 않았다. 이는 본 연구에서 수집 및 사용한 데이터의 시간적·공간적 한계로 인해 발생한 문제로 판단되며, 따라서, 향후 연구에서는 최적 상충 지표와 임곗값을 도출하기 위해 더 긴 시간대에 걸쳐 데이터를 수집하고 이를 바탕으로 추가적인 검증을 수행할 필요가 있다.
