

서론
최근 5년간(2014-2018년) 중앙정부의 전체 예산은 매년 4.9%의 비율로 증가하고 있으나 도로 부문의 예산은 2014년 8.5조 원에서 2018년 6조 원으로 매년 8.5%의 비율로 감소하여 이는 전체 SOC분야 예산의 감소추세보다 더 높은 것으로 나타났다. 또한 국토교통부 자료에 의하면 도로시설물의 노후화(30년 이상)의 비율은 2020년 11.9%에서 다가오는 2032년에 34.1%로 약 22%p 상승될 전망이다. 이처럼 사회간접자본의 유지관리를 위한 예산이 줄어들고 시설물의 노후화로 인한 문제를 해결하기 위해선 체계적인 도로 유지관리 시스템의 구축이 필요하다(Do, 2020).
또한 「도로법」의 개정(2011년) 및 「지속가능한 기반시설 관리 기본법」의 신설(2019년)됨에 따라 국토교통부 장관은 기반시설의 체계적인 유지관리와 성능개선을 위해 5년 단위의 기반시설 관리에 관한 기본계획을 수립해야 하며 관리 감독 기관의 장은 기본계획에 따라 5년 단위의 소관 기반시설에 대한 관리계획을 수립해야 한다. 지방자치단체(이하, 지자체)에서는 노후 기반시설 관리 조례 등 도로시설물 성능평가에 대한 법적 절차를 마련하고 있다. 특히, 서울시는 2016년 「노후기반시설 성능개선 및 장수명화 촉진 조례」를 제정하였으며 부산, 전남 등도 유사한 노후 인프라 관리 제도를 제정하는 추세이다.
특히 체계적인 도로포장 유지관리를 위해 국토교통부, 서울시, 경기도 등에서는 도로포장관리시스템(Pavement Management System, PMS)을 개발하여 고가의 도로 조사 장비(Road Scanner) 등을 활용하여 조사를 수행하고 있다.
그러나 중 ‧ 소규모의 지자체는 예산과 인력이 부족하여 조사장비의 구입 및 운영을 수행하기 어려운 실정이며 이러한 문제로 인하여 도로상태 조사 이후 수행하여야 하는 도로의 상태평가, 도로의 파손원인 분석, 파손원인에 대응하는 도로 설계, 공법 시공품질 관리 업무를 시스템적으로 수행하지 못하고 있다. 이러한 문제를 극복하기 위해 최근에는 드론, MMS, IoT(Internet of Things)센서 등 첨단 조사장비의 활용에 대한 필요성이 증가하고 있다(Do, 2020; Mei and Gul, 2020).
따라서 본 연구는 인공지능 기반의 데이터 전처리 기술과 상대적으로 가격이 저렴한 MMS장비와 드론을 활용하여 도로 노면의 균열을 판단하기 위한 아스팔트 노면의 균열 검출 방법론을 제시하고자 한다.
선행연구
국내 ‧ 외에서 드론과 MMS장비, 스마트폰, 블랙박스 카메라 등 다양한 장비를 활용하여 도로 노면 영상을 취득하고 인공지능을 활용하여 도로의 파손여부를 도출하는 연구가 활발하게 이루어지고 있다. 균열조사 전문장비를 활용한 인공지능기반의 도로균열 도출과 관련된 선행 연구들을 살펴보면 Zhang et al.(2017)은 CNN(Convolution Neural Network)모델에서 착안한 Crack Net을 개발하였으며 5개의 레이어층과 360개의 채널을 두어 병렬로 연결한 알고리즘으로 구성하여 일반적인 다른 모델을 활용한 것보다 약 15%p의 균열 분류에 대한 정확도를 도출하였다.
Chun et al.(2021)은 균열조사 장비를 활용하여 6가지의 종류로 구분된 자료를 이용하여 라벨링과 딥러닝 알고리즘(ResNet기반)으로 학습을 진행하여 정확도를 향상시키는 방안을 제시하였다. Gavilan et al.(2011)은 라인스캔 카메라와 레이저 장비 등이 탑재된 조사차량을 이용하여 크랙을 검출하는 방안을 제시하는 연구를 수행하였다. 또한 Zhang et al.(2018)은 3차원 레이저 장비가 탑재된 차량을 이용하여 포장의 결함을 탐지하는 연구를 수행한 바 있다.
반면, 스마트 건설기술의 도입으로 인해 기존 장비보다 저렴한 방법으로 데이터 취득하는 연구와 딥러닝 기술을 이용하여 도로표면의 균열을 검출해내는 연구도 다수 진행되고 있다. Sim et al.(2019)은 Fast R-CNN을 활용하여 도로 노면의 균열을 하나의 객체로 인식하는 연구를 진행하였으며 합성곱 알고리즘을 이용하여 영상 내에서 도로 파손유무와 그 영역을 추정하는 새로운 심층 신경망을 개발하였다. Jeon et al.(2018)은 도로 노면 파손 유형 중 포트홀 탐지를 위하여 의미론적 객체분할(Semantic Segmentation)을 구현하여 파손 유형을 구분하고 균열이나 포트홀과 같은 파손의 검출 가능성을 도출해 내었지만, 블랙박스와 핸드폰의 화질과 고속 주행에 따른 데이터 품질의 문제 등의 한계도 있었다.
한편, MMS나 드론을 활용한 연구로는 Choi et al.(2018)은 MMS장비를 이용하여 취득한 영상정보를 이용하여 아스팔트 도로포장의 균열 상태를 판정하는 연구에서 CNN망을 기반으로 YOLO(You Only Look Once)를 활용하여 균열을 5단계 등급을 분류하는 기준과 적용가능성을 제안하였다.
드론을 활용한 연구로는 Kim et al.(2019)은 지상으로부터 15m 높이에서 드론으로 촬영한 영상 데이터를 5가지로 분류하여 라벨링을 진행하고, 해당 클래스를 검출하기 위한 학습 알고리즘은 Fast-RCNN을 활용하여 도로 균열을 검출하는 방안을 제시하였다.
Dadrasjavan et al.(2019)은 드론을 활용하여 도로노면 데이터를 취득하고 해당 데이터에서 균열을 도출하기 위하여 Ortho변환을 거쳐 SVM(Support Vector Machine)을 활용하여 균열을 분류하는 방안을 제시하여 81%의 정확도를 얻었다. Naddaf-Sh et al.(2019)도 드론으로 취득한 영상자료를 이용하여 CNN 기반 크랙 검출 방안을 제시하는 연구를 수행하여 드론의 활용가능성을 검증한 바 있다.
기존 도로표면의 결함을 탐지하는 연구에서는 높은 화소와 정형화된 데이터 형식으로 도로 조사 전문장비들을 활용한 연구가 대부분이다. 각 연구마다 방법론은 상이하며 도로 표면을 인식하기 위한 다방면의 라벨링 방법을 활용하여 정확도를 높이는 방안을 제시하고 있다. 몇몇 저가의 장비를 운영하여 도로상의 균열을 검출하고자 진행된 연구도 있었지만 실제 고가의 장비와 같이 정형화된 알고리즘 결과물 데이터를 얻기에 어려움이 있다.
고가의 장비를 갖추기 어려운 환경에서는 도로 균열 조사에 제약이 많은 것이 현실이며, 특히 지자체 관할 도로 등의 연구에 적용하기에는 예산, 전문가 등의 한계가 있다.
이에 본 연구에서는 혼잡한 도시부 도로 등에서 DB 구축으로 활용성이 높은 MMS와 드론을 기반으로 한 도로균열 모니터링 방법을 제시하고 그 적용가능성을 검증하고자 한다.
AI기반 드론과 MMS를 활용한 도로 균열 검출
본 절에서는 4단계의 인공지능 기반 드론과 MMS를 활용한 도로 균열 검출로직에 대해 살펴보기로 한다. 인공지능을 활용할 시 비정형데이터를 정형화하는 과정이 매우 중요한데, MMS와 드론으로 취득되는 영상데이터는 각각 촬영방법과 촬영 각도에 따라 도로의 형태가 다양하기 때문이다.
따라서 첫 단계로 드론과 MMS를 이용하여 도로를 촬영하는 즉, 도로의 표면 상태를 모니터링 하는 단계로 데이터 취득 단계라 할 수 있다. 상이한 영상 데이터를 같은 알고리즘에 적용하기 위해서는 각 장비의 특성을 고려하여야 한다.
두 번째 단계는 또한 촬영된 데이터를 인공지능 알고리즘을 활용하여 결과도출이 가능한 형태로 라벨링 과정을 진행하는 것이다. 세 번째 단계에서는 라벨링된 데이터를 원하는 인공지능 알고리즘 결과물로 도출해내기 위한 설계 단계를 거쳐 마지막으로 학습 및 평가단계로 이어지는 과정이다.
1. 드론과 MMS를 활용한 도로 모니터링
데이터를 수집하기에 앞서 Table 1에서 확인할 수 있는 바와 같이 각 장비의 특성을 살펴보고 이를 기반으로 촬영 방법을 정하게 된다.
자동차 보닛 위에 장착하여 데이터 수집을 진행하는 MMS는 도로 노면영상의 데이터 품질을 확보하기 위하여 1개 차로를 기준으로 촬영하였으며, 드론데이터는 주변 환경(가로수, 전봇대 등)과 노면 상태가 사진에서 판별이 가능한 고도 15m로 유지하며 왕복 6차로를 동시에 촬영하여 영상데이터를 수집하였다. 사진 품질에 영향을 주는 해상도는 두 장비모두 높은 화소수를 가지고 있어 촬영방법에 따른 도로 균열데이터가 육안으로도 충분히 분별 가능하였다.
각 장비의 촬영가능 최대 속도는 MMS 100km/h 이상 가능하지만, 차량 보닛에 장착하여 시속 60km/h로 주행하면서 데이터를 수집하였다. 드론은 최대 속력 58km/h이지만 안전문제와 차로를 따라 촬영해야 하기 때문에 수동촬영을 진행하였다. 따라서 사람의 도보 속도인 2.5km/h의 속력으로 데이터를 수집하였다. 두 장비 모두 영상사진에 GPS정보가 자동으로 촬영된 이미지에 입력되며 수집된 데이터의 크기는 2,448×2,048×3 픽셀과 3,840×2,160×3 픽셀의 크기를 가진다. 데이터 수집결과 MMS 1,390장 드론 642장의 데이터를 취득하였다.
Table 1.
Filming device specification


2. 데이터 정제
MMS와 드론으로 수집된 영상데이터를 지도학습(supervised learning) 인공지능 알고리즘으로 학습시키기 위해서 학습 기준을 설정하고 기준에 맞춘 학습데이터 생성이 선결되어야 한다. 본 연구에서 결과를 도출해내기 위한 학습기법은 End-To-End방식으로 이는 데이터 처리의 여러 단계에서 필요한 과정을 한 번에 처리하기 위함이다. 즉 데이터가 입력되었을 때 출력되는 결과까지 분석가의 개입이 없도록 완전 자동화를 위하여 선택하였다.
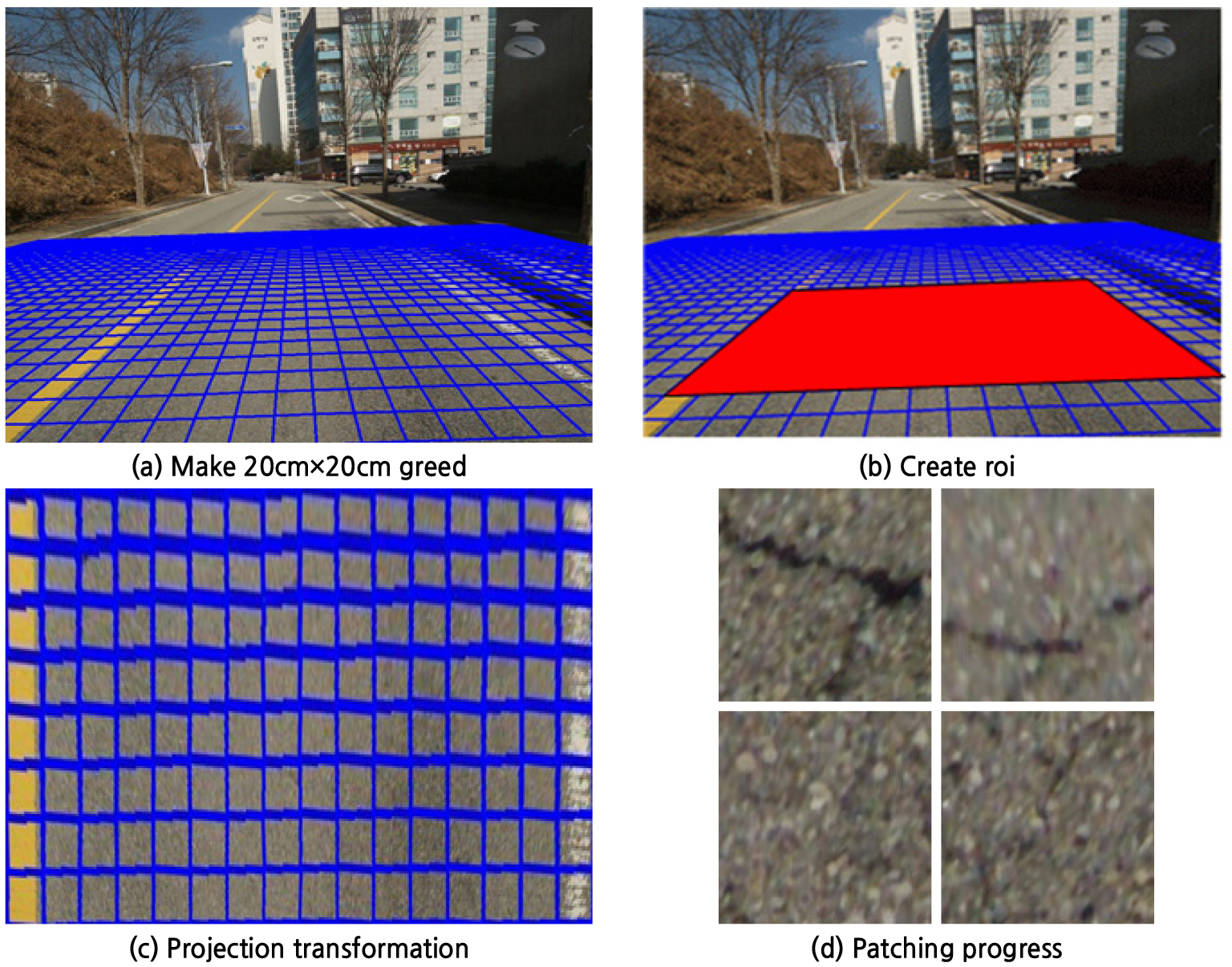
MMS데이터를 정제하기 위하여 Figure 1과 같은 순서로 학습데이터를 구축하였다. 우선 수집된 데이터 위에 가상의 그리드를 생성하였다. 생성된 그리드의 크기는 실제 도로의 20cm×20cm 크기를 가지고 있으며 차량의 주행방향에 따라 연속적으로 그리드를 생성하였다.
데이터 촬영 시 일반 또는 고속 주행 시 2m의 간격으로 사진데이터를 생성하기 때문에 사진에서 검출할 영역을 분리해야 한다. 분리 결과 Figure 1(b)의 ROI(Region of Interest)에 나타난 바와 같은 영역이 도출 되었으며, 도출된 영역은 가로 16칸, 세로 9칸의 그리드(320cm×180cm)이며 좌표는 사진데이터 속 좌표에서 추출된 4개의 점(좌상, 좌하, 우상, 우하)의 좌표를 대상으로 Cropping하여 2차원 데이터로 투영변환을 진행하였다.
그러나 이러한 과정을 통해 생성된 이미지 Figure 1(c)는 인공지능 알고리즘을 활용하기에 필요한 컴퓨터 자원이 도로의 균열을 검출하기에 필요한 컴퓨터 자원이 상대적으로 늘어나 적합하지 않다는 단점이 있다. 따라서 Figure 1(d)와 같이 패치화(patching)를 진행하였다. 생성된 패치의 크기는 256×256×3의 픽셀을 가지고 있으며 실제 도로 스케일 20cm×20cm를 반영하였다.
반면 드론으로 촬영한 데이터는 수직에서 촬영하기 때문에 Figure 2와 같이 별도의 투영변환 없이 바로 패치화를 진행할 수 있다. 실제 도로의 스케일은 촬영고도를 고려하여 40cm×40cm로 설정하였으며 하나의 패치당 크기는 MMS데이터와 마찬가지로 256×256×3의 크기로 설정하였다.

학습데이터를 생성하기 위하여 Figure 1과 Figure 2에서 생성된 패치들 속에 나타난 도로 균열들의 특징을 도출하였다. 패치상에 나타난 특징에 따라 분류한 결과를 요약하여 Table 2와 같은 데이터 수를 취득할 수 있었다. MMS패치에서 나타난 도로 표면상의 형태는 2가지 즉, 균열이 있는 패치와 균열이 없는 패치로 구분이 가능하며 이를, Crack, None으로 2가지의 분류로 구성하여 Binary형식으로 라벨링을 진행하였다.
손실함수로는 MSE(Mean Square Error)을 사용하였으며, 인공지능 알고리즘의 최종 마지막 층에서 분류하기 위한 노드로 Sigmoid를 설정하여 0-1사이의 값이 출력될 수 있게 하였다.
드론데이터에서 나타난 특징은 3가지로 분류하였는데, 균열이 있는 패치, 균열이 없는 패치, 도로부분이 아닌 영역이 그것이다. MMS와 달리 Crack, None, Other 3가지의 분류로 라벨링을 진행하였기 때문에 Categorical로 라벨링을 진행하였다. Loss를 계산하기 위한 손실함수로는 Cross Entropy를 활용하여 데이터셋 정의를 마쳤다.
또한 알고리즘의 마지막 층에서 분류하기 위한 노드로는 Softmax 분류를 활용하여 분류가 진행되도록 하였다. Softmax로 분류하기 때문에 Crack=[1,0,0], None=[0,1,0], Other=[0,0,1]로 구분되어 Cross Entropy 계산이 진행될 수 있도록 데이터를 생성하였다. MMS와 드론데이터 생성결과 총 MMS 약 2만 5천장, 드론 약 3만 7장을 취득할 수 있었다.
Table 2.
Data classification
3. 인공지능 알고리즘 설계
본 연구에서는 균열을 분류해 내기 위한 알고리즘을 선정하기 위하여 8가지의 알고리즘을 적용하였다. 그 가운데에서 균열과 균열이 아닌 패치를 분류 가능한 알고리즘은 4가지가 도출되었으며, 해당 알고리즘은 Basic CNN, Resnet152, InceptionResnetV2, Mobilenetv2이다. MMS데이터에서 활용한 균열분류 결과를 참고하여 가장 성능이 높았던 Mobilenetv2를 활용하여 드론에 적용하였다.
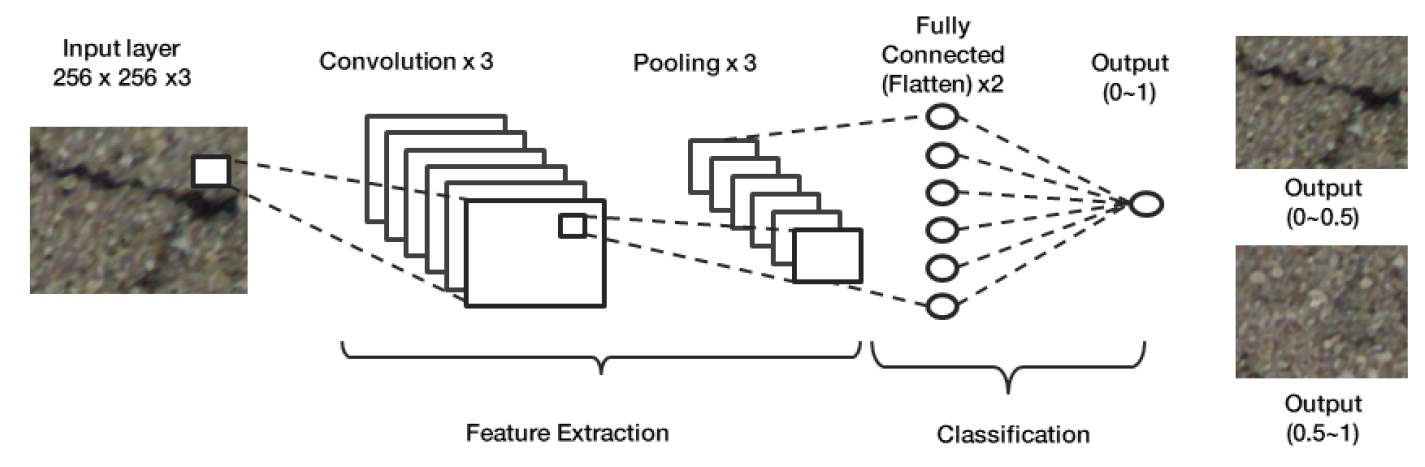
한편 학습 방법은 Transfer Learning을 도입하였으며 Basic CNN을 제외한 알고리즘은 모두 과거의 학습 과정을 다시 불러와 학습하였다. Basic CNN의 입력 층은 256×256×3의 크기로 설정하고 3개의 합성곱층과 풀링층을 두었다. 각 활성화 함수로 0-1사이의 값을 도출할 수 있도록 구성하였으며, 합성곱 층 이후 2차원 형태의 텐서를 1차원의 노드로 변환하는 레이어를 생성한 후 분류를 진행하였다. Basic CNN의 모델구조는 Figure 3과 같다.
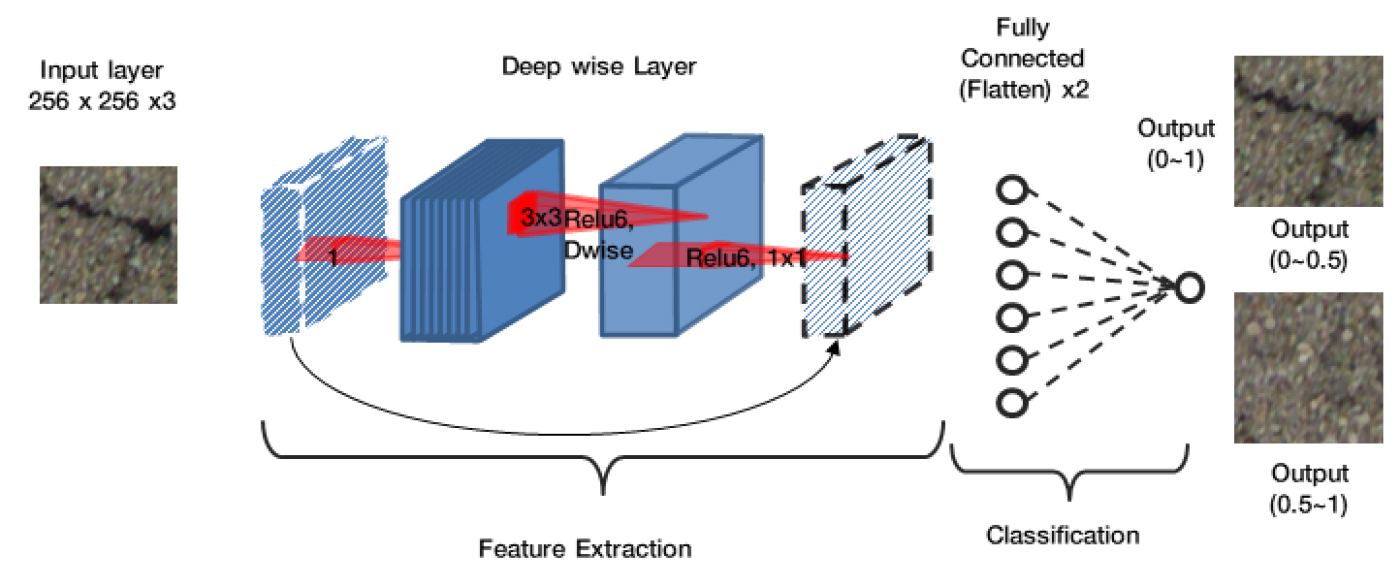
Mobilenetv2는 Depthwise Separable Convolution개념을 도입하여 연산 량을 매우 줄인 알고리즘이지만 Inverted Residual 구조를 차용하여 새로운 Convolution망을 만들지 않고 과거에 만들어진 망을 그대로 가져와 재사용하는 특성을 가진 알고리즘이다(Sandler et al., 2018). 입력 층은 Basic CNN과 같이 256×256×3의 크기로 설정하였고 그 뒤에 Mobilenetv2의 레이어와 파라미터들을 그대로 적용하였다.
마지막 결과 도출을 위한 출력층은 Basic CNN과 마찬가지로 결과를 출력하기 위하여 Flatten 레이어를 생성하고 학습결과를 분류하는 Softmax 노드를 생성하였다. Mobilenetv2의 균열 분류에 맞게 변환된 모델구조는 Figure 4와 같다.
4. 학습 및 평가
본 연구에서는 구축된 인공지능 알고리즘을 학습시키기 위하여 기존 Pre-Trained 모델을 활용한 Transfer Learning 방법을 도입하였다. Basic CNN과 MobileNetv2 알고리즘에 MMS데이터와 드론데이터를 분리하여 각각 학습을 진행하였으며 총 4회에 거친 학습과정을 거쳤다. 학습을 위한 컴퓨터 환경과 사용한 S/W 등에 대해 요약하면 Table 3과 같다.
Table 3.
Configure the learning environment
학습 진행을 위한 컴퓨터 사양으로는 CPU: 8-core 2.1GHz, RAM: 128GB, Window 10 pro, GPU: 24GB을 구성하였다. 학습과 결과도출을 위한 라이브러리로 Keras, Tensorflow 등을 활용하였다. 학습을 위한 파라미터는 Batch와 Epoch은 각각 300, 50을 두었으며 1 Epoch당 Train데이터와 Validation데이터를 비교하여 학습이 종료된 이후 Validation 값이 제일 높은 Epoch을 저장하도록 설계하였다.
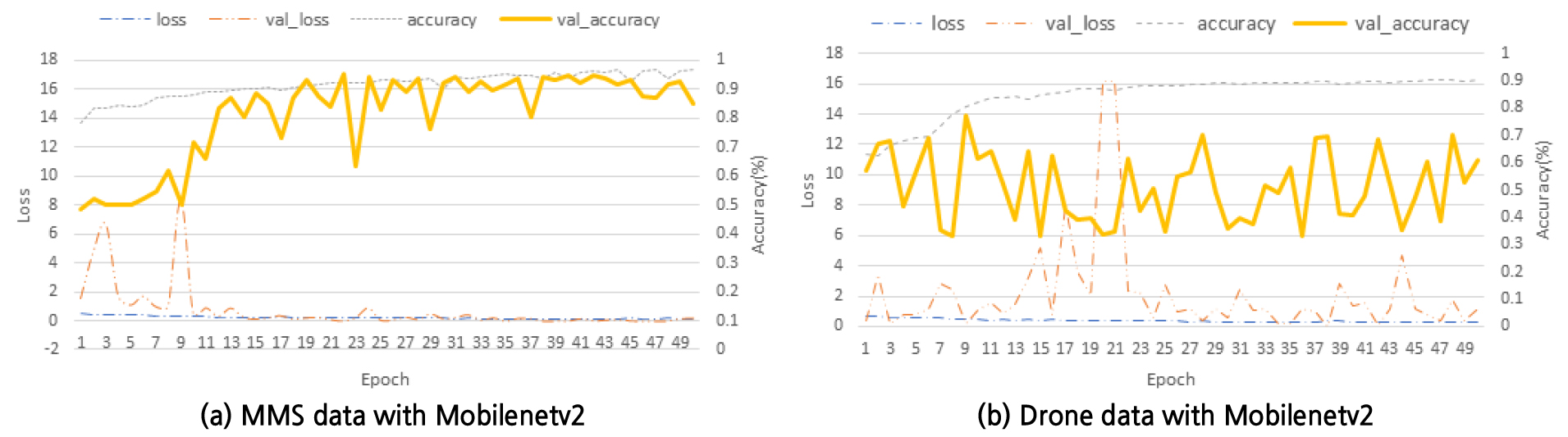
또한 각 레이어마다 최적화 알고리즘으로 Kingma and Ba(2014)의 Adam(A method for stochastic optimization)을 사용하였다. Adam은 Ruder(2016)에 따르면 Mnist분류에서 가장 높은 성능과 학습 속도가 도출되었으며 논문에서 사용된 최적화 알고리즘에 맞추어 0.001을 두고 학습을 진행하였다. 학습을 진행한 결과 Figure 5와 같이 학습이 진행되었다. MMS데이터를 학습하는 과정에서 loss와 accuracy가 각각 0과 1에 수렴하는 모습을 보였지만 드론데이터에서는 학습이 진행될수록 노이즈가 많이 발생하였다. 따라서 MMS와 드론을 학습하는 도중 가장 높은 정확도를 보인 Epoch의 파라미터 값을 각각 저장하였다.
학습이 완료된 후 정확도가 가장 높은 알고리즘의 선택과 기존 알고리즘과의 성능 차이를 평가하기 위해 6가지의 평가 지표인 P(Precision), R(Recall), F1(F1Score), ACC(Accuracy), PPV(Positive Predictive Value), NPV(Negative Predictive Value)을 활용하여 결과를 산출하였다(Table 4).
테스트 결과 Mobilenetv2에서 MMS 데이터는 95%의 정확도를 도출하였고 드론 데이터에서 78%의 정확도를 얻을 수 있었다.
분류 결과를 살펴보면 전반적으로 모든 알고리즘에서 각 장비별 라벨링을 진행한 방법대로 분류가 가능하였지만 드론 데이터에서 Basic CNN은 균열이 아닌 부분(None)은 분류하지 못하였다. 이는 작은 신경망에서는 드론으로 촬영한 데이터에서 분류가 어렵기 때문이다.
그 결과로 도로가 아닌 부분을 제외한 모든 도로상의 균열과 균열이 없는 패치들이 전부 균열이 있는 패치로 분류되었고 R값도 제일 높게 도출되었다. 그 외 알고리즘들은 전부 균열이 있는 패치와 없는 패치들을 구분 가능하였고 MMS데이터와 드론데이터 모두 타 알고리즘들에 비하여 Mobilenetv2가 가장 높은 성능을 보였다.
Table 4.
Learning results
결론
본 연구에서는 인공지능을 활용하여 MMS장비와 드론으로 구한 영상데이터를 활용하여 도로 노면의 균열을 검출하기 위한 방법론을 제시하였다.
MMS와 드론의 특성에 맞는 데이터 취득 방법과 전처리 방법을 제안하였고 각 장비에서 취득되는 영상의 특징을 기반으로 라벨링을 진행하였다. 드론과 MMS로 취득한 데이터를 기반으로 Basic CNN과 Mobilenetv2을 활용하여 균열패치와 균열이 없는 패치를 분류하기 위한 알고리즘 수정을 진행하였다. 또한 수정된 알고리즘으로 학습한 분류결과를 비교하였다. 분석결과 정확도 지표에서 Mobilenetv2에서 MMS데이터 95%, 드론데이터 78%의 분류결과를 도출해 낼 수 있었다. MMS와 드론과 같은 신기술장비를 도입하여 기존의 도로 상태 전문 조사 장비와 비슷한 성과를 얻을 수 있거나 혹은 그 이상의 정확도를 도출할 수 있다는 것을 확인하였다.
본 연구에서는 기존 도로 상태 전문 조사 장비가 가지는 문제점인 고가, 저속주행 및 분석과 운용의 어려움 등의 한계를 보완하였다. 또한 지자체 도로관리 예산상의 제약과 전문가 확보의 어려움을 겪고 있는 도로상태 모니터링과 인프라 자산관리시스템(Infrastructure Asset Management)의 기초 데이터 확보를 위한 새로운 방안을 제시하였다고 판단된다.
본 연구 성과를 활용하여 기존 조사비용보다 저렴하고 조사에 소요되는 시간은 단축되어 기존 PMS를 활용하고 있는 지자체의 조사 방법과 조사주기에도 변화를 가져올 수 있을 것이다. 나아가 도로노면의 상태등급 분류와 노면의 파손(deterioration) 예측 모형에도 활용할 수 있을 것으로 기대된다.
향후 연구과제로는 정확도를 향상시키기 위한 포장의 표면데이터의 추가 확보(big data)와 도로 표면의 상태를 검출할 수 있는 최적 알고리즘(algorithm)의 개발이 필요할 것이다.
